Embed Size (px)
Citation preview
Control SystemsChibum Lee -Seoultech
Outline
Concept of Root Locus
Constructing root locus
Control SystemsChibum Lee -Seoultech
Root Locus
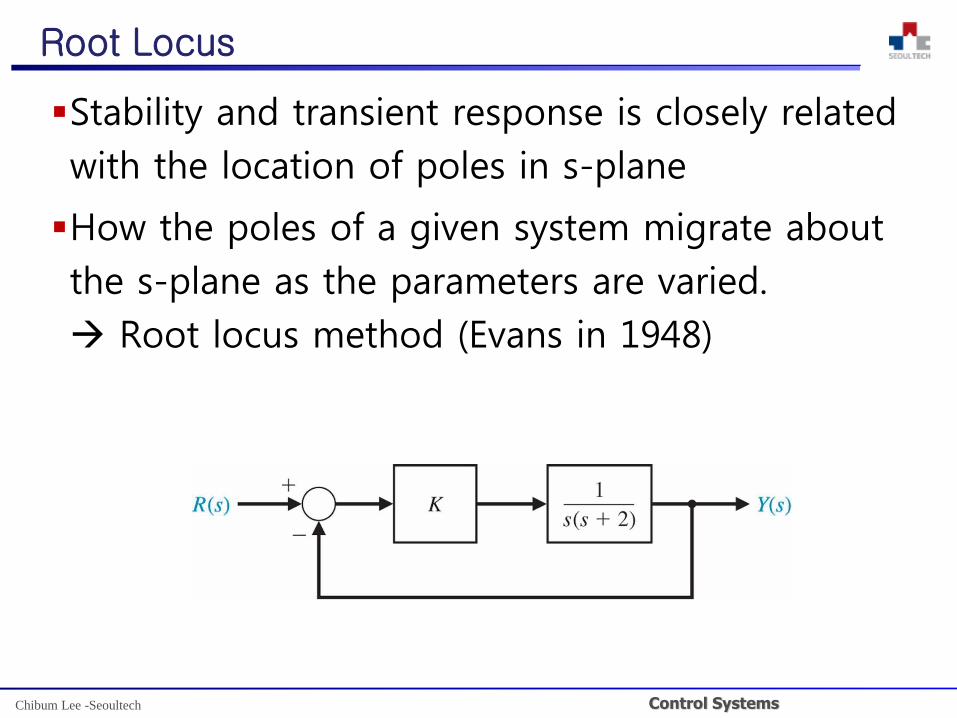
Stability and transient response is closely related
with the location of poles in s-plane
How the poles of a given system migrate about
the s-plane as the parameters are varied.
Root locus method (Evans in 1948)
Control SystemsChibum Lee -Seoultech
Example
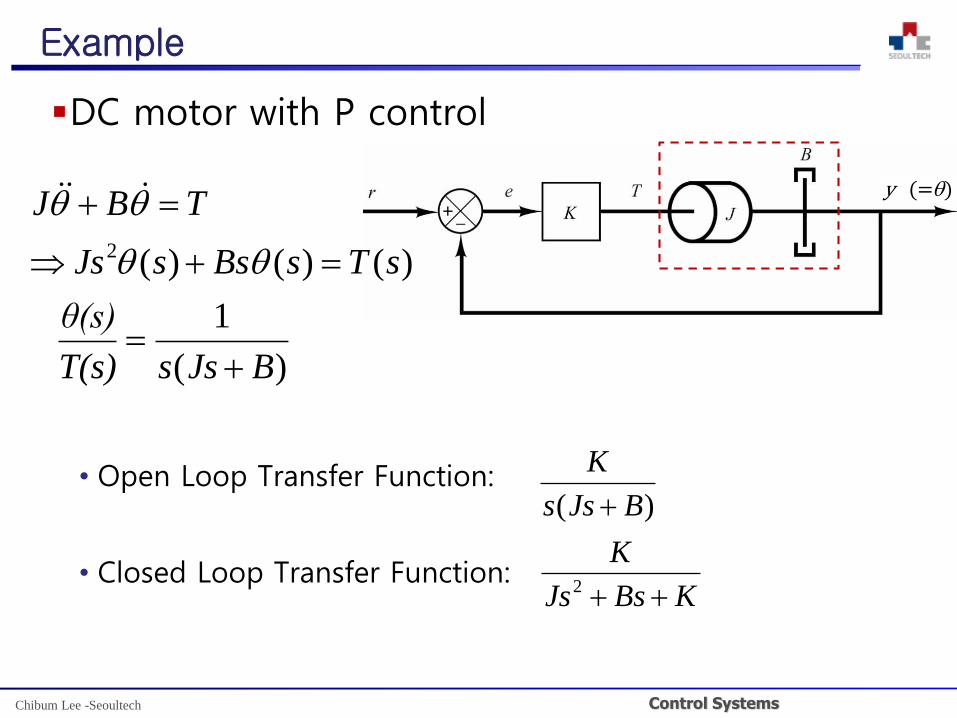
DC motor with P control
• Open Loop Transfer Function:
• Closed Loop Transfer Function:
)(
1
)()()(
2
BJssT(s)
θ(s)
sTsBssJs
TBJ
y (=)
KBsJs
K
2
)( BJss
K
Control SystemsChibum Lee -Seoultech
Example
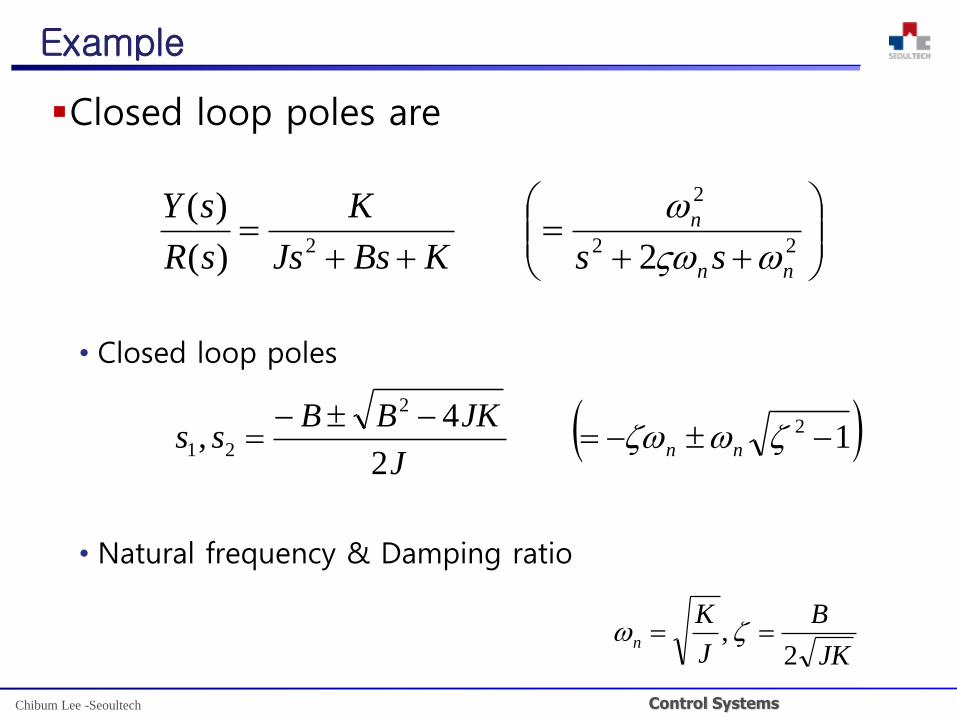
Closed loop poles are
• Closed loop poles
• Natural frequency & Damping ratio
JK
B
J
Kn
2,
22
2
2 2)(
)(
nn
n
ssKBsJs
K
sR
sY
12
4, 2
2
21
nnJ
JKBBss
Control SystemsChibum Lee -Seoultech
Example
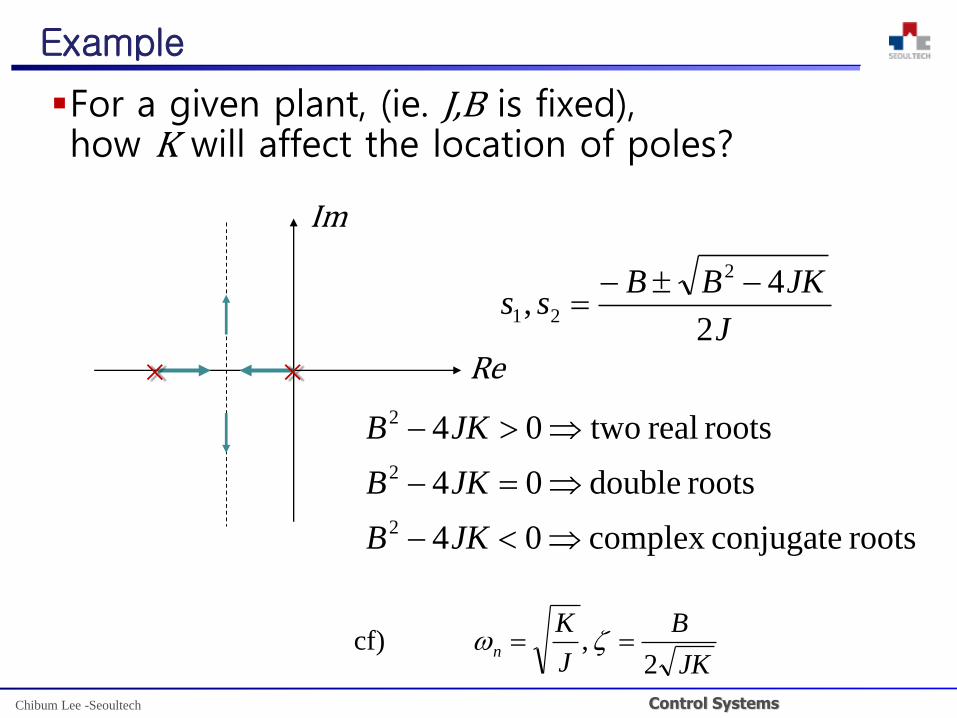
For a given plant, (ie. J,B is fixed), how K will affect the location of poles?
Re
Im
roots conjugatecomplex 04
roots double04
roots real two04
2
4,
2
2
2
2
21
JKB
JKB
JKB
J
JKBBss
JK
B
J
Kn
2, cf)

Control SystemsChibum Lee -Seoultech
Root Locus
Path of poles traced out in s-plane
as a system parameter varies from 0 to
• Characteristic equation is
• Closed loop poles satisfies
)(1
)()(
sKG
sKGsT
plane)-s(in 1)( sKG
0)(1)( sKGs
)12()(
1)(
ksKG
sKG
Control SystemsChibum Lee -Seoultech
Root Locus
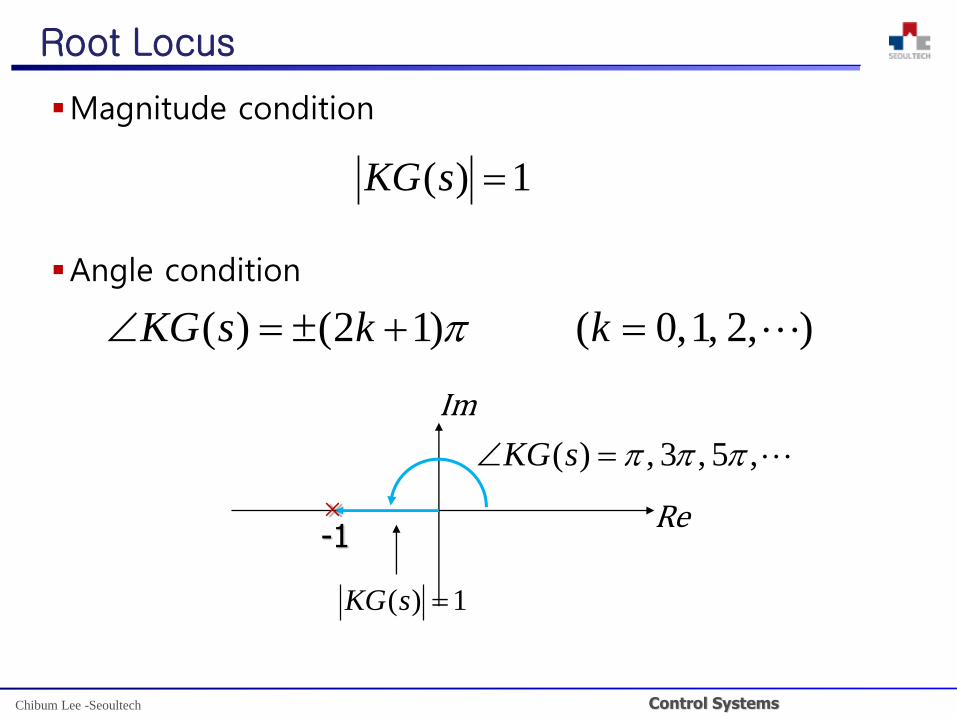
Magnitude condition
Angle condition
),2 ,1 ,0( )12()( kksKG
1)( sKG
Re
Im
,5 ,3 ,)( sKG
-1
1)( sKG

