Embed Size (px)
Citation preview

Control de movimiento NextMove PCI-2


ContenidosContenidos
1 Información general
2 Introducción2.1 Características de NextMove PCI-2. . . . . . . . . . . . . . . . . . . . . . . . 2-1
2.2 Recepción e inspección. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-32.2.1 Identificación del número de catálogo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
2.3 Unidades y abreviaturas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
3 Instalación básica3.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
3.1.1 Requisitos de ubicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-13.1.2 Otros requisitos para la instalación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
3.2 Instalación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-33.2.1 Instalación de la tarjeta NextMove PCI-2 . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
4 Entrada/Salida4.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
4.2 Conector de 100 terminales (ranura de expansión). . . . . . . . . . . . 4-24.2.1 Asignación de terminales del conector de 100 terminales
(ranura de expansión) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-3
4.3 E/S analógica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-54.3.1 Entradas analógicas - X6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-54.3.2 salidas analógicas (demandas) - X7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-7
4.4 Entrada/Salida (I/O) digital. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-94.4.1 Entradas digitales - resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-94.4.2 Entradas digitales - X1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-114.4.3 Entradas digitales - X2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-124.4.4 Entradas digitales - X3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-134.4.5 Salidas digitales - resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-154.4.6 Salidas digitales - X4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-154.4.7 Salidas digitales - X5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-17
4.5 Otras E/S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-184.5.1 Entradas de encoder - X12, X13, X14, X15, X16 . . . . . . . . . . . . . . . . . . . . 4-184.5.2 Alimentación - X9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-204.5.3 Alimentación de relé y de CAN - X8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-214.5.4 Salidas de control paso a paso - X10, X11 . . . . . . . . . . . . . . . . . . . . . . . . . 4-224.5.5 Conexión del emulador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-23
4.6 CAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-244.6.1 Conector CANopen - X17 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-254.6.2 CANopen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-254.6.3 Conector Baldor CAN - X18 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-27
MN1933WES Contenidos i

4.6.4 CAN Baldor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-274.6.5 Cableado de CAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-29
4.7 Estados de reinicialización . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-304.7.1 Vigilancia (watchdog) del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-30
4.8 Resumen de conexiones - cableado mínimo del sistema . . . . . . .4-31
5 Funcionamiento5.1 Introducción. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-1
5.1.1 Instalación del software del controlador. . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-15.1.2 Instalación de Mint WorkBench . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-1
5.2 Mint Machine Center . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-25.2.1 Inicio del MMC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-3
5.3 Mint WorkBench . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-55.3.1 Archivo de ayuda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-65.3.2 Inicio del Mint WorkBench . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-7
5.4 Configuración de un eje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-105.4.1 Selección del tipo de eje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-105.4.2 Seleccionar una escala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-115.4.3 Ajuste de la salida de habilitación del accionamiento . . . . . . . . . . . . . . . . .5-125.4.4 Probar la salida de habilitación del accionamiento . . . . . . . . . . . . . . . . . . .5-13
5.5 Servoeje - prueba y ajuste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-145.5.1 Probar la salida de demanda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-145.5.2 Una introducción al control de bucle cerrado. . . . . . . . . . . . . . . . . . . . . . . .5-15
5.6 Servoeje - ajuste para el control de corriente . . . . . . . . . . . . . . . .5-185.6.1 Selección de las ganancias del servobucle . . . . . . . . . . . . . . . . . . . . . . . . .5-185.6.2 Respuesta subamortiguada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-205.6.3 Respuesta sobreamortiguada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-215.6.4 RespuestaCríticamente amortiguada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-22
5.7 Servoeje - eliminar errores de estado estable. . . . . . . . . . . . . . . .5-23
5.8 Servoeje - ajuste para el control de velocidad. . . . . . . . . . . . . . . .5-245.8.1 Cálculo de KVELFF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-245.8.2 Ajuste de KPROP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-27
5.9 Prueba del eje de motor paso a paso . . . . . . . . . . . . . . . . . . . . . .5-295.9.1 Prueba de la salida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-29
5.10 Configuración de la entrada/salida digital . . . . . . . . . . . . . . . . . . .5-305.10.1 Configuración de la entrada digital. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-305.10.2 Configuración de salida digital . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-32
5.11 Grabar información de configuración . . . . . . . . . . . . . . . . . . . . . .5-335.11.1 Cargar la información guardada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-34
6 Resolución de problemas6.1 Introducción. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-1
6.1.1 Diagnóstico de problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-16.1.2 Función SupportMe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-1
ii Contenidos MN1933WES

6.2 Indicadores NextMove PCI-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-26.2.1 LEDs de estado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-26.2.2 LEDs de CAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-26.2.3 LED de reinicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-3
6.3 Resolución de problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-46.3.1 Comunicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-46.3.2 Control del motor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-4
7 Especificaciones7.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-1
7.1.1 Alimentación de entrada y especificaciones mecánicas . . . . . . . . . . . . . . . . 7-17.1.2 Entradas analógicas (X6) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-17.1.3 salidas analógicas (X7) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-27.1.4 Entradas digitales (X1 & X2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-27.1.5 Entradas digitales (X3) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-37.1.6 Salidas digitales (X4) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-37.1.7 Salida de relé (X8) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-37.1.8 Entradas de encoder (X12 - X16) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-47.1.9 Salidas de control paso a paso (X10 & X11) . . . . . . . . . . . . . . . . . . . . . . . . 7-47.1.10 Interfaz CANopen (X17) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-47.1.11 Interfaz Baldor CAN (X18) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-47.1.12 Especificaciones ambientales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-5
Apéndices
A AccesoriosA.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-1
A.1.1 Módulo de distribución de NextMove PCI-2 . . . . . . . . . . . . . . . . . . . . . . . . . A-1A.1.2 Adaptador de sistema PC para NextMove . . . . . . . . . . . . . . . . . . . . . . . . . . A-2A.1.3 Placa de función buffer/divisor de encoder . . . . . . . . . . . . . . . . . . . . . . . . . . A-2A.1.4 Recambios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-3A.1.5 Cables de realimentación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-3A.1.6 Nodos CAN Baldor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-4A.1.7 Paneles HMI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-5A.1.8 Mint NC (software de paso de diseño CAD a movimiento) . . . . . . . . . . . . . . A-5
B Resumen de palabras clave de MintB.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-1
B.1.1 Listado de palabras clave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-1
MN1933WES Contenidos iii

iv Contenidos MN1933WES

Información general1 Información general
LT0226A05ES Copyright ABB (c) 2012. Todos los derechos reservados.
Este manual está protegido por los derechos de autor y todos los derechos están reservados. Nieste documento ni el software adjunto pueden, ni en parte ni en su totalidad, ser copiados oreproducidos de ninguna manera sin el consentimiento previo por escrito de ABB.ABB no representa ni garantiza los contenidos aquí presentados y declina la responsabilidad decualquier garantía de adecuación implícita para cualquier propósito. La información en estedocumento está sujeta a cambios sin previo aviso. ABB no se hace responsable de ningún error quepudiera aparecer en este documento.
Mint™ es marca comercial registrada de Baldor, miembro del grupo ABB.Windows XP, Windows Vista y Windows 7 son marcas registradas de Microsoft Corporation.
ABB LtdMotion Control6 Bristol Distribution ParkHawkley DriveBristol, BS32 0BFTeléfono: +44 (0) 1454 850000Fax: +44 (0) 1454 859001E-mail: [email protected] Web: www.abbmotion.com
Ver al dorso para otras oficinas internacionales.
1
MN1933WES Información general 1-1

Advertencia de seguridadSolo el personal cualificado debe poner en marcha, programar o reparar este equipo. Este equipo sepuede conectar a otras máquinas que tengan piezas en rotación o piezas controladas por esteequipo. El uso inapropiado puede provocar lesiones graves o la muerte.
Precauciones
No toque ninguna placa de circuito, dispositivo de alimentación o conexión eléctricaantes de asegurarse de que no haya voltaje presente en este equipo u otro equipo alque está conectado. La descarga eléctrica puede provocar lesiones graves o la muerte.Solo el personal cualificado debe poner en marcha, programar o reparar este equipo.
Asegúrese de estar completamente familiarizado con el funcionamiento y laprogramación seguros de este equipo. Este equipo se puede conectar a otras máquinasque tengan piezas en rotación o piezas controladas por este equipo. El uso inapropiadopuede provocar lesiones graves o la muerte.
PELIGROS RELACIONADOS CON EL USO DE DISPOSITIVOS MÉDICOS/MARCAPASOS: Los campos magnéticos y electromagnéticos generados en lasproximidades de conductores activos conduciendo electricidad y de motores industrialespueden representar riesgos serios sobre la salud de las personas que utilizanmarcapasos cardíacos, desfibriladores cardíacos internos, implantes de metal, implantescocleares, dispositivos de audición, u otros dispositivos médicos. Para evitar riesgos,permanezca alejado del área de influencia alrededor de un motor y de sus conductoresde transporte de corriente.
La entrada de parada de este equipo no se debe utilizar como método único paragenerar una parada vital de seguridad. Se deben utilizar según corresponda lainhabilitación del accionamiento, la desconexión del motor, el freno del motor y otrosmedios.
El funcionamiento o la programación inapropiados pueden ocasionar movimientosviolentos del eje del motor y del equipo accionado. Asegúrese de que el movimientoinesperado del eje del motor no provoque lesiones al personal o daños al equipo.Durante un fallo del control, se puede generar un pico de torsión varias veces porencima del par de torsión clasificado del motor.
La integración segura de este equipo a un sistema de máquinas es responsabilidad deldiseñador de la máquina. Asegúrese de cumplir con los requisitos de seguridad localesen el lugar donde se utilizará la máquina. En Europa, se debe seguir la Directiva deMaquinaria, la Directiva de Compatibilidad Electromagnética y la Directiva de BajoVoltaje. En Estados Unidos, rigen el Código Eléctrico Nacional y los códigos locales.
Los componentes eléctricos se pueden dañar debido a la electricidad estática. Utiliceprocedimientos de ESD (descarga electrostática) al manipular este equipo.
!ADVERTENCIA
!ADVERTENCIA
!ADVERTENCIA
!PRECAUCIÓN
!PRECAUCIÓN
NOTAi
NOTAi
1-2 Información general MN1933WES

Introducción2 Introducción
2.1 Características de NextMove PCI-2NextMove PCI-2 es un controlador inteligente multieje de alta velocidad para su empleo ensistemas PC basados en bus PCI.
El NextMove PCI-2 incluye el idioma de control de movimientos Mint. Mint es una formaestructurada de Basic, diseñada específicamente para aplicaciones de control demovimientos servoasistidos o de motores paso a paso. Le permite empezar muyrápidamente con programas de control de movimiento simples. Además, Mint incluye unamplio rango de comandos potentes para aplicaciones complejas.
Entre las funciones estándar se incluyen:
Control de hasta ocho ejes.
Movimientos punto a punto, levas y engranajes por software.
20 entradas digitales optoaisladas con software configurable para una activación pornivel o por flanco.
12 salidas digitales optoaisladas. Disponibles modelos con salidas PNP o NPN.
4 entradas analógicas diferenciales con resolución de 12 bits.
4 salidas analógicas de demanda de accionamiento de terminal único con resolución de16 bits.
2
MN1933WES Introducción 2-1

Protocolo CANopen o CAN Baldor registrado para la comunicación con controladoresMint y otros dispositivos de terceros.
Programable en Mint.
La aplicación de software de Mint WorkBench puede instalarse desde el CD de herramientasde Mint Motion (OPT-SW-001), o puede descargarse de www.abbmotion.com. MintWorkBench proporciona:
Mint WorkBenchProporciona todo lo que necesita para tener listo y funcionando su NextMove PCI-2.Mint WorkBench proporciona capacidad para la configuración, puesta en servicio,parametrización, programación, depuración y monitorización.
Mint Machine CenterProporciona una visión de red de todos los controladores conectados y permite unrápido acceso a Mint WorkBench del dispositivo seleccionado.
Control ActiveXEl control ActiveX permite la comunicación de las aplicaciones de PC con el NextMovePCI-2.
El propósito de este manual es guiarle a través de la instalación del NextMove PCI-2.
Los capítulos se deben leer en orden.
La sección Instalación básica describe la instalación mecánica del NextMove PCI-2.Las siguientes secciones requieren el conocimiento de los requisitos de entrada/salida debajo nivel de la instalación y cierta comprensión de la instalación de software informático. Sino está cualificado en estas áreas, debe pedir asistencia antes de proceder.
2-2 Introducción MN1933WES

2.2 Recepción e inspecciónAl recibir su NextMove PCI-2, debe hacer varias cosas inmediatamente:
1. Verifique el estado del paquete y notifique cualquier daño inmediatamente altransportista que le suministró su NextMove PCI-2.
2. Extraiga el NextMove PCI-2 de la caja donde lo recibió pero no lo extraiga de la bolsaantiestática hasta el momento en que tenga todo listo para la instalación. Conserve losmateriales de embalaje para un futuro reenvío.
3. Verifique que el número de catálogo del NextMove PCI-2 que ha recibido es el mismoque el número de catálogo que se encuentra en su orden de compra. El número decatálogo o número de pieza se describen en la siguiente sección.
4. Inspeccione el NextMove PCI-2 en busca de daños superficiales que se pudieran haberocasionado durante el transporte y de existir, notifíquelos al transportista que se loentregó.
5. Si el NextMove PCI-2 debe ser almacenado durante algunas semanas antes de serutilizado, asegúrese de que se guarde en un sitio que cumpla con las especificacionesde humedad y temperatura para almacenamiento previstas en la sección 3.1.1.
2.2.1 Identificación del número de catálogo
Las tarjetas NextMove PCI-2 están disponibles con diferentes especificaciones. Comorecordatorio de la tarjeta que ha sido instalada, es una buena idea escribir el número decatálogo en el espacio previsto a continuación.
Aquí se muestra una descripción del número de catálogo, utilizando el ejemplo PCI201-504:
Número decatálogo
Significado
PCI201 Familia NextMove PCI-2
50 Salidas digitales PNP; 51 indica salidas digitales NPN.
4 Número de ejes físicos (hasta un máximo de 8).
Número de catálogo: PCI201- _____________________________
Instalado en: ______________________________________ Fecha: ___________
MN1933WES Introducción 2-3

2.3 Unidades y abreviaturasLas siguientes unidades y abreviaturas se utilizan en este manual:
V. . . . . . . . . . . . . . . . Voltios (también V AC -corriente alterna- y V DC -corriente continua-)W . . . . . . . . . . . . . . . WatiosA. . . . . . . . . . . . . . . . AmperiosΩ . . . . . . . . . . . . . . . OhmmΩ . . . . . . . . . . . . . . OmiliohmiosµF. . . . . . . . . . . . . . . microfaradiospF. . . . . . . . . . . . . . . picofaradiosmH . . . . . . . . . . . . . . millihenrys
Φ . . . . . . . . . . . . . . . fasems . . . . . . . . . . . . . . milisegundosµs . . . . . . . . . . . . . . . microsegundosns . . . . . . . . . . . . . . . nanosegundos
mm. . . . . . . . . . . . . . milímetrom . . . . . . . . . . . . . . . metroin . . . . . . . . . . . . . . . pulgadaft . . . . . . . . . . . . . . . . pielbf-in . . . . . . . . . . . . . libra-fuerza por pulgada (par)N·m . . . . . . . . . . . . . Newton-metro (par)
ADC . . . . . . . . . . . . . Convertidor analógico-digitalASCII . . . . . . . . . . . . American Standard Code for Information Interchange (Código
estándar americano para el intercambio de información)AWG . . . . . . . . . . . . Tabla de grosores de conductores eléctricos según la AWG (American
Wire Gauge)CAL . . . . . . . . . . . . . Capa de aplicación CANCAN . . . . . . . . . . . . . Red de área de controladoresCDROM . . . . . . . . . . Disco compacto de memoria de solo lecturaCiA . . . . . . . . . . . . . . CAN en el Grupo de usuarios y fabricantes internacionales de
automoción e.V.CTRL+E . . . . . . . . . . en el teclado del PC, presione Ctrl y E al mismo tiempo.DAC . . . . . . . . . . . . . Convertidor digital-analógicoDS301 . . . . . . . . . . . Capa de aplicación CANopen y perfil de comunicaciones para CiADS401 . . . . . . . . . . . Perfil de dispositivo CiA para dispositivos con E/S genéricos DS403 . . . . . . . . . . . Perfil de dispositivo CiA para HMIs EDS . . . . . . . . . . . . . Hoja de datos electrónica EMC. . . . . . . . . . . . . Compatibilidad Electromagnética HMI . . . . . . . . . . . . . Interfaz hombre-máquinaISO. . . . . . . . . . . . . . Organización internacional de normalizaciónKbaud. . . . . . . . . . . . kilobaudio (lo mismo que los Kbit por segundo en la mayoría de las
aplicaciones)LCD . . . . . . . . . . . . . Pantalla de cristal líquidoMB . . . . . . . . . . . . . . megabytes Mbps . . . . . . . . . . . . megabits/s (NC) . . . . . . . . . . . . . No ConectadoRF . . . . . . . . . . . . . . Radiofrecuencia
2-4 Introducción MN1933WES

Instalación básica3 Instalación básica
3.1 IntroducciónDeben leerse todas las secciones de la Instalación básica.Es importante que se sigan los pasos correctos al instalar el NextMove PCI-2. Esta seccióndescribe la instalación mecánica y eléctrica del NextMove PCI-2.
3.1.1 Requisitos de ubicaciónEs esencial que lea y comprenda esta sección antes de comenzar con la instalación.
Para evitar daños en el equipo, asegúrese de que las señales de entrada ysalida estén conectadas y activadas correctamente.
Para garantizar el rendimiento fiable de este equipo, asegúrese de que todas lasseñales desde y hacia el NextMove PCI-2 estén correctamente blindadas.
Evitar colocar el NextMove PCI-2 o el PC anfitrión inmediatamente encima ojunto a un equipo que genere calor o directamente debajo de tuberías de vaporde agua.
Evite colocar el NextMove PCI-2 o PC anfitrión cerca de sustancias corrosivas ovapores, partículas de metal y polvo.
El funcionamiento seguro de este equipo depende de su uso en un entorno apropiado. Sedeben tener en cuenta los siguientes puntos:
El NextMove PCI-2 debe instalarse en un armario cerrado situado de forma que solo setenga acceso al mismo por parte de personal de servicio utilizando herramientas.
La altitud máxima sugerida de funcionamiento es de 2000 m (6560 pies).
El NextMove PCI-2 se debe instalar a una temperatura ambiente de entre 0 °C a 45 °C(32 °F a 113 °F).
El NextMove PCI-2 debe instalarse en lugares donde el nivel de humedad relativa seainferior al 93% para temperaturas de hasta 31 °C (87 °F), disminuyendo linealmentehasta el 50% de humedad relativa a 45 °C (113 °F) (sin condensación).
El NextMove PCI-2 debe instalarse en lugares donde el nivel de contaminación según lanorma IEC664 no supere el grado 2.
La alimentación se suministra a la tarjeta desde el bus de suministro del PC anfitrión.
La atmósfera no debe contener gases ni vapores inflamables.
No deben existir niveles anormales de radiación nuclear o rayos X.
NOTAi
NOTAi
NOTAi
NOTAi
3
MN1933WES Instalación básica 3-1

3.1.2 Otros requisitos para la instalaciónLos componentes necesarios para completar la instalación básica se describen acontinuación:
Un PC que cuente con las siguientes especificaciones:
Especificación mínima
Procesador 1 GHz
RAM 512 MB
Espacio en eldisco duro
2 GB
CD-ROM Una unidad de CD-ROM
Ranura PCI Una ranura PCI libre
Pantalla 1024 × 768, a color de 16 bits
Ratón Un ratón o un dispositivo de puntero similar
Sistemaoperativo
Windows XP o superior, 32-bit o 64-bit
3-2 Instalación básica MN1933WES
3.2 InstalaciónEl NextMove PCI-2 puede instalarse en un ordenador personal tipo AT que posea unaranura libre para tarjetas PCI de 7 pulgadas. Necesitará un pequeño destornillador de puntacruzada para montar la tarjeta.
3.2.1 Instalación de la tarjeta NextMove PCI-2Antes de tocar la tarjeta, asegúrese de descargar la electricidad estática de sucuerpo y vestimenta tocando una superficie de metal en contacto con el suelo.Como alternativa, utilizar una correa antiestática puesta a tierra mientras semanipulan estos elementos.
1. Salga de todas las aplicaciones que estén ejecutándose y cierre todas las ventanas.Cierre de ventanas.
2. Desconectar la alimentación (si no lo hace Windows automáticamente) y desenchufetodos los cables de alimentación.
3. Retirar la cubierta de la unidad del sistema de ordenador.
4. Buscar una ranura PCI libre.
5. Retirar la cubierta de la toma posterior correspondiente a la ranura, y guardar el tornillopara su uso posterior.
6. Descargue cualquier posible electricidad estática de su cuerpo y vestimenta.
7. Retire la tarjeta de su envoltorio protector. No tocar los contactos de oro de la parteinferior de la tarjeta.
8. Alinear la parte inferior de la tarjeta (contactos de oro) con la ranura y presionar la tarjetafirmemente en la base. Una vez instalada correctamente, la tarjeta queda anclada en suposición final.
9. Asegurarse de que la parte superior de la tarjeta queda nivelada (no inclinada) y de quela ranura en la parte superior de la abrazadera metálica de la tarjeta se alinea con elorificio para el tornillo de la caja del PC.
10. Introducir el tornillo y apretarlo para fijar la tarjeta.
11. Volver a colocar la cubierta del ordenador y los tornillos.
12. Volver a conectar los cables de alimentación y demás cables que se hayandesconectado o desenchufado previamente.
13. Fijar el conjunto del cable opcional de 100 terminales al NextMove PCI-2. Esrecomendable facilitar un apoyo adicional al cable para impedir fuerzas mecánicassobre el conector.
NOTAi
MN1933WES Instalación básica 3-3

3-4 Instalación básica MN1933WES

Entrada/Salida4 Entrada/Salida
4.1 IntroducciónEsta sección describe las capacidades de entrada y salida analógicas y digitales delNextMove PCI-2.
Se utilizarán las siguientes convenciones para referirse a las entradas y salidas:
I/O . . . . . . . . . . . . . . Input / Output (Entrada/Salida)DIN . . . . . . . . . . . . . Entrada digitalDOUT . . . . . . . . . . . Salida digitalAIN . . . . . . . . . . . . . Entrada analógicaAOUT . . . . . . . . . . . Salida analógica
Las conexiones a la tarjeta del NextMove PCI-2 se realizan utilizando el conjunto decable de 100 vías y el módulo de distribución montado sobre riel DIN del NextMovePCI-2 (suministrados como opciones, ver Apéndice A). Todos los números deconector en las siguientes secciones se refieren al módulo de distribución. Esrecomendable facilitar un apoyo adicional al cable para impedir fuerzas mecánicassobre el conector.
4
MN1933WES Entrada/Salida 4-1

4.2 Conector de 100 terminales (ranura de expansión)
51 1
100 50
La asignación de terminales para el conector de 100 terminales tipo DIN se muestra en la Tabla 1.
4-2 Entrada/Salida MN1933WES

