Embed Size (px)
Citation preview

Controlli automaticiControlli automaticiper la meccatronicaper la meccatronica
Sistemi di controllo
Prof. Paolo Rocco ([email protected])
Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [2]
Che cos’è un sistema dinamico?Che cos’è un sistema dinamico?
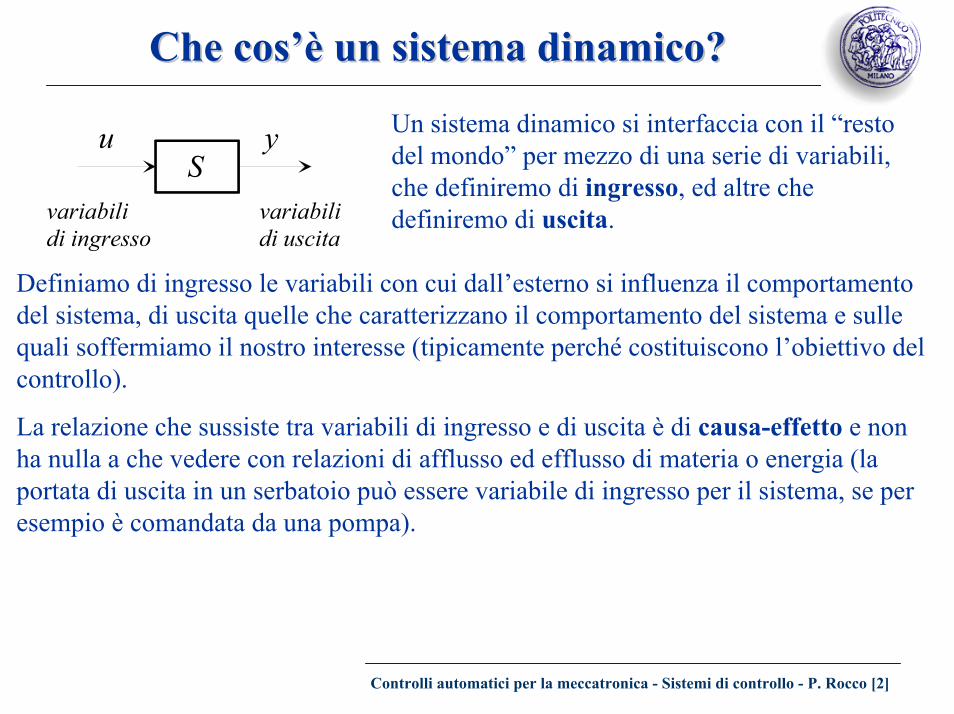
Un sistema dinamico si interfaccia con il “resto del mondo” per mezzo di una serie di variabili, che definiremo di ingresso, ed altre che definiremo di uscita.
Su y
variabilidi ingresso
variabilidi uscita
Definiamo di ingresso le variabili con cui dall’esterno si influenza il comportamento del sistema, di uscita quelle che caratterizzano il comportamento del sistema e sulle quali soffermiamo il nostro interesse (tipicamente perché costituiscono l’obiettivo del controllo).
La relazione che sussiste tra variabili di ingresso e di uscita è di causa-effetto e non ha nulla a che vedere con relazioni di afflusso ed efflusso di materia o energia (la portata di uscita in un serbatoio può essere variabile di ingresso per il sistema, se per esempio è comandata da una pompa).
Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [3]
L’ordine del sistemaL’ordine del sistema
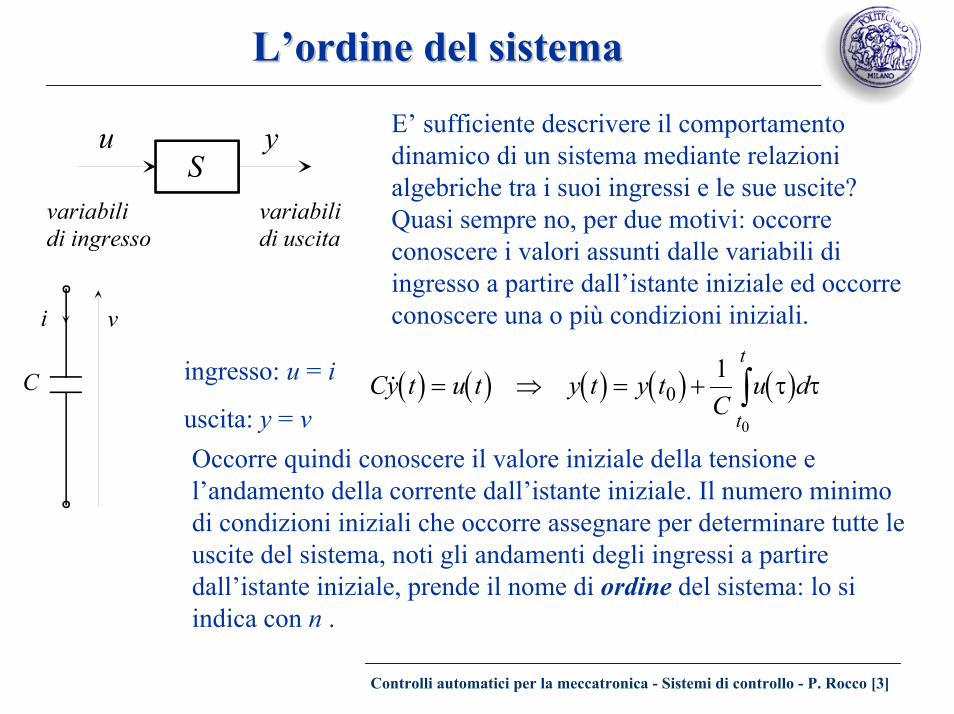
E’ sufficiente descrivere il comportamento dinamico di un sistema mediante relazioni algebriche tra i suoi ingressi e le sue uscite? Quasi sempre no, per due motivi: occorre conoscere i valori assunti dalle variabili di ingresso a partire dall’istante iniziale ed occorre conoscere una o più condizioni iniziali.
