Embed Size (px)
Citation preview

MPSI/PCSI DM N°1 : Sujet S2I
Lycée Claude Fauriel Page 1 sur 16
DM N°1 Le devoir comporte 2 problèmes
Problème N°1: Chariot de golf
Le terrain de golf est constitué d’un parcours comprenant de 9 à 18 trous, que le
golfeur doit parcourir successivement. La distance totale effectuée pour 18 trous
est d’environ 8 km et le temps de jeu d’environ 4h. Ce parcours peut être plus ou
moins accidenté selon le profil du terrain : Il comporte des pentes plus ou moins
abruptes, une zone roulante appelée « fairway » ou l’herbe est tondue courte et
une zone d’herbe plus haute appelée « rough ». Selon la saison, le sol est sec ou
boueux. L’ensemble des clubs nécessaires (maximum de 14) ainsi que le sac
permettant de les ranger représente un poids d’environ 20 kg.
Le joueur de golf doit parcourir les 18 trous en transportant tout son matériel dans les
différentes zones du terrain, ce qui correspond, pour un joueur moyen, à une centaine
de coups effectués donc une centaine d’arrêts pour poser et reprendre son sac.
Afin de permettre au joueur d’économiser le maximum d’énergie, le transport du
matériel est assuré par un chariot à énergie électrique embarquée.
Le besoin peut être exprimé par le schéma suivant
Analyse du besoin
Lors d'une analyse du besoin, les concepteurs sont amenés à se demander si le besoin pourrait disparaître.
Q1. Citer une solution (réaliste!) qui pourrait faire disparaître ou faire évoluer ce besoin.

MPSI/PCSI DM N°1 : Sujet S2I
Lycée Claude Fauriel Page 2 sur 16
Q2. Préciser l’exigence 1.1.1 compte tenu des caractéristiques de la fiche technique ci-dessous

MPSI/PCSI DM N°1 : Sujet S2I
Lycée Claude Fauriel Page 3 sur 16
La fiche technique du chariot est la suivante :
Masse du chariot : 11 à 14kg suivant le type de roues
Coloris : vert, bleu, gris
Dimensions : 580x680x350
Vitesse : mini 1km/h, maxi 8 km/h
Batterie DRYFIT A500C 24Ah + Chargeur automatique
Autonomie : 25 à 36 trous
Temps de recharge : 8h
Roues EVA
Témoin sonore de gestion de la batterie
Mémorisation de la vitesse réglable
Sécurité : tension de la batterie inférieure à 12 V
Masse de sac supportée : 20kg
Précision du positionnement du sac : +- 30mm
Sécurité par sangles velcro
Angle de braquage : 360°
Pas d'outillage pour le démontage ou le montage
Résistance au soleil et à l'oxydation garantie 5 ans
Prix d'achat : 780 euros
Options disponibles : roues réglables et auto-nettoyantes, système anti-
basculement, frein à friction réglable, support avant professionnel
Ce chariot est doté d’une électronique gérée par microprocesseur offrant souplesse et sécurité. Un démarrage
progressif assure un confort de conduite. La vitesse est réglable et
mémorisée à chaque fois que le contacteur marche/arrêt est actionné. En
cas de blocage de la roue ou surchauffe du moteur, le chariot est protégé
par une sécurité électronique (système de débrayage électronique). Les
roues avant sont réglables pour assurer un déplacement en parfaite ligne
droite. Elles sont également autonettoyantes (raclettes).
Le chariot de golf est un véhicule avec énergie embarquée. L’alimentation
en énergie est assurée par un accumulateur (batterie) de 24 Ah et une
tension de 12 V.
La motorisation est constituée d’un moteur couplé à un réducteur à roue et
vis sans fin transmettant le mouvement aux roues. Pour effectuer les
virages facilement, les roues sont couplées à un différentiel permettant la
répartition de puissance adéquate.
Le châssis repliable comporte un berceau permettant de recevoir le sac de
golf immobilisé par des lanières. La poignée de commande est réversible et
permet un pilotage aisé pour les droitiers comme pour les gauchers. Un
système de réglage permet également d'adapter la hauteur de la poignée.
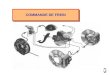
Le pilotage est assuré par une carte de commande (B ou C selon une
disposition pour gaucher ou droitier) située dans la poignée et une carte de
puissance située dans un boîtier sous la batterie. Le bouton poussoir D, logé
dans la poignée permet la mise en marche et l’arrêt du système. Le
potentiomètre A permet de faire varier la vitesse du chariot. Au démarrage,
la vitesse augmente progressivement jusqu’à atteindre la vitesse de consigne
déterminée par la position du potentiomètre.
Ce départ en « douceur » géré par un microcontrôleur situé dans la poignée de commande, permet une meilleure
synchronisation avec le déplacement de l’usager et une économie de l’énergie. Il est toujours possible, en cours
d’utilisation, d’augmenter ou de réduire la vitesse du chariot (en jouant sur la vitesse du chariot, le chariot peut