4.2.1 Asignación de terminales del conector de 100 terminales (ranura de expansión)
Terminal Señal Terminal Señal
100 Relé NO 50 Relé COM
99 Relé NC 49 Común1
98 DIN0 48 DIN2
97 DIN1 47 DIN3
96 DIN4 46 DIN6
95 DIN5 45 DIN7
94 DIN8 44 DIN10
93 DIN9 43 DIN11
92 DIN12 42 DIN14
91 DIN13 41 DIN15
90 DIN16 40 DIN18
89 DIN17 39 DIN19
88 Común2 38 DOUT0
87 CGND 37 DOUT1
86 DOUT2 36 DOUT3
85 CGND 35 DOUT4
84 DOUT5 34 DOUT6
83 USR V+ 33 DOUT7
82 DOUT8 32 DOUT9
81 USR V+ 31 DOUT10
80 DOUT11 30 STEP3
79 DIR3 29 DIR1
78 DIR2 28 STEP1
77 DIR0 27 STEP2
76 +5 V out (Tensión de salida) 26 STEP0
75 Encoder maestro CHZ+ 25 Encoder maestro CHZ-
74 Encoder maestro CHB+ 24 Encoder maestro CHA+
73 Encoder maestro CHB- 23 Encoder maestro CHA-
72 Encoder 1 CHZ+ 22 Encoder 3 CHZ+
71 Encoder 1 CHZ- 21 Encoder 3 CHZ-
70 Encoder 1 CHB+ 20 Encoder 3 CHB+
MN1933WES Entrada/Salida 4-3
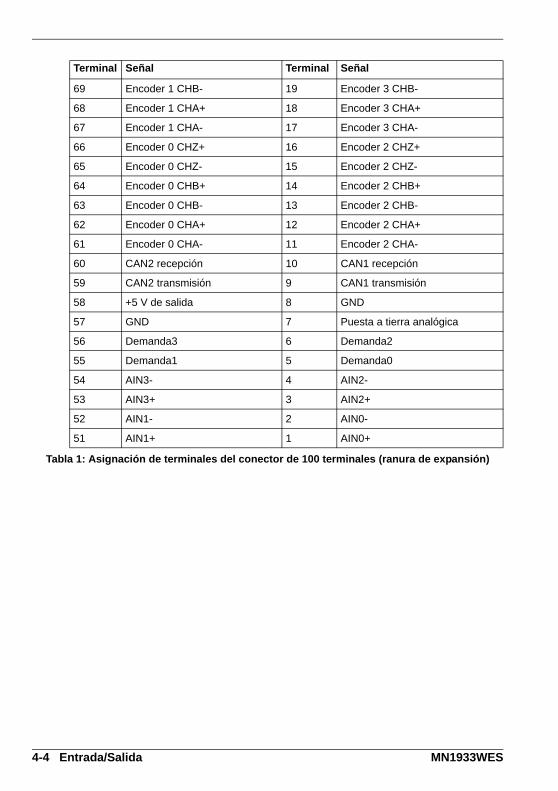
Tabla 1: Asignación de terminales del conector de 100 terminales (ranura de expansión)
Terminal Señal Terminal Señal
69 Encoder 1 CHB- 19 Encoder 3 CHB-
68 Encoder 1 CHA+ 18 Encoder 3 CHA+
67 Encoder 1 CHA- 17 Encoder 3 CHA-
66 Encoder 0 CHZ+ 16 Encoder 2 CHZ+
65 Encoder 0 CHZ- 15 Encoder 2 CHZ-
64 Encoder 0 CHB+ 14 Encoder 2 CHB+
63 Encoder 0 CHB- 13 Encoder 2 CHB-
62 Encoder 0 CHA+ 12 Encoder 2 CHA+
61 Encoder 0 CHA- 11 Encoder 2 CHA-
60 CAN2 recepción 10 CAN1 recepción
59 CAN2 transmisión 9 CAN1 transmisión
58 +5 V de salida 8 GND
57 GND 7 Puesta a tierra analógica
56 Demanda3 6 Demanda2
55 Demanda1 5 Demanda0
54 AIN3- 4 AIN2-
53 AIN3+ 3 AIN2+
52 AIN1- 2 AIN0-
51 AIN1+ 1 AIN0+
4-4 Entrada/Salida MN1933WES

4.3 E/S analógicaEl NextMove PCI-2 proporciona:
Dos entradas analógicas con 12 bits de resolución.
Cuatro salidas analógicas con 16 bits de resolución.
4.3.1 Entradas analógicas - X6
Las entradas analógicas están disponibles en el conector X6 del módulo de distribución.Deberán utilizarse pares trenzados y apantallados, conectándose tal como se muestran enla Figura 1. La conexión blindada deberá realizarse únicamente en un extremo.
Entradas de terminal único o diferencial.
Rango de voltaje: seleccionable por software 0-5 V, ± 5 V, 0-10 V, ±10 V
Resolución: 12-bits con signo (precisión ±4,9 mV @ ±10 V de entrada).
Impedancia de entrada: >5 kΩ.
Frecuencia de muestreo: 2,5 kHz
Las entradas analógicas pasan a través de un búfer diferencial y un filtro de paso bajo ysegundo orden con una frecuencia de corte de aproximadamente 1 kHz. Pueden serseleccionados cuatro rangos de la tensión de entrada en Mint, utilizando la palabra claveADCMODE. Las entradas analógicas se pueden leer utilizando la palabra clave ADC. Consulteel archivo de ayuda de Mint para todos los detalles de ADC, ADCMODE y otras palabras claverelacionadas con ADC.
Ubicación Módulo de distribución, conector X6
Terminal Nombre Descripción
1 AGND Puesta a tierra analógica
2 AIN0+Entrada analógica 0
3 AIN0-
4 AIN1+Entrada analógica 1
5 AIN1-
6 Pantalla Conexión blindada
7 AGND Puesta a tierra analógica
8 AIN2+Entrada analógica 2
9 AIN2-
10 AIN3+Entrada analógica 3
11 AIN3-
12 Pantalla Conexión blindada
1
12
MN1933WES Entrada/Salida 4-5

Figura 1: Cableado de entrada analógica, se muestra AIN0
Para las entradas diferenciales, conecte las líneas de entrada a AIN+ y AIN-. Deje AGND sinconectar. Para entradas de terminal único, conectar la señal a AIN+. Conectar la tierra de laseñal a AIN- y AGND.
Figura 2: El circuito de entrada típico debe proveer una entrada de 0-10 V (aprox.) de una fuente de 24 V
NextMove PCI-2
-
+
-
+
120k
120k
+12V
-12V
10k
10k TL084
3
1
2
‘X6’
AIN0+
AIN0-
AGND
MintADC(0)
cable de 100 vías
Módulo de distribución
3
2
X6
0 V
+24 V DC
1
AIN0(ADC(0)
1,5 kΩ, 0,25 W
1 kΩ, 0,25 Wpotenciómetro
4-6 Entrada/Salida MN1933WES

4.3.2 salidas analógicas (demandas) - X7
Las salidas analógicas están disponibles en el conector X7 del módulo de distribución.
Cuatro salidas de demanda independientes.
Rango de salida: ±10 V DC (±0,1%).
Resolución: 12-bits, 14-bits o 16-bits (seleccionable por software).
Corriente de salida: 1 mA como máximo.
Frecuencia de actualización: 200 µs - 2000 ms (determinado por LOOPTIME).
Mint utiliza las salidas analógicas Demanda0 a Demanda3 para controlar los amplificadoresde accionamiento. El asistente de configuración de ejes de Mint WorkBench (o las palabrasclave de Mint CONFIG y AXISCHANNEL ) pueden utilizarse para asignar salidas a los ejes,ver la sección 5.4.1). La resolución de salida puede seleccionarse bien de 12-bits, 14-bits o16-bits utilizando la palabra clave de Mint DACMODE. Las salidas analógicas pueden usarsepara accionar cargas de 10 kΩ o superiores. Las salidas hacen referencia a la tierra delsistema del PC.
Se debe utilizar un cable de par trenzado y blindado. La conexión blindada solo deberealizarse en un extremo.
Ubicación Módulo de distribución, conector X7
Terminal Nombre Descripción
1 Demanda0 Señal de salida de demanda 0
2 AGND Puesta a tierra analógica
3 Pantalla Conexión blindada
4 Demanda1 Señal de salida de demanda 1
5 AGND Puesta a tierra analógica
6 Pantalla Conexión blindada
7 Demanda2 Señal de salida de demanda 2
8 AGND Puesta a tierra analógica
9 Pantalla Conexión blindada
10 Demanda3 Señal de salida de demanda 3
11 AGND Puesta a tierra analógica
12 Pantalla Conexión blindada
1
12
MN1933WES Entrada/Salida 4-7

Figura 3: Circuito de salida analógica, se muestra Demanda0
Figura 4: Salida analógica - conexión típica a un MicroFlex de ABB
Figura 5: Salida analógica - conexión típica a un Baldor FlexDriveII, Flex+DriveII, o MintDriveII
NextMove PCI-2
-
+TL084
47R
+12 V
-12 V
Demand0
AGND2
1
‘X7’
Demanda±100%
Módulo de distribución
cable de 100
vías
Demand0
AGND 2
1
‘X7’
13
12
AIN0+
AIN0-
‘X3’
3Conecte todo el
blindado en un solo extremo
Entrada de demanda ±10 VCC del amplificador de accionamiento
MicroFlex/amplificador de accionamiento
cable de 100
vías
Módulo de distribución
Pantalla
Demand0
AGND 2
1
‘X7’
1
2
AIN0+
AIN0-
‘X1’
3Conecte todo el
blindado en un solo extremo
Entrada de demanda ±10 VCC del amplificador de accionamiento
FlexDriveII /amplificador de accionamiento
cable de 100
vías
Módulo de distribución
Pantalla
4-8 Entrada/Salida MN1933WES

4.4 Entrada/Salida (I/O) digitalEl NextMove PCI-2 proporciona:
20 entradas digitales para uso general.
12 salidas digitales para uso general.
4.4.1 Entradas digitales - resumenExisten un total de 20 entradas digitales de propósito general. Las entradas puedenconfigurarse en Mint para cualquiera de las siguientes funciones:
Entrada límite adelante (fin de carrera) para cualquier eje.
Entrada límite atrás (fin de carrera) para cualquier eje.
Entrada de inicio para cualquier eje.
Entrada de error de accionamiento para cualquier eje.
Las entradas pueden ser compartidas entre ejes, y son programables en Mint (utilizando las palabras clave INPUTACTIVELEVEL, INPUTDEBOUNCE, INPUTMODE, INPUTNEGTRIGGER y INPUTPOSTRIGGER) para determinar su nivel activo y si deben ser disparadas por flanco. Cuatro de las entradas, DIN0-DIN3, son entradas de memoria latch de posición rápida.
Las entradas utilizan dos conexiones comunes separadas. Esto puede ser útil para la separación de entradas que son activas a nivel bajo de otras que son activas a nivel alto. Si todas las entradas son similares, entonces los comunes pueden conectarse juntos formando así una única conexión común. La disposición de las entradas, su conexión de alimentación común y los conectores con los que están disponibles se describen en la Tabla 2:
MN1933WES Entrada/Salida 4-9

Entrada Común Conector de módulo de distribución
DIN0
Común1
X3 - Entradas de posición rápidaDIN1
DIN2
DIN3
DIN4
X2 - Entradas de propósito general
DIN5
DIN6
DIN7
DIN8
Común2
DIN9
DIN10
DIN11
DIN12
X1 - Entradas de propósito general
DIN13
DIN14
DIN15
DIN16
DIN17
DIN18
DIN19
Tabla 2: Disposición de entradas digitales
4-10 Entrada/Salida MN1933WES

4.4.2 Entradas digitales - X1
Las entradas digitales DIN12 a DIN19 tienen una especificación común:
Entradas digitales ópticamente aisladas de propósito general.
Frecuencia de muestreo 1 kHz.
Las entradas quedan condicionadas empleando filtros RC pasa-bajos y buffers Schmitt-trigger. Si se configura una entrada con activación por cambios de nivel (flanco), el pulso deactivación debe durar al menos 1 ms (un escáner de software) para garantizar la aceptaciónde Mint. Las tensiones por debajo de 2 V se consideran como nivel de 0 V. Se recomienda elempleo de cable blindado para las entradas.
Activo a nivel alto: las entradas digitales se encontrarán activas cuando les sea aplicadoun voltaje de +24 V CC (±20%) y consumirán un máximo de 8 mA cada una.
Activo a nivel bajo: las entradas digitales se encontrarán activas cuando sean puestas atierra (< 2 V) y generarán un máximo de 8 mA cada una.
Nota: Tensiones de entrada sostenidas por encima de 30 V dañarán las entradas.
Ubicación Módulo de distribución, conector X1
Terminal NombrePalabra clave de Mint/descripción
Común
1 Pantalla Conexión blindada
2 DIN12 INX(12)
Común2
3 DIN13 INX(13)
4 DIN14 INX(14)
5 DIN15 INX(15)
6 DIN16 INX(16)
7 DIN17 INX(17)
8 DIN18 INX(18)
9 DIN19 INX(19)
10 Pantalla Conexión blindada
11 - (NC)
12 Común2 Conexión común
1
12
MN1933WES Entrada/Salida 4-11

Figura 6: Circuito de entrada digital - se muestra DIN12
4.4.3 Entradas digitales - X2
Las entradas digitales DIN4 a DIN11 son eléctricamente idénticas a las entradas DIN12 aDIN19, descritas en la sección 4.4.2.
Ubicación Módulo de distribución, conector X2
Terminal NombrePalabra clave de Mint/descripción
Común
1 Pantalla Conexión blindada
2 DIN4 INX(4)
Común13 DIN5 INX(5)
4 DIN6 INX(6)
5 DIN7 INX(7)
6 DIN8 INX(8)
Común27 DIN9 INX(9)
8 DIN10 INX(10)
9 DIN11 INX(11)
10 Pantalla Conexión blindada
11 Común1 Conexión común
12 Común2 Conexión común
3k3
TLP280
DGND
Vcc
Common2
DIN12 2
12
‘X1’
MintINX(12)
Módulo de distribución
NextMove PCI-2
Activo a nivel alto:DINx = 12-24 V CC (±20%)Common2 = 0V
Activo a nivel bajo:DINx = 0 VCommon2 = 12-24 V CC (±20%)
cable de 100
vías
1
12
4-12 Entrada/Salida MN1933WES
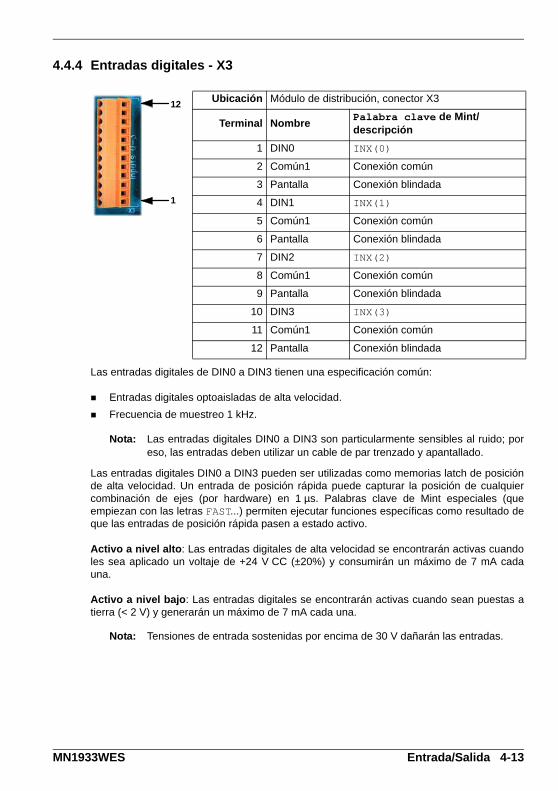
4.4.4 Entradas digitales - X3
Las entradas digitales de DIN0 a DIN3 tienen una especificación común:
Entradas digitales optoaisladas de alta velocidad.
Frecuencia de muestreo 1 kHz.
Nota: Las entradas digitales DIN0 a DIN3 son particularmente sensibles al ruido; poreso, las entradas deben utilizar un cable de par trenzado y apantallado.
Las entradas digitales DIN0 a DIN3 pueden ser utilizadas como memorias latch de posiciónde alta velocidad. Un entrada de posición rápida puede capturar la posición de cualquiercombinación de ejes (por hardware) en 1 µs. Palabras clave de Mint especiales (queempiezan con las letras FAST...) permiten ejecutar funciones específicas como resultado deque las entradas de posición rápida pasen a estado activo.
Activo a nivel alto: Las entradas digitales de alta velocidad se encontrarán activas cuandoles sea aplicado un voltaje de +24 V CC (±20%) y consumirán un máximo de 7 mA cadauna.
Activo a nivel bajo: Las entradas digitales se encontrarán activas cuando sean puestas atierra (< 2 V) y generarán un máximo de 7 mA cada una.
Nota: Tensiones de entrada sostenidas por encima de 30 V dañarán las entradas.
Ubicación Módulo de distribución, conector X3
Terminal NombrePalabra clave de Mint/descripción
1 DIN0 INX(0)
2 Común1 Conexión común
3 Pantalla Conexión blindada
4 DIN1 INX(1)
5 Común1 Conexión común
6 Pantalla Conexión blindada
7 DIN2 INX(2)
8 Común1 Conexión común
9 Pantalla Conexión blindada
10 DIN3 INX(3)
11 Común1 Conexión común
12 Pantalla Conexión blindada
1
12
MN1933WES Entrada/Salida 4-13

Figura 7: Circuito de entrada digital - interrupciones rápidas - se muestra DIN0
3k3
TLP115A
DGND
Vcc
DIN0 1
2
‘X3’
Common1
MintINX(0)
Módulo de distribución
NextMove PCI-2
Activo a nivel alto:DINx = 12-24 V CC (±20%)Common1 = 0V
Activo a nivel bajo:DINx = 0 VCommon1 = 12-24 V CC (±20%)
cable de 100
vías
4-14 Entrada/Salida MN1933WES

4.4.5 Salidas digitales - resumenExisten un total de 12 salidas digitales de propósito general. Puede configurarse una salida en Mint como salida de propósito general, como salida de habilitación de accionamiento o como salida de error general. Las salidas pueden ser compartidas entre ejes y son programables, utilizando la palabra clave de Mint OUTPUTACTIVELEVEL) para determinar su nivel activo.
Están disponibles dos tipos de salida, dependiendo del modelo de NextMove PCI-2:
Generación de corriente PNP (PCI201-50x).
Consumo de corriente PNP (PCI201-51x).
En todos los modelos, la totalidad del grupo de salidas está protegida por un fusibleautoreinicializable de 1,5 A. El fusible puede necesitar unos segundos para reinicializarsedespués de haber eliminado la carga.
Los canales paso a paso no utilizados pueden disponer de sus terminales de pulso ydirección para que sean utilizados como salidas. Ver las palabras clave de Mint CONFIG ySTEPPERIO.
4.4.6 Salidas digitales - X4
Las salidas digitales DOUT6 a DOUT11 tienen una especificación común:
Salidas digitales ópticamente aisladas de propósito general.
Corriente de salida: 50 mA máximo cada salida.
Frecuencia de actualización: Inmediato.
Ubicación Módulo de distribución, conector X4
Terminal NombrePalabra clave de Mint/descripción
1 Pantalla Conexión blindada
2 DOUT6 OUTX(6)
3 DOUT7 OUTX(7)
4 DOUT8 OUTX(8)
5 DOUT9 OUTX(9)
6 DOUT10 OUTX(10)
7 DOUT11 OUTX(11)
8 - (NC)
9 - (NC)
10 Pantalla Conexión blindada
11 USR V+ Suministro de energía del cliente
12 CGND Puesta a tierra del suministro de energía del cliente.
1
12
MN1933WES Entrada/Salida 4-15

Cada salida optoaislada ha sido diseñada para generar corriente a partir del suministrode12-24 V de cliente (USR V+) tal como se muestra en la Figura 8. Se recomienda elempleo de cable blindado. El CGND debe estar conectado a la tierra (GND) del PC anfitrión.Ver la sección 4.5.2 para los detalles relativos a la conexión del suministro USR V+.
Figura 8: Circuito de salida digital con salidas de fuente de corriente 'PNP' estándar - se muestra DOUT6
Figura 9: Circuito de salida digital con salidas de consumo de corriente 'NPN' opcionales - se muestra DOUT6
TLP281
NextMove PCI-2
UDN2982
1.5 A
USR V+
DOUT6
CGND
2
11
12
‘X4’
Suministro de usuario de 24V
Puesta a tierra del suministro de usuario
Carga de salida
MintOUTX(6)
Módulo de distribución
cable de 100
vías
Regulador de tensión
Fusible
DOUT6
CGND
2
11
12
‘X4’
TLP281
NextMove PCI-2
1.5 A
ULN2003
USR V+
Suministro de usuario de 24V
Puesta a tierra del suministro de usuario
Carga de
MintOUTX(6)
Módulo de distribución
cable de 100
víasRegulador de tensión
Fusible
4-16 Entrada/Salida MN1933WES

4.4.7 Salidas digitales - X5
Las salidas digitales DOUT0 a DOUT5 son eléctricamente idénticas a las salidas DOUT6 aDOUT11, descritas en la sección 4.4.6.
Ubicación Módulo de distribución, conector X5
Terminal NombrePalabra clave de Mint/descripción
1 Pantalla Conexión blindada
2 DOUT0 OUTX(0)
3 DOUT1 OUTX(1)
4 DOUT2 OUTX(2)
5 DOUT3 OUTX(3)
6 DOUT4 OUTX(4)
7 DOUT5 OUTX(5)
8 - (NC)
9 - (NC)
10 Pantalla Conexión blindada
11 USR V+ Suministro de energía del cliente
12 CGND Puesta a tierra del suministro de energía del cliente.
1
12
MN1933WES Entrada/Salida 4-17

4.5 Otras E/S
4.5.1 Entradas de encoder - X12, X13, X14, X15, X16
Pueden conectarse hasta cinco encoders incrementales al NextMove PCI-2. Cada entradade encoder incluye entradas de canal complementarias A, B y Z en un conector hembra tipoD de 9 terminales. Cada canal de entrada utiliza un receptor de línea diferencial MAX3096con resistencias terminales y pull-up. Los encoders deben proporcionar bien señalesdiferenciales de 5 V o señales diferenciales RS422/RS485. La frecuencia máxima deentrada es de 10 millones de conteos por cuadratura por segundo. Esto equivale a unafrecuencia máxima de 2,5 MHz para las señales A y B. El apantallamiento del conector estáconectado al terminal 4. Se recomienda el empleo de cable individual de par trenzado yapantallado. Ver la sección 4.5.2 para los detalles relativos a la fuente de alimentación delencoder.
Figura 10: Circuito de entrada de canal de encoder - se muestra canal A, encoder C
UbicaciónMódulo de distribución, conectores X12, X13, X14, X15, X16
Terminal Nombre Descripción
1 Encoder V+ Suministro de energía al encoder
2 CHZ+ Señal de canal de índice
3 CHB- Complemento de señal de canal B
4 Pantalla Conexión blindada
5 CHA+ Señal de canal A
6 CHZ- Complemento de señal de canal de índice
7 GND Tierra del suministro de alimentación
8 CHB+ Señal de canal B
9 CHA- Complemento de señal de canal A
15
69
CHA-
CHA+
Vcc
MAX3096150R 3k3
3k3
5
9
‘X12’
Circuito de entrada de
Módulo de distribución
cable de 100
vías
NextMove PCI-2
4-18 Entrada/Salida MN1933WES

