Embed Size (px)
Citation preview

Consensus for Double Integrator Dynamicsin Heterogeneous Networks
Darina Goldin Sid Ahmed Attia Jorg Raisch
Abstract— In this paper we study topological propertiesof consensus algorithms for agents with double integratordynamics communicating over networks modeled by undirectedgraphs. Unlike existing work we drop the assumption thatthe positions and the velocities of the agents are shared alonghomogeneous communication networks. In fact, our main resultis that consensus can be achieved even though the networksalong which position and velocity information is shared aredifferent, and not even connected. We further provide insightson consensus rate based only on the topological properties ofthe network and show that unlike in homogeneous networks,consensus type cannot be changed by introducing gains.
I. INTRODUCTION
If a network of agents communicates and agrees upon avariable of interest, it is said to achieve consensus. Recentlythe consensus problem has received a lot of attention. Theresearch is motivated by a wide variety of applications,such as unmanned air and underwater vehicles, satellitesor flocking of birds. If all agents have similar sensors, thecommunication network is homogeneous and the consensusmechanisms behind it are well known. For the single-integrator consensus, that is, the case where all agents havesingle integrator dynamics, a lot of consensus results andapplications can be found in [1], [2] and the referencestherein.
While the results for single integrator agents are highly in-teresting and motivating, many real life applications possesshigher order integrator dynamics and it is often desirable toachieve consensus using not only information on the agents’positions, but also on their velocities. For example, somemobile robots can be feedback linearised and then describedas having double integrator dynamics, which naturally leadsto an extended algorithm that uses the additional stateinformation.
Second order integrator consensus is addressed for ex-ample in [3]. Motivated by the movement of a flock ofbirds, the authors derive an algorithm and show convergencefor directed, homogeneous networks. In [4] the authorsadress general higher order consensus and provide furtherinsight to the double integrator problem, by focusing onthe design of gains for directed, homogeneous networks. A
This work has been partially supported by the Deutsche Telekom Stiftungand the European Community’s Seventh Framework Programme underproject DISC (Grant Agreement n. INFSO-ICT-224498).
D. Goldin, S. A. Attia and J. Raisch are with TechnischeUniversitat Berlin, Fachgebiet Regelungssysteme, D-10587 Berlin,Germany. {goldin, raisch}@control.tu-berlin.de,[email protected].
J. Raisch is further with Max-Planck-Institut fur Dynamik komplexertechnischer Systeme, D-39106 Magdeburg, Germany.
consensus protocol that assumes velocity measurement butnot communication is given in [5]. In [6] the authors suggesta sampled-data control for double integrator agents that canonly obtain position measurements. The common assumptionin existing literature is, however, that all agents can measuretheir own positions and velocities and that this information isshared along a communication network in the same manner,i. e. that the communication networks are homogeneous.
In this paper we use the algorithm suggested in [3], whichwe choose for its flexibility. We assume that both positionand velocity measurements are possible for some agents,while others can measure only one of the states. We thusdrop the assumption on the homogenity of the network.This is motivated by application: Agents that measure andcommunicate only one of their states are cheaper both interms of hardware and communication costs, furthermoresensors may break down thus leading to agents havingless information. The presence of different agents in thenetwork leads to communication topologies for velocity andposition not being the same and we speak of a heterogeneouscommunication topology. Will the overall network achieveconsensus, how fast and to which consensus value? Thesequestions are answered in this paper. Our main result is thatunder well defined topological conditions the heterogeneousdouble integrator network achieves consensus on velocities,though not necessarily on positions, even if the individualcommunication layers are not connected. In fact, the neces-sary and sufficient condition for convergence is that the unionof the two communication graphs is connected. Furthermore,consensus on position is achieved if the positions are sharedalong a connected communication topology and at leasttwo agents additionally share their velocities, which is animportant relaxation of the conditions in [3].
In order to derive these results we use methods from ma-trix polynomial theory. Though they prove to be a powerfultool, to our knowledge matrix polynomials have not beenused for consensus type problems up to now. Part of ourcontribution can be seen as the extension of the so-calledinertia law [7] to the specific case of Laplacian matrices. Wethen provide bounds on the convergence rate and show thatwhile the network design is not crucial for consensus, it hasa significant effect on the convergence rate and influencesthe final consensus value.