MPSI/PCSI DM N°1 : Sujet S2I
Lycée Claude Fauriel Page 4 sur 16
monter des zones abruptes). La charge de la batterie est contrôlée à chaque démarrage du chariot. L’utilisateur est
averti du taux de décharge par des bips successifs de courtes durées et des LED témoins. Lorsque la tension de la
batterie atteint une valeur trop faible ou que la température du circuit de l’électronique de puissance s’élève, le
chariot s’arrête et 4 bips avertissent l’utilisateur.
Q3. Il manque un bloc important de la poignée de commande sur le BDD. L'identifier et compléter le BDD
en conséquence sur le document réponse. Q4. A quel constituant électrique simple correspond le potentiomètre de la poignée ?
Dia
gra
mm
e d
e B
loc
(«
Bd
d »
)

MPSI/PCSI DM N°1 : Sujet S2I
Lycée Claude Fauriel Page 5 sur 16
Diagramme de Blocs internes (« IBD »)
Q5. Rajouter sur cet IDD le bloc oublié dans le BDD, ainsi que les flux et les ports associés. Répondre sur
le document réponse

MPSI/PCSI DM N°1 : Sujet S2I
Lycée Claude Fauriel Page 6 sur 16
L'architecture de la chaîne fonctionnelle est donnée partiellement dans le document réponse.
Q6. En vous aidant des énergies transitant entre les constituants et les informations, compléter ces chaînes
fonctionnelles en donnant le nom du constituant et sa fonction générique (alimenter, convertir,…) ainsi
que la matière d'œuvre entrante et sortant.
Le moteur est alimenté en 12V (valeur maximale). L'utilisateur entre une valeur de consigne par l'intermédiaire
du potentiomètre. Il appuie ensuite sur le bouton « marche/arrêt » de la poignée. Le cycle de commande est
ensuite réalisé de la façon suivante :
le microprocesseur vient lire la valeur de consigne et obtient ainsi une tension de consigne Vcons
constante.
Il détermine ensuite une rampe de démarrage d'une durée T à partir de la valeur 0 jusqu'à la valeur Vcons.
Il maintient ensuite cette valeur Vcons jusqu'à une modification de consigne par l'utilisateur ou appui sur
le bouton « marche/arrêt ». On obtient ainsi la tension de commande du moteur.
L'expression temporelle de la tension de commande en fonction de Vcons et T s’écrit alors :
( ) .( . ( ) ( ). ( ))com
Vconsu t t u t t T u t T
T (avec u(t) l’échelon unitaire)
La fonction ( ). ( ) t T u t T correspond à une fonction rampe retardée dans le temps de la valeur constante T : son
tracé est le suivant :
Q7. Tracer l'allure de la tension de commande du moteur en fonction du temps
Q8. Donner l’expression de la transformée de Laplace de ucom(t) notée Ucom(p) en fonction de Vcons et T.
On utilisera le résultat du cours sur le théorème du retard.
On adapte le système en ajoutant un capteur de vitesse qui permet de mesurer la vitesse des roues. La partie
commande compare la tension consigne ( )cu t , image de la vitesse ( )cv t définie par l'utilisateur au moyen du
potentiomètre de la poignée, à la tension ( )eu t délivrée par le capteur de vitesse proportionnelle à la vitesse du
chariot ( )v t . On note ( )r t la vitesse de rotation des roues. La partie commande corrige l'écart
( ) ( ) ( )c et u t u t à l'aide d'un correcteur et élabore ainsi la tension de commande ( )mu t du moteur. La vitesse
de rotation du moteur ( )m t est réduite par un réducteur roue/vis qui permet la rotation des roues.
Q9. A partir des informations précédentes, Donner le schéma-bloc fonctionnel en précisant bien le nom des
composants ainsi que les variables et leurs unités entre les composants. On prendra ( )cv t comme entrée
et ( )v t comme sortie.
Les paramètres précédents permettent de simuler le système avec et sans asservissement. On obtient alors les
deux réponses indicielles (consigne de8 km/h) données sur le document réponse.
Q10. Quel est le nom de l'entrée utilisée pour obtenir une réponse indicielle ? Tracer l'allure de cette entrée
1
t
T T+1