Su y
variabilidi ingresso
variabilidi uscita
C
i v
( ) ( ) ( ) ( ) ( )Cy t u t y t y tC
u dt
t& = ⇒ = + ∫0
1
0
τ τingresso: u = i
uscita: y = vOccorre quindi conoscere il valore iniziale della tensione e l’andamento della corrente dall’istante iniziale. Il numero minimo di condizioni iniziali che occorre assegnare per determinare tutte le uscite del sistema, noti gli andamenti degli ingressi a partire dall’istante iniziale, prende il nome di ordine del sistema: lo si indica con n .

Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [4]
Lo statoLo stato
Lo stato del sistema ad un dato istante riassume tutta la storia passata del sistema fino a quell’istante ed è quindi quanto occorre conoscere per calcolare le uscite da quell’istante in poi, noti gli ingressi. Per quanto affermato sopra, lo stato si può esprimere per mezzo di n variabili, indicate con i simboli x1, x2, ... ,xn, che prendono il nome di variabili di stato.
Sia m il numero delle variabili di ingresso e p il numero di variabili di uscita. Si introducono i tre vettori:
=
=
=
pmn y
y
y
u
u
u
x
x
x
MMM
2
1
2
1
2
1
,, yux

Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [5]
Definizione di sistema dinamicoDefinizione di sistema dinamico
Introdotte le due funzioni vettoriali:
( )
( )( )
( )
( )
( )( )
( )
=
=
mnp
mn
mn
mnn
mn
mn
uuuxxxg
uuuxxxguuuxxxg
uuuxxxf
uuuxxxfuuuxxxf
,...,,,,...,,
,...,,,,...,,,...,,,,...,,
,
,
,...,,,,...,,
,...,,,,...,,,...,,,,...,,
,
2121
21212
21211
2121
21212
21211
M
M
uxg
uxf
la formulazione vettoriale del sistema dinamico è la seguente :
( ) ( ) ( )( )( ) ( ) ( )( )ttt
tttuxgyuxfx
,,
==&

Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [6]
Il sistema dinamico: esempiIl sistema dinamico: esempi
( ) ( ) ( ) ( )tKptDvtvMtF ++= &Oscillatore meccanico:
MF
p
K
D
ingresso: u = Fuscita: y = pvar. di stato: x1 = p, x2 = v
( ) ( )
( ) ( ) ( ) ( )( )
( ) ( )
&
&
x t x t
x tM
Kx t Dx t u t
y t x t
1 2
2 1 2
1
1
=
= − − +
=
( ) ( ) ( )( )tmgltmlt ϑ+ω=τ sin2 &Pendolo:
mg
lϑ
τ
( ) ( )
( ) ( )( ) ( )
( ) ( )
&
& sin
x t x t
x tgl
x tml
u t
y t x t
1 2
2 1 2
1
1
=
= − +
=
ingresso: u = τuscita: y = ϑvar. di stato: x1 = ϑ, x2 = ω
Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [7]
Il sistema dinamico: classificazioniIl sistema dinamico: classificazioni
• Si dicono SISO (Single Input Single Output) i sistemi per cui m=p=1, genericamente MIMO (Multiple Input Multiple Output) gli altri.
• Si dicono lineari i sistemi in cui tutte le equazioni di stato e tutte le trasformazioni di uscita sono funzioni lineari delle variabili di stato e delle variabili di ingresso, non lineari tutti gli altri.
Oscillatore meccanico: SISO, lineare
Pendolo: SISO, non lineare

Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [8]
MovimentoMovimento
Assegnata una condizione iniziale all’istante t0:
e una funzione di ingresso a partire da t0:
diciamo movimento dello stato x(t) la soluzione delle equazioni di stato corredate dalla condizione iniziale assegnata:
e movimento dell’uscita la conseguente uscita, ricavabile dalla trasformazione d’uscita:
( ) 00 xx =t
( ) ( ) 0, tttt ≥= uu
( ) ( ) ( )( )( ) 00
,xx
uxfx=
=t
ttt&
( ) ( ) ( )( )ttt uxgy ,=
−
Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [9]
EquilibrioEquilibrio
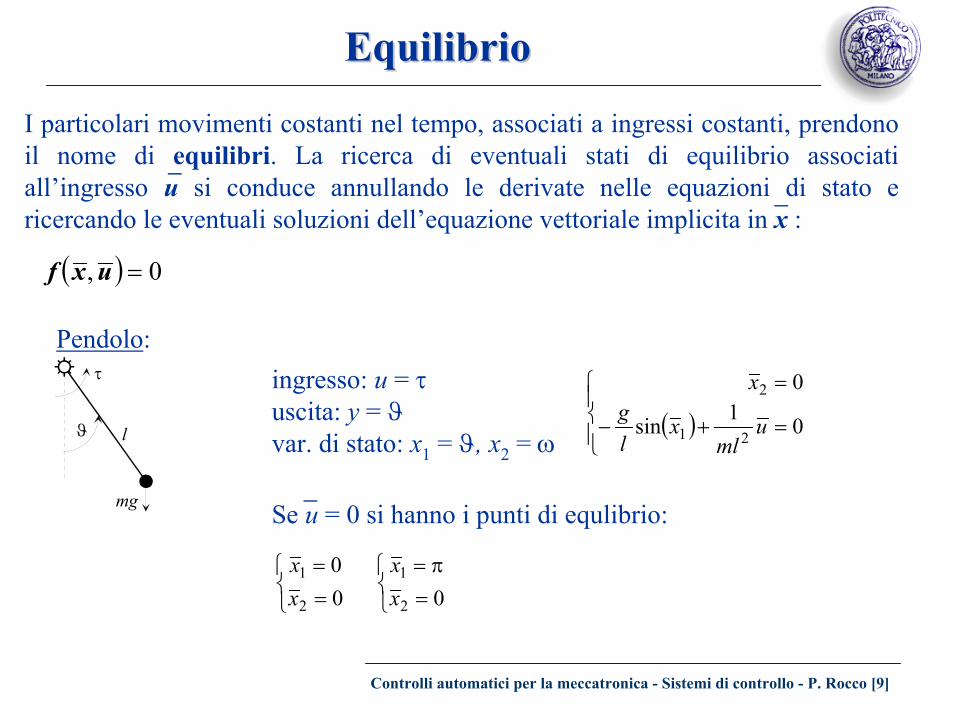
I particolari movimenti costanti nel tempo, associati a ingressi costanti, prendono il nome di equilibri. La ricerca di eventuali stati di equilibrio associati all’ingresso u si conduce annullando le derivate nelle equazioni di stato e ricercando le eventuali soluzioni dell’equazione vettoriale implicita in x :
−−
( ) 0, =uxf
Pendolo:
mg
lϑ
τ ingresso: u = τuscita: y = ϑvar. di stato: x1 = ϑ, x2 = ω
( )
=+−
=
01sin
0
21
2
uml
xlg
x
Se u = 0 si hanno i punti di equlibrio:−
==
00
2
1
xx
=π=02
1
xx

Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [10]
Sistemi lineariSistemi lineari
Quando tutte le equazioni del sistema sono lineari nelle varibili di stato e di ingresso, il sistema è lineare ed è descritto dalle equazioni:
( ) ( ) ( )( ) ( ) ( )ttt
tttDuCxyBuAxx
+=+=&
Oscillatore meccanico: ( ) ( )
( ) ( ) ( ) ( )( )
( ) ( )
&
&
x t x t
x tM
Kx t Dx t u t
y t x t
1 2
2 1 2
1
1
=
= − − +
=[ ] 0,01
10
,10
==
=
−−=
DC
BAMM
DMK
MF
p
K
D
Un sistema lineare si può anche ottenere per linearizzazione di un sistema non lineare nell’intorno di un suo stato di equilibrio:
uxux ugD
xgC
,,,
∂∂
=∂∂
=uxux u
fBxfA
,,,
∂∂
=∂∂
=
Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [11]
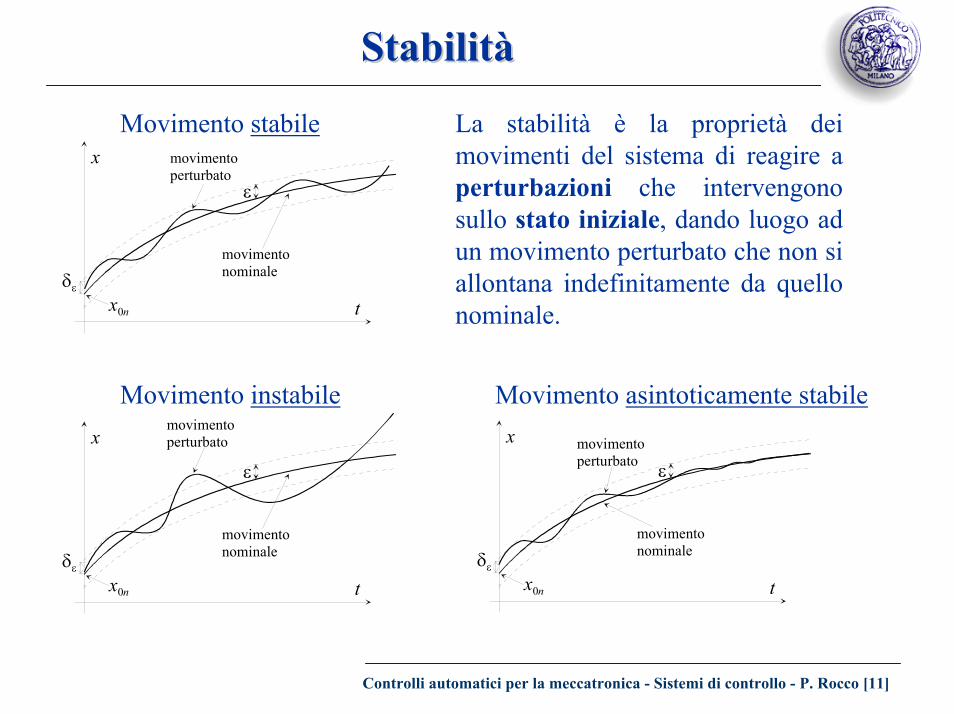
StabilitàStabilità
Movimento stabile La stabilità è la proprietà dei movimenti del sistema di reagire a perturbazioni che intervengono sullo stato iniziale, dando luogo ad un movimento perturbato che non si allontana indefinitamente da quello nominale.
x
t
movimentoperturbato
movimentonominale
x0n
ε
δε
Movimento instabile Movimento asintoticamente stabilex
t
movimentoperturbato
movimentonominale
x0n
ε
δε
x
t
movimentoperturbato
movimentonominale
x0n
ε
δε
Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [12]
Stabilità nei sistemi lineariStabilità nei sistemi lineari
In generale la stabilità è una proprietà dei singoli movimenti.Per i sistemi lineari si dimostra che la discussione della stabilità di ogni movimento porta all’analisi delle soluzioni dell’equazione:
( ) ( ) ( ) .0, 0xxxAx δ=δδ=δ tt&
con:
( ) ( ) ( ) .:,: 000 npnp ttt xxxxxx −=δ−=δ
Poiché il risultato di questa analisi è lo stesso qualunque sia il movimento di partenza, si può concludere che tutti i movimenti del sistema sono stabili, o instabili o asintoticamente stabili. La stabilità è quindi una proprietà del sistema.

Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [13]
Criterio degli Criterio degli autovaloriautovalori
Dall’analisi delle soluzioni dell’equazione:
( ) ( ) ( ) .0, 0xxxAx δ=δδ=δ tt&
si possono trarre le seguenti conclusioni (valide per matrice Adiagonalizzabile).
