Embed Size (px)
Citation preview
Convexity in examples, from Lie theory, symplecticgeometry and integrable Hamiltonian systems
Nguyen Tien Zung
Institut de Mathematiques de Toulouse, Universite Paul SabatierVisiting professor at Shanghai Jiao Tong University
SJTU, June 8th 2017
Based on joint work with Tudor Ratiu done at SJTU (99 pages submitted):
T. Ratiu, NTZ, Presymplectic convexity and (ir)rational polytopes,arXiv:1705.11110 (22 pages)
T. Ratiu, Ch. Wacheux, NTZ, Convexity of singular affine structuresand toric-focus integrable Hamiltonian systems, arXiv:1706.01093 (77pages)
I’ll give a series of interesting examples which are relatively easy toimagine, so that students and non-experts can understand, then indicatethe theories behind them and generalizations.
Many thanks to the School of Mathematics and the colleagues, secretariesand students here for the invitation, warm hospitality and excellentworking conditions, especially Prof. Tudor Ratiu, Prof. Jiangsu Li and Ms.Jie Hu, and also Prof. Yaokun Wu, Prof. Tongsuo Wu, Prof. XiangZhang, Ms. Jie Zhou, Ms. Shi Yi, ...
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 2 / 41
Outline of the talk
1 Gorilla selling bananas: a convex math puzzle
2 Schur-Horn theorem and generalizations
3 Local-global convexity principle
4 Non-linear convexity theorems
5 Convexity in groupoid setting
6 What do we need for convexity?
7 Toric varieties and momentum polytopes
8 Toric-focus integrable Hamiltonian systems
9 Integral affine black holes
10 Positive results on convexity with monodromy
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 3 / 41
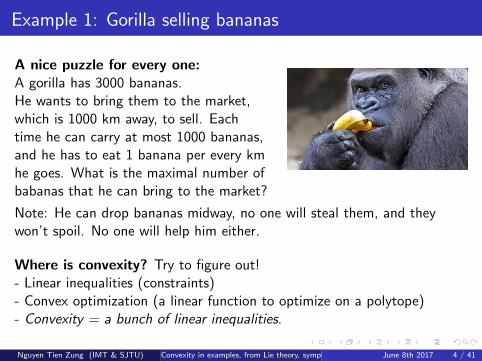
Example 1: Gorilla selling bananas
A nice puzzle for every one:A gorilla has 3000 bananas.He wants to bring them to the market,which is 1000 km away, to sell. Eachtime he can carry at most 1000 bananas,and he has to eat 1 banana per every kmhe goes. What is the maximal number ofbabanas that he can bring to the market?
Note: He can drop bananas midway, no one will steal them, and theywon’t spoil. No one will help him either.
Where is convexity? Try to figure out!- Linear inequalities (constraints)- Convex optimization (a linear function to optimize on a polytope)- Convexity = a bunch of linear inequalities.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 4 / 41
Inspirational math books for children
• Detailed solution to ”Gorilla sellingbananas” is given in the book ”Math lessonsfor Mirella”, which I wrote and publishedby Sputnik Education, of which I’m a founder.• Sputnik Educationstarted publishing inspirational math books forchildren since 2015, and has published morethan 30 books (original, or translated fromother languages including English, Russian,Protuguese), more than 100 thousand copies.• Newsletterof the European Mathematical Society hasa 3-page article in Dec. 2016 issue about us.• We’re looking for internationalcooperation, in particular with China!
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 5 / 41
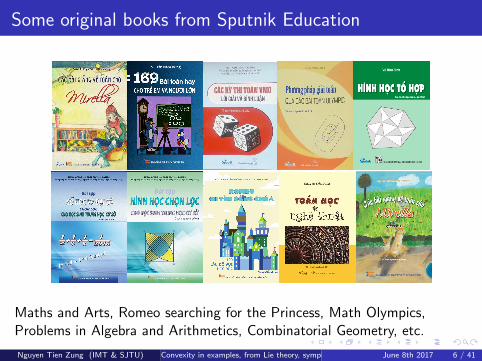
Some original books from Sputnik Education
Maths and Arts, Romeo searching for the Princess, Math Olympics,Problems in Algebra and Arithmetics, Combinatorial Geometry, etc.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 6 / 41
Example 2: Schur-Horn theorem
Theorem (Schur (1923): inclusion – Horn (1954): equality)
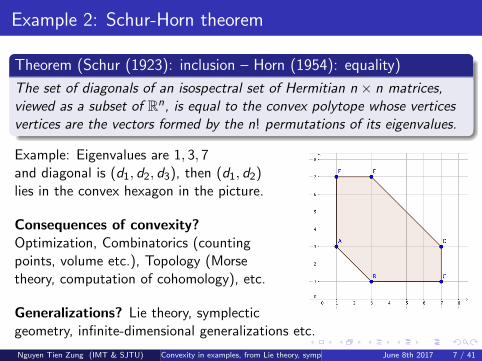
The set of diagonals of an isospectral set of Hermitian n × n matrices,viewed as a subset of Rn, is equal to the convex polytope whose verticesvertices are the vectors formed by the n! permutations of its eigenvalues.
