Embed Size (px)
Citation preview

5/17/2018 Control Motor 16F84 - slidepdf.com
http://slidepdf.com/reader/full/control-motor-16f84 1/10
ESCUELA SUPERIOR POLITECNICA DE CHIMBORAZO
ELECTRONICA APLICADA
PRACTICA #4
INTEGRANTES:
FLORES TONY 210126MONTES VICTOR 210064
VALENCIA GEOVANNY 200087 VANEGAS GLORIA 200039
TEMA: Control de Motor paso a paso
OBJETIVO GENERAL
ü Elaborar un programa y un circuito que me permita controlar el movimiento de unmotor paso a paso.
OBJETIVOS ESPECÍFICOS
ü Poner en práctica los conocimientos adquiridos de programación demicrocontroladores durante el semestre.
ü Comprobar el funcionamiento adecuado del circuito cargador el mismo que nospermite programar el PIC.
MARCO TEÓRICO
MOTOR PASO A PASO
En numerosas ocasiones es necesario convertir la energía eléctrica en energía mecánica, esto sepuede lograr, por ejemplo, usando los motores de corriente continua. Pero cuando lo deseado esposicionamiento con un elevado grado de exactitud y/o una muy buena regulación de la velocidad,se puede contar con una gran solución: utilizar un motor paso a paso.
El desarrollo de la presente investigación tiene por objeto dar a conocer los principios básicos defuncionamiento de este tipo de motores, sus características constructivas y las formas básicas dehacer funcionar los motores por medio de dispositivos microcontroladores.
Los motores paso a paso son ideales para la construcción de mecanismos en donde se requierenmovimientos muy precisos. La característica principal de estos motores es el hecho de poder
moverlos un paso a la vez por cada pulso que se le aplique. Este paso puede variar desde 90°hasta pequeños movimientos de tan solo 1.8°, es decir, que se necesitarán 4 pasos en el primer caso (90°) y 200 para el segundo caso (1.8°), para completar un giro completo de 360°.
