Embed Size (px)
Citation preview
Complexity of linear programming: outline
I Assessing computational e�ciency of algorithms
I Computational e�ciency of the Simplex method
I Ellipsoid algorithm for LP and its computational e�ciency
IOE 610: LP II, Fall 2013 Complexity of linear programming Page 139
Problem, instance, algorithm
I “Linear Programming in inequality form” is a problem;I An instance of this problem is given by d = (A,b, c)
Definition 8.1An instance of an optimization problem consists of a feasible set Fand a cost function c : F ! <. An optimization problem is definedas a collection of instances.
I An algorithm is a finite set of instructions, such as arithmeticoperators, conditional statements, read and write statements,etc., and the running time of the algorithm is the totalnumber of steps involved in carrying out these instructionsuntil termination is reached
I Algorithms are described for problems, but then applied toindividual instances.
I An algorithm solves the problem if it terminates in finite timeand produces a correct answer for all instances of the problem.
IOE 610: LP II, Fall 2013 Complexity of linear programming Page 140

Algorithms for Solving (Optimization) Problems
I It is reasonable to expect the running time of an algorithm todepend on the size of the instance to which it is applied.
Definition 8.2The size of an instance is defined as the number of bits used todescribe the instance, according to a prespecified format.
.... geared towards binary computation and integer input dataI r 2 Z, |r | U: need blog2 Uc+ 2 bits (binary representation)
r = ak
2k+ak�12
k�1+· · ·+a1w1+a02
0, ai
2 {0, 1} 8i , k blog2 Uc
I An LP instance with d 2 Zmn+m+n, max{|aij
|, |bi
|, |cj
|} = U:the size of d is O(mn log2 U)
IOE 610: LP II, Fall 2013 Complexity of linear programming Page 141
Computational e�ciency analysis of algorithms
Question: Given an algorithm that solves our problem and aninstance of our problem of a particular size, how long will thealgorithm take to solve it? Two types of answers:
I Average performance on a typical problem instanceI Mathematically di�cult to define or analyze rigorouslyI Observations from empirical experience give some hints
I Worst case performance: how long for the most di�cult (forthis algorithm) instance of the given size?
I Often too pessimistic to predict practical behaviorI Relatively easy to define and analyze rigorouslyI Provides a worst-case guaranteeI Important for the theory of complexity: Suggests where the
limits of our computational abilities are
IOE 610: LP II, Fall 2013 Complexity of linear programming Page 142
Worst-case analysis and e�cient algorithms
I We will be looking at T (S): the worst-case running time ofthe algorithm on instances of the size (at most) S .
I As before, we will use the arithmetic model of computation,and count the number of arithmetic operations to estimateT (S)
I The algorithm is usually considered e�cient if T (S) can bebounded above by a polynomial function
Definition 8.3An algorithm runs in polynomial time (poly-time) if 9k 2 Z suchthat T (S) = O(Sk).
IOE 610: LP II, Fall 2013 Complexity of linear programming Page 143
How can we measure the running time of an algorithm?
I Arithmetic model of computation: each operation (includingarithmetic operations) takes unit time. (Easy to analyze.)
I Bit model of computation: each operation is decomposed intobit operations, and it’s these elementary operations that areassumed to take unit time (for example, adding two numberstakes longer if the numbers are large). (Better estimate of thetrue running time)
I Fact SupposeI an algorithm takes poly-time under the arithmetic model, andI on instances of size S , any integer produced in the course of
the algorithm execution has size bounded by a polynomial in S .
Then the algorithm runs in polynomial time under the bitmodel.
