Embed Size (px)
Citation preview

Computational Neuroscience for Technology:Event-based Vision Sensors and Information Processing
Jörg Conradt
Neuroscientific System TheoryCenter of Competence on Neuro-Engineering
Technische Universität München
http://www.nst.ei.tum.de
28.11.2014 Qualcomm Vienna

Neuromorphic Engineering
Neuro - morphic
“to do with neurons”,i.e. neurally inspired “structure or form”
Discovering key principles by which brains workand implementing them in technical systems
that intelligently interact with their environment.
• analog VLSI Circuits to implement neural processing• Sensors, such as Silicon Retinae or Cochleae• Distributed Adaptive Control, e.g. CPG based locomotion• Massively Parallel Self-Growing Computing Architectures• Neuro-Electronic Implants, Rehabilitation
Examples:

Computation in Brains
Getting to know your Brain• 1.3 Kg, about 2% of body weight• 1011 neurons• Neuron growth:
250.000 / min (early pregnancy)… but also … loss 1 neuron/second

Computation in Brains
Getting to know your Brain• 1.3 Kg, about 2% of body weight• 1011 neurons• Neuron growth:
250.000 / min (early pregnancy)… but also … loss 1 neuron/second
“Operating Mode” of Neurons• Analog leaky integration in soma• Digital pulses (spikes) along neurites• 1014 stochastic synapses• Typical operating “frequency”:
≤100 Hz, typically ~10Hz, asynchronous

Computation in Brains ... and Machines
Getting to know your Brain• 1.3 Kg, about 2% of body weight• 1011 neurons• Neuron growth:
250.000 / min (early pregnancy)… but also … loss 1 neuron/second
“Operating Mode” of Neurons• Analog leaky integration in soma• Digital pulses (spikes) along neurites• 1014 stochastic synapses• Typical operating “frequency”:
≤100 Hz, typically ~10Hz, asynchronous
Getting to know your Computer’s CPU:• 50g, irrelevant for most applications• 2 • 109 transistors (Intel Itanium)• ideally no modification over lifetime
“Operating Mode” of CPUs• No analog components• Digital signal propagation• Reliable signal propagation• Typical operating frequency:
Several GHz, synchronous

10120 103 106 109
Elephant
Cat
Frog
Mouse
Honeybee
Zebrafish
Sponge
C. E
legans
Hum
an
Chim
panzee
Getting to know your Brain• 1.3 Kg, about 2% of body weight• 1011 neurons• Neuron growth:
250.000 / min (early pregnancy)… but also … loss 1 neuron/second
“Operating Mode” of Neurons• Analog leaky integration in soma• Digital pulses (spikes) along neurites• 1014 stochastic synapses• Typical operating “frequency”:
≤100 Hz, typically ~10Hz, asynchronous
Getting to know your Computer’s CPU:• 50g, irrelevant for most applications• 2 • 109 transistors (Intel Itanium)• ideally no modification over lifetime
“Operating Mode” of CPUs• No analog components• Digital signal propagation• Reliable signal propagation• Typical operating frequency:
Several GHz, synchronous
Computation in Brains ... and Machines
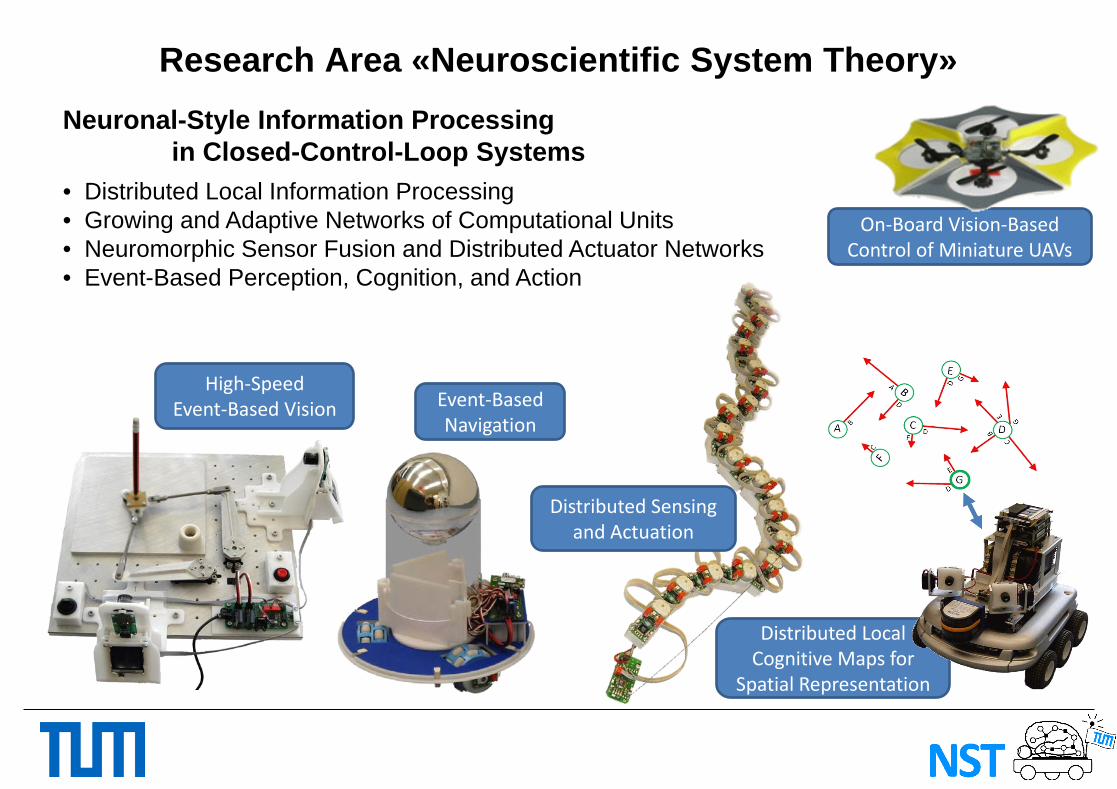
Research Area «Neuroscientific System Theory»
High-Speed Event-Based Vision
On-Board Vision-Based Control of Miniature UAVs
Distributed Local Cognitive Maps for
Spatial Representation
Event-Based Navigation
Neuronal-Style Information Processingin Closed-Control-Loop Systems
• Distributed Local Information Processing• Growing and Adaptive Networks of Computational Units• Neuromorphic Sensor Fusion and Distributed Actuator Networks• Event-Based Perception, Cognition, and Action
Distributed Sensing and Actuation