Estos motores poseen la habilidad de poder quedar enclavados en una posición o bien totalmentelibres. Si una o más de sus bobinas están energizadas, el motor estará enclavado en la posicióncorrespondiente y por el contrario quedará completamente libre si no circula corriente por ningunade sus bobinas.
5/17/2018 Control Motor 16F84 - slidepdf.com
http://slidepdf.com/reader/full/control-motor-16f84 2/10
ESCUELA SUPERIOR POLITECNICA DE CHIMBORAZO
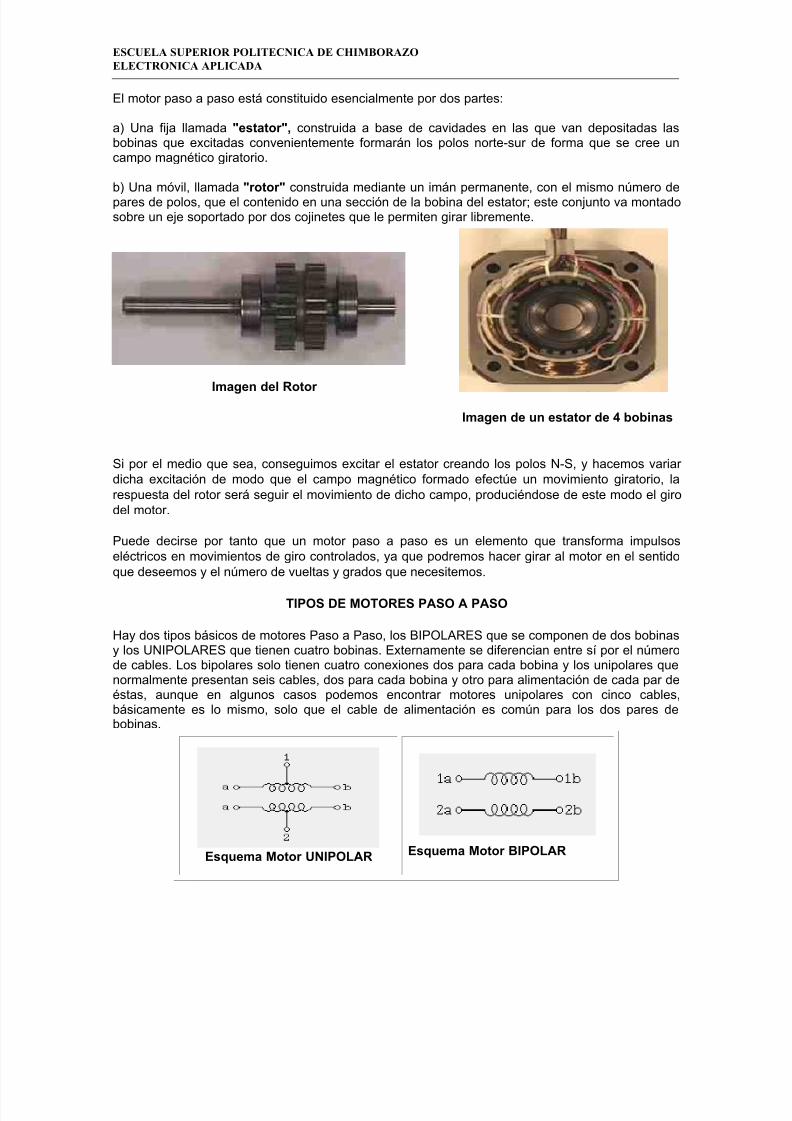
ELECTRONICA APLICADA El motor paso a paso está constituido esencialmente por dos partes:
a) Una fija llamada "estator", construida a base de cavidades en las que van depositadas lasbobinas que excitadas convenientemente formarán los polos norte-sur de forma que se cree uncampo magnético giratorio.
b) Una móvil, llamada "rotor" construida mediante un imán permanente, con el mismo número depares de polos, que el contenido en una sección de la bobina del estator; este conjunto va montadosobre un eje soportado por dos cojinetes que le permiten girar libremente.
Imagen del Rotor
Imagen de un estator de 4 bobinas
Si por el medio que sea, conseguimos excitar el estator creando los polos N-S, y hacemos variar
dicha excitación de modo que el campo magnético formado efectúe un movimiento giratorio, la
respuesta del rotor será seguir el movimiento de dicho campo, produciéndose de este modo el giro
del motor.
Puede decirse por tanto que un motor paso a paso es un elemento que transforma impulsos
eléctricos en movimientos de giro controlados, ya que podremos hacer girar al motor en el sentido
que deseemos y el número de vueltas y grados que necesitemos.
TIPOS DE MOTORES PASO A PASO
Hay dos tipos básicos de motores Paso a Paso, los BIPOLARES que se componen de dos bobinasy los UNIPOLARES que tienen cuatro bobinas. Externamente se diferencian entre sí por el númerode cables. Los bipolares solo tienen cuatro conexiones dos para cada bobina y los unipolares quenormalmente presentan seis cables, dos para cada bobina y otro para alimentación de cada par deéstas, aunque en algunos casos podemos encontrar motores unipolares con cinco cables,básicamente es lo mismo, solo que el cable de alimentación es común para los dos pares debobinas.
