Embed Size (px)
Citation preview

CONTROLLI AUTOMATICI
1
Sistemi con ritardo - esercitazione
Ing. Alessandro Pisano [email protected]
1. Sistema del primo ordine 2. Miscelatore

2
Alessandro Pisano - [email protected]
1 Si consideri il sistema
ses
sF
1
1
con regolatore proporzionale avente guadagno KR=5
1 Calcolare il massimo ritardo ammissibile (ritardo critico)
2 Verificare mediante simulazione che valori del ritardo maggiori/minori del ritardo critico destabilizzano/mantengono stabile il sistema a ciclo chiuso
3 Verificare i risultati ottenuti mediante il Criterio di Bode
4 Realizzare il controllo con predittore di Smith e verificare mediante simulazione come la stabilità a ciclo chiuso sia garantita per qualunque valore del ritardo
5 Analizzare mediante simulazione e mediante il criterio di Bode le prestazioni del predittore di Smith (PdS) nel caso in cui il ritardo =0.5 del processo sia sconosciuto ed il PdS utilizzi una sua stima affetta da errore

3
Alessandro Pisano - [email protected]
)(ty
d
desy ses
1
15
clear all
clc
P=tf(1,[1 1])
k_R=5;
margin(k_R*P)
1 Calcolare il massimo ritardo ammissibile (ritardo critico)

4
-30
-25
-20
-15
-10
-5
0
5
10
15
20
Magnitu
de (
dB
)
10-2
10-1
100
101
102
-90
-45
0
Phase (
deg)
Bode Diagram
Gm = Inf , Pm = 102 deg (at 4.9 rad/s)
Frequency (rad/s)
sec/9.4 radt Pulsazione di attraversamento
Margine di fase 102fmscr 361.0

5
Calcolo automatico del ritardo critico
clear all
clc
P=tf(1,[1 1])
k_R=5;
margin(k_R*P)
[Mg,Mfi,omegac,omegat]=margin(k_R*P)
Mfirad=2*pi*Mfi/360
delta_cr=Mfirad/omegat

6
1.0
2 Verificare mediante simulazione che valori del ritardo maggiori/minori del ritardo critico destabilizzano/mantengono stabile il sistema a ciclo chiuso

7
3.0
37.0

8
2.1 Calcolare il valore di regime dell’uscita mediante il principio di sovrapposizione degli effetti
6
5
ssW y
ydes
6
1
ssW y
d
1desy 0d
6
501 y
ydesWyty
0desy 1d
6
102 y
dWyty
1desy 1d
121 yyty

9
2.2 Calcolare il valore di regime dell’uscita mediante il principio di sovrapposizione degli effetti in corrispondenza di:
5desy 5.0d
Verificare il risultato ottenuto mediante simulazione
6
5
ssW y
ydes
6
1
ssW y
d
0d
16.46
25051 y
ydesWyty
0desy
083.012
105.02 y
dWyty
243.421 yyty
5desy
5.0d
5desy 5.0d

10
Alessandro Pisano - [email protected]
3 Verificare i risultati ottenuti al passo 2 mediante il Criterio di Bode
delta=0.1;
s = tf('s');
L = 5*exp(-delta*s)/(s+1);
margin(L),grid
-30
-20
-10
0
10
20
Magnitu
de (
dB
)
10-2
10-1
100
101
102
-720
-540
-360
-180
0
Phase (
deg)
Bode Diagram
Gm = 10.3 dB (at 16.3 rad/s) , Pm = 73.5 deg (at 4.9 rad/s)
Frequency (rad/s)
11
Alessandro Pisano - [email protected]
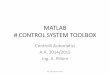
3 Verificare i risultati ottenuti mediante il Criterio di Bode
delta=0.2;
s = tf('s');
L = 5*exp(-delta*s)/(s+1);
margin(L),grid
-30
-20
-10
0
10
20
Magnitu
de (
dB
)
10-2
10-1
100
101
102
-1440
-1080
-720
-360
0
Phase (
deg)
Bode Diagram
Gm = 4.61 dB (at 8.44 rad/s) , Pm = 45.4 deg (at 4.9 rad/s)
Frequency (rad/s)

