Embed Size (px)
Citation preview

Computational Movement Analysis
Lecture 5:
Segmentation, Popular Places and Regular
Patterns
Joachim Gudmundsson

σ
Problem
Input: x1, … , xn: moving entities in the plane
k: a positive integer r: a positive real value
An axis aligned square σ of side length r is a popular place if at least k entities visit it.
σ is a popular place for k 5

σ
Problem: Two models
Continuous model:σ is a popular place if it is intersected by polylines
from at least k different entities.
Discrete model: σ is a popular place in the discrete model if it contains
input points from at least k different entities.
T1
T2

Results
Continuous model: maximum number of visitors O(2n2)
(2n2)
Discrete model: maximum number of visitors O(n log n)
(n log n)

What should we output?
• Detect if there exists a popular place?
• Report the popular place with the maximum number of visitors?
• Report “all” popular places?
• …

Continuous model – report all

Continuous model – report all
Problem: Given a set of polygons, with holes, find a point that stabs a maximum number of polygons.

Continuous model – report all
Idea: Use a sweep-line algorithm

Continuous model – report all
Complexity: O(2)
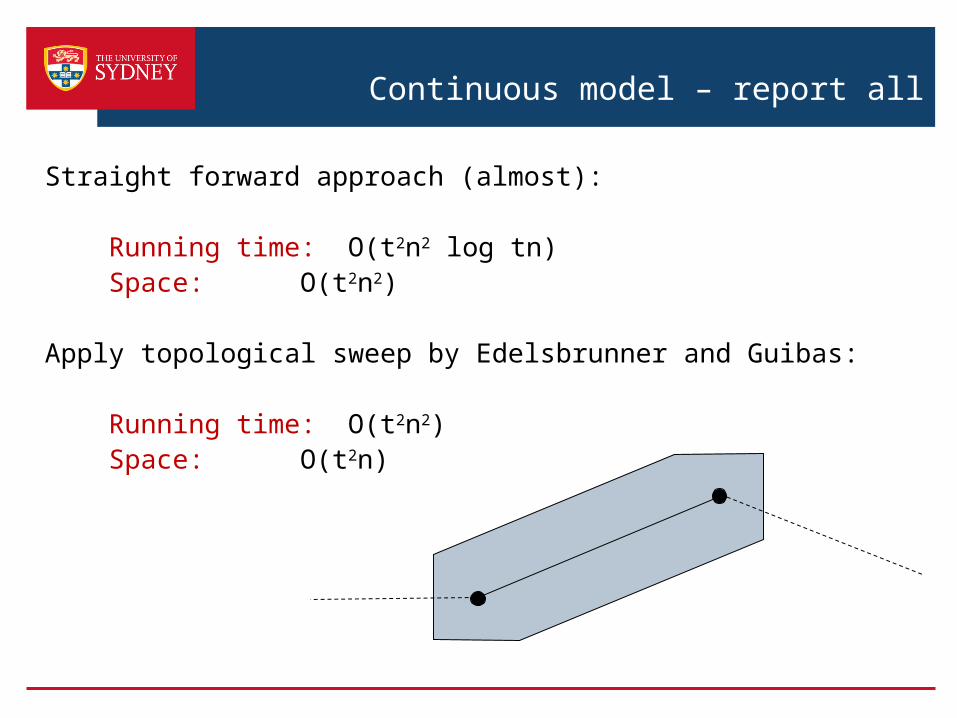
Straight forward approach (almost):
Running time: O(t2n2 log tn)Space: O(t2n2)
Apply topological sweep by Edelsbrunner and Guibas:
Running time: O(t2n2)Space: O(t2n)
Continuous model – report all

Find the maximum “colour depth” using topological sweep by Edelsbrunner & Guibas.
Continuous model – report all

Continuous model – report all
Improvement (incl. topological sweep [Edelbsbrunner & Guibas’89])
Running time: O(t2n2)
Space: O(tn)
Non-trivial to implement due to the degenerate cases.
The problem has an (2n2) lower bound.