Un sistema dinamico lineare è:asintoticamente stabile: se e solo se tutti gli autovalori di A hanno parte reale negativa;stabile: se e solo se tutti gli autovalori di A hanno parte reale negativa o nulla e ne esistono a parte reale nulla;instabile: se e solo se esistono autovalori di A a parte reale positiva

Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [14]
Funzione di trasferimentoFunzione di trasferimento
Si consideri un sistema lineare:( ) ( ) ( )( ) ( ) ( )ttt
tttDuCxyBuAxx
+=+=&
E’ noto che una rappresentazione alternativa del sistema si ottiene introducendo i vettori U(s) e Y(s), rispettivamente vettori delle trasformate di Laplace degli ingressi e delle uscite del sistema dinamico.
u(t)
y(t)
U(s)
Y(s)
eq. differenziali eq. algebriche
trasformata
antitrasformata
Assunto lo stato iniziale del sistema nullo, il legame tra i due vettori èespresso dalla funzione di trasferimento (matrice p×m):
( ) ( ) DBAICG +−= −1nss

Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [15]
Calcolo della funzione di trasferimentoCalcolo della funzione di trasferimento( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
& ...& ...
& ......
x t a x t a x t a x t b u tx t a x t a x t a x t b u t
x t a x t a x t a x t b u ty t c x t c x t c x t du t
n n
n n
n n n nn n n
n n
1 11 1 12 2 1 1
2 21 1 22 2 2 2
1 1 2 2
1 1 2 2
= + + + += + + + +
= + + + +
= + + + +
M
Dal sistema (SISO) in t ...
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
sX s a X s a X s a X s b U ssX s a X s a X s a X s b U s
sX s a X s a X s a X s b U sY s c X s c X s c X s dU s
n n
n n
n n n nn n n
n n
1 11 1 12 2 1 1
2 21 1 22 2 2 2