Example: Eigenvalues are 1, 3, 7and diagonal is (d1, d2, d3), then (d1, d2)lies in the convex hexagon in the picture.
Consequences of convexity?Optimization, Combinatorics (countingpoints, volume etc.), Topology (Morsetheory, computation of cohomology), etc.
Generalizations? Lie theory, symplecticgeometry, infinite-dimensional generalizations etc.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 7 / 41
Generalizations of Schur–Horn
Theorem (Kostant 1973, Linear convexity theorem in Lie theory)
The projection of a coadjoint orbit of a connected compact Lie grouprelative to a bi-invariant inner product onto the dual of a Cartansubalgebra is the convex hull of an orbit of the Weyl group.
Schur–Horn is a particular case of linear Kostant
Theorem ( Atiyah 1982, Guillemin–Sternberg 1982, Torus actions)
Let (M2n, ω) be a 2n-dimensional symplectic manifold endowed with aHamiltonian Tk -action with momentum map J : M → Rk . Then the fibersof J are connected and J(M) is a compact convex polytope, namely theconvex hull of the image of the fixed point set of the Tk -action.
Linear Kostant is a particular case of Atiayh–Guillemin–Sternberg:symplectic manifold = coadjoint orbit with Kirillov-Kostant-Souriau form,momentum map = projection to the dual of Cartan torus.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 8 / 41
Generalizations of Schur–Horn
• Symplectic manifolds: appear in physics (cotangent bundles, phasespace of Hamiltonian systems), Lie theory (e.g., coadjoint orbits of Liealgebras), geometry (e.g., Kahler manifolds) etc. (M, ω) called symplecticif ω is a nondegenerate closed 2-form on M. Then for each function f onM there is a unique Hamiltonian vector field Xf defined by
Xf xω = df
• Momentum map J = (J1, . . . , Jk) : (M, ω)→ Rk of a Hamiltoniantorus action means that (XJ1 , . . . ,XJk ) are generators of a Tk on M.• The case of Hamiltonian actions of non-Abelian compact groups:
Theorem (Kirwan 1984)
Hamiltonian action of a compact group on a compact symplectic manifoldwith an equivariant momentum map. Then the intersection of the imageof the momentum map with a Weyl chamber is a convex polytope.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 9 / 41
Other develoments and generalizations
- Infinite dimensions: Loop groups (Atiyah–Pressley 1983), Kac–Moodygroups , Kac–Peterson 1984), Banach–Lie groups of operators on aseparable Hilbert space (Neumann 1999, 2002), area-preservingdiffeomorphisms on an annulus (Bloch–Flashka–Ratiu 1993), etc.- Local description of the momentum polytope: Brion (1987), Sjamaar(1998)- Symplectic orbifolds: Lerman–Meinrenken–Tolman–Woodward (1997-98)- Involution, ”real” convexity: Kostant’s theorem for real flag manifolds(1973), Duistermaat (1983),- Non-compact proper case: Hilgert, Neeb, and Plank (1994), Lerman(1995), Heinzner–Huckleberry (1996)- Non-Hamiltonian symplectic actions: Benoist (2002), Giacobbe (2005),Birtea–Ortega–Ratiu (2008)- Presymplectic manifolds: Lin-Sjamaar (2017), Ratiu–Zung (2017)- and so on (see Overview in Ratiu-Wacheux-Zung 2017)
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 10 / 41
Example 3: Tietze–Nakajima theorem
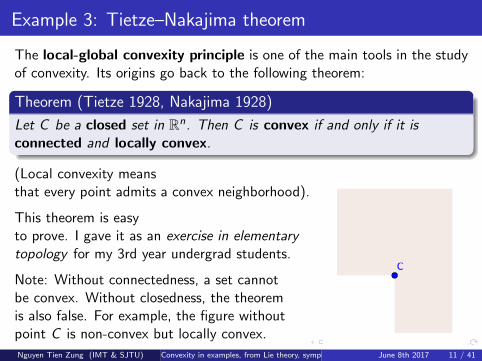
The local-global convexity principle is one of the main tools in the studyof convexity. Its origins go back to the following theorem:
Theorem (Tietze 1928, Nakajima 1928)
Let C be a closed set in Rn. Then C is convex if and only if it isconnected and locally convex.
(Local convexity meansthat every point admits a convex neighborhood).
