Chapter 1 Introduction
Its the age of modernization. The era where everything comes
under the notion The smaller, The better. The general trend as we
see in development of technology is that, the size of electronics
products have been reducing with time. This means that in time to
come , we might witness the big sized products of today to reduce
to the size of an small notebook.
Major advancement in electronics is done by replacing the cables
and wires as far as possible in the entire system. Such an
application has resulted microwave technologies and radio
technologies to enter into the system. One sub-genre of these
technologies is Bluetooth. Bluetoothis a
proprietaryopenwirelesstechnology standard for exchanging data over
short distances from fixed and mobile devices, creatingpersonal
area networks(PANs) with high levels of security.
The Advent of Bluetooth technology has made a revolution in
electronic industry. With this, many wireless products have been
available in market that has flocked masses to the market for these
products.
There are many advantages of using Bluetooth wireless
technology. The most important is the fact that any two devices can
be connected with each other without the use of any cables or
wires. Added to that, is that using Bluetooth devices is very safe
and also convenient. Presently, Bluetooth devices are coming very
inexpensive and hence attracting many customers. The Fact that it
eliminates the use of wires for communication, we can move our
equipment anywhere we want and can still retain the
transmission.
What we intend to do in our project is that we will use
Bluetooth technology to manage and control devices. The devices can
range from anything be it indoor or outdoors. We will manage
devices placed at remote locations and a remote in our hand to
control the working of these devices without having moving up to
the device.
We also intend to use a touch screen remote as an integral part
of our project so as to enhance the flexibility of the remote
control. As we know that, touch screen devices are much easier to
use and very much attractive, this part of our project will give it
a unique dimension. Since the project is open to the type and
number of device it can control, it will serve has a single unit to
integrate Bluetooth technology with the input via a touch
screen.
1.1 KEY FEATURES:
Bluetooth Communication
Operated wirelessly
Touch Screen Remote Input
Compact size
Chapter 2
Hardware
2.1 Hardware Components Used:
AT89S52 MICROCONTROLLER
BLUETOOTH MODULES ( Tx Rx )
4 WIRE RESISTIVE TOUCH-SCREEN
16 x 2 LCD MATRIX
ANALOG DIGITAL CONVERTER : 0848
2.2 MICROCONTROLLER:
[1] Microcontroller, as the name suggests, are small
controllers. They are like single chip computers that are often
embedded into other systems to function as processing/controlling
unit. For example, the remote control you are using probably has
microcontrollers inside that do decoding and other controlling
functions. They are also used in automobiles, washing machines,
microwave ovens, toys ... etc, where automation is needed.
2.2.1 Description
The 8051 family of microcontrollers is based on an architecture
which is highly optimized for embedded control systems. It is used
in a wide variety of applications from military equipment to
automobiles to the keyboard.SecondonlytotheMotorola68HC11in eight
bit processors sales, the 8051 family of microcontrollers is
available in a wide array of variations from manufacturers such as
Intel, Philips, and Siemens. These manufacturers have added
numerous features and peripherals to the 8051 such as I2C
interfaces, analog to digital converters, watchdog timers, and
pulse width modulated outputs. Variations of the 8051 with clock
speeds up to 40MHz and voltage requirements down to 1.5 volts are
available. This wide range of parts based on core makes the 8051
family an excellent choice as the base architecture for a company's
entire line of products since it can perform many functions and
developers will only have to learn this one platform.
The AT89S52 is a low-power, high-performance CMOS8-bit
microcontroller r with 8K bytes of in-system programmable Flash
memory. The device is manufactured using Atmels high-density non
volatile memory technology and is compatible with the industry-
standard 80C51 instructions and pin out. The on-chip Flash allows
the program memory to be reprogrammed in-system or by a
conventional non volatile memory programmer. By combining a
versatile 8-bit CPU within-system programmable Flash on a
monolithic chip, the Atmel AT89S52 is a powerful microcontroller
which provides a highly-flexible and cost- effective solution to
many embedded control applications. In addition, the AT89S52 is
designed with static logic for operation down to zero frequency and
supports two software selectable power saving modes. The Idle Mode
stops the CPU while allowing the RAM, timer/counters, serial port,
and interrupt system to continue functioning. The Power-down mode
saves the RAM con-tents but freezes the oscillator, disabling all
other chip functions until the next interrupt or hardware
reset.