This paper is organised as follows. In Section II wepresent the notation and model used and restate some ofthe well-known results in algebraic graph theory and matrixpolynomial theory, as well as some lemmas that are easy toderive using the existing tools. There we also summarize

the existing consensus algorithm for agents with doubleintegrator dynamcs. In Section III we state our main result.Finally, in Section IV we discuss the convergence rate andways to improve it. The conclusion is found in Section V.
II. PRELIMINARIES
A. Notation
Throughout this paper we write Im×m for the m×m iden-tity matrix and 1k×m and 0k×m for the one and zero matrixof size k ×m, respectively. We write lowercase latin letters(e. g. x) for vectors. We generally assume left eigenvectorsof a matrix to be row and right eigenvectors to be columnvectors. Re(α) and Im(α) denote the real and imaginaryparts of a complex number, respectively. We use greek letters(e. g. λ) to denote eigenvalues and order the eigenvaluesaccording to |Re(λ1)| ≤ |Re(λ2)| ≤ . . . ≤ |Re(λn)|. Thespectrum of a matrix A is denoted by spec(A). We write theJordan canonical form of L as J (L). The number of Jordanblocks of L corresponding to the eigenvalue λ is denotedjL(λ), while |jL,i(λ)|, 1 ≤ i ≤ jL(λ) denotes the sizeof the ith Jordan block of L corresponding to λ. We orderthe Jordan blocks of an eigenvalue according to their size,|jL,1(λ)| ≥ |jL,2(λ)| ≥ . . . ≥ |jL,jL(λ)(λ)|. If we want tomake a statement about several Jordan blocks at once, we usethe abbreviation jL,1...jL(λ)(λ). λ is called simple if it onlyhas Jordan blocks of size 1. Otherwisey λ is called deficient.We reserve n for the number of agents in the formation.
B. Modelling
In this contribution we consider a group of n mobile agentsmoving in a two- or three-dimensional space. We assumethat the individual agent’s dynamics is decoupled along thedifferent dimensions, i. e. that consensus in each directioncan be investigated as a one-dimensional problem.
We denote the position of an agent in such a one-dimensional space as xi, i ∈ {1, . . . , n}, and its velocityas xi. The positions (velocities) of all agents are collectedin the vector x (x). The agents have double integratordynamics, i. e. x = u, where x, u ∈ Rn and u is the controlinput. The agents move in a common reference frame andcan communicate their positions and velocities along somecommunication topologies.
In order to make this paper self-contained we now presentsome existing definitions and results in algebraic graph the-ory and matrix polynomial theory. Unless stated otherwise,the results provided in the following two sections are takenfrom the respective literature.
C. Algebraic Graph Theory
The high-level properties of a network can be modelledby a communication graph G = (V,E). For further detailson graph theory see e. g. [8]. The set of nodes is V ={v1, v2, . . . , vn} and corresponds to the different mobileunits and the set of edges E ⊆ V × V represents thecommunication possibilities between the units. An edge(vi, vj) signifies that vi can receive information from vj . Ourgraphs are undirected, i. e. (vi, vj) ∈ E ⇔ (vj , vi) ∈ E. We
further require that the graphs do not have self-loops, i. e.that (vi, vi) /∈ E. The union of i graphs Gi = (V,Ei) isdefined as G := (V,∪iEi).
A graph is connected if every two nodes are connectedvia a set of edges. If the graph is disconnected, then it hasseveral connected components. The extreme case is the graphwith no edges, E = ∅, which has n connected components.
An undirected graph can be expressed in terms of asymmetric adjacency matrix A(G), with the entries aij = 1if (vi, vj) ∈ E and aij = 0 otherwise. The degree of a nodeis given by d(vi) =
∑j aij . Let D(G) = diag(d(vi)) be the
degree matrix. Then the graph Laplacian L(G) is given asL(G) = D(G)−A(G). When clear, we will write L insteadof L(G).
The Laplacian matrix of an undirected graph has thefollowing properties:• L is symmetric positive semi-definite and therefore hasn linearly independent eigenvectors and all nonzeroeigenvalues of L are positive and real,
• the number of zero eigenvalues is the number of con-nected components of the graph, i. e. L has exactly onezero eigenvalue if the graph is connected,
• the rows and columns of L sum up to 0, i. e. 1n×1
(11×n) is a right (left) eigenvector of L correspondingto a zero eigenvalue,
• the second smallest eigenvalue of L is called the alge-braic connectivity and is a measure of how well a graphis connected [9]. It is zero if the graph is disconnected.
We now derive several results that we are going to needto prove the main result of this paper.