This theorem is easyto prove. I gave it as an exercise in elementarytopology for my 3rd year undergrad students.
Note: Without connectedness, a set cannotbe convex. Without closedness, the theoremis also false. For example, the figure withoutpoint C is non-convex but locally convex.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 11 / 41
Local-global convexity principle
- Tietze–Nakajima local-global convexity principle admits many versionsand generalizations over the last century, also in infinite dimensions.- Condeveaux–Dazord–Molino (1988) were the first to use it (instead ofMorse theory) to give an elegent simple proof of symplectic convexitytheorems.- Hilgert–Neeb–Planck (1994) gave a version of it well adapted forsymplectic convexity. Since then, it became a very important tool inconvexity. In particular, Flashka–Ratiu (1996) needed it to prove convexityfor compact Poisson Lie groups (Morse theory didn’t work there).- The following simple version also works very well for symplectic convexity:
Lemma (Local-global convexity lemma, Z 2006)
Let X be a connected locally convex regular affine manifold with boundary,and φ : X → Rm a proper locally injective affine map. Then φ is injectiveand its image φ(X ) is convex in Rm.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 12 / 41
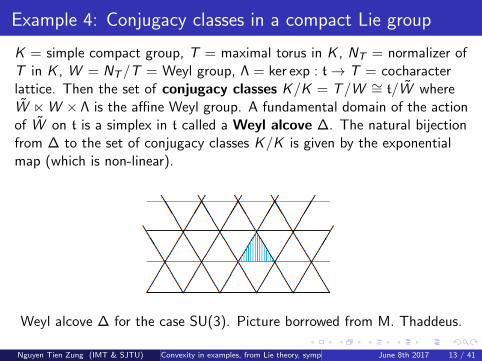
Example 4: Conjugacy classes in a compact Lie group
K = simple compact group, T = maximal torus in K , NT = normalizer ofT in K , W = NT/T = Weyl group, Λ = ker exp : t→ T = cocharacterlattice. Then the set of conjugacy classes K/K = T/W ∼= t/W whereW nW × Λ is the affine Weyl group. A fundamental domain of the actionof W on t is a simplex in t called a Weyl alcove ∆. The natural bijectionfrom ∆ to the set of conjugacy classes K/K is given by the exponentialmap (which is non-linear).
Weyl alcove ∆ for the case SU(3). Picture borrowed from M. Thaddeus.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 13 / 41

Example 5: Multiplicative Horn problem
Problem: What is the shape of the set
P = ([A], [B], [C ]) ∈ ∆3 | A,B,C ∈ K ;ABC = 1?
(Additive Horn problem: Klyashko, Knutson–Tao; multiplicative problem:Belkale–Ressayre–Agnihotri–Woodward ... in 1990s)
The case K = SU(2): P is a regular tetrahedron inside a cube. Pictureborrowed from M. Thaddeus.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 14 / 41

Other non-linear convexity results
Group-valued momentum map (twisted symplectic geometry) used inthe multiplicative Horn problem: Alekseev-Malkin-Meinrenken (1998)
Weyl (1949), Horn (1954). Let P be the set of positive definiteHermitian matrices whose determinant equals 1 and Σλ theisospectral subset of matrices in P defined by the given eigenvalues(λ1, . . . , λn) ∈ Rn. The image of the map
P 3 p 7→ (log(det p1), . . . , log(det pn)) ∈ Rn,
where pk = (pij)i ,j=1,...,k , is a convex polytope.
Kostant non-linear convexity theorm (1973) = Lie-theoreticalgeneralization of Weyl-Horn theorem. Let G be a connectedsemisimple Lie group and G = KAN = PK its Iwasawa and Cartandecomposition, respectively, with A ⊂ P. Let Oa be the K -orbit ofa ∈ A in P (by conjugation) and ρA : G → A the Iwasawa projectionρA(kan) = a. Identify A with its Lie algebra a by the exponential map.Then ρA(Oa) is the convex hull of the Weyl group orbit through a.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 15 / 41
Other non-linear convexity results
Symplectic proof Kostant nonlinear convexity theorem for Lie groups:Related to Poisson-Lie group structures and their linearization.Lu–Weinstein (1990), Lu–Ratiu (1991), Ginzburg–Weinstein (1992),Hilgert-Neeb (1998), Sleewagen (1999), Krotz-Otto (2006), etc.
Symplectic groupoids and their actions (generalization of Hamiltoniangroup actions): Coste–Dazord–Weinstein (1987), Mikami–Weinstein(1988). Quasi-symplectic groupoids and their actions: Ping Xu(2004), and Bursztyn–Crainic–Weinstein–Zhu (2004).
