Embed Size (px)
Citation preview
Consequences of STR
Kirit Makwana
September 13, 2020
Kirit Makwana Consequences of STR September 13, 2020 1 / 25
Length contraction
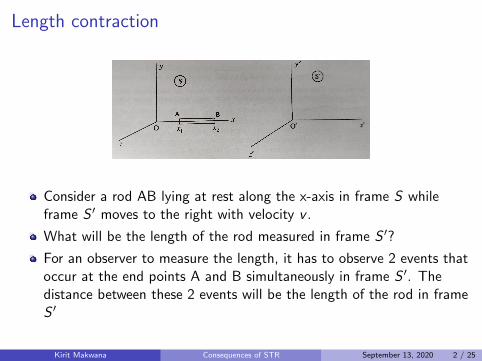
Consider a rod AB lying at rest along the x-axis in frame S whileframe S ′ moves to the right with velocity v .
What will be the length of the rod measured in frame S ′?
For an observer to measure the length, it has to observe 2 events thatoccur at the end points A and B simultaneously in frame S ′. Thedistance between these 2 events will be the length of the rod in frameS ′
Kirit Makwana Consequences of STR September 13, 2020 2 / 25
Length contraction
Consider that these events occur at location x ′1 and x ′2 for A and Brespectively, at time t ′. By the inverse transform we have
x1 =x ′1 + vt ′√
1− v2
c2
, x2 =x ′2 + vt ′√
1− v2
c2
(1)
=⇒ x2 − x1 =x ′2 − x ′1√
1− v2
c2
=⇒ L′ =L
γ(2)
This factor 1/√
1− v2
c2is called γ or the Lorentz factor, and it is
always greater than 1 (we will see that v < c). We see that thelength measured of a moving rod is reduced by the Lorentz factorcompared to when it is stationary
This calculation can be inverted by placing the rod at rest in frameS ′. Then the length measured in frame S will appear contracted.
Proper length is the length of an object measured in a frame where itis at rest. It is the longest length measured in any frame
Kirit Makwana Consequences of STR September 13, 2020 3 / 25
Time dilation
Place a clock at rest at origin O ′ in frame S ′. Consider the ticks ofthe clock as events happening at x ′ = 0. Lets suppose 2 consecutiveticks happen at times t ′1 and t ′2.
In frame S these will occur at times
t1 = γt ′1, t2 = γt ′2 (3)
=⇒ t2 − t1 = γ(t ′2 − t ′1) =⇒ ∆t = γ∆t ′ (4)
The time interval observed in frame S will be larger than the timeinterval observed in the frame S ′ where the clock is at rest. Thismeans clocks tick fastest in their frame of rest. When observed fromother moving frames the clock ticks slower. This can also be seen byinverting the clock in frame S and measuring in frame S ′.
This is called time dilation. Proper time is the time between 2 eventsmeasured in the frame in which the events happen at same position.
Kirit Makwana Consequences of STR September 13, 2020 4 / 25
Experimental verification of time dilation
Half life of radioactive decay is typically measured in the rest framewhere the radioactive atoms decay. Consider these radioactive atomsare at rest in the frame S ′ which is moving with velocity v w.r.t. thelaboratory frame S . The number of radioactive atoms at time t ′ inframe S ′ will be
N = N0e−t′/T0 (5)
The decay events happen at x ′ = 0 so the inverse transform givesx = γvt ′ and t = γt ′. So the decay in terms of time in frame Sbecomes
N = N0e−t/(γT0) (6)
The half-life of rapidly moving nucleus will be more than the samenucleus at rest.
Kirit Makwana Consequences of STR September 13, 2020 5 / 25
Muon decay
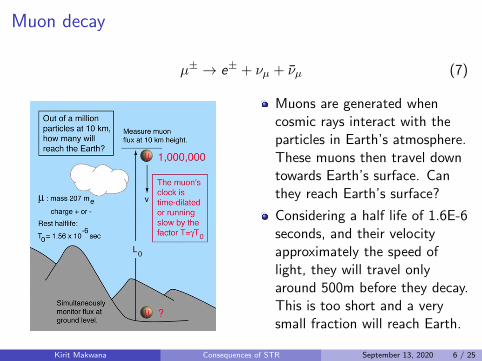
µ± → e± + νµ + νµ (7)
Muons are generated whencosmic rays interact with theparticles in Earth’s atmosphere.These muons then travel downtowards Earth’s surface. Canthey reach Earth’s surface?