MPSI/PCSI DM N°1 : Sujet S2I
Lycée Claude Fauriel Page 7 sur 16
Q11. Quantifier la précision en régime permanent (appelé écart statique en position) des deux systèmes
sachant que la consigne est de 8km/h.
Q12. Déterminer, en justifiant votre résultat (tracé sur document réponse), la valeur du temps de réponse à
5% pour les deux systèmes (le temps de réponse à 5% est le temps que met le système pour donner
±5% de sa réponse en régime permanent). Donner également le dépassement de la valeur
asymptotique (quand cela est possible) en pourcentage de celle-ci.
Q13. Est-il nécessaire d'installer un asservissement pour le chariot ? Justifier.
Problème N°2 : Chaudière à bois déchiqueté (extrait de « petites mines » 2010)
I.Présentation générale
Dans le cadre du « Grenelle de l’environnement » et de la mise en place de la « taxe carbone », l’avenir du
chauffage est conditionné au fait que la biomasse est neutre en dégagement de CO2. HARGASSNER développe
la technologie du chauffage au bois déchiqueté et aux granulés de bois dans le but de concilier un chauffage à la
fois écologique et confortable d’utilisation. L’entreprise est devenue un leader en matière de technique
innovante, de développement, de service, de qualité et de longévité dans le domaine du chauffage au bois.
L’étude porte sur la chaudière HSV 30, alimentée en bois déchiqueté, qui développe une puissance de chauffe de
25 à 35 kW.
Figure 1 : photo de la chaudière à bois déchiqueté HSV30
Figure 2 : diagramme de cas d’utilisation en phase de fonctionnement
automatique pour un chauffage central domestique (usage général)

MPSI/PCSI DM N°1 : Sujet S2I
Lycée Claude Fauriel Page 8 sur 16
Le bois déchiqueté est amené jusqu’à la chaudière dans un premier temps à l’aide d’un extracteur à lames puis de
la vis d’extraction et enfin par la vis d’introduction. Il est alors brûlé au sein d’un foyer réfractaire développant
des gaz dans la chambre de combustion. Les gaz sont dépoussiérés dans la chambre de détente avant de passer
dans un échangeur tubulaire équipé de turbulateurs. Ces turbulateurs augmentent l’efficacité de l’échangeur et
permettent son nettoyage automatique. L’échangeur permet le chauffage de l’eau à partir des fumées. Une vis de
dépoussiérage et une vis de décendrage, associées aux turbulateurs évacuent automatiquement les cendres et les
suies dans un cendrier.
Figure 3 : Eléments constitutifs de la chaudière HSV30
Figure 4 : Diagramme de Blocs de la chaudière
L’objectif de l’étude est de modéliser le comportement de la chaudière lors de la mise en chauffe de l’eau du
circuit de chauffage central. Cette modélisation va permettre de valider les réglages constructeur de certains
constituants de l’asservissement en température de la chaudière.