Lemma 1: Let L be an n×n Laplacian matrix associatedwith a connected undirected graph, let b = (b1, . . . , bn)T bea vector with entries bi ≥ 0, b 6≡ 0. There is no vector v thatsatisfies Lv = ±b.
Proof: Suppose that such a vector existed. Then wecan write elementwise l11v
1 + l12v2 + . . .+ l1nv
n
...ln1v
1 + ln2v2 + . . .+ lnnv
n
= ±
b1
...bn
(1)
obtaining n equations. We now take the sum of theseequations. Knowing that the column sums of L are zero weobtain 0 = ±
∑ni=1 b
i, which is a contradiction.One particular implication of this lemma is that there is
no v satisfying Lv = 1n×1.Lemma 2: Let L be an n × n Laplacian matrix associ-
ated with a connected undirected graph. The vector v =(11×k, 01×m)T , k+m = n, k,m 6= 0, is not an eigenvectorof L.
Proof: Suppose that L is connected and v is an eigen-
vector to the eigenvalue λ. Write L =
(Lk×k1 L2
LT2 Lm×m3
).
Then Lv = λv i. e.(L11
k×1
LT2 1k×1
)= λ
(1k×1
0m×1
). This equation
can be satisfied by a scalar λ only if LT2 1m×1 ≡ 0. This
condition is satisfied if and only if L has block diagonal

form, which is a contradiction to the requirement that L isconnected.
Corollary 1: Suppose that L consists of k connectedcomponents of size k1, k2, . . . , kk such that L can be pre-sented in block diagonal form. L has the eigenvector 1n×1
and the following additional k − 1 orthogonal eigenvectorscorresponding to the zero eigenvalue(
1k1×1
0(n−k1)×1
),
0k1×1
1k2×1
0(n−k1−k2)×1
, . . . ,0(n−kk−kk−1)×1
1kk−1×1
0kk×1
.
(2)The elements of (2) and 1n×1 are a basis of the zeroeigenspace of L.
Proof: Can be obtained by direct computations exploit-ing Lemma 2.
D. Consensus Algorithm
Let Gx be the graph of the communication network alongwhich the positions and Gx the graph of the communicationnetwork along which the velocities of the agents are com-municated. An intuitive consensus algorithm for the doubleintegrator consensus is given in [3]
x = u = −L(Gx)︸ ︷︷ ︸:=Lx
x− L(Gx)︸ ︷︷ ︸:=Lx
x (3)
and can be written in matrix form as(xx
)=
(0n×n In×n
−Lx −Lx
)︸ ︷︷ ︸
:=L
(xx
). (4)
We say that an algorithm achieves velocity consensusasymptotically if for any initial condition x0, x0 ∈ Rn, ast → ∞, ‖xi − xj‖ → 0, 1 ≤ i, j ≤ n and that it achievesposition consensus asymptotically if ‖xi − xj‖ → 0. Wewill use the term consensus type to characterise what kindof consensus (position and velocity, only velocity, or none)is achieved. Consensus is bounded if the consensus value isbounded.
In [3] Lx = Lx is assumed. In our work generallyLx 6= Lx. But since Gx and Gx share the same set of nodes,there is a structural dependance between the two matrices:If the nodes of Gx are renamed such that Lx obtains aspecific form, then the structure of Lx changes accordingly.Throughout this paper, we often do not explicitly mentionthis fact, but assume that if we transform one of the matrices,the other matrix changes as well.
E. Matrix Polynomial Theory
A comprehensive book on matrix polynomial theory is[10]. Here we summarise some of the definitions importantfor this paper. The function
P (λ) = Iλm +
m−1∑i=0
Liλi (5)
is called a monic matrix polynomial of degree m, whereLi are n × n matrices with real coefficients. The nm
eigenvalues λ0 of (5) are defined by detP (λ0) = 0 andthe corresponding eigenvectors by P (λ0)v = 0. The inertiaof P (λ) is the triple (π(P (λ)), ν(P (λ)), δ(P (λ))), whereπ(P (λ)), ν(P (λ)), δ(P (λ)) are the number of eigenvaluesof P (λ) with positive, negative and zero real parts countingmultiple eigenvalues, respectively.
All the eigenvalues of P (λ) are real or arise in complex-conjugated pairs. If Li = LTi , i = 0, . . . ,m − 1, then wespeak of a self-adjoint matrix polynomial. If P (λ) is self-adjoint, then P (λ0)v = vTP (λ0), i. e. the left and the righteigenvectors coincide.