12
Alessandro Pisano - [email protected]
3 Verificare i risultati ottenuti mediante il Criterio di Bode
delta=0.3;
s = tf('s');
L = 5*exp(-delta*s)/(s+1);
margin(L),grid
-30
-20
-10
0
10
20
Magnitu
de (
dB
)
10-2
10-1
100
101
102
-1800
-1440
-1080
-720
-360
0
Phase (
deg)
Bode Diagram
Gm = 1.42 dB (at 5.8 rad/s) , Pm = 17.3 deg (at 4.9 rad/s)
Frequency (rad/s)

13
Alessandro Pisano - [email protected]
3 Verificare i risultati ottenuti mediante il Criterio di Bode
delta=delta_cr;
s = tf('s');
L = 5*exp(-delta*s)/(s+1);
margin(L),grid
-30
-20
-10
0
10
20
Magnitu
de (
dB
)10
-210
-110
010
110
2-2160
-1800
-1440
-1080
-720
-360
0
Phase (
deg)
Bode Diagram
Gm = -4.8e-06 dB (at 4.9 rad/s) , Pm = 0 deg (at 4.9 rad/s)
Frequency (rad/s)
14
Alessandro Pisano - [email protected]
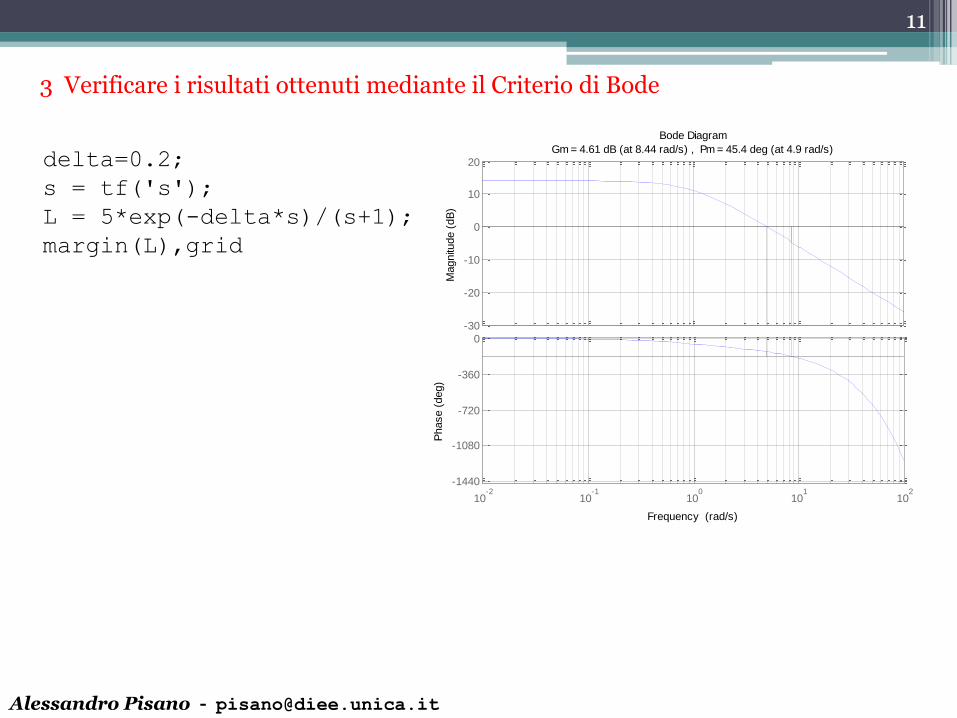
3 Verificare i risultati ottenuti mediante il Criterio di Bode
delta=0.37;
s = tf('s');
L = 5*exp(-delta*s)/(s+1);
margin(L),grid
-30
-20
-10
0
10
20
Magnitu
de (
dB
)
10-2
10-1
100
101
102
-2160
-1800
-1440
-1080
-720
-360
0
Phase (
deg)
Bode Diagram
Gm = -0.169 dB (at 4.8 rad/s) , Pm = -2.32 deg (at 4.9 rad/s)
Frequency (rad/s)
15
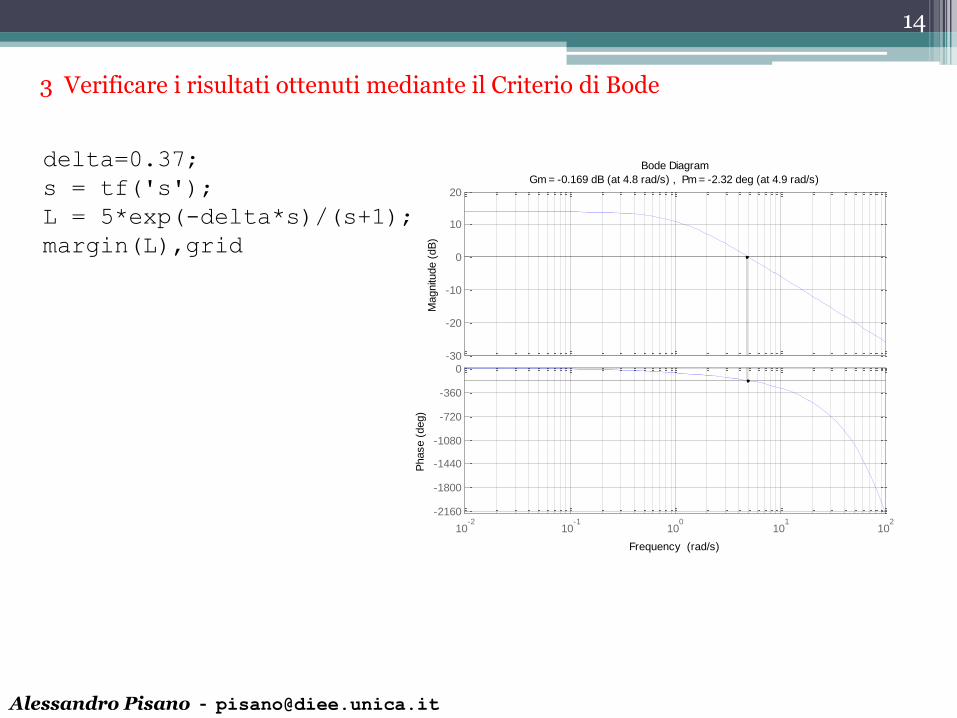
4 Realizzare il controllo con predittore di Smith e verificare mediante simulazione come la stabilità a ciclo chiuso sia garantita per qualunque valore del ritardo