ARM7 μC
DVS Sensor
UART/SPI
52m
m
30mm• 128 x 128 pixels, each signalstemporal changes of illumination (“events”)
• Asynchronous updates (no image frames)• 15 μs latency, up to 1Mevents/sec
Joint work with the Neuromorphic Sensors Group, ETH/University Zurich
Retinal Inspired Dynamic Vision Sensor

Event - Based Vision
Frame - based Event - based
discrete time
full frames
continuous time
singular pixels

Advantages• Sparse data stream: ~0.1 MB/s bandwidth• ~10us response time• Local contrast adjustment per pixel• Automatic preprocessing
Challenges• Static scenes• New vision algorithms
for tracking, localization, ...
Event - Based Vision

An Asynchronous Temporal Difference Vision Sensor
Conradt et al, ISCAS 2009

An Asynchronous Temporal Difference Vision Sensor
Conradt et al, ISCAS 2009

26mm
36m
m
Target LED
RechargeableBattery
Microcontrollerfor PWM Signal
Power Switch
eDVS Event Time: tE = 5612μsEvent Position: PE = (3 /2)
Previous Event TimeMemory: tM = 4600μs
Target Marker LED
expectedΔtexp = 1000μs
2215 1650 4132 13 4231
3254 4132 4600 3432 2144
3124 5027 4301 4644 2234
2301 3113 1285 341 4233
…
…
128x128
tD = ΔtE - Δtexp = 12μs
ΔtE=tE-tM
20 40 60 80 100-100 -80 -60 -40 -20
1
tD
wT
time deviation tD in μs
GT: relative weight wT
Position Update: PT+1 = (1 – η(wT+wP))•PT + η(wT+wP)•PE
20 40 60 80 100
1
PD
wP
position deviation PD in pixel
GP: relative weight wP
PD = (PE – PT)2 = 17ΣCurrentTrackedPositionPT = (7 /3)
…
…128x128
0
6
12
Pixel X
Pixe
l Y
on event count
Müller et al, ROBIO 2011
Application Example: Tracking an Active Object

eDVS Sensor
Pan Servo
Tilt ServoLaser Diode
240mm
Marker
Application Example: Tracking an Active Object
Müller et al, ROBIO 2011

eDVS Sensor
Pan Servo
Tilt ServoLaser Diode
time
/ s0
2
4
6
8
10
Georg MüllerApplication Example: Tracking an Active Object
Müller et al, ROBIO 2011

(Fun) Application Example: High Speed Balancing of Short Poles
Conradt et al, ISCAS 2009

Incoming events
Current estimate
Converting Events into Meaning
(Fun) Application Example: High Speed Balancing of Short Poles
Conradt et al, ECV 2009

