Embed Size (px)
Citation preview
Complex trajectories of a simplependulum
Daniel W. Hook
Blackett Laboratory
Imperial College London
6th International Workshop on Pseudo-Hermitian Hamiltonians in Quantum Physics
City University London
16 July 2007
Complex trajectories of a simple pendulum – p. 1/22
Work based on:
Carl M. Bender, Darryl D. Holm, Daniel W. Hook (2007) “Complex Trajectories of aSimple Pendulum”, Journal of Physics A40, F81-F89, [math-ph/0609068]
Carl M. Bender, Darryl D. Holm, Daniel W. Hook (2007) “Complexified DynamicalSystems”, to appear: Journal of Physics A, [arXiv:0705.3893]
Carl M. Bender, Jun-Hua Chen, Daniel W. Darg, Kimball A. Milton “ClassicalTrajectories for Complex Hamiltonians” (2006) Journal of Physics A39, 4219-4238[math-ph/0602040]
Carl M. Bender, Daniel W. Darg (2007) “Spontaneous Breaking of Classical PTSymmetry”, [hep-th/0703072]
References – p. 2/22
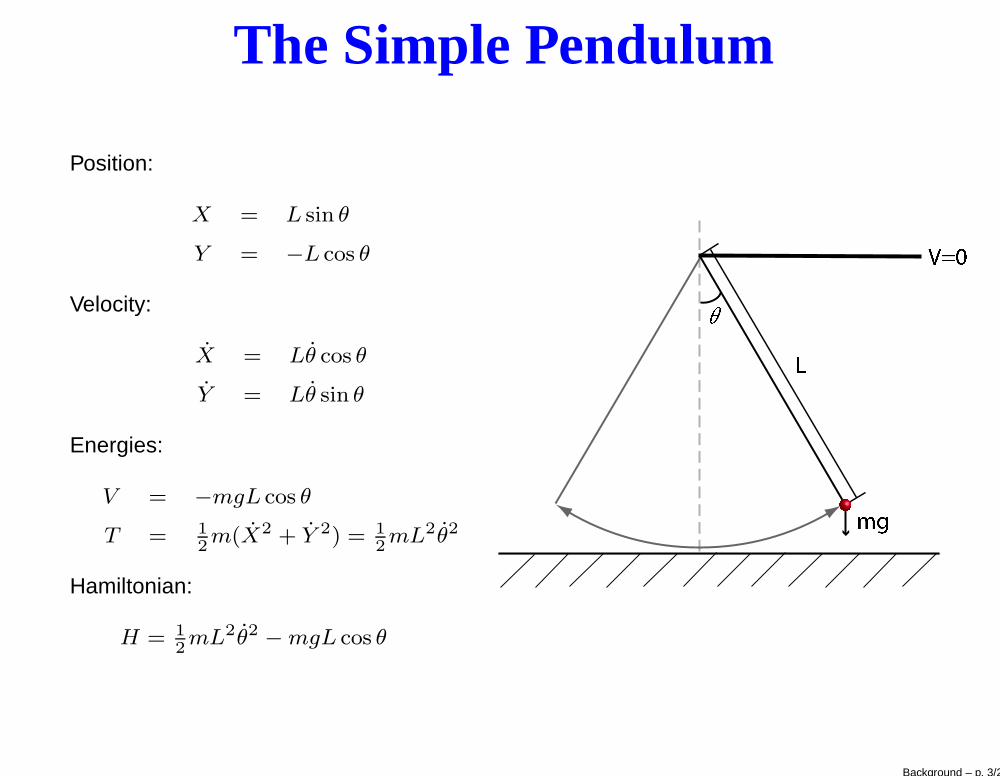
The Simple Pendulum
Position:
X = L sin θ
Y = −L cos θ
Velocity:
X = Lθ cos θ
Y = Lθ sin θ
Energies:
V = −mgL cos θ
T = 1
2m(X2 + Y 2) = 1
2mL2θ2
Hamiltonian:
H = 1
2mL2θ2
− mgL cos θ
Background – p. 3/22
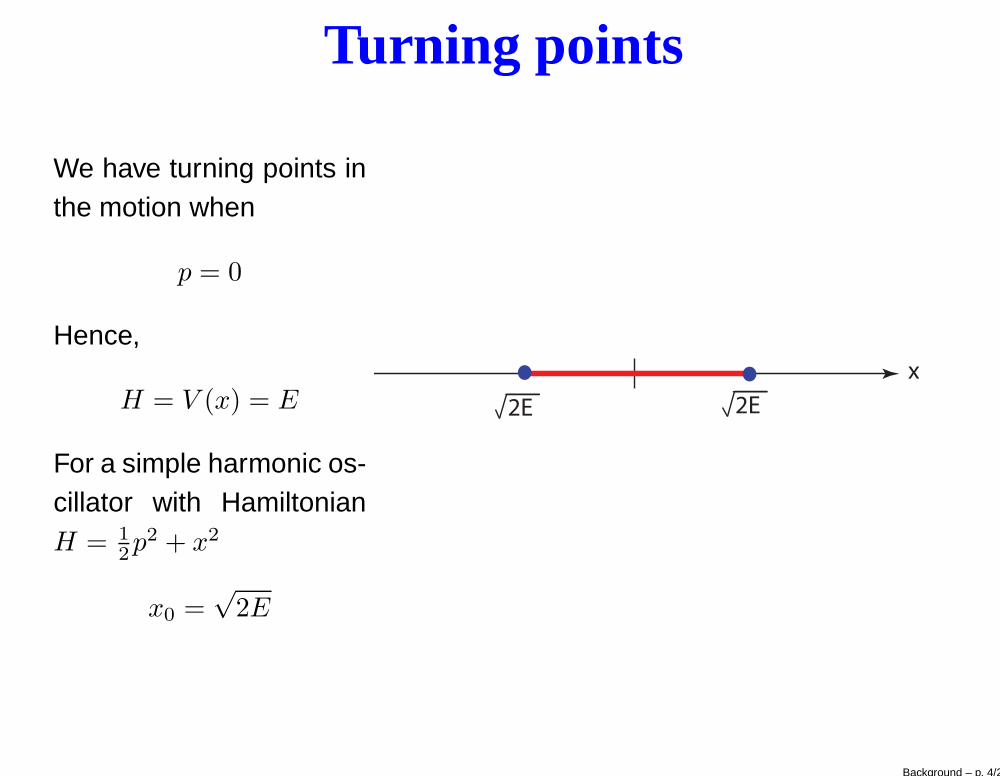
Turning points
We have turning points inthe motion when
p = 0
Hence,
H = V (x) = E
For a simple harmonic os-cillator with HamiltonianH = 1
2p2 + x2
x0 =√
2E
x
2E2E
Background – p. 4/22
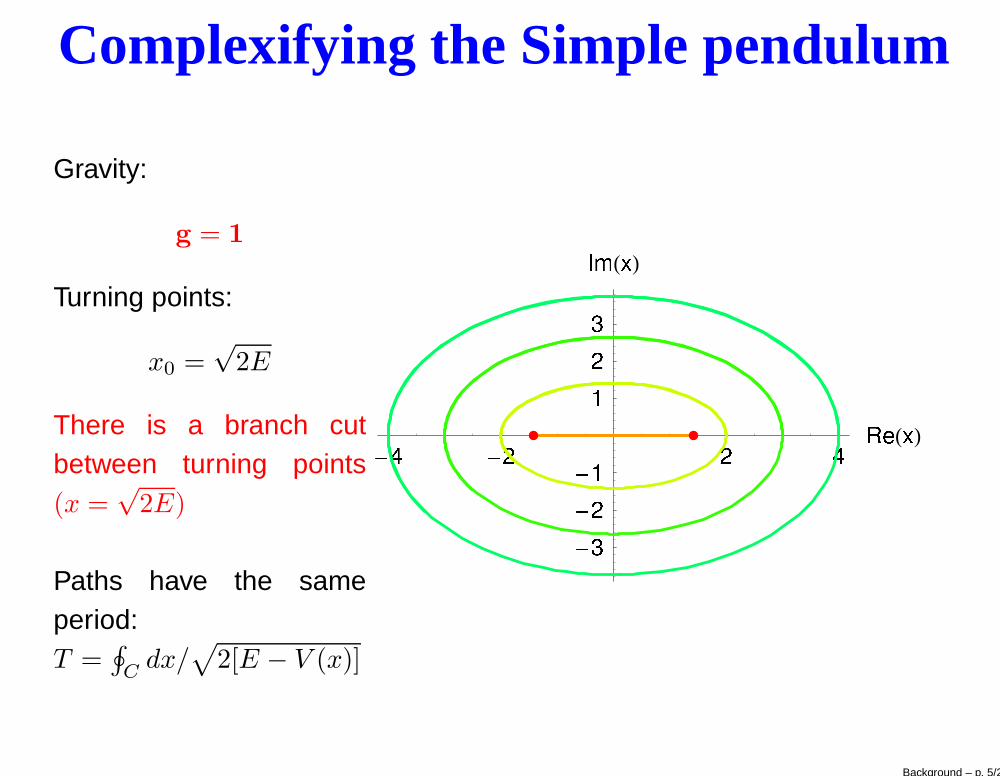
Complexifying the Simple pendulum