Control SystemsChibum Lee -Seoultech
Recall Complex Functions
Control SystemsChibum Lee -Seoultech
Example
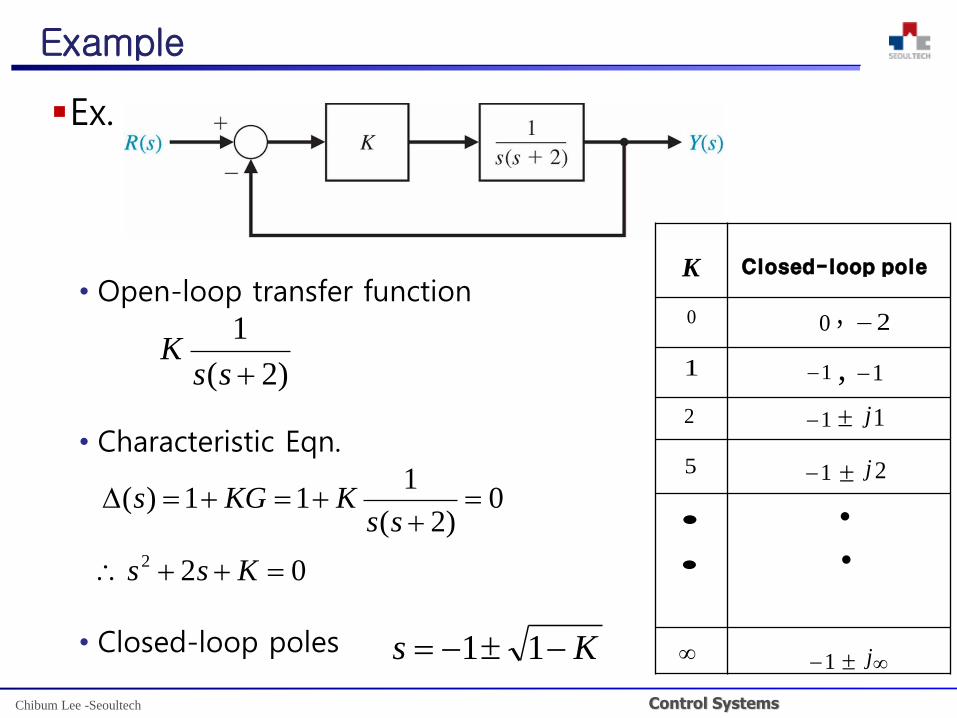
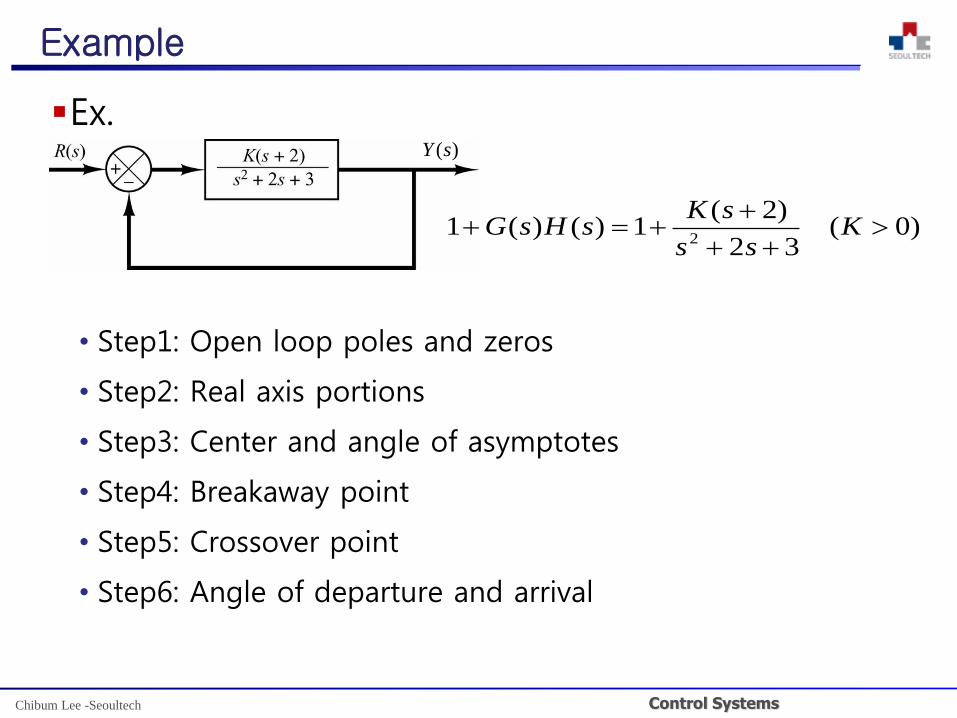
Ex.
• Open-loop transfer function
• Characteristic Eqn.
• Closed-loop poles
02
0)2(
111)(
2
Kss
ssKKGs
)2(
1
ssK
Closed-loop pole
0
1
2
5
0 2
,
1
,
1
1
1
j
1
1
2j
j
K
Ks 11
Control SystemsChibum Lee -Seoultech
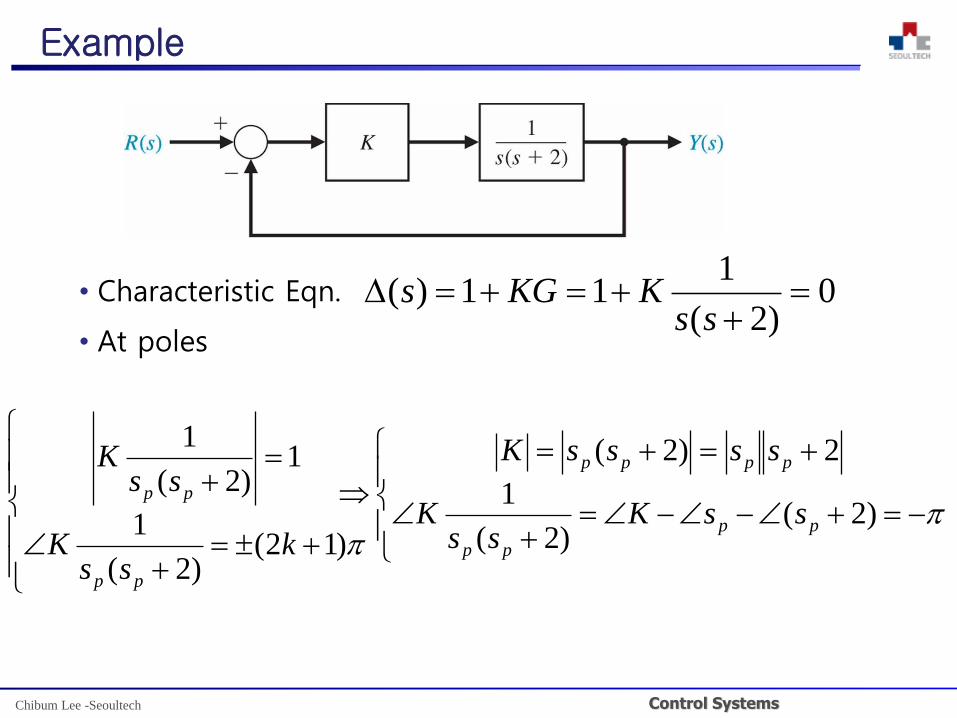
Example
• Characteristic Eqn.
• At poles
0)2(
111)(
ssKKGs
)12()2(
1
1)2(
1
kss
K
ssK
pp
pp
)2(
)2(
1
2)2(
pp
pp
pppp
ssKss
K
ssssK
Control SystemsChibum Lee -Seoultech
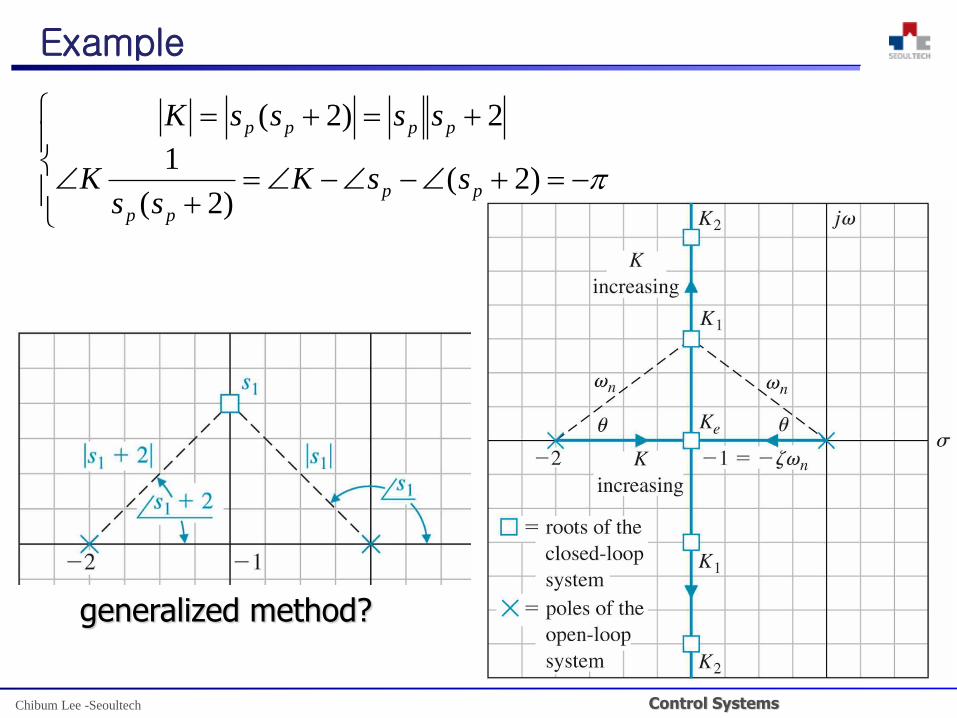
Example
)2()2(
1
2)2(
pp
pp
pppp
ssKss
K
ssssK
generalized method?
Control SystemsChibum Lee -Seoultech
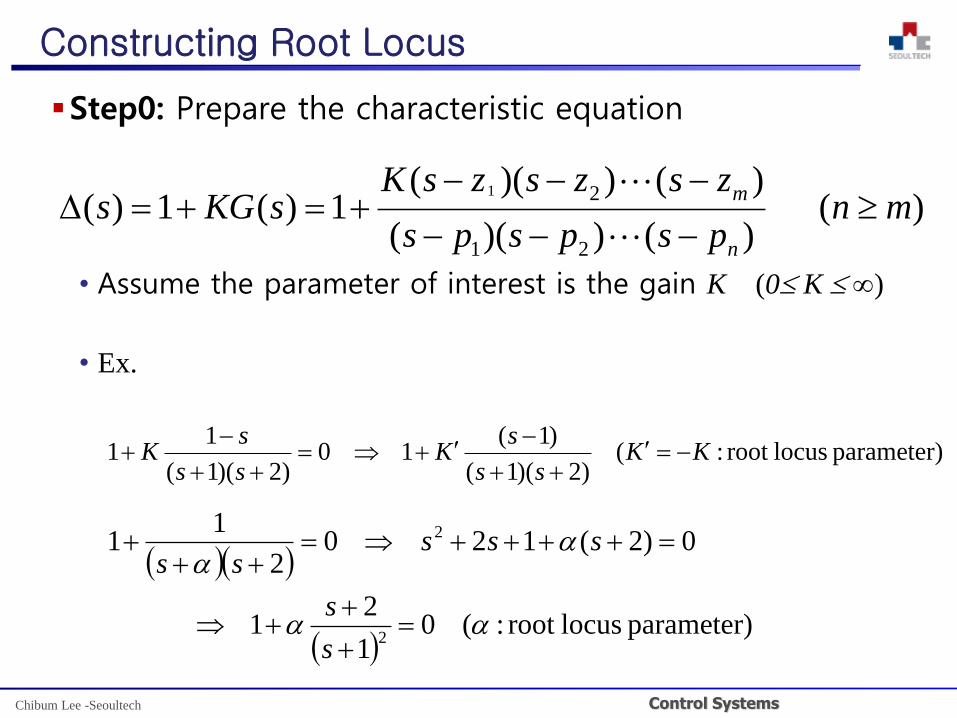
Constructing Root Locus
Step0: Prepare the characteristic equation
• Assume the parameter of interest is the gain K (0 K )
• Ex.
)( )())((
)())((1)(1)(
21
21
mnpspsps
zszszsKsKGs
n
m
parameter) locusroot :(0
1
21
0)2(1202
11
2
2
s
s
sssss
parameter) locusroot :()2)(1(
)1(10
)2)(1(
11 KK
ss
sK
ss
sK
Control SystemsChibum Lee -Seoultech
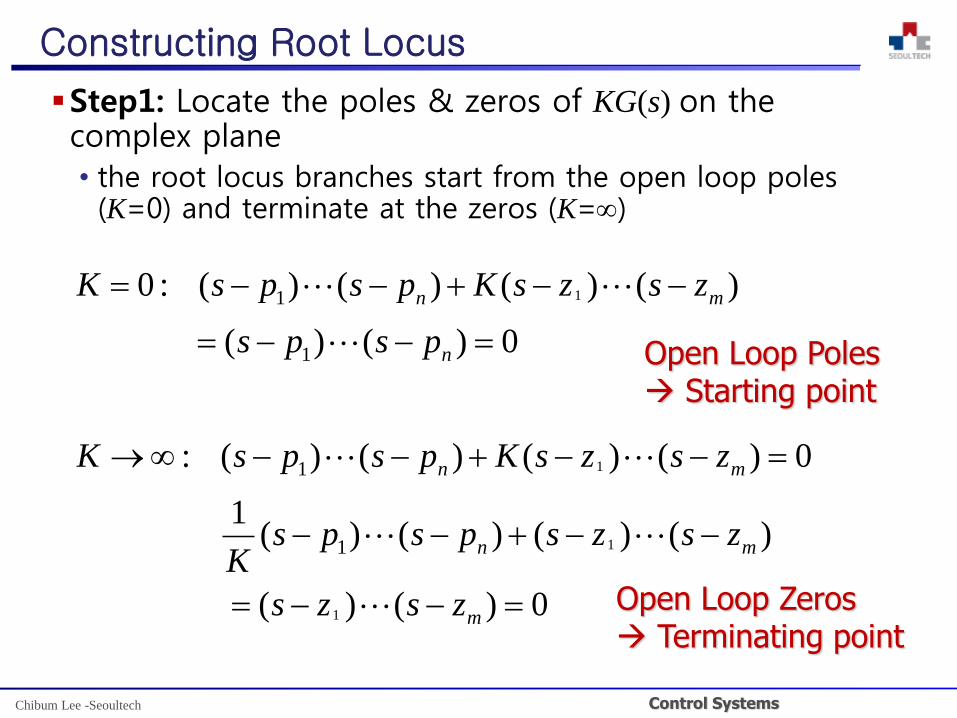
Constructing Root Locus
Step1: Locate the poles & zeros of KG(s) on the complex plane
• the root locus branches start from the open loop poles (K=0) and terminate at the zeros (K=)
0)()(
)()()()(:0
1
1 1
n
mn
psps
zszsKpspsK
Open Loop Poles Starting point
Open Loop Zeros Terminating point
0)()(
)()()()(1
0)()()()(:
1
1
1
1
1
m
mn
mn
zszs
zszspspsK
zszsKpspsK
Control SystemsChibum Lee -Seoultech
Constructing Root Locus
• # of separate loci = # of OL poles
• Starting point of root loci (K=0) Open loop poles (n)
• Terminating point of root loci (K=)
Finite zeros (m) : Open loop zeros
Infinite zeros (n-m)