4.5.1.1 Frecuencia de entrada del encoder
La frecuencia máxima de entrada del encoder es de aproximadamente 10 millones deconteos por cuadratura por segundo. Esto equivale a una frecuencia de 2,5 MHz para lasseñales A y B. Sin embargo, la frecuencia máxima alcanzable se verá afectada por lalongitud de los cables del encoder, tal como se muestra en la Tabla 3:
La longitud máxima recomendada para el cable es de 30,5 m (100 pies).
Figura 11: Entrada C de encoder - conexión típica de un amplificador de accionamiento
(por ejemplo MicroFlex de ABB, FlexDriveII, Flex+DriveII o MintDriveII)
FrecuenciaLongitud máxima del cable
metros pies
1,3 MHz 2 6.56
500 kHz 10 32.8
250 kHz 20 65.6
100 kHz 50 164.0
50 kHz 100 328.1
20 kHz 300 984.2
10 kHz 700 2296.6
7 kHz 1000 3280.8
Tabla 3: Efecto de la longitud del cable sobre la frecuencia máxima del encoder
CHA-
CHA+5
9
4
7 DGND
CHA-
CHA+ 1
6
‘X7’
CHB-
CHB+8
3CHB-
CHB+ 2
7
CHZ-
CHZ+2
6CHZ-
CHZ+ 3
8
‘X12’ NextMove PCI-2
Par trenzado
Par trenzado
Par trenzado
MicroFlexFlexDriveII
Flex+DriveII
MintDriveII
salida del encoder
Conecte el blindado general a los blindados traseros del conector/conexiones blindadas
Pantalla
Conecte el blindado interno a DGND. No conecte el otro extremo.
Módulo de distribución
cable de 100
vías
MN1933WES Entrada/Salida 4-19
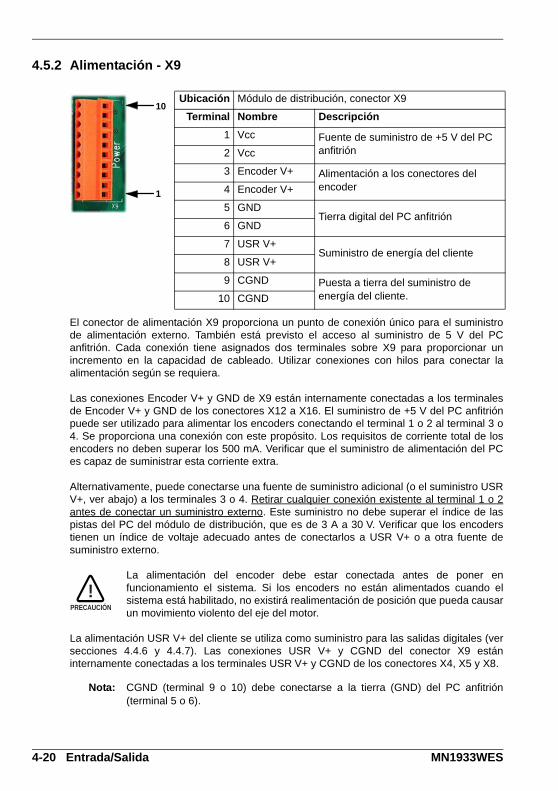
4.5.2 Alimentación - X9
El conector de alimentación X9 proporciona un punto de conexión único para el suministrode alimentación externo. También está previsto el acceso al suministro de 5 V del PCanfitrión. Cada conexión tiene asignados dos terminales sobre X9 para proporcionar unincremento en la capacidad de cableado. Utilizar conexiones con hilos para conectar laalimentación según se requiera.
Las conexiones Encoder V+ y GND de X9 están internamente conectadas a los terminalesde Encoder V+ y GND de los conectores X12 a X16. El suministro de +5 V del PC anfitriónpuede ser utilizado para alimentar los encoders conectando el terminal 1 o 2 al terminal 3 o4. Se proporciona una conexión con este propósito. Los requisitos de corriente total de losencoders no deben superar los 500 mA. Verificar que el suministro de alimentación del PCes capaz de suministrar esta corriente extra.
Alternativamente, puede conectarse una fuente de suministro adicional (o el suministro USRV+, ver abajo) a los terminales 3 o 4. Retirar cualquier conexión existente al terminal 1 o 2antes de conectar un suministro externo. Este suministro no debe superar el índice de laspistas del PC del módulo de distribución, que es de 3 A a 30 V. Verificar que los encoderstienen un índice de voltaje adecuado antes de conectarlos a USR V+ o a otra fuente desuministro externo.
La alimentación del encoder debe estar conectada antes de poner enfuncionamiento el sistema. Si los encoders no están alimentados cuando elsistema está habilitado, no existirá realimentación de posición que pueda causarun movimiento violento del eje del motor.
La alimentación USR V+ del cliente se utiliza como suministro para las salidas digitales (versecciones 4.4.6 y 4.4.7). Las conexiones USR V+ y CGND del conector X9 estáninternamente conectadas a los terminales USR V+ y CGND de los conectores X4, X5 y X8.
Nota: CGND (terminal 9 o 10) debe conectarse a la tierra (GND) del PC anfitrión(terminal 5 o 6).
Ubicación Módulo de distribución, conector X9
Terminal Nombre Descripción
1 Vcc Fuente de suministro de +5 V del PC anfitrión2 Vcc
3 Encoder V+ Alimentación a los conectores del encoder4 Encoder V+
5 GNDTierra digital del PC anfitrión
6 GND
7 USR V+Suministro de energía del cliente
8 USR V+
9 CGND Puesta a tierra del suministro de energía del cliente.10 CGND
1
10
!PRECAUCIÓN
4-20 Entrada/Salida MN1933WES

4.5.3 Alimentación de relé y de CAN - X8
El conector X8 proporciona un punto de conexión para el suministro de la alimentación CANy los contactos de relé. El canal CANopen (CAN1) está aislado y requiere un suministro de12-24 V CC, 60 mA (terminales 1 y 2). Estos terminales están conectados internamente alos terminales 9 y 3 del conector X17 (ver la sección 4.6.1).
El canal CAN de Baldor (CAN2) normalmente no está aislado y por tanto no necesita unafuente de alimentación. Sin embargo, puede que sea necesario para algunos nodos CAN deBaldor una derivación del suministro de 12-24 V desde el cable CAN. Por esta razón, X8proporciona un punto de conexión adecuado para el suministro (terminales 3 y 4). Estosterminales están conectados internamente a los terminales 5 y 4 del conector X18 (ver lasección 4.6.3).
Los terminales de relé están aislados de cualquier otro circuito interno del NextMove PCI-2.El relé está controlado por una memoria latch, que se borra cuando el NextMove PCI-2 sereinicializa. La reinicialización puede producirse debido a una caída de alimentación, unerror del circuito de vigilancia (watchdog) o cuando deliberadamente así lo origina el PCanfitrión. Durante el funcionamiento normal el contacto del relé NO (normalmente abierto)está conectado a COM del relé. El relé está excitado durante el funcionamiento normal yconstituye el canal de salida de error global prefijado en fábrica. En el caso de un error o depérdida de la alimentación de la tarjeta, el relé queda desexcitado y el contacto de relé NC(normalmente cerrado) está conectado a la conexión común de relé.
Ubicación Módulo de distribución, conector X8
Terminal Nombre Descripción
1 CAN1 V+ Entrada de alimentación para CAN1 (CANopen) red (12-24 V CC)
2 Puesta a tierra (GND) de CAN1
Tierra para red CAN1 (CANopen)
3 CAN2 V+ Entrada de alimentación para CAN2 (CAN de Baldor) red (12-24 V CC)
4 Puesta a tierra (GND) de CAN2
Tierra para red CAN2 (CAN de Baldor)
5 Relé NC Conexión de relé normalmente cerrada
6 Relé NO Conexión de relé normalmente abierta
7 Relé COM Conexión de relé común
8 USR V+ Suministro de energía del cliente
9 CGND Puesta a tierra del suministro de energía del cliente.
10 Pantalla Conexión blindada
1
10
MN1933WES Entrada/Salida 4-21

Figura 12: Conexiones de relé
4.5.4 Salidas de control paso a paso - X10, X11
Se proporcionan cuatro juegos de salidas de control paso a paso en los conectores tipo Dhembra de 9 terminales. Las salidas de control paso a paso pueden funcionar a hasta3 MHz. Los conectores tipo D de 9 terminales proporcionan blindado de 360 ° en el caso deque se utilicen altos índices de paso.
Las señales del NextMove PCI-2 son niveles TTL pero se convierten a señales deaccionamiento diferencial de 5 V mediante un placa de circuito montada en el módulo dedistribución. Sin embargo, las salidas pueden conectarse directamente a los accionamientoscon entradas lógicas de terminal único, conectando solo las salidas positivas (STEPx+,DIRx+) y GND al accionamiento. Los complementos (STEPx-, DIRx-) deben dejarsedesconectados. Las salidas pueden ser programadas en Mint para las funciones siguientes:
Paso y dirección para controlar los accionamientos de motores paso a paso. El asistentede configuración de ejes de Mint WorkBench (o las palabras clave de Mint CONFIG yAXISCHANNEL ) pueden utilizarse para asignar canales de paso a los ejes.
Ubicación Módulo de distribución, conector X8
TerminalNombre X10
Nombre X11
Descripción
1 STEP0+ STEP2+ Señal paso a paso
2 DIR0+ DIR2+ Señal de dirección
3 GND GND Tierra de la señal
4 DIR1+ DIR3+ Señal de dirección
5 STEP1+ STEP3+ Señal paso a paso
6 STEP0- STEP2- Complemento de señal paso a paso
7 DIR0- DIR2- Complemento de señal de dirección
8 DIR1- DIR3- Complemento de señal de dirección
9 STEP1- STEP3- Complemento de señal paso a paso
Mint
NextMove PCI-2
5
7
6
‘X4’
Relé
Módulo de distribución
Relé NC
Relé NO
Relé COM
1 5
6 9
4-22 Entrada/Salida MN1933WES

Salidas digitales para empleo de propósito general. Ver la palabra clave de MintSTEPPERIO para más detalles.
Puede utilizarse la palabra clave FREQ para controlar directamente la frecuencia de salida -ver el archivo deayuda de Mint.
4.5.5 Conexión del emuladorUn espacio para 11 terminales en la parte posterior de la tarjeta con la identificación 'ICE'proporciona acceso al procesador para la emulación de exploración de contorno. Paraconectar el zócalo emulador de Texas Instruments, debe incorporarse un cabezal de dosfilas de 12 terminales de paso 0,1 pulgadas de montaje en superficie, con el terminal 8faltante. Los conectores son aquellos especificados por Texas Instruments. Ver la "Guía deprogramación embebida de Mint" en cuanto a los detalles de la depuración del sistema enbase a emulador.
MN1933WES Entrada/Salida 4-23

4.6 CANEl bus CAN es una red con base en serie que se desarrolló originalmente para aplicacionesautomotrices, pero que ahora se utiliza para una gran diversidad de aplicacionesindustriales. Ofrece comunicaciones en serie de bajo coste con una muy alta fiabilidad en el
entorno industrial, siendo la probabilidad de un error no detectado de 4,7x10-11. Óptimo parala transmisión de pequeños paquetes de datos y, por tanto, ofrece una rápida actualizaciónde los dispositivos de entrada/salida (dispositivos periféricos) conectados al bus.
El protocolo CAN solo define los atributos físicos de la red, referentes a los parámetroseléctricos, mecánicos, funcionales y procedimentales de la conexión física entredispositivos. La funcionalidad de red de mayor nivel viene definida por un determinadonúmero de estándares y protocolos registrados; CANopen es uno de los estándares másutilizados para control de máquinas en el ámbito de las industrias como las de máquinas deembalaje e impresión.
Además de soportar CANopen, Baldor ha desarrollado un protocolo registrado denominadoCAN Baldor. Ambos protocolos están soportados por el NextMove PCI-2, pero no a la vez.Esto es porque el NextMove PCI-2 solo dispone de un único canal de hardware CAN. Seencuentran disponibles estructuras de firmware por separado para soportar cada uno de losprotocolos.
Para determinar qué firmware se encuentra instalado actualmente, arrancar MintWorkBench y conectar el NextMove PCI-2 (ver sección 5). En la parte inferior de la ventanade Mint WorkBench la barra de estado mostrará el nombre del controlador, seguido de‘CANopen’ o ‘Baldor CAN’. Si no se muestra la opción correcta, será necesario descargarfirmware alternativo empleando el archivo de instalación del sistema y/o los elementos delmenú de firmware de descarga de Mint WorkBench. El archivo de firmware puedeencontrarse en el CD de herramientas de Mint Motion (OPT-SW-001), o descargarse desdewww.abbmotion.com. Ver el archivo de ayuda de Mint para más detalles acerca de ladescarga de firmware.
4-24 Entrada/Salida MN1933WES

4.6.1 Conector CANopen - X17
Las conexiones CANopen se realizan empleando el conector X17 del módulo dedistribución. Se trata de un conector tipo D macho de 9 terminales con configuración determinales estándar CiA DS102. La máxima velocidad (por defecto) de transmisión delNextMove PCI-2 es de 500 Kbit/s.
4.6.2 CANopenEl NextMove PCI-2 debe tener el firmware CAN cargado para utilizar este protocolo.
Baldor ha implementado un protocolo de CANopen en Mint (según el 'Perfil decomunicación' CiA DS-301) que es compatible con ambos accesos directos para parámetrosde dispositivos y comunicación de datos de proceso de tiempo crítico. El diseño delNextMove PCI-2 no satisface un perfil de dispositivo CANopen específico (DS4xx), aunquees capaz de soportar y establecer comunicación con los siguientes dispositivos:
Cualquier dispositivo de E/S digital y analógico de terceros que cumpla con el 'Perfil dedispositivos para módulos genéricos de E/S' (CiA DS-401).
Los paneles de operador HMI (interfaz máquina hombre) de Baldor, basados en el 'Perfilde dispositivo para interfaces máquina hombre' (DS403).
Otros controladores ABB con CANopen para acceso peer-to-peer, utilizandoextensiones a las especificaciones CiA (DS301 y DS302).
La funcionalidad y las características de todos los dispositivos CANopen de Baldor estándefinidas en las Hojas de datos electrónicos (EDS) con estándares individuales (formatoASCII), que se pueden encontrar en el CD de herramientas de Mint Motion (OPT-SW-001) opueden descargarse de www.abbmotion.com.
La Figura 13 muestra una red CANopen típica con dos unidades de NextMove PCI-2 y unpanel de operador HMI de Baldor.
Ubicación Módulo de distribución, conector X17
Terminal Nombre Descripción
1 Pantalla Pantalla del cable
2 CAN1_L Canal negativo 1 de CAN
3 Puesta a tierra (GND) de CAN1
CAN1 Tierra/referencia de masa
4 - (NC)
5 - (NC)
6 - (NC)
7 CAN1_H Canal 1 positivo de CAN
8 - (NC)
9 CAN1 V+ Alimentación CAN1 (12-24 V CC)
1 5
6 9
MN1933WES Entrada/Salida 4-25

Figura 13: Conexiones de red típica CANopen
Nota: El canal CAN de NextMove PCI-2 está optoaislado, de forma que debe aplicarseuna tensión de entre 12-24 V CC al terminal 5 del conector CAN.
La configuración y la administración de una red CANopen la debe llevar a cabo un nodoúnico que actúe como master de la red. Esta función la puede realizar el NextMove PCI-2cuando está configurado para ser el nodo Administrador de red (ID 1 de nodo) o por undispositivo maestro CANopen de terceros.
Se pueden añadir hasta 126 nodos CANopen (ID de nodos 2 a 127) a la red mediante unnodo administrador del NextMove PCI-2, utilizando la palabra clave de Mint NODESCAN. Siesto funciona, los nodos podrán luego conectarse utilizando la palabra clave de MintCONNECT. Cualquier evento relacionado con la red y el nodo se puede supervisar utilizandoel evento de Mint BUS1.
Nota: Todas las palabras clave de Mint relacionadas con CAN tienen referencia conCANopen o Baldor CAN mediante el parámetro de punto “bus”. A pesar de queel NextMove PCI-2 posee un único canal físico de bus CAN que puede serutilizado para soportar cualquier protocolo, Mint distingue entre los protocoloscon el parámetro de punto 'bus'. Para CANopen, el parámetro de punto 'bus'debe establecerse en 1.
Consulte el archivo de ayuda de Mint para más detalles sobre CANopen, palabras clave deMint y parámetros de punto.
7
2
3
9
7
2TR TR
7
2
3
9
7
2
3
924V
0V6
5
1
2
24V
0V
CAN1_H
CAN1_L
Módulo de distribución X17
Módulo de distribución X17
Nodo de extremo
Pares trenzadosPares
trenzados
Panel de operador HMI de Baldor
Bloque de terminales de fuente
de suministro
CANopen tipo “D”
4-26 Entrada/Salida MN1933WES

4.6.3 Conector Baldor CAN - X18
Las conexiones CAN de Baldor se realizan empleando el conector X18 del módulo dedistribución RJ45. Si el NextMove PCI-2 se encuentra en el extremo de la red CAN deBaldor será necesario conectar una resistencia terminal, lo que se consigue incorporando elpuente J7 terminal, etiquetado como 'BC Term', en el módulo de distribución.
4.6.4 CAN BaldorEl NextMove PCI-2 debe tener el firmware CAN de Baldor cargado para utilizar esteprotocolo.
El CAN de Baldor es un protocolo CAN registrado basado en CAL. Soporta únicamente lasiguiente gama de nodos de Entrada/Salida específicos y paneles de operador de CAN deBaldor:
Nodo de entrada 8 (pieza ION001-503) - un nodo CAN de entrada digital x 8.
Nodo de salida 8 (pieza ION003-503) - un nodo CAN de salida digital x 8.
Nodo de relé 8 (pieza ION002-503) - un nodo CAN de relé x 8.
Nodo Io 24/24 (pieza ION004-503) - nodo de CAN de entrada digital x 24 y salidadigital x 24.
Nodo de teclado (pieza KPD002-501) - nodo CAN de panel de operador con pantallaLCD 4 x 20 y 27 teclas de membrana etiquetadas para control de 3 ejes (X, Y, Z).
Nodo de teclado 4 (pieza KPD002-505) - nodo CAN de panel de operador con pantallaLCD 4 x 20 y 41 teclas de membrana etiquetadas para control de 4 ejes (1, 2, 3, 4).
Una red CAN Baldor típica con un NextMove PCI-2 y un panel de operador CAN Baldor semuestra en la Figura 18.
Ubicación Módulo de distribución, conector X18
Terminal Nombre Descripción
1 - (NC)
2 - (NC)
3 - (NC)
4 CAN2 0V Referencia tierra/masa para señales CAN
5 CAN2 V+ Nodo de alimentación remoto CAN V+ (12-24 V CC)
6 - (NC)
7 CAN2_H Canal 2 positivo de CAN
8 CAN2_L Canal negativo 2 de CAN
1 8
MN1933WES Entrada/Salida 4-27
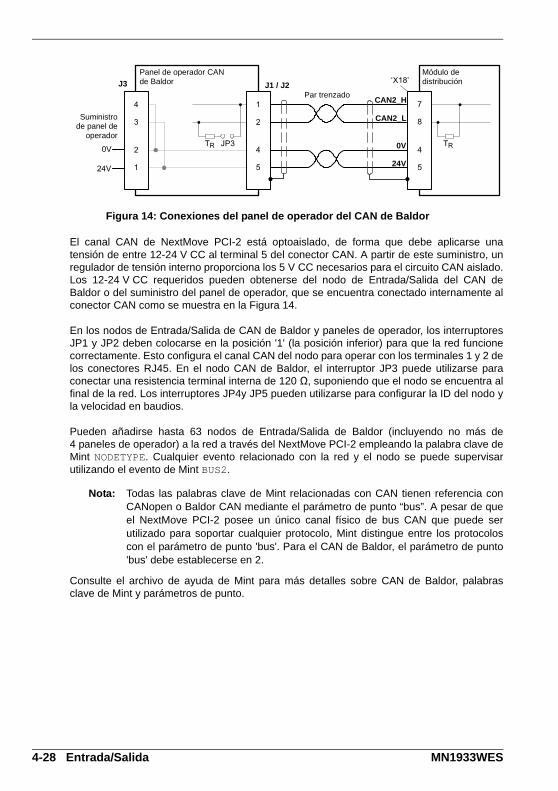
Figura 14: Conexiones del panel de operador del CAN de Baldor
El canal CAN de NextMove PCI-2 está optoaislado, de forma que debe aplicarse unatensión de entre 12-24 V CC al terminal 5 del conector CAN. A partir de este suministro, unregulador de tensión interno proporciona los 5 V CC necesarios para el circuito CAN aislado.Los 12-24 V CC requeridos pueden obtenerse del nodo de Entrada/Salida del CAN deBaldor o del suministro del panel de operador, que se encuentra conectado internamente alconector CAN como se muestra en la Figura 14.
En los nodos de Entrada/Salida de CAN de Baldor y paneles de operador, los interruptoresJP1 y JP2 deben colocarse en la posición '1' (la posición inferior) para que la red funcionecorrectamente. Esto configura el canal CAN del nodo para operar con los terminales 1 y 2 delos conectores RJ45. En el nodo CAN de Baldor, el interruptor JP3 puede utilizarse paraconectar una resistencia terminal interna de 120 Ω, suponiendo que el nodo se encuentra alfinal de la red. Los interruptores JP4y JP5 pueden utilizarse para configurar la ID del nodo yla velocidad en baudios.
Pueden añadirse hasta 63 nodos de Entrada/Salida de Baldor (incluyendo no más de4 paneles de operador) a la red a través del NextMove PCI-2 empleando la palabra clave deMint NODETYPE. Cualquier evento relacionado con la red y el nodo se puede supervisarutilizando el evento de Mint BUS2.
Nota: Todas las palabras clave de Mint relacionadas con CAN tienen referencia conCANopen o Baldor CAN mediante el parámetro de punto “bus”. A pesar de queel NextMove PCI-2 posee un único canal físico de bus CAN que puede serutilizado para soportar cualquier protocolo, Mint distingue entre los protocoloscon el parámetro de punto 'bus'. Para el CAN de Baldor, el parámetro de punto'bus' debe establecerse en 2.
Consulte el archivo de ayuda de Mint para más detalles sobre CAN de Baldor, palabrasclave de Mint y parámetros de punto.
J1 / J2
24V
0VTR
24V
0V
J3
CAN2_L
CAN2_H1
2
4
5
4
3
2
1
7
8
4
5
JP3 TR
‘X18’Módulo de distribución
Par trenzado
Panel de operador CAN de Baldor
Suministrode panel de
operador
4-28 Entrada/Salida MN1933WES

4.6.5 Cableado de CANSolo se puede alcanzar una velocidad de transmisión de bits por CAN con muy pocoserrores utilizando un esquema de cableado en el que se tengan en cuenta los siguientespuntos: La línea de bus de datos de dos hilos se puede enrutar de manera paralela, trenzada y/
o blindada, dependiendo de los requisitos EMC. ABB recomienda un cable de partrenzado con el blindado/pantalla conectado al blindado trasero del conector, parareducir las emisiones de RF y proporcionar inmunidad para posibles interferenciasconducidas.
El bus debe estar conectado solo en ambos extremos (no en puntos intermedios) conresistencias de valor nominal 120 Ω. De esta manera se reducen las reflexiones de lasseñales eléctricas del bus, lo que ayuda a un nodo a interpretar correctamente losniveles de tensión del bus. Si el NextMove PCI-2 se encuentra en el extremo de la red,asegurarse entonces que se incorpora el puente adecuado en la placa de distribución.Esto conectará una resistencia terminal interna. Para el bus de CANopen, deberáincorporarse el puente J8 etiquetado 'CO Term'. Para el bus CAN de Baldor, deberáincorporarse el puente J7 etiquetado 'BC Term'.
Todos los cables y conectores deberán tener una impedancia nominal de 120 Ω. Loscables deberán tener una resistencia lineal de 70 mΩ/m y un retardo nominal de línea de5 ns/m. ABB puede suministrar toda una gama de cables CAN adecuados, con losnúmeros de componente empezando por CBL004-5... .
La longitud máxima del bus depende de la configuraciónde sincronización de bits (velocidad de transmisión debaudios). La tabla contigua muestra la longitud máxima debus aproximada (en el peor caso), asumiendo un retardode propagación de 5 ns/m y un retardo de entrada y salidade dispositivo totalmente efectivo de 210 ns a 1 Mbit/s,300 ns a 500 - 250 Kbit/s, 450 ns a 125 Kbit/s y 1,5 ms a 50- 10 Kbit/s.
(1) velocidad de transmisión CAN no soportada porBaldor CAN.
(2) Para longitudes de bus superiores a aproximadamente1000 m, se necesitarán dispositivos repetidores opuentes.
El compromiso entre la longitud del bus y la velocidad de transmisión de baudios deCAN se debe determinar para cada aplicación. La velocidad de transmisión de baudiosde CAN se puede establecer utilizando la palabra clave BUSBAUD. Es fundamental quetodos los nodos en la red estén configurados para ejecutarse con la misma velocidad detransmisión de baudios.
La topología del cableado de una red CAN debe ser lo más parecida posible a laestructura de una línea o bus únicos. Sin embargo, se permiten líneas auxiliares si semantienen a una longitud mínima (< 0,3 m a 1 Mbit/s).
La conexión de 0 V de todos los nodos en la red debe estar unida a través de uncableado CAN. Esto garantiza que los niveles de señal CAN transmitidos por elNextMove PCI-2 o dispositivos CAN periféricos se encuentren dentro del rango de modocomún del circuito receptor de otros nodos en la red.
CANVelocidad de
MáximaLongitud
1 Mbit/s500 Kbit/s250 Kbit/s125 Kbit/s100 Kbit/s(1)
50 Kbit/s20 Kbit/s10 Kbit/s
25 m100 m250 m500 m600 m1000 m2500 m(2)
5000 m(2)
transmisión de baudios
del bus
MN1933WES Entrada/Salida 4-29