1 1 2 2
1 1 2 2
= + + + += + + + +
= + + + +
= + + + +
...
...
......
M
… al sistema in s
( ) ( )( )sUsYsG =Si risolve il sistema in s: f.d.t.
Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [16]
Struttura della funzione di trasferimentoStruttura della funzione di trasferimento
( ) ( )( )sDsNsG = La funzione di trasferimento è razionale (rapporto di
polinomi).
( ) ( )( ) ( )( )( ) ( ) nm
pspspszszszssG
n
m ≤−−−−−−
ρ= ,21
21L
L Se il denominatoreè di grado n, si hannon poli (nel campo complesso)ρ: costante di trasferimento,
zi: zeripi: poli
( ) ( )( ) ( )( )( ) ( )n
mg sTsTsT
ssss
sG~21
~21111111
+++τ+τ+τ+µ
=L
L g conta il numero di poli o zeri in s = 0
µ: guadagnog: tipoTi, τi: costanti di tempo
Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [17]
Stabilità e f.d.t.Stabilità e f.d.t.
Il denominatore della funzione di trasferimento coincide, a meno di cancellazioni, con il polinomio caratteristico della matrice A.Pertanto l’analisi di stabilità può essere condotta anche sui poli della funzione di trasferimento:
Tutti i poli a parte reale negativa ⇒ as. stabilità
Almeno un polo a parte reale positiva ⇒ instabilità
Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [18]
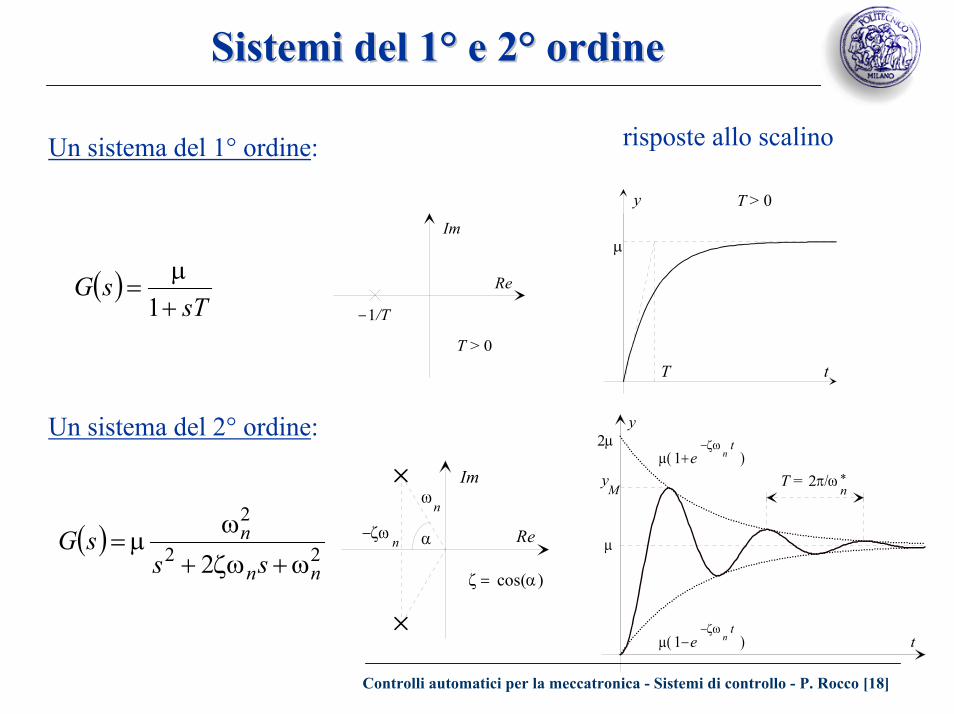
Sistemi del 1° e 2° ordineSistemi del 1° e 2° ordine
risposte allo scalino Un sistema del 1° ordine:
y
tT
µ
T > 0
Im
Re
−1/T
T > 0
( )sT
sG+µ
=1
Un sistema del 2° ordine: y2µ
µ
t
T = 2π/ωn
µ(1+e )−ζω t
n
*
µ(1−e )−ζω t
n
yM
Im
Re
ω
−ζω α
ζ = cos(α)
n
n( ) 22
2
2 nn
n
sssG
ω+ζω+
ωµ=
Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [19]
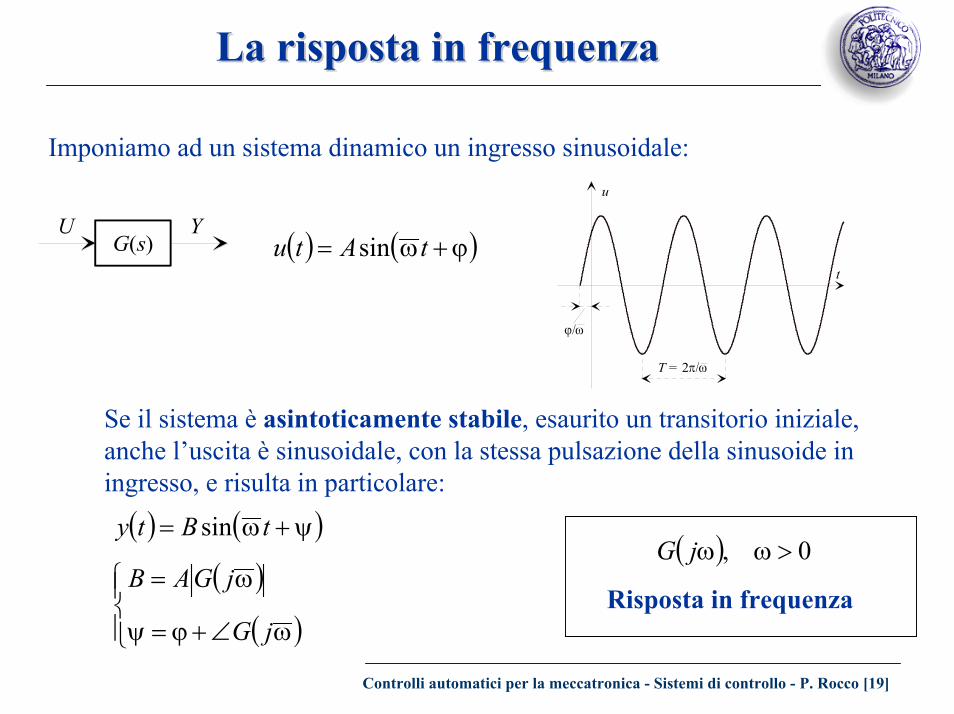