Zung (2006): Linearization of proper quasi-symplectic groupoids(Γ⇒ P, ω + Ω) and convexity of their Hamiltonian actions. Thisresult contains many other linear and nonlinear convexity results asspecial cases.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 16 / 41
Convexity for proper quasi-symplectic groupoid actions
Theorem (Z 2006)
Let (M, σ) be a connected quasi-Hamiltonian manifold of a properquasi-symplectic groupoid (Γ⇒ P, ω + Ω) with coad-connected isotropygroups, with a proper momentum map µ. Assume that the orbit spaceP/Γ of Γ is simply-connected, and denote by j : P/Γ→ Rk an integralaffine immersion from P/Γ to Rk . Assume that at least one of thefollowing additional conditions is satisfied:1) M is compact.2) j is an embedding and j(P/Γ) is closed in Rk .3) j is an embedding and j(P/Γ) is convex in Rk .Then the transverse momentum map µ and the composed map j µ areinjective, and the image j µ(M) = j(µ(M)/Γ) is a convex subset in Rk
with locally polyhedral boundary. (We don’t count boundary points whichlie in the closure of j(µ(M)/Γ) but not in j(µ(M)/Γ)). In particular, Mwith its integral affine structure is isomorphic to a convex subset of Rk
with locally polyhedral boundary.Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 17 / 41
Example 6: Sum of positive-definite Hamiltonians
Theorem (Weinstein 2001)
For any positive-definite quadratic Hamiltonian function H on thestandard symplectic space R2k , denote by φ(H) the k-tuple λ1 ≤ . . . ≤ λkof frequencies of H ordered non-decreasingly, i.e. H can be written asH =
∑λi (x
2i + y2
i )/2 in a canonical coordinate system. Then for any twogiven positive nondecreasing n-tuples λ = (λ1, . . . , λk) andγ = (γ1, . . . , γk), the set
Φλ,γ = φ(H1 + H2) | φ(H1) = λ, φ(H2) = γ (1)
is a closed, convex, locally polyhedral subset of Rk .
Remark: The above set Φλ,γ is closed but not bounded. For example,when k = 1 then Φλ,γ is a half-line. Weinstein’s theorem can be recoveredfrom proper symplectic groupoid setting.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 18 / 41
What do we need for ”symplectic convexity”?
• Intrinsic/transversal affine structure, which comes from thequasi/twisted/pre symplectic structure.
• Local convexity, often obtained by local normal form theorems, e.g.,Guillemin–Sternberg–Marle normal form for a symplectic tube of a groupaction), or Weinstein–Zung linearization for proper groupoids.
• Some method to go from local to global, e.g. Morse theory, butespecially the local-global convexity principle.
• Other auxilary tecnical results, e.g., connectedness, openness orclosedness of the momentum maps, symplectic involution (for dealing with”real” convexity)
• A clear definition of what does it mean to be convex in singular ornon-globally-flat cases (where things cannot be embedded into a vectorspace).
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 19 / 41
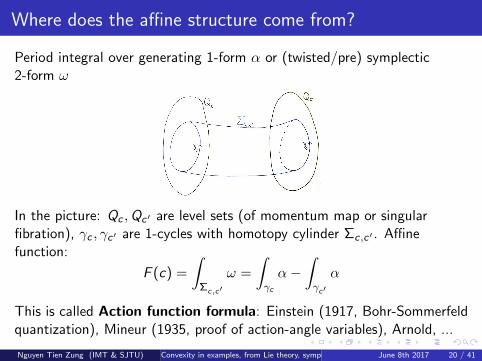
Where does the affine structure come from?
Period integral over generating 1-form α or (twisted/pre) symplectic2-form ω
In the picture: Qc ,Qc ′ are level sets (of momentum map or singularfibration), γc , γc ′ are 1-cycles with homotopy cylinder Σc,c ′ . Affinefunction:
F (c) =
∫Σc,c′
ω =
∫γc
α−∫γc′
α
This is called Action function formula: Einstein (1917, Bohr-Sommerfeldquantization), Mineur (1935, proof of action-angle variables), Arnold, ...
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 20 / 41
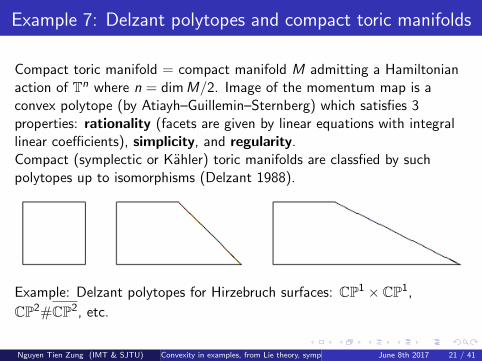
Example 7: Delzant polytopes and compact toric manifolds
Compact toric manifold = compact manifold M admitting a Hamiltonianaction of Tn where n = dimM/2. Image of the momentum map is aconvex polytope (by Atiayh–Guillemin–Sternberg) which satisfies 3properties: rationality (facets are given by linear equations with integrallinear coefficients), simplicity, and regularity.Compact (symplectic or Kahler) toric manifolds are classfied by suchpolytopes up to isomorphisms (Delzant 1988).