4.6.5.1 Optoaislamiento
En la placa de distribución del NextMovee PCI-2, el canal CAN se encuentra optoaislado.Debe aplicarse una tensión en el rango de 12-24 V al terminal 5 del conector CAN. A partirde este suministro, un regulador de tensión interno proporciona los 5 V CC a 100 mAnecesarios para el circuito CAN aislado. Los cables CAN provistos por ABB son de'categoría 5' y tienen una clasificación de corriente máxima de 1 A, de manera que elnúmero máximo de unidades de NextMove PCI-2 que se pueden utilizar en una red se limitaa diez. En la práctica el funcionamiento del canal CAN se limita a 500 Kbit/s debido alretardo en la propagación de los optoaisladores.
4.7 Estados de reinicializaciónDurante el encendido, el NextMove PCI-2 se mantiene en un estado seguro no operativoconocido como reinicialización de hardware. También pasará al estado de reinicialización dehardware si el suministro de 5 V CC cae por debajo de aproximadamente 4,75 V CC, paraimpedir un funcionamiento no controlado debido a la pérdida de la alimentación de laelectrónica. Cuando el NextMove PCI-2 se encuentra en estado de reinicialización dehardware por cualquier motivo, la mayoría de las interfases bajo control pasan a estadostambién conocidos. También es posible que el NextMove PCI-2 se encuentre en un estadoconocido como reinicialización de software. Se trata de un estado seguro operativo en elcual sólo funciona el firmware de carga de arranque presente en el NextMove PCI-2. Nodeben confundirse los estados de reinicialización de hardware y software con la palabraclave de Mint RESET que se utiliza para borrar errores de ejes.
ComunicacionesEn el encendido los controladores de CAN se mantendrán en reinicialización y no tendránefecto alguno sobre los buses CAN. Si se produce una reinicialización durante latransmisión de un mensaje, es probable que se generen errores CAN.La RAM de doble puerto (Dual Port RAM, DPR) no contendrá información durante elencendido, pero será accesible por parte del PC. Una reinicialización durante elfuncionamiento hará que la DPR permanezca en su estado en curso.
Salidas digitalesTodas las salidas digitales estarán inactivas en el encendido independientemente de supolaridad. Volverán a su estado inactivo en el momento en que se produzca unareinicialización.
Salidas analógicasTodas las salidas analógicas son fijadas a 0 V por hardware durante el encendido, yvolverán a 0 V cuando se produzca una reinicialización.
Paso a paso/EncoderDurante la reinicialización, las salidas paso a paso no generarán impulsos de paso, y lasentradas de encoder ino registrarán ninguna entrada de encoder. Si la unidad pasa a estadode reinicialización se perderán todos los datos de posición.
4.7.1 Vigilancia (watchdog) del sistemaLa vigilancia (watchdog) del sistema proporciona protección por hardware en el caso de malfuncionamiento de un programa 'C' embebido o de firmware. Si no se actualiza la vigilanciadel sistema, el controlador pasa a estado de reinicialización de software. Puede serinhabilitado durante el desarrollo y depuración de código embebido.
4-30 Entrada/Salida MN1933WES

4.8 Resumen de conexiones - cableado mínimo del sistemaComo guía, la Figura 15 muestra un ejemplo del cableado mínimo típico, necesario parapermitir que el NextMove PCI-2 y un amplificador de accionamiento de un solo eje funcionenconjuntamente. Los datos de los terminales del conector se muestran en la Tabla 4.
Figura 15: Ejemplo de cableado mínimo del sistema
NextMove PCI-2 X7X8
X12
X1
Amplificador de accionamientoMódulo de distribuciónPC anfitrión
Salida de error
Demanda+Demanda-
Habilitación*Gnd*
* Nota:Este diagrma muestra los contactos de relé que se utilizan como interruptores para la entrada de habilitación del amplificador del accionamiento.
Si el amplificador de accionamiento requiere una señal de habilitación de 24 V CC entonces:
- Conectar Gnd a CGND (X8 terminal 9).
- Conectar Habilitación (Enable) a un lado del relé (X8 terminal 5 para funcionamiento normalmente cerrado).
- Conectar el otro lado del relé (X8 terminal 7) a USR V+ (X terminal 8).
Cable de conexión de 100 vías
Salida del encoder desde el accionamiento o motor
MN1933WES Entrada/Salida 4-31

Las conexiones de los terminales en el ejemplo se describen a continuación:
Módulo dedistribución
conector
Terminal Nombre de la señal
Función Conexión al amplificador(Nota: las conexiones pueden etiquetarse de manera diferente)
X7 1 Demanda0 Señal de salida de demanda
Entrada de demanda+
2 AGND Entrada de demanda
X12 - Encoder Realimentación de posición
Salida de encoder (o directo del motor)
X1 2 DIN12Entrada de error Salida de error
12 Común2
X8 7 Relé COM Conexión de relé común
Entrada de habilitación
6 Relé NO Conexión normalmente abierta del relé
Amplificador/puesta a tierra digital
Tabla 4: Detalles del conector para el cableado mínimo del sistema mostrado en la Figura 15
4-32 Entrada/Salida MN1933WES

Funcionamiento5 Funcionamiento
5.1 IntroducciónEl software Mint WorkBench incluye un cierto número de aplicaciones y utilidades parapermitirle configurar, afinar y programar el NextMove PCI-2. Puede encontrarse MintWorkBench y otras utilidades en el CD de herramientas de Mint Motion (OPT-SW-001), odescargarse desde www.abbmotion.com.
5.1.1 Instalación del software del controladorCuando se encienda el ordenador anfitrión, Windows detectará automáticamente elNextMove PCI-2 y solicitará el controlador.
1. Cancelar las solicitudes de búsqueda del controlador. Instalar Mint WorkBench tal comose describe en la sección 5.1.2 siguiente, y reiniciar el PC.
2. Una vez finalizada la instalación de Mint WorkBench, aparecerá una nueva categoría decontrol de movimiento en el gestor de dispositivos de Windows.
El NextMove PCI-2 está ya ahora listo para ser configurado utilizando Mint WorkBench.
5.1.2 Instalación de Mint WorkBenchLa cuenta de usuario de Windows requiere derechos administrativos de usuario para lainstalación de Mint WorkBench. La instalación incluye la última versión del controlador dedispositivo USB.
5.1.2.1 Para la instalación de Mint WorkBench desde el CD (OPT-SW-001)
1. Introduzca el CD en la unidad.
2. El asistente de configuración se iniciará automáticamente unos segundos después. Si elasistente de configuración no aparece, seleccionar Ejecutar en el menú de inicio deWindows y escribir
d:\start
donde d representa la letra correspondiente a la unidad del dispositivo CD.
Siga las instrucciones de la pantalla para instalar el Mint WorkBench.
5.1.2.2 Para la instalación del Mint WorkBench desde el sitio web
Para la instalación del Mint WorkBench desde www.abbmotion.com, descartar la aplicacióny ejecutarla.
5
MN1933WES Funcionamiento 5-1
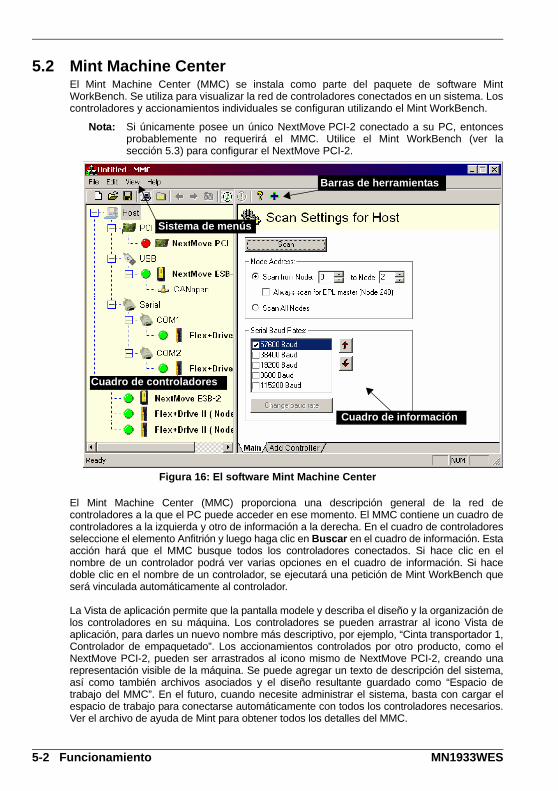
5.2 Mint Machine CenterEl Mint Machine Center (MMC) se instala como parte del paquete de software MintWorkBench. Se utiliza para visualizar la red de controladores conectados en un sistema. Loscontroladores y accionamientos individuales se configuran utilizando el Mint WorkBench.
Nota: Si únicamente posee un único NextMove PCI-2 conectado a su PC, entoncesprobablemente no requerirá el MMC. Utilice el Mint WorkBench (ver lasección 5.3) para configurar el NextMove PCI-2.
Figura 16: El software Mint Machine Center
El Mint Machine Center (MMC) proporciona una descripción general de la red decontroladores a la que el PC puede acceder en ese momento. El MMC contiene un cuadro decontroladores a la izquierda y otro de información a la derecha. En el cuadro de controladoresseleccione el elemento Anfitrión y luego haga clic en Buscar en el cuadro de información. Estaacción hará que el MMC busque todos los controladores conectados. Si hace clic en elnombre de un controlador podrá ver varias opciones en el cuadro de información. Si hacedoble clic en el nombre de un controlador, se ejecutará una petición de Mint WorkBench queserá vinculada automáticamente al controlador.
La Vista de aplicación permite que la pantalla modele y describa el diseño y la organización delos controladores en su máquina. Los controladores se pueden arrastrar al icono Vista deaplicación, para darles un nuevo nombre más descriptivo, por ejemplo, “Cinta transportador 1,Controlador de empaquetado”. Los accionamientos controlados por otro producto, como elNextMove PCI-2, pueden ser arrastrados al icono mismo de NextMove PCI-2, creando unarepresentación visible de la máquina. Se puede agregar un texto de descripción del sistema,así como también archivos asociados y el diseño resultante guardado como “Espacio detrabajo del MMC”. En el futuro, cuando necesite administrar el sistema, basta con cargar elespacio de trabajo para conectarse automáticamente con todos los controladores necesarios.Ver el archivo de ayuda de Mint para obtener todos los detalles del MMC.
Barras de herramientas
Cuadro de controladores
Sistema de menús
Cuadro de información
5-2 Funcionamiento MN1933WES

5.2.1 Inicio del MMC1. En el menú Inicio de Windows, seleccione Programas, Mint WorkBench, Mint Machine
Center.
2. En el cuadro de controladores, asegúrese de queesté seleccionado Anfitrión. En el cuadro deinformación, haga clic en Buscar.
3. Una vez finalizada la búsqueda, hacer clic una vez'NextMove PCI-2' en el cuadro de controladorespara seleccionarlo.
MN1933WES Funcionamiento 5-3

4. El NextMove PCI-2 aún no ejecutará ningúnfirmware, por lo que ahora este deberá serinstalado.
Hacer clic en la pestaña de Firmware en la parteinferior del cuadro de información.
5. En la tabla, hacer clic sobre la estructura defirmware más reciente. Si no hay ningún firmware en la lista, hacer clic enInstalar archivo de sistema... y encontar unarchivo .msx adecuado. Estos se encuentrandisponibles en www.abbmotion.com.
6. Hacer clic en Descargar al controlador.
Una vez descargado el firmware, el icono situado allado de 'NextMovePCI-2 Card 0' en el cuadro decontroladores quedará marcado en color verde.
7. Hacer clic en la pestaña principal en la parteinferior del cuadro de información, luego hacer clicen Lanzar WorkBench.
Con ello se abrirá una petición de Mint WorkBench.El NextMove PCI-2 ya estará vinculado a lapetición de Mint WorkBench y estará listo paraconfigurarse.
5-4 Funcionamiento MN1933WES

5.3 Mint WorkBenchMint WorkBench es una aplicación totalmente caracterizada para la programación y controldel NextMove PCI-2. La ventana principal de Mint WorkBench contiene un sistema demenús, el cuadro de herramientas y otras barras de herramientas. Se puede acceder amuchas funciones desde el menú o haciendo clic en un botón; puede usar la opción queprefiera. La mayoría de los botones incluyen un “consejo de herramienta”; mantenga elpuntero del ratón encima del botón (no haga clic) y aparecerá su descripción.
Figura 17: El software Mint WorkBench
Barras de herramientas
Sistema de menús
Cuadro de herramientas
Área de controly pruebas
MN1933WES Funcionamiento 5-5

5.3.1 Archivo de ayudaEl Mint WorkBench incluye un archivo de ayuda completo que contiene información sobretodas las palabras clave de Mint, cómo usar el Mint WorkBench y la informacióncomplementaria sobre temas de control de movimientos. Este archivo de ayuda se puedevisualizar en cualquier momento pulsando F1. A la izquierda de la ventana de ayuda, la
pestaña Contenido muestra una estructura de árbol del archivo de ayuda; cada libro
contiene varios temas . La pestaña Índice proporciona una lista alfabética de todos lostemas en el archivo y permite buscarlos por nombre. La pestaña Buscar permite buscarpalabras o frases que aparezcan en cualquier parte del archivo de ayuda. Muchas palabrasy frases se encuentran subrayadas y resaltadas con un color (normalmente azul) paraindicar que son vínculos. Haga clic en el vínculo para ir a una palabra clave asociada. Lamayoría de los temas de palabras clave comienzan con una lista de vínculos relevantes através de Ver también.
Figura 18: Mint WorkBench archivo de ayuda
Para obtener ayuda sobre cómo usar el Mint WorkBench, haga clic en la pestaña Contenido
y luego en el signo de adición pequeño junto al icono del libro del Mint WorkBench &
Mint Machine Center. Haga doble clic en el nombre de un tema para visualizarlo.
5-6 Funcionamiento MN1933WES

5.3.2 Inicio del Mint WorkBench
Nota: Si ya ha utilizado el MMC para instalar firmware e iniciar una petición del MintWorkBench, vaya directamente a la sección 5.4 para continuar la configuración.
1. En el menú Inicio de Windows, seleccione Programas, Mint WorkBench, MintWorkBench.
2. En el cuadro de diálogo que se abra, haga clic en Iniciar nuevo proyecto... .
MN1933WES Funcionamiento 5-7

3. En el diálogo de selección de controlador, dirigirse al cuadro desplegable cerca de laparte superior y seleccionar No buscar puertos serie.
Haga clic en Buscar para localizar el NextMove PCI-2.
Cuando la búsqueda se haya completado, haga clic en "NextMove PCI-2" en la listapara seleccionarlo y luego haga clic en Seleccionar.
4. Aparecerá un cuadro de diálogo que le indicará que el NextMove PCI-2 no dispone en laactualidad de ningún firmware.
Hacer clic en Sí para buscar el firmware.
5-8 Funcionamiento MN1933WES

5. En el diálogo de elección de firmware, hacer clic en el cuadro desplegable de tipos decontrolador y seleccionar el 'NextMove PCI-2'.
En la tabla, hacer clic sobre la estructura de firmware más reciente y luego hacer clicsobre Descargar a controlador.
El firmware se descargará al NextMove PCI-2. (Es posible que se visualice un cuadro dediálogo para indicarle que Mint WorkBench ha detectado el nuevo firmware. Haga clic enAceptar para continuar.)
Mint WorkBench lee datos recogidos del NextMove PCI-2. Una vez completado, puedevisualizarse el modo de ajuste fino. Con esto se completa la instalación del software.
MN1933WES Funcionamiento 5-9
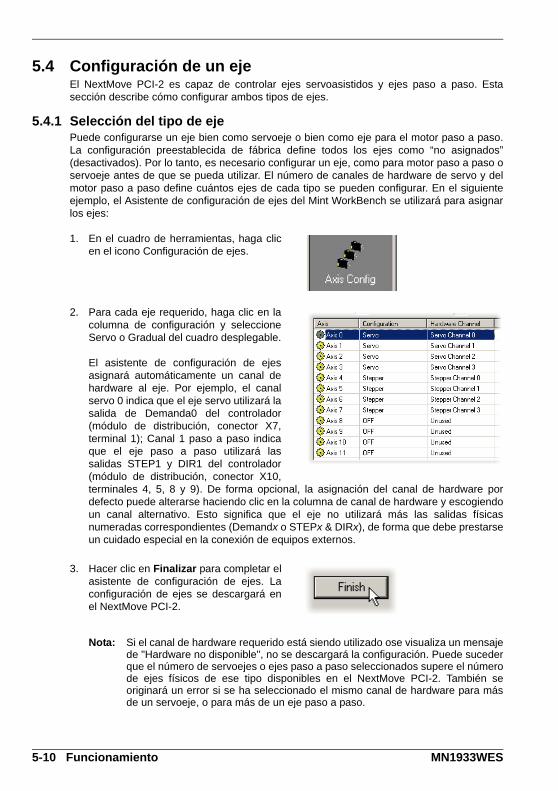
5.4 Configuración de un ejeEl NextMove PCI-2 es capaz de controlar ejes servoasistidos y ejes paso a paso. Estasección describe cómo configurar ambos tipos de ejes.
5.4.1 Selección del tipo de ejePuede configurarse un eje bien como servoeje o bien como eje para el motor paso a paso.La configuración preestablecida de fábrica define todos los ejes como “no asignados”(desactivados). Por lo tanto, es necesario configurar un eje, como para motor paso a paso oservoeje antes de que se pueda utilizar. El número de canales de hardware de servo y delmotor paso a paso define cuántos ejes de cada tipo se pueden configurar. En el siguienteejemplo, el Asistente de configuración de ejes del Mint WorkBench se utilizará para asignarlos ejes:
1. En el cuadro de herramientas, haga clicen el icono Configuración de ejes.
2. Para cada eje requerido, haga clic en lacolumna de configuración y seleccioneServo o Gradual del cuadro desplegable.
El asistente de configuración de ejesasignará automáticamente un canal dehardware al eje. Por ejemplo, el canalservo 0 indica que el eje servo utilizará lasalida de Demanda0 del controlador(módulo de distribución, conector X7,terminal 1); Canal 1 paso a paso indicaque el eje paso a paso utilizará lassalidas STEP1 y DIR1 del controlador(módulo de distribución, conector X10,terminales 4, 5, 8 y 9). De forma opcional, la asignación del canal de hardware pordefecto puede alterarse haciendo clic en la columna de canal de hardware y escogiendoun canal alternativo. Esto significa que el eje no utilizará más las salidas físicasnumeradas correspondientes (Demandx o STEPx & DIRx), de forma que debe prestarseun cuidado especial en la conexión de equipos externos.
3. Hacer clic en Finalizar para completar elasistente de configuración de ejes. Laconfiguración de ejes se descargará enel NextMove PCI-2.
Nota: Si el canal de hardware requerido está siendo utilizado ose visualiza un mensajede "Hardware no disponible", no se descargará la configuración. Puede sucederque el número de servoejes o ejes paso a paso seleccionados supere el númerode ejes físicos de ese tipo disponibles en el NextMove PCI-2. También seoriginará un error si se ha seleccionado el mismo canal de hardware para másde un servoeje, o para más de un eje paso a paso.
5-10 Funcionamiento MN1933WES

Se recomienda que los ejes sin utilizar permanezcan siempre en la posición dedesconectados (OFF), ya que ello provee más tiempo de procesamiento para los ejes queestán siendo utilizados. Establecer un eje virtual significa que puede utilizarse para simularmovimiento dentro del controlador, pero no utilizar salidas físicas (canal de hardware). Ver elfichero de ayuda de Mint en cuanto a los detalles de las palabras clave CONFIG yAXISCHANNEL.
5.4.2 Seleccionar una escalaMint define todas las palabras clave de movimiento relacionadas con la posición y lavelocidad en términos de conteos por cuadratura (para servomotores) o pasos para motorespaso a paso. El número de conteos por cuadratura (o pasos) está dividido porSCALEFACTOR, lo que permite utilizar unidades más adecuadas para su aplicación. Launidad definida por el ajuste de un valor se denomina unidad de usuario (uu).
Por ejemplo, un motor con un encoder de 1000 pulsos. Esto provee 4000 conteos porcuadratura por cada revolución. Si el SCALEFACTOR no está establecido, un comando deMint que involucra distancia, velocidad o aceleración, quizá deba utilizar un número mayorpara especificar un movimiento significativo. Por ejemplo, MOVER(0)=16000 (MovimientoRelativo) rotaría el motor en 16 000 conteos por cuadratura - solo cuatro revoluciones. Alestablecer un SCALEFACTOR de 4000, la unidad de usuario se convierte en revoluciones. Elcomando más comprensible MOVER(0)=4 se podría usar ahora para mover el motor cuatrorevoluciones (vueltas).
En aplicaciones con movimiento lineal, un valor adecuado para el SCALEFACTOR permitiríaque los comandos expresaran valores en distancia lineal, por ejemplo , pulgadas, pies omilímetros.
1. En el Cuadro de herramientas, haga clic en elicono Parámetros.
2. Haga clic en la pestaña Escala.
3. Haga clic en el cuadro desplegable de Ejes paraseleccionar el eje. Cada eje puede tener, si serequiere, una escala diferente.
4. Hacer clic en el cuadro de escalado y escribir unvalor.
MN1933WES Funcionamiento 5-11

5. Hacer clic en Aplicar.
Esto define inmediatamente el factor deescalamiento para el eje seleccionado, quepermanecerá en el NextMove PCI-2 hasta que sedefina otra escala o hasta que se desconecte laenergía del NextMove PCI-2.
5.4.3 Ajuste de la salida de habilitación del accionamientoUna salida de habilitación de accionamiento permite al NextMove PCI-2 habilitar elamplificador de accionamiento externo para producir el movimiento o para inhabilitarlo encaso de un error. Cada eje se puede configurar con su salida de habilitación deaccionamiento propia o puede compartir una salida con otros ejes. Si la salida se comparte,un error en cualquiera de los ejes que esté compartiendo la salida hará que se deshabilitentodos.
La salida de habilitación de accionamiento puede ser el relé o una salida digital.
1. En el Cuadro de herramientas, haga clic en elicono Entrada/Salida (I/O).
2. En la parte inferior de la pantalla de E/S digital,haga clic en la pestaña Salidas digitales.
La parte izquierda de la pantalla muestra unacolumna de iconos amarillos: Alto, Bajo,Elevando, Descendiendo y Elevar/Descender.Estos describen el comportamiento de lasalida cuando está activada (para habilitar eleje).
3. Si se va a utilizar el relé, ignorar este paso ypasar directamente al paso 4.
Si se va a utilizar una salida digital, arrastre elicono amarillo correspondiente hasta el iconogris de SALIDA (OUT) que se utilizará comosalida de habilitación del accionamiento. Sucolor cambiará a azul brillante.
5-12 Funcionamiento MN1933WES