2.2.2 Features
The basic architecture of AT89S52consistsof the following
features:
CompatiblewithMCS-51Products
8KBytesofIn-SystemProgrammable(ISP)Flash Memory
4.0Vto 5.5VOperatingRange
FullyStaticOperation:0Hzto33MHz
256x8-bitInternalRAM
32ProgrammableI/O Lines
Three16-bitTimer/Counters
Eight Interrupt Sources
Full Duplex UART Serial Channel
Low-power Idle and Power-down Modes
Interrupt Recovery from Power-down Mode
Watchdog Timer
Fast Programming Time
Flexible ISP Programming (Byte and Page Mode)
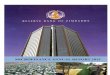
[2]Fig. 2.1 Pin diagram of AT89S52
2.2.4 Block Diagram
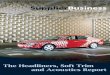
[3]Fig. 2.2 Block diagram of the microcontroller
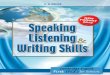
[4]Figure 2.3: Microcontroller and its different subunits
2.2.5 Pin Description
Port0:Port0isan8-bitopendrainbidirectionalI/Oport.Asanoutputport,eachpin
cansinkeightTTLinputs.When1s arewrittentoport0 pins, the pins can
be used as high-impedance inputs.Port0 can also be configured to be
the multiplexed low-order address/ data bus during accesses to
external program and data memory. In this mode, P0 has internal
pull-ups.
Port1:Port1is an 8-bit bidirectional I/O port with internal
pull-ups. The Port1 output buffers can sink / source four TTL
inputs. When1s are written to Port1 pins, they are pulled high by
the internal pull-ups and can be used as inputs. As inputs,
Port
1 pins that are externally being pulled low will source current
(IIL) because of the internal pull-ups. In addition, P1.0 and P1.1
can be configured to be the timer/counter
2 external count input (P1.0/T2) and the timer/counter2 trigger
input(P1.1/T2EX), respectively, as shown in the following
table.
Port2: Port2 is an 8-bit bidirectional I/O port with internal
pull-ups.ThePort2 output buffers can sink/ source four TTL
inputs.When1s are written to Port2 pins, they are pulled high by
the internal pull-ups and can be used as inputs. As inputs,
Port
Pins that are externally being pulled low will source
current(IIL) because of the internal pull-ups. Port 2emits the
high-order address byte during fetches from external program memory
and during accesses to external data memory that use16- bit
addresses (MOVX@ DPTR). In this application, Port2 uses strong
internal pull- ups when emitting 1s. During accesses to external
data memory that uses 8-bit addresses (MOVX @ RI), Port 2emits the
contents of the P2 Special Function register.
Port3:Port3 is an 8-bit bidirectional I/O port with internal
pull-ups.ThePort3 output buffers can sink/source four TTL inputs.
When 1s are written to Port3 pins, they are pulled high by the
internal pull-ups and can be used as inputs. As inputs, Port3 pins
that are externally being pulled low will source current(IIL)
because of the pull-ups. Port3 receives some control signals for
Flash programming an verification. Port3 also serves the functions
of various special features of the AT89S52,as shown in the
following table.
2.3 Bluetooth
[5]Bluetoothis a proprietaryopenwirelesstechnology standard for
exchanging data over short distances (using short wavelength radio
transmissions) from fixed and mobile devices, creatingpersonal area
networks(PANs) with high levels of security. Created by telecoms
vendorEricssonin 1994,it was originally conceived as a wireless
alternative toRS-232data cables. It can connect several devices,
overcoming problems of synchronization.