Continuous model – report all
n=32t=1000
Time: 5 seconds
Compression + finding all popular places

Results
Discrete model: maximum number of visitors O(n log n)
(n log n)
Continuous model: maximum number of visitors O(2n2)
(2n2)

Problem
For analysis, it is often necessary to break a trajectory into pieces according to the behaviour of the entity (e.g., walking, flying, …).
Input: A trajectory T, where each point has a set of attribute values, and a set of criteria.
Attributes: speed, heading, curvature…
Criteria: bounded variance in speed, curvature, direction, distance…
Aim: Partition T into a minimum number of subtrajectories (so-called segments) such that each segment fulfils the criteria.
“Within each segment the points have similar attribute values”

Example
Trajectory T sampled with equal time intervals.

Example
Trajectory T sampled with equal time intervals.
Top right: speed cannot differ more than a factor 2

Example
Trajectory T sampled with equal time intervals.
Bottom left: direction of motion differs by at most 90◦

Example
Trajectory T sampled with equal time intervals.
Bottom right: both criteria are used in conjunction (speed and direction)

Problem
Observation:Many trajectories span over several activities.
Goal:Segment a trajectory into subtrajectories according to its behaviour.
We will only consider segmenting trajectories at vertices.

Criteria-Based Segmentation
Goal: Partition trajectory into a small number of segments such that a given criterion is fulfilled on each segment
each segment are uniform
e.g. heading angular range

Criteria-Based Segmentation
Goal: Partition trajectory into a small number of segments such that a given criterion is fulfilled on each segment
Criteria: heading, speed, location, curvature, sinuosity … and combinations of these e.g., describe movement characteristics

Greedy Algorithm
Definition: A criterion is decreasing monotone, if it holds on a segment, it holds on any subsegment.
Examples: disk criterion (location), angular range (heading), speed…
Theorem: A combination of conjunctions and disjunctions of decreasing monotone criteria is a decreasing monotone criterion.

Greedy Algorithm
Observation:If criteria are decreasing monotone, a greedy strategy works.

Greedy Algorithm
Observation:If criteria are decreasing monotone, a greedy strategy works.
For many decreasing monotone criteria Greedy requires O(n) time, e.g. for speed, heading…

Greedy Algorithm
Observation:For some criteria, iterative double & search is faster.
Double & search: An exponential search followed by a binary search.

Criteria-Based Segmentation
Boolean or linear combination of decreasing monotone criteria
Greedy Algorithm
• incremental in O(n) time or constant-update criteria e.g. bounds on speed or heading
• double & search in O(n log n) time for non-constant update criteria e.g. staying within some radius
[Buchin et al.’11]

Decreasing and Increasing Monotone Criteria
28
Observation: For a combination of decreasing and increasing monotone criteria the greedy strategy does not always work.
Example: Min duration 2 AND Max speed range 4
speed1
5

Case Study: Geese Migration
Goal: Delineate stopover sites of migratory geese
• Two behavioural types
- stopover
- migration flight
• Input:
- GPS tracks
- expert description of behaviour

Case Study: Geese Migration
Data
Spring migration tracks
- White-fronted geese
- 4-5 positions per day
- March – June
Up to 10 stopovers during spring migration
- Stopover: 48 h within radius 30 km
- Flight: change in heading <120°
Kees
Adri

Comparison
manual
computed

Evaluation
Few local differences:
Shorter stops, extra cuts in computed segmentation

stopover migration flight
Criteria
A combination of decreasing and increasing monotone criteria
Within radius 30km
At least 48hAND
Change in heading<120°
OR

Non-Monotone Segmentation
35
Many Criteria are not (decreasing) monotone:• Minimum time• Standard deviation• Fixed percentage of outliers
Example: Geese Migration
For these Aronov et al. introduced the start-stop diagram

36
Start-Stop Diagram
Algorithmic approach:
input trajectory compute start-stop diagram compute segmentation

37
Start-Stop Diagram
Given a trajectory T over time interval I = {t0,…,t} and criterion C
The start-stop diagram D is (the upper diagonal half of) the n x n grid, where each point (i,j) is associated to segment [ti,tj] with • (i,j) is in free space if C holds on
[ti,tj]• (i,j) is in forbidden space if C does
not hold on [ti,tj]
A (minimal) segmentation of T corresponds to a (min-link) staircase in D
free space
forbidden space
staircase