4. Si utiliza el relé, arrastre el icono gris Relay0 hasta el icono gris de eje X en la partederecha de la pantalla. Para configurar múltiples ejes y usar el relé, repita este paso enlos otros ejes.
Si utiliza una salida digital, arrastre el icono azul brillante OUT hasta el icono gris de ejeX en la parte derecha de la pantalla. Para configurar múltiples ejes con la misma salidade habilitación de accionamiento, repita este paso en los otros ejes.
5. Haga clic en Aplicar en la parte inferior dela pantalla. Esto envía la configuración desalida al NextMove PCI-2.
5.4.4 Probar la salida de habilitación del accionamiento1. En la barra de herramientas principal de Mint
WorkBench, haga clic sobre el botón delEje 0-7. En el cuadro de diálogo Seleccionarejes predeterminados, seleccione los ejes quese controlarán. Haga clic en Aceptar (OK)para cerrar el diálogo.
2. En la barra de herramientas principal del MintWorkBench, haga clic en el botón Habilitaciónde accionamiento Haga clic en el botónnuevamente. Cada vez que haga clic en elbotón, se activarán las salidas de habilitaciónde accionamiento para los ejes seleccionados.
Cuando el botón se encuentra pulsado en laposición (hacia abajo), el amplificador deaccionamiento debe estar activado. Cuando elbotón se encuentra elevado en la posición (hacia arriba), el amplificador deaccionamiento debe estar desactivado.
Si no funciona, o la acción del botón es la inversa, compruebe las conexiones eléctricasentre el módulo de distribución y el amplificador de accionamiento.
Si está utilizando la salida de relé, compruebe que esté utilizando las conexionesnormalmente abierta o normalmente cerrada correctas.
Si está utilizando una salida digital, compruebe que esté utilizando el método deactivación por nivel alto, bajo o de flanco ascendente/descendente esperado por elamplificador de accionamiento.
MN1933WES Funcionamiento 5-13

5.5 Servoeje - prueba y ajusteEsta sección describe el método para probar y ajustar un servoeje. El amplificador deaccionamiento ya debe haber sido ajustado para la corriente o velocidad básica del controldel motor. Para probar los ejes de accionamiento paso a paso, vaya directamente a lasección 5.9.
5.5.1 Probar la salida de demandaEsta sección prueba el funcionamiento y la dirección de la salida de demanda para el eje 0.El ejemplo asume que el eje 0 ya se configuró como servoeje, utilizando el canal dehardware predeterminado 0 (ver la sección 5.4.1). Se recomienda desconectar el motor dela carga para esta prueba.
1. Compruebe que el botón de habilitación delaccionamiento se encuentre pulsado (haciaabajo).
2. En el Cuadro de herramientas, haga clic en elicono Editar y depurar.
3. Haga clic en la ventana Comando.
4. Tipo:PAR(0)=5donde 0 es el eje que se probará. En esteejemplo, esto debe provocar una demanda de+5% de salida máxima (0,5 V) en la salidaDemand0 (módulo de distribución, conectorX7, terminal 1).Ver la sección 4.3.2 para obtener más detallessobre las salidas de demanda. En Mint WorkBench, busque la ventana Espía, ubicadaen la parte derecha de la pantalla. La pantalla de comando de LED virtual deberámostrar 5 (aproximadamente). Si parece no haber salida de demanda, verificar lasconexiones eléctricas entre el módulo de distribución y el accionamiento.
5. Para repetir las pruebas para demandas negativas (inversas), escriba:PAR(0)=-5Esto hará que se produzca una demanda de salida máxima de -5% (-0,5 V) en la salidaDEMAND0.
6. Para eliminar la demanda y detener la prueba,escriba:STOP(0)
Esto debe provocar que la demandaproducida en la salida DEMAND0 se vuelva de0 V.
5-14 Funcionamiento MN1933WES
5.5.2 Una introducción al control de bucle cerradoEsta sección describe los principios básicos del control de bucle cerrado. Si ya estáfamiliarizado con el control de bucle cerrado, pase directamente a la sección 5.6.1.
Cuando haya un requerimiento para mover un eje, el software de control NextMove PCI-2traduce el mismo en un voltaje de salida de demanda. Esto se utiliza para controlar elamplificador de accionamiento que provee energía al motor. Se utiliza un encoder o unresolver en el motor para medir la posición del motor. Cada 1 ms* (ajustable utilizando lapalabra clave LOOPTIME), el NextMove PCI-2 compara las posiciones de demanda ymedida. Después, calcula la demanda necesaria para minimizar la diferencia entre ellas,conocida como error de seguimiento.
Este sistema de medición y corrección constantes se conoce como control de bucle cerrado. [ Como analogía, imagine que se encuentra en su coche esperando en una intersección. Vaa seguir en la misma dirección cuando el semáforo cambie, igual que el coche que estádelante suyo, llamado Demanda. No va a hacer una carrera con Demanda, su trabajo comocontrolador (NextMove PCI-2) es mantenerse al mismo nivel que Demanda, mirando por laventana para medir su posición].
El término principal que utiliza el NextMove PCI-2 para corregir el error se denominaGanancia proporcional (KPROP). Un controlador proporcional muy simple solomultiplicaría la cantidad de errores por la ganancia proporcional y aplicaría el resultado almotor [cuanto más se aleja Demanda, hacia adelante o hacia atrás, más presiona o suelta elacelerador].
Si la Ganancia proporcional se define como muy alta, se superará el nivel de la demanda,que hará que el motor vibre y se mueva alrededor de la posición deseada antes deasentarse [presiona el acelerador tan fuerte que pasa a Demanda. Para mantenerse a nivel,suelta el acelerador, pero termina quedándose un poco por detrás. Continúe repitiendo estoy tras un par de intentos termina al mismo nivel que Demanda, viajando a una velocidaduniforme. Esto era lo que quería hacer, pero le llevó bastante tiempo].Si la Ganancia proporcional se aumenta aún más, el sistema se vuelve inestable [continúapresionando y luego soltando el acelerador tan fuerte que nunca viaja a una velocidaduniforme].
Para reducir el comienzo de la inestabilidad, se utiliza un término denominado Ganancia derealimentación de velocidad (KVEL). Esto resiste al movimiento rápido del motor y permiteque la Ganancia proporcional se defina más alta antes de que comience la vibración. Otrotérmino llamado Ganancia derivativa (KDERIV) también se puede usar para dar un efectosimilar.
Con la Ganancia proporcional y la Ganancia realimentación de velocidad (o Gananciaderivativa) es posible que un motor se detenga con un pequeño error de seguimiento[Demanda se detuvo, por eso usted también se detuvo, pero no al mismo nivel]. El NextMove PCI-2 intenta corregir el error, pero como el error es muy pequeño la torsiónnecesaria quizá no sea suficiente para superar la fricción.
* El intervalo de muestreo de 1ms puede modificarse utilizando la palabra clave LOOPTIME a500µs o a 200µs.
Este problema se resuelve utilizando un término llamado Ganancia integral (KINT). Estosuma el error con el paso del tiempo, de manera que la torsión del motor se aumentegradualmente hasta que el error posicional se reduce a cero [como si una persona empujaragradualmente cada vez más fuerte su coche hasta ponerlo al mismo nivel que Demanda].
MN1933WES Funcionamiento 5-15

Sin embargo, si existe una carga grande en el motor (si sostiene una carga pesadasuspendida, por ejemplo), es posible que la salida aumente su demanda en un 100%. Esteefecto se puede limitar utilizando la palabra clave KINTLIMIT, que limita el efecto de KINT aun determinado porcentaje de la salida de demanda. Otra palabra clave denominadaKINTMODE puede incluso desactivar la acción integral cuando no es necesaria.
Los términos de ganancia restantes son el Avance de velocidad (KVELFF) y el Avance dela aceleración (KACCEL), que se describen a continuación.
Para resumir, se pueden utilizar las siguientes reglas como guía.
KPROP: Aumentar el KPROP acelerará la respuesta y reducirá el efecto deperturbaciones y variaciones en la carga. El efecto secundario de aumentar el KPROPes que también se aumenta la sobretensión y si se define muy alto, hará que el sistemase vuelva inestable. El objetivo es definir la Ganancia proporcional lo más alta posiblesin provocar una sobretensión, inestabilidad u oscilaciones pendulares en el borde deun encoder cuando se encuentra en posición estacionaria (el motor zumbará).
KVEL: Esta ganancia tiene un efecto de atenuación, y puede aumentarse para reducircualquier superación de la demanda. Si el KVEL se vuelve muy grande amplificarácualquier ruido en la medición de velocidad y provocará oscilaciones.
KINT: Esta ganancia tiene un efecto desestabilizador, pero una pequeña cantidad sepuede utilizar para reducir errores de estado de equilibrio. Por defecto, KINTMODE sefija de forma que el término KINT sea ignorado, o que solo se aplique durante losperíodos de velocidad constante.
KINTLIMIT: El límite de integración determina el valor máximo del efecto de acciónintegral. Esto se especifica como porcentaje de la demanda de escala completa.
KDERIV: Esta ganancia tiene un efecto de amortiguación. La acción derivativa posee elmismo efecto que la realimentación de velocidad si los términos de realimentacioón y deprealimentación de velocidad son iguales.
KVELFF: Este es un término de avance y como tal tiene un efecto en el servosistemadiferente al de las ganancias anteriores. KVELFF se encuentra fuera del bucle cerrado ypor lo tanto no tiene un efecto sobre la estabilidad del sistema. Esta ganancia permiteuna respuesta más rápida para exigir cambios de velocidad con errores menores deseguimiento; por ejemplo, aumentaría el KVELFF para reducir el siguiente error deseguimiento durante la sección de giro horizontal de un movimiento trapezoidal. Elmovimiento de prueba trapezoidal se puede utilizar para ajustar más finamente estaganancia. Este término es especialmente útil con servos controlados por velocidad
KACCEL: Este término está diseñado para reducir sobretensiones de velocidad enmovimientos de aceleración alta. Debido a la cuantificación de los datos posicionales yde la velocidad del bucle servo, para que el término de avance (prealimentación) deaceleración afecte al bucle servo, la aceleración del eje debe superar 1 000 000 deconteos de encoder por segundo.
5-16 Funcionamiento MN1933WES

Figura 19: Servobucle de NextMove PCI-2
+
-
-
+
++ +
+
++
Dem
anda
Ace
lera
ción Vel
oci
dad
de
d
em
anda
Po
sici
ón
de
dem
and
a
Ve
loci
dad
m
ed
ida
Pos
ició
n m
edi
da
Gen
era
do
r de
p
erf
iles
KA
CC
EL
Ace
lera
ción
adel
ante
(p
real
imen
taci
ón)
KV
ELF
FV
eloc
idad
adel
ant
e (p
real
ime
ntac
ión
)
KP
RC
PG
ana
nci
ap
ropo
rcio
nal
KIN
TG
ana
ncia
In
tegr
al
KD
ER
VG
an
anci
ade
rivat
iva
DA
CLI
MIT
MA
XS
alid
a C
lip D
AC
KV
EL
Ve
loci
dad
Re
alim
ent
aci
ón
Am
plif
ica
dor
de p
ote
nci
a
Se
rvo
mo
tor
MN1933WES Funcionamiento 5-17

5.6 Servoeje - ajuste para el control de corriente
5.6.1 Selección de las ganancias del servobucleTodos los parámetros del servobucle tienen como predeterminado el valor cero, lo quesignifica que la salida de demanda será cero al encender el equipo. La mayoría de losamplificadores de accionamiento se pueden establecer en el modo de control de corriente(torsión) o en el modo de control de velocidad. Verifique que el amplificador deaccionamiento funcione en el modo correcto. El procedimiento para configurar las gananciasdel sistema difiere ligeramente para cada una. Para ajustar el control de velocidad de un eje,vaya directamente a la sección 5.8. Se recomienda que el sistema se pruebe y ajusteinicialmente con el eje del motor desconectado del resto de la maquinaria. Confirme que lasseñales de realimentación del encoder del amplificador de motor o accionamiento hayansido conectadas y que una demanda positiva genere una señal de realimentación positiva.
Nota: El método explicado en esta sección debería permitirle obtener un buen controldel motor, pero no le proveerá necesariamente la respuesta óptima sin un ajustefino posterior. Es necesario comprender bien el efecto de los términos deganancia.
1. En el Cuadro de herramientas, haga clic enel icono de ajuste fino.
La ventana de Ajuste fino se muestra en laderecha de la pantalla. El área principal dela ventana del Mint WorkBench muestra laventana de Captura. Cuando se hayanrealizado las pruebas de ajuste, semostrará un gráfico que representa larespuesta.
2. Haga clic en el cuadro KDERIV de laventana de ajuste fino e introduzca unvalor inicial de 1.
Haga clic en Aplicar y a continuación gireel eje del motor a mano. Repita esteproceso, aumentando lentamente el valorde KDERIV hasta que comience a sentiralgo de resistencia en el eje del motor. Elvalor exacto de KDERIV no es crítico enesta etapa.
5-18 Funcionamiento MN1933WES

3. Haga clic en el cuadro KPROP e intro-duzca un valor que sea aproximadamenteun cuarto del valor de KDERIV. Si el motorcomienza a vibrar, disminuya el valor deKPROP o aumente el valor de KDERIVhasta que la vibración se detenga. Lo únicoque se puede necesitar son algunospequeños cambios.
4. En el cuadro desplegable Tipo demovimiento, compruebe que el tipo demovimiento esté definido como Paso.
5. Haga clic en el cuadro Distancia eintroduzca una distancia para elmovimiento de paso. Se recomienda definirun valor que haga girar el motor unapequeña distancia, por ejemplo unarevolución.
Nota: La distancia depende de la escala ajustada en la sección 5.4.2. Si se fija una escala de forma que las unidades puedan ser expresadas enrevoluciones (o en otra unidad de su elección), esas son entonces las unidadesque se emplearán aquí. Si no estableció una escala, la cantidad que introduciráserá en conteos de encoder.
6. Haga clic en el cuadro Duración eintroduzca una duración para elmovimiento, en segundos. Debe ser unaduración corta, por ejemplo 0,15 segundos.
7. Haga clic en Ir.
El NextMove PCI-2 realizará el movimiento y el motor girará. Tan pronto como elmovimiento se haya completado, Mint WorkBench descargará los datos capturados delNextMove PCI-2. Los datos serán entonces visualizados en la ventana de captura enforma de gráfico.
Nota: Los gráficos que ve no serán exactamente iguales a los que se muestran aquí.Recuerde que cada motor tiene una respuesta diferente.
MN1933WES Funcionamiento 5-19

8. Utilice los cuadros de verificación debajodel gráfico, seleccione los trazos querequiera, por ejemplo de Posición medida yPosición de demanda.
5.6.2 Respuesta subamortiguadaSi el gráfico muestra que la respuesta está subamortiguada (se supera la demanda, comose muestra en la Figura 20), entonces el valor de KDERIV debe aumentarse para añadirmayor amortiguación al movimiento. Si la superación de la demanda es excesiva o seprodujo una oscilación, puede ser necesario reducir el valor de KPROP.
Figura 20: Respuesta subamortiguada
9. Haga clic en los cuadros KDERVI y/oKPROP y realice los cambios necesarios.La respuesta ideal se muestra en lasección 5.6.4.
ON - Eje 0: Posición medida (uu)
ON - Eje 0: Posición de demanda (uu)
Posición medida
Posición de demanda
Tiempo (ms)
5-20 Funcionamiento MN1933WES

5.6.3 Respuesta sobreamortiguadaSi el gráfico muestra que la respuesta está sobreamortiguada (llega a la demanda muylentamente, como se muestra en la Figura 21), entonces el valor de KDERIV debedisminuirse para reducir la amortiguación del movimiento. Si la sobreamortiguación esexcesiva, puede que sea necesario aumentar el valor de KPROP.
Figura 21: Respuesta sobreamortiguada
10. Haga clic en los cuadros KDERVI y/oKPROP y realice los cambios necesarios.La respuesta ideal se muestra en lasección 5.6.4.
Tiempo (ms)
Posición medida
Posición de demanda
MN1933WES Funcionamiento 5-21

5.6.4 RespuestaCríticamente amortiguadaSi el gráfico muestra que la respuesta alcanza la demanda rápidamente y solo supera lademanda en una pequeña medida, esto se puede considerar una respuesta ideal para lamayoría de los sistemas.Ver Figura 22.
Figura 22: Respuesta (ideal) amortiguada críticamente
Tiempo (ms)
Posición medida
Posición de demanda
5-22 Funcionamiento MN1933WES

5.7 Servoeje - eliminar errores de estado estableEn los sistemas donde se necesita un posicionamiento preciso y exacto, generalmente sedebe posicionar dentro de un conteo de encoder. La ganancia proporcional, KPROP, nopuede lograr esto normalmente debido a que un pequeño error de seguimiento soloproducirá una demanda pequeña para el amplificador de accionamiento y no es suficientepara superar la fricción mecánica (esto se da mayormente en sistemas controlados decorriente). Este error se puede corregir aplicando una ganancia integral. La gananciaintegral, KINT, funciona acumulando errores consiguientes con el tiempo para producir unademanda suficiente para mover el motor a la posición requerida sin errores de seguimiento.Por lo tanto, KINT puede corregir errores causados por efectos gravitacionales como lastablas lineales con movimiento vertical. Con los amplificadores de accionamientocontrolados de corriente se necesita una demanda de salida mayor a cero para conservar lacarga en la posición correcta y obtener un error de seguimiento cero.
Se debe tener cuidado al configurar KINT ya que un valor alto provocará inestabilidaddurante los movimientos. Un valor típico para KINT es 0,1. El efecto de KINT también debeestar limitado por la configuración del límite de integración, KINTLIMIT, por el valor máspequeño posible suficiente para superar la fricción o las cargas estáticas, como 5. Estolimitará la contribución del término integral al 5% del rango de salida completo del DAC.
1. Haga clic en el cuadro KINT e introduzcaun valor inicial pequeño, por ejemplo 0,1.
2. Haga clic en el cuadro KINTLIMIT eintroduzca un valor inicial de 5.
Con el NextMove PCI-2, la acción de KINT y KINTLIMIT se puede ajustar para que funcioneen diversos modos:
Nunca: el término KINT no se aplica nunca
Siempre: el término KINT se aplica siempre
Inteligente: el término KINT solo se aplica cuando la velocidad de demanda es cero oconstante.
Estado estable: el término KINT solo se aplica cuando la velocidad de demanda es cero.
Esta función se puede seleccionar utilizando el cuadro desplegable KINTMODE.
MN1933WES Funcionamiento 5-23

5.8 Servoeje - ajuste para el control de velocidadLos amplificadores de accionamiento diseñados para el control de velocidad incorporan supropio término de realimentación de velocidad para proveer amortiguación al sistema. Poresta razón, KDERIV (y KVEL) a veces se definen en cero.
Es importante ajustar correctamente la ganancia de avance de alimentación de la velocidadKVELFF para obtener la respuesta óptima del sistema. El término de avance dealimentación de velocidad toma la demanda de velocidad instantánea del generador deperfiles y la añade al bloque de salida (ver la Figura 19). KVELFF se encuentra fuera delbucle cerrado y por lo tanto no tiene un efecto sobre la estabilidad del sistema. Esto significaque el término se puede aumentar al máximo sin provocar que el motor oscile, siempre ycuando los otros términos hayan sido configurados correctamente.
Si está configurado correctamente, KVELFF hará que el motor se mueva a la velocidad querequiere el generador de perfiles. Esto tiene lugar sin que los otros términos en el buclecerrado hagan nada, excepto compensar los pequeños errores en la posición del motor.Esto genera una respuesta más rápida a los cambios en la velocidad de demanda, conmenos errores de seguimiento.
Antes de proceder, confirme que las señales de realimentación del encoder del amplificadorde motor o accionamiento hayan sido conectadas y que una demanda positiva genere unaseñal de realimentación positiva.
5.8.1 Cálculo de KVELFFPara calcular el valor correcto de KVELFF, deberá saber:
La velocidad, en revoluciones por minuto, producida por el motor cuando se aplica unademanda máxima (+10 V) al amplificador de accionamiento.
El ajuste para LOOPTIME. El ajuste preestablecido en fábrica es de 1 ms.
La resolución de la entrada del encoder.
La fórmula del servobucle utiliza valores de velocidad expresados en conteos por cuadraturapor servobucle. Para calcular esta cifra:
1. Primero, divida la velocidad del motor, en revoluciones por minuto, por 60 para obtenerel número de revoluciones por segundo. Por ejemplo, si la velocidad del motor es3000 rpm cuando se aplica la demanda máxima (+10 V) al amplificador deaccionamiento:
Revoluciones por segundo = 3000 / 60
= 502. Después, calcule cuántas revoluciones se producirán durante un servobucle. El tiempo
de servobucle predeterminado de fábrica es de 1 ms (0,001 segundos), por lo tanto:
Revoluciones por servobucle = 50 x 0,001 segundos
= 0.053. Ahora, calcule cuantos conteos por cuadratura del encoder hay por revolución. El
NextMove PCI-2 cuenta los flancos de ambos trenes de impulso (CHA y CHB)provenientes del encoder; por lo tanto, por cada pulso de encoder existen 4 "conteos porcuadratura". Con un encoder de 1000 pulsos:
Conteos de cuadratura por revolución = 1000 x 4
= 4000
5-24 Funcionamiento MN1933WES

4. Finalmente, calcule cuantos conteos por cuadratura existen por servobucle:
Conteos de cuadratura por servobucle = 4000 x 0,05
= 200La salida de demanda analógica está controlada por un DAC de 12 bits, que puede crearvoltajes de salida dentro de un rango de -10 V a +10 V. Esto significa que una salida máximade +10 V corresponde a un valor DAC de 2048. El valor KVELFF se calcula dividiendo 2048por el número de conteos por cuadratura por servobucle; por lo tanto:
KVELFF = 2048 / 200= 10.24
5. Haga clic en el cuadro KVELFF eintroduzca el valor.
El valor calculado debe dar cero errores deseguimiento a una velocidad constante. Siutiliza valores mayores al valor calculadoprovocará que el controlador tenga unerror de seguimiento después de laposición deseada. Si utiliza valoresmayores al valor calculado hará que elcontrolador tenga un error de seguimientotras la posición deseada.
6. En el cuadro desplegable Tipo demovimiento, compruebe que el tipo demovimiento esté definido comoTrapezoide.
7. Haga clic en el cuadro Distancia eintroduzca una distancia para el movimiento de paso. Se recomienda definir un valorque haga que el motor dé algunas revoluciones, por ejemplo 10.
Nota: La distancia depende de la escala ajustada en la sección 5.4.2. Si se fija unaescala de forma que las unidades puedan ser expresadas en revoluciones (o enotra unidad de su elección), esas son entonces las unidades que se emplearánaquí. Si no estableció una escala, la cantidad que introducirá será en conteos deencoder.
8. Haga clic en Ir.
MN1933WES Funcionamiento 5-25

