Embed Size (px)
Citation preview

Communication and Navigation System
Doro Gracia
Kazuya Suzuki
Patrick Zeitouni
2-Dec-04 USC 2004 AME 557 Space Exploration Architecture
Mission Requirements
Provide adequate communication between: Rovers Emergency transfer vehicles Bases and waypoints
Provide adequate navigation capability for: lunar landers rovers along race route
Establish: communications and navigation infrastructure.

2-Dec-04 USC 2004 AME 557 Space Exploration Architecture
Comm Requirements & Issues
High data rates from rovers: 4 active HDTV channels 12 Mbps per rover
Continuous Rover coverage From lunar equator to pole trek
Rovers Limitations: Power limited, Earth-Moon distance at that data rate cannot be achieved Antenna Pointing accuracy a problem during race (bounce) Complex antennas like phased arrays can solve pointing
problem, but are expensive, bulky, and are even more power inefficient
2-Dec-04 USC 2004 AME 557 Space Exploration Architecture
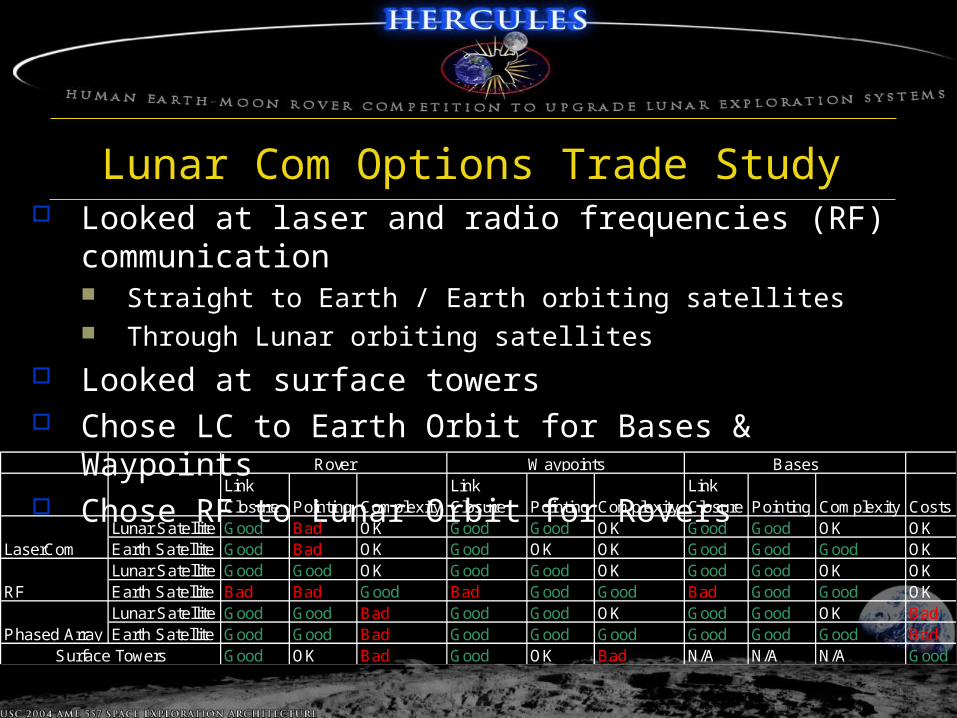
Lunar Com Options Trade Study Looked at laser and radio frequencies (RF) communication
Straight to Earth / Earth orbiting satellites Through Lunar orbiting satellites
Looked at surface towers Chose LC to Earth Orbit for Bases & Waypoints Chose RF to Lunar Orbit for Rovers
Link Closure Pointing Complexity
Link Closure Pointing Complexity
Link Closure Pointing Complexity Costs
Lunar Satellite Good Bad OK Good Good OK Good Good OK OKEarth Satellite Good Bad OK Good OK OK Good Good Good OKLunar Satellite Good Good OK Good Good OK Good Good OK OKEarth Satellite Bad Bad Good Bad Good Good Bad Good Good OKLunar Satellite Good Good Bad Good Good OK Good Good OK BadEarth Satellite Good Good Bad Good Good Good Good Good Good Bad
Good OK Bad Good OK Bad N/A N/A N/A Good
Waypoints Bases
LaserCom
RF
Phased ArraySurface Towers
Rover

2-Dec-04 USC 2004 AME 557 Space Exploration Architecture
LC
RF
GEO
Rover Com SystemGEO satellites either advanced TDRSS or commercial satellite equipped with optical head

