Embed Size (px)
Citation preview

Continuous ControlContinuous ControlMAE 443/543MAE 443/543

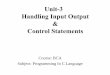
Closed Loop Control system Closed Loop Control system
ControllerProcess(Plant)
Sensor
Controlinput
OutputReferenceInput
+
-

Positive vs Negative Feedback StoryPositive vs Negative Feedback Story
“The distinction between the stabilizing and destabilizing character of negative and positive feedback loops is neatly captured in the story of the misconnected electric blanket. The newlyweds were given an electric blanket for their queen-size double bed. The blanket had separate temperature settings for the two sides of the bed, one for him and one for her. Properly connected, there should have been two separate negative feedback systems, each attempting to control the temperature of the blanket for the comfort of each individual. The story goes that the newlyweds misconnected the blanket so that his setting controlled her blanket temperature and hers controlled his. The result…was a nasty positive feedback system. She felt cold, turned up her setting, making his side too warm for him so he turned down his setting, making her even colder, so she raised her setting even further, and so on. How such a scenario would end is left up to the fertile imagination of the reader.
-Richardson, G. and Pugh, A. Introduction to System Dynamics Modeling with Dynamo, MIT Press, Cambridge, MA 1981, pp 11-12

Centrifugal GovernorCentrifugal Governorhttp://en.wikipedia.org/wiki/Centrifugal_governorhttp://en.wikipedia.org/wiki/Centrifugal_governor
Centrifugal governor, Boulton & Watt, 1798
http://en.wikipedia.org/wiki/James_Watt

The key innovation, which had no clear predecessor, was the use of wing warping to effect lateral control; that is, control for turning (Fig. 7). This innovation provided a full complement of movable aerodynamic surfaces to allow control over all three axes of rotational motion. This innovation wascritical, since it made controlled flight possible.
Feedback Control: An Invisible Thread in the History of Technology, Dennis Bernstein
IEEE Control System Magazine, April 2002
Controlled FlightControlled Flight

MagLev TrainMagLev Trainhttp://www.o-keating.com/hsr/mlx01.htmhttp://www.o-keating.com/hsr/mlx01.htm
The principal of a Magnet train is that floats on a magnetic field and is propelled by a linear induction motor. They follow guidance tracks with magnets. These trains are often referred to as Magnetically Levitated trains which is abbreviated to MagLev.
The MLX01ML stands for maglev, and X for experimental.
The Aerodynamic brakes on the MLX01

• I(t): infective class• S(t): susceptive class• R(t): removed class
• V(t): vaccinated individuals, is the vaccination rate
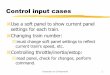
Control of EpidemicsControl of Epidemics

Control of EpidemicsControl of Epidemics
0 5 10 15 20 25 30 35 40 45 500
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
Without VaccinationWith Vaccination
Introduction to Optimal Control, (pp 17-18)
Jack Macki and Aaron Strauss
Springer-Verlag, 1982
Infe
ctiv
e C
lass
I(t
)
Time

Tuned Mass Damped (TMD)Tuned Mass Damped (TMD)http://www.oiles.co.jp/en/menshin/building/control/amd.htmlhttp://www.oiles.co.jp/en/menshin/building/control/amd.html

The human brain is immersed in a fluid (cerebrospinal fluid, CSF), which, among other things, protects the brain from mechanical stress (e.g. concussion) and helps support its weight through buoyancy. In normal situations, the production and reabsorption of this fluid are equal. However, a constant overproduction, blockage (i.e. tumor) or reabsorption difficulty can upset this natural balance, resulting in a build-up of fluid in the skull (Hydrocephalus). In adults, this excess fluid causes large pressures to develop rapidly in the skull, and impairs brain function. The most common solution today is the implantation of a passive pressure-control valve and catheter system (shunt). Once the pressure in the skull exceeds a certain critical value, the excess fluid is released through the open valve and typically drained into the stomach cavity (Fig. 1). Unfortunately, these passive valves encounter many problems, including over- and under- drainage, occlusions, and system failure. These problems may be avoided through the use of a mechatronic valve, which could monitor the patient's health and properly regulate the amount of fluid in the skull through pressure, flow and inclination sensors.
Hydrocephalus TherapyHydrocephalus Therapyhttp://www.medit.hia.rwth-aachen.de/en/research/hydrocephalus_ihttp://www.medit.hia.rwth-aachen.de/en/research/hydrocephalus_i
mplant/index.htmlmplant/index.html