Esquema Motor UNIPOLAR Esquema Motor BIPOLAR
5/17/2018 Control Motor 16F84 - slidepdf.com
http://slidepdf.com/reader/full/control-motor-16f84 3/10
ESCUELA SUPERIOR POLITECNICA DE CHIMBORAZO
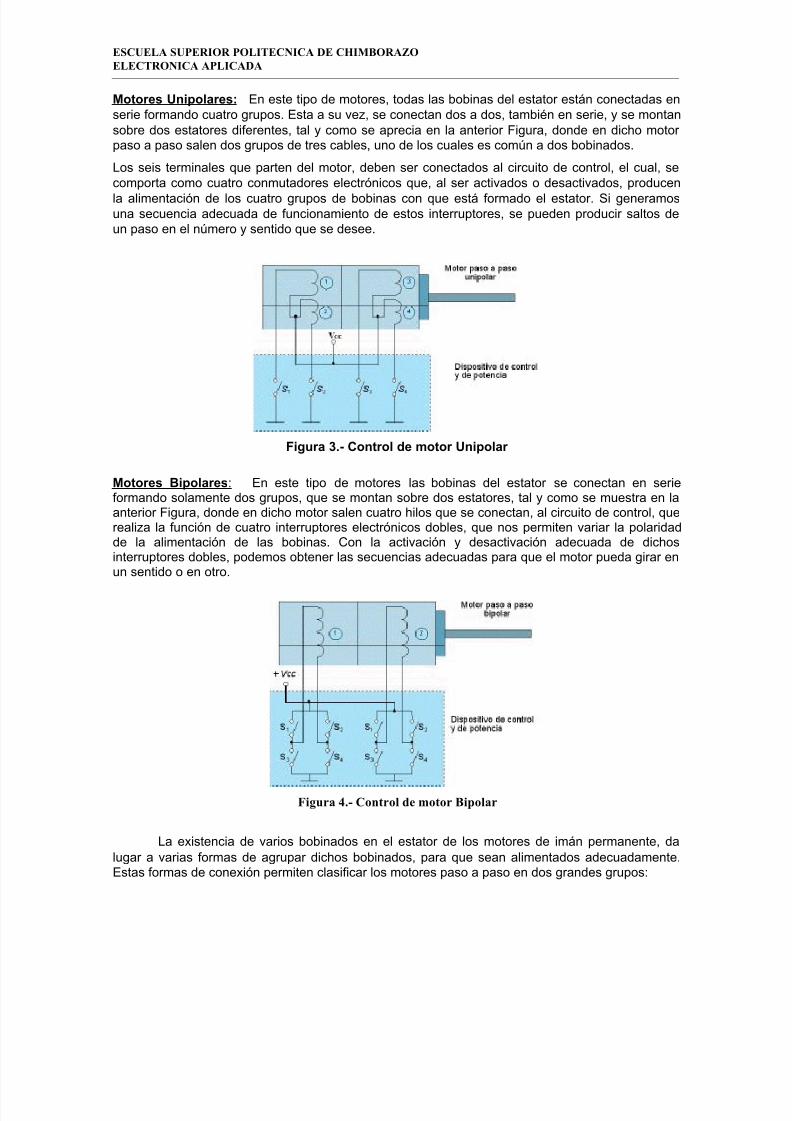
ELECTRONICA APLICADA Motores Unipolares: En este tipo de motores, todas las bobinas del estator están conectadas en
serie formando cuatro grupos. Esta a su vez, se conectan dos a dos, también en serie, y se montan
sobre dos estatores diferentes, tal y como se aprecia en la anterior Figura, donde en dicho motor paso a paso salen dos grupos de tres cables, uno de los cuales es común a dos bobinados.
Los seis terminales que parten del motor, deben ser conectados al circuito de control, el cual, se
comporta como cuatro conmutadores electrónicos que, al ser activados o desactivados, producen
la alimentación de los cuatro grupos de bobinas con que está formado el estator. Si generamosuna secuencia adecuada de funcionamiento de estos interruptores, se pueden producir saltos de
un paso en el número y sentido que se desee.
Figura 3.- Control de motor Unipolar
Motores Bipolares: En este tipo de motores las bobinas del estator se conectan en serieformando solamente dos grupos, que se montan sobre dos estatores, tal y como se muestra en laanterior Figura, donde en dicho motor salen cuatro hilos que se conectan, al circuito de control, querealiza la función de cuatro interruptores electrónicos dobles, que nos permiten variar la polaridadde la alimentación de las bobinas. Con la activación y desactivación adecuada de dichosinterruptores dobles, podemos obtener las secuencias adecuadas para que el motor pueda girar enun sentido o en otro.
