Embed Size (px)
Citation preview

1152 IEEE TRANSACTIONS ON COMMUNICATIONS, OCTOBER 1973
Since U; is a monotone decreasing function of N , it is evi- dent from ( 3 2 ) that Dl can be made arbitrarily small and Pl can be computed to any desired degree of accuracy.
Since Chebyshev’s bound is usually not tight on the tails of a distribution, other bounds, such as Chernoff s bound, could be used t o evaluate Pl from (1 1) if we can bound Pr[ I WR I > A ] . From the point of view of computation, we think that specific problems should determine the best way of evaluating Pl from
If no other technique could be found to bound the distribu- tion of W R , we have shown here that Chebyshev’s bound can be used in all cases to compute Pl if u i can be evaluated and if it is a monotone decreasing function of N .
If it is decided to use Chebyshev’s bound in (1 l ) , we can use the following procedure in evaluating Pl.
For any finite N , we first evaluate (e-X + e - y z )where x and y are given in ( 1 8 ) and (1 9).3 We then compute A from (3 1) and Pr[ I W R I > A ] from ( 2 8 ) . The upper and lower bounds on Pl are then determined from (1 1) and their difference com- puted. We increase N so that the desired accuracy of computa- tion is assured.
( 1 1).
V. CONCLUSIONS
For a digital system where the symbols may be correlated, we have derived upper and lower bounds on the probability of error when the system is subject to intersymbol interference and additive Gaussian noise.
The bounds, which are simple and easy to compute, are ex- pressed in terms of the error probability obtained with a fi- nite number N of intersymbol interference terms and some parameters associated with the remainder terms. It is also shown that the difference between the upper and lower bounds can be made arbitrarily small and that the error probability can be computed to any desired degree of accuracy.
REFERENCES
Computer-Aided Group Delay Equalization for Broad-Band Satellite Transponder Applications
G. P. VERGELLI AND D. CHAKRABORTY
Abstrucr-Equalization of the group delay characteristic of a satellite repeater has been examined. The channel group delay includes the transmit and receive filter group delay, and the transponder filter group delay. The perturbation of the transponder group delay of a satellite channel caused by the dual-path transmission effect resulting from an adjacent channel has also been studied.
Various combinations of filter and equalizing sections have been examined. In the realization of wide passband filters, equalization of group delay presents some difficulties, especially when i t is achieved by networks with many sections. The minimum peak-to-peak group delay deviation in the specified passband has been achieved by using a recent nonlinear programming technique with a penalty function approach.
INTRODUCTION The radio-frequency (RF) spectrum currently in use for
commercial satellite communications in the 4-/66Hz band is limited to 500 MHz. In an INTELSAT IV satellite, 12 tran- sponders, each having a 40-MHz bandwidth (usable 36-MHz bandwidth), utilize this available spectrum. In future satellites, it is envisaged that multiple spot beams will make it possible to use the 500-MHz bandwidth in the 4-/6-GHz band more than once in the same satellite. Estimation of group delay char- acteristics as functions of transponder bandwidth for a given filter configuration is an essential item in the system design study.
Once the design criteria satisfying the in-band. and out-of- band performance of a filter have been chosen, the designer has solved the problem of approaching an ideal attenuation characteristic, but is faced with a new problem: the distortion caused by the group delay peaks at the edge of the frequency
[ I 1 R. W. Lucky, J . Salz, and E. W. Weldon, Jr., Principles of D U ~ U band. To overcome this problem, an all-pass network is added Communication. New York: McGraw-Hill, 1968, pp. 59-63.
[ 21 M. R. Aaron and D. W. Tufts, “Intersymbol interference and in series to the filter. This network is used in an attempt to
error probability,” IEEE Trans. Inform. Theory, VOI. IT-12, pp. smooth the peaks at the band edges, a s well a s to flatten the 26-34, Jan. 1965.‘ group delay response inside the passband, without modifying plication t o ideal band-limited signaling,- IEEE Trans. Inform, the attenuation characteristics. Choosing appropriate values Theory, vol. IT-14, pp. 563-568, July 1968. for the poles and zeros of the all-pass network makes it pos- in digital systems,” IEEE Trans, Inform, Theory, vel, IT.15, pp. sible to achieve a desired flat” group response. 686-688. Nov. 1969. The optimization techniques selected and developed have error probability in the p s e n c e of intersymbol interference and been imp1emented after the problem as as additive Gaussian noise, Bell Syst. Tech. J . . vol. 49. pp. 2249- considering several strategies for optimization. A complete 2266, Nov. 1970.
intersymbol interference and Gaussian noise in digital communi. variety of filter characteristics has been developed for the cation systems,” IEEE Trans. Commun., vol. COM-19, pp. 113- IBM 360 computer. 119. Am. 1971.