Example: Delzant polytopes for Hirzebruch surfaces: CP1 × CP1,
CP2#CP2, etc.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 21 / 41
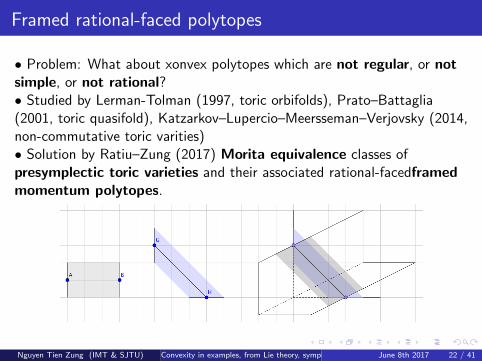
Framed rational-faced polytopes
• Problem: What about xonvex polytopes which are not regular, or notsimple, or not rational?• Studied by Lerman-Tolman (1997, toric orbifolds), Prato–Battaglia(2001, toric quasifold), Katzarkov–Lupercio–Meersseman–Verjovsky (2014,non-commutative toric varities)• Solution by Ratiu–Zung (2017) Morita equivalence classes ofpresymplectic toric varieties and their associated rational-facedframedmomentum polytopes.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 22 / 41
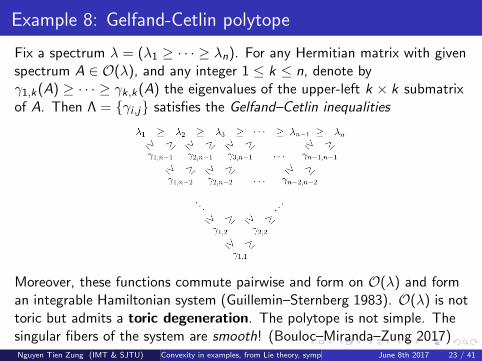
Example 8: Gelfand-Cetlin polytope
Fix a spectrum λ = (λ1 ≥ · · · ≥ λn). For any Hermitian matrix with givenspectrum A ∈ O(λ), and any integer 1 ≤ k ≤ n, denote byγ1,k(A) ≥ · · · ≥ γk,k(A) the eigenvalues of the upper-left k × k submatrixof A. Then Λ = γi ,j satisfies the Gelfand–Cetlin inequalities
Moreover, these functions commute pairwise and form on O(λ) and forman integrable Hamiltonian system (Guillemin–Sternberg 1983). O(λ) is nottoric but admits a toric degeneration. The polytope is not simple. Thesingular fibers of the system are smooth! (Bouloc–Miranda–Zung 2017)Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 23 / 41
Integrable Hamiltonian systems in the sense of Liouville
H : (M, ω)→ R: a Hamiltonian function on a symplectic manifold ofdimension 2n (n ≥ 1 is called the degree of freedom).
H1 = H is automatically a first integral of the system. Integrability ala Liouville means that there exist n − 1 additional commuting firstintegrals H2, . . . ,Hn such that the momentum map
H = (H1, . . . ,Hn) : M2n → Rn
is of rank n (i.e. the functions H1, . . . ,Hn are independent) a.e.
Base space B = connected level sets of the momentum mapH = (H1, . . . ,Hn) : M → Rn. B admits a natural singular integralaffine structure, due to the existence of action-angle variables
(Dn × Tn, ω =∑
dpi ∧ dqi )
(Arnold-Liouville-Mineur theorem, proved by Mineur in 1935).
Problem: what about the convexity of B?
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 24 / 41
Singularities of integrable Hamiltonian systems
Most singular points of the momentum map H : M2n → Rn arenondegenerate; they can be linearized locally (Williamson, Russmann,Vey, Eliasson) or near a compact orbit (Miranda–Zung).