Bluetooth is managed by theBluetooth Special Interest Group,
which has more than 14,000 member companies in the areas of
telecommunication, computing, networking, and consumer
electronics.The SIG oversees the development of the specification,
manages the qualification program, and protects the trademarks.To
be marketed as a Bluetooth device, it must bequalifiedto standards
defined by the SIG. A network of patents are required to implement
the technology and are only licensed to those qualifying devices;
thus the protocol, whilst open, may be regarded as proprietary.
Implementation
Bluetooth uses a radio technology calledfrequency-hopping spread
spectrum, which chops up the data being sent and transmits chunks
of it on up to 79 bands (1MHz each; centered from 2402 to 2480MHz)
in the range 2,400-2,483.5MHz (allowing for guard bands). This
range is in the globally unlicensed Industrial, Scientific and
Medical (ISM) 2.4GHz short-rangeradio frequencyband.
OriginallyGaussian frequency-shift keying(GFSK) modulation was
the only modulation scheme available; subsequently, since the
introduction of Bluetooth 2.0+EDR, /4-DQPSKand 8DPSK modulation may
also be used between compatible devices. Devices functioning with
GFSK are said to be operating in basic rate (BR) mode where an
instantaneousdata rateof 1Mbit/sis possible. The term Enhanced Data
Rate (EDR) is used to describe /4-DPSK and 8DPSK schemes, each
giving 2 and 3 Mbit/s respectively. The combination of these (BR
and EDR) modes in Bluetooth radio technology is classified as a
"BR/EDR radio".
Bluetooth is apacket-based protocolwith amaster-slave structure.
One master may communicate with up to 7 slaves in apico net; all
devices share the master's clock. Packet exchange is based on the
basic clock, defined by the master, which ticks at 312.5 s
intervals. Two clock ticks make up a slot of 625 s; two slots make
up a slot pair of 1250 s. In the simple case of single-slot packets
the master transmits in even slots and receives in odd slots; the
slave, conversely, receives in even slots and transmits in odd
slots. Packets may be 1, 3 or 5 slots long but in all cases the
master transmit will begin in even slots and the slave transmit in
odd slots.
[6]Fig 2.4BlueTooth Tranciever
2.3.1 Communication and Connection
A master Bluetooth device can communicate with up to seven
devices in apiconet. (An ad-hoc computer network using Bluetooth
technology) The devices can switch roles, by agreement, and the
slave can become the master at any time.
At any given time, data can be transferred between the master
and one other device (except for the little-used broadcast mode).
The master chooses which slave device to address; typically, it
switches rapidly from one device to another in
around-robinfashion.
The Bluetooth Core Specification provides for the connection of
two or more piconets to form ascatternet, in which certain devices
serve as bridges, simultaneously playing the master role in one
piconet and the slave role in another.
Many USB Bluetoothadaptersor "dongles" are available, some of
which also include anIrDAadapter. Older (pre-2003) Bluetooth
dongles, however, have limited capabilities, offering only the
Bluetooth Enumerator and a less-powerful Bluetooth Radio
incarnation. Such devices can link computers with Bluetooth with a
distance of 100 meters, but they do not offer as many services as
modern adapters do.
[7]Fig 2.5BlueTooth Tranciever
2.4 Resistive Touch Screen
[8]Resistive touch screensaretouch-sensitivecomputer
displayscomposed of two flexible sheets coated with a resistive
material and separated by an air gap or microdots. When contact is
made to the surface of the touch screen, the two sheets are pressed
together. On these two sheets there are horizontal and vertical
lines that when pushed together, register the precise location of
the touch. Because the touch screen senses input from contact with
nearly any object (finger, stylus/pen, palm) resistive touch
screens are a type of "passive" technology.
For example, during operation of a four-wire touch screen, a
uniform, unidirectional voltage gradient is applied to the first
sheet. When the two sheets are pressed together, the second sheet
measures the voltage as distance along the first sheet, providing
the X coordinate. When this contact coordinate has been acquired,
the uniform voltage gradient is applied to the second sheet to
ascertain the Y coordinate. These operations occur within a few
milliseconds, registering the exact touch location as contact is
made.