Gravity:
g = 1
Turning points:
x0 =√
2E
There is a branch cutbetween turning points(x =
√2E)
Paths have the sameperiod:T =
∮
Cdx/
√
2[E − V (x)]
Background – p. 5/22
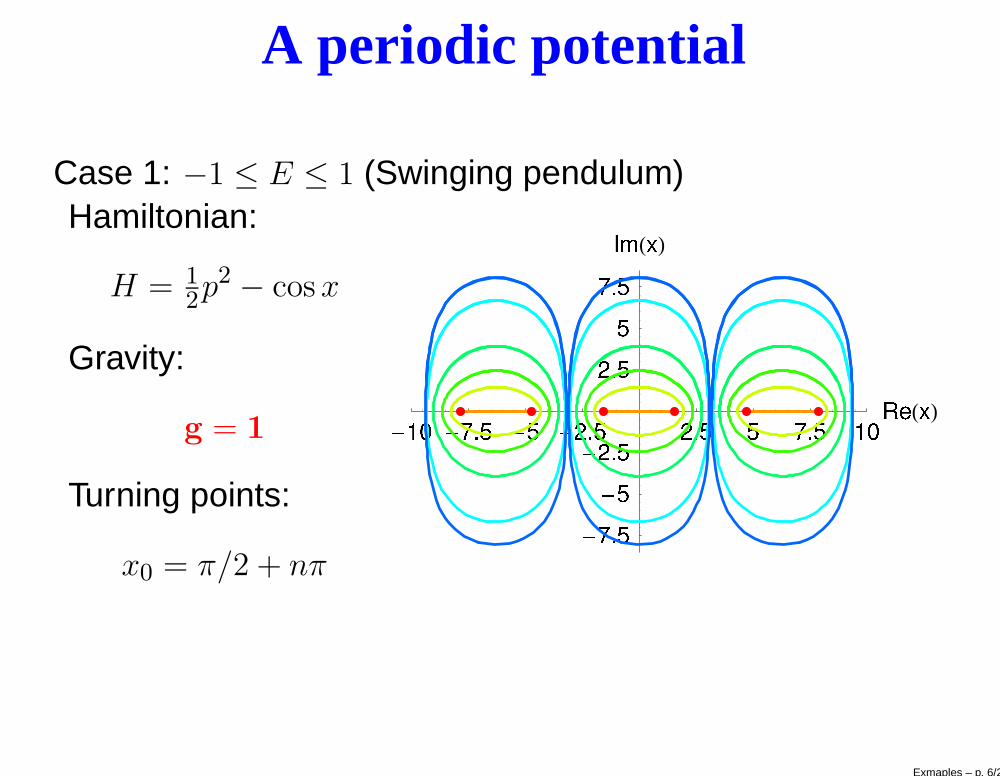
A periodic potential
Case 1: −1 ≤ E ≤ 1 (Swinging pendulum)Hamiltonian:
H = 1
2p2 − cos x
Gravity:
g = 1
Turning points:
x0 = π/2 + nπ
Exmaples – p. 6/22
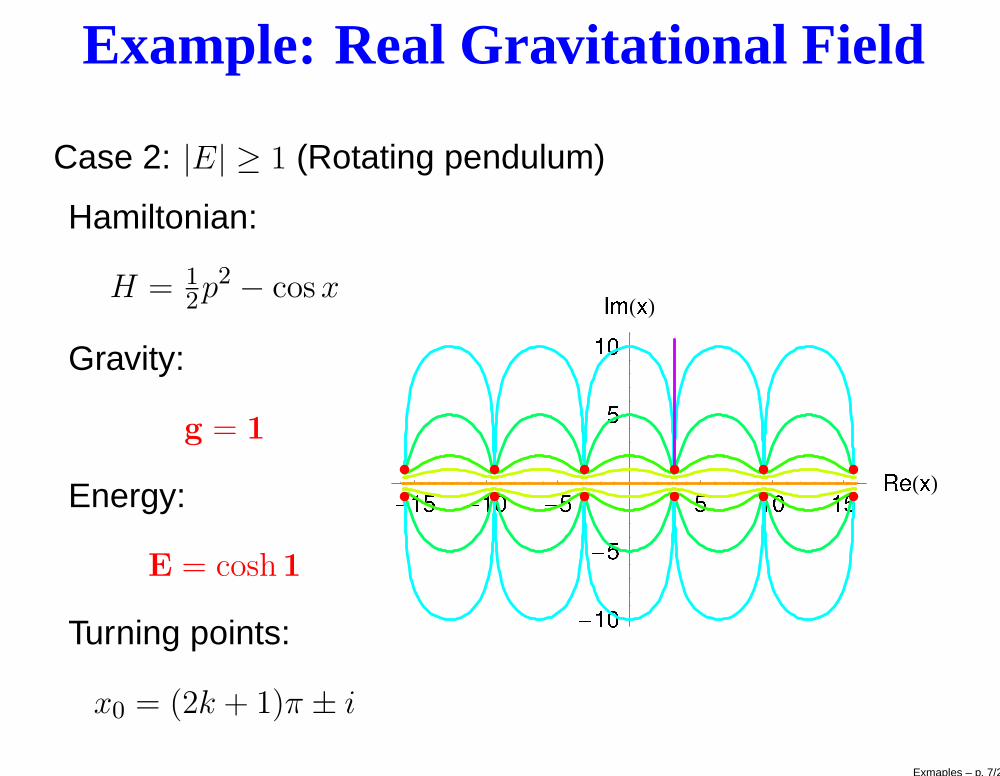
Example: Real Gravitational Field
Case 2: |E| ≥ 1 (Rotating pendulum)
Hamiltonian:
H = 1
2p2 − cos x
Gravity:
g = 1
Energy:
E = cosh1
Turning points:
x0 = (2k + 1)π ± i
Exmaples – p. 7/22
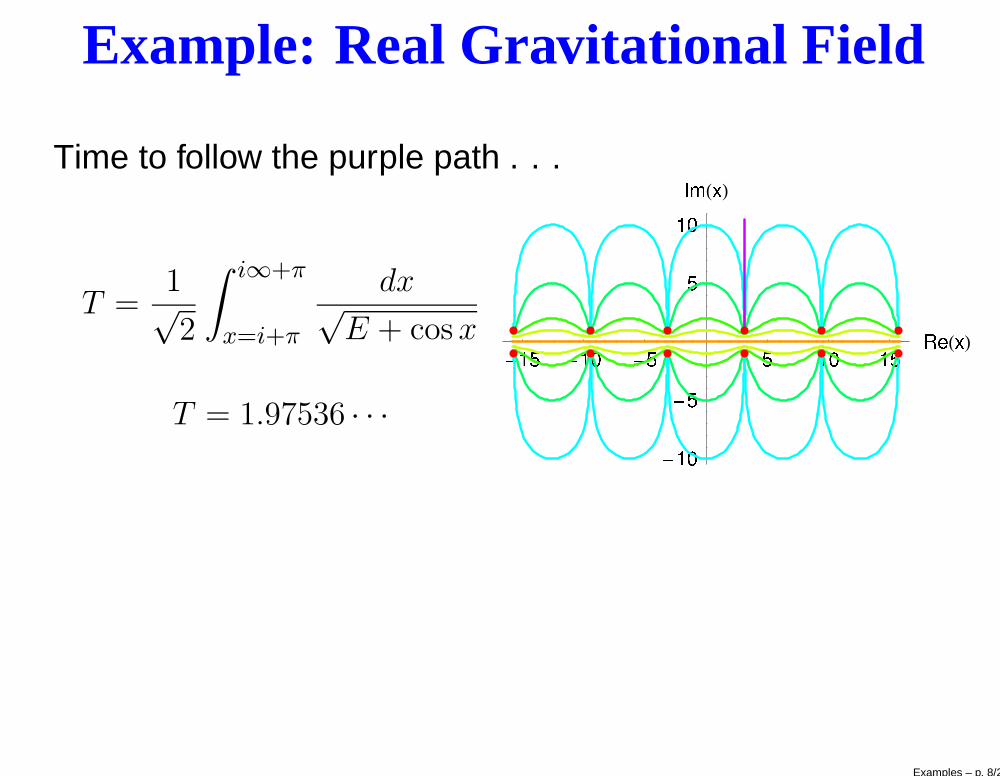
Example: Real Gravitational Field
Time to follow the purple path . . .