La risposta in frequenzaLa risposta in frequenza
Imponiamo ad un sistema dinamico un ingresso sinusoidale:
T = 2π/ω
ϕ/ω
t
u
G(s)U Y
( ) ( )ϕ+ω= tAtu sin
Se il sistema è asintoticamente stabile, esaurito un transitorio iniziale,anche l’uscita è sinusoidale, con la stessa pulsazione della sinusoide iningresso, e risulta in particolare:
( ) ( )ψ+ω= tBty sin( ) 0, >ωωjG
Risposta in frequenza( )
( )
ω∠+ϕ=ψ
ω=
jG
jGAB
Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [20]
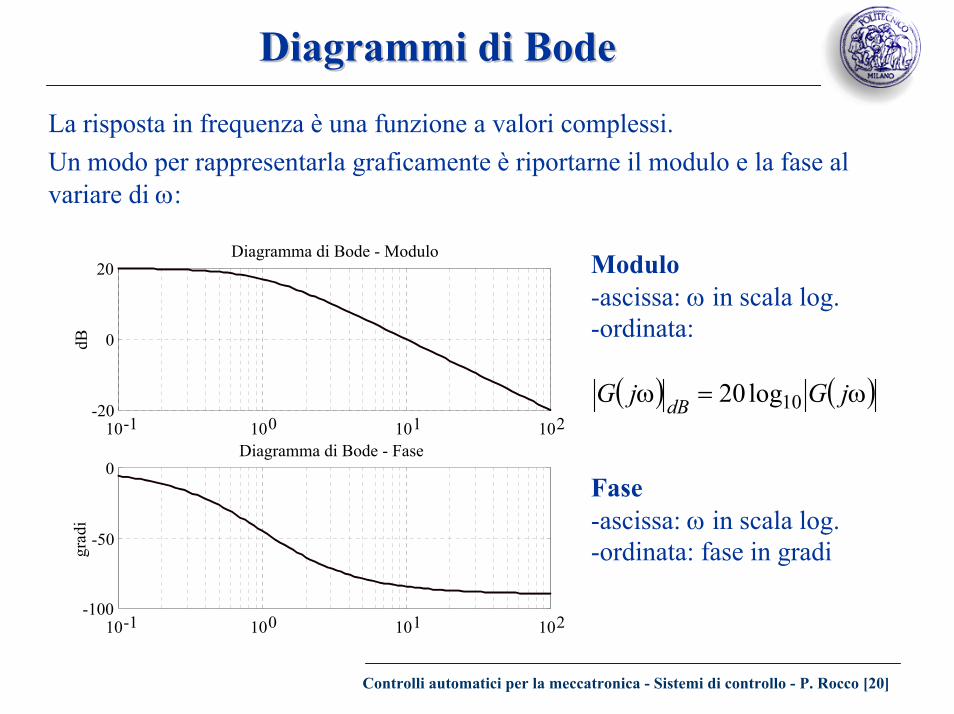
Diagrammi di Diagrammi di BodeBode
La risposta in frequenza è una funzione a valori complessi.Un modo per rappresentarla graficamente è riportarne il modulo e la fase al variare di ω:
Modulo-ascissa: ω in scala log.-ordinata:
10-1 100 101 102-20
0
20Diagramma di Bode - Modulo
dB
10-1 100 101 102-100
-50
0Diagramma di Bode - Fase
grad
i
( ) ( )ω=ω jGjG dB 10log20
Fase-ascissa: ω in scala log.-ordinata: fase in gradi
Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [21]
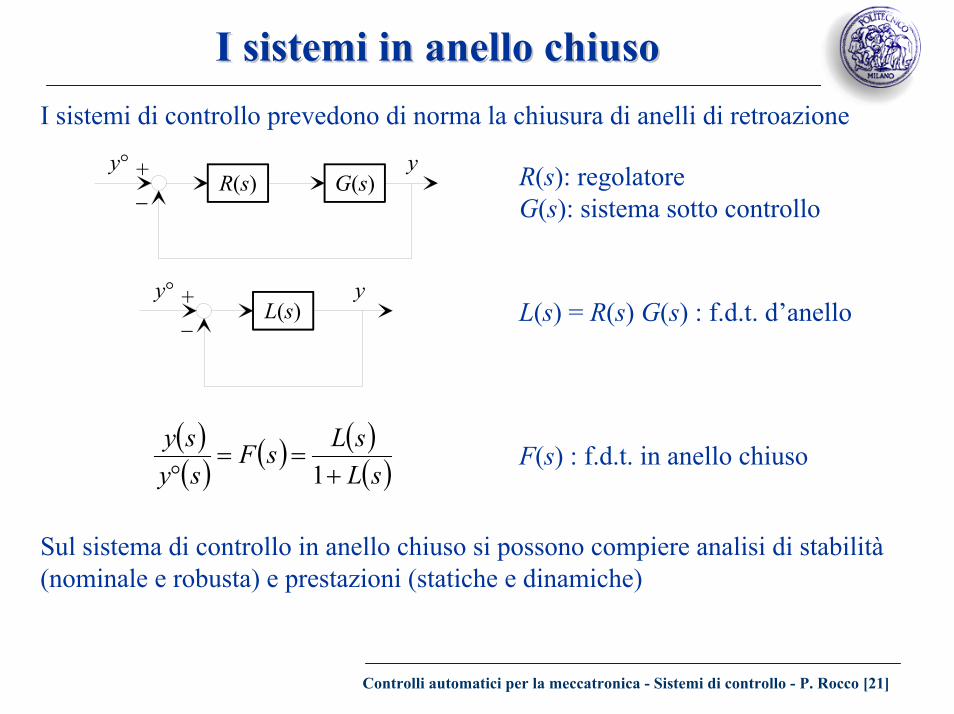
I sistemi in anello chiusoI sistemi in anello chiusoI sistemi di controllo prevedono di norma la chiusura di anelli di retroazione
y° yR(s) G(s)+
−R(s): regolatoreG(s): sistema sotto controllo
y° yL(s)+
−L(s) = R(s) G(s) : f.d.t. d’anello
( )( ) ( ) ( )
( )sLsLsF
sysy
+==
° 1F(s) : f.d.t. in anello chiuso
Sul sistema di controllo in anello chiuso si possono compiere analisi di stabilità (nominale e robusta) e prestazioni (statiche e dinamiche)
Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [22]
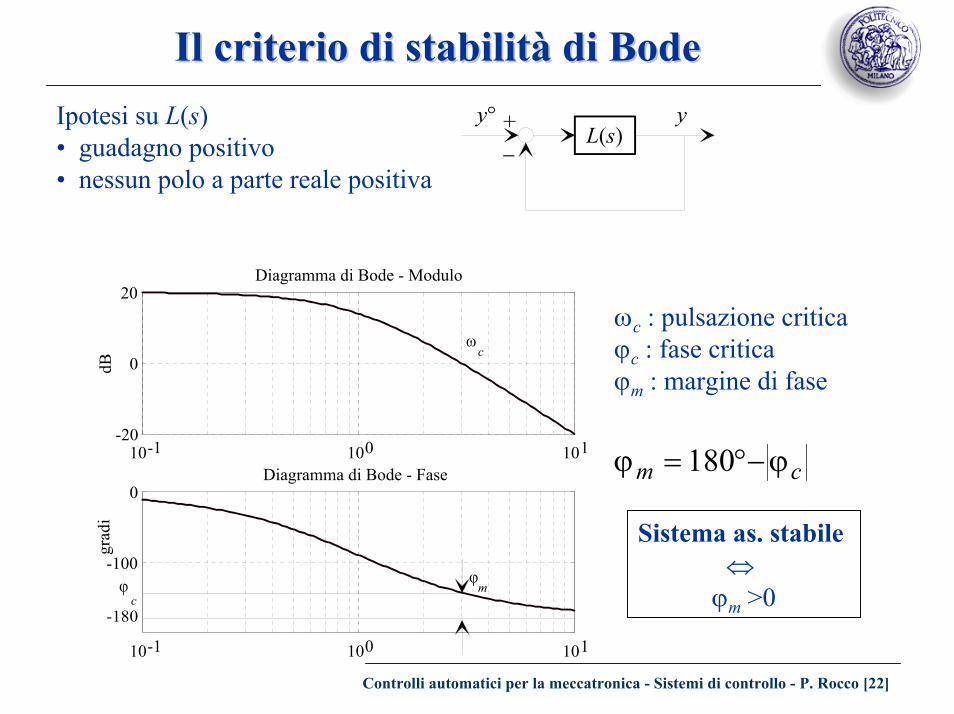