IOE 610: LP II, Fall 2013 Complexity of linear programming Page 144

Computational e�ciency of simplex method
I An LP instance in n variables with m constraints
min cTx s.t. Ax � b
I We have shown that each iteration takes polynomial time(O(mn) with revised implementation)
I Total number of iterations?I On problems arising in practice simplex method is usually
extremely fastI Conventional wisdom suggests that number of iterations in
practice is about 3m
I Worst case — number of iterations exponential in n (Klee andMinty, 1972)
IOE 610: LP II, Fall 2013 Complexity of linear programming Page 145
Klee-Minty example
maxn
X
j=1
2n�jxj
s.t. 2i�1X
j=1
2i�jxj
+ xi
100i�1, i = 1, . . . , n
xj
� 0, j = 1, . . . , n
For n = 3:
max 4x1 + 2x2 + x3s.t. x1 1
4x1 + x2 1008x1 + 4x2 + x3 10000
x1, x2, x3 � 0
IOE 610: LP II, Fall 2013 Complexity of linear programming Page 146
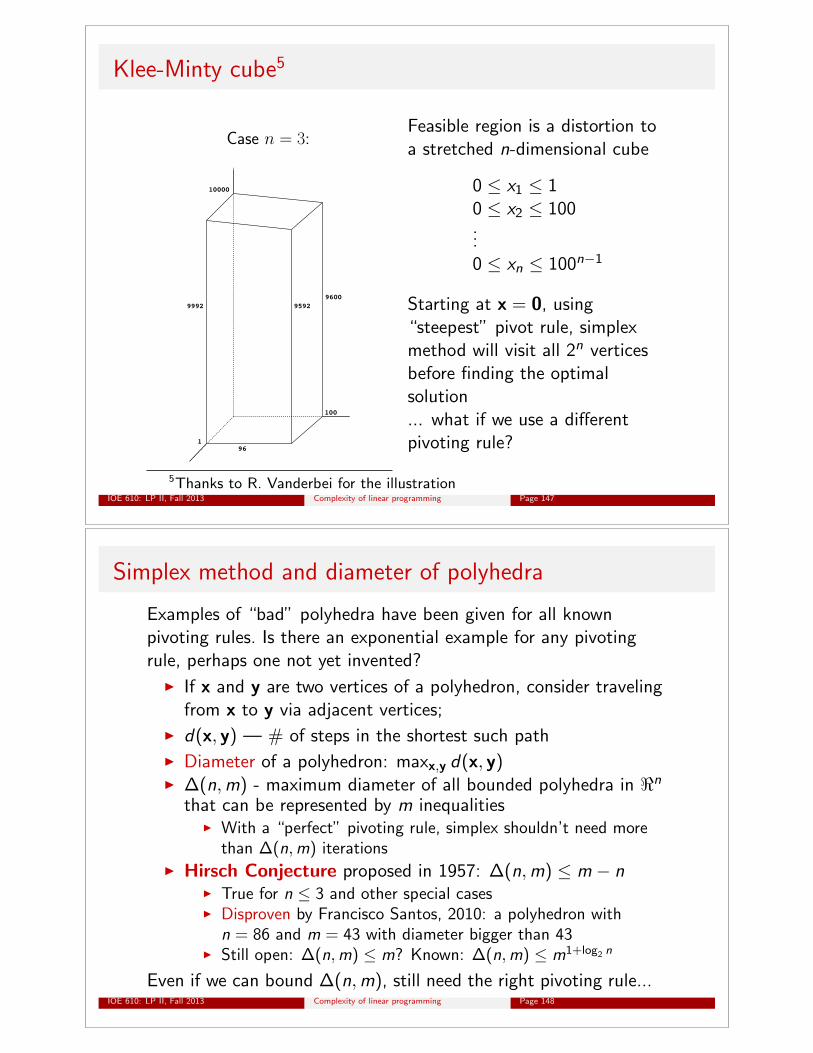
Klee-Minty cube5A Distorted Cube
Constraints represent a “minor” dis-tortion to an n-dimensional hyper-cube:
0 x1 10 x2 100
...0 xn 100n�1.
Case n = 3:
1
100
10000
96
9992 95929600
Feasible region is a distortion toa stretched n-dimensional cube
0 x1 10 x2 100...0 x
n
100n�1
Starting at x = 0, using“steepest” pivot rule, simplexmethod will visit all 2n verticesbefore finding the optimalsolution... what if we use a di↵erentpivoting rule?