Every matrix polynomial admits a number of matrix pencillinearisations, where the n× n matrix (5) is transformed toan nm × nm matrix (P1 − λI), which is linear in λ. P1
has the same spectral properties as P (λ). One of the mostcommon linearisations involves the matrix
P1 =
0 I 0 . . . 00 0 I . . . 0...
......
. . ....
0 0 0 . . . I−L0 −L1 . . . −Lm−1
(6)
and λ0 is an eigenvalue of P (λ) if and only if it is aneigenvalue of P1.
Eigenproblems of matrix polynomials of degree 2, P (λ) =λ2I+λL1+L0 are genereally referred to as quadratic eigen-value problems (QEP). QEPs arise in a number of engineer-ing applications, including dynamic analysis of structural,mechanical, and acoustic systems, electrical circuit simula-tion, fluid mechanics, and microelectromechanical systems.For an extensive review of applications and solutions of theQEP see [7]. If L1, L0 are positive definite, then it is a well-known result, called law of inertia, that ν(P (λ)) = 2n. Inthe following we are going extend the field of application ofthe QEP to consensus in multi-agent systems and the law ofinertia to semi-definite Laplacian matrices.
III. MAIN RESULT
In this section we present a number of supporting lemmas,followed by the main result. Remember that jL(λ) denotesthe number of Jordan blocks corresponding with the eigen-value λ of L and that |jL,i(λ)| denotes the size of its ithJordan block.
A. Supporting lemmas
Lemma 3: Let L be given as in (4). Then λ = 0 is aneigenvalue of L and all the corresponding right eigenvectorscan be written as (vT , 01×n)T , where v is a right eigenvectorof Lx corresponding to the eigenvalue 0. Consequently, ifjLx(0) = k, then jL(0) = k.
Proof: Can be obtained by straightforwardcomputations.
Lemma 4: Let L be given as in (4). Then λ = 0 is aneigenvalue of L then all the corresponding left eigenvectorsare given by (a, v), where v is a left eigenvector of Lxcorresponding to the eigenvalue 0 and a = vLx.

Proof: Obviously, a left eigenvector of L given by (a, b)must satisfy b = v and a− vLx = 0.
We can now present the first result on the eigenvalues ofL.
Lemma 5: Let L be given as in (4). If Gx and Gx areconnected, then jL(0) = 1 with |jL,1(0)| = 2. If Gx consistsof k connected components and Gx is connected, then itholds that jL(0) = k with |jL,1(0)| = 2 and |jL,2...k(0)| = 1.
Proof: We start with the connected case. Lx has a singleeigenvalue λ1 = 0 with a corresponding eigenvector 1n×1.We see directly that λ1 is also an eigenvalue of L and v1 =(11×n, 01×n)T is an eigenvector of L. We know by Lemma3 that v1 is the only eigenvector that satisfies Lv1 = 0, thusthere is exactly one corresponding Jordan block. We furthersee that v2 = (01×n, 11×n)T is a generalized eigenvectorthat satisfies Lv2 = v1, therefore |jL,1(λ1)| ≥ 2. By Lemma1 we know that there is no vector v3 satisfying Lv3 = v2.We have thus shown that L has a zero eigenvalue λ1 with acorresponding Jordan block of size 2.
Now let Gx be connected and Gx have k connectedcomponents. Clearly, Lx has k zero eigenvalues and, be-cause it is symmetric, k linearly independent eigenvectorsvi, i ∈ {1, . . . , k}. Lemma 3 states that (vTi , 0
T )T is aneigenvector of L if vi is an eigenvector of Lx. Hence thereare k linearly independent eigenvectors (vTi , 0
1×n)T of Lcorresponding to the zero eigenvalue, i. e. jL(0) = k.From Corollary 1 we know that the vi can be chosenas v1 = 1n×1, v2 = (11×k1 , 01×(n−k1))T , ... , vk =(01×(n−kk−kk−1), 11×kk−1 , 01×kk)T . From the proof of theconnected case it follows directly that (01×n, vT1 )
T is theonly generalized eigenvector of the eigenvector (vT1 , 0
1×n)T ,therefore |jL,1(0)| = 2. We now show that there is no gener-alized eigenvector belonging to the eigenvector (vT2 , 0
1×n)T .
We partition Lx =
(Lx1 00 Lx2
)and Lx =
(Lx1 Lx3LTx3 Lx2
),
where Lx1 is of dimension k1×k1, Lx2 of (n−k1)×(n−k1)and the Lxi matrices are chosen accordingly.