Il criterio di stabilità di Il criterio di stabilità di BodeBodeIpotesi su L(s)• guadagno positivo• nessun polo a parte reale positiva
y° yL(s)+
−
10-1 100 101-20
0
20Diagramma di Bode - Modulo
dB
10-1 100 101
-100
0Diagramma di Bode - Fase
grad
i
-180
ω
ϕ
c
mc
ϕ
ωc : pulsazione criticaϕc : fase criticaϕm : margine di fase
ϕ ϕm c= °−180
Sistema as. stabile⇔
ϕm >0
Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [23]
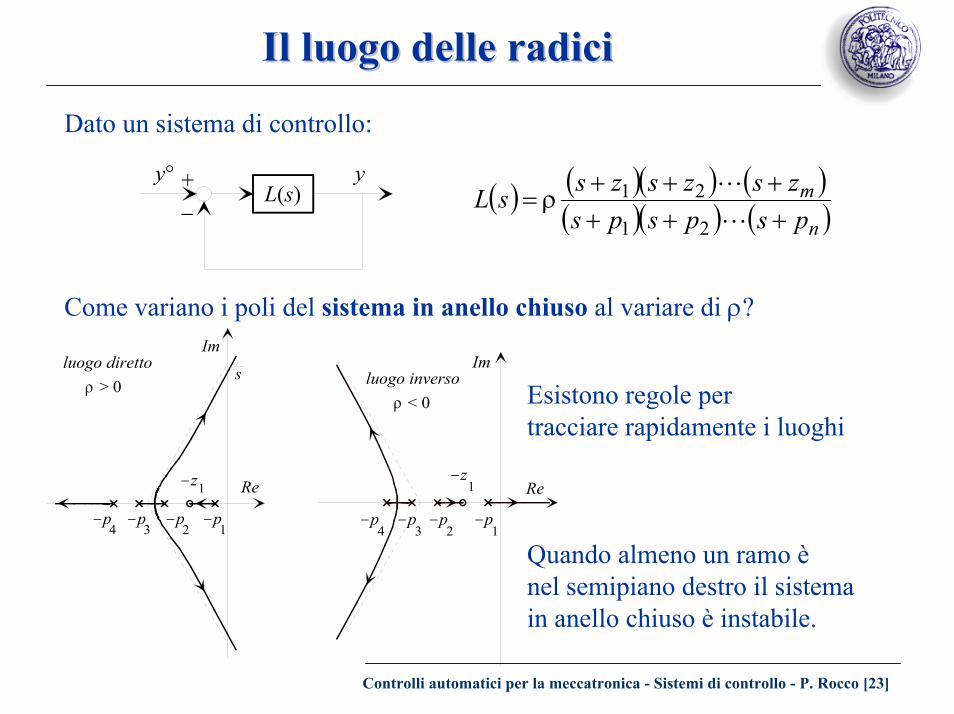
Il luogo delle radiciIl luogo delle radici
Dato un sistema di controllo:
( ) ( )( ) ( )( )( ) ( )n
mpspspszszszssL
++++++
ρ=L
L
21
21y° y
L(s)+−
Come variano i poli del sistema in anello chiuso al variare di ρ?
Re
Im
−p
−z
1
1
−p2
−p3
−p4
luogo direttos
ρ > 0
Re
Im
−p1
−p2
−p3
−p4
−z1
luogo inversoρ < 0 Esistono regole per
tracciare rapidamente i luoghi
Quando almeno un ramo ènel semipiano destro il sistemain anello chiuso è instabile.
Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [24]
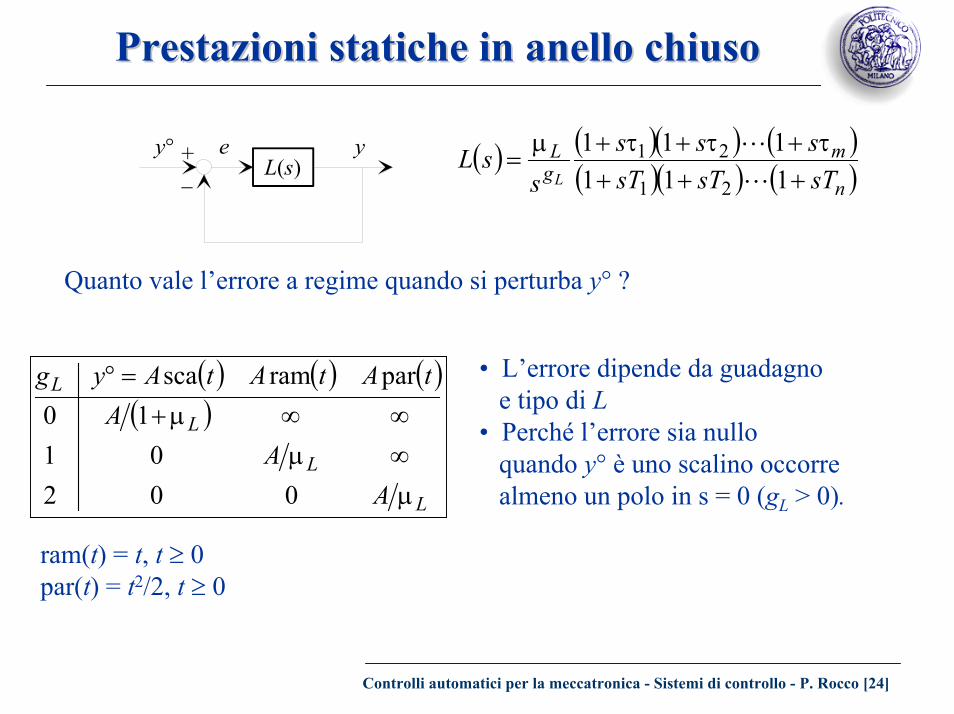
Prestazioni statiche in anello chiusoPrestazioni statiche in anello chiuso
( ) ( )( ) ( )( )( ) ( )n
mgL
sTsTsTsss
ssL
L +++τ+τ+τ+µ
=111111
21
21L
Ly° yL(s)+
−
e
Quanto vale l’errore a regime quando si perturba y° ?
• L’errore dipende da guadagnoe tipo di L
• Perché l’errore sia nulloquando y° è uno scalino occorrealmeno un polo in s = 0 (gL > 0).
( ) ( ) ( )( )
L
L
L
L
AA
AtAtAtAyg
µ∞µ∞∞µ+
=°
00201
10parramsca
ram(t) = t, t ≥ 0par(t) = t2/2, t ≥ 0

Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [25]
Prestazioni dinamiche in anello chiusoPrestazioni dinamiche in anello chiuso
y° yL(s)+
−
e
Con che rapidità y insegue y° ?Le risposte in anello chiuso oscillano o sono smorzate?
