Embed Size (px)
Citation preview

Control of bilinear systems: multiple systems andperturbations
Gabriel Turinici
CEREMADE,Universite Paris Dauphine
ESF OPTPDE Workshop InterDyn2013, Modeling and Control ofLarge Interacting Dynamical Systems September 10-12, Paris, 2013
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 1 / 42

Motivation
Outline
1 MotivationMathematical questionsOptical and magnetic manipulation of quantum dynamics
2 ModelizationSingle quantum system: wavefunction formulationSeveral quantum systems: density matrix formulationSimultaneous control of quantum systemsEvolution semigroupObservables
3 ControllabilityBackground on controllability criteriaSimultaneous controllability of quantum systemsControllability of a set of identical moleculesControllability in presence of known perturbations
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 2 / 42

Motivation Mathematical questions
Simultaneous controllability
Isolated system: ddt x(t) = f (t, x(t), u(t)).
Collection of similar systems
d
dtxk(t) = fk(t, xk(t), u(t)), k = 1, ...,K . (1)
Similar may mean fk(t, x , u) = f (t, x , αku), αk ∈ R. The systemsdiffer in their interaction with the control e.g. for instance are placedspatially differently with respect to the controlling action.
Can one simultaneously control all systems with same u(t) ?
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 3 / 42

Motivation Mathematical questions
Controllability of “large perturbations”
Un-perturbed system: ddt x(t) = f (t, x(t), u(t)).
Perturbed system:
d
dtxk(t) = f (t, xk(t), u(t) + δuk(t)), k = 1, ...,K . (2)
Large perturbations: δuk(t), k = 1, ...,K in a fixed list (alphabet) butthere is no knowledge about which k will actually occur.
Can one still control the system ?
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 4 / 42

Motivation Optical and magnetic manipulation of quantum dynamics
Laser SELECTIVE control over quantum dynamics
Figure: Optimized laser pulses can be used to control molecular dynamics. a, An optimized laser pulse excites benzene intothe superposition state S0 + S1 with bidirectional electron motion that results in switching between two discrete Kekulestructures on a subfemtosecond timescale; b: A different optimized laser pulse excites benzene into the superposition state S0 +S2, which is triply ionic; c: The next frontier in simulating control is to excite both electronic and nuclear dynamicssimultaneously. Credits: NATURE CHEMISTRY, VOL 4, FEBRUARY 2012, p 72.
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 5 / 42

Motivation Optical and magnetic manipulation of quantum dynamics
Figure: Studying the excited states of proteins. F. Courvoisier et al., App.Phys.Lett.
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 6 / 42

Motivation Optical and magnetic manipulation of quantum dynamics
Quantum non-demolition measurements
Figure: Physics Nobel prize 2012 to Haroche and Wineland ”for ground-breaking experimental methods that enablemeasuring and manipulation of individual quantum systems. Serge Haroche and David Wineland have independently inventedand developed methods for measuring and manipulating individual particles while preserving their quantum-mechanical nature,in ways that were previously thought unattainable”; [these are ] ”the first tiny steps towards building a quantum computer”.Picture credits: Nature 492, 55 (06 December 2012)
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 7 / 42

Motivation Optical and magnetic manipulation of quantum dynamics
Other applications
• EMERGENT technology
• NMR: spin interacting with magnetic fields; control by magnetic fields
• creation of particular molecular states
• fast “switch” in semiconductors
• ...
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 8 / 42

Modelization
Outline
1 MotivationMathematical questionsOptical and magnetic manipulation of quantum dynamics
2 ModelizationSingle quantum system: wavefunction formulationSeveral quantum systems: density matrix formulationSimultaneous control of quantum systemsEvolution semigroupObservables
3 ControllabilityBackground on controllability criteriaSimultaneous controllability of quantum systemsControllability of a set of identical moleculesControllability in presence of known perturbations
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 9 / 42

Modelization Single quantum system: wavefunction formulation
Single quantum system
Time dependent Schrodinger equation{i ∂∂t Ψ(x , t) = H(t)Ψ(x , t)Ψ(x , t = 0) = Ψ0(x).
(3)
• H(t) = H0+ interaction terms E.g. H0 = −∆ + V (x)• H(t)∗ = H(t) thus ‖Ψ(t)‖L2 = 1, ∀t ≥ 0.• dipole approximation: H(t) = H0 − ε(t)µ(x)• E.g. O − H bond, H0 = − ∆
2m + V , m = reduced mass
V (x) = D0[e−β(x−x0) − 1]2 − D0, µ(x) = µ0xe−x/x∗
• higher order approximation: H(t) = H0 +∑
k εk(t)µk(x)
• misc. approximations (rigid rotor interacting with two-color linearlypolarized pulse): H(t) = H0 + (E1(t)2 + E2(t)2)µ1 + E1(t)2 · E2(t)µ2
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 10 / 42