Resistive touch screens typically have high resolution (4096 x
4096 DPI or higher), providing accurate touch control. Because the
touch screen responds to pressure on its surface, contact can be
made with a finger or any other pointing device.
Resistive touch screen technology works well with almost
anystylus-like object. In some circumstances, this is more
desirable than acapacitive touch screen, which has to be operated
with a capacitive pointer, such as a bare finger. The costs are
relatively low when compared with active touch screen
technologies]Resistive touch screen technology can be made to
supportmulti-touchinput.
Due to the nature of passive touch screen design, when "inking"
(taking handwritten notes with a stylus), the user cannot press a
large hand down on the screen while writing.This is the tradeoff
between having a dedicated implement (stylus) versus the ability to
use one's fingers as a stylus. A few modern tablets recognize both
fingers and a stylus, and avoid this problem by deactivating
recognition for non-stylus input when the stylus makes contact.
For people who must grip the active portion of the screen or
must set their entire hand down on the screen, alternative touch
screen technologies are available, such as active touch screen in
which only the stylus creates input and touches from the hand are
rejected. However, there are now newer touch screen technologies
which allow the use ofmulti-touchwithout the aforementioned
vectoring issues
[9]Fig 2.64-Wire Touch Screen
2.3.1 Theory of operation - analog resistive touch screens
Usually a resistive touch screen consists of at least three
layers: A flexible membrane made from PET film is suspended over a
rigid substrate made from glass or acryl (see Figure 2-1). Both
surfaces are coated with a transparent conductive film like ITO
(Indium tin oxide). The conductive ITO layers are kept apart by an
insulting spacer along the edges, and by spacer dots on the inner
surface of the two ITO layers. In this way there will be no
electrical connection unless pressure is applied to the top sheet
(PET film).
4-wire touch screens use a single pair of electrodes (Bus bars)
on each ITO layer The bus bars in the top sheet and substrate are
perpendicular to each other. The bus bars are connected to the
touch screen controller through a 4-wire flex cable. The 4 wires
are referred as X+ (left), X- (right), Y+ (top) and Y- (bottom). An
advantage of the 4-wire touch screens is that it is possible to
determine the touch pressure by measuring the contact resistance (R
Touch) between the two ITO layers.
R Touch decreases as the touch pressure (or the size of the
depressed area) increases. This characteristic can be useful in
applications in which it is not only required to detect where the
pressure is applied, but also the type of pressure (area and
force).
8091A-AVR-07/07 AVR341
Electrodes in 4- and 5- wire touch screens.5-wire touch screens
have circular electrodes. Since all of them reside in the substrate
ITO there is a need for linearization pattern (conductive) to make
an applied voltage gradient uniform.
4 wires connect to the electrodes these are referred to as UL
(Upper Left), UR (Upper Right), LL (Lower Left), LR (Lower Right).
The fifth wire is used for sensing the electrode voltage and is
referred to as the sense wire. The sense wire is embedded in the
top sheet. The advantage of the 5-wire touch screen type is that
the ITO coating on the top sheet is not required to be perfect.
This means that physical wearing of the 5-wire touch screens is
less critical than for 4-wire touch screens.
2.5 LCD(Liquid Crystal Display)
[10]Frequently, an 8051 program must interact with the outside
world using input and output devices that communicate directly with
a human being. One of the most common devices attached to an 8051
is an LCD display. Some of the most common LCDs connected to the
8051 are 16x2 and 20x2 displays. This means 16 characters per line
by 2 lines and 20 characters per line by 2 lines, respectively.
Fortunately, a very popular standard exists which allows us to
communicate with the vast majority of LCDs regardless of their
manufacturer. The standard is referred to as HD44780U, which refers
to the controller chip which receives data from an external source
(in this case, the 8051) and communicates directly with the
LCD.