Considering a half life of 1.6E-6seconds, and their velocityapproximately the speed oflight, they will travel onlyaround 500m before they decay.This is too short and a verysmall fraction will reach Earth.
Kirit Makwana Consequences of STR September 13, 2020 6 / 25
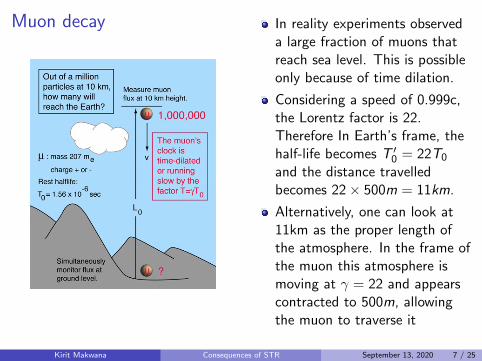
Muon decay In reality experiments observeda large fraction of muons thatreach sea level. This is possibleonly because of time dilation.
Considering a speed of 0.999c,the Lorentz factor is 22.Therefore In Earth’s frame, thehalf-life becomes T ′0 = 22T0
and the distance travelledbecomes 22× 500m = 11km.
Alternatively, one can look at11km as the proper length ofthe atmosphere. In the frame ofthe muon this atmosphere ismoving at γ = 22 and appearscontracted to 500m, allowingthe muon to traverse it
Kirit Makwana Consequences of STR September 13, 2020 7 / 25
Twins paradox
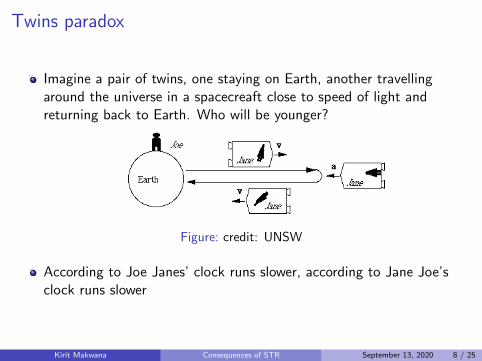
Imagine a pair of twins, one staying on Earth, another travellingaround the universe in a spacecreaft close to speed of light andreturning back to Earth. Who will be younger?
Figure: credit: UNSW
According to Joe Janes’ clock runs slower, according to Jane Joe’sclock runs slower
Kirit Makwana Consequences of STR September 13, 2020 8 / 25
Twins paradox
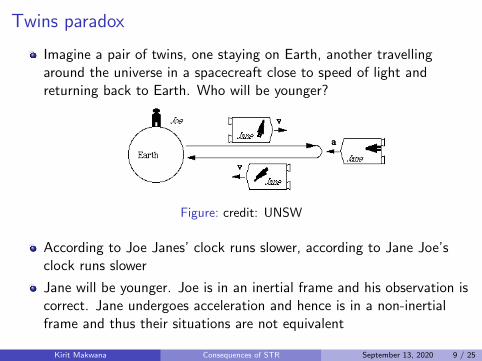
Imagine a pair of twins, one staying on Earth, another travellingaround the universe in a spacecreaft close to speed of light andreturning back to Earth. Who will be younger?