Modelization Several quantum systems: density matrix formulation
Several quantum systems: density matrix formulation
• Evolution equation for a projector
Let Pψ(t) = Ψ(t)Ψ†(t) i.e. the projector on Ψ(t), also noted in bra-ketnotation |Ψ(t)〉〈Ψ(t)| ; then
i∂
∂tPψ(t) =
(i∂
∂tΨ(t)
)Ψ†(t) + Ψ(t)
(− i
∂
∂tΨ(t)
)†(4)(
H(t)Ψ(t))
Ψ†(t) + Ψ(t)(− H(t)Ψ(t)
)†= (5)
[H(t),Ψ(t)Ψ†(t)] = [H(t),Pψ(t)]. (6)
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 11 / 42

Modelization Several quantum systems: density matrix formulation
Several quantum systems: density matrix formulation
• For a sum of projectors (density matrix): ρ(t) =∑
k ηkPψk (t). Bylinearity the equation for the density matrix evolution{
i ∂∂t ρ(x , t) = [H(t), ρ(x , t)]ρ(x , t = 0) = ρ0(x).
(7)
Usually ηk ∈ R+ define a discrete probability law with ηk the probability tobe at t = 0 in state Ψk(0). This gives interpretation in terms ofobservables.
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 12 / 42

Modelization Simultaneous control of quantum systems
Simultaneous control of quantum systems
Under simultaneous control of a unique laser field L ≥ 2 molecular species.
Initial state |Ψ(0)〉 =∏L`=1 |Ψ`(0)〉.
Any molecule evolves by its own Schrodinger equationi~ ∂∂t |Ψ`(t)〉 = [H`
0 − µ` · ε(t)]|Ψ`(t)〉
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 13 / 42

Modelization Simultaneous control of quantum systems
A set of identical molecules with different spatial positions
N ≥ 2 identical molecules, DIFFERENT orientations, simultaneous controlby one laser field.Interaction with a field µε(t)αk where αk depends on R = (r , θ, ζ) whichcharacterizes the localization of the molecule in the ensemble.
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 14 / 42

Modelization Evolution semigroup
Evolution semigroup
{i ∂∂tU(t) = H(t)U(t)U(0) = Id .
(8)
Relationship with- wavefunction forumulation Ψ(t) = U(t)Ψ(0)- density matrix version: ρ(t) = U(t)ρ(0)U†(t)
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 15 / 42

Modelization Observables
Observables: localization
Measurable quantities: 〈Ψ(t),OΨ(t)〉 for self-adjoint operators O (rq:phase invariance).
For density matrix: ρ(t) =∑
k ηkPψk (t)∑k
ηk〈Ψk(t),OΨk(t)〉 = Tr(ρO). (9)
coherent with the probabilistic interpretation.Important example: O = (sum of) projection(s) to some (eigen)state.
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 16 / 42

Modelization Observables
Observables: localizatione.g. O-H bond : O(x) = γ0√
πe−γ
20 (x−x ′)2
Figure: Successful quantum control for the localization observable.Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 17 / 42

Controllability
Outline
1 MotivationMathematical questionsOptical and magnetic manipulation of quantum dynamics
2 ModelizationSingle quantum system: wavefunction formulationSeveral quantum systems: density matrix formulationSimultaneous control of quantum systemsEvolution semigroupObservables
3 ControllabilityBackground on controllability criteriaSimultaneous controllability of quantum systemsControllability of a set of identical moleculesControllability in presence of known perturbations
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 18 / 42

Controllability Background on controllability criteria
Single quantum system, bilinear control
Time dependent Schrodinger equation{i ∂∂t Ψ(x , t) = H0Ψ(x , t)Ψ(x , t = 0) = Ψ0(x).
(10)
Add external BILINEAR interaction (e.g. laser){i ∂∂t Ψ(x , t) = (H0 − ε(t)µ(x))Ψ(x , t)Ψ(x , t = 0) = Ψ0(x)
(11)
Ex.: H0 = −∆ + V (x), unbounded domainEvolution on the unit sphere: ‖Ψ(t)‖L2 = 1, ∀t ≥ 0.
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 19 / 42