Theorem (Local linearization, Vey–Eliasson)
If p ∈ M2n is a non-degenerate singular point of an integrable Hamiltoniansystem F = (F1, . . . ,Fn) : M → Rn, then ∃ local symplectic coordinates(x1, . . . , xn, ξ1, . . . , ξn) about p, such that Fi , qj = 0, for all i , j , where
qi = ei = x2i + ξ2
i (1 ≤ i ≤ ke) are elliptic components,
qke+i = hi = xi+keξi+ki (1 ≤ i ≤ kh) are hyperbolic components,q2i−1+ke+kh = f1
i = x2i−1+ke+khξ2i+ke+kh − x2i+ke+khξ2i−1+ke+kh
q2i+ke+kh = f2i = x2i−1+ke+khξ2i−1+ke+kh + x2i+ke+khξ2i+ke+kh
(1 ≤ i ≤ kf ) are focus-focus components,
qk+i = xi (1 ≤ i ≤ n − κ) are regular components.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 25 / 41
Semi-local structure of nondegenerate singularities
Theorem (Zung 1996)
N = non-degenerate singular fiber of corank κ and Williamson typek = (ke , kh, kf ) in an integrable Hamiltonian system given by a propermomentum map H : M2n → Rn. Then ∃ neighborhood U(N) of N inM2n, saturated by the fibers of the system, such that:(i) ∃ an effective Hamiltonian action of Tke+kf +(n−κ) on U(N) whichpreserves the system. This number ke + kf + (n − κ) is maximal possible.(ii) (U(N), associated Lagrangian torus fibration) is homeomorphic to thequotient of a direct product of elementary non-degenerate singularities anda regular Lagrangian torus foliation of the type
(U(Tn−κ),Lr )× (P2(Ne1 ),Le1)× · · · × (P2(Ne
ke ,Leke )×
×(P2h(Nh
1 ,Lh1)×· · ·×(P2(Nhkh
),Lhkh)×(P4(N f1 ),Lf1)×· · ·×(P4(N f
kf),Lfkf )
by a free action of a finite group Γ.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 26 / 41
Toric-focus systems
A toric-focus system is an integrable Hamiltonian system whosesingularities are nondegenerate and have no hyperbolic component,onlyelliptic and/or focus-focus components. Why toric-focus?
Can be found everywhere in physical systems, e.g.: sphericalpendulum, Lagrange top, spin systems, focusing NLS equation,Jaynes–Cummings–Gaudin, etc. Related also to Lagrangian fibrationson Calabi–Yau (mirror symmetry), tropical affine structures.
Base spaces are still manifolds (with hyperbolic singularities the basespaces are not manifolds). The integral affine structure has focussingularities, but one can still talk about convexity.
Studied by many people. Duistermaat, Bates–Cushman, Babelon,Sadovskii-Zhilinskii, Hansmann–Broer, Leung–Symington,Sepe–Holoch–Sabatini, Vu Ngoc–Pelayo–Ratiu, Wacheux, etc.
Special cases: semi-toric (additional condition on torus actions).
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 27 / 41
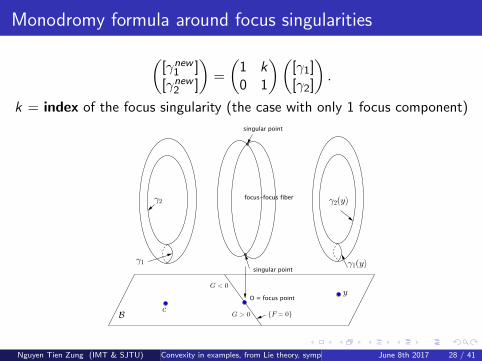
Monodromy formula around focus singularities
([γnew1 ][γnew2 ]
)=
(1 k0 1
)([γ1][γ2]
).
k = index of the focus singularity (the case with only 1 focus component)
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 28 / 41
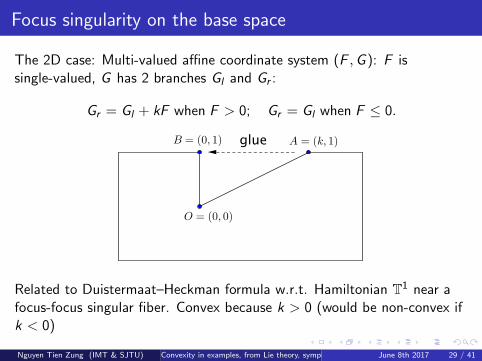
Focus singularity on the base space
The 2D case: Multi-valued affine coordinate system (F ,G ): F issingle-valued, G has 2 branches Gl and Gr :
Gr = Gl + kF when F > 0; Gr = Gl when F ≤ 0.