Figura 4.- Control de motor Bipolar
La existencia de varios bobinados en el estator de los motores de imán permanente, da
lugar a varias formas de agrupar dichos bobinados, para que sean alimentados adecuadamente.Estas formas de conexión permiten clasificar los motores paso a paso en dos grandes grupos:
5/17/2018 Control Motor 16F84 - slidepdf.com
http://slidepdf.com/reader/full/control-motor-16f84 4/10
ESCUELA SUPERIOR POLITECNICA DE CHIMBORAZO
ELECTRONICA APLICADA
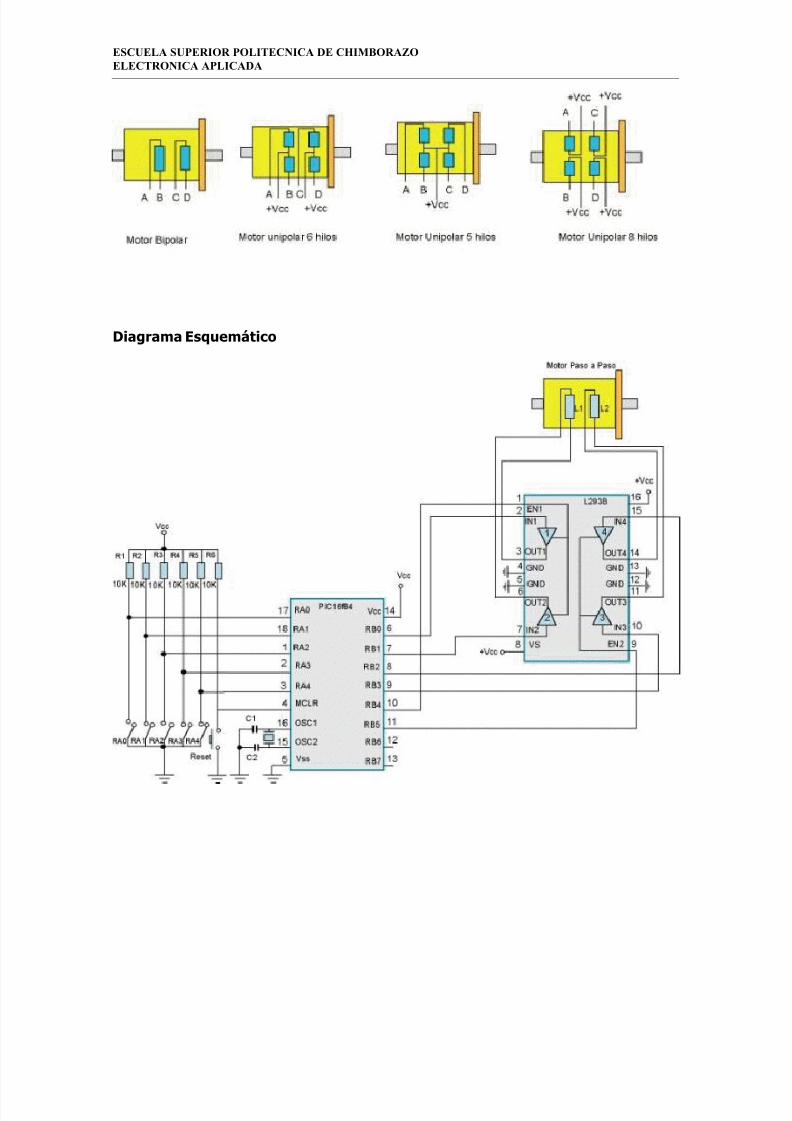
Diagrama Esquemático

5/17/2018 Control Motor 16F84 - slidepdf.com
http://slidepdf.com/reader/full/control-motor-16f84 5/10
ESCUELA SUPERIOR POLITECNICA DE CHIMBORAZO
ELECTRONICA APLICADA Diagrama de Flujo

5/17/2018 Control Motor 16F84 - slidepdf.com
http://slidepdf.com/reader/full/control-motor-16f84 6/10
ESCUELA SUPERIOR POLITECNICA DE CHIMBORAZO
ELECTRONICA APLICADA
Programa Principal
LIST P=16F84 ;Elección del modelo del PICINCLUDE "P16F84.INC" ;Definiciones de registros internosRADIX HEX ;Sistema de numeración hexadecimal.
TEMP1 EQU 0x0C ;Registros de propósito general.TEMP2 EQU 0x0D
ORG 0X00GOTO INICIOORG 0X05
;---------------------------------------------------------------------------------------------;PROGRAMA PRINCIPAL.
INICIO:BSF STATUS, RP0
MOVLW b'00011111' ;Se configura RA0 como entrada y el resto de laMOVWF TRISA ;PORTA también como entrada.CLRF TRISBBCF STATUS, RP0CLRF INTCON ;Se anulan las interrupciones.
INTERRUPBTFSS PORTA,2 ;Se averigua si el circuito esta ON/OFFGOTO BUCLE_1GOTO INTERRUP
BUCLE_1BTFSS PORTA,0 ;Se mira el estado del interruptor RA0 para girar
GOTO IZQUIERDA_1 ;el motor hacia la izquierda o hacia la derecha.GOTO DERECHA_1
;---------------------------------------------------------------------------------------------;IZQUIERDA_1 Y DERECHA_1: Son las encargan de dar al motor los pasoscorrespondientes;para que gire en un sentido en otro.
