Embed Size (px)
Citation preview
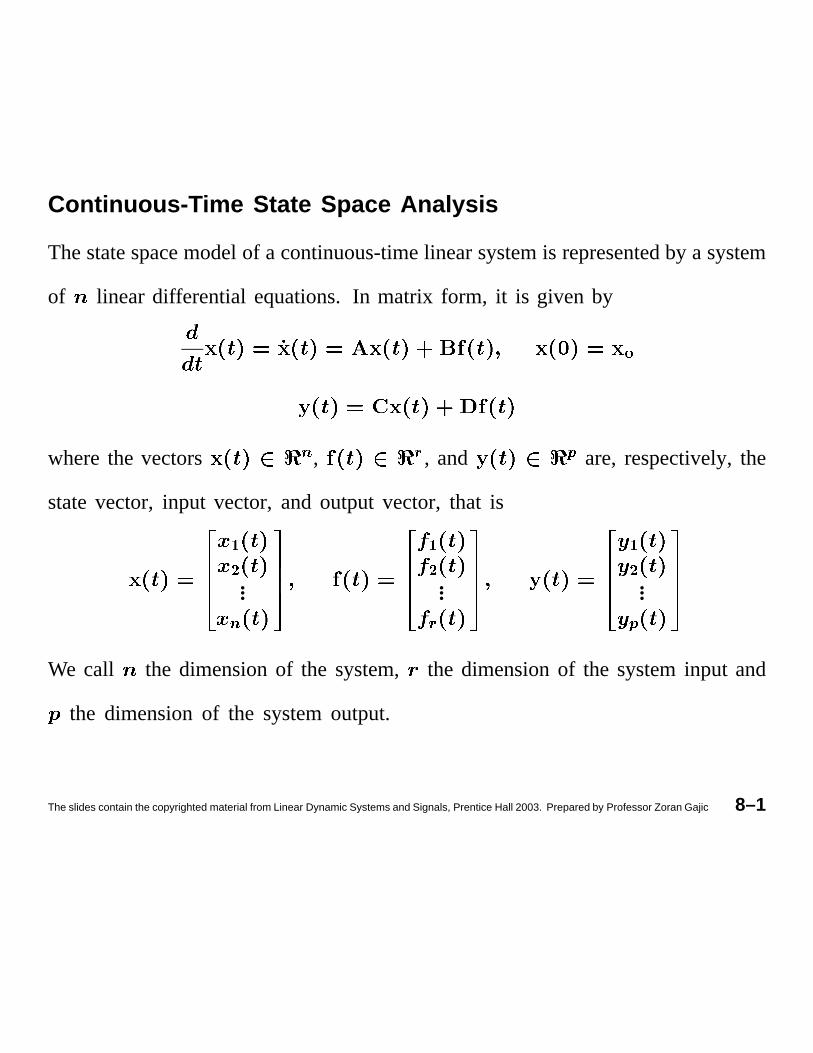
Continuous-Time State Space Analysis
Thestatespacemodelof a continuous-timelinearsystemis representedby a system
of linear differential equations.In matrix form, it is given by �wherethe vectors
�,
�, and
�are, respectively,the
statevector, input vector, and output vector, that is��...�
��...�
��...�
We call the dimensionof the system, the dimensionof the systeminput and
the dimensionof the systemoutput.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–1

The matrix����
describesthe internal behaviorof the system,while matrices����,
���, and
���representconnectionsbetweentheexternalworld andthe
system.If thereareno direct pathsbetweeninputsandoutputs,which is often the
case,the matrix ���
is zero.
Thesematricesrepresentarraysof real scalarnumbersas���� ��� ��� � ���� ��� ...... ...� � ��� ��� ��� ��� � ���� ��� ...
... ...� � ��� ��� ��� ��� � ���� ��� ...
... ... � �� ��� ��� ��� � ���� ��� ...... ... � ��
It is assumedin this book that all matricesare time invariant, which implies that
all scalars ��� ��� ����� and ��� are constant.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–2

In the next sectionwe will showhow to relatedifferentialequationsdescribing
linear dynamicalsystemsto the statespaceform, and show how to determine,in
general,scalars ��� ��� ����� ��� . In this chapter,we will encountermathematical
models of electrical networks, electrical machines,aircraft, antennas,industrial
reactors,robots,describedby statespaceforms.
Note that the statespacemodel for linear discrete-timesystemshasexactly the
sameform with the vector differential equationreplacedby the vector difference
equations � � � �In the next two exampleswe demonstratehow to obtain statespaceforms for
two standardelectricaland mechanicallinear systems.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–3

