Embed Size (px)
Citation preview
Complexity of Classical Planning
Megan SmithLehigh UniversityCSE 497, Spring 2007

Outline
Review Classical Planning Complexity Background Computational Complexity Main Results

Review: Classical Representation
Function-free first-order language L Statement of a classical planning problem: P = (s0, g, O) s0: initial state - a set of ground atoms of L g: goal formula - a set of literals Operator: (name, preconditions, effects)
Classical planning problem: P = (,s0,Sg)
Dana Nau: Lecture slides for Automated PlanningLicensed under the Creative Commons Attribution-NonCommercial-ShareAlike License: http://creativecommons.org/licenses/by-nc-sa/2.0/

Review: Set-Theoretic Representation
Like classical representation, but restricted to propositional logic
State: a set of propositions - these correspond to ground atoms
{on-c1-pallet, on-c1-r1, on-c1-c2, …, at-r1-l1, at-r1-l2, …} No operators, just actions
take-crane1-loc1-c3-c1-p1precond: belong-crane1-loc1, attached-p1-loc1,
empty-crane1, top-c3-p1, on-c3-c1delete: empty-crane1, in-c3-p1, top-c3-p1, on-c3-p1add: holding-crane1-c3, top-c1-p1
Weaker representational power than classical representation Problem statement can be exponentially larger
Dana Nau: Lecture slides for Automated PlanningLicensed under the Creative Commons Attribution-NonCommercial-ShareAlike License: http://creativecommons.org/licenses/by-nc-sa/2.0/

Review: State-Variable Representation
A state variable is like a record structure in a computer program Instead of on(c1,c2) we might write cpos(c1)=c2
Equivalent power to classical representation Each representation requires a similar amount of
space Each can be translated into the other in low-order
polynomial time Classical representation is more popular, mainly
for historical reasons In many cases, state-variable representation is more
convenient
Dana Nau: Lecture slides for Automated PlanningLicensed under the Creative Commons Attribution-NonCommercial-ShareAlike License: http://creativecommons.org/licenses/by-nc-sa/2.0/
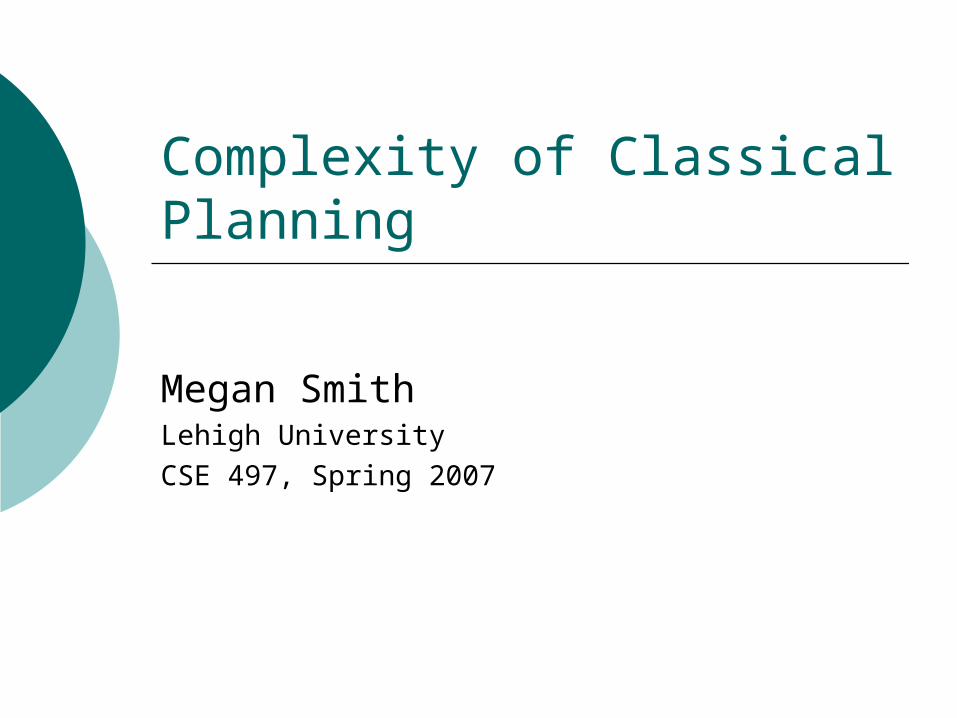
Review: State-Variable Representation (cont…)
Dana Nau: Lecture slides for Automated PlanningLicensed under the Creative Commons Attribution-NonCommercial-ShareAlike License: http://creativecommons.org/licenses/by-nc-sa/2.0/
Load and unload operators:

Decidability
Decidable An algorithm can be written that will
return “yes” if the problem is solvable and “no” if it is not
Semidecidable An algorithm can be written that will
return “yes” if the problem is solvable but will not return if it is not
Undecidable Neither decidable nor semidecidable

Language Recognition Problems
Utilized in complexity analyses Definitions:
L – finite set of characters L* - set of all possible strings of
characters in Lℒ - a language, given L and L*, ℒ may
be any subset of L*

Language Recognition Problems
Recognition procedure for ℒ : computational procedure p such that
for every s ∈ L*, p(s) returns yes if s ∈ ℒ and p(s) does not return yes if s ∉ ℒ
may return “no” or not at all

Language Recognition Problems (LR)
Worst case running time:Tmax(p,n,ℒ) = max{T(p,s)|s ∈ ℒ and |s| = n}
Worst case running space:Smax(p,n,ℒ) = max{S(p,s)|s ∈ ℒ and |s| = n}
reduction of ℒ1 to ℒ2: deterministic procedure r: ℒ1*→ ℒ2*
such that s ∈ ℒ1 iff r(s) ∈ ℒ2

Complexity Classes
Time P NP EXPTIME NEXPTIME
Space NLOGSPACE PSPACE EXPSPACE

Bounded by Time
P – Set of all languages ℒ such that ℒ has a deterministic recognition procedure whose worst-case running time is polynomially bounded

Bounded by Time
NP – Set of all languages ℒ such that ℒ has a nondeterministic recognition procedure whose worst-case running time is polynomially bounded
Examples: Boolean-SAT, knapsack problem, clique problem, vertex cover problem, etc.

Bounded by Time
EXPTIME – Set of all languages ℒ such that ℒ has a deterministic recognition procedure whose worst-case running time is exponentially bounded
Bounded by Space
NLOGSPACE - Set of all languages ℒ such that ℒ has a nondeterministic recognition procedure whose worst-case space requirement is logarithmically bounded

Bounded by Space
PSPACE - Set of all languages ℒ such that ℒ has a recognition procedure whose worst-case space requirement is polynomially bounded

Bounded by Space
EXPSPACE - Set of all languages ℒ such that ℒ has a recognition procedure whose worst-case space requirement is exponentially bounded

Complexity Classes
Given a complexity class C and a language ℒ ℒ is C-hard if every language in C is
reducible to ℒ in polynomial time ℒ is C-complete if ℒ is C-hard and ℒ ∈ C
Some sets known to be unequal Unknown whether all are unequal P = NP anyone?
NLOGSPACE ⊆ P ⊆ NP ⊆ PSPACE ⊆ EXPTIME ⊆ NEXPTIME ⊆ EXPSPACE

Planning Problems as LR Problems
PLAN-EXISTENCE – set off all strings s ⊆ L* such that s is the statement of a solvable problem
Also known as PLANSAT

Planning Problems as LR Problems
PLAN-LENGTH – set of all strings of the form (s,k) such that s is the statement of a solvable planning problem, k is a nonnegative integer, and s has a solution plan that contains no more than k actions

Decidability Results
For classical, set-theoretic, & state-variable planning, PLAN-EXISTENCE is decidable
If we extend classical or state-variable planning to allow terms to contain function symbols, PLAN-LENGTH is still decidable
If we extend classical or state-variable planning to allow terms to contain function symbols, PLAN-EXISTENCE is semidecidable
Allow function symbols? Decidability of PLAN-EXISTENCE
Decidability of PLAN-LENGTH
No Decidable Decidable
Yes Semidecidable Decidable

Proof of Semidecidability
Let P = (O,s0, g) O has no negative preconditions, no
negative effects, and at most one positive effect
Set of Horn clauses Hp: ∀a ∈ s0; Hp includes {true ⇒ a} Hp includes {true ⇒ g} ∀o ∈ O let precond(o) = {p1,…,pn} and
effects(o)={e}; Hp includes {e ⇒ p1,…,pn}
P has solution plan iff Hp is consistent
SEMIDECIDABLE!