38
Start-Stop Diagram
A (minimal) segmentation of T corresponds to a (min-link) staircase in D.
1234567891011121 2 3 4 5 6 7 8 9 10 11 12
121110987654321
1
3
2
4
9
7
5
8
10
6
12
11

39
Start-Stop Diagram
A (minimal) segmentation of T corresponds to a (min-link) staircase in D.
1234567891011121 2 3 4 5 6 7 8 9 10 11 12
121110987654321
1
3
2
4
9
7
5
8
10
6
12
11
40
Start-Stop Diagram
1234567891011121 2 3 4 5 6 7 8 9 10 11 12
121110987654321
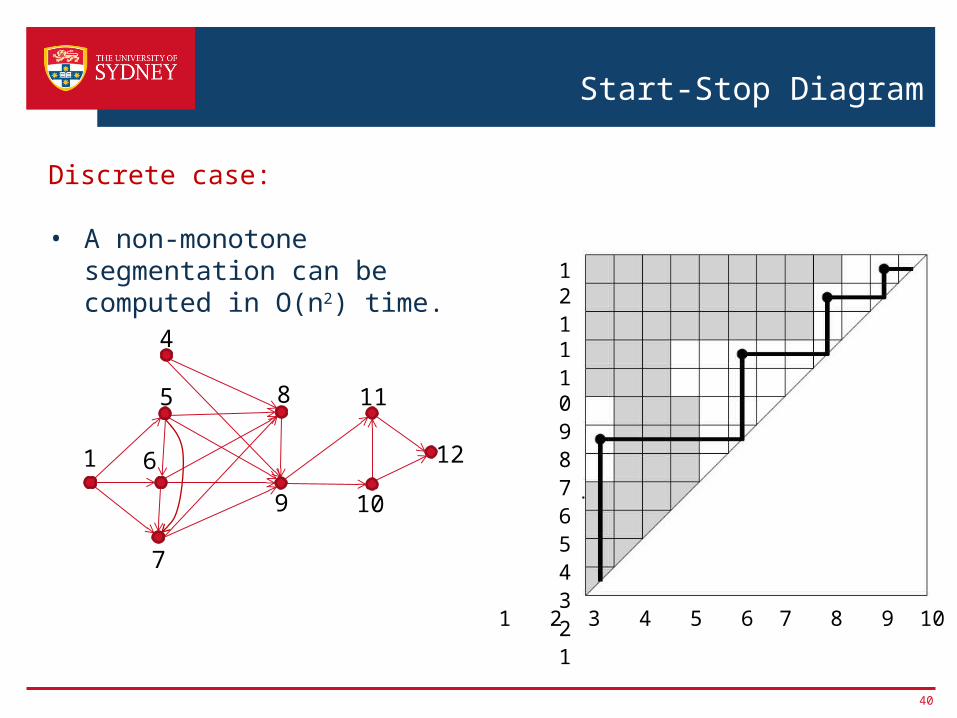
Discrete case:
• A non-monotone segmentation can be computed in O(n2) time.
1
5
4
6
8
7
9 10
11
12

41
Start-Stop Diagram
1234567891011121 2 3 4 5 6 7 8 9 10 11 12
121110987654321
Discrete case:
• A non-monotone segmentation can be computed in O(n2) time.
1
5
4
6
8
7
9 10
11
12
[Aronov et al.13]

42
Stable Criteria
Definition:A criterion is stable if and only if where = number of changes of validity on segments [0,i], [1,i], …, [i-1,i]

43
Stable Criteria
Definition:A criterion is stable if and only if where = number of changes of validity on segments [0,i], [1,i], …, [i-1,i]
Observations: Decreasing and increasing monotone criteria are stable. A conjunction or disjunction of stable criterion are stable.