Extended Application Example: High Speed Tracking
Bamford et al, submitted EBCCSP’15

Application Example: SLAM for Event-Based Vision SystemsFramework: Particle Filter
Weikersdorfer et al, ROBIO 2012

Application Example: SLAM for Event-Based Vision SystemsEvent Based Localization
Weikersdorfer et al, ROBIO 2012

Application Example: SLAM for Event-Based Vision SystemsEvent Based Mapping
Weikersdorfer et al, ICVS 2013

Application Example: SLAM for Event-Based Vision SystemsEvent Based Mapping
Weikersdorfer et al, ICVS 2013

?
Application Example: SLAM for Event-Based Vision Systems
Hoffmann et al, ECMR 2013
5x real time

Event-based 3D SLAMwith a depth-augmented Dynamic Vision Sensor
• Sensor combination: event-based dynamic vision and PrimeSense object distance
• Sparse sensory data allows real-time processing and integration
• Localization update rates of > 100 Hzon standard PC
• Suitable for small autonomous mobile robotsin high-speed application scenarios
David Weikersdorfer, David B. Adrian,Daniel Cremers, Jörg Conradt
Technische Universität München, Germany
Weikersdorfer et al, ICRA 2014

An Autonomous Indoor Quadrocopter (eb3D SLAM)
Selected hardware components : eDVS (red), Mini-PC (blue),Primesense IR projector (yellow) and IR camera (green), and drone control board (magenta).
Parrot AR.Dronediam. ca. 80 cm

An Autonomous Indoor Quadrocopter (eb3D SLAM)
Evaluation against ground truth: eb-3DSLAMdesired trajectory ext. tracker (OptiTrack Flex13)

Outlook: An Autonomous Indoor Micro Quadrocopter (3D SLAM)
Micro - eDVS
Microcontroller
UART Port
Lightweight Lenses
Key Specs:• 20x20mm, 3g• 75mW power• 64KB SRAM• 32bit, 64MHz
DVS Sensor
16cm
Key Technical Specs:• Diameter 16cm• Weight 38g• Autonomy 14min


Neuromorphic Computing Landscape

• A million mobile phone processors in one computer
• Able to model about 1% of the human brain…
• …or 10 mice!
SpiNNaker Project

MobileDDRSDRAMinterface
Multi-chip packaging by
UNISEM Europe
SpiNNaker Chip

Distributed Neuronal Computation “on chip”Asynchronous Spiking Neural Computation Hardwarefor low-power real-time operation in Closed-Loop Systems
864 Core “Rack Version”
72 Core Evaluation
18 Core Stand-Alone Prototype
• Multi-channel spiking input and output• Stand-alone spiking computing system• Simulates ~20.000 neurons in real time• Small (~20x20mm); low power (~600mW)• Flexibly configurable, extendable, stackable
... to simulate 1 BillionSpiking Neurons
in real-time
http://www.nst.ei.tum.de

The SpiNNaker – Robot Interface Board
SpiNNakerInterface Board integrates as “additional chip”
IO BoardOmniBot
Retina
Balancer
…
Sens
ory/
Actu
ator
SpiN
Nak
erpa
cket
s
WLAN Interface
Embedded 768core SpiNNaker Board
Stereo eDVS sensors
Interface Board
NST SpOmniBot
Denk et al, ICANN 2013

Interface to Compliant Robotic Arm

Interface to Compliant Robotic Arm

Example Projects: SpOmniBee• 2 laterally facing retinas• Retina events feed into SpiNNaker• Distributed computation of local
optical flow• Global combination of optic flow• Computation of Motor commands
on SpiNNaker, send to robot
Goal:keep SpOmnibot centered inhallway with marking, similar to Srinivasan’s Bee experiments

Application Example: Event-Based Optic Flow for Robot Control

Example Projects: Ball Balancer• One Retina to observe the platform in top-down view• Two motors to control platform’s pan and tilt angles• SpiNNaker Interface Board is connected to retina and motors
Goal: Keep ball (one or more!) on a certain trajectory
Live Demo at HBP (EU Flagship) Inaugural Summit, Oct. 2013, Lausanne


Neural Principles for System Control
http://www.nst.ei.tum.de









![PROJECT - Gerd Conradt[BIO] Gerd Conradt is a director, film and video artist, producer and musician based in Berlin. He sees his video films as conceptional images of the times and](https://img.pdfslide.net/doc/110x75/5e8446a08885f65a917b499e/project-gerd-bio-gerd-conradt-is-a-director-film-and-video-artist-producer.jpg)



