Figure: credit: UNSW
According to Joe Janes’ clock runs slower, according to Jane Joe’sclock runs slower
Jane will be younger. Joe is in an inertial frame and his observation iscorrect. Jane undergoes acceleration and hence is in a non-inertialframe and thus their situations are not equivalent
Kirit Makwana Consequences of STR September 13, 2020 9 / 25
Non-relativistic doppler effect
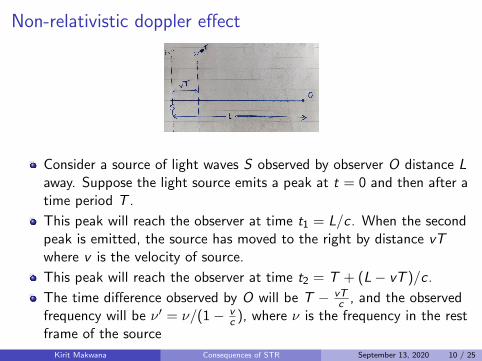
Consider a source of light waves S observed by observer O distance Laway. Suppose the light source emits a peak at t = 0 and then after atime period T .
This peak will reach the observer at time t1 = L/c . When the secondpeak is emitted, the source has moved to the right by distance vTwhere v is the velocity of source.
This peak will reach the observer at time t2 = T + (L− vT )/c .
The time difference observed by O will be T − vTc , and the observed
frequency will be ν ′ = ν/(1− vc ), where ν is the frequency in the rest
frame of the source
Kirit Makwana Consequences of STR September 13, 2020 10 / 25
Relativistic Doppler effect
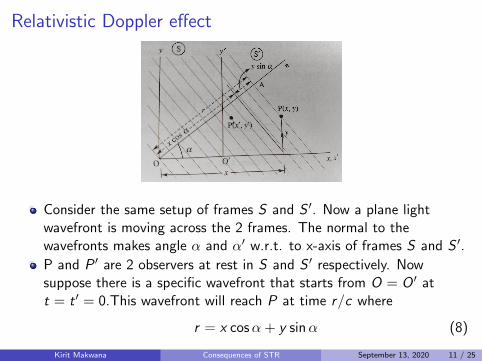
Consider the same setup of frames S and S ′. Now a plane lightwavefront is moving across the 2 frames. The normal to thewavefronts makes angle α and α′ w.r.t. to x-axis of frames S and S ′.
P and P ′ are 2 observers at rest in S and S ′ respectively. Nowsuppose there is a specific wavefront that starts from O = O ′ att = t ′ = 0.This wavefront will reach P at time r/c where
r = x cosα + y sinα (8)
Kirit Makwana Consequences of STR September 13, 2020 11 / 25
Relativistic Doppler effect
In frame S ′ P ′ will observed this wavefront aftert ′ = r ′/c = (x ′ cosα′ + y ′ sinα′)/c
After these wavefront crosses these observers, they start counting thenumber of wavefronts. After some time, these observers overlap attime T in S and T ′ in S ′.
Number of wavefronts counted by P will be ν(T − (r/c)), and by P ′
will be ν ′(T ′ − (r ′/c)). Physically the same wavefronts should havecrossed these 2 observers by then, so these 2 should be equal.
ν(T − x cosα + y sinα
c) = ν ′(T ′ − x ′ cosα′ + y ′ sinα′
c) (9)
Now use the inverse transform and the fact that (x , y) and (x ′, y ′)coincide at T (T ′)
T = γ(T ′ + (v/c2)x ′) x = γ(x ′ + vT ′) y ′ = y (10)
Kirit Makwana Consequences of STR September 13, 2020 12 / 25
Relativistic Doppler effect
This gives
ν
(T ′ + (v/c2)x ′√
1− (v2/c2)−
x ′+vT ′√1−v2/c2
cosα + y ′ sinα
c
)= (11)
ν ′(T ′ − x ′ cosα′ + y ′ sinα′
c) (12)
Note that (x ′, y ′) is the position of the observer P ′ in frame S ′. T ′ isthe time in frame S ′ when observer P coincides with P ′.
Keeping (x ′, y ′) fixed, T ′ can be changed by changing the x positionof observer at P so that it takes a different time for the 2 observers tocoincide.
This implies that T ′ is a variable that is independent of x ′ and y ′.