10-1 100 101-20
0
20Diagramma di Bode - Modulo
10-1 100 101
-100
0Diagramma di Bode - Fase
-180
ω
ϕ
c
mc
ϕ
Banda passante
Se ϕm è elevato le risposte sono smorzate e si esauriscono inun tempo pari a 4÷5 volte 1/ωc
Es: ωc=100 rad/s ⇒ τa ≈ 5/ωc = 50 ms
y
t1/ω
1
c
Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [26]
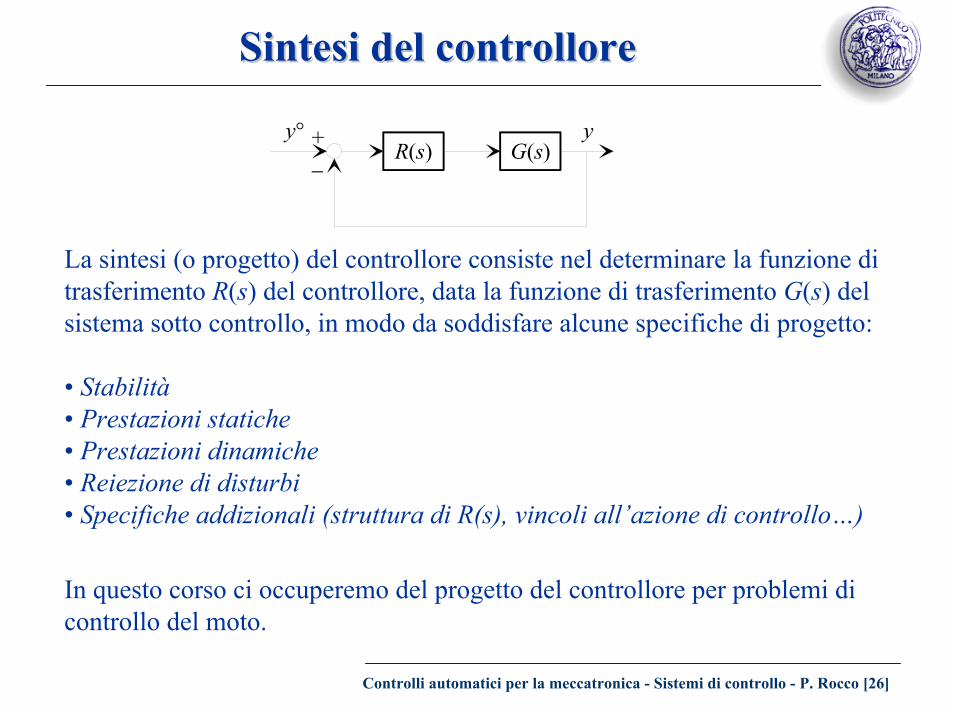
Sintesi del controlloreSintesi del controllore
y° yR(s) G(s)+
−
La sintesi (o progetto) del controllore consiste nel determinare la funzione di trasferimento R(s) del controllore, data la funzione di trasferimento G(s) del sistema sotto controllo, in modo da soddisfare alcune specifiche di progetto:
• Stabilità• Prestazioni statiche• Prestazioni dinamiche• Reiezione di disturbi• Specifiche addizionali (struttura di R(s), vincoli all’azione di controllo…)
In questo corso ci occuperemo del progetto del controllore per problemi di controllo del moto.
Controlli automatici per la meccatronica - Sistemi di controllo - P. Rocco [27]
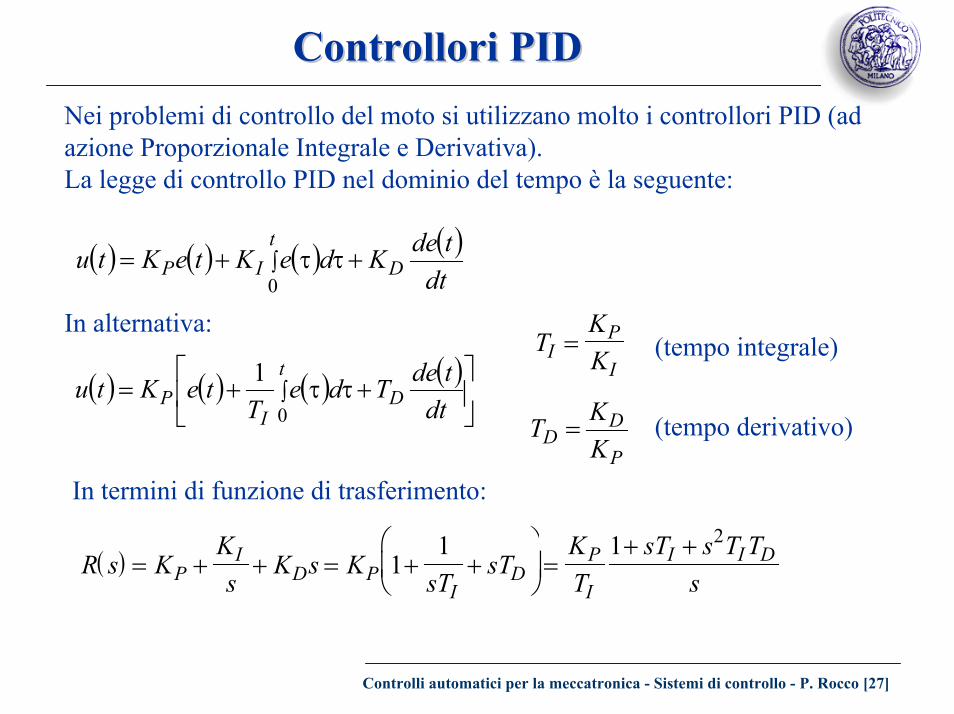
Controllori PIDControllori PIDNei problemi di controllo del moto si utilizzano molto i controllori PID (ad azione Proporzionale Integrale e Derivativa).La legge di controllo PID nel dominio del tempo è la seguente:
( ) ( ) ( ) ( )dt
tdeKdeKteKtu Dt
IP +ττ+= ∫0
In alternativa:T
KKI
P
I= (tempo integrale)
( ) ( ) ( ) ( )
+ττ+= ∫
dttdeTde
TteKtu D
t
IP
0
1
P
DD K
KT = (tempo derivativo)
In termini di funzione di trasferimento:
( )R s KKs
K s KsT
sTKT
sT s T TsP
ID P
ID
P
I
I I D= + + = + +
=
+ +1
1 1 2





