[ 31 B. R. Saltzberg, Intersymbol interference error bounds with ap-
[ 4 ] R. Lugannani, “Intersymbol interference and probability of error
[ 5 1 E. Y . Ho and Y. S. Yeh, “A new approach for evaluating the
I 6 1 0, shimbo and M, celebiler, ‘<The probability of error due to computer package to design an Optimum for a wide
171 Y. S. Yeh and E. Y. Ho, “Improved intersymbol interference error bounds in digital systems,” Bell Syst. Tech. J . , vol. 50, pp. 2585- 2598, Oct. 197;;
[SI V. K. P;Bbhu, Some considerations of error bounds in digital systems, Bell Syst. Tech. J. ,vol. 50, pp. 3127-3151, Dec. 1971.
19) F. S. Hill, Jr;: “The computation of error probability for digital transmission, Bel/ Syst. Tech. J.., vol. 50, pp. 2055-2077, July/ Aug. 1971.
1101 F. E. Glave, “An upper bound on the probability of error due to intersymbol interference for correlated digital signals,” IEEE
[ 111 M. R . Aaron, PCM transmission in the exchange plant,” Bell Trans. Inform. cheory, vol. IT-18, pp. 356-363, May 1972.
[ 12 ] E. R. Kretzmer, “Generalization of a technique for binary data Syst. Tech. J . , vol. 41, pp. 99-141, Jan. 1962.
communication,” IEEE Trans. Commun. Tech., vol. COM-14, pp. 67-68, Feb. 1966.
[ 131 J . M. Sipress, “A new class of selected ternary pulse transmission plans for digital transmission lines,”IEEE Trans. Commun. Tech., vol. COM-13, pp. 366-372, Sept. 1965.
3The methods used for computing PI with a truncated pulse train can be used to determine (e-“’ + e -y ’ ) .
DETERMINATION OF THE OBJECTIVE FUNCTION
Let us denote the filter group delay as the implicit function of the frequency F ( v ) . I f the transfer function of the equalizer is expressed as a Laplace transform
n (Sz - 2aiS + a ! + b f )
i = l ( S 2 + 2aiS + af + biz) ’
its phase, with S = 27rjv, is
Paper approved by the Associate Editor for Space Communication of the IEEE Communications Society for publication without oral
upon work performed at COMSAT Laboratories under the sponsor- presentation. Manuscript received August 1972. This paper is based
ship of the International Telecommunications Satellite Consortium (INTELSAT). Any views expressed in this paper are not necessarily those of INTELSAT.
The authors are with the COMSAT Laboratories, Communications Satellite Corporation, Washington, D.C. 20024.

CONCISE PAPERS 1153
N 2ai ( 2 n v ) @ ( V I = - 2 arc tan
i= 1 af + b f - ( 2 7 ~ ~ ) ’
Its group delay, defined as
then becomes
where -ai f jbi are the poles of the equalizer, and ai f jbi are its zeros. The combined group delay of the filter plus equal- izer, C ( v ) = F ( v ) + E ( v ) , should ideally be constant in the band of interest.
It is impossible t o fulfill this condition; therefore, a criterion that will produce an almost flat C(v) must be determined. The main problem in the optimization of a physical entity is t o put into mathematical form the function to be minimized, (Le., t o develop a n objective function). The minimization of such a mathematical function does not, in general, give the desired performance in the actual case, primarily because re- quirements cannot be translated exactly into the mathematical language. Therefore, the selected objective function is not exactly the desired function, but something closely related to it. Often in problems of function behavior, such as the one discussed here, the objective function is chosen as the sum of the deviations from the desired response.
A perfect fit t o a zero-slope group delay (or linear phase) has been attempted for a Butterworth filter [ 1 1, where it was assumed that the total group delay is approximated by a polynomial of the fifth degree. An approach that is basically similar to that of [ 2 ] , but which has some additional refine- ments, is undertaken in this paper.
‘In [ 21 , a function is minimized in proportion to the de- viation from the desired insertion loss of a filter. An analogous approach is as follows. First, it is necessary t o find f = min subject to
u ( v l ; a l , . . * , a N , b l , . . . , b N ) < f U ( V u ; a l , . . . , a N , b l , . . * , b N ) < f
U ( v , ; a l ; * ~ , a N , b l , . . . , b N ) < E . . . . . . . .