Controllability Background on controllability criteria
Controllability
A system is controllable if for two arbitrary points Ψ1 and Ψ2 on the unitsphere (or other ensemble of admissible states) it can be steered from Ψ1
to Ψ2 with an admissible control.
Norm conservation : controllability is equivalent, up to a phase, to saythat the projection to a target is = 1.
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 20 / 42

Controllability Background on controllability criteria
Galerkin discretization of the Time Dependent Schrodingerequation
i∂
∂tΨ(x , t) = (H0 − ε(t)µ)Ψ(x , t)
• basis functions {ψi ; i = 1, ...,N}, e.g. the eigenfunctions of the H0:H0ψk = ekψk
• wavefunction written as Ψ =∑N
k=1 ckψk
• We will still denote by H0 and µ the matrices (N × N) associated to theoperators H0 and µ : H0kl = 〈ψk |H0|ψl〉, µkl = 〈ψk |µ|ψl〉,
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 21 / 42

Controllability Background on controllability criteria
Lie algebra approaches
To assess controllability of
i∂
∂tΨ(x , t) = (H0 − ε(t)µ)Ψ(x , t)
construct the “dynamic” Lie algebra L = Lie(−iH0,−iµ):{∀M1,M2 ∈ L, ∀α, β ∈ IR : αM1 + βM2 ∈ L∀M1,M2 ∈ L, [M1,M2] = M1M2 −M2M1 ∈ L
Theorem If the group eL is compact any eMψ0, M ∈ L can be attained.“Proof” M = −iAt : trivial by free evolutionTrotter formula:
e i(AB−BA) = limn→∞
[e−iB/
√ne−iA/
√ne iB/
√ne iA/
√n]n
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 22 / 42

Controllability Background on controllability criteria
Operator synthesis ( “lateral parking”)
Trotter formula: e i [A,B] = limn→∞
[e−iB/
√ne−iA/
√ne iB/
√ne iA/
√n]n
e±iA = advance/reverse ; e±iB = turn left/right
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 23 / 42

Controllability Background on controllability criteria
Corollary. If L = u(N) or L = su(N) (the (null-traced) skew-hermitianmatrices) then the system is controllable.“Proof” For any Ψ0, ΨT there exists a “rotation” U in U(N) = eu(N) (orin SU(N) = esu(N)) such that ΨT = UΨ0.• (Albertini & D’Alessandro 2001) Controllability also true for Lisomorphic to sp(N/2) (unicity).sp(N/2) = {M : M∗ + M = 0,M tJ + JM = 0} where J is a matrix unitary
equivalent to
(0 IN/2
−IN/2 0
)and IN/2 is the identity matrix of dimension N/2
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 24 / 42

Controllability Background on controllability criteria
Results by the connectivity graph (G.T. & H. Rabitz)
Let us define the connectivity graph
G = (V ,E ),V = {ψ1, ..., ψN};E = {(ψi , ψj), i 6= j ,Bij 6= 0}
A =
1.0 0 0 0 00 1.2 0 0 00 0 1.3 0 00 0 0 2.0 00 0 0 0 2.15
,B =
0 0 0 ∗ ∗0 0 0 ∗ ∗0 0 0 ∗ ∗∗ ∗ ∗ 0 0∗ ∗ ∗ 0 0
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 25 / 42

Controllability Background on controllability criteria
Look for degenerate transitions : list all ekl = ek − el and look forrepetitions.
A =
1.0 0 0 0 00 1.2 0 0 00 0 1.3 0 00 0 0 2.0 00 0 0 0 2.15
,B =
0 0 0 ∗ ∗0 0 0 ∗ ∗0 0 0 ∗ ∗∗ ∗ ∗ 0 0∗ ∗ ∗ 0 0
e41 = 2.0− 1.0 = 1.0, e51 = 2.15− 1.0 = 1.15e42 = 2.0− 1.2 = 0.8, e52 = 2.15− 1.2 = 0.95e43 = 2.0− 1.3 = 0.7, e53 = 2.15− 1.3 = 0.85
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 26 / 42

Controllability Background on controllability criteria
Theorem (G.T. & H.Rabitz 2000, C.Altafini 2001) If the connectivitygraph is connected and if there are no degenerate transitions then thesystem is controllable.
Note: non connected = independent quantum systems.
A =
1.0 0 0 0 00 1.2 0 0 00 0 1.3 0 00 0 0 2.0 00 0 0 0 2.15
,B =
0 0 0 1 10 0 0 1 10 0 0 1 11 1 1 0 01 1 1 0 0
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 27 / 42