Compressed Start-Stop Diagram
For stable criteria the start-stop diagram can be compressed by applying run-length encoding.
Examples:
22
increasing monotone
decreasing monotone 9

Computing the Compressed Start-Stop Diagram
For a decreasing criterion consider the algorithm:
ComputeLongestValid(crit C, traj T)
Algorithm:Move two pointers i,j from n to 0 over the trajectory. For every trajectory index j the smallest index i for which [I,j] satisfies the criterion C is stored.
22
i j
9

Computing the Compressed Start-Stop Diagram
For a decreasing criterion ComputeLongestValid(crit C, traj T):
Move two pointers i,j from n to 0over the trajectory
22
i j
Requires a data structure for segment [i,j] allowing the operations isValid, extend, and shorten, e.g., a balanced binary search tree on attribute values for range or bound criteria.
Runs in O(nc(n)) time where c(n) is the time to update & query.
Analogously for increasing criteria.
9

Computing the Compressed Start-Stop Diagram
The start-stop diagram of a conjunction (or disjunction) of two stable criteria is their intersection (or union).
The start-stop diagram of a negated criteria is its inverse.
The corresponding compressed start-stop diagrams can be computed in O(n) time.
22
9

Attributes and criteria
Examples of stable criteria
• Lower bound/Upper bound on attribute
• Angular range criterion• Disk criterion• Allow a fraction of outliers• …
22

Computing the Optimal Segmentation
Observation: The optimal segmentation for [0,i] is either one segment, or an optimal sequence of segments for [0,j<i] appended with a segment [j,i], where j is an index such [j,i] is valid.
Dynamic programming algorithm
for each row from 0 to n find white cell with min link
That is, iteratively compute a table S[0,n] where entry S[i] for row i stores last: index of last link count: number of links so far
Runs in O(n2) time 22
S
0
n

Computing the Optimal Segmentation
More efficient dynamic programming algorithm for compressed diagrams
Process blocks of white cells using a range query in a binary search tree T (instead of table S) storing index: row index last: index of last link count: number of links so far
augmented by minimal count in subtree
Runs in O(n log n) time
22
T
[Alewijnse et al.’14]

51
Summary
• Greedy algorithm for decreasing monotone criteria O(n) or O(n log n) time [Buchin, Driemel, van Kreveld, Sacristan, 2010]
• Case Study: Geese Migration [Buchin, Kruckenberg, Kölzsch, 2012]
• Start-stop diagram for arbitrary criteria O(n2) time [Aronov, Driemel, van Kreveld, Löffler, Staals, 2012]
• Compressed start-stop diagram for stable criteria O(n log n) time [Alewijnse, Buchin, Buchin, Sijben, Westenberg, 2014]

Regular visits
Given a query region, does an object (animal, vehicle, …) regularly visit the region?
Regular behaviour? Every day? Every month? Annual migration?
Regular? 75% of all Saturdays I play football. Regular?

Motivation
Time
start end
inside outside

Motivation
Time
start end
offset periodlength
Length = 5

Motivation
Time
start end
Length = 9Visit 78% of the times
offset periodlength

Motivation
Time
start end
periodoffset
periodlength

Simplest case
Time
periodoffset
periodlength
Given period offset and period length.
0 1 1 0 1 1 1 0 1 1 0
Problem: Given a bitstring S of length n and a constant 0<c<1, find the longest subsequence S’ of S such that there are at least c|S’| 1s in S’.
periodoffset

Longest Dense Substring problem
S = 100011100110
j=1
if(i) = si
Maximize b - as.t. f(b) - f(a) c(b-a)
f(i)
3
6
3 96 12
g(i) = f(i) – ci
Maximize b - as.t. g(b) - g(a) 0
g(i)
-1
0
3 96 12
1
0

Longest Dense Substring problem
S = 100011100110
g(i) = f(i) – ci
Maximize b - as.t. g(b) - g(a) 0
g(i)
-1
0
3 96 12
1
0
Maximize b - as.t. g(b) g(a)
g(b) must lie on the UREg(a) must lie on the LLE
-1
0
3 96 12
1
0
LLE
URE

Longest Dense Substring problem
Longest Dense Substring can be computed in O(n) time
Compressed case: 11100010100000011100000 3,3,1,1,1,6,3,5
size n size k
Compressed LDS can be computed in O(k) time

Given period length
Given period length, but no period offset
Time

Given period length
Time

Given period length
Time
Find the longest vertical segment A such that at least a fraction c of the horizontal segments it intersects are “inside”.
offset
A