Example 8.1: Considera simple RLC electricalnetwork given in Figure 1.10
of Section 1.3, whose mathematicalmodel is representedby the second-order
differential equation,that is! " ! # !! " # !! " $In this mathematicalmodel
$representsthe systeminput and
"is the
systemoutput. Introducingthe following changeof variables# % # % !! %$% #
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–4

we obtain& ' && & ' && 'Thesedifferential equationscan be put into matrix form as'& (*),+�(.-(/-10�2 03+�(*)4(.-52(.-,0�2 '& '0�2The output equationin matrix form is given by'&The correspondingstatespacematricesfor this systemare given by
(*)6+.(.-( - 032 0�+.(*)4(.-52( - 0�2 '0�2The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–5
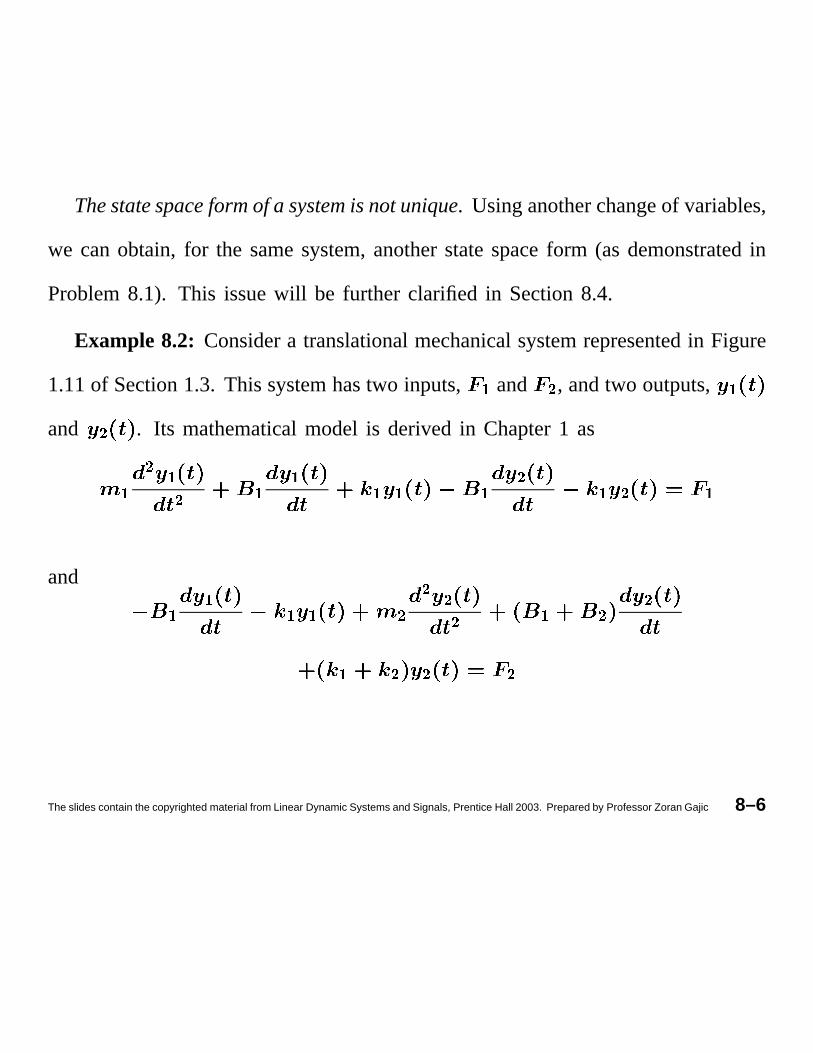
Thestatespaceformof a systemis notunique. Usinganotherchangeof variables,
we canobtain, for the samesystem,anotherstatespaceform (as demonstratedin
Problem8.1). This issuewill be further clarified in Section8.4.
Example 8.2: Considera translationalmechanicalsystemrepresentedin Figure
1.11of Section1.3. This systemhastwo inputs, 7 and 8 , andtwo outputs, 7and 8 . Its mathematicalmodel is derivedin Chapter1 as7 8 7 8 7 7 7 7 7 8 7 8 7and 7 7 7 7 8 8 8 8 7 8 8
7 8 8 8The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–6

From thesedifferentialequationsthe statespaceform canbe obtainedeasilyby
choosingthe following statespacevariables9 9 : 9 ; : < :9 9 : :
The statespaceform of this two-input two-outputsystemis given by=>>? @A�BDCFEHG@AJIKCFE�G@AML�CFE�G@A3NOCFE�GPRQQS T =>>? U V U UW X�YZ Y W\[JYZ Y X�YZ Y [�YZ YU U U VX�YZ^] [�YZ_] W X�Ya`�X ]Z_] W [JYa`3[ ]Z_]
PRQQS = >>? A�BKCFE�GAJIbC4EHGAMLcC4EHGA3NdC4EHGPRQQSfe =>>? U UBZ Y UU UU BZg]
PRQQSihkj BKC4EHGj I C4EHGmland 9: 9:;<The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–7