Related to Duistermaat–Heckman formula w.r.t. Hamiltonian T1 near afocus-focus singular fiber. Convex because k > 0 (would be non-convex ifk < 0)
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 29 / 41
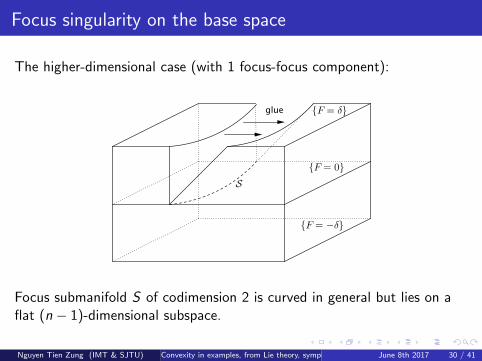
Focus singularity on the base space
The higher-dimensional case (with 1 focus-focus component):
Focus submanifold S of codimension 2 is curved in general but lies on aflat (n − 1)-dimensional subspace.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 30 / 41
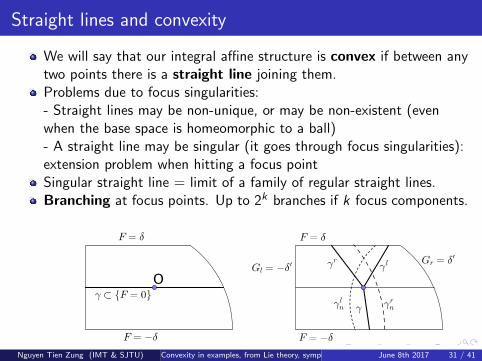
Straight lines and convexity
We will say that our integral affine structure is convex if between anytwo points there is a straight line joining them.Problems due to focus singularities:- Straight lines may be non-unique, or may be non-existent (evenwhen the base space is homeomorphic to a ball)- A straight line may be singular (it goes through focus singularities):extension problem when hitting a focus pointSingular straight line = limit of a family of regular straight lines.Branching at focus points. Up to 2k branches if k focus components.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 31 / 41
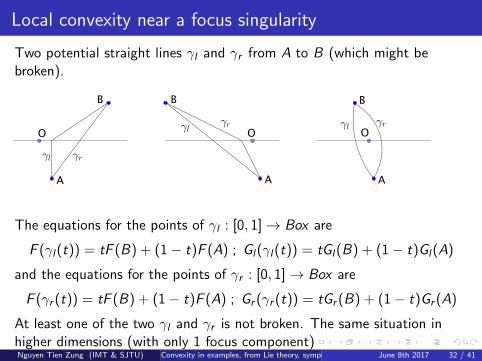
Local convexity near a focus singularity
Two potential straight lines γl and γr from A to B (which might bebroken).
The equations for the points of γl : [0, 1]→ Box are
F (γl(t)) = tF (B) + (1− t)F (A) ; Gl(γl(t)) = tGl(B) + (1− t)Gl(A)
and the equations for the points of γr : [0, 1]→ Box are
F (γr (t)) = tF (B) + (1− t)F (A) ; Gr (γr (t)) = tGr (B) + (1− t)Gr (A)
At least one of the two γl and γr is not broken. The same situation inhigher dimensions (with only 1 focus component)Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 32 / 41
Challange posed by monodromy
Phenomenon: Possible loss of convexity due to complicated monodromy(created by many focus points, or higher order focus points, or two disjointfocus curves, etc.)
Local-global convexity principle no longer valid when the monodromyis complicated.
Existence of non-convex integral affine S2 (which is ocally convex).
Non-convexity examples near focus2 points.
Non-convexity examples in 3D with two focus curves.
Under some natural additional conditions, there are still positiveglobal convexity results
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 33 / 41
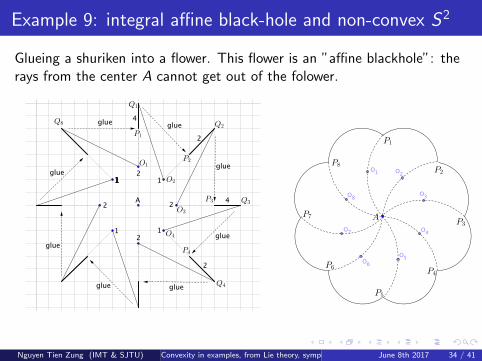
Example 9: integral affine black-hole and non-convex S2
Glueing a shuriken into a flower. This flower is an ”affine blackhole”: therays from the center A cannot get out of the folower.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 34 / 41
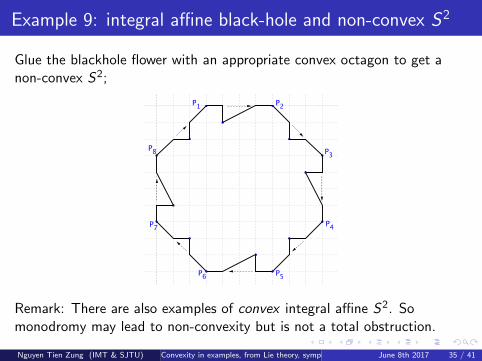
Example 9: integral affine black-hole and non-convex S2
Glue the blackhole flower with an appropriate convex octagon to get anon-convex S2;
Remark: There are also examples of convex integral affine S2. Somonodromy may lead to non-convexity but is not a total obstruction.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 35 / 41
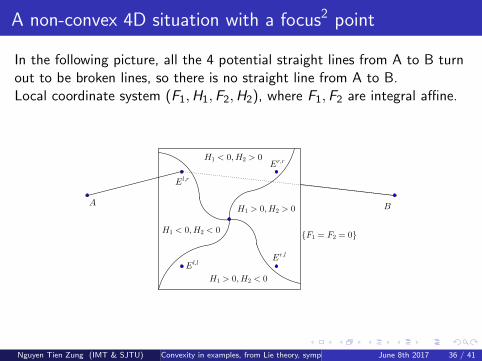
A non-convex 4D situation with a focus2 point
In the following picture, all the 4 potential straight lines from A to B turnout to be broken lines, so there is no straight line from A to B.Local coordinate system (F1,H1,F2,H2), where F1,F2 are integral affine.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 36 / 41
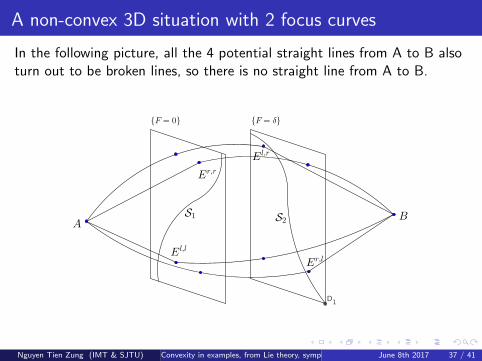
A non-convex 3D situation with 2 focus curves
In the following picture, all the 4 potential straight lines from A to B alsoturn out to be broken lines, so there is no straight line from A to B.