2-Dec-04 USC 2004 AME 557 Space Exploration Architecture
Rovers have a 0.3m antenna Rovers communicate to Lunar orbit
Adequate link margin Relaxed pointing requirement
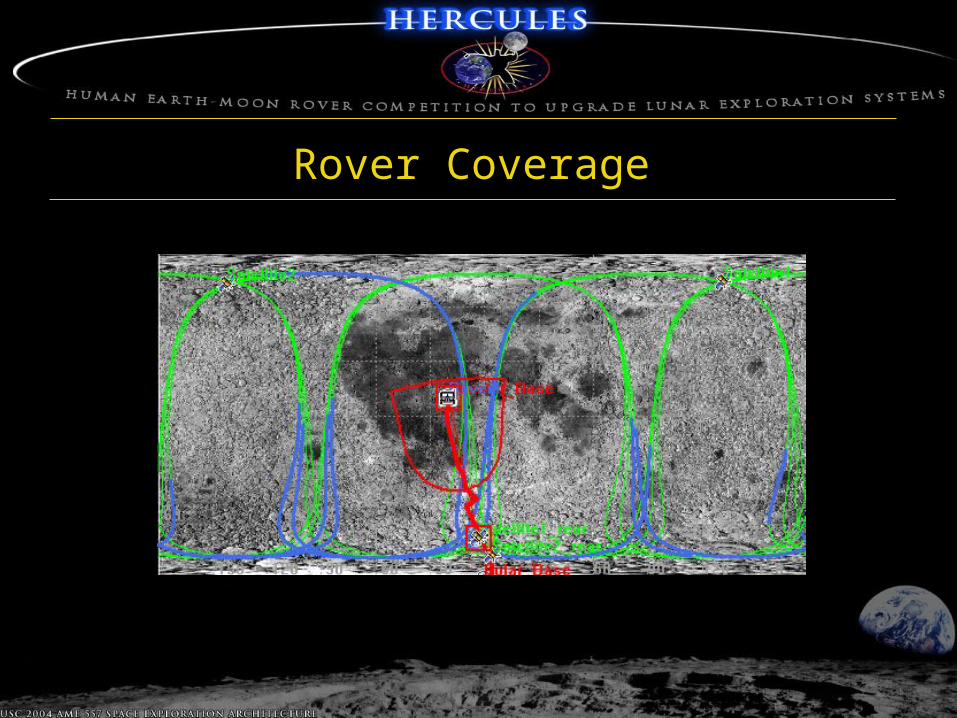
Satellite Constellation 0.6m Antenna to Lunar surface, LC back to Earth 4 satellites in 2 repeating ground track orbits
Inclined (85~90) to service poles Eccentric (0.6) to dwell longer in south pole Satellite pairs spaced 180° apart in same orbit to provide handoff
Rover Com System Details

2-Dec-04 USC 2004 AME 557 Space Exploration Architecture
Satellite Orbits
2-Dec-04 USC 2004 AME 557 Space Exploration Architecture
Rover Coverage

2-Dec-04 USC 2004 AME 557 Space Exploration Architecture
LCRF
GEO
Base & Waypoint Com System
Given their fixed locations, bases and waypoints communicate directly to Earth orbit using LC
GEO satellites either advanced TDRSS or commercial satellite equipped with optical head
2-Dec-04 USC 2004 AME 557 Space Exploration Architecture
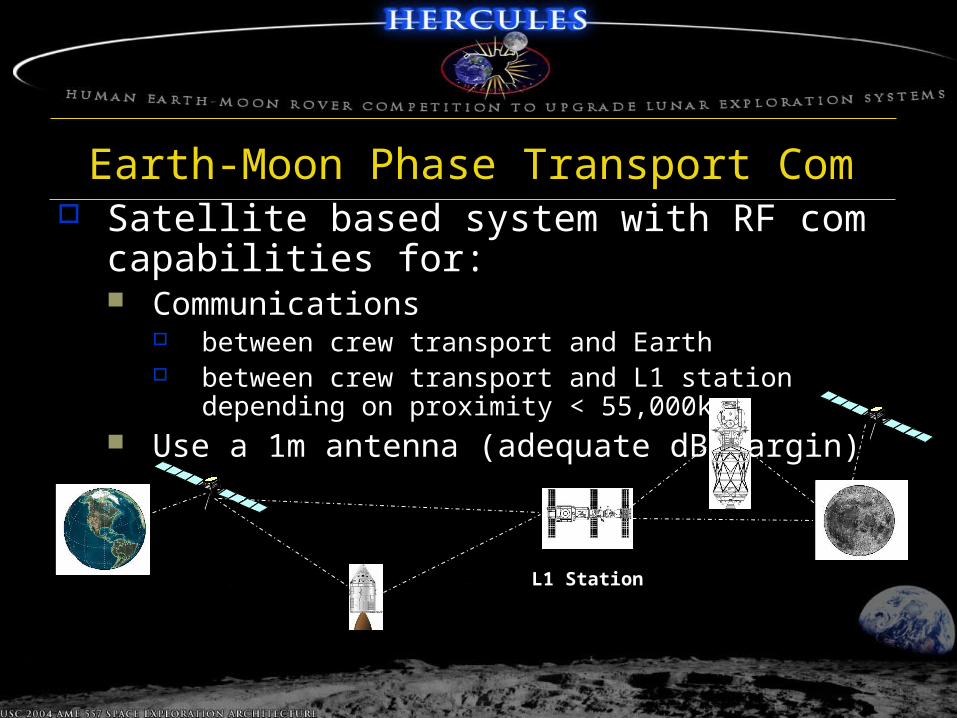
Earth-Moon Phase Transport Com Satellite based system with RF com capabilities
for: Communications
between crew transport and Earth between crew transport and L1 station depending on
proximity < 55,000km. Use a 1m antenna (adequate dB margin)
L1 Station