. . . . . . . . . (IN 2 0
where V I and vu are the lower and upper bounds of the band, respectively, and v l , * * . , vk are K selected points inside the band. In addition, u(v ) is the variance at frequency v and is defined as
u(v ) = G ( v ) - - [ vu - VI 1; C ( V ) dv] ’, that is, the square of the deviation of the group delay C ( v ) from the mean in the interval (vl, vu). [It must be remembered that C(V) contains the parameters of the filter because it
depends on the filter group delay F ( v ) . ] The constraints designated by N in (3) restrict each real part of the equalizer poles -a; t o negative values (the condition of stability).
The K strategic points should be chosen at the minimum and maximum points of the final “optimum” group delay. It is obviously impossible to determine a priori the location of these points. Even if the locations are known, chances are that, depending on the starting configuration, these points will be far from the maxima and minima of the “local minimum” of ( 3 ) . In such a case there will be no control on the.points of maximum and minimum.
Three strategies have been developed to overcome this prob- lem. According to the first strategy, the group delay con- tribution from each term of ( 2 ) is
Equation (4) has the shape of a symmetrical hump of height 2/ai with its maximum at v = bi/2r1 (see Fig. 1). For fixed values of ai and bi with v variable, the integral
2ai dv a f + (27rv - hi)’
= 1
is used. Therefore, the value of bi does not have any effect on the maximum of the curve nor its width, but only on the shift of the curve. A different hi will only shift the curve while the maximum and width remain unchanged. Furthermore, the maximum and the width vary with ai. Increasing ai will lower the maximum and widen the curve so that the area of the curve along the v axis is always the same- [see (5) 1 . In fact, the integral is independent of ai and bi . The total time delay for the equalizer is the sum of contributions of the type described by (4) from each pole and zero pair, i.e., curves with the same area and shape but with different shifts b i , and different maxima, 2/ai.
The optimum solution should be an equiripple solution [ 3 ] ; therefore, the imaginary parts of the poles bi are likely t o be the maxima of the optimum group delay response. This con- sideration suggests that the variances u at all v = bi/27r should be restricted t o minima. In other words, if some of the V I , * * . , vk in ( 3 ) are variables whose values are constantly equal to the points of maximum, the points of maximum have been defined.
As the position of the poles changes, their contribution, shown in Fig. 1, shifts and the constraining points of the maximum will shift accordingly. The following constraints are therefore added to ( 3 ) :
~ [ ( b 1 / 2 n ) ; a ] , ’ ‘ . , a N , b l , * ‘ ‘ , bN < € 1 . . . .
u [ ( b ~ / 2 7 ~ ) ; a l ; . * , a N , b l ; . . , b N < f l . ( 6 )
Because of these shifts, it follows that each u(bJ27r) tends to approach zero during the minimization that, in turn, means that each hump contribution from Fig. 1 is such that G ( b i / 2 7 ~ ) tends to approach the mean
Hence, each 2/ai (see Fig. 1 ) will remain small enough to prevent any ai from approaching zero. This means that it is

1154 IEEE TRANSACTIONS ON COMMUNICATIONS, OCTOBER 1973
P I - 277
Fig. 1 . Group delay of one pole and zero.
Y
‘ 4 b2 /2* Y“
~. Fig. 2. Example of equalizer section.
unnecessary t o restrict the real parts ai t o positive values, since they will always be indirectly constrained by the inequal- ities of (61, (see Fig. 2 ) . It is known that fewer constraints lead to better accuracy and convergence of the mathematical optimization because the penalty function [ 4 ] , [ 5 ] is simpler.
Although the maxima of the optimum group delay C ( v ) have been constrained to approach the mean C ( v ) it is difficult t o determine a priori where the minima will be. For this reason, the importance of starting from a reasonable (although not optimum) solution, i.e., a solution for which the points of maximum and minimum will be very close to those of the final solution, is recognized in the third strategy. If these points are very close, it is natural to choose them as constraining points v l , . * , v k . Once the minimization procedure is terminated, the points of maximum and minimum of the “local optimum” solution v l , v 2 , . . . , u; are determined. If they are not coincident (or almost coincident) with the starting points v l , . . . , vk the minimization procedure can be started over again with the optimum solutfon take? as the starting solution and new constraining points V i , . . . , V k .
It should be noted that the new number of peak points K ’ will generally differ from the old number of peak points K . The procedure is repeated until the constrained points tend to “settle down”. The purpose of this procedure is to obtain the minimum peak-to-peak deviation in the passband. This de- viation cannot be defined mathematically simply because it is not known at which frequency the maximum and minimum peaks occur.
1 1
As discussed previously, the objective function is not the peak-to-peak deviation in the passband, but the maximum deviation from the mean. At each iteration of the minimiza- tion of the objective function E , the peak-to-peak deviation is noted. When a complete constrained minimization is termi- nated, this value is taken as the optimum solution, which is the starting point for the next constrained minimization.