El NextMove PCI-2 realizará el movimiento y el motor girará. Tan pronto como el movimientose haya completado, Mint WorkBench cargará los datos capturados del NextMove PCI-2.Los datos serán entonces visualizados en la ventana de captura en forma de gráfico.
Nota: El gráfico que ve no será exactamente igual al que se muestra aquí. Recuerdeque cada motor tiene una respuesta diferente.
9. Utilice los cuadros de verificacióndebajo del gráfico, seleccione lostrazos de Velocidad medida yVelocidad de demanda.
Figura 23: Valor correcto de KVELFF
Puede ser necesario hacer cambios en el valor calculado de KVELFF. Si el trazo deVelocidad medida aparece sobre el trazo de Velocidad de demanda, reduzca el valor deKVELFF. Si el trazo de Velocidad medida aparece por debajo del trazo de Velocidad dedemanda, aumente el valor de KVELFF. Repita la prueba después de cada cambio. Cuandolos dos trazos aparecen uno encima del otro (aproximadamente), el valor correcto paraKVELFF se ha encontrado, tal como se muestra en la Figura 19.
ON - Eje 0: Velocidad medida (uu/s)
ON - Eje 0: Velocidad de demanda (uu/s)
Tiempo (ms)
Velocidad medida
Velocidad de demanda
5-26 Funcionamiento MN1933WES

5.8.2 Ajuste de KPROPEl término KPROP se puede utilizar para reducir errores de seguimiento. Su valor serágeneralmente mucho menor que el valor utilizado por un sistema controlado de corrienteequivalente. Un valor fraccionario, por ejemplo 0,1, proporcionará probablemente la mejorrespuesta.
1. Haga clic en el cuadro KPROP e introduzca un valor inicial de 0,1.
2. Haga clic en Ir.
El NextMove PCI-2 realizará el movimiento y el motor girará. Tan pronto como el movimientose haya completado, Mint WorkBench cargará los datos capturados del NextMove PCI-2.Los datos serán entonces visualizados en la ventana de captura en forma de gráfico.
Nota: El gráfico que ve no será exactamente igual al que se muestra aquí. Recuerdeque cada motor tiene una respuesta diferente.
3. Utilice los cuadros de verificación debajodel gráfico, seleccione los trazos dePosición medida y Posición dedemanda.
ON - Eje 0: Posición medida (uu)ON - Eje 0: Posición de demanda (uu)
MN1933WES Funcionamiento 5-27

Figura 24: Valor correcto de KPROP
Las dos trazas aparecerán probablemente con un pequeño desplazamiento entre ellas.Ajuste el KPROP en pequeñas medidas hasta que los dos trazos se ubiquen uno encima delotro (aproximadamente), tal como se muestra en la Figura 24.
Tiempo (ms)
Posición medida
Posición de demanda
5-28 Funcionamiento MN1933WES

5.9 Prueba del eje de motor paso a pasoEsta sección describe el método para probar un eje de motor paso a paso. El control demotor paso a paso es un sistema de bucle abierto, de manera que no es necesario unajuste.
5.9.1 Prueba de la salidaEsta sección prueba el funcionamiento y la dirección de la salida. Se recomienda que elsistema se pruebe inicialmente con el eje del motor desconectado del resto de lamaquinaria.
1. Compruebe que el botón de habilitación delaccionamiento se encuentre pulsado.
2. En el Cuadro de herramientas, haga clic en elicono Editar y depurar.
3. Haga clic en la ventana Comando.
4. Tipo:JOG(0)=2
donde 0 es el eje que se probará (salida pasoa paso) y 2 es la velocidad.
Nota: El comando JOG especifica la velocidad en unidades de usuario por segundo.Por lo tanto, la velocidad se ve afectada por el SCALEFACTOR (sección 5.4.2).
Si parece no haber salida de demanda o de impulso, verificar las conexiones eléctricasentre el módulo de distribución y el accionamiento.
5. Para repetir las pruebas para movimientosinversos, escriba:JOG(0)=-2
6. Para eliminar la demanda y detener la prueba,escriba:STOP(0)
MN1933WES Funcionamiento 5-29

5.10 Configuración de la entrada/salida digitalLa ventana de Entrada/Salida digital puede ser utilizada para ajustar otras entradas y salidasdigitales.
5.10.1Configuración de la entrada digitalLa pestaña de entradas digitales le permite definir cómo se disparará cada entrada digital y,opcionalmente, si va a ser asignada a una función especial, por ejemplo el límite de avance.En el siguiente ejemplo, la entrada digital 1 se ajustará para el disparo con un flancodescendente, situándose en la entrada límite de avance del eje 0:
1. En el Cuadro de herramientas, haga clic enel icono Entrada/Salida (I/O).
2. En la parte inferior de la pantalla deEntrada/Salida digital, haga clic en lapestaña Entradas digitales.
La parte izquierda de la pantalla muestrauna columna de iconos amarillos: Alto,Bajo, Ascendente, Descendente, yAscender/Descender. Estos describen lamanera en la que se activará la entrada.
5-30 Funcionamiento MN1933WES

3. Arrastrar el icono Descendente sobre el icono IN1 . Esto configurará IN1 para que
responda a un flanco descendente.
4. Ahora arrastre el icono IN1 sobre el icono Límite de Avance .
Esto configurará IN1 como la entrada de Límite de avance para el eje 0.
MN1933WES Funcionamiento 5-31

5. Haga clic en Aplicar para enviar los cambios alNextMove PCI-2.
Nota: Si es necesario, puede configurar las entradas múltiples antes de hacer clic enAplicar.
5.10.2Configuración de salida digitalLa pestaña de Salidas digitales le permite definir cómo funcionará cada salida digital y si sedeben asignar como salidas de habilitación de accionamiento (ver la sección 5.4.3). Hagaclic en Aplicar para enviar los cambios al NextMove PCI-2.
5-32 Funcionamiento MN1933WES

5.11 Grabar información de configuraciónCuando se desconecta la alimentación del NextMove PCI-2, todos los datos, incluyendo losparámetros de configuración y ajuste, se pierden. Deberá por tanto guardar esta informaciónen un archivo, que podrá ser cargado cuando se use la tarjeta la próxima vez. Comoalternativa, la información puede ser incluida en archivos de programa como parte delbloque de inicio.
1. En el Cuadro de herramientas, haga clic enel icono Editar y depurar.
2. En el menú principal, elegir Archivo,Nuevo Archivo.
Aparecerá una nueva ventana de ediciónde programas.
3. En el menú principal, elegirPrograma, Generar bloque deinicio Mint.
Mint WorkBench leerá toda lainformación de configuración delNextMove PCI-2 y la colocará en elbloque de inicio. Para los detallesrelativos al bloque de inicio, ver elarchivo de ayuda de Mint.
MN1933WES Funcionamiento 5-33

4. En el menú principal, elija Archivo, Guardar Archivo. Escoja una carpeta, introduzcaun nombre de archivo y haga clic en Guardar.
5.11.1Cargar la información guardada1. En el Cuadro de herramientas, haga clic en el icono
Editar y depurar.
2. En el menú principal, elija Archivo, Abrir Archivo... .Localice el archivo y haga clic en Abrir.
Deberá incluirse un bloque de inicio en cada programa Mint, de forma que siempre queun programa se cargue y se ejecute, el NextMove PCI-2 quede configuradocorrectamente. Recuerde que cada combinación de accionamiento/motor tiene unarespuesta diferente. Si se utiliza el mismo programa en una instalación NextMove PCI-2diferente, necesitará modificarse el bloque de inicio.
5-34 Funcionamiento MN1933WES

Resolución de problemas6 Resolución de problemas
6.1 IntroducciónEsta sección describe los problemas comunes y sus soluciones. Si desea saber el significado de los indicadores LED, vea la sección 6.2.
6.1.1 Diagnóstico de problemasSi ha seguido usted por orden todas las instrucciones de este manual no deberá tenergrandes problemas para la instalación del NextMove PCI-2. Si tiene problemas, lea enprimer lugar esta sección. En Mint WorkBench, utilice la herramienta de Registro de errorespara los errores recientes y luego compruebe el archivo de ayuda. Si no puede resolver elproblema o el problema continúa, puede utilizar la función SupportMe.
6.1.2 Función SupportMeLa característica SupportMe (en el menú de ayuda) puede ser utilizada para enviarinformación vía correo electrónico al representante a quien usted adquirió el equipo. Si serequiere, podrá elegir añadir como anexos sus propios archivos de programa. MintWorkBench arrancará automáticamente su programa de correo e iniciará un nuevo mensaje,con la información completa del sistema y con los anexos seleccionados ya dispuestos. Sepuede añadir cualquier mensaje adicional propio y enviar a continuación el correoelectrónico. Si prefiere contactarse con el servicio técnico por teléfono o fax, los detalles decontacto se facilitan en la portada de este manual. Tenga la siguiente informaciónpreparada:
El número de serie de su NextMove PCI-2 (si lo sabe).
Utilice el elemento de menú Ayuda, SupportMe en Mint WorkBench para ver los detallessobre su sistema.
El tipo de amplificador de accionamiento y el motor que está usando.
Realizar una descripción clara de lo que intenta hacer, por ejemplo, realizar un ajustefino.
Proporcionar una descripción clara de los síntomas que observe, por ejemplo losmensajes de error visualizados en Mint WorkBench, o el valor en curso de cualquiera delas palabras clave de error de Mint: AXISERROR, AXISSTATUS, INITERROR, yMISCERROR.
El tipo de movimiento generado en el eje del motor.
Proporcione una lista de cualquier parámetro que haya configurado, por ejemplo laconfiguración de ganancia que introdujo.
6
MN1933WES Resolución de problemas 6-1

6.2 Indicadores NextMove PCI-2
6.2.1 LEDs de estadoLa toma posterior del NextMove PCI-2 contiene dos LEDs, S1 yS2, que presentan la información de estado general. Los LEDpueden iluminarse en rojo o en verde, así como de forma continuao parpadeando.
6.2.2 LEDs de CANEl borde superior del NextMove PCI-2 contiene cuatro LEDs demontaje en superficie (SMD), CH1, CH2, Tx y Rx, que indican elestado del CAN. Los LEDs pueden iluminarse de formapermanente o parpadeando.
LED de estado(s) Significado
Ambos desconectados NextMove PCI-2 no alimentado.
Ambos en rojo Reinicialización hardware (ver la sección 4.7).
Ambos color verde, en ciclos
Reinicialización de software, sin errores (ver la sección 4.7).
Ambos en rojo, en ciclosReinicialización de software, se ha producido un error en la prueba de autoencendido (Power On Self Test, POST).
S1 verde, parpadeando El firmware funciona correctamente.
S1 verde, parpadeando rápidamente
Descarga de FPGA en curso.
S1 rojo, parpadeandoEl firmware funciona, pero se ha producido un error de inicialización.
S2 rojo, parpadeando rápidamente
Error asíncrono - por ejemplo, se ha activado un interruptor limitador.
S2 verde, parpadeando rápidamente
Errores varios - por ejemplo, el accionamiento de salida no funciona.
Ambos color verde, parpadeando
Actualización del firmware en progreso.
Ambos color rojo, se apagan por separado
POST en funcionamiento (después de reinicialización).
LED de estado(s) Significado
CH1 El firmware descargado soporta el canal CANopen.
CH2 El firmware descargado soporta el canal CAN de Baldor.
Tx Se están transmitiendo datos a través del canal CAN.
Rx Se están recibiendo datos a través del canal CAN.
S1 S2
6-2 Resolución de problemas MN1933WES

6.2.3 LED de reinicioCerca de los cuatro LED CAN, el NextMove PCI-2 contiene otroLED, D16, que indica que el FPGA se inicializa en la puesta enmarcha. Este LED permanecerá iluminado hasta que un archivodel sistema (que incluye firmware FPGA) se descargue desde MintWorkBench.
MN1933WES Resolución de problemas 6-3

6.3 Resolución de problemasLas siguientes secciones describen algunos problemas comunes y sus soluciones.
6.3.1 ComunicaciónSi el problema no se describe a continuación, contacte con el servicio técnico. Para granparte de las pruebas que se describen a continuación será útil la utilización de unosciloscopio.
6.3.2 Control del motor
Síntoma Verificar
No se puede detectarNextMove PCI-2
Verificar que se ha instalado el controlador del NextMove PCI-2. Ver sección 5.1.
No se puede comunicar con el controlador.
Verifique que el Mint WorkBench esté cargado y que el NextMove PCI-2 sea el controlador seleccionado actualmente. El sistema operativo de Mint (firmware) debe descargarse al controlador cada vez que se conecta este.
Verificar que la tarjeta está firmemente asentada en su base en el ordenador y que esta base corresponde a la clase correcta.
Verificar que el LED verde S1 de la toma posterior de la tarjeta está parpadeando (aproximadamente dos veces por segundo).
Síntoma Verificar
El controlador parece estar funcionando pero no hará que el motor gire.
Compruebe que las conexiones entre el motor y el accionador sean correctas. Utilice el Mint WorkBench para realizar las pruebas de sistema básicas (ver la sección 5.5 o 5.9).
Asegúrese de que mientras el controlador no está en error, el accionamiento está habilitado y funciona. La primera vez que encienda el controlador, el accionamiento debe estar inhabilitado si no hay ningún programa en ejecución (generalmente en la parte frontal del accionamiento hay un LED que indica el estado).
Compruebe que las ganancias del servobucle estén configuradas correctamente; compruebe la ventana de Ajuste fino. Ver secciones 5.5.2 a 5.7.
6-4 Resolución de problemas MN1933WES

El motor funciona de manera incontrolable cuando el controlador está encendido.
Verificar que los encoders están conectados, que se encuentran alimentados a través de Encoder V+ (si se requiere, ver la sección 4.5.2) y que funcionan correctamente. Utilizar un osciloscopio de doble traza para visualizar simultáneamente ambos canales del encoder y/o las señales complementarias.
Compruebe que el accionamiento esté conectado correctamente al módulo de distribución y que cuando la demanda sea cero haya 0 V en la entrada de demanda del accionamiento. Ver sección 5.5.1.
Verifique que el módulo de distribución y el accionamiento están correctamente puestos a tierra en un lugar común.
El motor funciona de manera incontrolable cuando el controlador está encendido y se aplican las ganancias del servobucle o cuando un movimiento se encuentra en progreso. El motor se detiene después de poco tiempo.
Verificar que el encoder correspondiente al eje y que las señales de demanda se encuentran conectadas a los mismos ejes de movimiento. Verifique que la demanda hacia el accionamiento esté conectada a la polaridad correcta.
Compruebe que se obtenga un aumento positivo en la posición de eje cuando exista una señal de demanda positiva. La palabra clave de Mint ENCODERMODE se puede utilizar para cambiar la dirección de la entrada del encoder. La palabra clave de Mint DACMODEse puede utilizar para revertir la polaridad de salida del DAC.
Compruebe que el error de seguimiento máximo esté definido en un valor razonable. Por motivos de configuración, la detección de errores de seguimiento se puede inhabilitar con el valor FOLERRORMODE = 0.
El motor se encuentra bajo control, pero vibra o se sobretensiona durante un movimiento.
Es posible que las ganancias del servobucle se hayan fijado incorrectamente. Ver secciones 5.5.2 a 5.7.
Síntoma Verificar
MN1933WES Resolución de problemas 6-5

El motor se encuentra bajo control, pero cuando se mueve a una posición y luego vuelve al inicio, no regresa a la misma posición.
Empleando un osciloscopio en los conectores del módulo de distribución, verificar:
que todos los canales del encoder tengan señales nítidasy libres de ruido eléctrico;
que están correctamente cableados con el controlador;
que cuando el motor gire, las dos señales de ondacuadrada se encuentran defasadas 90 grados. También,verifique las señales complementarias.
Asegúrese de que el terminal del encoder utiliza cable de par trenzado apantallado y que el blindado está unido a la conexión blindada solo en el extremo del módulo de distribución.
Verifique que el módulo de distribución y el accionamiento están correctamente puestos a tierra en un lugar común.
Síntoma Verificar
6-6 Resolución de problemas MN1933WES
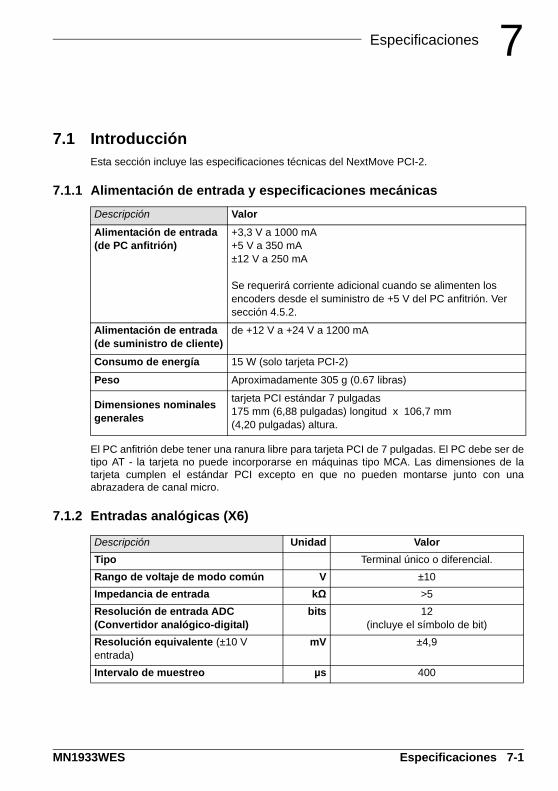
Especificaciones7 Especificaciones
7.1 IntroducciónEsta sección incluye las especificaciones técnicas del NextMove PCI-2.
7.1.1 Alimentación de entrada y especificaciones mecánicas
El PC anfitrión debe tener una ranura libre para tarjeta PCI de 7 pulgadas. El PC debe ser detipo AT - la tarjeta no puede incorporarse en máquinas tipo MCA. Las dimensiones de latarjeta cumplen el estándar PCI excepto en que no pueden montarse junto con unaabrazadera de canal micro.
7.1.2 Entradas analógicas (X6)
Descripción Valor
Alimentación de entrada(de PC anfitrión)
+3,3 V a 1000 mA+5 V a 350 mA±12 V a 250 mA
Se requerirá corriente adicional cuando se alimenten los encoders desde el suministro de +5 V del PC anfitrión. Ver sección 4.5.2.
Alimentación de entrada(de suministro de cliente)
de +12 V a +24 V a 1200 mA
Consumo de energía 15 W (solo tarjeta PCI-2)
Peso Aproximadamente 305 g (0.67 libras)
Dimensiones nominalesgenerales
tarjeta PCI estándar 7 pulgadas175 mm (6,88 pulgadas) longitud x 106,7 mm (4,20 pulgadas) altura.
Descripción Unidad Valor
Tipo Terminal único o diferencial.
Rango de voltaje de modo común V ±10
Impedancia de entrada kΩ >5
Resolución de entrada ADC (Convertidor analógico-digital)
bits 12(incluye el símbolo de bit)
Resolución equivalente (±10 V entrada)
mV ±4,9
Intervalo de muestreo µs 400
7
MN1933WES Especificaciones 7-1

7.1.3 Salidas analógicas (X7)
7.1.4 Entradas digitales (X1 & X2)
Descripción Unidad Valor
Tipo Bipolar
Rango de voltaje de salida V ±10
Corriente de salida (máxima) mA 1
Resolución de salida DACbits 12, 14 o 16
(incluye el símbolo de bit)
Resolución equivalente±4,9 mV (12-bits)±1,2 mV (14-bits)±305 µV (16-bits)
Intervalo de actualizaciónµs 200 - 2000
(igual que LOOPTIME; por defecto = 1000)
Descripción Unidad Valor
Tipo Optoaislada
Tensión de entrada (máxima) V +30
Tensión de entrada (Activa nivel alto)NominalMínimo
V+24+12
Tensión de entrada (Activa nivel bajo)NominalMáximo
V0
+2
Corriente de entrada (aproximada, por entrada)
mA 8
Intervalo de muestreo ms 1
7-2 Especificaciones MN1933WES

7.1.5 Entradas digitales (X3)
7.1.6 Salidas digitales (X4)
7.1.7 Salida de relé (X8)
Descripción Unidad Valor
Tipo No aislada
Tensión de entrada (máxima) V +30
Tensión de entrada (Activa nivel alto)NominalMínimo
V+24+12
Tensión de entrada (Activa nivel bajo)NominalMáximo
V0
+7
Corriente de entrada (aproximada, por entrada)
mA 7
Intervalo de muestreo ms 1
Descripción Unidad Valor
Corriente de salida(máximo, cada salida)
mA 50
Intervalo de actualización Inmediato
Descripción Unidad Valor
Contactos Normalmente cerrado
Clasificación del contacto (resistivo) 1 A @ 24 V CCo
0,5 A @ 125 V CA
Máxima corriente portadora A 2
Potencia máxima de conmutación 62,5 VA, 30 W
Voltaje de conmutación máximo 125 V CA, 60 V CC
Corriente máxima de conmutación A 1
Resistencia de contacto (máximo) mΩ 100
Intervalo de actualización Inmediato
MN1933WES Especificaciones 7-3

7.1.8 Entradas de encoder (X12 - X16)
7.1.9 Salidas de control paso a paso (X10 & X11)
7.1.10Interfaz CANopen (X17)
7.1.11Interfaz Baldor CAN (X18)
Descripción Unidad Valor
Entrada de encoder Diferencial A/B, índice Z
Frecuencia de entrada máxima(canales A y B)
MHz2.5
Suministro de energía de salida a los encoders
Total, si se toma del PC anfitriónTotal, si se toma del suministro de
usuario
5 V, 500 mA máx.
30 V, 3 A máx.
Longitud máxima del cable recomendada
30,5 m (100 pies)
Descripción Unidad Valor
Tipo de salida Pulso (paso) y dirección
Frecuencia de salida máxima MHz 3
Voltaje de salida V +5
Corriente de salida mA 20 máx.
Descripción Unidad Valor
Señal 2 hilos, aislados
Canales 1
Velocidad de transmisión de bits Kbit/s10, 20, 50, 100, 125, 250, 500, 800,
1000
Protocolo CANopen
Descripción Unidad Valor
Señal 2-hilos
Canales 2
Velocidad de transmisión de bits Kbit/s 10, 20, 50, 125, 250, 500, 800, 1000
Protocolo CAN Baldor
7-4 Especificaciones MN1933WES

7.1.12Especificaciones ambientales
Ver también la sección 3.1.1.
Descripción Unidad
Rango de temperatura de funcionamiento
Mín. Máx.
°C
°F
0
+32
+45
+113
Rango de temperatura de almacenamiento
°C
°F
0
+32
+70
+158
Humedad máxima % 93% para temperaturas de hasta 31 °C (87 °F) sin condensación, con una disminución lineal hasta el 50% de humedad relativa a 45 °C (113 °F),
(sin-condensación)
Vibración 1 G, 10-150 Hz
MN1933WES Especificaciones 7-5

7-6 Especificaciones MN1933WES

AccesoriosA Accesorios
A.1 IntroducciónLos módulos de distribución están disponibles para su empleo con el NextMove PCI-2.
A.1.1 Módulo de distribución de NextMove PCI-2Los módulos de distribución están disponibles para su empleo con el NextMove PCI-2,facilitando terminales atornillables de uno o dos componentes para la entrada/salida,conexiones para alimentación y relé, con conectores tipo D de 9 terminales para losencoders y motores paso a paso. Las conexiones CAN se extraen de un CANopen tipo Dcompatible para CAN1 (CANopen) y un RJ45 para CAN2 (CAN de Baldor) Para másdetalles acerca de cada conector, ver la sección 4. El módulo de distribución se conecta alNextMove PCI-2 utilizando un cable de 100 terminales.
Figura 25: Módulo de distribución de NextMove PCI-2
Las dimensiones del módulo de distribución son aproximadamente de 292 mm (11,50pulgadas) de longitud por 70 mm (2,76 pulgadas) de ancho por 62 mm (2,45 pulgadas) dealto. Está diseñado para su montaje sobre un riel DIN simétrico de 35 mm (EN 50 022, DIN46277-3) o sobre un riel de perfil G (EN 50 035, DIN46277-1). Se encuentran disponiblescables ya preparados de diferentes longitudes para su conexión entre el módulo dedistribución y el NextMove PCI-2:
Pieza Descripción
PCI003-501Módulo de distribución: Terminales atornillables de un componente y acondicionamiento de la señal.
PCI003-502Módulo de distribución: Terminales atornillables de dos componentes y acondicionamiento de la señal.
CBL021-501Cable de 1,0 m (3,3 pies) y 100 terminales para la fijación de la tarjeta al módulo de distribución
CBL021-502Cable de 1,5 m (4,9 pies) y 100 terminales para la fijación de la tarjeta al módulo de distribución
CBL021-503Cable de 3,0 m (9,8 pies) y 100 terminales para la fijación de la tarjeta al módulo de distribución
A
MN1933WES Accesorios A-1