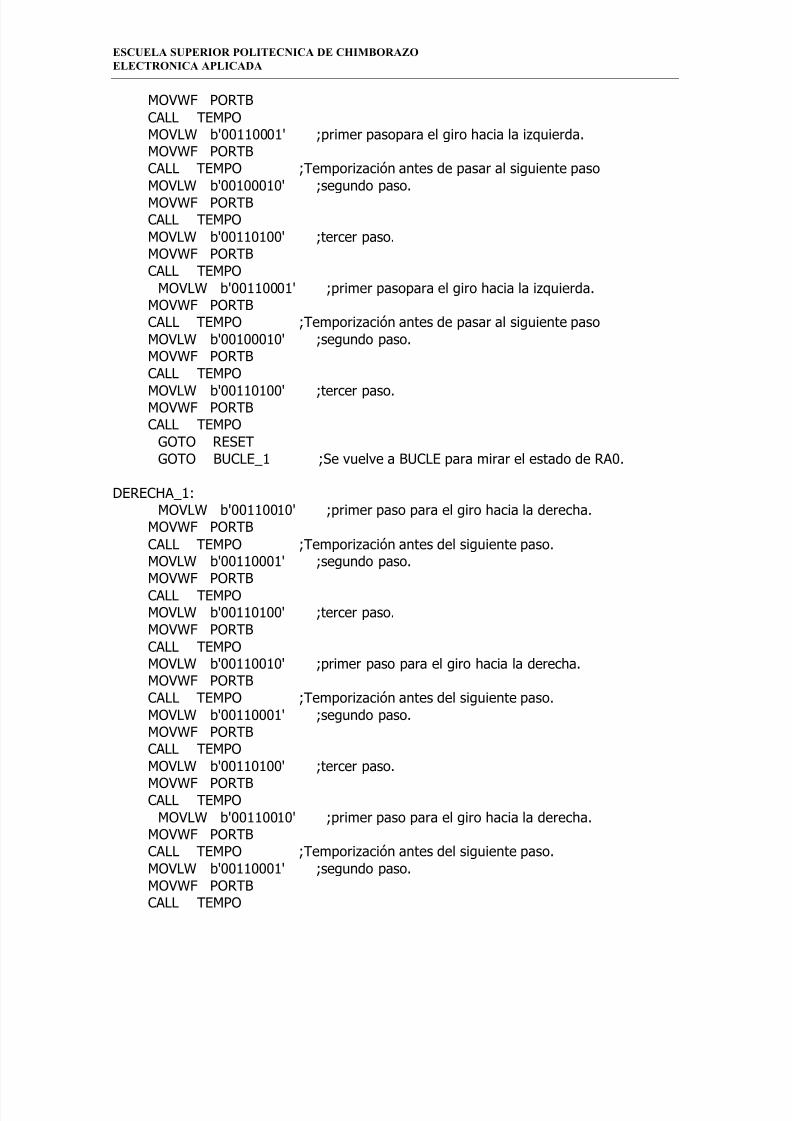
IZQUIERDA_1:MOVLW b'00110001' ;primer pasopara el giro hacia la izquierda.
MOVWF PORTBCALL TEMPO ;Temporización antes de pasar al siguiente pasoMOVLW b'00110010' ;segundo paso.MOVWF PORTBCALL TEMPOMOVLW b'00110100' ;tercer paso.
5/17/2018 Control Motor 16F84 - slidepdf.com
http://slidepdf.com/reader/full/control-motor-16f84 7/10
ESCUELA SUPERIOR POLITECNICA DE CHIMBORAZO
ELECTRONICA APLICADA MOVWF PORTBCALL TEMPOMOVLW b'00110001' ;primer pasopara el giro hacia la izquierda.MOVWF PORTBCALL TEMPO ;Temporización antes de pasar al siguiente pasoMOVLW b'00100010' ;segundo paso.MOVWF PORTBCALL TEMPOMOVLW b'00110100' ;tercer paso.MOVWF PORTBCALL TEMPO
MOVLW b'00110001' ;primer pasopara el giro hacia la izquierda.MOVWF PORTBCALL TEMPO ;Temporización antes de pasar al siguiente pasoMOVLW b'00100010' ;segundo paso.MOVWF PORTBCALL TEMPO
MOVLW b'00110100' ;tercer paso.MOVWF PORTBCALL TEMPO
GOTO RESETGOTO BUCLE_1 ;Se vuelve a BUCLE para mirar el estado de RA0.