8.1 State Space Models
Considera general th-order model of a continuous-timelinear dynamicsystem
representedby an th-orderdifferential equationn n no*p n�o*pn�o*p p qn n n no*p no*pno*p p qWe assumethat all initial conditions for the above differential equation, i.e.o o no*p o n�o*p
, are equalto zero.
In order to derivea systematicprocedurethat transformsa differentialequation
of order to a statespaceform representinga systemof first-orderdifferential
equations,we first start with a simplified version, namely we study the casein
which no derivativeswith respectto the input are present
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–8

r r r�s*t rs*tr�s*t t uIntroducethe following (easyto remember)changeof variablestvw v v
r r�s*tr�s*twhich after taking derivativesleadsto
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–9
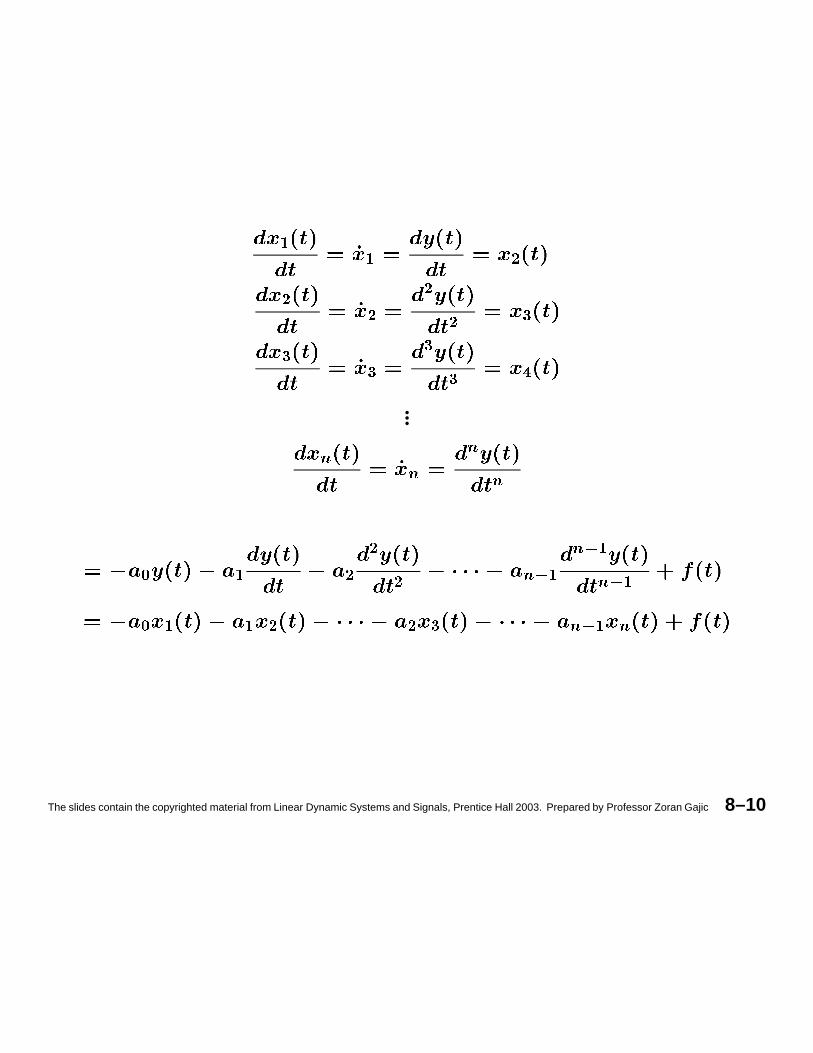
x x yy y y y zz z z z {...| | | |
} x y y y |�~ x |~ x|�~ x} x x y y z |�~ x |
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–10