T =1√2
∫
i∞+π
x=i+π
dx√E + cos x
T = 1.97536 · · ·
Examples – p. 8/22
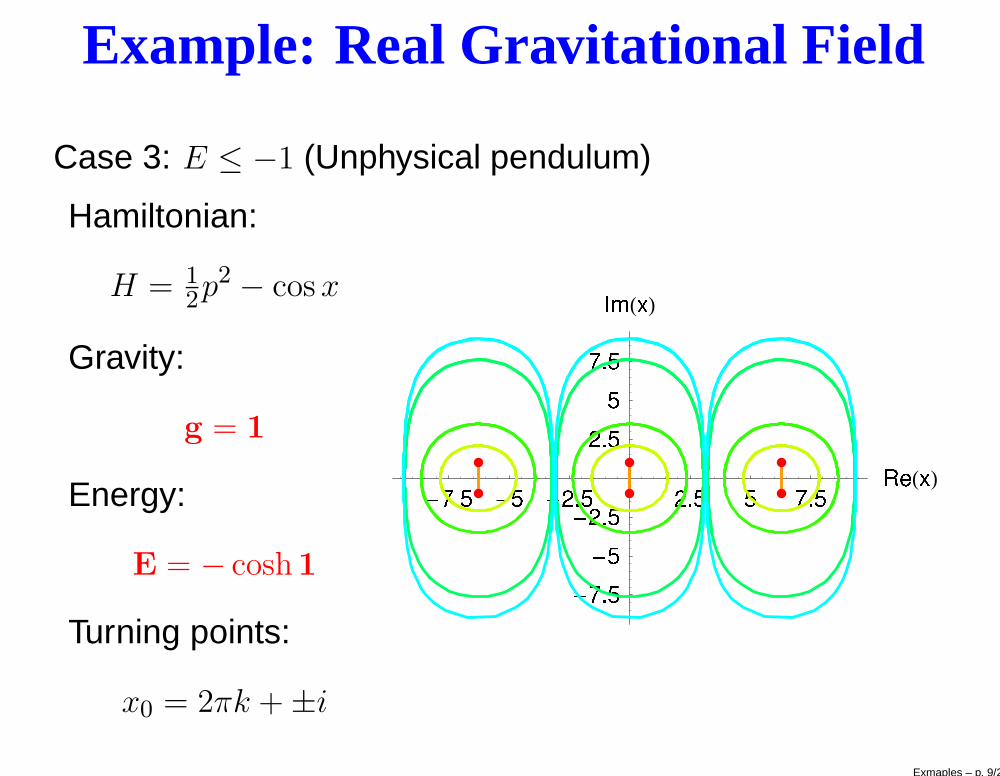
Example: Real Gravitational Field
Case 3: E ≤ −1 (Unphysical pendulum)
Hamiltonian:
H = 1
2p2 − cos x
Gravity:
g = 1
Energy:
E = − cosh1
Turning points:
x0 = 2πk + ±i
Exmaples – p. 9/22
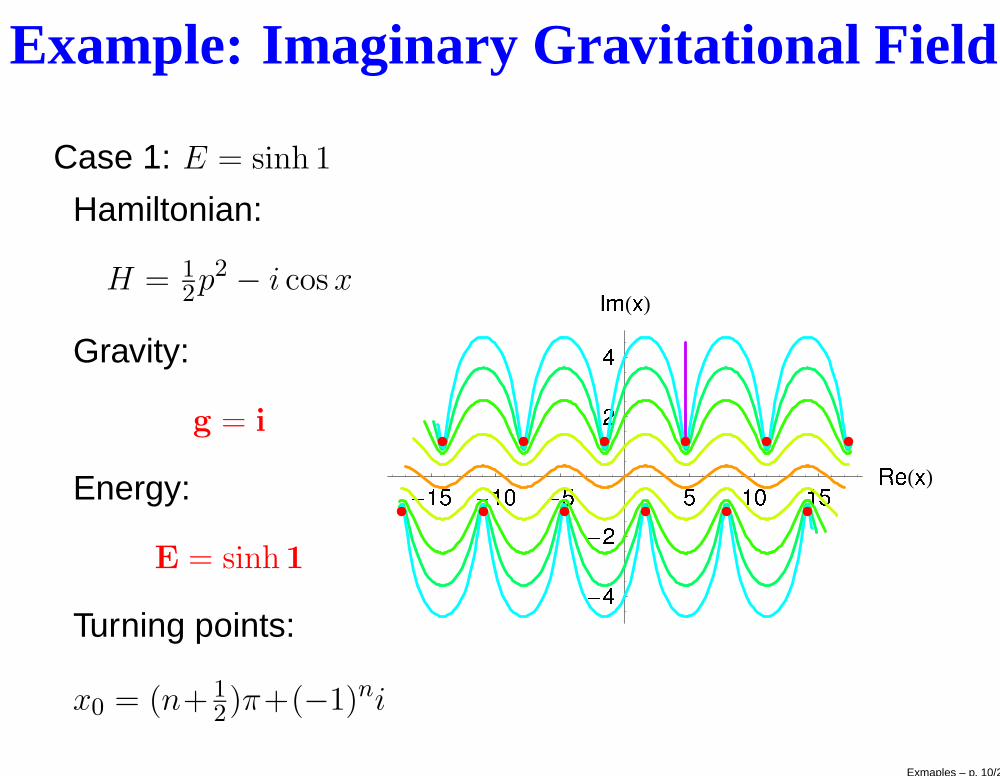
Example: Imaginary Gravitational Field
Case 1: E = sinh 1
Hamiltonian:
H = 1
2p2 − i cos x
Gravity:
g = i
Energy:
E = sinh1
Turning points:
x0 = (n+ 1
2)π+(−1)ni
Exmaples – p. 10/22
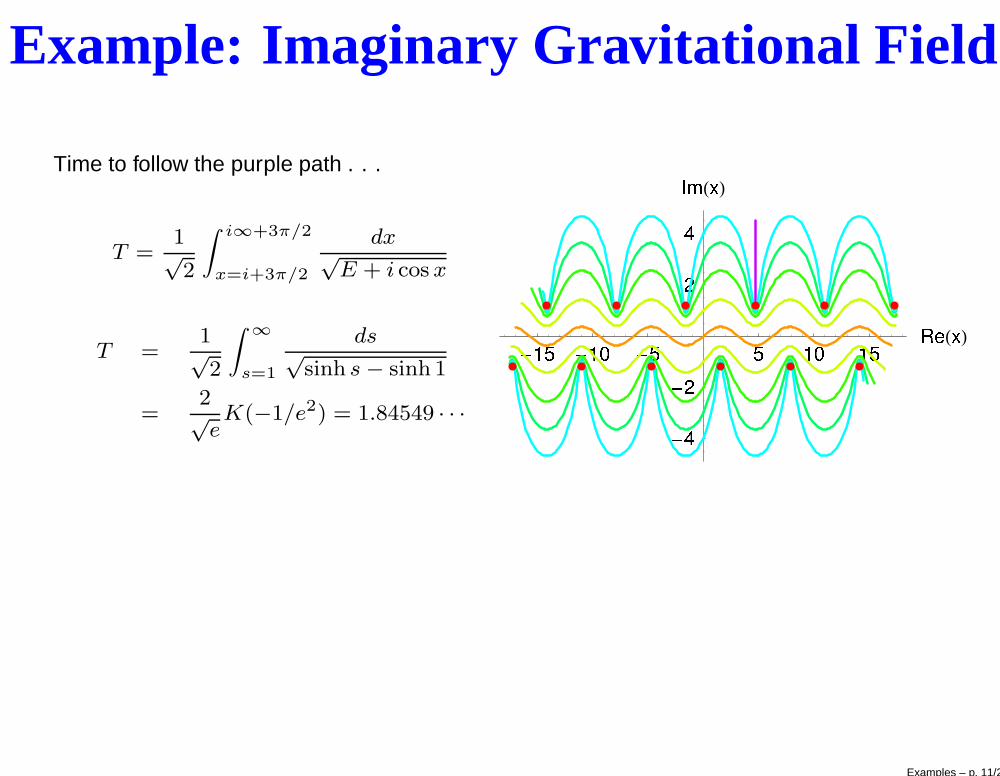
Example: Imaginary Gravitational Field
Time to follow the purple path . . .