Clearly, if b = (bT1 , . . . , bT4 ) is a generalized eigenvector
belonging to (vT2 , 11×n)T , it must hold that (bT3 , b
T4 )T =
v2 = (11×k1 , 01×(n−k1))T and therefore −Lx2b2 =LTx31
1×k1 . The right hand of this equation is elementarygreater or equal zero, therefore it follows from Lemma 1that there is no vector b2 that satisfies the equation. Hence,we have shown that |jL,2(0)| = 1.
The proof for |jL,i(0)| = 1, i ∈ {3, . . . , n} is identical.
B. Inertia of LConsider again (4). Comparing it to (6) we see directly
that (L − λI) is a matrix pencil linearisation of the monicself-adjoint polyomial
P (λ) = Iλ2 + Lxλ+ Lx (7)
and thus P (λ) and L have the same spectra. Our startingpoint is that Lx, Lx are positive semi-definite. In [11] anextension of the law of inertia to semi-definite Lx and any Lxis presented. However the result obtained there is, translated
to our special case, based on the condition that the pair((0 −LxI Lx
),
(Lx0n×n
))(8)
be controllable, which is difficult to relate to properties ofgraphs. Due to the special form of graph Laplacians weare able to present a more constructive statement on theeigenvalues of P (λ).
Theorem 1: Consider system (7), where Lx and Lx areLaplacian matrices. It holds that jP (λ)(λ = 0) = k with|jP (λ),1(0)| = 2 and |jP (λ),2...k(0)| = 1 if and only if Gx hasexactly k connected components and Gx ∪Gx is connected.All the other eigenvalues of P (λ) have strictly negative realparts if and only if additionally Lx 6≡ 0.
Proof: We first derive an explicit formula for theeigenvalues of L. Writing
vTP (λ)v = λ2vT Iv + λvTLxv + vTLxv (9)
we can obtain λ as the solutions of
λ =−vTLxv ±
√(vTLxv)2 − 4(vT v)(vTLxv)
2vT v, (10)
where v is an eigenvector of P (λ) [7]. Since P (λ) hasat most 2n eigenvectors, (10) has at most 4n solutions.Therefore not all solutions of (10) belong to the spectrumof P (λ).
The first part of the theorem makes a statement about thezeros of det(P (λ)). Let Gx have k connected componentsand Gx ∪ Gx be connected. We obtain λ = 0 as a solutionof (10) only if v ∈ kerLx.
If additionally v ∈ kerLx, (10) is reduced to λ = 0.We know that there is at least one eigenvector that lies inthe kernel of both matrices, v = 1n×1. We have consideredthis vector in Lemma 5 and thus know that it leads to P (λ)having a deficient zero eigenvalue with |jP (λ),1(0) = 2|.
Suppose there exists another eigenvector that belongs tothe kernels of both matrices. Then, by Corollary 1, it has theform v = (11×k1 , 01×(n−k1))T , k1 6= 0 and we know thatwe can transform Lx and Lx to the form(
Lk1×k1x/x,1 0
0 L(n−k1)×(n−k1)x/x,2
). (11)
This means that the graph G = Gx ∪ Gx is disconnectedwhich contradicts the assumption.
Now let v /∈ kerLx. As the graph Gx has k connectedcomponents, we know from Corollary 1 and the previousparagraph that there exist exactly k − 1 such vectors. Then
(10) is reduced to λ =−vTLxv±
√(vTLxv)2
2vT vand we obtain
k− 1 pairs of solutions λ− = − vTLxvvT v
and λ+ = 0. As v /∈kerLx, λ− < 0. On the other hand, we know from Lemma 5that |jL,i(λ+)| = 1, i ∈ {1, . . . , k−1}. We have thus shownthe sufficiency of the first statement of the theorem.
For necessity, suppose first that jP (λ)(λ = 0) = m > k.Then either Gx has k+1 connected components or there areseveral vectors that satisfy v ∈ kerLx and v /∈ kerLx, i. e.Gx ∪Gx is disconnected.

Now suppose that jP (λ)(λ = 0) = k with |jP (λ),1(0)| = 2and |jP (λ),2(0)| = 2. Again, this can only occur if severaleigenvectors of P (λ) lie in the kernel of both Lx and Lx.
Finally the fact that there is no jP (λ)(λ = 0) = k with|jP (λ),1(0)| > 2 can be shown in complete analogy with thefirst part of Lemma 5. Hence follows the necessity of thefirst statement of the theorem.