The correspondingstatespaceform is�������� ����D�F�H���J�K�F���......������ � �4�H��� � �4�H�
�R������� ��������� � � � �b�b� �b�b� �� � � � �b�b� �
... ... . . . . . . . . . ...
... ...�K�b� . . . . . .
�� � �K�b� �b�b� � ������ ��� � ��� � �b�b� �b�b� ��� ��� ��R�������� ������� ����������J�b�����
...
...�3��� � �F���� � �F����R���������
�������� � � ......� ��R��������� �6���
with the correspondingoutput equationequal to � ...¡�¢ �¡
Thisstatespaceform is knownin theliteratureasthephasevariablecanonicalform.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–11
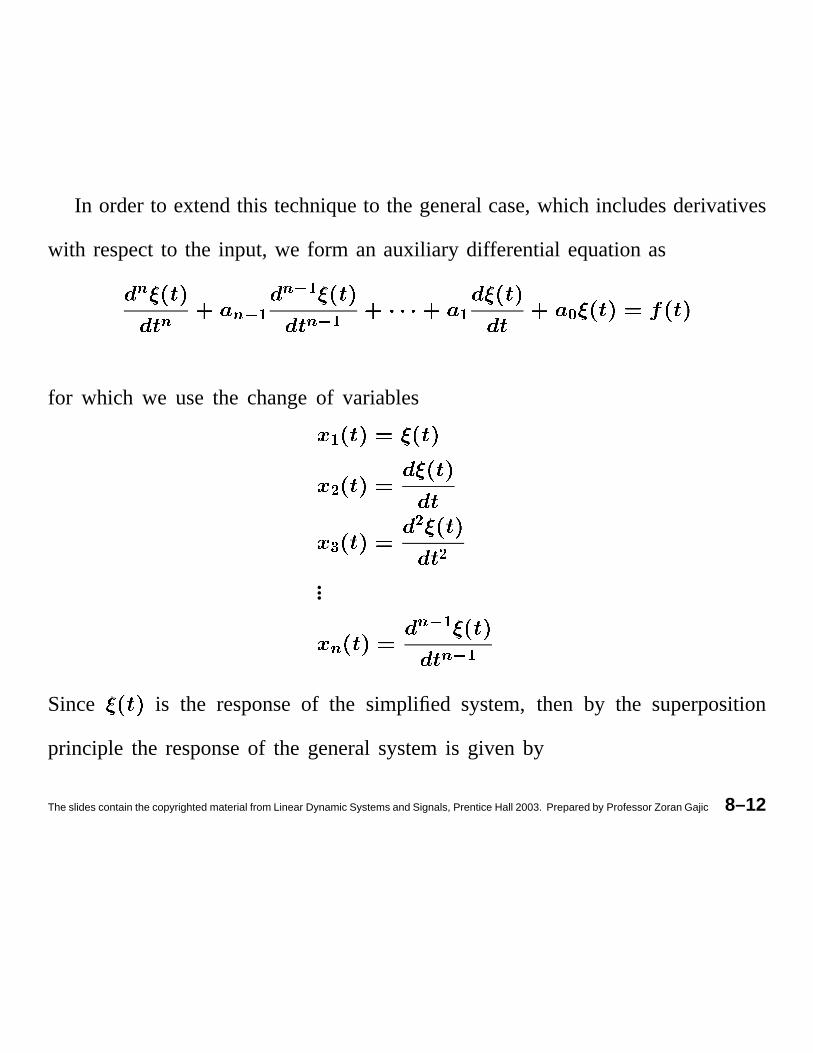
In orderto extendthis techniqueto the generalcase,which includesderivatives
with respectto the input, we form an auxiliary differential equationas£ £ £�¤*¥ £¤*¥£¤*¥ ¥ ¦for which we use the changeof variables¥§¨ § §
... £ £�¤*¥£�¤*¥Since is the responseof the simplified system, then by the superposition
principle the responseof the generalsystemis given by
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–12
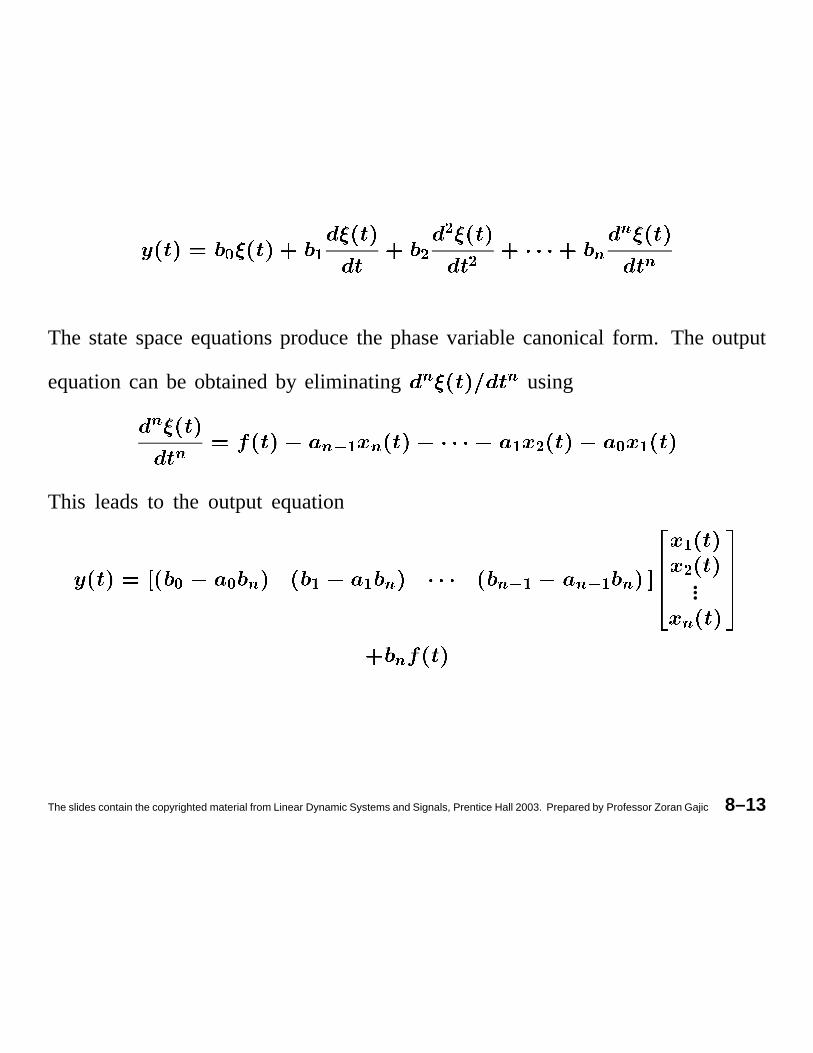
© ª « « « ¬ ¬ ¬The statespaceequationsproducethe phasevariablecanonicalform. The output
equationcan be obtainedby eliminating ¬ ¬ using¬ ¬ ¬� ª ¬ ª « © ªThis leadsto the output equation
© © ¬ ª ª ¬ ¬� ª ¬ ª ¬ ª«...¬¬
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–13