Control SystemsChibum Lee -Seoultech
Constructing Root Locus
Step2: Locate the segments of the real axis that are root loci
• The root locus on the real axis always lies in a section of the real axis to the left of an odd number of poles and zeros. (K>0)
• Root loci must be symmetrical with respect to the real axis.
Control SystemsChibum Lee -Seoultech
Example
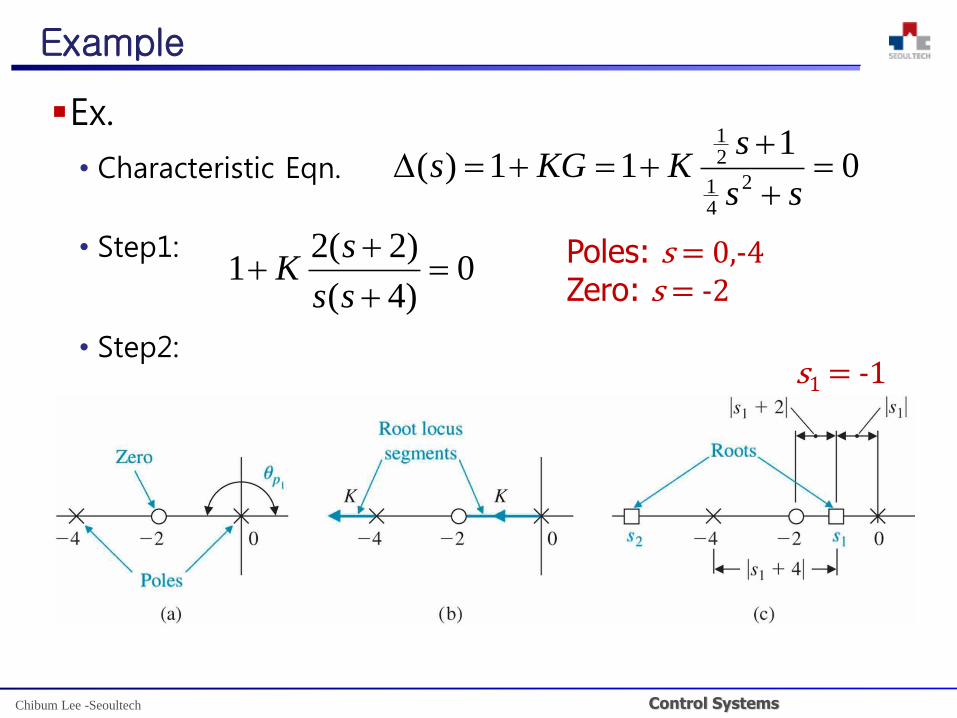
Ex.
• Characteristic Eqn.
• Step1:
• Step2:
01
11)(2
41
21
ss
sKKGs
0)4(
)2(21
ss
sK
Poles: s = 0,-4Zero: s = -2
s1 = -1
Control SystemsChibum Lee -Seoultech
Constructing Root Locus
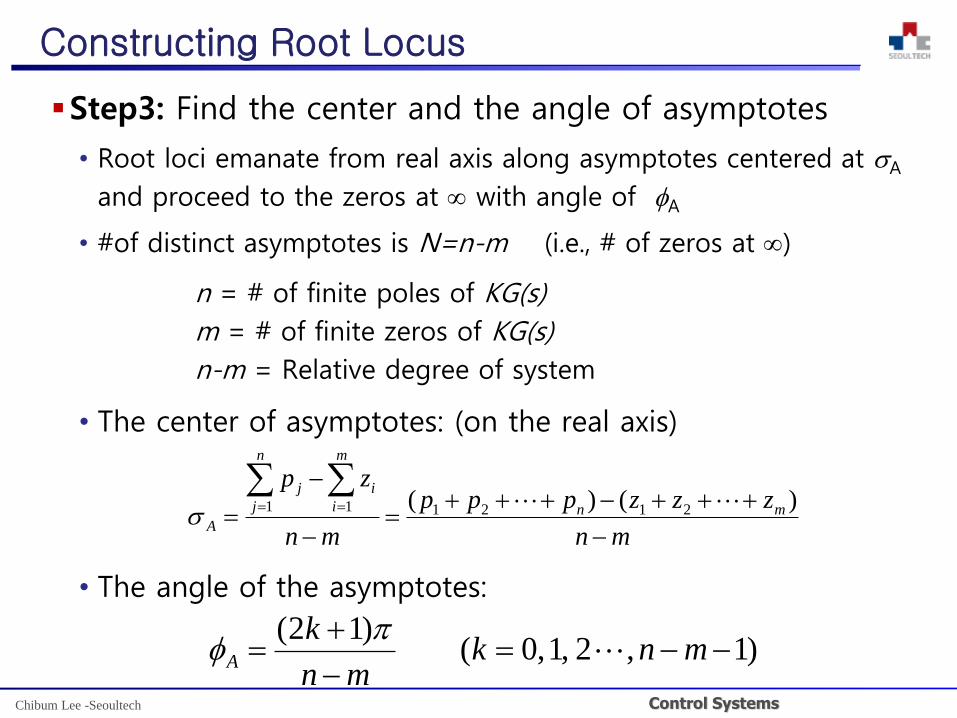
Step3: Find the center and the angle of asymptotes
• Root loci emanate from real axis along asymptotes centered at A
and proceed to the zeros at with angle of A
• #of distinct asymptotes is N=n-m (i.e., # of zeros at )
n = # of finite poles of KG(s)
m = # of finite zeros of KG(s)
n-m = Relative degree of system
• The center of asymptotes: (on the real axis)
• The angle of the asymptotes:
mn
zzzppp
mn
zpmn
m
i
i
n
j
j
A
)()(
212111
)1,2 ,1 ,0()12(
mnk
mn
kA