It should be noted that the peak-to-peak minimization is performed with equal weight over the whole interval (VI, vu), regardless of the behavior of the group delay outside this interval.
CHOICE OF STARTING SOLUTION
For the first two strategies, the mathematical formulation is as follows. First, it is necessary to f ind E = min subject t o
U ( V ~ ; U ] , ” * , b N ) < ‘ 2 U ( V , ; U l , * ” , b ~ ) f E
U ( V l ; U l , ’ * . , b N ) < E
. . .
. . .
. . .
where vl, v1 , . . - , vk are constants, and b 1277, . . , b ~ / 2 n are variables.
The penalty function approach [ 5 ] is then used to convert the constrained problem into a sequence of unconstrained minimizations. Each unconstrained minimization is performed by using the steepest descent method in the algorithm discussed in [ 6 ] .
To attain a “global optimum,” it is necessary to start from a “good” solution. This solution does not have to be optimum, but it’must be strategically chosen so that it will converge at the “global minimum” or at a local minimum very close to it. To obtain this solution, an exaggerated equiripple solution, for which the maximum peaks at v = b 1 / 2 n are purposely made high, is derived by selecting a large value for 2/ai (and hence a small value for ai ) .
Specifically, the starting solution is selected as follows. First, the imaginary parts, b l , . . . , b N , are set equidistant in the passband interval [ 7 1
b i / 2 n = VI + (2 i - 1) (vu - v l ) / 2 N .
The final bi is not generally very different from these values. Next, each ai is chosen so that ai = l /F(v) , where
” tl - 1 F ( v ) = - F ( v ) dv
vu - V I I , is the mean of the filter group delay on the interval ( v l , v2). Once a set of ai and bi has been chosen, each a i is changed until its corresponding G ( b J 2 n ) - C(v) becomes greaterthan zero. This ensures that any G ( b i / 2 n ) will be higher than the mean G(v) . This starting solution has proven to be very suc- cessful for all filter evaluations attempted thus far.
NUMERICAL EXAMPLES Of the two classes of filters commonly used, i.e., Butterworth
(maximally flat) and Chebycheff equiripple filters, the latter gives a much sharper rate of cutoff than the former for a given number of filter sections. The satellite transponder is weight

CONCISE PAPERS 1 1 5 5
n 0.5 1.0 1.5 2.0
CHPNNEL 1. WIW'
'10 , '10
2 0 1.5 1 0 0 5 0 CHANNEL B , w I w '
Fig. 3. The 0.1-dB equiripple Chebycheff filter response with 10- percent guardband between adjacent channels.
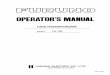
and volume limited; therefore, the Chebycheff filter is more suitable for this application. The selection of the number of filter sections required for the transponder is somewhat com- plicated and is dependent on the communications subsystem weight budget and the allowable guardband between the adja- cent channels. As an example, the attenuation-frequency characteristics of two adjacent channel filters using a 10- percent guardband are shown in Fig. 3 for 6-, 8-, and 10-section 0.1-dB equiripple Chebycheff filters; Fig. 4 shows the loss at the filter crossover point as a function of the adjacent channel guardband. For a minimum loss of 3 dB at the crossover point, eight transponder filter sections are required for a guardband of approximately 10 percent between adjacent channels.
The optimization technique discussed in this paper has been used to compute the group delay characteristics of 8section 0.1-dB equiripple Chebycheff filters with a 6-section equalizer. Fig. 5 shows the group delay response of the earth station transmit or receive filters at intermediate frequency (IF) as a function of the transponder bandwidth. Similar results for the transponder filter in the 4-GHz band are shown in Fig. 6. The composite group delay curves of the earth transmit and receive filters and the satellite transponder filters as functions of bandwidth are shown in Fig. 7 (solid curves).
If more than one transponder is used, an earth station receiving from a desired transponder A (direct path) will also receive a signal from the adjacent transponder B (indirect path). The strength of the indirect path is dependent on the relative gain through the two paths and the rejection of the indirect path filter. Although the indirect path consists of a filter and equalizer similar to those of the direct path, its center frequency is displaced by the transponder bandwidth plus 1 0 percent of this bandwidth, which is assumed as a guardband.