16
5 Analizzare mediante simulazione e mediante il criterio di Bode le prestazioni del predittore di Smith (PdS) nel caso in cui il ritardo =0.5 del processo sia sconosciuto ed il PdS utilizzi una sua stima affetta da errore
Il processo ha ritardo =0.5 ma tale valore non è noto, ed il PdS deve pertanto utilizzare una sua stima nom affetta da errore.
Valutare mediante simulazione il range di valori per nom che garantisce la stabilità a ciclo chiuso
0.07 < nom < 0.83 Risultato:

17
)(ty
d
desy ses
1
15
snomes
1
1
1
1
s
)(tz
Per analizzare la stabilità a ciclo chiuso possibile rimuovere il disturbo d. La stabilita a ciclo chiuso dipende infatti unicamente da come sia strutturato l’anello di retroazione.
u

18
)(ty
desy ses
1
15
snomes
1
1
1
1
s
)(tz

19
)(tz
desy 11
1
ss nomees
5
Schema equivalente
delta=0.5;
delta_hat=0.4;
s = tf('s');
L=5*(exp(-delta*s)-exp(-delta_hat*s)+1)/(s+1)
margin(L)

20
delta=0.5;
delta_hat=0.4;
s = tf('s');
L=5*(exp(-delta*s)-exp(-delta_hat*s)+1)/(s+1)
margin(L)
-60
-50
-40
-30
-20
-10
0
10
20
Magnitu
de (
dB
)
10-2
10-1
100
101
102
103
-15840
-14400
-12960
-11520
-10080
-8640
-7200
-5760
-4320
-2880
-1440
0
Phase (
deg)
Bode Diagram
Gm = 10.3 dB (at 15.7 rad/s) , Pm = 104 deg (at 3.25 rad/s)
Frequency (rad/s)

21
Criterio di stabilita di Nyquist
y
desy sD
sN
Il sistema di controllo è asintoticamente stabile a ciclo chiuso se e solo se la regione di piano circondata dal diagramma di Nyquist completo della FdT a ciclo aperto non contiene il punto dell’asse reale avente ascissa -1
non ha poli a parte reale positive
sD
sN
NB Il diagramma di Nyquist completo corrisponde al range di frequenza
,
sN puo contenere termini esponenziali

22
delta=0.5;
delta_hat=0.4;
s = tf('s');
L=5*(exp(-delta*s)-exp(-delta_hat*s)+1)/(s+1)
nyquist(L)
-1 0 1 2 3 4 5-3
-2
-1
0
1
2
3
Nyquist Diagram
Real Axis
Imagin
ary
Axis

23
delta=0.5;
delta_hat=0.9;
s = tf('s');
L=5*(exp(-delta*s)-exp(-delta_hat*s)+1)/(s+1)
nyquist(L,[-1e4:0.1:1e4])
-2 -1 0 1 2 3 4 5-4
-3
-2
-1
0
1
2
3
4
Nyquist Diagram
Real Axis
Imagin
ary
Axis

24
Miscelatore

25
Descriviamo nel dettaglio tutte le componenti del sistema ricavando anche opportune equazioni di funzionamento che ci consentano di costruire un modello Simulink e simulare il funzionamento del miscelatore.
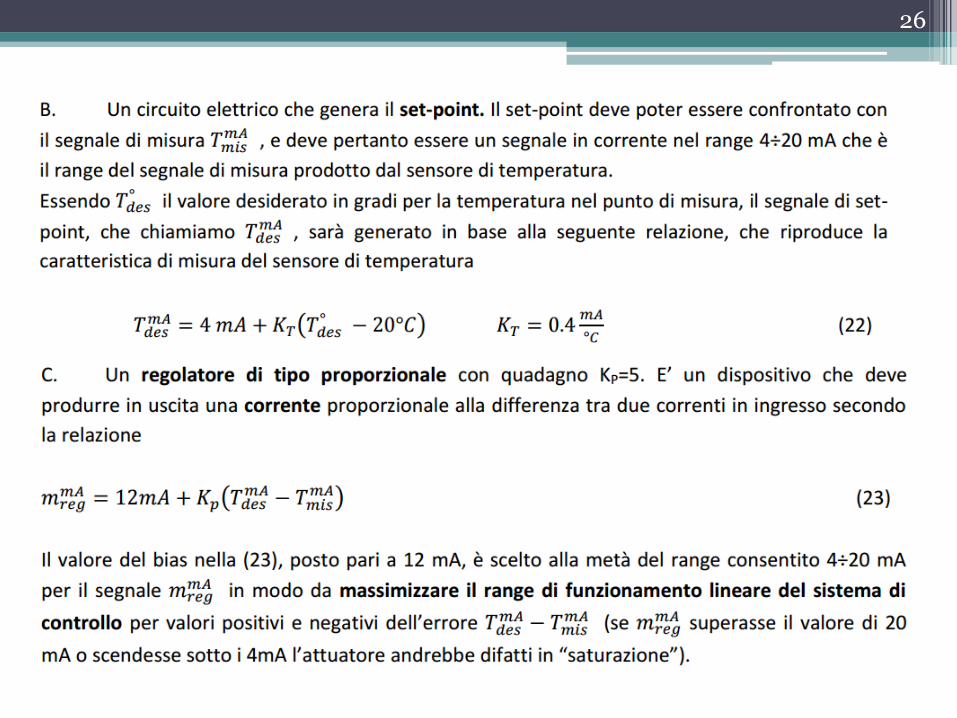
26