5Thanks to R. Vanderbei for the illustrationIOE 610: LP II, Fall 2013 Complexity of linear programming Page 147
Simplex method and diameter of polyhedra
Examples of “bad” polyhedra have been given for all knownpivoting rules. Is there an exponential example for any pivotingrule, perhaps one not yet invented?
I If x and y are two vertices of a polyhedron, consider travelingfrom x to y via adjacent vertices;
I d(x, y) — # of steps in the shortest such pathI Diameter of a polyhedron: maxx,y d(x, y)I �(n,m) - maximum diameter of all bounded polyhedra in <n
that can be represented by m inequalitiesI With a “perfect” pivoting rule, simplex shouldn’t need more
than �(n,m) iterationsI Hirsch Conjecture proposed in 1957: �(n,m) m � n
I True for n 3 and other special casesI Disproven by Francisco Santos, 2010: a polyhedron with
n = 86 and m = 43 with diameter bigger than 43I Still open: �(n,m) m? Known: �(n,m) m1+log2 n
Even if we can bound �(n,m), still need the right pivoting rule...IOE 610: LP II, Fall 2013 Complexity of linear programming Page 148
Some LP history
I 1930’s — 1940’sI (Specialized) LP models and solution approaches developed
independently in the Soviet Union and the West for a varietyof optimal resource allocation and planning applications
I Late 1940’sI General LP theory (John Von Neumann) and solution method
(Simplex algorithm, George Dantzig) developed in USI Simplex runs quite fast in practice; LP used for military
operations and gains widespread use after the war
I 1972I Klee and Minty show that the simplex algorithm is not
e�cient, i.e., it does not run in polynomial time
I 1975: Nobel Prize in Economics is awarded for “for theircontributions to the theory of optimum allocation ofresources” via LP to Leonid V. Kantorovich and Tjalling C.Koopmans
IOE 610: LP II, Fall 2013 Complexity of linear programming Page 149
LP history, continued
I 1970’sI THE BIG QUESTION: Does there exist an algorithm for
solving LPs that’s poly-time in the worst case?
I 1979, in the Soviet Union...I Leonid G. Khachiyan: YES, THERE IS — the Ellipsoid
algorithm!I NY Times publishes several articles about this discovery;
makes some mathematical blunders about the implications ofthe result and has to print retractions
IOE 610: LP II, Fall 2013 Complexity of linear programming Page 150
Ellipsoid Algorithm for LP: outline
I Develop general ideas for the Ellipsoid algorithm
I Specify the algorithm for finding a point inP = {x 2 <n : Ax � b}
I Modify the algorithm for solving min cTx s.t. Ax � b
IOE 610: LP II, Fall 2013 Ellipsoid algorithm Page 151
Volumes and A�ne Transformations
DefinitionIf L ⇢ <n, the volume of L is
Vol(L) =
Z
x2Ldx
Definition 8.6
If D 2 <n⇥n is nonsingular and b 2 <n, the mappingS(x) = Dx+ b is an a�ne transformation.
I Note: by definition, a�ne transformation is invertible
Lemma 8.1Let L ⇢ <n. If S(x) = Dx+ b then Vol(S(L)) = | det(D)| · Vol(L).
IOE 610: LP II, Fall 2013 Ellipsoid algorithm Page 152
Assumptions for Ellipsoid Algorithm
Goal of the algorithm: find a point in a suitably described convexset P ⇢ <n.Assumptions:
I P is bounded: 9B(x0, r) ◆ P . Let V � Vol(B(x0, r)).I P is full-dimensional, i.e., has positive volume (Definition
8.7)I Let Vol(P) > v > 0.
I P can be described via a separation oracle: given a vectory 2 <n, the oracle either reports that y 2 P , or finds aseparating hyperplane: a 2 <n such that aT y < aT x 8x 2 P .
IOE 610: LP II, Fall 2013 Ellipsoid algorithm Page 153
Positive definite matrices and Ellipsoids
Definition 8.4
Let Q be an n ⇥ n symmetric matrix, i.e., QT = Q. Q is calledpositive definite (notation: Q � 0) if xTQx > 0 8x 6= 0.