MPSI/PCSI DM N°1 : Sujet S2I
Lycée Claude Fauriel Page 9 sur 16
Extrait du cahier des charges concernant l’asservissement en température de la chaudière :
exigence critères niveaux
Augmenter la température d’eau du
circuit de chauffage d’une
installation à chauffage central
Valeurs de consigne 75°C < Tc < 85°C
écart de température en régime
permanent avec la température de
consigne
nul
Temps d’établissement à ±5% de la
température stabilisée 10 min
Dépassement relatif de la
température en régime transitoire < 10 % de la température stabilisée
II.Modèle de connaissance du corps de chauffe de la chaudière
L’étude porte sur la montée en température de l’eau qui sert à chauffer les pièces au travers de radiateurs. Cette
température est obtenue à partir d’une puissance calorifique fournie par le bois brûlé au niveau du foyer
réfractaire de la chaudière.
Figure 5 : Détail des constituants du corps de chauffe
II.1.Modélisation du corps de chauffe
Objectif : obtenir un modèle de connaissance du corps de chauffe pour pouvoir simuler l’asservissement de température

MPSI/PCSI DM N°1 : Sujet S2I
Lycée Claude Fauriel Page 10 sur 16
On considère que :
- p(t) est la puissance calorifique en Watt
fournie par le bois brûlé au niveau du foyer
réfractaire. Elle permet la montée en
température du bâti de la chaudière.
- L’air situé dans la chambre de combustion
permet de monter à la température e(t)
l’eau située dans l’échangeur.
- L’eau chaude, au travers des radiateurs
permet de chauffer les pièces à une
température ext(t).
On note :
- b(t) la température du bâti de la chaudière
- mb la masse du bâti à monter en température mb = 200 kg
- cb la capacité calorifique massique du bâti cb = 500 J.kg-1
.K-1
- a(t) la température de l’air dans la chambre de combustion
- ma la masse de l’air à monter en température ma = 2 kg
- ca la capacité calorifique massique de l’air ca = 700 J.kg-1
.K-1
- e(t) la température de l’eau dans l’échangeur et les radiateurs
- me la masse de l’eau à monter en température dans l’échangeur me = 50 kg
- ce la capacité calorifique massique de l’eau ce = 4000 J.kg-1
.K-1
- ext(t) la température ambiante des pièces à chauffer.
Le principe de conservation de l’énergie conduit à une modélisation par les équations différentielles suivantes :
Avec :
Kab la conductance thermique entre le bâti et l’air dans la chambre de combustion : Kab = 40 J.s-1
.K-1
Kae la conductance thermique entre l’air et l’eau au travers de l’échangeur ou des radiateurs : Kae = 400 J.s-1
.K-1
On suppose que le corps de chauffe est parfaitement isolé de l’extérieur.
Les transformées de Laplace seront notées : L[i(t)] = Ti(p) et L[p(t)] = P(p).
Q1. En supposant que les conditions initiales sont nulles (conditions de Heaviside), donner dans le domaine de
Laplace, la transformée des 3 équations différentielles précédentes.
Figure 6 : Schéma thermodynamique du corps de chauffe

MPSI/PCSI DM N°1 : Sujet S2I
Lycée Claude Fauriel Page 11 sur 16
Q2. Exprimer Tb(p) en fonction de Ta(p) et de P(p) en faisant apparaître les variables mb, cb et Kab et mettre
Tb(p) sous la forme Tb(p) = H1(p)Ta(p) + H2(p)P(p).
Préciser l’ordre du système défini par la fonction de transfert H1(p), ainsi que, littéralement, ses
caractéristiques. Calculer la valeur numérique approchée de 1, la constante de temps de ce système.
Donner le schéma bloc équivalent en n’utilisant que les variables Kab et 1.
Q3. Exprimer Ta(p) en fonction de Te(p) et de Tb(p) en faisant apparaître les variables ma, ca, Kae et Kab.
Mettre Ta(p) sous la forme Ta(p) = H3(p)Te(p)+H4(p)Tb(p).
Préciser l’ordre des systèmes définis par les fonctions de transfert respectives H3(p) et H4(p), ainsi que,
littéralement, leurs caractéristiques (gains statiques et constantes de temps). Donner les valeurs numériques
des constantes de temps identifiées.
Dans la suite de l’étude, on suppose que Kae est très grand devant Kab, ainsi le schéma bloc ayant pour entrées
Tb(p) et Te(p) et pour sortie Ta(p) peut se mettre sous la forme suivante :
Figure 7 : schéma bloc partiel du modèle de connaissance du corps de chauffe
Q4. Exprimer Te(p) en fonction de Ta(p) et de Text(p).
Préciser l’ordre du système défini ainsi que, littéralement, ses caractéristiques.
Calculer la valeur numérique approchée de 5, la constante de temps de ce système.
Tracer le schéma bloc ayant pour entrées Ta(p) et Text(p) et pour sortie Te(p), en n’utilisant que la variable
5.
Q5. Recopier et compléter le schéma bloc ci-dessous. Il représente un modèle de connaissance du corps de
chauffe ayant pour entrée P(p), pour sortie Te(p) et comme perturbation Text(p). A l’intérieur des blocs, on
ne fera apparaître que les paramètres suivants : Kab, Kae, 1, 3 et 5.
II.2.Etude du système autour d’un point de fonctionnement
La suite de l’étude porte sur la dynamique du système autour d’un point de fonctionnement. Nous allons
considérer le système non perturbé donc tel que Text(p)=0.
+
+ +
+ +
+
Figure 8 : schéma bloc complet du modèle de
connaissance du corps de chauffe