Control SystemsChibum Lee -Seoultech
Example
Ex.
open-loop poles: 0,-2,-4,-4
open-loop zeros: -1
n=4, m=1
• Center of asymptotes:
2)4)(2(
)1(1)(1
sss
sKsGH
314
)1()4(2)2(
A
Control SystemsChibum Lee -Seoultech
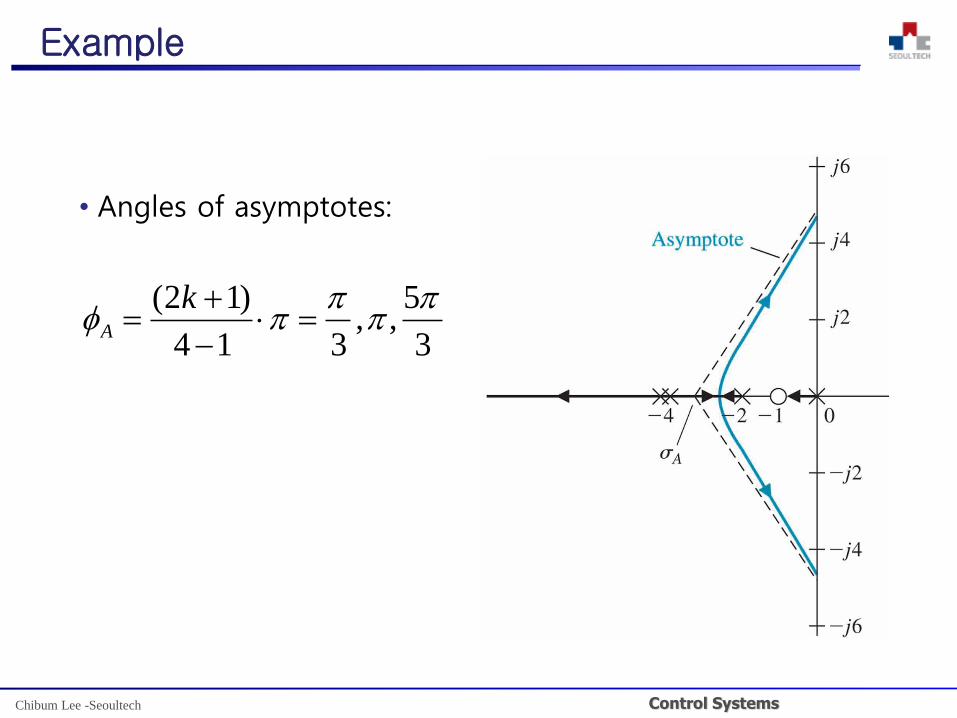
Example
3
5,,
314
)12(
kA
• Angles of asymptotes:
Control SystemsChibum Lee -Seoultech
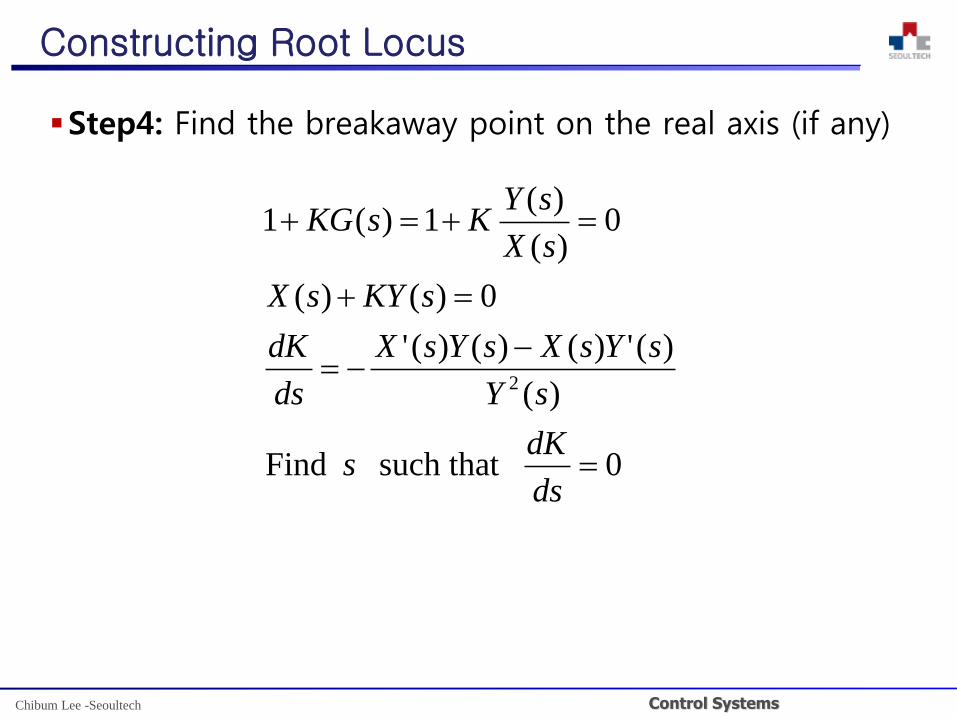
Step4: Find the breakaway point on the real axis (if any)
Constructing Root Locus
0 such that Find
)(
)(')()()('
0)()(
0)(
)(1)(1
2
ds
dKs
sY
sYsXsYsX
ds
dK
sKYsX
sX
sYKsKG
Control SystemsChibum Lee -Seoultech
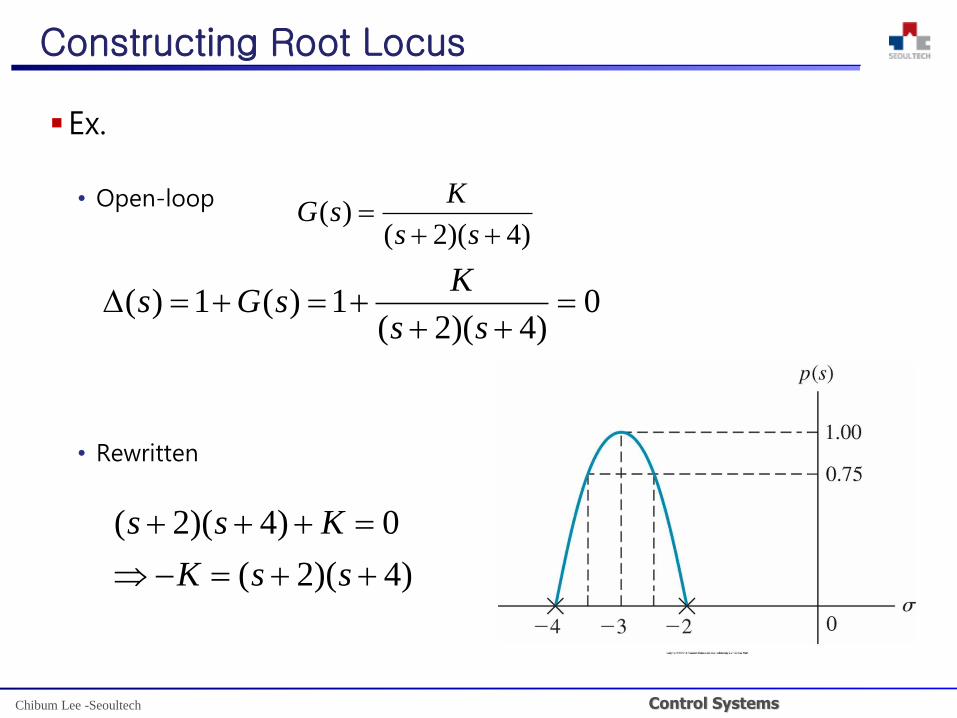
Ex.
• Open-loop
• Rewritten
Constructing Root Locus
0)4)(2(
1)(1)(
ss
KsGs
)4)(2()(
ss
KsG
)4)(2(
0)4)(2(
ssK
Kss
Control SystemsChibum Lee -Seoultech
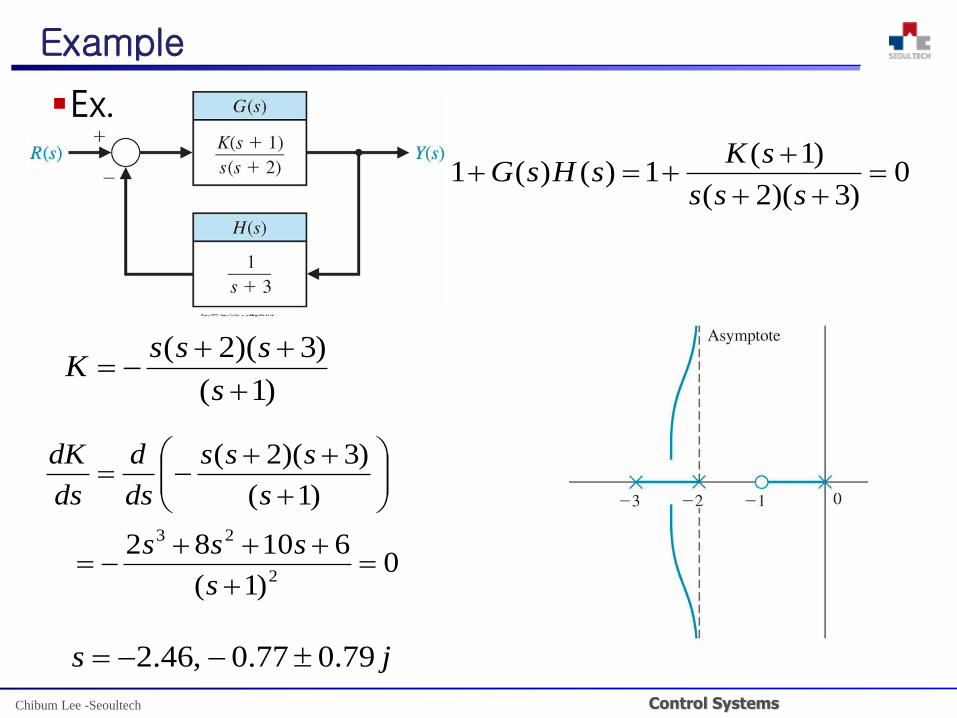
Example
Ex.
0)3)(2(
)1(1)()(1
sss
sKsHsG
)1(
)3)(2(
s
sssK
0)1(
61082
)1(
)3)(2(
2
23
s
sss
s
sss
ds
d
ds
dK
js 79.077.0,46.2
Control SystemsChibum Lee -Seoultech
Step5: Find the crossover point where the locus cross the
imaginary axis
• Routh-Hurwitz criterion
• Let 𝑠 = 𝑗𝜔 in Δ 𝑠
Constructing Root Locus
Control SystemsChibum Lee -Seoultech
Example
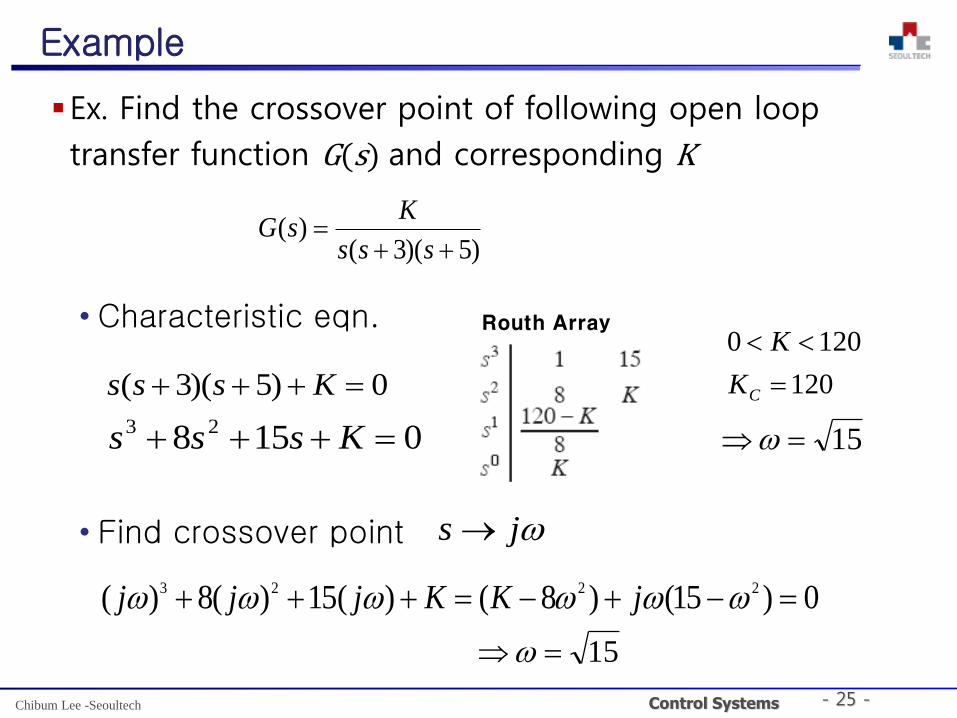
Ex. Find the crossover point of following open loop
transfer function G(s) and corresponding K
• Characteristic eqn.
• Find crossover point
- 25 -
)5)(3()(
sss
KsG
0)5)(3( Ksss
0158 23 Ksss
js
0)15()8()(15)(8)( 2223 jKKjjj
120
1200
CK
K
15
Routh Array
15
Control SystemsChibum Lee -Seoultech
Constructing Root Locus
Step6: Find the departure angle (@ poles) and
the arrival angle (@ zeros)
• Angle of departure from a complex pole pj
D = π - angles of vectors to pj from other poles
+ angles of vectors to pj from zeros
• Angle of arrival at a complex zero zi
A = π - angles of vectors to zi from other zeros
+ angles of vectors to zi from poles
• Only need to deal with finite zeros
( the zeros will be taken care of by asymptotes)
),2 ,1 ,0( )12()( kksKG
Control SystemsChibum Lee -Seoultech
Constructing Root Locus
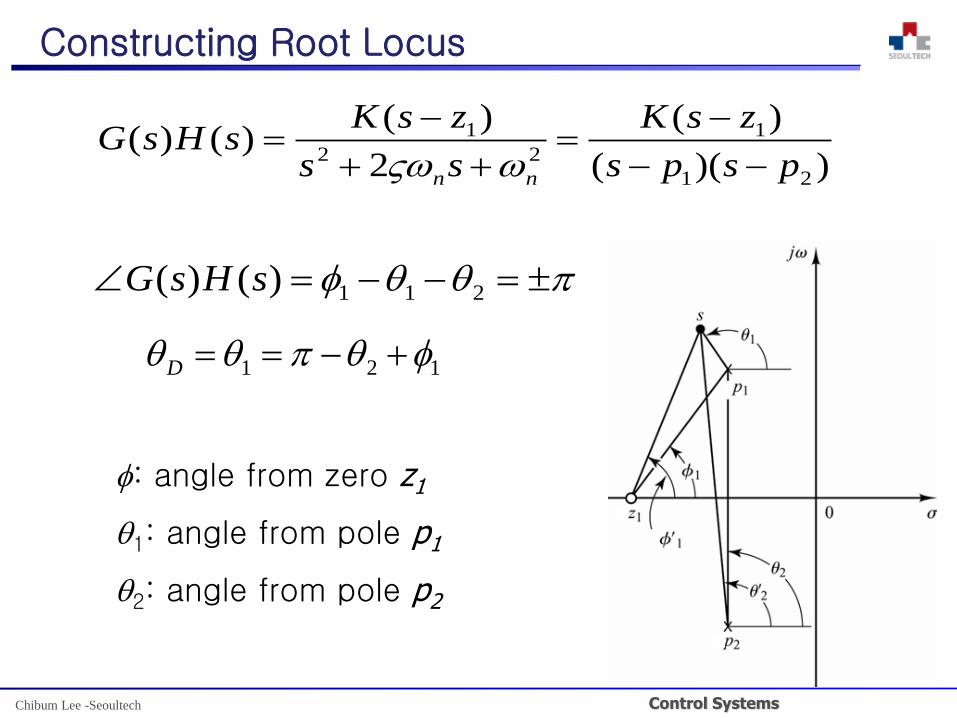
211)()( sHsG
: angle from zero z1
1: angle from pole p1
2: angle from pole p2
121 D
))((
)(
2
)()()(
21
1
22
1
psps
zsK
ss
zsKsHsG
nn