Las conexiones blindadas del módulo de distribución están todas conectadas internamente.Entre ellas:
Los terminales de 'pantalla' presentes en gran número de conectores.
El apantallado trasero de metal de todos los conectores tipo D, los conectores CAN y elconector de 100 terminales.
El espárrago situado bajo los conectores X3 y X4.
Si se utiliza el módulo de distribución (Índice 2) para reemplazar un módulo de distribuciónexistente de índice 1, deberán modificarse las conexiones de alimentación. Las conexionesque fueron previamente realizadas a los terminales 3, 4, 5 y 6 del conector de alimentaciónJ10 en la placa de índice 1 deberán ahora ser conectadas únicamente a los terminales 5 y 6del conector X9 de alimentación del módulo de índice 2. El número de índice de la placaestá impreso bajo la denominación principal, cerca de los conectores X5 y X6.
A.1.2 Adaptador de sistema PC para NextMoveEl adaptador de sistema PC para NextMove toma la salida del conector de 100 terminalesde NextMove PCI-2 y la convierte para que sea compatible con el cable del PC paraNextMove, permitiendo la conversión de la máquina de NextMove PC a NextMove PCI-2con un cambio mínimo al cableado físico de la máquina.
Nota: Si el módulo de distribución de NextMove PC también está siendo utilizado, losbancos de entradas digitales utilizan una conexión común. El suministro USRV+ se utiliza para determinar el sentido de las entradas digitales. La conexión deCGND a la conexión común hará que las entradas sean activas a nivel alto(activas cuando se apliquen +24 VCC). La conexión de USR V+ a la conexióncomún hará que las entradas sean activas a nivel bajo (activas cuando seapliquen 0 V). Los puentes del adaptador del sistema seleccionan si se conectaUSR V+ o CGND a la conexión común.
A.1.3 Placa de función buffer/divisor de encoderSe trata de una placa PCB autónoma que toma la señal de un encoder, tanto sea de terminalúnico como diferencial, y proporciona salidas diferenciales. Esto es útil para una señal deencoder en 'bus de encadenamiento' partiendo de un maestro a través de un cierto númerode controladores. El PCB mide 100 mm x 85 mm (3,94 pulg. x 3,35 pulg.). Suministrado en
Pieza Descripción
OPT026-506Se hace posible la conexión de NextMove PCI-2 a un sistema NextMove PC.
A-2 Accesorios MN1933WES

conjunto con retén para PCB sobre riel TS35 DIN, las dimensiones generales de la unidadpasan a ser de 110 mm x 90 mm (4,33 pulg. x 3,54 pulg.).
A.1.4 RecambiosLos siguientes elementos están situados en el módulo de distribución:
A.1.5 Cables de realimentación
Los cables incluidos en la Tabla 2 conectan la señal de 'Salida de encoder' de un
amplificador de accionamiento (por ejemplo MicroFlex, FlexDriveII, Flex+DriveII o
MintDriveII) a los conectores de entrada 'Entrada de encoder' de la placa de distribución delNextMove PCI-2. Se necesita un cable para cada servoeje. Ver la sección 4.5.1.1 para laconfiguración de los terminales del conector.
Si no está utilizando un cable de los enumerados arriba, asegúrese de obtener un cable de
par trenzado apantallado de 0,34 mm2 (22 AWG) como mínimo, con apantallado exterior. Serecomienda que el cable no supere los 30,5 m (100 pies) de longitud. La capacitanciamáxima de cable a cable o de cable a pantalla es de 50 pF por 300 mm (1 pie) de longitud, aun máximo de 5000 pF por 30,5 m (100 pies).
Pieza Descripción
OPT029-501Divisor de encoder de 4 vías - permite que un tren de impulsos de un encoder de terminal único o diferencial sea compartido entre cuatro dispositivos
OPT029-502Divisor de encoder de 8 vías - permite que un tren de impulsos de un encoder de terminal único o diferencial sea compartido entre ocho dispositivos
Pieza Descripción
OPT025-501Cable para hacer posible la conexión de NextMove PCI-2 a un sistema NextMove PC.
OPT025-502Transceptor aislado de CAN (módulo híbrido SIL).Soporta velocidades de hasta 1 Mbit/s.
OPT025-503Transceptor no aislado de CAN (módulo híbrido SIL).Soporta velocidades de hasta 500 Kbit/s.
Descripción del conjunto de cables
PiezaLongitud
m pies
Cable de realimentación de amplificador de accionamiento a
módulo de distribución de NextMove PCI-2, con conectores tipo D de 9 terminales en ambos
extremos (uno macho, uno hembra)
CBL005MF-E3ACBL010MF-E3ACBL015MF-E3ACBL020MF-E3ACBL030MF-E3ACBL040MF-E3ACBL050MF-E3A
0.51
1.52.03.04.05.0
1.63.35
6.69.8
13.116.4
Tabla 5: Cables de realimentación de amplificador de accionamiento a NextMove PCI-2
MN1933WES Accesorios A-3

A.1.6 Nodos CAN BaldorPueden ampliarse fácilmente las entradas/salidas digitales en el NextMove PCI-2empleando la conexión CAN (CAN2) de Baldor. Ello proporciona una interfaz de bus seriede alta velocidad para toda una gama de dispositivos de entrada/salida, entre los que seincluyen:
inputNode 8: 8 entradas digitales optoaisladas.
relayNode 8: 8 salidas de relé.
outputNode 8: 8 salidas digitales optoaisladas con protección ante cortocircuito ysobrecorriente.
ioNode 24/24: 24 entradas optoaisladas y 24 salidas optoaisladas
keypadNode: Panel de operador con función general (versiones de 3 y 4 ejes).
Pieza Descripción
ION001-501 8 entradas digitales
ION002-501 8 salidas de relé
ION003-501 8 salidas digitales
ION004-501 24 entradas digitales y 24 salidas digitales
KPD002-502 teclado de 27 teclas y pantalla LCD de 4 líneas
KPD002-505 teclado de 41 teclas y pantalla LCD de 4 líneas
A-4 Accesorios MN1933WES

A.1.7 Paneles HMISe encuentra disponible toda una gama de paneles HMI (Interfaz hombre-máquina) concomunicación serie o CANopen. Algunos disponen de capacidad de pantalla en color y/otáctil, y pueden ser programados empleando el software dedicado HMI Designer.
A.1.8 Mint NC (software de paso de diseño CAD a movimiento)El software Mint NC proporciona a los constructores de máquinas una soluciónextremadamente rápida y flexible para la creación de maquinaria de contorneado yperfilado, así como su automatización. MintNC proporciona un entorno basado en PC queimportará la información en formatos CAD estándar industriales como G-code, HPGL y DXF,y generará los comandos de movimiento requeridos en tiempo real.
Para más detalles ver www.abbmotion.com.
MN1933WES Accesorios A-5

A-6 Accesorios MN1933WES

Resumen de palabras clave de MintB Resumen de palabras clave de Mint
B.1 IntroducciónLa siguiente tabla resume las palabras clave de Mint soportadas por NextMove PCI-2.Obsérvese que debido a los continuos desarrollos de NextMove PCI-2 y del lenguaje Mint,esta lista queda sujeta a cambios significativos. Consulte el último fichero de ayuda de Mintpara detalles de palabras clave nuevas o modificadas.
B.1.1 Listado de palabras clave
Palabra clave Descripción
ABORT Abortar el movimiento en todos los ejes.
ABORTMODE Controlar la acción por defecto tomada en el caso de una acción de abortar.
ACCEL Definir la velocidad de aceleración de un eje.
ACCELDEMAND Leer la demanda instantánea de aceleración.
ACCELJERK Definir la velocidad de sacudida durante los períodos de aceleración.
ACCELJERKTIME Definir la velocidad de sacudida durante los períodos de aceleración.
ACCELTIME Definir la velocidad de aceleración de un eje.
ADC Leer el valor de una entrada analógica.
ADCERROR Relectura de las entradas analógicas actualmente en estado de error.
ADCERRORMODE Controla la acción por defecto tomada en el caso de que se supere un límite del ADC (Convertidor analógico-digital) en un canal asociado.
ADCGAIN Fijar la ganancia a aplicar a una entrada del ADC.
ADCMAX Establece el valor límite superior analógico para la entrada analógica especificada.
ADCMIN Establece el valor límite inferior analógico para la entrada analógica especificada.
ADCMODE Fijar el modo de entrada analógica.
ADCMONITOR Especifica las entradas analógicas que un eje controlará para la verificación del límite analógico.
ADCOFFSET Fijar el desplazamiento a aplicar a una entrada del ADC.
ADCTIMECONSTANT Fijar la constante de tiempo del filtro de paso bajo aplicado a una entrada del ADC.
B
MN1933WES Resumen de palabras clave de Mint B-1
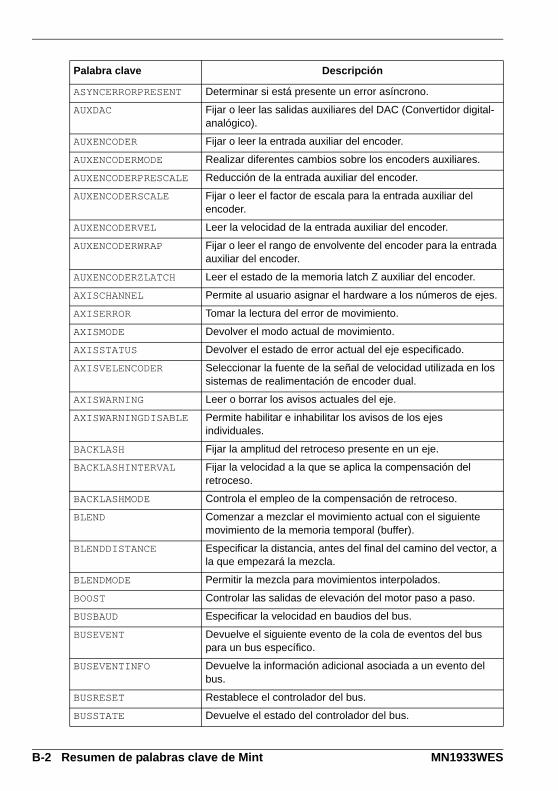
ASYNCERRORPRESENT Determinar si está presente un error asíncrono.
AUXDAC Fijar o leer las salidas auxiliares del DAC (Convertidor digital-analógico).
AUXENCODER Fijar o leer la entrada auxiliar del encoder.
AUXENCODERMODE Realizar diferentes cambios sobre los encoders auxiliares.
AUXENCODERPRESCALE Reducción de la entrada auxiliar del encoder.
AUXENCODERSCALE Fijar o leer el factor de escala para la entrada auxiliar del encoder.
AUXENCODERVEL Leer la velocidad de la entrada auxiliar del encoder.
AUXENCODERWRAP Fijar o leer el rango de envolvente del encoder para la entrada auxiliar del encoder.
AUXENCODERZLATCH Leer el estado de la memoria latch Z auxiliar del encoder.
AXISCHANNEL Permite al usuario asignar el hardware a los números de ejes.
AXISERROR Tomar la lectura del error de movimiento.
AXISMODE Devolver el modo actual de movimiento.
AXISSTATUS Devolver el estado de error actual del eje especificado.
AXISVELENCODER Seleccionar la fuente de la señal de velocidad utilizada en los sistemas de realimentación de encoder dual.
AXISWARNING Leer o borrar los avisos actuales del eje.
AXISWARNINGDISABLE Permite habilitar e inhabilitar los avisos de los ejes individuales.
BACKLASH Fijar la amplitud del retroceso presente en un eje.
BACKLASHINTERVAL Fijar la velocidad a la que se aplica la compensación del retroceso.
BACKLASHMODE Controla el empleo de la compensación de retroceso.
BLEND Comenzar a mezclar el movimiento actual con el siguiente movimiento de la memoria temporal (buffer).
BLENDDISTANCE Especificar la distancia, antes del final del camino del vector, a la que empezará la mezcla.
BLENDMODE Permitir la mezcla para movimientos interpolados.
BOOST Controlar las salidas de elevación del motor paso a paso.
BUSBAUD Especificar la velocidad en baudios del bus.
BUSEVENT Devuelve el siguiente evento de la cola de eventos del bus para un bus específico.
BUSEVENTINFO Devuelve la información adicional asociada a un evento del bus.
BUSRESET Restablece el controlador del bus.
BUSSTATE Devuelve el estado del controlador del bus.
Palabra clave Descripción
B-2 Resumen de palabras clave de Mint MN1933WES

CAM Ejecutar el perfil de leva.
CAMAMPLITUDE Modificar la amplitud del perfil de leva.
CAMBOX Poner en marcha o parar un canal CAMBox.
CAMBOXDATA Cargar datos asociados con un canal CAMBox.
CAMEND Definir un punto final en la tabla de levas en el caso de que se requieran múltiples levas.
CAMINDEX Devuelve el número de segmento de leva en ejecución actual.
CAMPHASE Permite desplazar adelante o atrás un perfil de leva sobre un número fijo de segmentos de leva.
CAMPHASESTATUS Obtener el estado de CAMPHASE para un eje específico.
CAMSTART Definir un punto de inicio en la tabla de levas en el caso de que se requieran múltiples levas.
CAMTABLE Especificar los nombres de matriz a utilizar en un perfil de leva de un eje especificado.
CANCEL Detener el movimiento y borrar los errores de un eje.
CANCELALL Detener el movimiento y borrar los errores de todos los ejes.
CAPTURE Controla la operación de captura.
CAPTURECHANNEL-UPLOAD
Permitir que la totalidad de un canal de valores de datos capturados sea cargado en una matriz.
CAPTUREDURATION Definir la duración total de la captura de datos.
CAPTUREEVENT Configura la captura para que se detenga en base a un evento.
CAPTUREEVENTAXIS Configura el eje para controlar el evento de activación de captura.
CAPTUREEVENTDELAY Define el retardo post-activación para la captura de eventos.
CAPTUREINTERVAL Define el intervalo entre capturas de datos, relativo a la frecuencia del servo.
CAPTUREMODE Configurar o leer el modo para un canal de captura.
CAPTUREMODE-PARAMETER
Especificar un parámetro asociado con CAPTUREMODE.
CAPTURENUMPOINTS Leer el número de puntos capturados por canal.
CAPTUREPERIOD Definir el intervalo entre capturas de datos.
CAPTUREPOINT Permitir la lectura de los valores de captura individuales.
CHANNELTYPE Determinar qué hardware está disponible para un canal específico.
CIRCLEA Ejecutar un movimiento circular con coordenadas absolutas.
CIRCLER Ejecutar un movimiento circular con coordenadas relativas.
COMMS Accede a la matriz reservada de comunicaciones.
Palabra clave Descripción
MN1933WES Resumen de palabras clave de Mint B-3
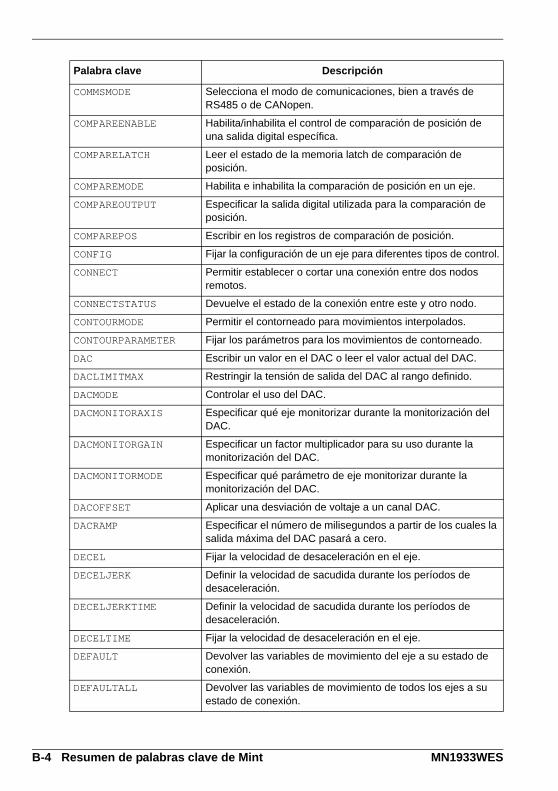
COMMSMODE Selecciona el modo de comunicaciones, bien a través de RS485 o de CANopen.
COMPAREENABLE Habilita/inhabilita el control de comparación de posición de una salida digital específica.
COMPARELATCH Leer el estado de la memoria latch de comparación de posición.
COMPAREMODE Habilita e inhabilita la comparación de posición en un eje.
COMPAREOUTPUT Especificar la salida digital utilizada para la comparación de posición.
COMPAREPOS Escribir en los registros de comparación de posición.
CONFIG Fijar la configuración de un eje para diferentes tipos de control.
CONNECT Permitir establecer o cortar una conexión entre dos nodos remotos.
CONNECTSTATUS Devuelve el estado de la conexión entre este y otro nodo.
CONTOURMODE Permitir el contorneado para movimientos interpolados.
CONTOURPARAMETER Fijar los parámetros para los movimientos de contorneado.
DAC Escribir un valor en el DAC o leer el valor actual del DAC.
DACLIMITMAX Restringir la tensión de salida del DAC al rango definido.
DACMODE Controlar el uso del DAC.
DACMONITORAXIS Especificar qué eje monitorizar durante la monitorización del DAC.
DACMONITORGAIN Especificar un factor multiplicador para su uso durante la monitorización del DAC.
DACMONITORMODE Especificar qué parámetro de eje monitorizar durante la monitorización del DAC.
DACOFFSET Aplicar una desviación de voltaje a un canal DAC.
DACRAMP Especificar el número de milisegundos a partir de los cuales la salida máxima del DAC pasará a cero.
DECEL Fijar la velocidad de desaceleración en el eje.
DECELJERK Definir la velocidad de sacudida durante los períodos de desaceleración.
DECELJERKTIME Definir la velocidad de sacudida durante los períodos de desaceleración.
DECELTIME Fijar la velocidad de desaceleración en el eje.
DEFAULT Devolver las variables de movimiento del eje a su estado de conexión.
DEFAULTALL Devolver las variables de movimiento de todos los ejes a su estado de conexión.
Palabra clave Descripción
B-4 Resumen de palabras clave de Mint MN1933WES

DPREVENT Interrumpir el PC anfitrión y generar un evento de atrapamiento, empleando la RAM del Puerto Dual (DPR).
DPRFLOAT Leer y escribir un valor de 32 bits de coma flotante en la RAM de puerto dual (DPR).
DPRLONG Leer y escribir un valor de 32 bits entero en la RAM de puerto dual (DPR).
DRIVEENABLE Habilitar o inhabilitar el accionamiento para el eje especificado.
DRIVEENABLEOUTPUT Especificar una salida como habilitación del accionamiento.
ENCODER Fijar o leer el valor del encoder del eje.
ENCODERMODE Realizar diferentes cambios sobre los encoders.
ENCODERPRESCALE Reducción de la entrada del encoder.
ENCODERSCALE Fijar o leer el factor de escala para el canal del encoder.
ENCODERVEL Leer la velocidad de un canal del encoder.
ENCODERWRAP Fijar o leer el rango de envolvente del encoder para el canal del encoder.
ENCODERZLATCH Obtener y reinicializar el estado de memoria latch Z del encoder de un eje.
ERRORDECEL Fijar la velocidad de desaceleración del eje para los paros alimentados, en el caso de un error o entrada de paro.
ERRORINPUT Fijar o devolver la entrada digital a utilizar como la entrada de error para el eje especificado.
ERRORINPUTMODE Controlar la acción por defecto tomada en el caso de una entrada externa de error.
ERRORMASK Impedir condiciones específicas de error llamando al evento ONERROR.
EVENTACTIVE Indica si un evento está actualmente activo.
EVENTDISABLE Habilitar e inhabilitar selectivamente eventos de Mint.
EVENTPENDING Indicar si un evento está actualmente pendiente.
FACTORYDEFAULTS Restablecer las entradas de la tabla de parámetros a sus valores por defecto.
FASTAUXENABLE Borrar manualmente la memoria latch auxiliar de posición rápida del encoder.
FASTAUXENCODER Devolver el valor auxiliar instantáneo del encoder que se registró en la interrupción rápida.
FASTAUXLATCH Leer la memoria latch auxiliar de interrupción rápida del encoder.
FASTAUXLATCHMODE Fija la acción por defecto a realizar para borrar la memoria latch auxiliar de interrupción rápida del encoder.
Palabra clave Descripción
MN1933WES Resumen de palabras clave de Mint B-5

FASTAUXSELECT Seleccionar cuál de las entradas de captura de posición rápida capturará un canal auxiliar de encoder.
FASTENABLE Borrar manualmente la memoria latch de posición rápida del encoder.
FASTENCODER Devolver el valor instantáneo del encoder que se registró en la interrupción rápida.
FASTLATCH Leer la memoria latch de interrupción rápida del encoder.
FASTLATCHMODE Fijar la acción por defecto a realizar para borrar la memoria latch de posición rápida del encoder.
FASTPOS Devolver la posición instantánea del eje que se registró en la interrupción rápida.
FASTSELECT Seleccionar cuál de las entradas (o salidas) de captura de posición rápida originará la captura de la posición del eje.
FEEDRATE Seleccionar la velocidad de cambio de un movimiento individual cargado en el buffer de movimiento.
FEEDRATEMODE Para controlar el uso de la velocidad de cambio, aceleración, desaceleración y anulación de velocidad de alimentación.
FEEDRATEOVERRIDE Anula la velocidad actual o la velocidad de alimentación que se está utilizando.
FEEDRATEPARAMETER Fijar los parámetros para la velocidad actual o velocidad de alimentación que se está utilizando.
FIRMWARERELEASE Leer el número de liberación del firmware.
FLY Crear una cizalla móvil por seguimiento de un eje maestro con aceleración y desaceleración controlada.
FOLERROR Devolver el valor de error de seguimiento instantáneo.
FOLERRORFATAL Fijar el error de seguimiento máximo permisible antes de que se haya generado un error.
FOLERRORMODE Determinar la acción tomada en el eje en el evento de un error de seguimiento.
FOLERRORWARNING Fija el umbral del error de seguimiento antes de que se genere un aviso del eje.
FOLLOW Habilitar el seguimiento del encoder con una relación de engranajes especificada.
FOLLOWMODE Definir el modo de funcionamiento de la palabra clave FOLLOW.
FREQ Fijar una salida de frecuencia constante.
GEARING Fijar el valor de porcentaje para compensación del engranaje.
GEARINGMODE Conectar o desconectar la compensación de engranajes.
Palabra clave Descripción
B-6 Resumen de palabras clave de Mint MN1933WES