Kirit Makwana Consequences of STR September 13, 2020 13 / 25
Relativistic Doppler effect
Since T ′ is an independent variable, we can equate its coefficientsacross the 2 sides of the equation to get
ν ′ =ν(1− v
c cosα)√1− v2
c2
(13)
Let α be the angle measured in the observer frame, so that the S ′ isthe source rest frame, and v is the velocity of the source according tothe observer who is in frame S .
So ν is frequency measured by observer while and ν ′ is rest framefrequency ν0. This gives
ν = ν0
√1− (v2/c2)
1− v ·nc
(14)
Here n is unit vector along wavevector of light as seen in observerframe and v is direction of velocity of source in frame of observer
Ignoring second order (v/c)2 term we get the non-relativistic limit
Kirit Makwana Consequences of STR September 13, 2020 14 / 25
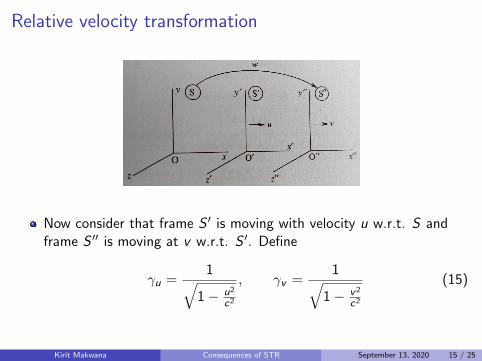
Relative velocity transformation
Now consider that frame S ′ is moving with velocity u w.r.t. S andframe S ′′ is moving at v w.r.t. S ′. Define
γu =1√
1− u2
c2
, γv =1√
1− v2
c2
(15)
Kirit Makwana Consequences of STR September 13, 2020 15 / 25
Relative velocity transformation
The transformation equations are
x ′ = γu(x − ut), t ′ = γu(t − ux
c2) (16)
x ′′ = γv (x ′ − vt ′), t ′′ = γv (t ′ − vx ′
c2) (17)
Now if we want to go directly from frame S to S ′′, we can derive
x ′′ = γvγu(1 +uv
c2)
{x − (u + v)t
1 + uvc2
}(18)
Now define w = u+v1+ uv
c2and derive that (try yourself)
1− w2
c2=
1
γ2uγ2v (1 + uv
c2)2
(19)
Kirit Makwana Consequences of STR September 13, 2020 16 / 25
Relative velocity transformation
Now the transform from S to S ′′ is
x ′′ =1√
1− w2
c2
(x − wt) (20)
In a similar way it can be derived that
t ′′ = γw
(t − u + v
1 + uvc2
x
c2
)(21)
We find that there transforms are like the Lorentz transform but withvelocity w . What this means is that the velocity of frame S ′′ in frameS is w = (u + v)/(1 + uv
c2)
This is Einstein’s law of addition of velocities. In Galilean relativitythis velocity would just be u + v . If u, v � c , then it reduces toGalilean version
Also note that even if u = c and v = c , w will also be c only
Kirit Makwana Consequences of STR September 13, 2020 17 / 25
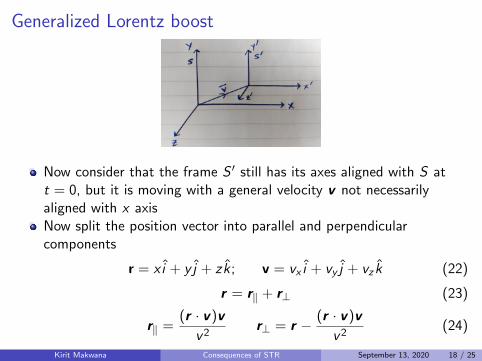
Generalized Lorentz boost
Now consider that the frame S ′ still has its axes aligned with S att = 0, but it is moving with a general velocity v not necessarilyaligned with x axisNow split the position vector into parallel and perpendicularcomponents
r = x i + y j + zk ; v = vx i + vy j + vz k (22)
r = r‖ + r⊥ (23)
r‖ =(r · v)v
v2r⊥ = r − (r · v)v
v2(24)
Kirit Makwana Consequences of STR September 13, 2020 18 / 25
Generalized Lorentz boost