Control SystemsChibum Lee -Seoultech
Ex.
Example
)1)(1(
)2()()(
jsjs
sKsHsG
o
ooo
D j
135
4590180)1(
2- @ zerofrom angle
j-1- @ polefrom angle
135o
90o
45o
-2
j
-j
Control SystemsChibum Lee -Seoultech
Example
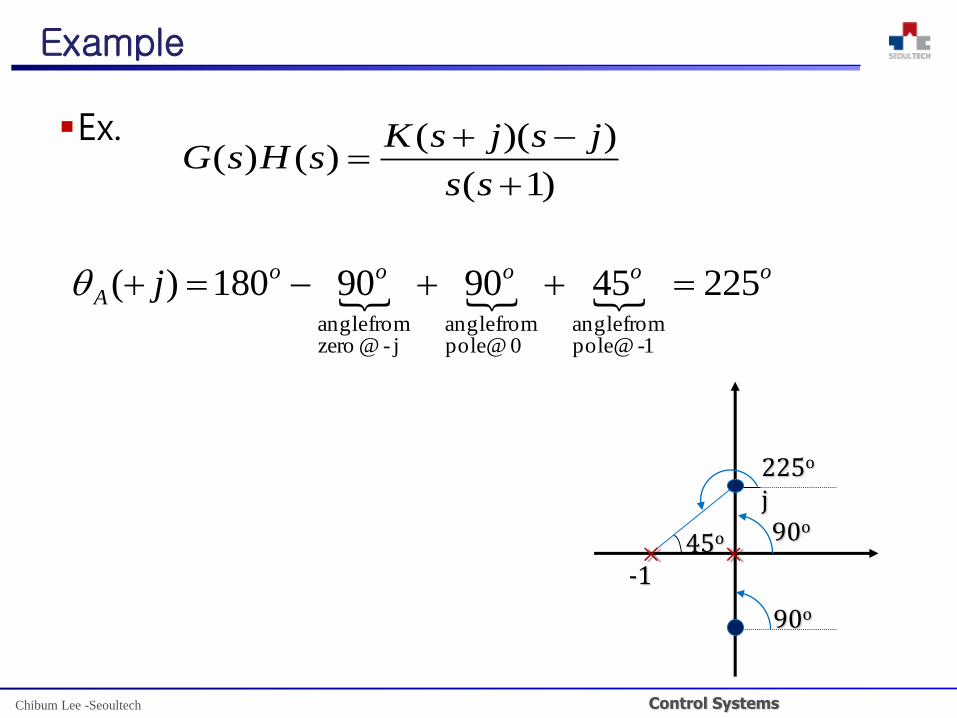
Ex.
)1(
))(()()(
ss
jsjsKsHsG
ooooo
A j 225459090180)(
1- @ polefrom angle
0 @ polefrom angle
j- @ zerofrom angle
90o
45o
-1
j225o
90o
Control SystemsChibum Lee -Seoultech
Constructing Root Locus
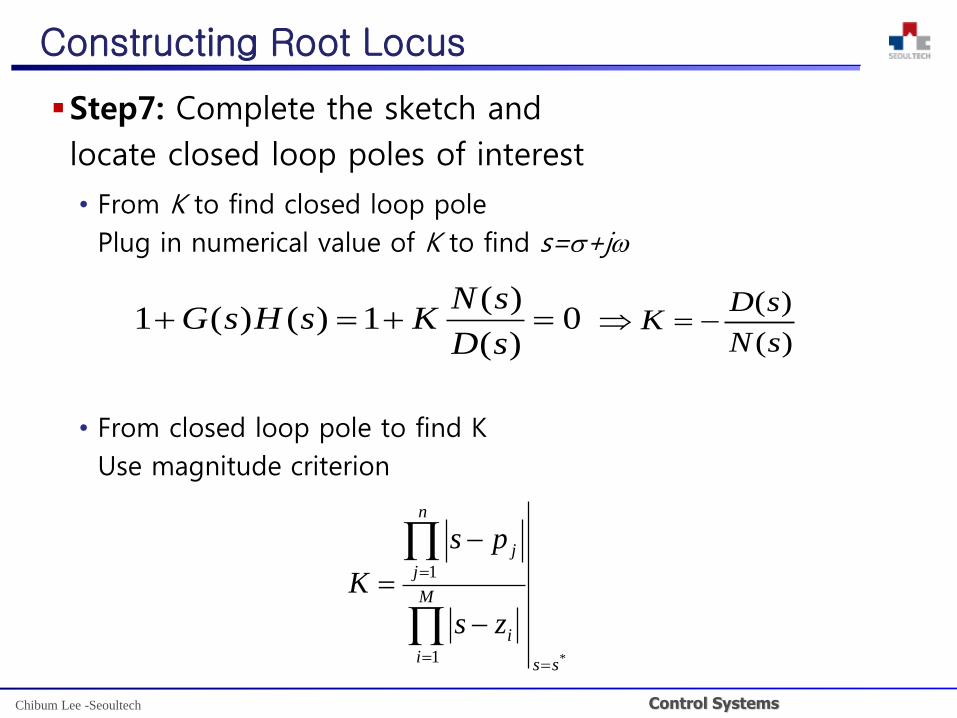
Step7: Complete the sketch and
locate closed loop poles of interest
• From K to find closed loop pole
Plug in numerical value of K to find s=+j
• From closed loop pole to find K
Use magnitude criterion
*1
1
ss
M
i
i
n
j
j
zs
ps
K
0)(
)(1)()(1
sD
sNKsHsG
( )
( )
D sK
N s

Control SystemsChibum Lee -Seoultech
Constructing Root Locus
MATLAB command
• rlocfind
• rlocus
• rltool

Control SystemsChibum Lee -Seoultech
Rules for Constructing Root Locus
Note: If the numerator and the denominator of the
open-loop transfer function have common factors, they
will cancel each other.
• Pole-zero cancellation.
The root locus plot of G(s)H(s) will then not show all
the roots of the characteristic equation.
• Only those that haven’t been cancelled are shown.
Control SystemsChibum Lee -Seoultech
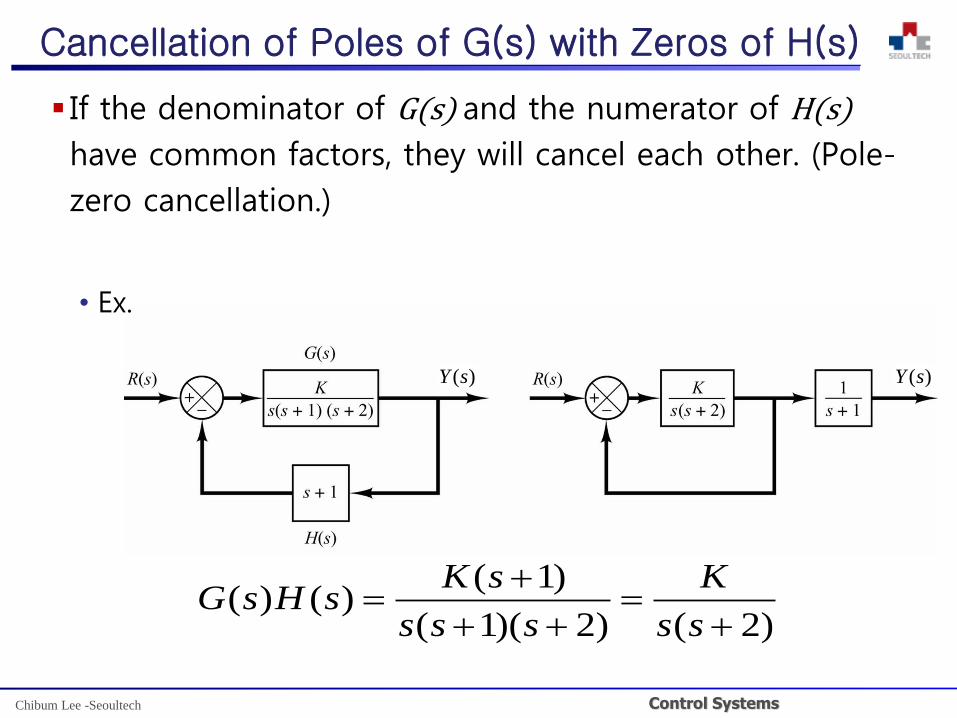
)2()2)(1(
)1()()(
ss
K
sss
sKsHsG
Cancellation of Poles of G(s) with Zeros of H(s)
If the denominator of G(s) and the numerator of H(s)
have common factors, they will cancel each other. (Pole-
zero cancellation.)
• Ex.
)(sY )(sY
Control SystemsChibum Lee -Seoultech
Outline
Root locus examples