DERECHA_1:MOVLW b'00110010' ;primer paso para el giro hacia la derecha.
MOVWF PORTBCALL TEMPO ;Temporización antes del siguiente paso.MOVLW b'00110001' ;segundo paso.MOVWF PORTBCALL TEMPOMOVLW b'00110100' ;tercer paso.MOVWF PORTBCALL TEMPOMOVLW b'00110010' ;primer paso para el giro hacia la derecha.MOVWF PORTBCALL TEMPO ;Temporización antes del siguiente paso.MOVLW b'00110001' ;segundo paso.MOVWF PORTBCALL TEMPOMOVLW b'00110100' ;tercer paso.
MOVWF PORTBCALL TEMPO
MOVLW b'00110010' ;primer paso para el giro hacia la derecha.MOVWF PORTBCALL TEMPO ;Temporización antes del siguiente paso.MOVLW b'00110001' ;segundo paso.MOVWF PORTBCALL TEMPO

5/17/2018 Control Motor 16F84 - slidepdf.com
http://slidepdf.com/reader/full/control-motor-16f84 8/10
ESCUELA SUPERIOR POLITECNICA DE CHIMBORAZO
ELECTRONICA APLICADA MOVLW b'00110100' ;tercer paso.MOVWF PORTBCALL TEMPO
GOTO RESETGOTO BUCLE_1 ;Se vuelve a BUCLE para mirar el estado RA0.
;---------------------------------------------------------------------------------------------;TEMPO Subrutina de temporización.
TEMPOMOVLW 0x0F ;carga 0F en TEMP1
MOVWF TEMP1CLRF TEMP2 ;Carga 0 en TEMP2
TEMPO_1DECFSZ TEMP2, F ;Decrementa TEMP2 y si es 0 salta
GOTO TEMPO_1 ;volver a TEMPO_1DECFSZ TEMP1, F ;Decrementa TEMP1 y si es 0 salta
GOTO TEMPO_1 ;volver a TEMPO_1RETURN
;---------------------------------------------------------------------------------------------;RESET Subrutina de reseteo
RESETBTFSC PORTA,4GOTO BUCLE_2GOTO RESET
BUCLE_2BTFSS PORTA,0 ;Se mira el estado del interruptor RA0 para girar
GOTO DERECHA_2 ;el motor hacia la deracha o hacia la izquierda.GOTO IZQUIERDA_2
RETURN
;---------------------------------------------------------------------------------------------;IZQUIERDA_2 Y DERECHA_2: Son las encargan de dar al motor los pasoscorrespondientes;para que gire en un sentido en otro.