I Symmetric: Q 2 Sn; symmetric PD: Q 2 Sn
+ or Q � 0
I Q 2 Sn has n eigenvalues �1, . . . , �n
; det(Q) =Q
n
i=1 �i
I Q 2 Sn
+ i↵ � > 0
Definition 8.5A set E ⇢ <n
E = E (z ,Q) = {x : (x� z)TQ�1(x� z) 1}
where Q � 0 is an ellipsoid with center z 2 <n.
IOE 610: LP II, Fall 2013 Ellipsoid algorithm Page 154
Ellipsoids as a�ne transformations of balls
I A ball centered at z with radius r > 0:
E (z, r2I) = {x : (x� z)T (x� z) r2} = {x : kx� zk r}
I Unit ball: ball centered at 0 with radius 1:
B(0, 1) = E (0, I)
I If Q 2 Sn
+, 9Q12 2 Sn
+: Q12 ·Q
12 = Q and det(Q
12 ) =
p
det(Q)
I Note: an ellipsoid is an a�ne transformation of the unit ball:
E (z,Q) = Q12E (0, I) + z
Corollary:
Let Q � 0. Then Vol(E (z,Q)) =p
det(Q) · Vol(B(0, 1)).
IOE 610: LP II, Fall 2013 Ellipsoid algorithm Page 155
Central-cut ellipsoid algorithm: general idea
Input: Ellipsoid E0, constants V and v as above.Initialization: E0 = E (x0,Q0) ◆ P , t = 0.Iteration t: (E
t
= E (xt
,Qt
) ◆ P)
I Call the separation oracle with xt
as input.
I If xt
2 P – terminate.
I Otherwise, oracle returns a such that
P ✓ Et
\ {x : aTx � aTxt
}.
Construct ellipsoid Et+1 = E (x
t+1,Qt+1) of smaller volumecontaining the set on the right.
I Set t t + 1 and continue.
IOE 610: LP II, Fall 2013 Ellipsoid algorithm Page 156
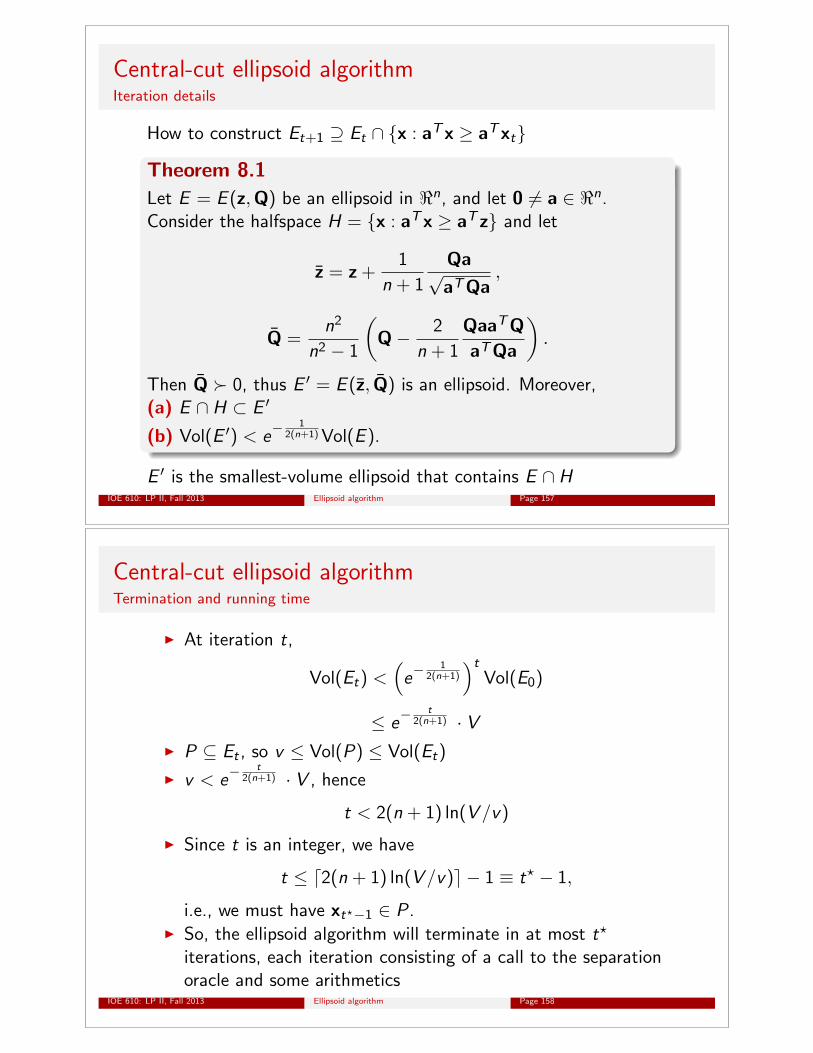
Central-cut ellipsoid algorithmIteration details
How to construct Et+1 ◆ E
t
\ {x : aTx � aTxt
}
Theorem 8.1Let E = E (z,Q) be an ellipsoid in <n, and let 0 6= a 2 <n.Consider the halfspace H = {x : aTx � aT z} and let
z = z+1
n + 1
QapaTQa
,
Q =n2
n2 � 1
✓
Q� 2
n + 1
QaaTQaTQa
◆
.