It remains to show that the nonzero eigenvalues of Lhave negative real parts if and only if additionally Lx 6≡ 0.As all solutions of (10) are imaginary for Lx ≡ 0, this isobviously necessary. To show sufficiency, assume Lx 6≡ 0. Ifv ∈ kerLx and v ∈ kerLx, (10) admits only zero solutions.If v /∈ kerLx, all nonzero solutions of (10) have negative realparts. The only remaining case is v ∈ kerLx and v /∈ kerLx.Then (10) has a pair of purely imaginary soluitons λ = ±ir,r 6= 0. We now show that these are not eigenvalues ofdet(P (λ)). If they were, it must hold that
P (λ)v = (−Ir2 ± irLx + Lx) = 0⇔ (−Ir2 + Lx)v = 0(12)
i. e. −r2 would be an eigenvalue of the positive semidefinitematrix Lx, which is clearly impossible. This concludes theproof.
In other words, the inertia of P (λ) are given by δ(P (λ)) =δ(Lx) + δ(Lx) = k, ν(P (λ)) = 2n − δ(P (λ)) = 2n − kand consequently π(P (λ)) = 0 if and only if δ(Lx) 6= n.Furthermore, δ(P (λ)) = 2n and accordingly π(P (λ)) =ν(P (λ)) = 0 if and only if additionally δ(Lx) = n.
C. Convergence of the consensus algorithm
We are now ready to present our the necessary andsufficient conditions for the convergence of the consensusalgorithm.
Theorem 2: Consider the double integrator consensusproblem for n mobile agents. Let the position informationbe shared along the communication network Gx and the ve-locity information along Gx. Algorithm (4) achieves velocityconsensus asymptotically if and only if
(i) Gx ∪Gx is connected and(ii) Lx 6≡ 0.
It achieves velocity and position consensus asymptotically ifand only if (i) and (ii) hold and additionally
(iii) Gx is connected.Proof: The second part of this theorem is equivalent
to jL(0) = 1 and |jL(0)| = 2, which is a special case of[3] and the proof is given there. For the first part, note thataccording to Theorem 1, (i) and (ii) is equivalent to jL(0) =k, |jL,1(0)| = 2, |jL,2...k| = 1, where k is the number ofconnected components of Gx, and all nonzero eigenvaluesof L have negative real parts. The remaining proof uses theJordan canonical form and is reminiscent of the proof in [3].
The Jordan canonical form of L, J (L) is given by
V −1LV =
w0
...w2n−1
L (u0 . . . u2n−1)= J , (13)
where ui can be chosen among the right eigenvectors andgeneralized eigenvectors of L, and wi are left eigenvectorsand generalized eigenvectors of L scaled and allocatedaccordingly. Let Lx have k connected components of sizek1, . . . , kk. Without loss of generality we can choose u0 =(11×n, 01×n)T , u1 = (01×n, 11×n)T , w0 = (p11
1×n, 01×n),w1 = (01×n, p11
1×n), p1 = 1/n. By Corollary 1 we knowthat Lx admits the additional set of eigenvectors (2) that weuniformly denote v2, . . . , vk. We then know from Lemma 3and Lemma 4 that ui = (vTi , 0
1×n)T and wi = (ai, pivi),pi = 1/ki−1, 2 ≤ i ≤ k can be chosen as the left and righteigenvectors of L. The Jordan matrix then has the form
J =
J0 0 00 J 0
0 0 J
, (14)
where J0 =
(0 10 0
)and J = 0(k−1)×(k−1) are the collected
Jordan blocks corresponding to the zero eigenvalue and J arethe remaining Jordan blocks. Thus
eLt = eV J tV−1
= V
eJ0t 0 00 eJt 0
0 0 eJt
V −1. (15)
Since all nonzero eigenvalues of L have negative real partswe know that eJt → 0 as t→∞. On the other hand
eJ0t =
(1 t0 1
)and eJt = I(k−1)×(k−1). (16)
We can thus write (15) as the following direct sum
eLt =(u0 u1
)(1 t0 1
)(w0
w1
)+(u2 . . . uk
)w2
...wk
(17)
or equivalently
eLt =1
n
(1n×1 0n×1
0n×1 1n×1
)(1 t0 1
)(11×n 01×n
01×n 11×n
)+
+
(v2 . . . vk
0n×1 . . . 0n×1
)w2
...wk
.