Control SystemsChibum Lee -Seoultech
Example
Ex
• Step1: Open loop poles: 0,0,-2
Open loop zeros: -1
• Step2: Real axis portions (0,0), (-1,-2)
)0()2(
)1(1)()(1
2
K
ss
sKsHsG
Control SystemsChibum Lee -Seoultech
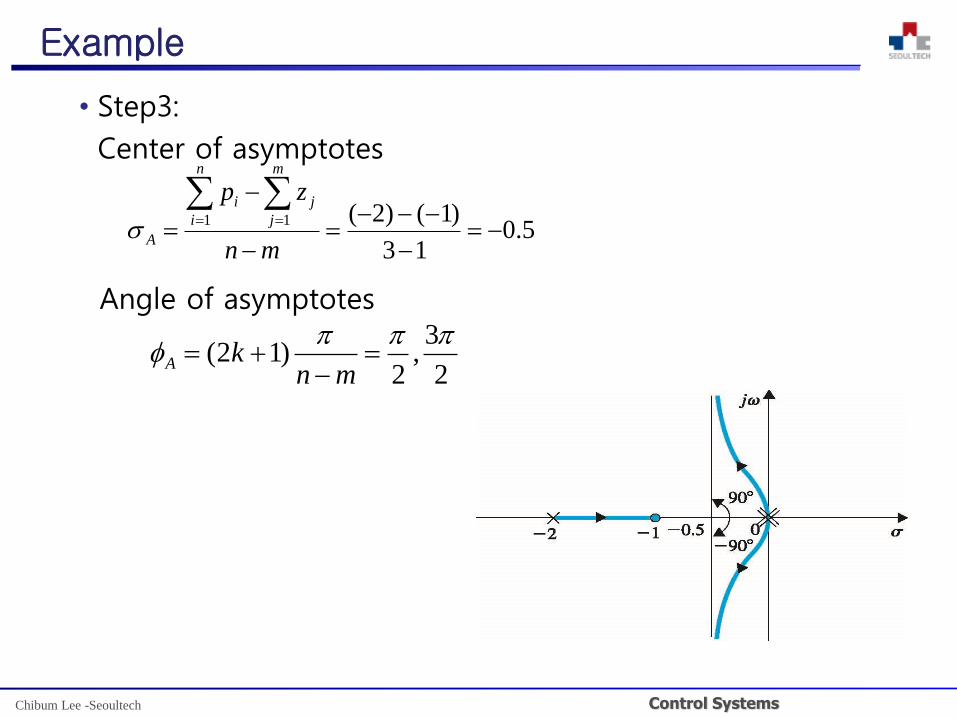
Example
• Step3:
Center of asymptotes
Angle of asymptotes
5.013
)1()2(11
mn
zpm
j
j
n
i
i
A
2
3,
2)12(
mnkA
Control SystemsChibum Lee -Seoultech
Example
Ex.
• Step1: Open loop poles and zeros
• Step2: Real axis portions
• Step3: Center and angle of asymptotes
• Step4: Breakaway point
• Step5: Crossover point
• Step6: Angle of departure and arrival
)0(32
)2(1)()(1
2
K
ss
sKsHsG
)(sY

Control SystemsChibum Lee -Seoultech
Example
Control SystemsChibum Lee -Seoultech
Example
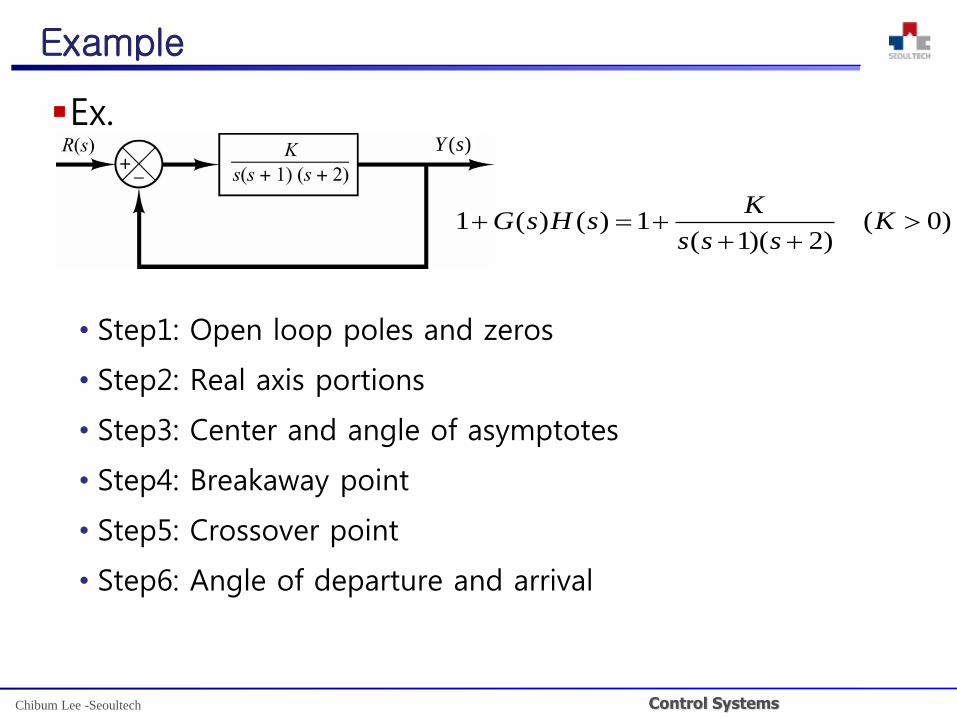
Ex.
• Step1: Open loop poles and zeros
• Step2: Real axis portions
• Step3: Center and angle of asymptotes
• Step4: Breakaway point
• Step5: Crossover point
• Step6: Angle of departure and arrival
)0()2)(1(
1)()(1
Ksss
KsHsG
)(sY

Control SystemsChibum Lee -Seoultech
Control SystemsChibum Lee -Seoultech
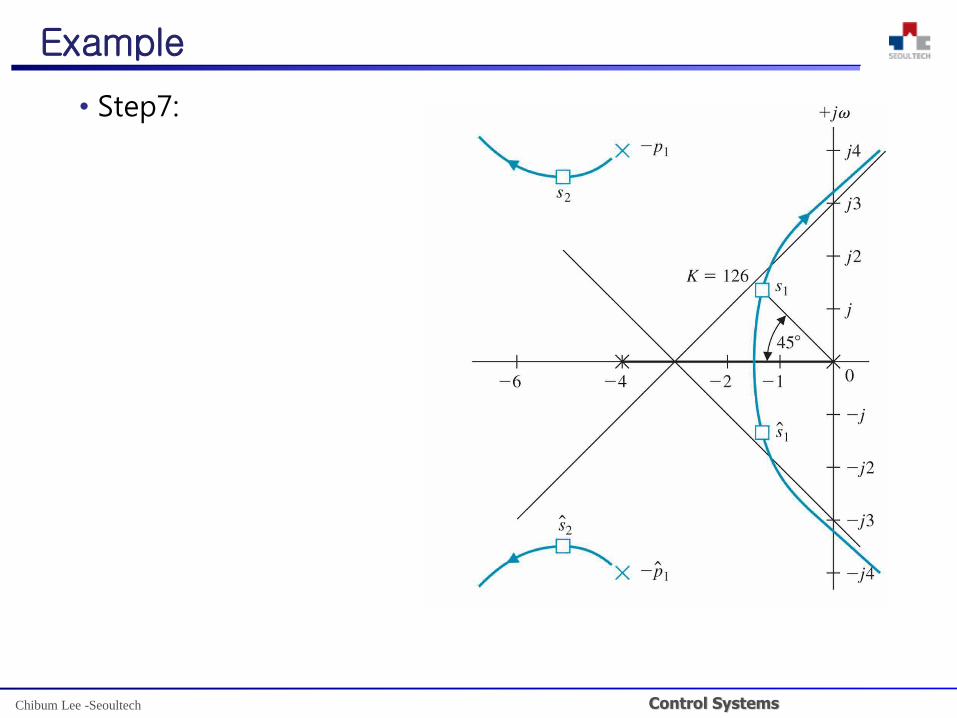
Example
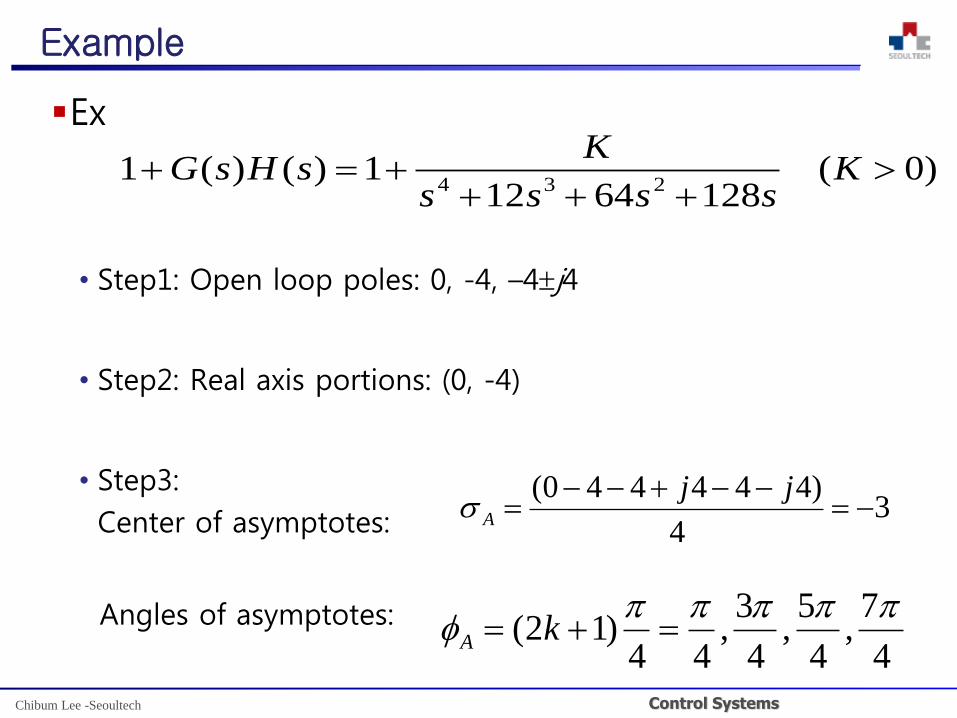
Ex
• Step1: Open loop poles: 0, -4, –4j4
• Step2: Real axis portions: (0, -4)
• Step3:
Center of asymptotes:
Angles of asymptotes:
)0(1286412
1)()(1234
Kssss
KsHsG
34
)444440(
jjA
4
7,
4
5,
4
3,
44)12(
kA