It is interestingto point out that for ® , which is almostalwaysthe case,
the output equationalsohasan easy-to-rememberform given by
¯ ° ®± ° °²...®
Example 8.3: Considera dynamicalsystemrepresentedby the following dif-
ferential equation³µ´H¶ ³¸·�¶ ³º¹�¶ ³ ² ¶ ³ ° ¶³µ»H¶ ³ ° ¶where
³µ¼k¶standsfor the th derivative,i.e.
³µ¼k¶ ¼ ¼. The state
spacemodelof the abovesystemis describedby the following matrices
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–14

Note that betweenthe system differential equation and the system transfer
function, definedby ½ ½ ½¾/¿ ½�¾*¿ ¿ À½ ½�¾*¿ ½�¾*¿ ¿ Àthereis the uniquecorrespondence.Hence,the samemethodjust describedcanbe
usedfor obtainingthe statespaceform from the systemtransferfunction.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–15
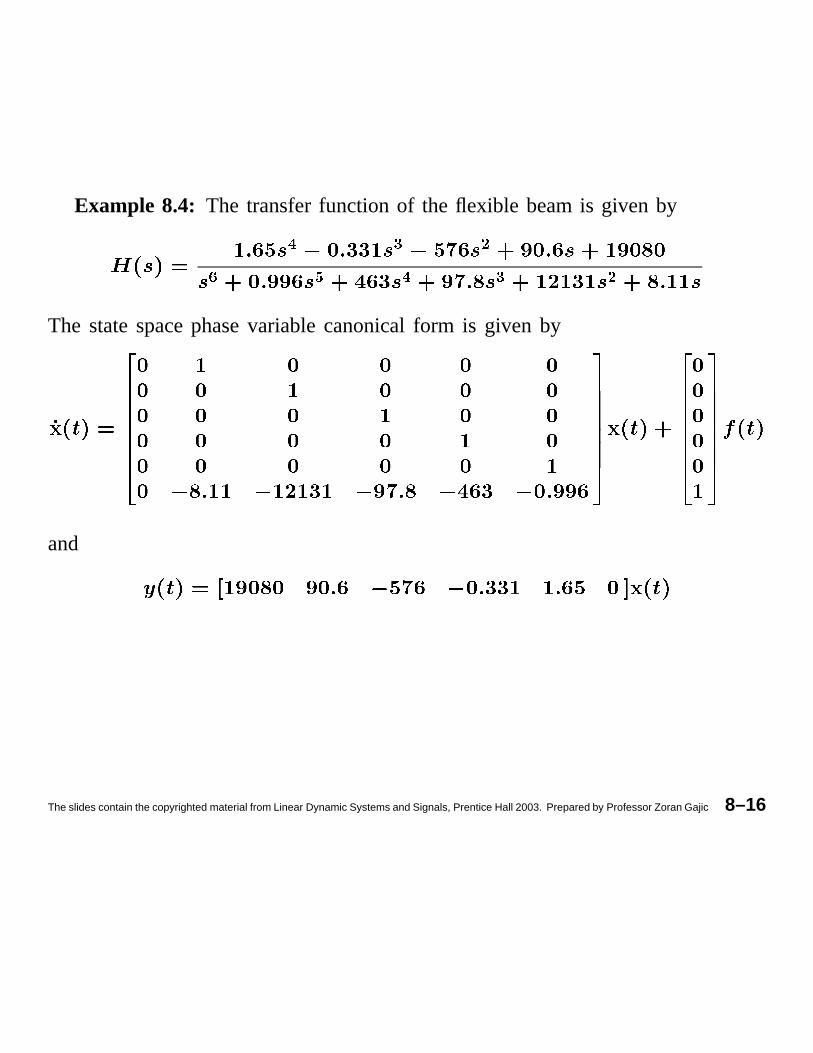
Example 8.4: The transferfunction of the flexible beamis given byÁ Â ÃÄ Å Á Â ÃThe statespacephasevariablecanonicalform is given by
and
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–16
8.2 Time Response from the State Equation
The solutionof the statespaceequationscanbeobtainedeitherin the time domain
by solvingthecorrespondingmatrixdifferentialequationdirectlyor in thefrequency
domainby exploiting the power of the Laplacetransform. Both methodswill be
presentedin this section.
8.2.1 Time Domain Solution
For the purposeof solving the stateequation,let us first supposethat the system
is in the scalar form
with a known initial condition Æ . It is very well known from the
elementarytheoryof differentialequationsthat the solution is given by
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–17

Ç�È É ÈÉ ÇdÊËÈ1ÌÎÍÐÏTheexponentialterm
Ç�ÈcanbeexpressedusingtheTaylor seriesexpansionaboutÉ
as Ç�È Ñ Ñ Ò Ò ÓÔkÕ É ÔAnalogously,in the following we provethat the solutionof a general th-order
matrix statespacedifferential equationis given byÖ È ÈÉ Ö Ê×ÈØÌÍcÏ
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–18
Forsimplicity, wefirst considerthehomogeneoussystemwithoutaninput, thatisÙBy analogywith thescalarcase,we expectthesolutionof this differentialequation
to be Ú�ÛWe shall prove that this is indeeda solution if it satisfiesthe given differential
equation.Thematrix exponentialis definedusingtheTaylor seriesexpansionasÚÎÛ Ü Ü Ý Ý Þßkà.á ß ß
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–19