T =1√
2
∫ i∞+3π/2
x=i+3π/2
dx√
E + i cos x
T =1√
2
∫
∞
s=1
ds√
sinh s − sinh 1
=2√
eK(−1/e2) = 1.84549 · · ·
Examples – p. 11/22
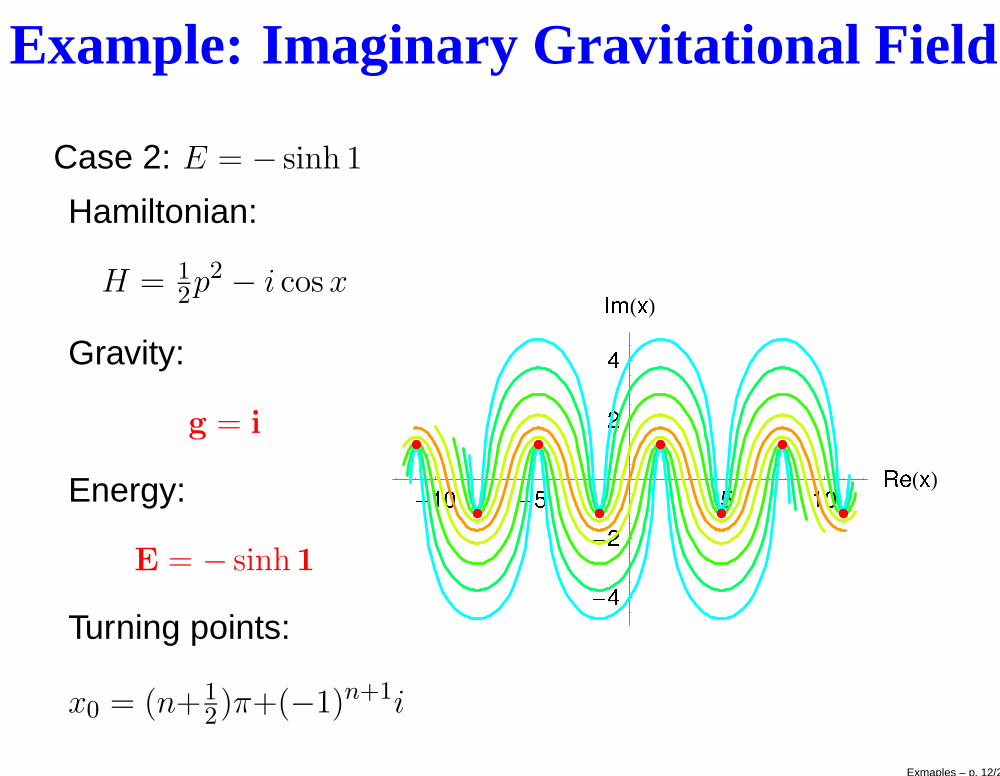
Example: Imaginary Gravitational Field
Case 2: E = − sinh 1
Hamiltonian:
H = 1
2p2 − i cos x
Gravity:
g = i
Energy:
E = − sinh1
Turning points:
x0 = (n+1
2)π+(−1)n+1i
Exmaples – p. 12/22
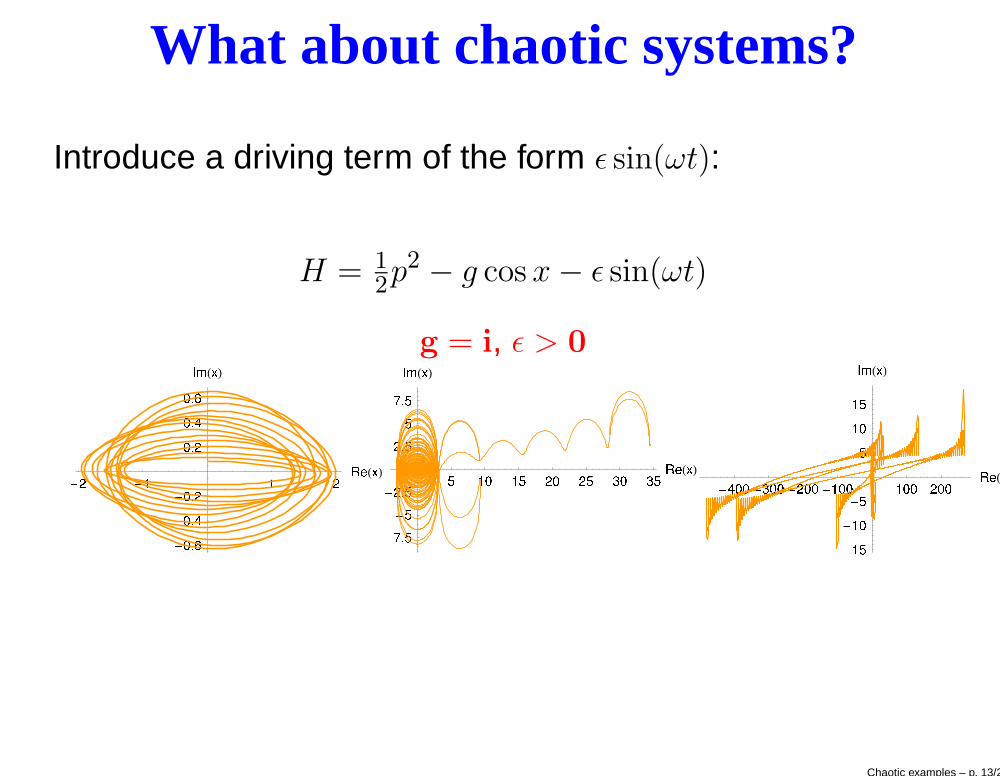
What about chaotic systems?