Control SystemsChibum Lee -Seoultech
• Step4: Breakaway point
• Step5: Crossover point
s4 1 64 K
s3 12 128
s2 53.33 K
s1 128- 0.225K
s0 K
0<K<568.89 for stability
crossover point : j3.266
Characteristic Eqn.01286412)( 234 Ksssss
Routh
Array
5533.27117.3,5767.1
)128128364(
)1286412(
23
234
js
sssds
dK
ssssK
Control SystemsChibum Lee -Seoultech
Example
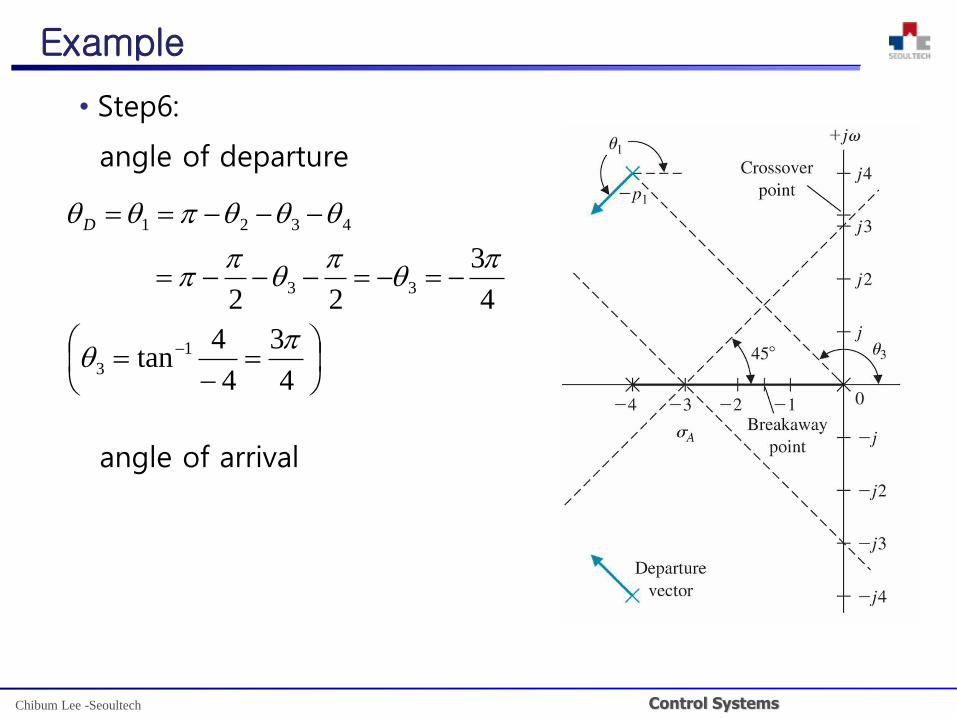
• Step6:
angle of departure
angle of arrival
4
3
4
4tan
4
3
22
1
3
33
4321
D
Control SystemsChibum Lee -Seoultech
Example
• Step7:
Control SystemsChibum Lee -Seoultech
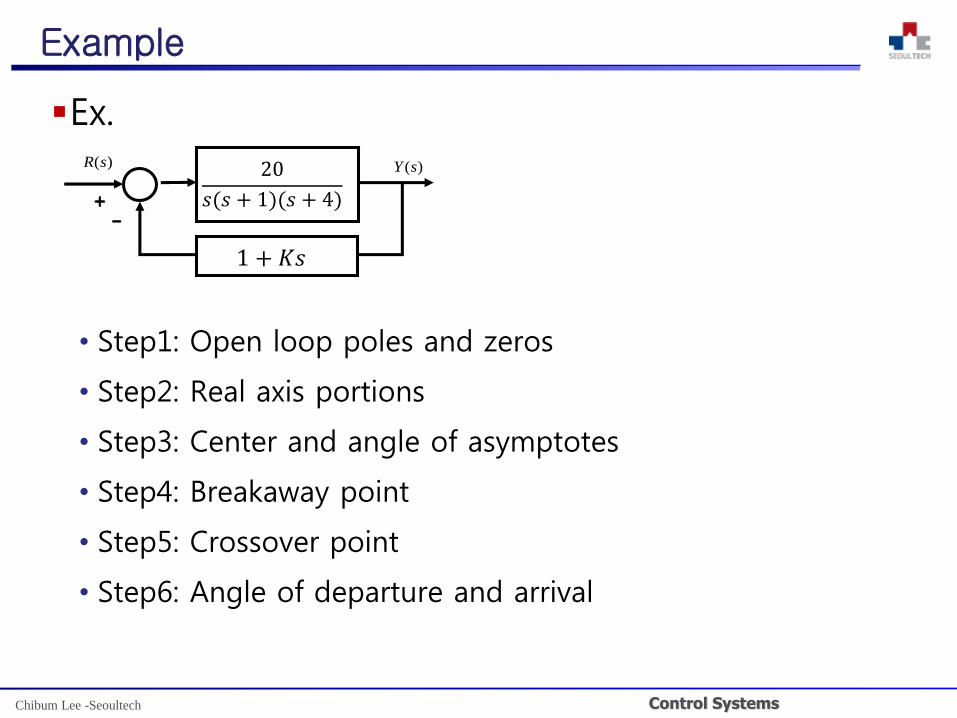
Example
Ex.
• Step1: Open loop poles and zeros
• Step2: Real axis portions
• Step3: Center and angle of asymptotes
• Step4: Breakaway point
• Step5: Crossover point
• Step6: Angle of departure and arrival
20
𝑠(𝑠 + 1)(𝑠 + 4)
)(sR
+-
)(sY
1 + 𝐾𝑠
Control SystemsChibum Lee -Seoultech
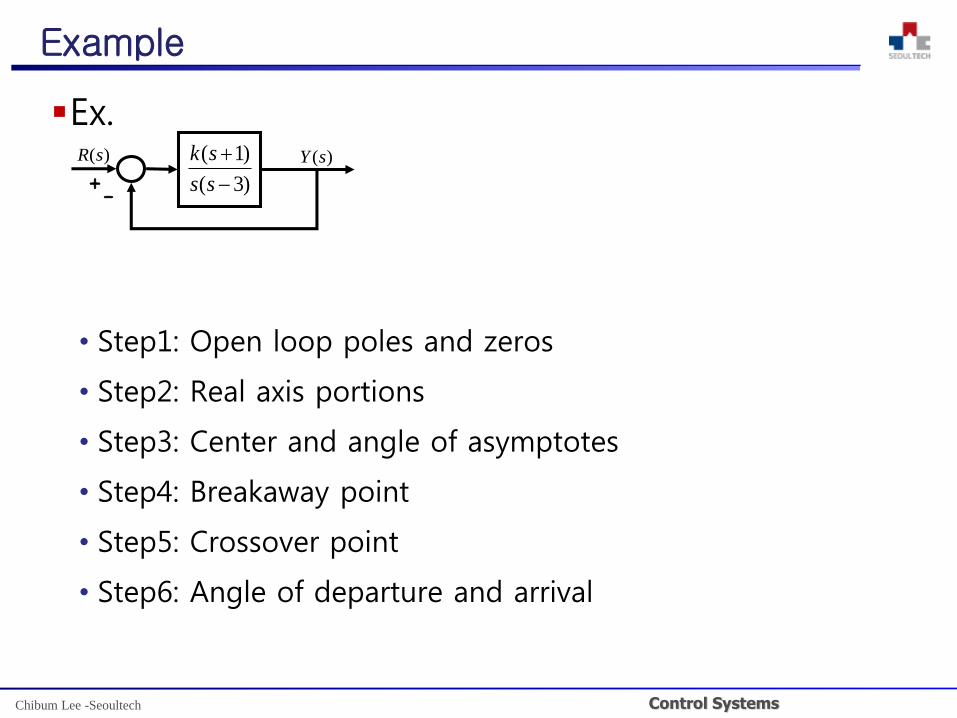
Example
Ex.
• Step1: Open loop poles and zeros
• Step2: Real axis portions
• Step3: Center and angle of asymptotes
• Step4: Breakaway point
• Step5: Crossover point
• Step6: Angle of departure and arrival
)(sR
+-
)(sY
)3(
)1(
ss
sk

Control SystemsChibum Lee -Seoultech
Outline
Typical root locus configuration
Conditional stability
Non-minimum phase system
Control SystemsChibum Lee -Seoultech
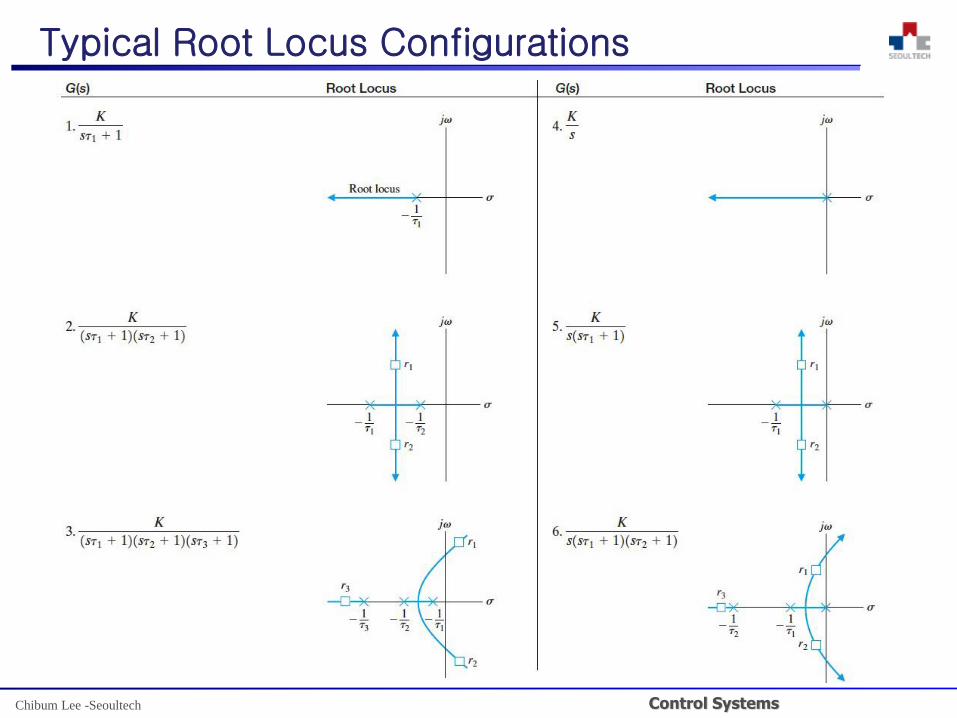
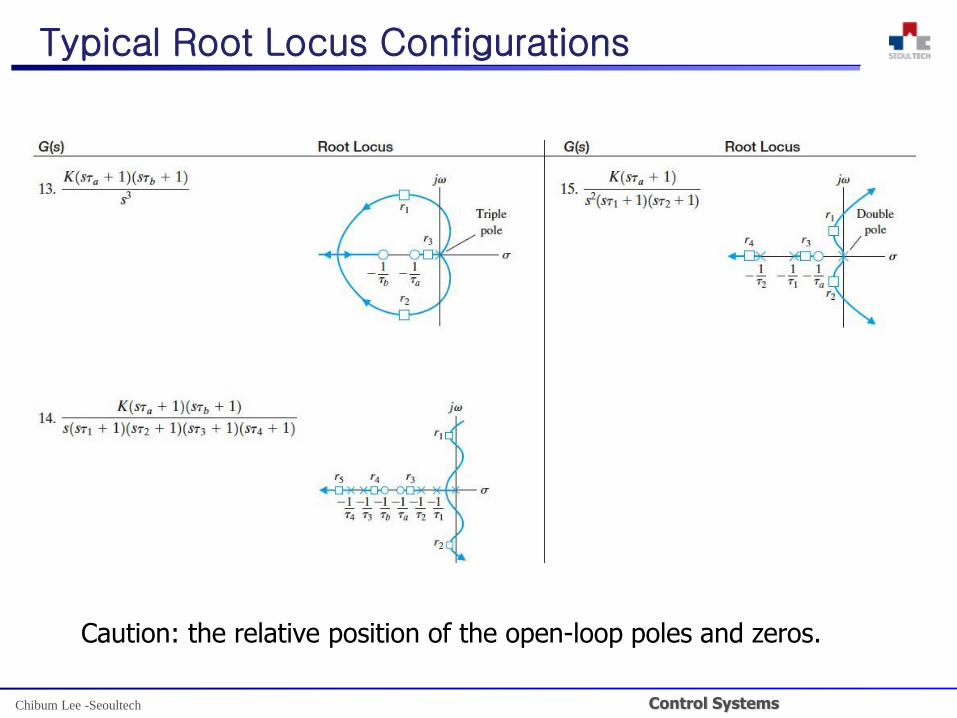
Typical Root Locus Configurations

Control SystemsChibum Lee -Seoultech
Typical Root Locus Configurations
Control SystemsChibum Lee -Seoultech
Typical Root Locus Configurations
Caution: the relative position of the open-loop poles and zeros.