MPSI/PCSI DM N°1 : Sujet S2I
Lycée Claude Fauriel Page 12 sur 16
De plus comme la constante de temps 1 est grande devant 3, le schéma bloc du système peut alors se
représenter sous la forme suivante :
Figure 9 : schéma bloc réduit du modèle de connaissance du corps de chauffe
Q6. Après avoir transformé le schéma bloc ci-dessus, donner la fonction de transfert 𝐻(𝑝) = 𝑇𝑒(𝑝)
𝑃(𝑝) . Il est
demandé de ne pas développer les produits d’éléments de la forme (1+ip), mais de les conserver sous une
forme factorisée la plus simple.
II.3.Réponse de la chaudière à partir d’un modèle simplifié
A partir des résultats obtenus précédemment, on peut considérer que : Kab << Kae, 3 << 5 et que 3 << 1. De ce
fait, dans la suite de cette étude, on pourra utiliser la fonction de transfert simplifiée :
On considère que le corps de chauffe de la chaudière est soumis à un échelon de puissance de chauffe
p(t) = P0.u(t) où u(t) est la fonction causale (échelon unitaire), avec P0 = 10 kW.
Q7. Calculer, à partir de ce modèle simplifié et par application des théorèmes de la valeur initiale et de la
valeur finale, les valeurs initiales (e(0+))et finales prévisibles(e()) pour les températures de l’eau e(t),
préciser les pentes à l’origine (�̇�𝑒(0+)) et en régime permanent (�̇�𝑒(∞)).
Q8. Tracer l’allure de la réponse e(t) à une entrée échelon de puissance de 10 kW. Faire figurer sur le
graphique tous les éléments remarquables de la réponse.
III.Modèle de l’asservissement en température
Objectif : valider des réglages de l’asservissement de température de la chaudière pour respecter le cahier des charges
III.1.Modèle de la structure de commande
Une température de consigne c(t) est donnée au système. Un dispositif électronique convertit celle-ci en une
tension vc(t) telle que Vc(p) = Kc . Tc(p), Kc étant la constante de conversion que l’on cherche à déterminer.
Cette tension vc(t) est comparée à la tension ve(t) fournie par un capteur de type thermocouple mesurant la
température de l’eau au sein de l’échangeur : e(t) telle que Ve(p) = Ke . Te(p), avec Ke = 0,2 Volt/°C.