(18)
Thus we obtain
limt→∞
x(t) =1
n
n∑j=1
xj(0) (19)
which is bounded velocity consensus.Necessity follows from the fact that any matrix L with
a different Jordan form will not achieve the desired conver-gence.
Remark 1: One direct consequence of Theorem 2 is thatagents with double integrator dynamics cannot achieve con-sensus using only position information.Note that if Gx has k connected components, then the in-dividual components will achieve position consensus withinthemselves with a constant offset between the agent groups.

1
2
3
4
5
(a) Graph 1
1
2
3
4
5
(b) Graph 2
1
2
3
4
5
(c) Graph 3
1
2
3
4
5
(d) Graph 4
1
2
3
4
5
(e) Graph 5
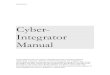
Fig. 1: Different communication topologies for five agents.
This result is physically plausible: While position consensusis impossible without velocity consensus, the converse makessense. With x(t) =
∫x(τ)dτ + d we see that d is exactly
the offset produced by the different connected components.This offset can easily be calculated from (18).
Corollary 2: Consider the consensus algorithm (4). Theconsensus type can not be influenced by introducing positiveweights for the graphs Gx and Gx.
Proof: We have shown that the inertia of L dependonly on the connectivity of Gx and Gx and that the consensustype depends entirely on the inertia of L. Introducing positiveedge weights does not affect the connectivity of a graph.
IV. CONVERGENCE RATE
Example 1: Consider the graphs in Fig. 1. Let Gx begraph 2, Gx be graph 1. This system is simulated in Fig. 2with initial states from the interval (−15, 15). The systemachieves velocity consensus even though Gx is not con-nected. The spectrum of the consensus matrix is spec(L) ={0, 0, 0,−0.4 ± 1.7i,−0.15 ± 0.88i, 0.64 ± 0.72i,−2.34},which explains the high amount of oscillation in the velocityplot. As Gx is not connected, there is no position consensus.In particular, Gx consists of 2 connected components andthe positions converge to two different values.
Intuitively, we expect less oscillation if the connectivityof Gx is higher. This is confirmed by the simulation resultsin Fig. 3. Here Gx is given by graph 4 in Fig. 1 andconsensus is achieved much faster. Note that the time scalegoes to 15 instead of 100 as in Fig. 2. We therefore postulatethat consensus rate is largely dependent on the chosencommunication topologies.
It is a known result that the convergence rate of thesingle integrator consensus is bounded by the algebraicconnectivity of the corresponding Laplacian matrix. Let dx =1n
∑ni=1 x
i(0)1n×1. Note that dx lies in the kernel of anyLaplacian matrix. Define the group velocity error vector ase(t) = x(t) − dx. Then the error dynamics of the secondorder consensus algorithm are given by
e =d
dt(−Lxx− Lxx) = −Lxe− Lxe (20)
or, in other words,(ee
)=
(0 I−Lx −Lx
)(ee
). (21)
Let λcrit = mini∈{1,...,2n},λi 6=0 |Re(λi)|, where λi are theeigenvalues of L. We know from classic control theory that
(21) converges to zero with a rate that is equal to or fasterthan λcrit and therefore (4) reaches consensus asymptoticallywith a rate that is equal to or faster than λcrit. In order tofind the value of λcrit we use the fact that for a Laplacianmatrix
0 ≤ vTLv
vT v≤ µn, (22)
where µn is the largest eigenvalue of the Laplacian. Let agraph have k connected components of size k1, . . . , kk, andGki be the graph corresponding to the connected component
0 10 20 30 40 50 60 70 80 90 100−50
0
50
100
time
posi
tion
0 10 20 30 40 50 60 70 80 90 100−20
−10
0
10
20
time
velo
city
Fig. 2: Gx as graph 2, Gx as graph 1, velocity consensus.
0 5 10 15−20
0
20
40
60
time
posi
tion
0 5 10 15−20
−10
0
10
20
time
velo
city
Fig. 3: Gx as graph 2, Gx as graph 4, velocity consensus.

0 5 10 15 20 25−30
−20
−10
0
10
20
time
posi
tion
0 5 10 15 20 25−15
−10
−5
0
5
10
time
velo
city
Fig. 4: Gx as graph 3, Gx as a fully connected graph, velocityand position consensus.
of size ki. Then the largest eigenvalue of the correspondingLaplacian is bounded by [9] mini,ki 6=1
kiki−1 maxj d(vj ∈
Gki) ≤ µn ≤ maxi ki. Here d(vj) denotes the degree ofnode vj . Note that maxj d(vj ∈ Gki) ≤ ki − 1.