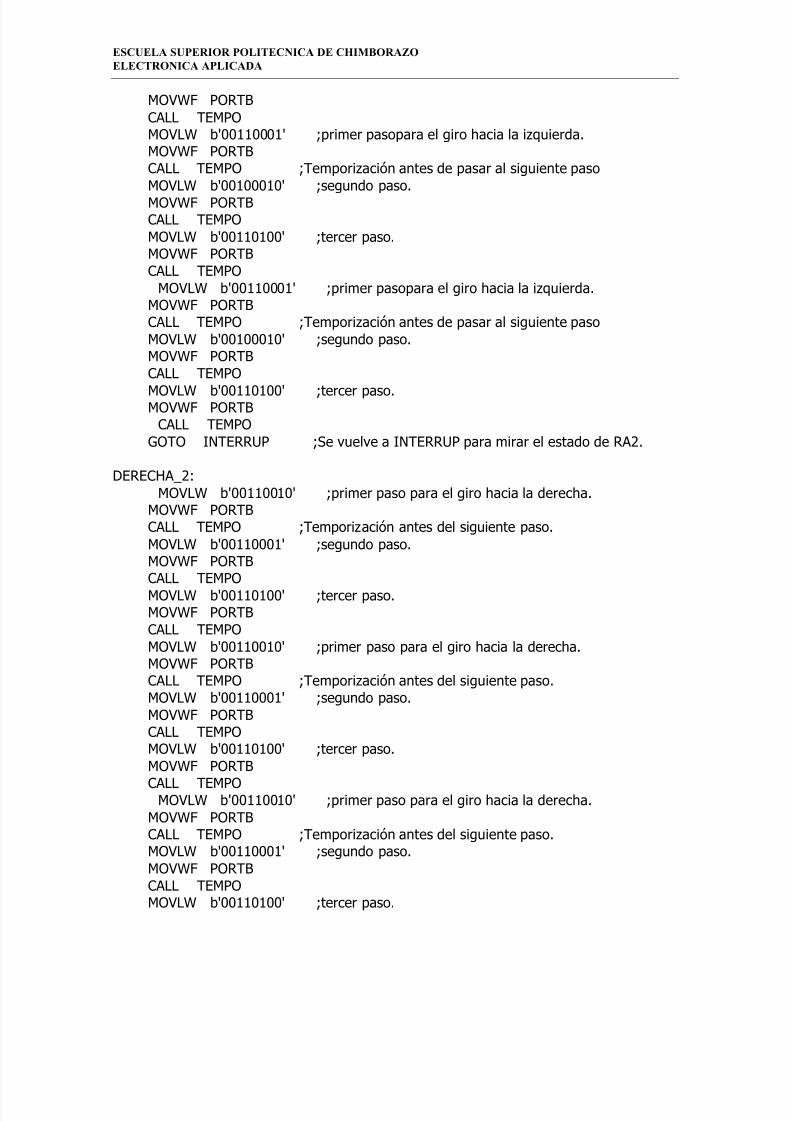
IZQUIERDA_2:MOVLW b'00110001' ;primer pasopara el giro hacia la izquierda.
MOVWF PORTBCALL TEMPO ;Temporización antes de pasar al siguiente pasoMOVLW b'00100010' ;segundo paso.MOVWF PORTBCALL TEMPOMOVLW b'00110100' ;tercer paso.
5/17/2018 Control Motor 16F84 - slidepdf.com
http://slidepdf.com/reader/full/control-motor-16f84 9/10
ESCUELA SUPERIOR POLITECNICA DE CHIMBORAZO
ELECTRONICA APLICADA MOVWF PORTBCALL TEMPOMOVLW b'00110001' ;primer pasopara el giro hacia la izquierda.MOVWF PORTBCALL TEMPO ;Temporización antes de pasar al siguiente pasoMOVLW b'00100010' ;segundo paso.MOVWF PORTBCALL TEMPOMOVLW b'00110100' ;tercer paso.MOVWF PORTBCALL TEMPO
MOVLW b'00110001' ;primer pasopara el giro hacia la izquierda.MOVWF PORTBCALL TEMPO ;Temporización antes de pasar al siguiente pasoMOVLW b'00100010' ;segundo paso.MOVWF PORTBCALL TEMPO
MOVLW b'00110100' ;tercer paso.MOVWF PORTB
CALL TEMPOGOTO INTERRUP ;Se vuelve a INTERRUP para mirar el estado de RA2.
DERECHA_2:MOVLW b'00110010' ;primer paso para el giro hacia la derecha.
MOVWF PORTBCALL TEMPO ;Temporización antes del siguiente paso.MOVLW b'00110001' ;segundo paso.MOVWF PORTBCALL TEMPOMOVLW b'00110100' ;tercer paso.MOVWF PORTBCALL TEMPOMOVLW b'00110010' ;primer paso para el giro hacia la derecha.MOVWF PORTBCALL TEMPO ;Temporización antes del siguiente paso.MOVLW b'00110001' ;segundo paso.MOVWF PORTBCALL TEMPOMOVLW b'00110100' ;tercer paso.MOVWF PORTB
CALL TEMPOMOVLW b'00110010' ;primer paso para el giro hacia la derecha.
MOVWF PORTBCALL TEMPO ;Temporización antes del siguiente paso.MOVLW b'00110001' ;segundo paso.MOVWF PORTBCALL TEMPOMOVLW b'00110100' ;tercer paso.