The proof is simple and is obtainedby taking the derivativeof the right-hand
side, that is â�ã ä ää å ä ä ä
ä ä âÎã â�ãNow, substitutionof the assumedsolution into the differentialequationyieldsâ�ã â�ãso that the matrix differential equationis satisfied, andhence
âÎãis
its solution. Note that for we have
â.æ,
so the initial condition is also satisfied.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–20
The matrix çÎè is known as the statetransition matrix becauseit relatesthe
systemstateat time to that at time zero, and is denotedbyç�èThe state transition matrix as a time function dependsonly on the matrix .
Therefore completelydescribesthe internal behaviorof the system,when
the externalinfluence(systeminput ) is absent.The systemtransitionmatrix
playsa fundamentalrole in thetheoryof lineardynamicalsystems.In thefollowing,
we stateandverify the main propertiesof this matrix, which is representedin the
symbolic form by ç�è .
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–21

Properties of the State Transition Matrix
It can be easily verified, by taking the derivativeof
that the statetransitionmatrix satisfiesthe linear homogeneousstateequationwith
the initial condition equal to an identity matrix, that is
The main propertiesof the matrix are:
(a)
(b) é*ê(c) ë ì ë ê ê ì(d) í , for
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–22

The proofs are straightforward. Property (a) is obtained when is
substitutedin the infinite sum that definesthe matrix exponential.
Property(b) holds, since îï ð.ñ î�ïwhich after multiplication from the right-handsideby
ð î�ïimpliesî�ï ð*ñ ò ð î�ï ð*ñ
and (c) follows from ó ò îõô×ï÷ö ð ï�øúù îûô×ï�ö ð ï4ü,ýï4ü ð ïaø1ùîþô×ï ö ð ï ø ù îûô×ï ü ð ï ø ù ó ñ ñ òProperty(d) is provedby using the fact thatÿ îÎï ÿ îþô ÿ ï ù
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–23

In addition to properties(a), (b), (c), and (d), we havealreadyestablishedone
additionalproperty,namelythe derivativeproperty,as
(e)��� ��� ���
The statetransitionmatrix can be found by usingseveralmethods.Two
of themaregiven in this section.The third one,very popularin linear algebra,is
basedon the Cayley–Hamiltontheoremand is given in Section8.5.
In thecasewhenthe input is presentin thesystem(forcedresponse),that is
�
we look for the solution of the statespaceequationin the form
���
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–24

Then��� ��� ���
It follows that
���
and we have
��� � ���
Integratingthis equation,bearingin mind that����
, we get
�
���
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–25

Substitutionof thelastexpressionin���
givestherequiredsolution
����
������������
or �
�
Whenthe initial stateof the systemis known at time � , ratherthanat time ,
the solution of the stateequationis similarly obtainedas
� ��
������������ ��� �
�
� ������������
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–26

The solution derived representsthe systemstateresponse. The systemoutput
responseis
!�"�#�$�#�%'& (#
# %!�"�#�$�)*&
Example 8.5: For the systemgiven by
find the statetransitionmatrix and evaluate .
At this point we areableto find the statetransitionmatrix (matrix exponential)
using only the infinite summation formula, which is not very convenient for
calculations.We areableonly in rarecases,to obtainan analyticalform for
by using this formula. Suchan exampleis given in Problem8.28.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–27
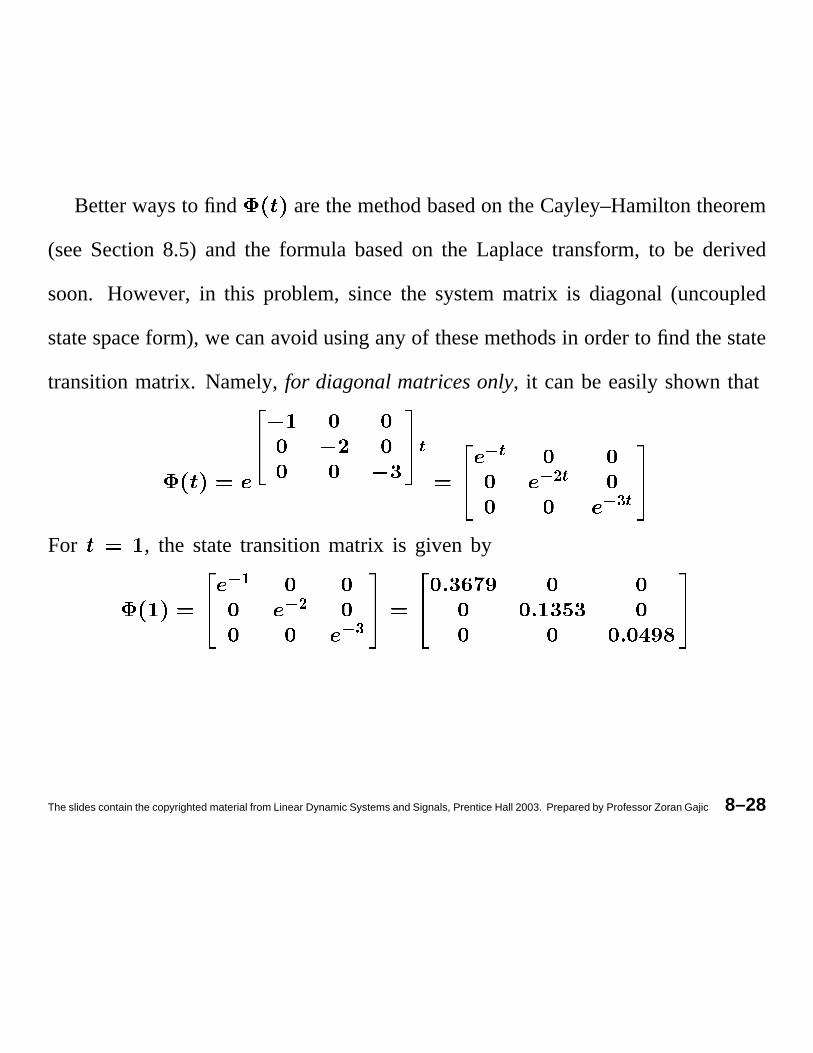
Betterwaysto find arethemethodbasedon theCayley–Hamiltontheorem
(seeSection8.5) and the formula basedon the Laplacetransform,to be derived
soon. However, in this problem,since the systemmatrix is diagonal(uncoupled
statespaceform), we canavoidusinganyof thesemethodsin orderto find thestate
transitionmatrix. Namely,for diagonalmatricesonly, it canbe easilyshownthat
+ , + ,�- + ,�. +For , the statetransitionmatrix is given by,0/
,0-,�.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–28