EXPSPACE Turing Machine
Turing Machine M = (K,∑,Γ,δ,q0,F) K = {q0,…, qm} is a finite set of states F ⊆ K is set of final states Γ is finite set of allowable symbols ∑ ⊆ Γ is the set of allowable input symbols q0 ∈ K is the start state δ is a mapping from K × Γ to K × Γ × {Left,Right}
Given a Turing Machine M that uses at most an exponential number of tape cells in terms of the length of its input and an input string x, does M accept the string x?
……


Complexity Results
No restrictions, the size of any state is at most exponential: PLAN-EXISTENCE is in EXPSPACE
No negative effects: PLAN-EXISTENCE is reduced to NEXPTIME
No negative effects & no negative preconditions (ordering now doesn’t matter) PLAN-EXISTENCE is now reduced to EXPTIME
NLOGSPACE ⊆ P ⊆ NP ⊆ PSPACE ⊆ EXPTIME ⊆ NEXPTIME ⊆ EXPSPACE

Complexity Results (cont…)
Even with both these restrictions, PLAN-LENGTH remains NEXPTIME
If each operator has at most one precondition: Both PLAN-EXISTENCE & PLAN-LENGTH
are now in PSPACE Restricting all atoms to be ground
lowers complexity by one level
NLOGSPACE ⊆ P ⊆ NP ⊆ PSPACE ⊆ EXPTIME ⊆ NEXPTIME ⊆ EXPSPACE

Complexity Results (cont…)
If the operator set is fixed in advance: classical planning is at most in PSPACE
NLOGSPACE ⊆ P ⊆ NP ⊆ PSPACE ⊆ EXPTIME ⊆ NEXPTIME ⊆ EXPSPACE

Interesting Properties
Extending planning operators to allow conditional effects doesn’t affect these complexity results
In most cases, the complexity of PLAN-EXISTENCE in classical planning is one level harder than in set-theoretic planning
NLOGSPACE ⊆ P ⊆ NP ⊆ PSPACE ⊆ EXPTIME ⊆ NEXPTIME ⊆ EXPSPACE

Interesting Properties (cont…)
If negative effects are allowed, PLAN-EXISTENCE is EXPSPACE-complete but PLAN-LENGTH is only NEXPTIME-complete
PLAN-LENGTH has same complexity regardless of allowing/disallowing negated preconditions
Negative effects are more powerful than negative preconditions
NLOGSPACE ⊆ P ⊆ NP ⊆ PSPACE ⊆ EXPTIME ⊆ NEXPTIME ⊆ EXPSPACE

Dana Nau: Lecture slides for Automated PlanningLicensed under the Creative Commons Attribution-NonCommercial-ShareAlike License: http://creativecommons.org/licenses/by-nc-sa/2.0/
STRIPS Review π the empty plan do a modified backward search from g
instead of -1(s,a), each new set of subgoals is just precond(a)
whenever you find an action that’s executable in the current state, then go forward on the current search path as far as possible, executing actions and appending them to π
repeat until all goals are satisfied
g
g1
g2
g3
a1
a2
a3
g4
g5
g3
a4
a5
current search path
a6
π = a6, a4s = ((s0,a6),a4)
g6
a3
satisfied in s0

Propositional STRIPS Planning
Initial state is finite set of ground atomic formuals
Preconditions & postconditions of an operator are ground literals
Goals are ground literals Operators don’t have any variables
or indirect side effects

Extended Propositional STRIPS Planning
Augments propositional STRIPS planning with a “domain theory” domain theory = set of ground
formulas infers additional effects requires preference ordering of all
literals to avoid ambiguity

References
Automated Planning, Theory and Practice, Chapter 3
Tom Bylander The Computational Complexity of Propositional STRIPS Planning, in: Artificial Intelligence, 1994