2.5.1 44780 BACKGROUND
The 44780 standard requires 3 control lines as well as either 4
or 8 I/O lines for the data bus. The user may select whether the
LCD is to operate with a 4-bit data bus or an 8-bit data bus. If a
4-bit data bus is used the LCD will require a total of 7 data lines
(3 control lines plus the 4 lines for the data bus). If an 8-bit
data bus is used the LCD will require a total of 11 data lines (3
control lines plus the 8 lines for the data bus).
The three control lines are referred to as EN, RS, and RW.
The EN line is called "Enable." This control line is used to
tell the LCD that you are sending it data. To send data to the LCD,
your program should make sure this line is low (0) and then set the
other two control lines and/or put data on the data bus. When the
other lines are completely ready, bring EN high (1) and wait for
the minimum amount of time required by the LCD datasheet (this
varies from LCD to LCD), and end by bringing it low (0) again.
The RS line is the "Register Select" line. When RS is low (0),
the data is to be treated as a command or special instruction (such
as clear screen, position cursor, etc.). When RS is high (1), the
data being sent is text data which should be displayed on the
screen. For example, to display the letter "T" on the screen you
would set RS high.
The RW line is the "Read/Write" control line. When RW is low
(0), the information on the data bus is being written to the LCD.
When RW is high (1), the program is effectively querying (or
reading) the LCD. Only one instruction ("Get LCD status") is a read
command. All others are write commands--so RW will almost always be
low.
Finally, the data bus consists of 4 or 8 lines (depending on the
mode of operation selected by the user). In the case of an 8-bit
data bus, the lines are referred to as DB0, DB1, DB2, DB3, DB4,
DB5, DB6, and DB7.
As we've mentioned, the LCD requires either 8 or 11 I/O lines to
communicate with. For the sake of this tutorial, we are going to
use an 8-bit data bus--so we'll be using 11 of the 8051's I/O pins
to interface with the LCD.
Let's draw a sample pseudo-schematic of how the LCD will be
connected to the 8051.
[11]Fig 2.7LCD-Microcontroller Interfacing
As you can see, we've established a 1-to-1 relation between a
pin on the 8051 and a line on the 44780 LCD. Thus as we write our
assembly program to access the LCD, we are going to equate
constants to the 8051 ports so that we can refer to the lines by
their 44780 name as opposed to P0.1, P0.2, etc. Let's go ahead and
write our initial equates:
DB0 EQU P1.0DB1 EQU P1.1DB2 EQU P1.2DB3 EQU P1.3DB4 EQU P1.4DB5
EQU P1.5DB6 EQU P1.6DB7 EQU P1.7EN EQU P3.7RS EQU P3.6RW EQU
P3.5DATA EQU P1
Having established the above equates, we may now refer to our
I/O lines by their 44780 name. For example, to set the RW line high
(1), we can execute the following instruction:
SETB RW
2.5.2 HANDLING THE EN CONTROL LINE
As we mentioned above, the EN line is used to tell the LCD that
you are ready for it to execute an instruction that you've prepared
on the data bus and on the other control lines. Note that the EN
line must be raised/lowered before/after each instruction sent to
the LCD regardless of whether that instruction is read or write,
text or instruction. In short, you must always manipulate EN when
communicating with the LCD. EN is the LCD's way of knowing that you
are talking to it. If you don't raise/lower EN, the LCD doesn't
know you're talking to it on the other lines.
Thus, before we interact in any way with the LCD we will always
bring the EN line low with the following instruction:
CLR EN
And once we've finished setting up our instruction with the
other control lines and data bus lines, we'll always bring this
line high:
SETB EN
The line must be left high for the amount of time required by
the LCD as specified in its datasheet. This is normally on the
order of about 250 nanoseconds, but check the datasheet. In the
case of a typical 8051 running at 12 MHz, an instruction requires
1.08 microseconds to execute so the EN line can be brought low the
very next instruction. However, faster microcontrollers (such as
the DS89C420 which executes an instruction in 90 nanoseconds given
an 11.0592 MHz crystal) will require a number of NOPs to create a
delay while EN is held high. The number of NOPs that must be
inserted depends on the microcontroller you are using and the
crystal you have selected.