2-Dec-04 USC 2004 AME 557 Space Exploration Architecture
TV Programming
TV studios from Earth gateways provide live rover race feed (via satellites)
Continuous 24 hours a day coverage Daily summaries with highlights of events Pay-per-view provides:
In-depth analysis behind the scenes And more

2-Dec-04 USC 2004 AME 557 Space Exploration Architecture
Navigation Mission Requirements
Provide navigation capabilities for the following: Lunar landings (manned & unmanned) Rovers Rescue missions

2-Dec-04 USC 2004 AME 557 Space Exploration Architecture
Available Options
Satellites Towers Beacons Inertial systems Image Terrain Navigation (landmarks)

2-Dec-04 USC 2004 AME 557 Space Exploration Architecture
Landing navigation at bases Beacons (like existing airports)
Rover navigation Image terrain navigation for rovers
Backup guidance for rovers Inertial systems, recalibrated at waypoints Earth assistance
Proposed Systems
2-Dec-04 USC 2004 AME 557 Space Exploration Architecture
Emergency vehicle navigation Track the beacons on rovers
Beacons at Waypoints Assist in emergency or other landings
RF Buoys dropped by rovers Establish a route that future rovers can
follow Assist in emergency landings
Proposed Systems
2-Dec-04 USC 2004 AME 557 Space Exploration Architecture
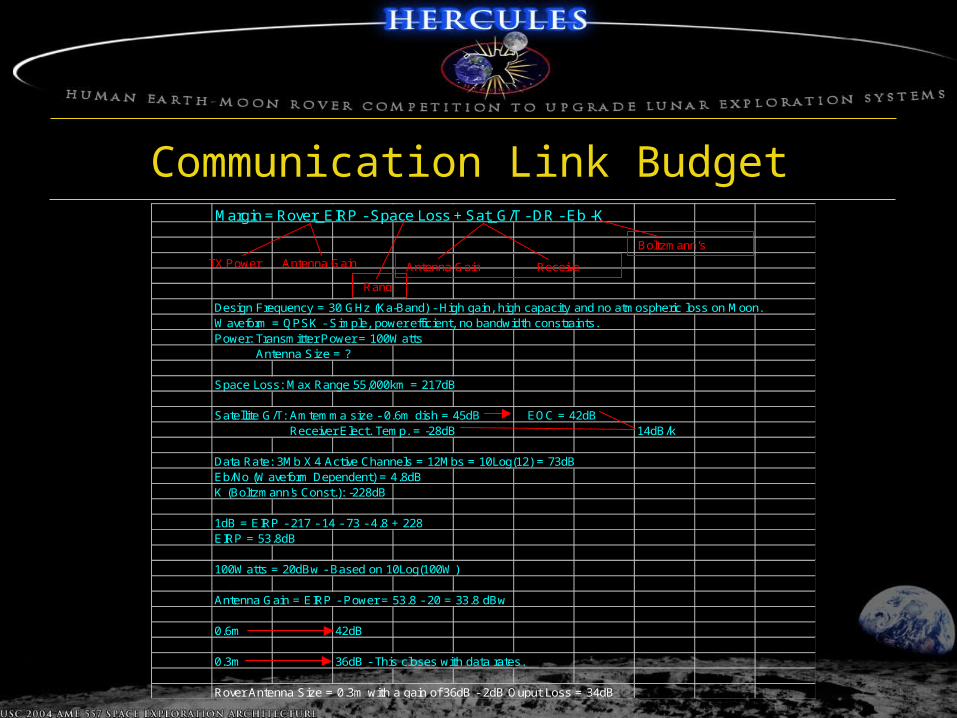
Communication Link BudgetMargin = Rover_EIRP - Space Loss + Sat_G/T - DR - Eb -K
Design Frequency = 30 GHz (Ka-Band) - High gain, high capacity and no atmospheric loss on Moon.Waveform = QPSK - Simple, power efficient, no bandwidth constraints.Power: Transmitter Power = 100Watts Antenna Size = ?
Space Loss: Max Range 55,000km = 217dB
Satellite G/T: Amtemma size - 0.6m dish = 45dB EOC = 42dB Receiver Elect. Temp. = -28dB 14dB/k
Data Rate: 3Mb X 4 Active Channels = 12Mbs = 10Log(12) = 73dBEb/No (Waveform Dependent) = 4.8dBK (Boltzmann's Const.): -228dB
1dB = EIRP - 217 - 14 - 73 - 4.8 + 228EIRP = 53.8dB
100Watts = 20dBw - Based on 10Log(100W)
Antenna Gain = EIRP - Power = 53.8 - 20 = 33.8 dBw
0.6m 42dB
0.3m 36dB - This closes with data rates.
Rover Antenna Size = 0.3m with a gain of 36dB - 2dB Ouput Loss = 34dB
TX Power Antenna Gain
Rang
Antenna Gain Receive
Boltzmann’s





