GLOBALERROROUTPUT Permite al usuario especificar una salida de error global que será desactivada en el caso de un error.
GO Iniciar un movimiento sincronizado.
GROUP Fijar o leer si un nodo es un miembro de un grupo.
GROUPCOMMS Realizar la escritura sobre las matrices de comunicaciones de todos los nodos dentro de un grupo especificado.
GROUPMASTER Fijar un nodo como el maestro de un grupo o devolver la ID del nodo del maestro del grupo.
GROUPMASTERSTATUS Determinar si el nodo actual es el maestro del grupo.
GROUPSTATUS Determinar si el nodo actual es un miembro del grupo.
HELIXA Cargar un movimiento de hélice en el buffer de movimiento.
HELIXR Cargar un movimiento de hélice en el buffer de movimiento.
HOME Encontrar la posición de inicio de un eje.
HOMEBACKOFF Fijar el factor de velocidad de retirada a inicio.
HOMECREEPSPEED Fijar la velocidad de fluencia para movimientos a inicio.
HOMEINPUT Fijar que una entrada digital sea la entrada de conmutación para posición de inicio para el eje especificado.
HOMEPHASE Encontrar la fase de la secuencia de paso a inicio actualmente en curso.
HOMEPOS Leer la posición del eje tras la finalización de la secuencia de paso a posición de inicio.
HOMESPEED Fijar la velocidad para la fase inicial de búsqueda de la secuencia de paso a posición de inicio.
HOMESTATUS Fijar o leer el estado de una secuencia de paso a posición de inicio.
HOMESWITCH Devolver el estado de la entrada para paso a posición de inicio.
HTA Inicia el modo de movimiento HTA (Mantener modo analógico)
HTACHANNEL Especificar la entrada analógica a utilizar para un eje en particular mientras se está en modo HTA (Mantener modo analógico).
HTADAMPING Especifica el término de atenuación utilizado en el algoritmo HTA (Mantener modo analógico).
HTADEADBAND Especifica la banda muerta de error analógico.
HTAFILTER Fija el factor de filtro para la entrada analógica.
HTAKINT Especifica el término de ganancia integral utilizado en el bucle de fuerza HTA (Mantener modo analógico).
HTAKPROP Especifica el término de ganancia proporcional utilizado en el bucle de fuerza HTA (Mantener modo analógico).
Palabra clave Descripción
MN1933WES Resumen de palabras clave de Mint B-7

IDLE Indica si un movimiento ha acabado su ejecución y el eje ha acabado de moverse.
IDLEMODE Controlar las verificaciones realizadas cuando se determina si un eje está en reposo.
IDLEPOS Lee o fija el límite de error de seguimiento en reposo.
IDLESETTLINGTIME Leer el tiempo necesario para que un eje pase a estar en reposo.
IDLETIME Especificar el período en el que el eje debe satisfacer sus condiciones de reposo antes de pasar a estar en reposo.
IDLEVEL Lee o fija el límite de velocidad en reposo.
IMASK Enmascarar eventos Mint IN0 .. INx.
IN Leer el estado de todas las entradas en un banco de entrada.
INCA Configurar un movimiento incremental en una posición absoluta.
INCR Configurar un movimiento incremental en una posición relativa.
INITERROR Notificar cualquier error detectado durante la puesta en marcha.
INITWARNING Devuelve la suma de una configuración de bits que describe los avisos de inicialización generados en la puesta en marcha.
INPUTACTIVELEVEL Fijar el nivel activo de las entradas digitales.
INPUTDEBOUNCE Fijar o devolver el número de muestras utilizadas para el "antirebote" de un banco de entrada digital.
INPUTMODE Fijar o devolver la suma de una configuración de bits que describe cuáles de las entradas digitales del usuario debe ser activada por flanco o por nivel.
INPUTNEGTRIGGER Fijar o devolver al usuario entradas que pasan a estado activo mediante flancos negativos.
INPUTPOSTRIGGER Fijar o devolver al usuario entradas que pasan a estado activo mediante flancos positivos.
INSTATE Leer el estado de todas las entradas digitales.
INSTATEX Leer el estado de una entrada digital individual.
INX Leer el estado de una entrada digital individual.
JOG Fijar un eje para control de velocidad.
KACCEL Fijar la ganancia de avance de alimentación de aceleración del servobucle.
KDERIV Fijar la ganancia derivativa del servobucle en los ejes del servo.
Palabra clave Descripción
B-8 Resumen de palabras clave de Mint MN1933WES

KEYS Volver a asignar la distribución de las teclas de un nodo teclado (KeypadNode) CAN de Baldor.
KINT Fijar la ganancia integral del servobucle.
KINTLIMIT Restringir el efecto general de la ganancia integral KINT.
KINTMODE Controlar cuándo se aplicará una acción integral en el servobucle.
KNIFE Carga un movimiento de cuchilla tangencial en el eje especificado.
KNIFEAXIS Especifica el eje maestro que el eje de la cuchilla debería seguir.
KNIFEMODE Especifica el modo de cuchilla con el que se cargan los movimientos en el eje maestro de cuchilla.
KNIFESTATUS Leer o fijar el estado del eje de cuchilla.
KPROP Fijar la ganancia proporcional para el controlador de posición.
KVEL Fijar el término de ganancia de la realimentación de velocidad del servobucle.
KVELFF Fijar el término de avance de alimentación de velocidad para el controlador de posición.
LIMIT Devolver el estado de las entradas del interruptor limitador directa e inversa para el eje dado.
LIMITFORWARD Devolver el estado de la entrada del interruptor limitador directa para el eje dado.
LIMITFORWARDINPUT Fijar la entrada digital del usuario configurada para ser el tope adelante de la entrada del interruptor limitador de recorrido para el eje especificado.
LIMITMODE Controlar la acción por defecto tomada en el caso de que la entrada hardware del interruptor limitador adelante o atrás pase a estado activo.
LIMITREVERSE Devolver el estado de la entrada del interruptor limitador inversa para el eje dado.
LIMITREVERSEINPUT Fijar la entrada digital del usuario configurada para ser el tope atrás de la entrada del interruptor limitador de recorrido para el eje especificado.
LOOPTIME Fijar el intervalo de actualización del servobucle en microsegundos.
MASTERCHANNEL Fijar o leer el canal del dispositivo de entrada utilizado para el engranaje.
MASTERDISTANCE Fijar la distancia en el eje maestro por encima de la cual el esclavo recorrerá un "segmento" según los tipos de movimiento maestro-esclavo.
Palabra clave Descripción
MN1933WES Resumen de palabras clave de Mint B-9

MASTERSOURCE Fijar o leer la fuente del dispositivo de entrada utilizado para el engranaje.
MAXSPEED Fijar un límite para la velocidad requerida en un eje.
MISCERROR Leer o borrar los diferentes indicadores (flags) de error.
MISCERRORDISABLE Habilitar o inhabilitar diferentes errores que realizan la llamada al evento de errores.
MOVEA Configurar un movimiento posicional en una posición absoluta.
MOVEBUFFERFREE Devolver el número de espacios libres en el buffer de movimiento para el eje especificado.
MOVEBUFFERID Fijar o releer un identificador de 16 bits del buffer de movimiento.
MOVEBUFFERIDLAST Leer un identificador de 16 bits del buffer de movimiento.
MOVEBUFFERLOW Fijar o devolver el número de espacios libres en el buffer de movimiento antes de que se genere un evento de nivel bajo de buffer de movimiento.
MOVEBUFFERSIZE Fijar o devolver el tamaño del buffer de movimiento situado en el eje especificado.
MOVEBUFFERSTATUS Devolver información acerca del buffer de movimiento.
MOVEDWELL Cargar un movimiento de parada del seguidor en el buffer de movimiento.
MOVEOUT Cargar una configuración de bits de salida digital en el buffer de movimiento.
MOVEOUTX Cargar un cambio de estado para una salida digital específica en el buffer de movimiento.
MOVEPULSEOUTX Cargar un cambio de estado por impulso para una salida digital específica en el buffer de movimiento.
MOVER Configurar un movimiento posicional en una posición relativa.
NODE Fijar o leer la ID del nodo que este utiliza.
NODELIVE Determinar si un nodo CAN de bus está actualmente activo o no activo.
NODESCAN Explorar un bus CAN determinado a la búsqueda de un nodo específico.
NODETYPE Añadir o eliminar un nodo CAN a/de la red CAN. También puede realizarse la lectura para determinar el tipo de nodo.
NUMBEROF Devolver la información acerca de las capacidades del controlador.
NVFLOAT Leer o escribir un valor de coma flotante en una memoria no volátil.
NVLONG Leer o escribir un valor entero largo en una memoria no volátil.
Palabra clave Descripción
B-10 Resumen de palabras clave de Mint MN1933WES

NVRAMDEFAULT Borrar los contenidos de una memoria RAM no volátil (NVRAM).
OFFSET Llevar a cabo un movimiento posicional de desplazamiento.
OFFSETMODE Definir el modo de funcionamiento de la palabra clave OFFSET.
OUT Fijar o leer el estado de todas las salidas en un banco de salida.
OUTPUTACTIVELEVEL Fijar el nivel activo de las salidas digitales.
OUTX Fijar o leer una salida digital individual.
PLATFORM Devolver el tipo de plataforma.
POS Fijar o leer la posición actual del eje.
POSDEMAND Fijar o leer la demanda de posición instantánea.
POSREMAINING Indicar la distancia de movimiento restante.
POSROLLOVER Conteo del número de envolventes del valor de posición del eje.
POSROLLOVERDEMAND Devolver el número de envolventes de posición requeridos por el movimiento actual.
POSTARGET Lectura de la posición objetivo del movimiento posicional actual.
POSTARGETLAST Lectura de la posición objetivo del último movimiento en el buffer de movimiento.
PRECISIONINCREMENT Fija o lee la distancia teórica entre cada uno de los valores en las tablas de compensación del tornillo de avance.
PRECISIONMODE Controla la acción de la compensación del tornillo de avance.
PRECISIONOFFSET Fija la distancia entre el inicio del tornillo de avance y la posición cero del eje.
PRECISIONTABLE Carga las tablas de compensación del tornillo de avance.
PRODUCTPOWERCYCLES Devolver el número de veces que el controlador ha sido apagado y vuelto a encender.
PRODUCTSERIALNUMBER Devolver el número de serie del controlador.
PROFILEMODE Seleccionar el tipo de perfil de velocidad a utilizar.
PROFILETIME Fijar la velocidad de actualización de seguimiento del perfil.
PULSEOUTX Activar una salida digital para un número especificado de milisegundos.
RELAY Habilitar o inhabilitar el relé.
REMOTEADC Leer el valor de una entrada analógica remota (ADC).
REMOTEADCDELTA Controlar la velocidad de cambio de una entrada analógica remota antes de que se envíe un mensaje de REMOTEADC.
Palabra clave Descripción
MN1933WES Resumen de palabras clave de Mint B-11

REMOTEBAUD Especificar la velocidad de transmisión en baudios del bus CAN para un nodo CAN Baldor remoto (Entrada/Salida o teclado).
REMOTEDAC Controlar el valor de un canal de salida analógico remoto (DAC).
REMOTEDEBOUNCE Controlar el número de muestras utilizadas para el "antirrebote" de una entrada de un nodo CAN remoto.
REMOTEEMERGENCY-MESSAGE
Devuelve el código de error del último mensaje de emergencia recibido de un nodo particular CANopen.
REMOTEERROR Lee la información del registro de error CANopen notificada con el último mensaje de emergencia recibido desde un nodo específico.
REMOTEESTOP Controlar el estado de paro de emergencia de un nodo CAN remoto.
REMOTEIN Leer el estado de todas las entradas digitales de un nodo CAN remoto.
REMOTEINBANK Leer el estado de un banco de entradas digitales de un nodo CAN remoto.
REMOTEINHIBITTIME Fijar o leer el tiempo de inhibición PDO de CANopen.
REMOTEINPUTACTIVELEVEL
Controlar el estado activo de las entradas digitales de un nodo CAN remoto.
REMOTEINX Leer el estado de las entradas digitales individuales de un nodo CAN remoto.
REMOTEMODE Controlar el modo de actualización para un nodo remoto.
REMOTENODE Especificar la ID del nodo de un nodo CAN Baldor remoto (Entrada/salida o teclado).
REMOTEOBJECT Acceder al Diccionario de Objetos de cualquier nodo CANopen presente en la red.
REMOTEOBJECTSTRING Acceder a las entradas "Vis-String" en el Diccionario de Objetos de cualquier nodo CANopen presente en la red.
REMOTEOUT Controlar el estado de las salidas digitales de un nodo CAN remoto.
REMOTEOUTBANK Leer el estado de un banco de salidas digitales de un nodo CAN remoto.
REMOTEOUTPUTACTIVELEVEL
Controlar el estado activo de las salidas digitales de un nodo CAN remoto.
REMOTEOUTPUTERROR Leer o restablecer las salidas digitales que se encuentran en error en un nodo remoto CAN de Baldor.
REMOTEOUTX Controlar el estado de las salidas digitales individuales de un nodo CAN remoto.
Palabra clave Descripción
B-12 Resumen de palabras clave de Mint MN1933WES

REMOTEPDOIN Solicitar datos de un nodo en la forma de un mensaje PDO.
REMOTEPDOOUT Forzar un nodo de controlador a transmitir un mensaje PDO de longitud variable con una ID específica de COB. El PDO contendrá hasta 64 bits de datos que pueden transferirse en la forma de dos valores de 32 bits.
REMOTERESET Forzar a un nodo CAN remoto a realizar un restablecimiento del software.
REMOTESTATUS Fijar o leer el registro de estado o un nodo CAN remoto.
RESET Eliminar errores de movimiento, fijar la posición de cero y volver a habilitar el accionamiento.
RESETALL Realizar un restablecimiento de todos los ejes.
SCALEFACTOR Para escalar conteos de encoder de eje, en unidades definidas por el usuario.
SOFTLIMITFORWARD Fijar la posición límite adelante por software para un eje especificado.
SOFTLIMITMODE Fijar o leer la acción tomada por defecto si se supera una posición límite por software directa o inversa.
SOFTLIMITREVERSE Fijar o leer la posición límite inversa por software para un eje especificado.
SPEED Fijar o leer la velocidad de cambio de los movimientos posicionales cargados en el buffer de movimiento.
SPLINE Ejecutar un movimiento de spline (interpolación).
SPLINEEND Definir el segmento final en la tabla de interpolación para un movimiento de interpolación.
SPLINEINDEX Leer el número de segmento de interpolación de ejecución en curso.
SPLINESTART Definir el segmento inicial en la tabla de interpolación para un movimiento de interpolación.
SPLINESUSPENDTIME Fijar la duración de un segmento para un paro controlado durante un movimiento de interpolación.
SPLINETABLE Especificar los nombres de matriz a utilizar en un movimiento de interpolación de un eje especificado.
SPLINETIME Fijar la duración de un segmento para todos los segmentos de un movimiento de interpolación.
STEPPERIO Control manual de los terminales de paso y dirección de un canal de motor paso a paso.
STOP Llevar a cabo un paro controlado durante el movimiento.
STOPINPUT Fijar o leer la entrada digital a utilizar como la entrada de interruptor de paro para el eje especificado.
Palabra clave Descripción
MN1933WES Resumen de palabras clave de Mint B-13

STOPINPUTMODE Fijar o leer la acción tomada en el caso de que una entrada de paro pase a encontrarse activa.
STOPSWITCH Devolver el estado actual de la entrada de paro para el eje.
SUSPEND Parar el movimiento actual.
SYSTEMDEFAULTS Restablecer las entradas de la tabla de parámetros a sus valores por defecto y borrar el programa Mint, la memoria RAM no volátil y el registro de error.
TERMINALADDRESS Fijar o leer la ID del nodo para un nodo CAN asociado con un terminal.
TERMINALDEVICE Fijar o leer el tipo de dispositivo asociado con un terminal dado.
TERMINALMODE Fijar o leer los modos de protocolo handshake para un terminal
TERMINALPORT Fijar o leer el puerto de comunicación asociado con un terminal dado.
TIMEREVENT Fijar o leer la velocidad del evento de temporizador.
TORQUE Ejecutar un control de par (corriente constante) sobre un servoeje.
TRIGGERCHANNEL Especificar la entrada utilizada para la activación, en el caso de activación sobre fuente de eje o encoder.
TRIGGERINPUT Especificar la entrada utilizada para la activación, en el caso de activación sobre una entrada digital.
TRIGGERMODE Controla la activación de un movimiento.
TRIGGERSOURCE Especifica la fuente cuando la activación del eje utiliza una posición de encoder/eje.
TRIGGERVALUE Especifica un valor absoluto sobre el que realizar la activación del movimiento.
VECTORA Ejecutar un movimiento interpolado vectorial en dos o más ejes con coordenadas absolutas.
VECTORR Ejecutar un movimiento interpolado vectorial en dos o más ejes con coordenadas relativas.
VEL Devolver la velocidad instantánea del eje.
VELDEMAND Leer la demanda instantánea de velocidad.
VELFATAL Fijar o leer el umbral para la máxima diferencia entre la demanda y la velocidad real.
VELFATALMODE Controlar la acción por defecto tomada en el caso de superar el umbral de velocidad.
Palabra clave Descripción
B-14 Resumen de palabras clave de Mint MN1933WES

ÍndiceÍndice
AAbreviaturas, 2-4
Accesorios, A-1
Advertencia de seguridad, 1-2
Archivo de ayuda, 5-6
CCalculo de KVELFF, 5-24
Características, 2-1
Cargar la información guardada, 5-34
Conectores, conector de 100 terminales (ranura de expansión), 4-2
Conexión del emulador, 4-23
Configuración deajuste de KPROP, 5-27ajuste de la salida de habilitación del
accionamiento, 5-12cálculo de KVELFF, 5-24eje para el control de corriente, 5-18eje para el control de velocidad, 5-24ejes, 5-10eliminación de errores de estado
estable, 5-23entradas digitales, 5-30prueba de la salida de habilitación del
accionamiento, 5-12, 5-13prueba de un eje de motor paso a paso, 5-29prueba y ajuste de un servoeje, 5-14respuesta amortiguada críticamente, 5-22respuesta sobreamortiguada, 5-21respuesta subamortiguada, 5-20salidas digitales, 5-32selección de ganancias de servobucle, 5-18selección del tipo de eje, 5-10seleccionar una escala, 5-11
Control de bucle cerrado, introducción, 5-15
EE/S analógica, 4-5
entradas analógicas, 4-5salidas analógicas, 4-7
Eje de motor de velocidad paso a pasosalidas de control - X10, 4-22
Eje de motor paso a paso, 5-29Probar la salida, 5-29
Encodercables, A-3
Encoder/divisor función buffer, A-4
Entrada de alimentación, 4-20
Entrada de relé, 4-21
Entrada/Salida, 4-1alimentación - X9, 4-20Alimentación de relé y de CAN - X8, 4-21CAN Baldor - X18, 4-27CANopen - X17, 4-25Conector de 100 terminales (ranura de
expansión), 4-2conexión CAN, 4-24conexión del emulador, 4-23entradas analógicas, 4-5, 7-1entradas de encoder, 4-18, 7-4entradas digitales, 4-9, 7-2, 7-3entradas digitales - X1, 4-11entradas digitales - X2, 4-12entradas digitales - X3, 4-13Resumen de la conexión, 4-31salidas analógicas, 4-7, 7-2salidas de control paso a paso, 7-4salidas de control paso a paso - X10, 4-22salidas digitales, 4-9, 4-15, 7-3Salidas digitales - X4, 4-15salidas digitales - X5, 4-17
MN1933WES Índice

Entrada/Salida (I/O) digital, 4-9configuración, 5-30entradas digitales - resumen, 4-9entradas digitales - X1, 4-11entradas digitales - X2, 4-12entradas digitales - X3, 4-13salidas digitales - resumen, 4-15Salidas digitales - X4, 4-15
Entradasde encoder, 4-18
Escala, selección, 5-11
Especificación ambiental, 3-1, 7-5
Especificaciones, 7-1alimentación, 7-1ambientales, 7-5entradas analógicas, 7-1entradas de encoder, 7-4entradas digitales, 7-2, 7-3Interfaz CAN, 7-4mecánicas, 7-1relé, 7-3salida de relé, 7-3salidas analógicas (demandas), 7-2salidas digitales, 7-3salidas paso a paso, 7-4
Estados de reinicialización, 4-30
FFuentes de energía, 7-1
Funcionamiento, 5-1Instalación de Mint WorkBench, 5-1Instalación del Mint Machine Center, 5-1
GGrabar información de configuración, 5-33
IIdentificación del número de catálogo, 2-3
Indicadores, 6-2LED de reinicio, 6-3LEDs de CAN, 6-2LEDs de estado, 6-2
Indicadores LEDLED de reinicio, 6-3LEDs de CAN, 6-2LEDs de estado, 6-2
Instalación, 3-1Mint Machine Center, 5-1Mint WorkBench, 5-1
Instalación básica, 3-1otros requisitos, 3-2requisitos de ubicación, 3-1Tarjeta NextMove PCI-2, 3-3
Instalación del controlador, 5-1
Interfaz CANcableado, 4-29CAN Baldor, 4-27CANopen, 4-25Conector CAN Baldor, 4-27Conector CANopen, 4-25Entrada de alimentación, 4-21especificaciones, 7-4Introducción, 4-24LEDs, 6-2Nodos CAN Baldor, A-4optoaislamiento, 4-30terminal, 4-29
Introducción al control de bucle cerrado, 5-15
LLEDs de estado, 6-2
MMint Machine Center (MMC), 5-2
puesta en marcha, 5-3
Mint WorkBench, 5-5archivo de ayuda, 5-6cargar la información guardada, 5-34configuración de la entrada/salida
digital, 5-30grabar información de configuración, 5-33puesta en marcha, 5-7
Módulo de distribución, A-1
NNodos CAN Baldor, A-4
Índice MN1933WES

PPaneles HMI, A-5
Precauciones, 1-2
Pruebaeje de motor paso a paso, 5-29servoeje, 5-14Ver también Ajuste
RRealimentación, 4-18, 7-4
cables, A-3
Recepción e inspección, 2-3
Resolución de problemas, 6-1archivo de ayuda, 5-6comunicación, 6-4control del motor, 6-4diagnóstico de problemas, 6-1LED de reinicio, 6-3LEDs de CAN, 6-2LEDs de estado, 6-2SupportMe (Asistencia), 6-1
Respuesta amortiguada críticamente, 5-22
Respuesta sobreamortiguada, 5-21
Respuesta subamortiguada, 5-20
Resumen de palabras clave, B-1
Resumen de palabras clave de Mint, B-1
SSalida de habilitación de accionamiento
ajuste, 5-12prueba, 5-13
Salida de relé, 7-3
Salidas de comando Ver salidas de demanda
Salidas de demanda, 4-7, 5-14
Servoeje, 5-14ajuste de KPROP, 5-27ajuste para el control de corriente, 5-18ajuste para el control de velocidad, 5-24eliminación de errores de estado
estable, 5-29probar la salida de demanda, 5-14
Software MintNC, A-5
UUnidades y abreviaturas, 2-4
VVigilancia (watchdog) del sistema, 4-30
WWorkBench. Ver Mint WorkBench
MN1933WES Índice

Índice MN1933WES

Comentarios
Si tiene alguna sugerencia para mejorar este manual, comuníquese con nosotros. Escribasus comentarios en el espacio provisto a continuación, separe esta página del manual yenvíela por correo a:
ManualsABB LtdMotion Control6 Bristol Distribution ParkHawkley DriveBristolBS32 0BFReino Unido.
También puede enviarnos sus comentarios por correo electrónico a:
Comentario:
continuación...
MN1933WES Comentarios

Gracias por dedicar su tiempo para ayudarnos.
Comentarios MN1933WES


Contacte con nosotros
ABB OyDrivesP.O. Box 184FI-00381 HELSINKIFINLANDIATeléfono +358 10 22 11Fax +358 10 22 22681www.abb.com/drives
ABB Inc.Automation TechnologiesDrives & Motors16250 West Glendale DriveNew Berlin, WI 53151USATeléfono 262 785-3200
1-800-HELP-365Fax 262 780-5135www.abb.com/drives
ABB Beijing Drive Systems Co. Ltd.N.º 1, bloque D, A-10 Jiuxianqiao BeiluDistrito Chaoyang Beijing, P.R. China, 100015Teléfono +86 10 5821 7788Fax +86 10 5821 7618www.abb.com/drives
ABB LtdMotion Control6 Bristol Distribution ParkHawkley DriveBristol, BS32 0BFReino UnidoTeléfono +44 (0) 1454 850000Fax +44 (0) 1454 859001www.abb.com/drives





