The instruction is executed by the LCD at the moment the EN line
is brought low with a final CLR EN instruction.
Programming Tip: The LCD interprets and executes our command at
the instant the EN line is brought low. If you never bring EN low,
your instruction will never be executed. Additionally, when you
bring EN low and the LCD executes your instruction, it requires a
certain amount of time to execute the command. The time it requires
to execute an instruction depends on the instruction and the speed
of the crystal which is attached to the 44780's oscillator
input.
2.5.3 CHECKING THE BUSY STATUS OF THE LCD
As previously mentioned, it takes a certain amount of time for
each instruction to be executed by the LCD. The delay varies
depending on the frequency of the crystal attached to the
oscillator input of the 44780 as well as the instruction which is
being executed.
While it is possible to write code that waits for a specific
amount of time to allow the LCD to execute instructions, this
method of "waiting" is not very flexible. If the crystal frequency
is changed, the software will need to be modified. Additionally, if
the LCD itself is changed for another LCD which, although 44780
compatible, requires more time to perform its operations, the
program will not work until it is properly modified.
A more robust method of programming is to use the "Get LCD
Status" command to determine whether the LCD is still busy
executing the last instruction received.
The "Get LCD Status" command will return to us two tidbits of
information; the information that is useful to us right now is
found in DB7. In summary, when we issue the "Get LCD Status"
command the LCD will immediately raise DB7 if it's still busy
executing a command or lower DB7 to indicate that the LCD is no
longer occupied. Thus our program can query the LCD until DB7 goes
low, indicating the LCD is no longer busy. At that point we are
free to continue and send the next command.
2.6 RELAYS
There are a variety of devices which are classed as output
devices and are therefore commonly called Actuators. Actuators
convert an electrical signal into a corresponding physical quantity
such as movement, force, sound etc. Actuators can also be
considered as either Binary or Continuous devices based upon the
number of stable states their output has. For example, A relay is a
Binary Actuator as it has two stable states, latched and unlatched
while a motor is a Continuous Actuator. The most common types of
actuators or output devices are Relays, Lights, Motors and
Loudspeakers and in this tutorial we will look at a
Electromechanical Relays and Solid State Relays.
2.6.1 Basic Operation
[12]Fig 2.8 Relay
We have two sets of electrically conductive contacts. One pair
which are classed as Normally Open, (NO) or make contacts and
another set which are classed as Normally Closed, (NC) or break
contacts. These terms "Normally Open, Normally Closed" or "Make and
Break Contacts" refer to the state of the electrical contacts when
the relay coil is "de-energized", i.e, no supply voltage connected
to the coil. An example of this arrangement is given below.
The relays contacts are electrically conductive pieces of metal
which touch together completing a circuit and allow the circuit
current to flow, just like a switch. When the contacts are open the
resistance between the contacts is very high in the Mega-Ohms,
producing an open circuit and no circuit current flows. When the
contacts are closed the contact resistance should be zero a short
circuit, but this is not the case. All relay contacts have a
certain amount of "contact resistance" when they are closed and
this is called the "On-Resistance". With a new relay and contacts
this on-resistance will be very small, generally less than 0.2's
because the tips are new and clean.
For example, if the contacts are passing a load current of say
10A, then the voltage drop across the contacts using Ohms Law is
0.2 x 10 = 2 volts. As the contact tips begin to wear, and if they
are not properly protected from high inductive or capacitive loads,
they will start to show signs of arcing damage as the circuit
current still wants to flow as the contacts open. This arcing or
sparking will cause the contact resistance of the tips to increase
as the contact tips become damaged. If allowed to continue the
contact tips may become so burnt and damaged to the point were they
are physically closed but do not pass any or very little
current.
2.6.2 Relay Contact Types
As well as the standard descriptions of Normally Open, (NO) and
Normally Closed, (NC) used to describe how the relays contacts are
connected, relay contact arrangements can also be classed by their
actions. Electromechanical relays are made up of one or more
individual switches with each "switch" being referred to as a Pole.