Given period length
Theorem:Given a set of intervals I, a constant 0<c1 and a period length p the longest c-dense repetitive pattern over all offsets can be computed in O(n3/2 log2 n) time using O(n log n) space.
Time

General case
Observation:The longest pattern can be translated and scaled such that one of its “visits” coincides with the start point of an interval and one “visit” coincides the start/end point of an interval.
What if neither period offset nor period length is known? (no two consecutive visits in the “same region”)

General case
Theorem: There are O(n2) pairs of distances. Each distance may generate n/c period lengths, thus O(n3/c) possible period lengths in total. This also fixes the offset!
The longest c-dense repetitive pattern for each period length can be found in O(n) time, thus O(n4/c) time in total.
Can be improved to O(n7/2 log3 n).
[Djordjevic et al.’10]

Summary
Theorem:
Offset & period length O(n)
Period length O(n3/2 log2 n)Period length O(n log n) - approximate
Nothing O(n7/2 log3 n)

Open problems
1. Approximate version of the general version?
2. Improve running times?
3. Lower bounds?

Problem
( does not need to start and end at a vertex of G)
Q
G
Input: A Euclidean graph G in the plane
Preprocess G into a data structure such that given a polygonal query curve Q and a positive constant report all subcurves G for which
(,Q) ≤

Previous results
Assume is given as part of the input
Input: polygonal path P of size n and a constant >0Query: segment Q (length >6)
P Q
de Berg et al.’11: (Counting)6-distance approximationPreprocessing O(n2 + s polylog n) Space O(s polylog n)Query time O(n/s polylog n), for n<s<n2

Our results
A geometric graph G is c-packed if the total length of all the edges of G inside any ball is at most c times the radius of the ball.
Input: O(1)-packed tree T of size n and a constant >0Query: polygonal path Q of size m (each segment >2)
Gudmundsson and Smid:(3+)-distance approximation Preprocessing O(n polylog n)Space O(n polylog n)Query time O(m polylog n)
T

Our results
A geometric graph G is c-packed if the total length of all the edges of G inside any ball is at most c times the radius of the ball.
Input: O(1)-packed tree T of size n and a constant >0Query: polygonal path Q of size m (each segment >2)
Gudmundsson and Smid:(3+)-distance approximation Preprocessing O(n polylog n)Space O(n polylog n)Query time O(m polylog n)
T
Q

Our results
Pros: Extends to trees (instead of paths)Query path instead of query segmentApproximation improved from 6 to (1+) for query segments
(3+) for query paths Improved preprocessing time
Cons: Input must be O(1)-packedIf G is a tree the edges must be “long” GQ

74
• M. Benkert, B. Djordjevic, J. Gudmundsson and T. Wolle. Finding popular places. IJCGA, 2010.
• S. Alewijnse, T. Bagautdinov, M. de Berg, Q. Bouts, A. ten Brink, K. Buchin and M. Westenberg. Progressive Geometric Algorithms. SoCG, 2014.
• M. Buchin, A. Driemel, M. J. van Kreveld and V. Sacristan. Segmenting trajectories: A framework and algorithms using spatiotemporal criteria. Journal of Spatial Information Science, 2011.
• B. Aronov, A. Driemel, M. J. Kreveld, M. Loffler and F. Staals. Segmentation of Trajectories for Non-Monotone Criteria. SODA, 2013.
• M. Buchin, H. Kruckenberg and A. Kölzsch. Segmenting Trajectories based on Movement States. SDH, 2012.
• B. Djordjevic, J. Gudmundsson, A. Pham and T. Wolle. Detecting Regular Visit Patterns. Algorithmica, 2011.
References

75
• B. A. Burton. Searching a bitstream in linear time for the longest substring of any given density, Algorithmica, 2011.
• B. Djordjevic and J. Gudmundsson. Detecting areas visited regularly. COCOON 2010.
• M. de Berg, A. F. Cook IV and J. Gudmundsson. Fast Frechet Queries. CGTA, 2013.
• J. Gudmundsson and M. Smid. Frechet queries in geometric trees. ESA, 2013.
References