Let Gx have kx connected components of sizekx1 , . . . , k
xkx , whith kxmax = maxi k
xi . Let Gx have kx
connected components, with, analogously, kxmax = maxi kxi .
Remember that vTLxv 6= 0 by Theorem 1. We have
0 <vTLxv
vT v≤ kxmax. (23)
Looking at (10) we see that, with vT v = 1, if (vTLxv)2 ≤
4vTLxv, λcrit depends entirely on the eigenvalues of Lx.Thus, if kxmax � kxmax, it is possible that L will haveeigenvalues with a small real and a large imaginary part. Onthe other hand, if Lx is well connected and kxmax is small, theeigenvalues of L will be real or have small imaginary parts.This leads us to the observation that if only a small numberof agents can exchange their velocity (i. e. kxmax is small),the number of agents exchanging their position should be assmall as possible, too, in order to avoid oscillations. This,however, leads to a small λcrit. We further see that λcrit isbounded by
0 < λcrit ≤ n, (24)
where the upper bound is tight (choose Gx fully connectedand Gx empty).
Example 2: Let Gx be given by graph 3 in Fig. 1. Choos-ing Gx as the complete graph (graph 5 in Fig. 1) leads to Lhaving only real eigenvalues. The system achieves velocityand position consensus asymptotically. The simulation resultsare given in Fig. 4.
On the other hand, choosing Gx as a complete graphand Gx as graph 3 leads to L have eigenvalues with largeimaginary parts and real parts that are so small, that they arenumerically rounded to zero.
Example 3: Fig. 5 shows simulation results for a networkof 30 nodes, half of which can communicate both theirposition and velocity and the other half only their position.Gx is a random connected graph and Gx is a subgraph of Gxthat is obtained by deleting all the edges between nodes thatcannot communicate velocities. The intial states are chosenfrom the interval (−50, 50). The network achieves positionand velocity consensus asymptotically.
V. CONCLUSION
In this contribution we have investigated the consensusfor mobile agents with double integrator dynamics commu-nicating over heterogeneous networks. We have shown thataverage consensus on velocities is achieved if at least twounits share velocity information and the union of the velocityand position communication topologies is a connected graph.If, additionally, the position communication topology is aconnected graph, average consensus is achieved on bothvelocity and position. This condition is also necessary. Wehave presented tight bounds on the consensus rate and relatedit to topological properties of the network.
REFERENCES
[1] W. Ren and R. W. Beard, Distributed Consensus in Multi-vehicleCooperative Control, Theory and Applications. Springer London,2007.
[2] R. Olfati-Saber, J. A. Fax, and R. M. Murray, “Consensus andcooperation in networked multi-agent systems,” Proceedings of theIEEE, 2007.
[3] W. Ren and E. Atkins, “Second-order consensus protocols in multiplevehicle systems with local interactions,” in AIAA Guidance, Naviga-tion, and Control Conference and Exhibit, 2005.
[4] P. Wieland, J.-S. Kim, H. Scheu, and F. Allgower, “On consensus inmulti-agent systems with linear high-order agents,” in Proceedings ofthe 17th IFAC World Congress, 2008.
[5] G. Xie and L. Wang, “Consensus control for a class of networksof dynamic agents: Fixed topology,” in 44th IEEE Conference onDecision and Control, and the European Control Conference 2005,2007.
[6] Y. Gao, L. Wang, G. Xie, and B. Wu, “Consensus of multi-agentsystems based on sampled-data control,” International Journal ofControl, 2009.
[7] F. Tisseur and K. Meerbergen, “The quadratic eigenvalue problem,”Siam Review, Vol. 43 No. 2, 2001.
[8] C. Godsil and G. Royle, Algebraic Graph Theory. Springer, 2001.[9] B. Mohar, “The Laplacian spectrum of graphs,” Graph Theory, Com-
binatorics, and Applications, 1991.[10] I. Gohberg, P. Lancaster, and L. Rodman, Matrix Polynomials. SIAM
Classics in Applied Mathematics, 2009.[11] B. Bilir and C. Chicone, “A generalization of the inertia theorem for
quadratic matrix polynomials,” Linear Algebra and its Applications280, 1998.
0 50 100 150−150
−100
−50
0
50
time
posi
tion
0 50 100 150−100
−50
0
50
100
time
velo
city
Fig. 5: Random network on 30 nodes, Gx connected, positionand velocity consensus.