The stateresponseto a unit step is1
21
23�4 1 3�5�6
30784 1 3�5�63�9:4 1 3�5�6
1
23�4 1 3�5�630784 1 3�5�63�9;4 1 3�5�6
3 1307 13�9 1
Note that for the stepresponseby definition, the initial conditionshaveto be set
to zero. It canbe seenfrom the last expressionthat the steadystatevaluesfor the
systemstatespacevariablesare .
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–29

8.2.2 Solution Using the Laplace Transform
The time trajectoryof the statevector can also be found using the Laplace
transformmethod.The Laplacetransformappliedto the stateequationgives
<
or
<
which implies
<�= < <�=
where is identity matrix of order . Comparingthetime domainsolutionfor
previouslyobtainedandthe frequencydomainsolution , we conclude
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–30

>@?
or
>�? >�? >�?
Let us assumethat>
. The time form of the statevector is obtained
by applying the inverseLaplacetransformto
Note that the secondterm on the right-handside correspondsin the time domain
to the convolution integral, so that we have
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–31

A8B A;C D�EE
FD�G�E�H�I�J
where A8B and A;C arethezero-inputandzero-statecomponentsof thesystem
stateresponse.Oncethe statevector is determined,the systemoutputvector
is simply obtainedas
A8B A;C D�EE
FD�G�E�H�I�J
where A8B and A;C representthezero-inputandzero-statecomponentsof the
systemoutput response.By taking the Laplacetransformof the last formula, we
get the correspondingformula in the frequencydomain
A8B A;C
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–32

Example 8.6: Considerthe linear systemwhosestatespacematricesare
The statetransitionmatrix of this systemis obtainedas follows
K0L K�L K�L
M NPO@QR NSO�TVU R NWO�XYU LR NSO�TVU R NWO�XYUK�ZR NSO�TVU R NWO�XYU NR NSO�TVU R NWO�XYUwhich implies
[�\ K�L K�L XNWO]T TNSO@X LNSO�T LNWO�XK�ZNWO]T ZNSO@X K TNSO�T XNWO�XK T \ K X \ K T \ K X \K T \ K X \ K T \ K X \
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–33

Let the systeminput function and initial conditionsbe given by
^�_a` b
Then the stateresponseof this systemis obtainedas
c ` c ``
d^ c�e ^�_ e
^�fS` ^�gP`^0fS` ^�gP` c `
`d
f e g ef e g e ^�_ e
^0fS` ^�gP`^0fS` ^�gP`
hf ^0fS` ^�gP` hf ^�_P`^0fS` ^�gP` ^�_P`
if ^0fS` ^�gP` hf ^�_P`^0fS` ^�gP` ^�_P` h
f
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–34

The systemoutput responseis obtainedas
j k�lSm k�nPm k�oPm
The systemstateand output responsescan also be obtainedin the frequency
domain, and by applying the Laplaceinverseto and , which seems
to be easier(at least for this exampleand lower order systems)than the direct
time-domainmethodusedabove.This procedureis demonstratedbelow.
pPq@rs pSq lVt s pSq nutk�vs pSq lVt s pSq nutjs pSq lVt s pWq nwt s pSq outps pSq lVt s pWq nwt s pSq out
jl
j
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–35