Then Q � 0, thus E 0 = E (z, Q) is an ellipsoid. Moreover,(a) E \ H ⇢ E 0
(b) Vol(E 0) < e�1
2(n+1)Vol(E ).
E 0 is the smallest-volume ellipsoid that contains E \ HIOE 610: LP II, Fall 2013 Ellipsoid algorithm Page 157
Central-cut ellipsoid algorithmTermination and running time
I At iteration t,
Vol(Et
) <⇣
e�1
2(n+1)
⌘
t
Vol(E0)
e�t
2(n+1) · VI P ✓ E
t
, so v Vol(P) Vol(Et
)
I v < e�t
2(n+1) · V , hence
t < 2(n + 1) ln(V /v)
I Since t is an integer, we have
t d2(n + 1) ln(V /v)e � 1 ⌘ t? � 1,
i.e., we must have xt
?�1 2 P .I So, the ellipsoid algorithm will terminate in at most t?
iterations, each iteration consisting of a call to the separationoracle and some arithmetics
IOE 610: LP II, Fall 2013 Ellipsoid algorithm Page 158

Ellipsoid algorithm for linear inequalities
P = {x 2 <n : Ax � b}
Goal: find out whether P = ;.I Assume P is bounded and either empty or full-dimensional.
Also, presume E0, v and V are known.I Separation oracle: for given y 2 <n, check if
aTi
y � bi
, i = 1, . . . ,mI If all constraints satisfied, y 2 PI If ith constraint is violated, aT
i
x � aTi
y is a separatinghyperplane
The oracle requires O(mn) arithmetic operations
I We assume for now calculations are made in infinite precisionand taking a square root takes the same time as any otherarithmetic operation
IOE 610: LP II, Fall 2013 Ellipsoid algorithm Page 159
Central-cut ellipsoid algorithm for linear inequalities
Input: Ellipsoid E0, constants V and v as above.Initialization: E0 = E (x0,Q0) ◆ P , t = 0. Lett? = d2(n + 1) ln(V /v)e.Iteration t: (E
t
= E (xt
,Qt
) ◆ P)
I If t = t?, stop; P = ;.I If x
t
2 P , stop; P 6= ;.I Otherwise, find a violated constraint: aT
i
xt
< bi
. Constructellipsoid
Et+1 = E (x
t+1,Qt+1) � Et
\ {x : aTi
x � aTi
xt
}
(use Thm. 8.1).
I Set t t + 1 and continue.