Each one of these switches or poles can be connected or "thrown"
together by energizing the relays coil and this gives rise to the
description of the contact types as:
SPST - Single Pole Single Throw
SPDT - Single Pole Double Throw
DPST - Double Pole Single Throw
DPDT - Double Pole Double Throw
2.7 Working of the Hardware
1. Master Module
On Power on, the Bluetooth module is configured to be in command
mode and automatically connects to the Slave module via the
Bluetooth link. The commands are issued stored in the
Microcontroller.
On being connected the L.C.D. shows Connected and a blue LED
blinks for 5 times.
The Four wire Resistive touch-screen is interfaced with
Microcontroller via Analog to Digital Converter 0848 (A.D.C.). When
an area on the screen is pressed, the corresponding voltage values
are fed to the ADC which converts them into 8 bit digital data.
The 8-bit digital data is fed to a Port of Microcontroller. The
Microcontroller decodes the data and sends a corresponding data
serially to the Bluetooth device connected at Pin 11 and 12.
This data is transmitted to the slave module and accordingly it
responds.
2. Working of Slave Module
On Power On, the Slave Bluetooth module is configured to be in
command mode and connects to the master Bluetooth module upon
receiving commands from the Microcontroller.
After being connected, it receives data from the Master Module,
which sends it to Microcontroller via UART.
The controller decodes the data and then it performs the
required action based on the Data received.
If the data Sent is 1 0 , then Electric Bulb connected via Relay
at Pin 3.6 will glow.
If the data Sent is 0 1 , then Electric Bulb connected via Relay
at Pin 3.7 will glow.
If the data Sent is 0 0 , then both the Electric Bulbs will not
glow.
The function of Relay is to switch the power supply from AC
Mains to the Electric bulb.
3.
Chapter 3
Software
[13]Connecting hardware according to the circuit diagram doesnt
work really. You need to program the components accordingly so as
to work according to the algorithm you have designed in order to
make the project work properly as required. Following is the
description of software used.
3.1 Cx51 Compiler
The C programming language is a general-purpose programming
language that provides code efficiency, elements of structured
programming, and a rich set of operators. C is not a big language
and is not designed for any one particular area of application. Its
generality combined with its absence of restrictions, makes C a
convenient and effective programming solution for a wide variety of
software tasks. Many applications can be solved more easily and
efficiently with C than with other more specialized languages.
The Cx51 Optimizing C Compiler is a complete implementation of
the American National Standards Institute (ANSI) standard for the C
language. The Cx51 Compiler is not a universal C compiler adapted
for the 8051 target. It is a ground-up implementation, dedicated to
generating extremely fast and compact code for the 8051
microprocessor. The Cx51 Compiler provides you with the flexibility
of programming in C and the code efficiency and speed of assembly
language.
Since the Cx51 Compiler is a cross compiler, some aspects of the
C programming language and standard libraries are altered or
enhanced to address the peculiarities of an embedded target
processor.
The Keil C51 C Compiler for the 8051 microcontroller is the most
popular 8051 C compiler in the world. It provides more features
than any other 8051 C compiler available today.
The C51 Compiler allows you to write 8051 microcontroller
applications in C that, once compiled, have the efficiency and
speed of assembly language. Language extensions in the C51 Compiler
give you full access to all resources of the 8051.
The C51 Compiler translates C source files into relocatable
object modules which contain full symbolic information for
debugging with the Vision Debugger or an in-circuit emulator. In
addition to the object file, the compiler generates a listing file
which may optionally include symbol table and cross reference
information.
3.1.1 Features
Nine basic data types, including 32-bit IEEE floating-point,
Flexible variable allocation with bit, data, b data, I data, x
data, and p data memory types,
Interrupt functions may be written in C,
Full use of the 8051 register banks,
Complete symbol and type information for source-level
debugging,
Use of AJMP and ACALL instructions,
Bit-addressable data objects,
Built-in interface for the RTX51 Real-Time Kernel,
Support for dual data pointers on Atmel, AMD, Cypress, Dallas
Semiconductor, Infineon, Philips, and Triscend
microcontrollers,
Support for the Philips 8xC750, 8xC751, and 8xC752 limited
instruction sets,
Support for the Infineon 80C517 arithmetic unit.