Fig. 8 is a basic schematic of the dual-path transmission model. In this figure, A I ( w ) represents the combined am- plitude response of the transponder - A filter plus the equalizer, and q51 ( w ) represents the combined phase response. Similarly, A 2 ( w ) and q52(w) represent the respective amplitude and phase responses of transponder B. The indirect path gives rise to both amplitude and phase perturbations in the direct path transmission. The modified group delay [8] is given by
- 1 I 0.1 -dB E(1UIRIPPLE CHEBYCHEFF
ONS
I 10 15 20
GUARDBAND BETWEEN ADJACENTCHANNEL IN PERCENTAGE OF BANDWIDTH
Fig. 4. Loss at the crossover point versus guardband between adjacent channels.
i'l ! 50 -MHz .O. l -dB EOUlRlPPLl BANDWIDTH ISMOOTHiD OUT RESPONSE1
150
500
0 0 50 100 t i0 200 250
iRiQUINCV iROY THE CENTER OF THE BAND lMHzl
Fig. 5 . Transmit or receive filter group delay versus transponder band- width (0.1-dB equiripple 8-section optimally equalized Chebycheff filter).
where
A A 2 (w)lA 1 (a), A 1 ( w ) Amplitude response of transponder A , A 2 ( w ) Amplitude respanse of transponder B ,
( w ) Phase response through transponder A , @?(id) Phase response through transponder B , and
Difference between G2 and G 1 .

1156 IEEE TRANSACTIONS ON COMMUNICATIONS, OCTOBER 1973
’- I I I I 1
I
, 0 50 100 150 200
FREOUENCY FROM THE C E N I E R OF THE BAND [MHz /
Fig. 6. Transponder traveling-wave tube (TWT) input filter group delay versus transponder bandwidth (0.1-dB equiripple 8-section optimally equalized Chebycheff filter).
Equation (7) has been computed for various values of and A = 1, and the worst case response has been noted. The results of the worst cases are indicated by the dotted curves in Fig. 7 .
CONCLUSION In the study presently under discussion, it has been very
useful t o rely on a program that can, in reasonable computer time (an average of about three minutes), provide a design based only on the characteristics of the filter and the number of equalizer sections desired. The automatic repetition of con- strained minimizations discussed in this paper does not require the user to provide an initial configuration, essential for every problem relating to the minimum of a function. In addition, the minimum obtained from this program is not much dif- ferent from the global minimum, if not coincident.
REFERENCES [ 1 1 R. S. Aiken, “Cut Butterworth filter phase distortion,” Electron.
[ 2 1 L. Lasdon, “Applications of mathematical programming to engi- Des., vol. 24, Nov. 22, 1969.
neering design.problems,” in Proc. Short Course on Rec. Develop. Operations Res. , June 1-3, 1966, Case Institute of Technology, Cleveland, Ohio.
[ 3 1 N. I . Achieser, Theory o,f &proxiyation’ (English transl.). New York: Unger, 1956.
1 I I
- INTRINSIC RESPONSI _-- RESPONSE PERTURBED BY DUAL-PATH TRANSMISSION
f i ’ TRANSPONDER BANOWITH, 50 MHz
0 25 50 15 100 5
Fig. 7. Composite (earth station transmit + receive + satellite transpon- der filter) group delay versus transponder bandwidth.
‘ I N P U T
D I F F E R E N C E
- CHANNEL B
, A M P L I T U O E A 2 ( w ] FROM TRANSPONDER. B PHASE + ( w J
INDIRECT PATH
[SEPARATION OF CENTER FREOUENCY OF lW0 CHANNELS = TRANSPONDER BANDWIDTH t 10% GUARDBAND)
Fig. 8. Dual-path transmission model.
[ 4 ] A. Fiacco and G. McCormick, “The sequential unconstrained minimization techniq.ue for non-linear programming. A primal-
[ 5 1 -, ‘!Computational algorithm for the sequential unconstrained dual method,”Management Sci., vol. 10, no. 2 , Jan. 1964.
minimization technique for non-linear programming,” Management
[ 6 j R. Fletcher and M. Powell, “A rapidly convergent descent method
171 R. L. Crane. “All-oass network svnthesis.” IEEE Trans. Circuit
Sci., vol. 10, no. 4; July 1964.
for minimization,” Comput. J . , vol. 6, p. 163. . 1
Theory, vol. CT-lS,’pp. 474-478, dec. 1968.
Dec. 1968. [ 81 “INTELSAT IV filter trade-off study,” Hughes Aircraft Company,

![TRANSPONDER BYPASS: SENTRY KEY [INSTALLATION GUIDE] · Transponder Bypass: RF override via induction w/ loop antenna (transponder incl. no key required). This transponder bypass kit](https://img.pdfslide.net/doc/110x75/5f51bec37e825f53705baf2b/transponder-bypass-sentry-key-installation-guide-transponder-bypass-rf-override.jpg)