Now the parallel component will act like the x component earlier, andthe perpendicular component will be the the y and z as before
r ′‖ = γ(r‖ − v t), r ′⊥ = r⊥ (25)
t ′ = γ
(t − v
c2r‖
)= γ
(t − v · r
c2
)(26)
=⇒ r ′ = r ′‖ + r ′⊥ (27)
= γ
(r · vv2
v − v t)
+ r − (r · v)
v2v (28)
= r − v t +(γ − 1)v
v2
(r · v − v2t
)(29)
The inverse transform will involve replacing v with −v
Kirit Makwana Consequences of STR September 13, 2020 19 / 25
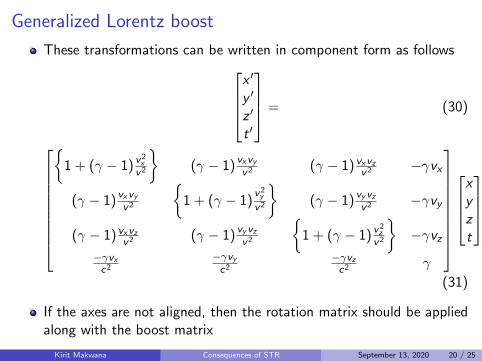
Generalized Lorentz boost
These transformations can be written in component form as followsx ′
y ′
z ′
t ′
= (30)
{1 + (γ − 1) v
2xv2
}(γ − 1)
vxvyv2 (γ − 1) vxvz
v2 −γvx
(γ − 1)vxvyv2
{1 + (γ − 1)
v2y
v2
}(γ − 1)
vyvzv2 −γvy
(γ − 1) vxvzv2 (γ − 1)
vyvzv2
{1 + (γ − 1) v
2zv2
}−γvz
−γvxc2
−γvyc2
−γvzc2
γ
xyzt
(31)
If the axes are not aligned, then the rotation matrix should be appliedalong with the boost matrix
Kirit Makwana Consequences of STR September 13, 2020 20 / 25

HW problems
Kirit Makwana Consequences of STR September 13, 2020 21 / 25
Solutions
Kirit Makwana Consequences of STR September 13, 2020 22 / 25
Solutions
6. (a) Th relative velocity of the rod in the rest frame, of the particl is :btained by the law of addition of velocities [Eq. (2.32)]: e
Vrel = [(0.4 + 0.8)c]/(1 + 0.4 X 0.8) ::= 0.909c
(b) According to the observer in the S frame, the relative velocity between the particle and the rod is (0.4 + 0.8)c = 1.2c. Since c = 3 x 108 mis, the time taken by the particle to cross the rod according to the observer in the S frame will be
3.6 10-8 -----s= s. (1.2 X 3 X 108
)
Since the length of the rod in the S frame is 3.6 m and it is moving with velocity 0.4c relative to the S-frame, it is not the proper length of the rod. · The proper length R, 0 is related to its apparent length by
or
3.6 = f o [1 - (0.4)2]½
£0 = 3.93 m
In the rest frame of the rod, the particle moves with a velocity 909c in the negative direction of the x-axis.
Hence, in the rest frame of the rod, the time taken by the particle to cross it will be
(3.93 )/(0.909 X 3 X 108) S = 1.44 X 10-8 S
(c) In the rest frame of th t· 1 d ill b O 909
. e par 1c e, the relative velocity of the ro w e . c 1n th · · · . · this frame h e pos1t1ve direction of the x-axis. However, in
' t e apparent length of the rod will be R = R0 [1 - (0 909)2]112
. = 3.93 X 0.41 = 1.61 m Hence, the requir ed tim . . . .
· e in the r est frame of the particle 18
(1.6 1)/(0.909 X 3 X 108) -. - S - 5.9 X 10-9 S 7. (a) The velor.1 t.v r.f 1-: .,.,..L-t .
Kirit Makwana Consequences of STR September 13, 2020 23 / 25
HW
Kirit Makwana Consequences of STR September 13, 2020 24 / 25
HW
Kirit Makwana Consequences of STR September 13, 2020 25 / 25