The 8051 Family is one of the fastest growing Microcontroller
Architectures. More than 500 device variants from various silicon
vendors are available today. New extended 8051 devices, like the
Philips 80C51MX architecture, are dedicated for large applications
with several megabytes of code and data space.
For optimum support of these different 8051 variants, Keil
provides several development tools that are listed in the table
below. A new output file format (OMF2) allows direct support of up
to 16MB code and data space. The CX51 Compiler is a variant of the
C51 compiler that is designed for the new Philips 80C51MX
architecture.
3.2 KEILSOFTWARE
Keil Micro Vision is an integrated development environment used
to create software to be run on embedded systems(like a
microcontroller).It allows for such software to be written either
in assembly or C programming languages and for that software to be
simulated on a computer be fore being loaded on to the
microcontroller.
3.2.1 Vision3
Vision3is an IDE (Integrated Development Environment)that helps
write, compile, and debug embedded programs. It encapsulates the
following components:
A project manager.
A make facility.
Tool configuration.
Editor.
A powerful debugger.
Chapter 4
List of References
[1]
Muhammad Ali Mazidi , Janice Gillispie Mazidi, Rolin D.
Mckinlay.
Second edition, THE 8051 MICROCONTROLLER AND EMBEDDED SYSTEM
Chapter 2: The 8051 Microcontrollers, Page Number: 19 25
Chapter 9 : Using Timers
Chapter 10 : Serial port programming
Chapter 12 : LCD programming
Chapter 13 : Using ADC 0848 and its programming
[2]
http://www.ikalogic.com/tut_8051_1_.php
[3]
http://microcontroller51.blogspot.com/2010/08/microcontrollers.html
[4]
http://www.mikroe.com/eng/chapters/view/14/chapter-1-world-of-microcontrollers/
[5]
http://www.nskelectronics.in/files/aubtm-20_v12.pdf
[6]
http://www.8051projects.info/forum/tags/interface%20bluetooth%20with%208051%20microcontroller.html
[7]
http://www.afiata.com/search/bluetooth+transmitter+circuit
[8]
http://www.nskelectronics.in/touch_screen.html
[9]
http://www.nskelectronics.in/_ds_touch_screen.html
[10]
http://www.multyremotes.com/lcd-interfacing.htm
[11]
http://knol.google.com/k/interfacing-an-lcd-to-8051-microcontroller-lcd-programming
[12]
http://www.classictruckshop.com/clubs/earlyburbs/projects/bosch/relay.htm
[13]
http://www.keil.com/appnotes
Chapter 5
Limitations
&
Future
Limitations
The Range of Bluetooth Transmitter Receiver is limited.
The number of devices that can be connected and controlled
cannot exceed 30
Touch Screen is sensitive and susceptible to get damaged
easily.
Future Scope
A fully functional touch screen operated system can be built
that would be able to control any number of devices.
The range of the device can be enhanced.
Voice controlled system can also be incorporated in the already
existing mechanism.
Appendix
Annexure: A
Block Diagram
Annexure: B
Schematic
Annexure: C
Source Code
#include
sbit REL1=P1^0;
sbit REL2=P1^1;
unsigned char x1,k;
unsigned int i,j;
void data_tx(unsigned char);
unsigned char data_rx(unsigned char);
unsigned char buff[6];
unsigned char buff2[28];
unsigned char slave_1[]={'L','L','L'};
unsigned char
slave_2[]={13,10,'A','T','+','B','D','I','S','C','M','O','D','E','=','3',',','0',13,10};
unsigned char slave_ok[]={'@','@','@'};
void delay(int x)
{
unsigned int i,j;
for(i=0;i