The time domainsolution is given by
x@y x�y z{}|0~ ~{W| zx��{S|�~ �{W| z�:���{S|�~ y{W| z �8���{S|@�y{S|�~ z{W| z ~{S|@��~ x ~S� x z � y~ x �P�
x ~S� x z � x �P� y~y
8.2.3 State Space Model and Transfer Function
The matrix that establishesa relationshipbetweenthe outputvector and the
input vector , for the zero initial conditions, , is called the system
matrix transferfunction. From the resultderivedfor , it is given by
x�y
Note that this is the open-loopsystemmatrix transferfunction.
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–36
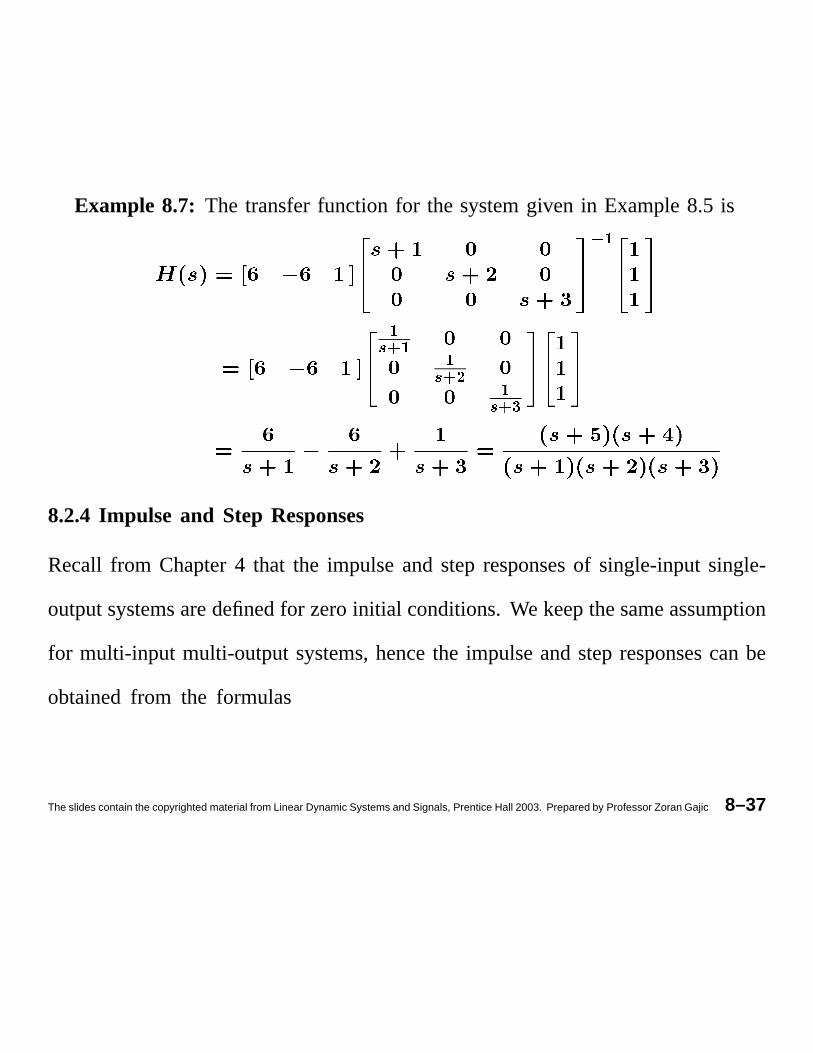
Example 8.7: The transferfunction for the systemgiven in Example8.5 is�0�
��P� � ��W�]� ��S�@�
8.2.4 Impulse and Step Responses
Recall from Chapter4 that the impulseand stepresponsesof single-inputsingle-
outputsystemsaredefinedfor zeroinitial conditions.We keepthesameassumption
for multi-input multi-outputsystems,hencethe impulseandstepresponsescanbe
obtainedfrom the formulas
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–37

�
���� �����*�
Sincethe input forcing function is a vectorof dimensions , we candefinethe
impulseandstepresponsesfor every input of the system.We introducethe input
function whoseall componentsarezeroexceptfor the th component
� � �
Note that
� � � � � � � � � ��� � � � � �
where � is the th column of the matrix .
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–38

The stateand output responsesdue to the th componentof the input signal
are given by
� �
¡�¢ �¤£�¥§¦ � �
� � � � � �where � is the th column of the matrix .
If � , thentheaboveformulaswill producethesystemoutputimpulse
response,�
, due to the delta impulsefunction on the th systeminput andall
other inputs equal to zero, as follows
� �
¡�¢ �¤£�¥¨¦ � ¡ � �
� ¡ � � � �
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–39

Similarly, with © , we can definethe systemoutputstepresponse
dueto theunit stepfunctionon the th systeminput andall otherinputssetto zero
© ª¤«¬®«
¯°�± «�²�³*´
©«
¯°�± «¤²�³�´
©«
¯°¶µ ©
© ª·«¬�® © ª�«¸¬�® ©«
¯°¶µ © ©
It follows that
© ª·«¬�®«
¯©
and
© © ª�«¸¬�®
The slides contain the copyrighted material from Linear Dynamic Systems and Signals, Prentice Hall 2003. Prepared by Professor Zoran Gajic 8–40





