IOE 610: LP II, Fall 2013 Ellipsoid algorithm Page 160

Assumptions revisited: V
Lemma 8.2 (modified)
Let A 2 Zm⇥n, and b 2 <m. Let U = max{|aij
|, |bi
|}.(a) Every basic solution of {x : Ax � b} satisfies
�(nU)n xj
(nU)n, j = 1, . . . , n
(b) Every basic solution of P = {x : Ax = b, x � 0} satisfies
�(mU)m xj
(mU)m, j = 1, . . . , n
Proof of (a):I Basic solution is A�1b, where A 2 <n⇥n is a submatrix of A
and b 2 <n is a subvector of b.I Cramer’s rule gives a formula of each component x
j
If rows of A span <n, P 6= ; i↵ it has extreme points, all of whichare contained in
E0 = E (0, n(nU)2nI ), Vol(E0) < V = (2n)n(nU)n2
IOE 610: LP II, Fall 2013 Ellipsoid algorithm Page 161
Assumptions revisited: v
Lemma 8.4Let P = {x : Ax � b} be full-dimensional and bounded. Assume Aand b have integer entries of magnitude at most U. ThenVol(P) � n�n(nU)�n
2(n+1)
Idea of the proof:
I P is the convex hull of its extreme points
I If P 2 <n is full-dimensional, it has n + 1 extreme points thatdo not belong to a common hyperplane
I Vol(P) � volume of convex hull of these extreme points
I The latter can be bounded by bounding components ofextreme points
IOE 610: LP II, Fall 2013 Ellipsoid algorithm Page 162

Assumptions revisited: P full-dimensional
Lemma 8.3Let P = {x : Ax � b}. Assume A and b have integer entries ofmagnitude at most U. Let
✏ =1
2(n + 1)((n + 1))U)�(n+1).
Let P✏ = {x : Ax � b� ✏e}.(a) If P is empty, then P✏ is empty(b) If P is nonempty, then P✏ is full-dimensional.
IOE 610: LP II, Fall 2013 Ellipsoid algorithm Page 163
Run-time of the ellipsoid algorithm: number of iterations
P = {x : Ax � b}Assume A,b have integer components with magnitude bounded byU, rows of A span <n.Case 1: If we know that P is bounded, and either empty orfull-dimensional, take
E0 = E (0, n(nU)2nI ), v = n�n(nU)�n
2(n+1), V = (2n)n(nU)n2,
and the algorithm with these inputs will terminate inO(n4 log(nU)) iterations (Recall: instance size is O(mn logU))Case 2: If P is arbitrary,
I Construct PB
by adding bounds on variables as in Lemma 8.2I P
B
contains all extreme points of P
I Construct PB,✏ as in Lemma 8.3
I To decide if P = ;, apply EA to PB,✏; it will terminate in
O(n6 log(nU)) iterations.IOE 610: LP II, Fall 2013 Ellipsoid algorithm Page 164

Run-time of the ellipsoid algorithm: overall running time
I We showed that number of iterations is polynomial in the sizeof the problem
I To show the algorithm takes polynomial time, need to showthat the number of operations/run-time per iteration is alsopolynomial
I Issues:I Need to take square roots — cannot be done accurately in
finite-precision calculationsI Need to make sure the numbers generated have polynomial size
I These problems can be resolved by showing that computationsneed only be carried out with finite (polynomial) precision.
The result:
Theorem 8.3The LP feasibility problem with integer data can be solved inpolynomial time.
IOE 610: LP II, Fall 2013 Ellipsoid algorithm Page 165
Ellipsoid algorithm for LP optimization
(P) min cTx (D) max pTbs.t. Ax � b s.t. pTA = cT
p � 0
Option 1: Apply ellipsoid algorithm to
Q = {(x,p) : bTp = cTx, Ax � b, ATp = c, p � 0}.
Option 2: Sliding objective: start by finding x0 2 P ; for each tapply ellipsoid algorithm to
P \ {x : cTx < cTxt
}.
If the set is empty, xt
is a solution. Otherwise, we find a pointxt+1 2 P that’s better than x
t
, and continue.
IOE 610: LP II, Fall 2013 Ellipsoid algorithm Page 166

Practical implications?
I Although a great theoretical accomplishment, Ellipsoidalgorithm never became a method of choice for solving LPs inpractice
I Its observed running time ⇡ its worst-case running time...
I ...unlike the simplex method
I ...or the Interior Point (Barrier) Methods
IOE 610: LP II, Fall 2013 Ellipsoid algorithm Page 167