Introduce a driving term of the form ǫ sin(ωt):
H = 1
2p2 − g cos x − ǫ sin(ωt)
g = i, ǫ > 0
Chaotic examples – p. 13/22
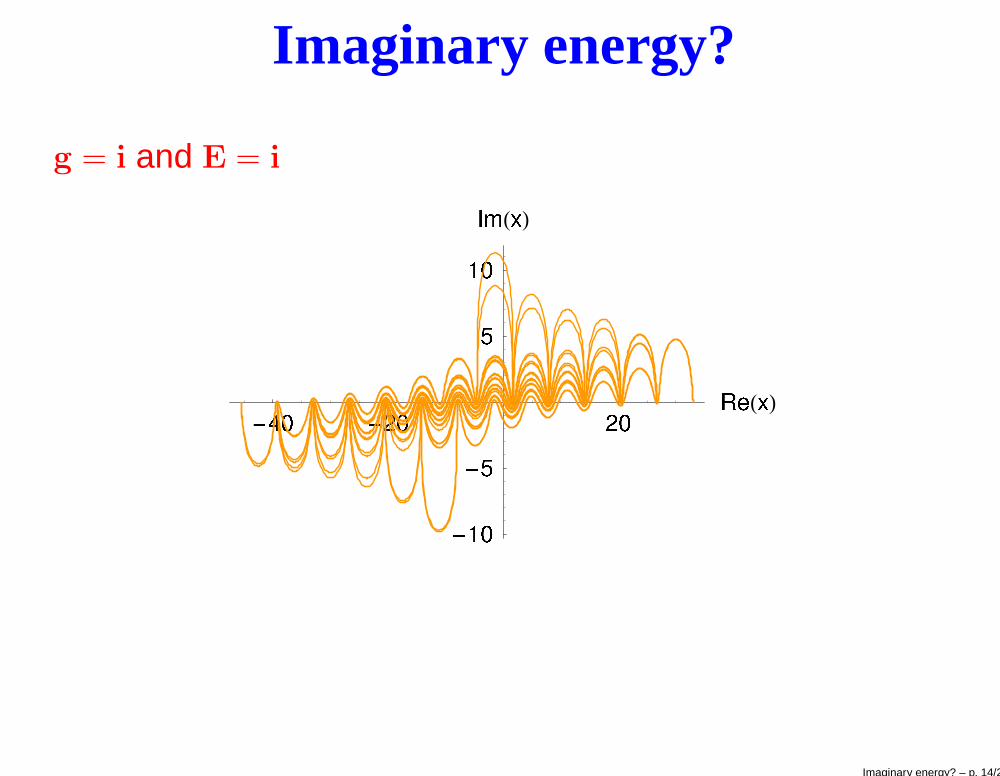
Imaginary energy?
g = i and E = i
Imaginary energy? – p. 14/22
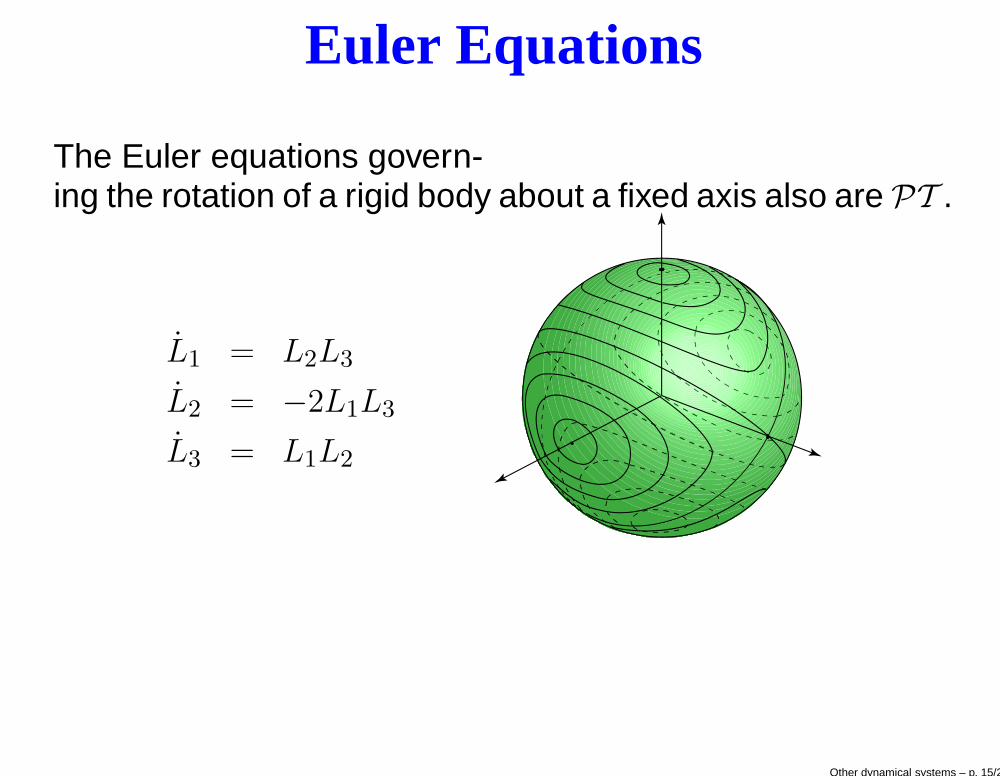
Euler Equations
The Euler equations govern-ing the rotation of a rigid body about a fixed axis also are PT .
L1 = L2L3
L2 = −2L1L3
L3 = L1L2
Other dynamical systems – p. 15/22
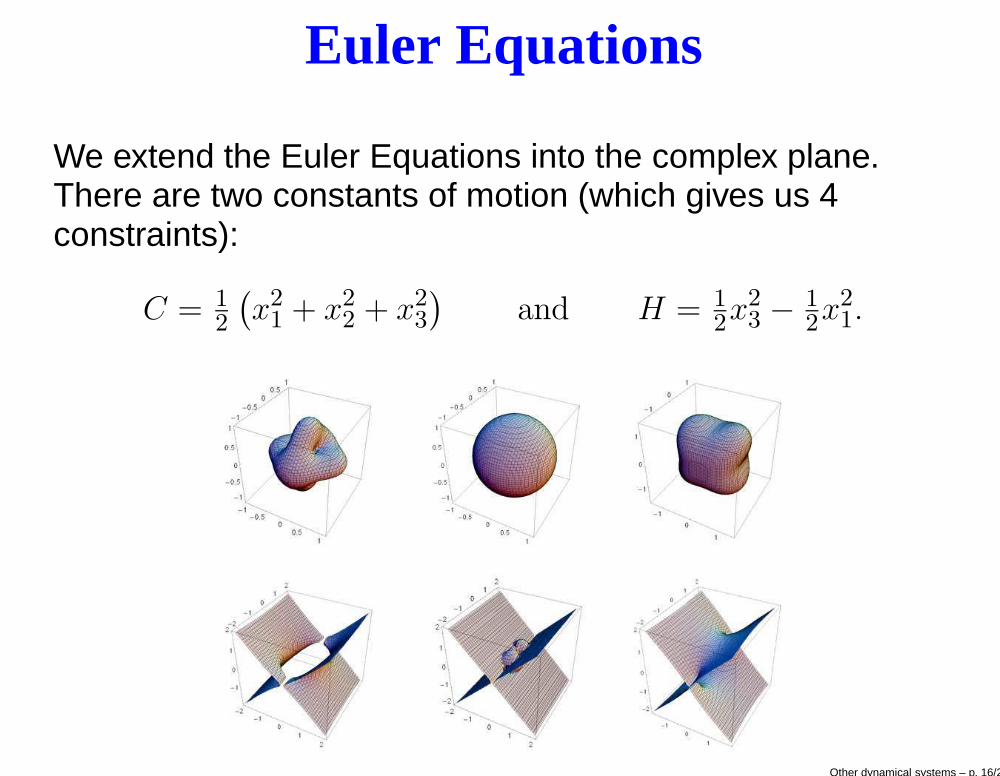
Euler Equations
We extend the Euler Equations into the complex plane.There are two constants of motion (which gives us 4constraints):
C = 1
2
(
x21 + x2
2 + x23
)
and H = 1
2x2
3 − 1
2x2
1.