5/17/2018 Control Motor 16F84 - slidepdf.com
http://slidepdf.com/reader/full/control-motor-16f84 10/10
ESCUELA SUPERIOR POLITECNICA DE CHIMBORAZO
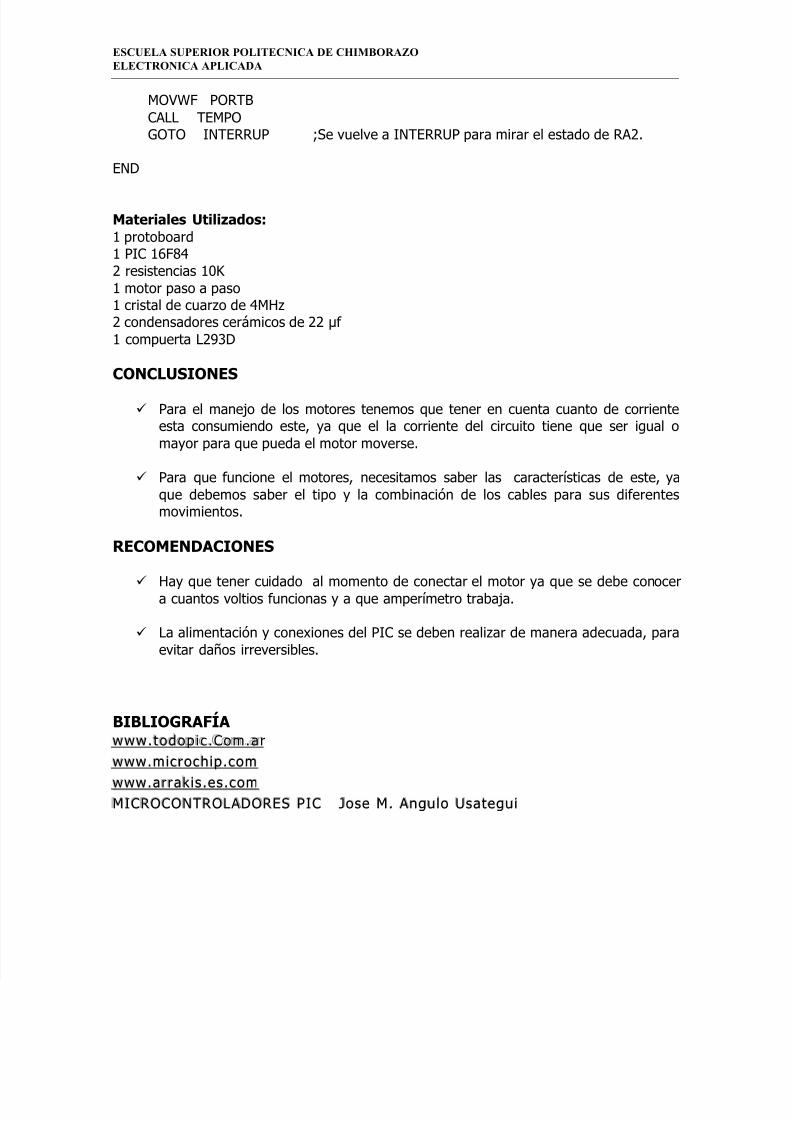
ELECTRONICA APLICADA MOVWF PORTBCALL TEMPOGOTO INTERRUP ;Se vuelve a INTERRUP para mirar el estado de RA2.
END
Materiales Utilizados:1 protoboard1 PIC 16F842 resistencias 10K 1 motor paso a paso1 cristal de cuarzo de 4MHz2 condensadores cerámicos de 22 µf 1 compuerta L293D
CONCLUSIONES
ü Para el manejo de los motores tenemos que tener en cuenta cuanto de corrienteesta consumiendo este, ya que el la corriente del circuito tiene que ser igual omayor para que pueda el motor moverse.
ü Para que funcione el motores, necesitamos saber las características de este, yaque debemos saber el tipo y la combinación de los cables para sus diferentesmovimientos.
RECOMENDACIONES
ü Hay que tener cuidado al momento de conectar el motor ya que se debe conocera cuantos voltios funcionas y a que amperímetro trabaja.
ü La alimentación y conexiones del PIC se deben realizar de manera adecuada, paraevitar daños irreversibles.
BIBLIOGRAFÍAwww.todopic.Com.ar
www.microchip.com
www.arrakis.es.comMICROCONTROLADORES PIC Jose M. Angulo Usategui