Controllability Simultaneous controllability of quantum systems
Simultaneous controllability of quantum systems
Under simultaneous control of a unique laser field L ≥ 2 molecular species.
Initial state |Ψ(0)〉 =∏L`=1 |Ψ`(0)〉.
Total controllability = can simultaneously and arbitrarily steer any state|Ψ`(0)〉 → |Ψ`(t)〉, t ≥ 0 under the influence of only one laser field ε(t).
Any molecule evolves by its own Schrodinger equationi~ ∂∂t |Ψ`(t)〉 = [H`
0 − µ` · ε(t)]|Ψ`(t)〉
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 28 / 42

Controllability Simultaneous controllability of quantum systems
Discretization spaces D` = {ψ`i (x); i = 1, ..,N`}, N`,N` ≥ 3 eigenstates ofH`
0
A` and B` = matrices of the operators H`0 and µ` respectively, with
respect to D`; N =∑L
`=1 N`,
A =
A1 0 . . . 00 A2 . . . 0...
.... . .
...0 0 . . . AL
, B =
B1 0 . . . 00 B2 . . . 0...
.... . .
...0 0 . . . BL
.
Note: the system evolves on the product of spheres S =∏L`=1 S
N`−1C ,
Sk−1C = complex unit sphere of Ck .
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 29 / 42

Controllability Simultaneous controllability of quantum systems
Theorem (B. Li, G. T., V. Ramakhrishna, H. Rabitz. 2002, 2003) : If
dimRLie(−iA,−iB) = 1 +L∑`=1
(N2` − 1),
then the system is controllable (the dimension of Lie(−iA,−iB) iscomputed over R). Moreover, if the system is controllable, there exists atime T > 0 such that any target can be reached at or before time T (andthereafter for all t > T ), i.e. for any c0 ∈ S et t ≥ T the set of reachablestates from c0 is S.
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 30 / 42

Controllability Controllability of a set of identical molecules
Controllability of a set of identical molecules
N ≥ 2 identical molecules, placed under simultaneous control of only onelaser field. The molecules have DIFFERENT orientations.
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 31 / 42

Controllability Controllability of a set of identical molecules
Controllability of a set of identical molecules
Linear case:
d
dtx1 = Ax1 + Bu(t), x1(0) = 0 (12)
d
dtx2 = Ax2 + 2Bu(t), x2(0) = 0. (13)
(14)
Then for any control u(t) we have x2(t) = 2x1(t), thus there arerestrictions on the attainable set; no simultaneous control in the linearcase.
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 32 / 42

Controllability Controllability of a set of identical molecules
Controllability of a set of identical molecules
Interaction with the control field is µε(t)αk where αk depends on thelocalization R = (r , θ, ζ) of the molecule in the ensemble.
Theorem (GT & H. Rabitz, PRA 2004): Suppose |αk | 6= |αj |, H0 is withnon-degenerate transitions and graph of µ is connected. Then if one(arbitrary) molecule is controllable then the whole (discrete) ensemble is.
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 33 / 42

Controllability Controllability of a set of identical molecules
Controllability of a set of identical molecules
Interaction with the control field is µε(t)αk where αk depends on thelocalization R = (r , θ, ζ) of the molecule in the ensemble.
Theorem (GT & H. Rabitz, PRA 2004): Suppose H0 is withnon-degenerate transitions and that the connectivity graph of the systemis connected but not bi-partite. Then if a molecule is controllable then thewhole (discrete) ensemble is.
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 34 / 42

Controllability Controllability of a set of identical molecules
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
P(x
)
x=1 single moleculefull ensemble
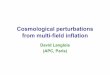
Figure: The target yield P(x) for different orientations of x = cos(θ). The yield P(x) from a field optimized at x = 1produced the quality control index Q(ε) = 49%. The yield P(x) for full ensemble control of was required to optimize a sampleof M = 31 orientations uniformly distributed over the interval [−1, 1]. The resultant quality index is Q(ε) = 85% (G.T. andH. Rabitz. PRA 2004
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 35 / 42

Controllability Controllability of a set of identical molecules
Other results from the literature:
• control of PDE: T. Chambrion, K. Beauchard, P. Rouchon: mostly forA + αku(t)B; recent works by M. Morancey, V. Nersesyan
• finite-dimensional, mostly for spin systems: C. Altafini, N. Khaneja:αkA + u(t)B
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 36 / 42