Other dynamical systems – p. 16/22
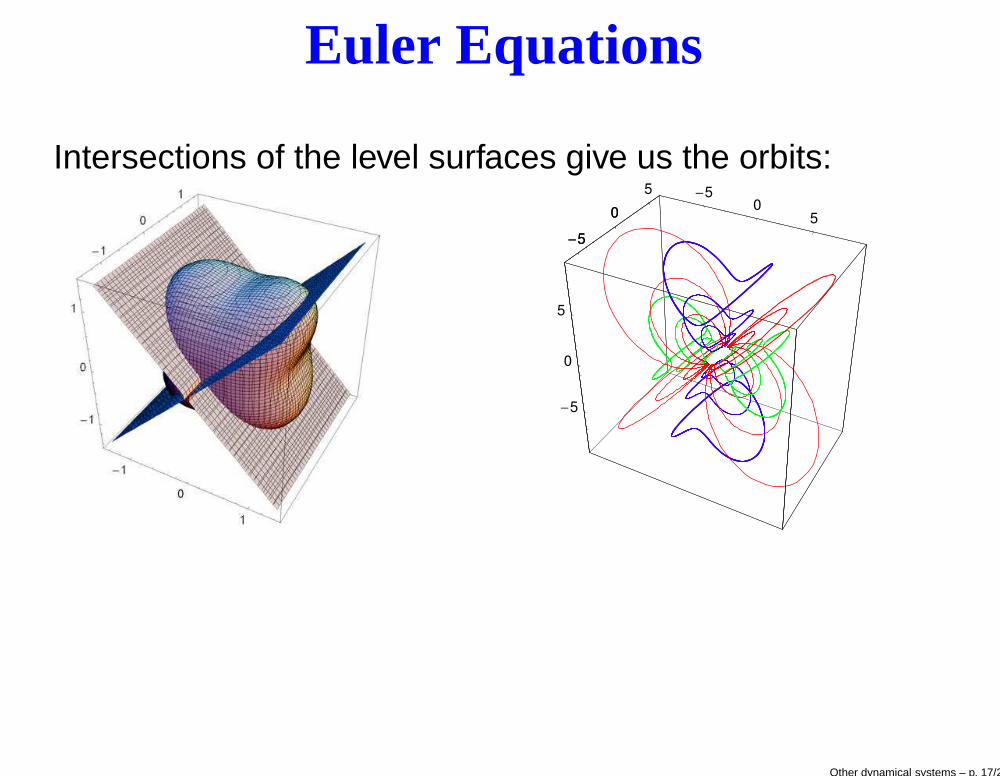
Euler Equations
Intersections of the level surfaces give us the orbits:-5
05
-5
0
5
-5
0
5
-5
0
5
Other dynamical systems – p. 17/22
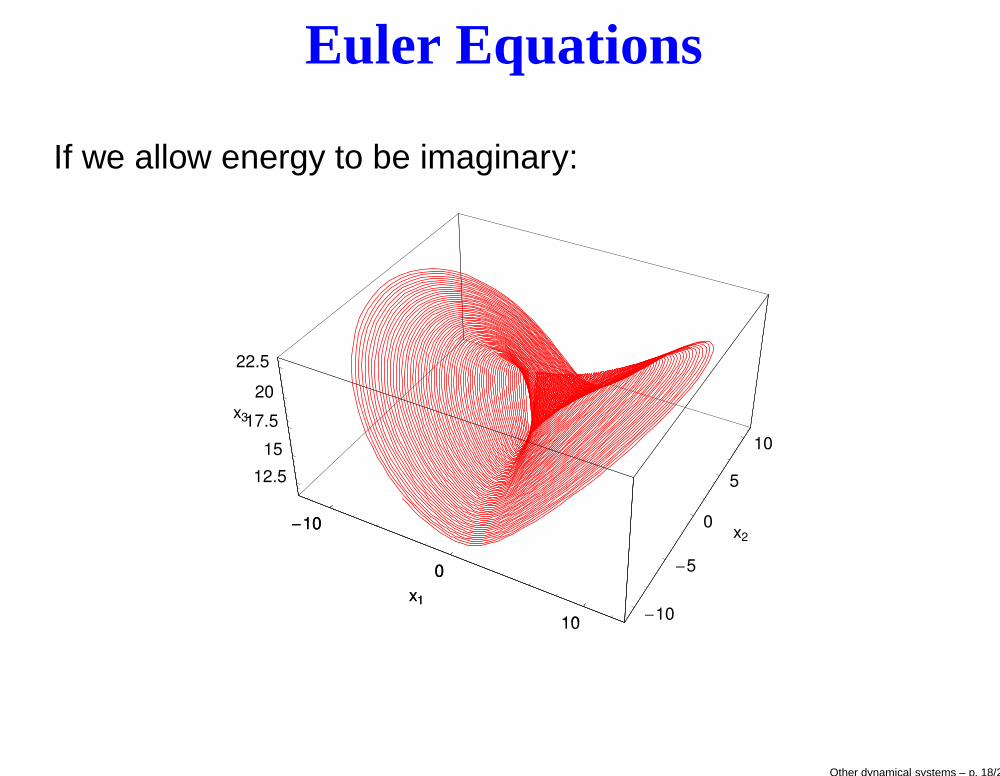
Euler Equations
If we allow energy to be imaginary:
-10
0
10
x1
-10
-5
0
5
10
x2
12.5
15
17.5
20
22.5
x3
-10
0
10
x1
Other dynamical systems – p. 18/22
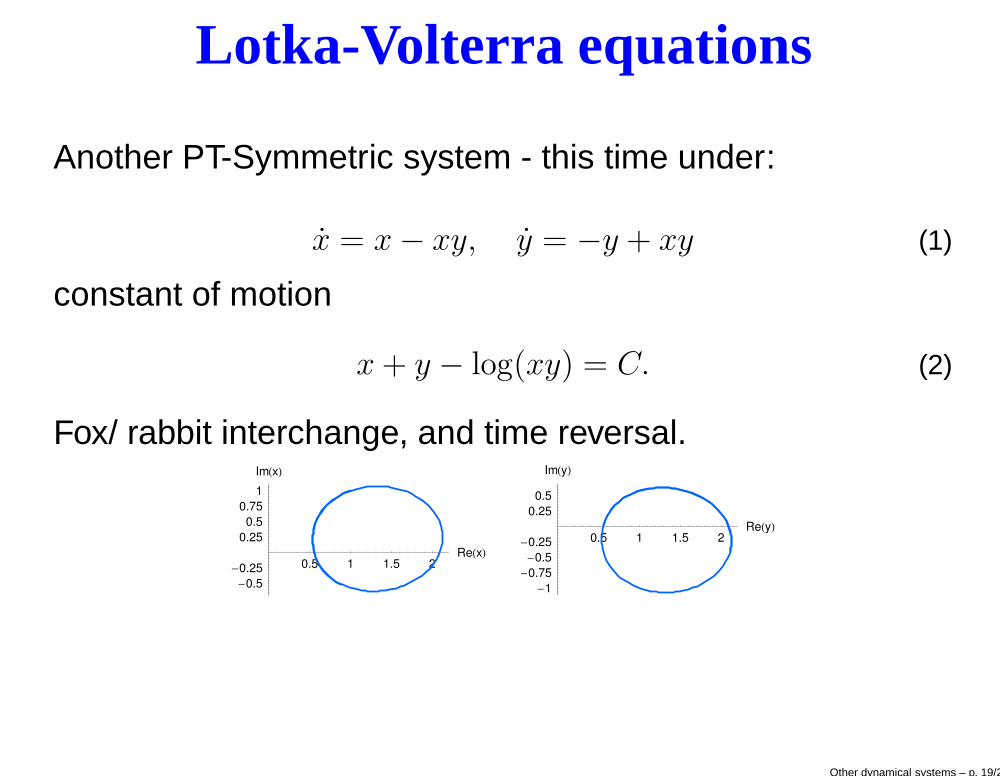
Lotka-Volterra equations
Another PT-Symmetric system - this time under:
x = x − xy, y = −y + xy (1)
constant of motion
x + y − log(xy) = C. (2)
Fox/ rabbit interchange, and time reversal.
0.5 1 1.5 2ReHxL
-0.5
-0.25
0.25
0.5
0.75
1
ImHxL
0.5 1 1.5 2ReHyL
-1
-0.75
-0.5
-0.25