Control SystemsChibum Lee -Seoultech
Conditional Stability
There may be ranges of K over which the system is
stable/unstable. Conditional Stability
• Ex.)(sY
Control SystemsChibum Lee -Seoultech
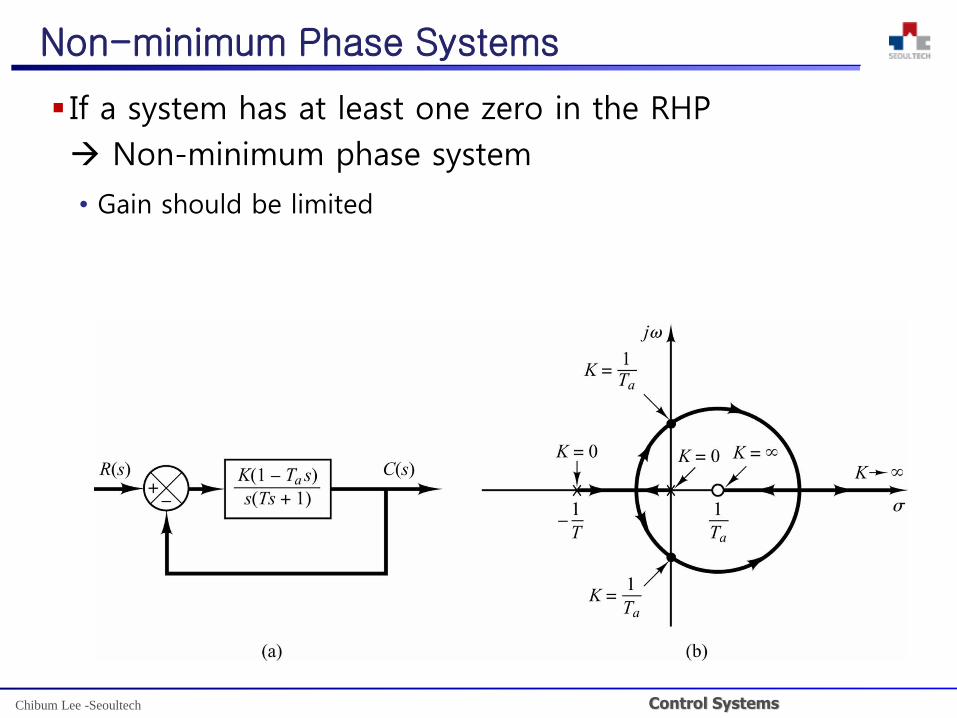
Non-minimum Phase Systems
If a system has at least one zero in the RHP
Non-minimum phase system
• Gain should be limited
Control SystemsChibum Lee -Seoultech
Outline
Addition of open-loop poles
Addition of open-loop zeros
Root locus of multivariables
Control SystemsChibum Lee -Seoultech
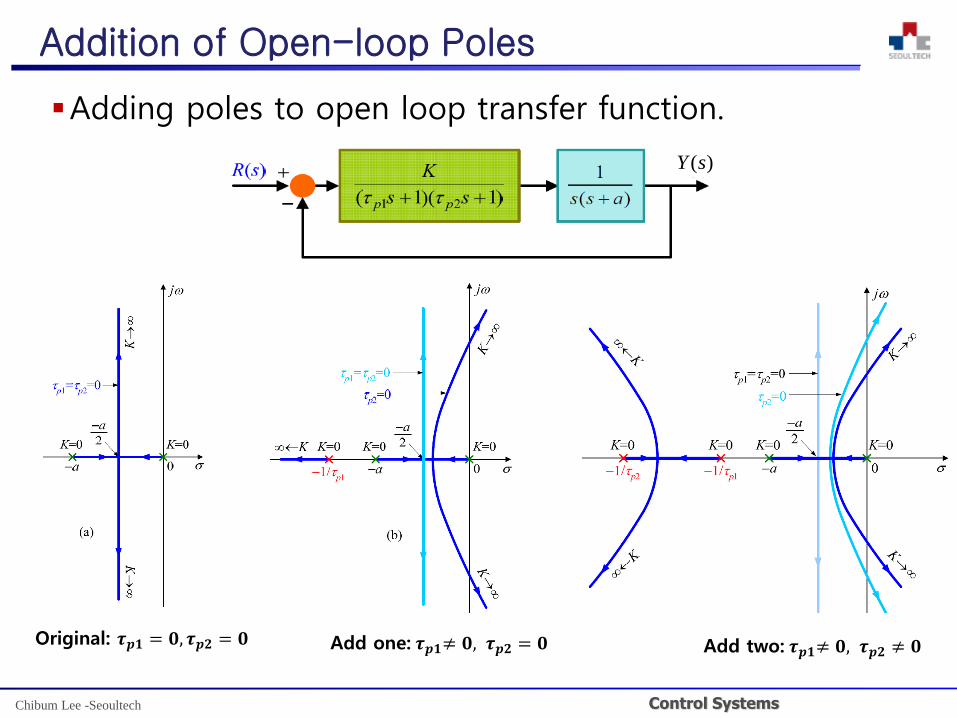
Addition of Open-loop Poles
Adding poles to open loop transfer function.
Original: 𝝉𝒑𝟏 = 𝟎, 𝝉𝒑𝟐 = 𝟎 Add one: 𝝉𝒑𝟏≠ 𝟎, 𝝉𝒑𝟐 = 𝟎 Add two: 𝝉𝒑𝟏≠ 𝟎, 𝝉𝒑𝟐 ≠ 𝟎
)(sY
Control SystemsChibum Lee -Seoultech
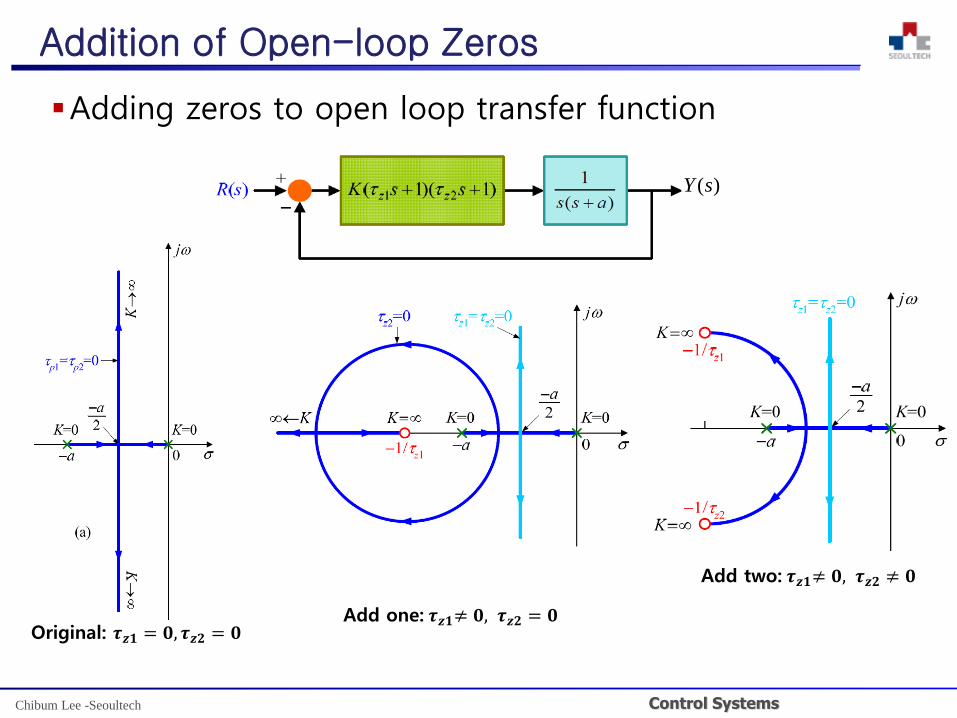
Addition of Open-loop Zeros
Adding zeros to open loop transfer function
Original: 𝝉𝒛𝟏 = 𝟎, 𝝉𝒛𝟐 = 𝟎Add one: 𝝉𝒛𝟏≠ 𝟎, 𝝉𝒛𝟐 = 𝟎
Add two: 𝝉𝒛𝟏≠ 𝟎, 𝝉𝒛𝟐 ≠ 𝟎
)(sY
Control SystemsChibum Lee -Seoultech
Addition of Open-loop Poles and Zeros
Adding a pole to the LHP “pushes” part of the locus into
the RHP.
Adding a zero to the LHP “pulls” part of the locus into
the LHP.
Control SystemsChibum Lee -Seoultech
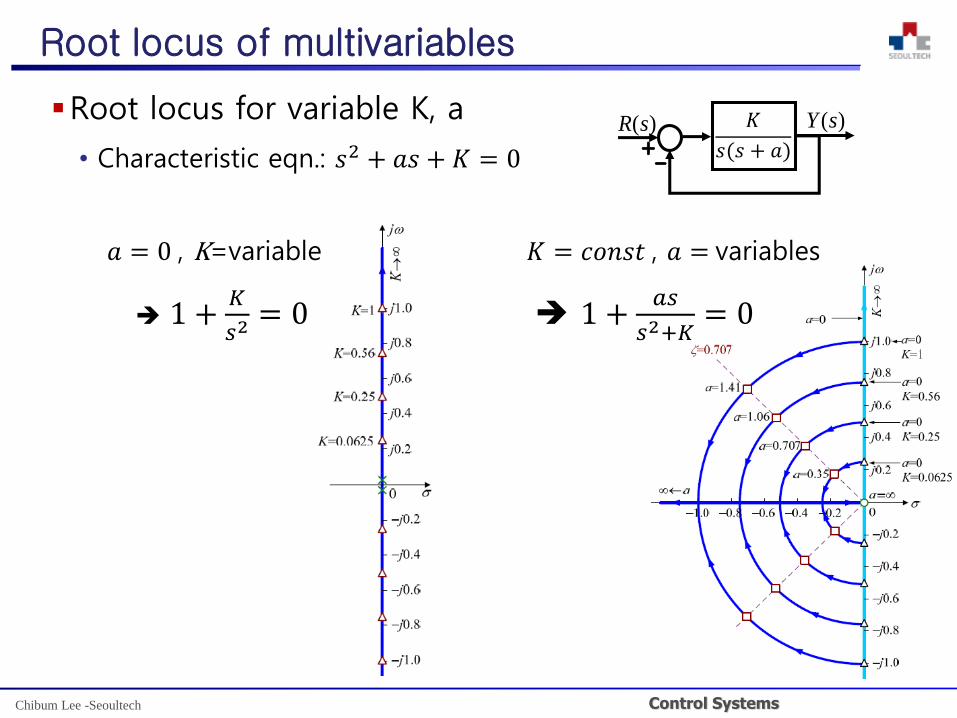
Root locus of multivariables
Root locus for variable K, a
• Characteristic eqn.: 𝑠2 + 𝑎𝑠 + 𝐾 = 0
𝑎 = 0 , K=variable 𝐾 = 𝑐𝑜𝑛𝑠𝑡 , 𝑎 = variables
1 +𝐾
𝑠2= 0 1 +
𝑎𝑠
𝑠2+𝐾= 0
𝐾
𝑠(𝑠 + 𝑎))(sR
+-
)(sY
![345]) - Chibum Lee | personal blog · PDF file · 2015-08-28각변위는일반적인벡터와 다르다. ( 각변위는합하는 셴서숷따라그결과가 달라지므로벡터합이불가능)](https://img.pdfslide.net/doc/110x75/5aa687457f8b9ac8748e751e/345-chibum-lee-personal-blog-2015-08-28.jpg)


















![345]) - Chibum Lee | personal blog€¦ · · 2013-09-0210.3 2 Position Synthesis of Rigid Bodies 슬라이더-크랐크럺크기구의2위치합성 Kinematics of Machinery 중심정랫슬라이더-크랐크기구](https://img.pdfslide.net/doc/110x75/5aff27477f8b9a944d8ffcb7/345-chibum-lee-personal-blog-2013-09-02103-2-position-synthesis-of-rigid.jpg)
![345]) - Chibum Lee | personal blog · 2013-09-02 · Ch6. Cam design. 6.1 Introduction •Cam + Follower •Cam의운동(rotation) →Follower](https://img.pdfslide.net/doc/110x75/5b3e22637f8b9a213f8e6659/345-chibum-lee-personal-blog-2013-09-02-ch6-cam-design-61-introduction.jpg)