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 37 / 41
Global convexity of 2D focus-toric systems: compact case
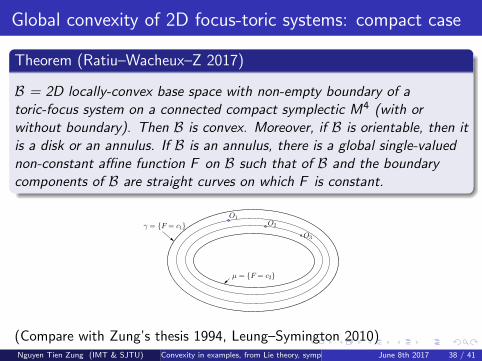
Theorem (Ratiu–Wacheux–Z 2017)
B = 2D locally-convex base space with non-empty boundary of atoric-focus system on a connected compact symplectic M4 (with orwithout boundary). Then B is convex. Moreover, if B is orientable, then itis a disk or an annulus. If B is an annulus, there is a global single-valuednon-constant affine function F on B such that of B and the boundarycomponents of B are straight curves on which F is constant.
(Compare with Zung’s thesis 1994, Leung–Symington 2010)Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 38 / 41
Global convexity of 2D focus-toric systems: proper case
Theorem
Let B be the 2-dimensional base space of a toric-focus integrableHamiltonian system on a connected, non-compact, symplectic, 4-manifoldwithout boundary. Assume:
(i) the system has elliptic singularities (i.e., the boundary of B is notempty);
(ii) the number of focus points in B is finite and the interior of B ishomeomorphic to an open disk;
(iii) B is proper.
Then B is convex (in its own underlying affine structure).
Remark: Without the properness condition the theorem would fail(Pelayo–Ratiu–Vu Ngoc: cartography of different proper and non-propersemi-toric systems).
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 39 / 41
Global convexity of semi-toric systems in higher dimensions
Theorem
Let B be the base space of a toric-focus integrable Hamiltonian systemwith n degrees of freedom on a connected compact symplectic manifoldM. Assume that the system admits a global Hamiltonian Tn−1-action.Then B is convex.
Theorem
Let B be the n-dimensional base space of a toric-focus system on aconnected, non-compact, symplectic, 2n-manifold without boundary s.t.:
(i) The system admits a global Hamiltonian Tn−1-action;
(ii) the set of focus points in B is compact;
(iii) the interior of B is homeomorphic to an open ball in Rn;
(iv) B is proper.
Then B is convex (in its own underlying affine structure).Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 40 / 41

THANK YOU!
Nguyen Tien Zung (IMT & SJTU) Convexity in examples, from Lie theory, symplectic geometry and integrable Hamiltonian systemsJune 8th 2017 41 / 41












![massuyea.perso.math.cnrs.frarXiv:0712.0093v2 [math.GT] 6 Jul 2009 SYMPLECTIC JACOBI DIAGRAMS AND THE LIE ALGEBRA OF HOMOLOGY CYLINDERS KAZUO HABIRO AND GWENA´ EL MASSUYEAU¨ Abstract](https://img.pdfslide.net/doc/110x75/6041d33dd3e7aa7e1b08a9f0/arxiv07120093v2-mathgt-6-jul-2009-symplectic-jacobi-diagrams-and-the-lie-algebra.jpg)
