Stages in Control System DesignStages in Control System Design
Modeling
Physics based model derivation
Non-Physics based modeling
System Identification
mode structure/class selection
parameter estimation
model validation
Analysis
Stability, Controllability, …
Control System Design
Performance specification
Synthesis of controller
Simulation and testing

System ModelsSystem Models
L u m pe dPa ra m e te r
D is tribu te dPa ra m e te r
D y n a m icS y s te m s
D e te rm in is t icS to ch a s t ic
C o n t in u o u sTim e
D is cre te Tim e
L in e a rNo n lin e a r
Tim eI n v a ria n t
Tim e V a ry in g

Online examplesOnline examples
http://www.engin.umich.edu/group/ctm/
http://www.mathworks.com/applications/controldesign/
http://lorien.ncl.ac.uk/ming/Dept/Swot/connotes.htm
http://www-control.eng.cam.ac.uk/extras/Virtual_Library/Control_VL.html
http://www.jhu.edu/~signals/explore/index.html

ExampleExample
For the spring-mass dashpot system
Force balance leads to the free body diagram
m
k
y
u
m
At initial time (t=0), we need the values of and to solve the differential equation which are referred to as initial conditions.

Overview of Control ApproachesOverview of Control Approaches
• Classical Control: employs primarily frequency domain tools to achieve control objectives
•MAE 443/543 (Continuous Control)
•MAE 444/544 (Digital Control)
• Modern Control: employs primarily time-domain tools
• MAE 571 (System Analysis)
• MAE 672 (Optimal Control)
• MAE 670 (Nonlinear Control)
•Post-Modern Control: integrate time-domain and frequency domain tools.

Software ToolsSoftware Tools
• MATLAB (MATrix LABoratory)
powerful numerical software package with toolboxes for control, optimization, system identification, etc.
http://www.engin.umich.edu/group/ctm/
•MAPLE (MAniPulator LanguagE)
symbolic manipulator for analytically solving algebraic, differential equation and for linear algebra besides other functionality
http://www.mapleapps.com/categories/whatsnew/html/SCCCmapletutorial.shtml
•MATLAB is now bundled with MAPLE permitting the user to exploit the strengths of both packages

Laplace TransformLaplace Transform
Let f(t) be a function of time t, such that f(t) = 0, for t < 0, then
is the Laplace transform of f(t).
s is a complex variable
Example:

Laplace TransformLaplace Transform
Example:
Example (Step function):

Laplace Transform of the Derivative of a FunctionLaplace Transform of the Derivative of a Function
Let
Consider

Laplace Transform of the Derivative of a FunctionLaplace Transform of the Derivative of a Function
Similarly

Final and Initial Value TheoremFinal and Initial Value Theorem
Consider
Since
Final Value Theorem:
If f(t) and are Laplace transformable, if F(s) is the Laplace transform of
f(t), and if exists, then

Final and Initial Value TheoremFinal and Initial Value Theorem
Initial Value Theorem:
If f(t) and are Laplace transformable, if F(s) is the Laplace transform of
f(t), and if exists, then
we have
Thus,

Inverse Laplace TransformInverse Laplace Transform
Not easy. We use table to find the Inverse Laplace Transforms
where
Partial Fraction method for Inverse Laplace TransformPartial Fraction method for Inverse Laplace TransformLet
B(s), A(s) are polynomials in s with the order of A(s) > B(s). If F(s) can be represented as
then

Example: (Distinct Poles)
We can write
where ak – residue at the pole s=pk.
Example:
Inverse Laplace TransformInverse Laplace Transform

therefore,
Example:
This has to be written as
Inverse Laplace TransformInverse Laplace Transform

therefore,
Example: (Multiple Poles)
Inverse Laplace TransformInverse Laplace Transform

Consider,
Similiarly
Inverse Laplace TransformInverse Laplace Transform

Matlab functionMatlab function
Matlab command for determining residue for the transfer function G(s) = B/A:
[R,P,K] = RESIDUE(B,A)
[R,P,K] = residue([1 2 3],[1 3 3 1])R =
1.0000 0.0000 2.0000
P =
-1.0000 -1.0000 -1.0000
K =
[]