0.25
0.5
ImHyL
Other dynamical systems – p. 19/22
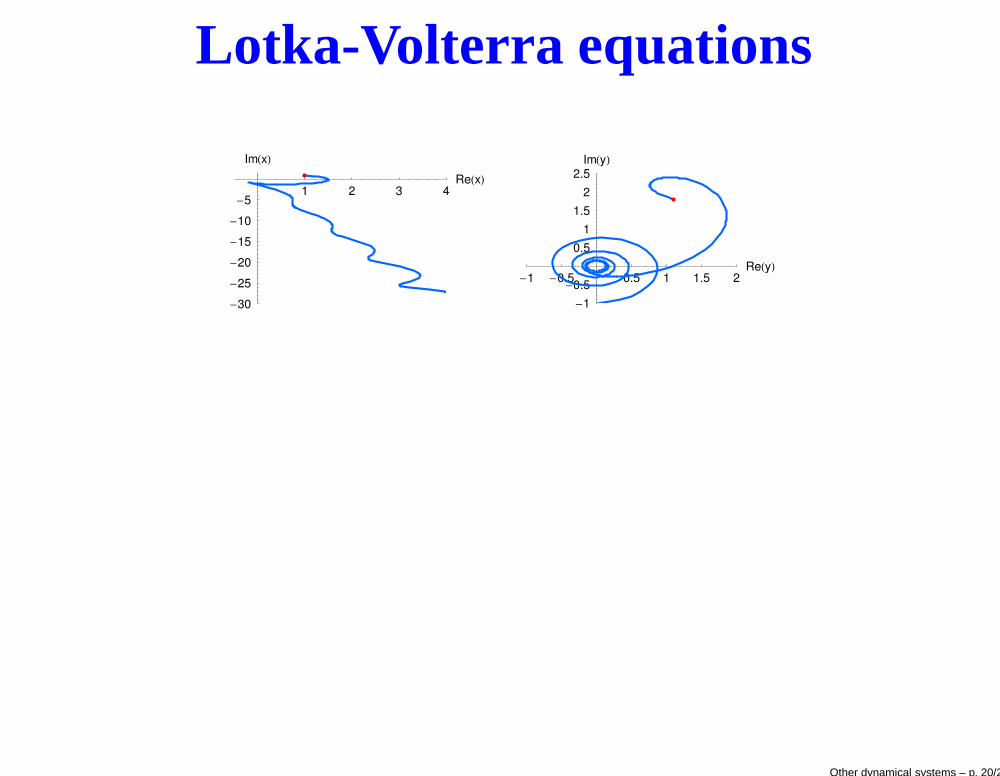
Lotka-Volterra equations
1 2 3 4ReHxL
-30
-25
-20
-15
-10
-5
ImHxL
-1 -0.5 0.5 1 1.5 2ReHyL
-1
-0.5
0.5
1
1.5
2
2.5ImHyL
Other dynamical systems – p. 20/22
Conclusions
Classical Mechanics seems to naturally extend into thecomplex plane to give some familiar and not so familiarresults
Complex extensions of classical mechanics help usunderstand well known systems
Conclusions – p. 21/22
Where next?
spherical pendulum, the spinning top
other discrete dynamical systems - SIR models etc.
classification of chaotic systems using PT Symmetry(see for example, the Kicked Rotor).
Where next? – p. 22/22





