27

28

29

30
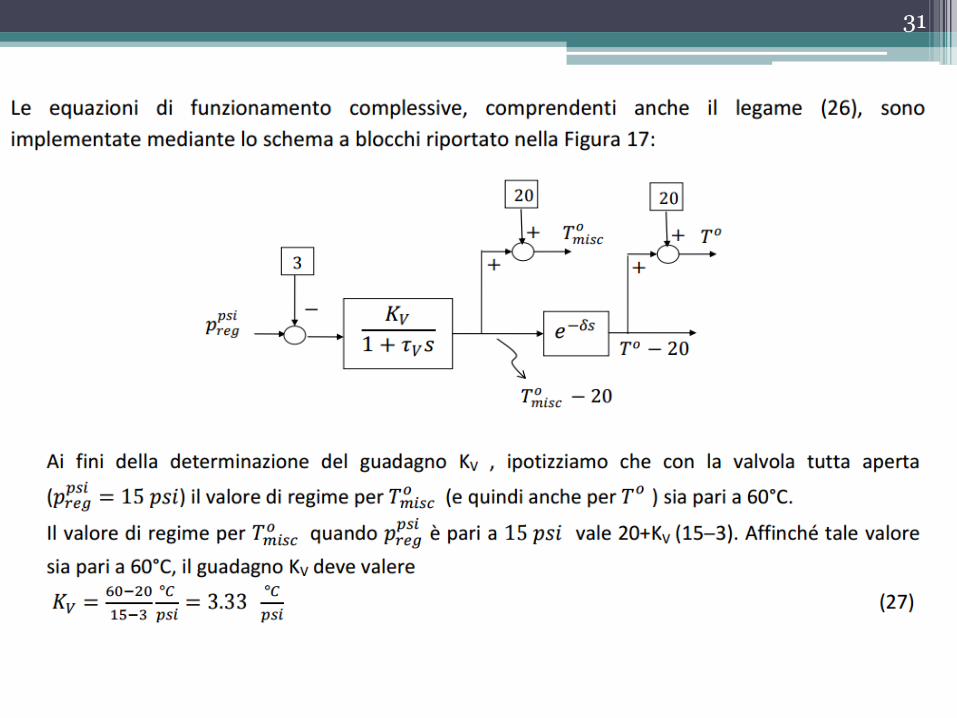
31

32

33

34

35
delta1=0;
delta2=0.5;
delta3=1;
s = tf('s');
H1 = exp(-delta1*s)*Kp*mu_IP*mu_V*K_TT/(tau_V*tau_IP*s^2+(tau_V+tau_IP)*s+1);
H2 = exp(-delta2*s)*Kp*mu_IP*mu_V*K_TT/(tau_V*tau_IP*s^2+(tau_V+tau_IP)*s+1);
H3 = exp(-delta3*s)*Kp*mu_IP*mu_V*K_TT/(tau_V*tau_IP*s^2+(tau_V+tau_IP)*s+1);
W=logspace(-2,1,200)
bode(H1,H2,H3,W),grid,legend('\delta=0','\delta=0.5','\delta=1')

36
-35
-30
-25
-20
-15
-10
-5
0
5
10
15
Magnitu
de (
dB
)
10-2
10-1
100
101
-810
-720
-630
-540
-450
-360
-270
-180
-90
0
Phase (
deg)
Bode Diagram
Frequency (rad/s)
=0
=0.5
=1

37

38

39

40

41
Realizzare il predittore di Smith per rendere stabile il sistema di controllo indipendemente dal valore del guadagno
File_miscelatore_Smith
Realizzare il sistema di controllo con regolatore PI
Cancellare con lo zero del regolatore uno dei due poli del processo
Valutare il ritardo critico.
Realizzare il predittore di Smith per il sistema di controllo con regolatore PI
File_miscelatore_PI
File_miscelatore_SmithPI