Controllability Controllability in presence of known perturbations
Controllability in presence of known perturbations: jointwork with M. Belhadj, J. Salomon, C. Lefter, B. Gavrilei
d
dtx = (A + u(t)B)x . (15)
What if u(t) is submitted to a random perturbation in a predefined(discrete) list {δuk , k = 1, ...,K} ?Linear systems:
d
dtx1 = Ax1 + Bu(t), x1(0) = 0. (16)
d
dtx2 = Ax2 + B[u(t) + α], x2(0) = 0. (17)
The dynamics of x2(t)− x1(t) is not influenced by the control:
d
dt(x2 − x1) = A(x2 − x1) + Bα, x2(0)− x1(0) = 0. (18)
Thus: no control of perturbations in the linear case.Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 37 / 42

Controllability Controllability in presence of known perturbations
Controllability in presence of known perturbations: jointwork with M. Belhadj, J. Salomon, C. Lefter, B. Gavrilei
Theorem (M. Belhadj, J. Salomon, GT 2013)
Suppose the bi-linear system on SU(N)
d
dtx = (A + u(t)B)x (19)
is such that the Lie algebra generated by [A,B] and B is the whole Liealgebra su(N). Then for any distinct αk ∈ R, k = 1, ..,K, the collection ofsystems
d
dtxk = (A + [u(t) + αk ]B)x , k = 1, ...,K , (20)
is controllable.
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 38 / 42

Controllability Controllability in presence of known perturbations
Controllability in presence of known perturbations: jointwork with M. Belhadj, J. Salomon, C. Lefter, B. Gavrilei
Theorem (M. Belhadj, J. Salomon, GT 2013)
Consider the collection of control systems on SU(N):dYk (t)
dt ={A + (u(t) + δku(t))B
}Yk(t),
Yk(0) = Yk,0 ∈ SU(N).
(21)
Suppose that there exists 0 < t1 < t2 <∞ such that δku(t) = αk
(constant) ∀t ∈ [t1, t2]. Then there exists TA,B,α1,··· ,αKsuch that if
t2 − t1 ≥ TA,B,α1,··· ,αKthe collection of systems (21) is simultaneously
controllable at any time T ≥ t2.
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 39 / 42

Controllability Controllability in presence of known perturbations
Controllability in presence of known perturbations: jointwork with M. Belhadj, J. Salomon, C. Lefter, B. Gavrilei
Different model:dZk (t)dt = AZk(t) + [u(t) + αk ]ξ(t)BZk(t),
Zk(0) = Zk,0 ∈ SU(N),
(22)
Controls : u(t), ξ(t) with ξ(t) ∈ {0, 1}, ∀t ≥ 0 (t 7→ ξ(t) measurable).
Theorem
The system (22) is simultaneously controllable if and only if LA,B = su(N).
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 40 / 42

Controllability Controllability in presence of known perturbations
Controllability in presence of known perturbations:extensions and perspectives
• slowly varying perturbations, (beyond piecewise constant )
• control of more non-linear situations:Rigid rotor interacting with linearly polarized pulse:
i∂
∂tΨ(x , t) =
[H0 + u(t)µ1 + u(t)2µ2 + u(t)3µ3
]Ψ(x , t). (23)
Rigid rotor interacting with two-color linearly polarized pulse:
i∂
∂tΨ(x , t) =
[H0 + (E1(t)2 + E2(t)2)µ1 + E1(t)2 · E2(t)µ2
]Ψ(x , t).
(24)
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 41 / 42

Controllability Controllability in presence of known perturbations
Controllability in presence of known perturbations:extensions and perspectives
• control of rotational motion: time dependent Schrodinger equation(θ, φ = polar coordinates):
i~∂
∂t|ψ(θ, φ, t)〉 = (BJ2 −
−−→u(t) ·
−→d )|ψ(θ, φ, t)〉 (25)
|ψ(0)〉 = |ψ0〉, (26)
• numerics (joint works with M. Belhadj, J. Salomon, C. Lefter, B.Gavrilei) : several approaches : monotonic algorithms, Lyapunovapproaches, multi-criterion optimization. In general it is difficult to findthe field robust to control.
Gabriel Turinici (U Paris Dauphine) Multiple and perturbed bi-linear control InterDyn2013, Paris 42 / 42





![Small Random Perturbations of Dynamical Systems and …ruelle/PUBLICATIONS/[65].pdf · Small Random Perturbations of Dynamical Systems and the Definition of Attractors David Ruelle](https://img.pdfslide.net/doc/110x75/5a9e3b927f8b9aee4a8ba77f/small-random-perturbations-of-dynamical-systems-and-ruellepublications65pdfsmall.jpg)






