MPSI/PCSI DM N°1 : Sujet S2I
Lycée Claude Fauriel Page 13 sur 16
Cette différence de tension est amplifiée par un correcteur proportionnel de gain constant noté C. sa valeur
sera obtenue par simulation du modèle de l’asservissement (partie III.3).
La tension obtenue permet au moteur de tourner à une vitesse de rotation
m (en rad/s).
Le moteur entraine la vis d’introduction (vis d’Archimède) qui fournit un
débit massique de bois (en Kg/s) au foyer où a lieu la combustion.
Ce bois au sein du foyer dégage une puissance de chauffe p(t) (en W).
Q9. Reproduire et compléter le schéma-bloc fonctionnel global ci-dessous sur votre copie. Préciser les
grandeurs physiques véhiculées, ainsi que leurs unités. Les blocs seront définis par leur nom. On notera :
une température T, une puissance P, une tension V, un débit massique D, une vitesse de rotation .
L’ensemble Moteur, Vis, Foyer et Corps de chauffe de la chaudière a été soumis à une entrée du type indicielle a
On a relevé sa réponse pour définir un modèle comportemental. Cette expérience permet d’établir un modèle
(une fonction de transfert) issu de la mise en équation précédente mais dont les valeurs numériques sont au plus
près de la réalité. Ce modèle est donné sous la forme de la fonction de transfert suivante :
Applications numériques : KMC = 0.3°C/V A = 120 s B = 360 s
Q10. Donner l’expression de la fonction de transfert en boucle fermée de l’asservissement :𝐻𝐺(𝑝) = 𝑇𝑒(𝑝)
𝑇𝑐(𝑝) en
fonction des différentes constantes définies. La mettre sous forme littérale canonique.
III.2.Réglage du convertisseur
La fonction de transfert HMC (p) étant de classe nulle, il convient de régler le convertisseur de consigne (gain Kc)
pour assurer la précision du système.
Q11. Par application du théorème de la valeur finale, déterminer la valeur en régime permanent de e(t) quand
on soumet l’ensemble à une consigne d’entrée de type échelon d’amplitude co constante de type c(t)
= co u(t). u(t)est la fonction d’Heaviside ou échelon unitaire.
Q12. En déduire la valeur de l’écart statique soit l’écart (t) =co u(t) - e(t) quand t→∞.
Q13. Déterminer l’expression de Kc en fonction de C, KMC et Ke, pour respecter le cahier des charges en termes
de précision statique ou précision en régime permanent ?
+
–
Figure 10 : vis d’Archimède pour
introduire le bois dans le foyer

MPSI/PCSI DM N°1 : Sujet S2I
Lycée Claude Fauriel Page 14 sur 16
III.3.Simulation de l’asservissement
Afin de déterminer la valeur adéquate de la correction proportionnelle choisie (valeur de C), une simulation du
modèle de l’asservissement étudié a été faite sur le logiciel multiphysique Scilab (voir figure 11)
La variable de Laplace notée p dans l’énoncé est notée s (pour variable symbolique) dans ce logiciel.
Les blocs associés à des gains purs sont représentés par des triangles
La consigne a été fixée à une valeur moyenne de 80°C en supposant une chaudière à température nulle
initialement.
La simulation donne les réponses suivantes (figure 12 et zoom figure 13) lorsque l’on teste plusieurs valeurs de
la constante C.
Figure 12 : réponse à un échelon de température de 80°C
Température
de consigne Température
d’eau
Moteur + Vis d’Archimède
+ Corps de chauffe
Capteur de température
Correcteur
proportionnel
Convertisseur
Figure 11 : Modèle de l’asservissement de température avec correction proportionnelle
Température d’eau en sortie d’échangeur (Te)
Temps en seconde

MPSI/PCSI DM N°1 : Sujet S2I
Lycée Claude Fauriel Page 15 sur 16
Figure 13 : réponse à un échelon de température de 80°C (Zoom)
Q14.Choisir parmi les valeurs testées de la correction proportionnelle C, celle qui permet d’assurer les
contraintes fixées par le cahier des charges. Justifier votre réponse vis-à-vis de l’extrait de cahier des
charges donné. Effectuer les tracés nécessaires sur les figures du document réponses.
Temps en seconde
Température d’eau en sortie d’échangeur (Te)

MPSI/PCSI DM N°1 : Sujet S2I
Lycée Claude Fauriel Page 16 sur 16
ANNEXES : Transformées de Laplace
f(t) F(p)
f(at) )a
p(F
a
1
f(t- ) e-p
F(p)
dt
)t(df pF(p) – f(0
+)
2
2
dt
)t(fd p
2 F(p) – pf(0
+) – f '(0
+)
n
n
dt
)t(fd p
n F(p) avec C.I. = 0
t
0
du)u(f p
)p(F avec C.I. = 0
(t) 1
u(t) p
1
!n
tn
.u(t) 1np
1
e-at
.u(t) ap
1
t e-at
.u(t) 2)ap(
1
sin t . u(t) 22p
cos t . u(t) 22p
p
Théorème de la valeur initiale : (si la limite existe) )p(F.plim)t(flimp0t
Théorème de la valeur finale : (si la limite existe) )p(F.plim)t(flim0pt