Embed Size (px)
Citation preview

Local optimization in cooperative agents networks
Dott.ssa Meritxell VinyalsUniversity of Verona
Seville, 30 de Junio de 2011jueves 28 de julio de 2011

Outline
. Introduction and domains of interest
. Open problems and approaches
jueves 28 de julio de 2011

Outline
. Introduction and domains of interest
. Open problems and approaches
jueves 28 de julio de 2011

Many real-world problems can be modeled as a network of cooperative agents that have to coordinate their actions in order to
optimize the system performance
Traffic light control
Energy-efficientsensor networksSmart (electricity) grid
Motivating domains
jueves 28 de julio de 2011

Traffic light control
Energy-efficientsensor networksSmart (electricity) grid
a1
a0 a2
Motivating domains
jueves 28 de julio de 2011

Traffic light control
Energy-efficientsensor networksSmart (electricity) grid
Motivating domainsIntroductionApplications
Open problems
SchedulingSmart gridTraffic light synchronization
DCOPs for smart grid: Configuration of power networks
[Petcu & Faltings, 2008]
How sinks configure the network by enabling transmission lines suchthat is (a) cycle-free and (b) the amount of power lost is minimized.
Meritxell Vinyals Multi-Agents systems for Distributed Optimization
IntroductionApplications
Open problems
SchedulingSmart gridTraffic light synchronization
DCOPs for smart grid: Configuration of power networks
[Petcu & Faltings, 2008]
How sinks configure the network by enabling transmission lines suchthat is (a) cycle-free and (b) the amount of power lost is minimized.
Meritxell Vinyals Multi-Agents systems for Distributed Optimization
IntroductionApplications
Open problems
SchedulingSmart gridTraffic light synchronization
DCOPs for smart grid: Configuration of power networks
[Petcu & Faltings, 2008]
How sinks configure the network by enabling transmission lines suchthat is (a) cycle-free and (b) the amount of power lost is minimized.
Meritxell Vinyals Multi-Agents systems for Distributed Optimization
jueves 28 de julio de 2011

Traffic light control
Energy-efficientsensor networksSmart (electricity) grid
a1
a0 a2
Motivating domains
jueves 28 de julio de 2011

Traffic light control
Energy-efficientsensor networksSmart (electricity) grid
a1
a0 a2
Motivating domains
jueves 28 de julio de 2011

Optimization with agents
a1
a0 a2
Each agent can choose from a set of discrete actions
Each agent sensor has two actions:
Turn on Turn off
Each agent sensor has two actions:jueves 28 de julio de 2011

Optimization with agents
a1
a0 a2
Agents report individual rewards for their actions
Each agent sensor has two actions:
1/4$
1/2$ 1/2$
Agent sensors report a reward to turn off (e.g. which may vary depending on the remaining battery)
jueves 28 de julio de 2011

Optimization with agents
a1
a0 a2
An edge stands for two agents that need to coordinate in order to receive a joint reward
Each agent sensor has two actions:
There is a reward if the region between two sensors is sampled by at least one sensor
If two neighboring agents select different actions they receive 1$
jueves 28 de julio de 2011

Optimization with agents
a1
a0 a2
An edge stands for two agents that need to coordinate in order to receive a joint reward
Each agent sensor has two actions:
There is a reward if the region between two sensors is sampled by at least one sensor
1$
jueves 28 de julio de 2011

Optimization with agents
a1
a0 a2
An edge stands for two agents that need to coordinate in order to receive a joint reward
Each agent sensor has two actions:
There is a reward if the region between two sensors is sampled by at least one sensor
1$
jueves 28 de julio de 2011

Optimization with agents
a1
a0 a2
Each agent sensor has two actions:
The goal is to distributedly find a set of actions that maximize the overall reward
1$
• Optimal configuration 3$
1$
1/2$ 1/2$
jueves 28 de julio de 2011

Disaster management Traffic light control
Energy-efficientsensor networksSmart (electricity) grid
a1
a0 a2
Motivating domains
jueves 28 de julio de 2011

Traffic light control
Coordinate traffic lights so that vehicles can traverse an arterial in one traffic direction, keeping a specified speed without stopping (green waves)
Old times: isolated traffic lights
Future generation:social traffic lights
jueves 28 de julio de 2011

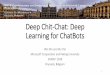
Traffic light control [R. Junges and A. L. C. Bazzan, 2010] uses a multi-agent system approach in which:22 Chapter 2. Problem definition
1st. st.
2nd. st.
3rd.
st.
4th.
st.
(a) Traffic light synchronization
problem.
x0 x1
x2 x3
r13 � ⊕� 0 1
⊕ 32 2
r02 � ⊕� 1
232
⊕ 1 2
r01 � ⊕� 0
12
⊕ 132
r23 � ⊕� 0
12
⊕ 132
(b) DCOP model of the traffic light synchronization
problem.
Figure 2.4: An traffic light synchronization problem. (a) The traffic light synchroniza-
tion problem: there are four crossings with an square connection. (b) The DCOP model:
each crossing has an associated variable that models the feasible plans for the crossing.
sensors s1 and s2 in order to avoid redundant measurements and minimise energy con-
sumption. Figure 2.3(b) shows a DCOP model of the problem. The variables represent
sensors and each variable’s domain is composed of sensor’s actions (to turn on or off).
Unary relations stand for sensors costs, e.g. unary relation r0 encodes a reward of12
for sensor x0 to turn on. Binary relations stand for sensors dependencies, relation r01
encodes the rewards for the joint configurations of sensors s0 and s1.
As argued in chapter 1 for the specific case of environmental monitoring, this kind
of sensor networks are typically composed of a large number of small-sized battery-
operated sensors equipped with limited data processing and communication capabilities
and hence, coordination to the optimal is in general not affordable under such severe
conditions. Moreover, information gathering is a domain that allows to select among
different on sensor positions or formations to trade-off quality versus cost.
2.3.3 Traffic light controlConsider the problem of synchronizing traffic lights in a city. Synchronization here
means that adjacent traffic lights will be coordinated so that vehicles can traverse an
arterial in one traffic direction, keeping a specific speed, without stopping. Each traffic
light has a library of plans, each allowing the synchronization in different traffic direc-
tion. The specific objective of the scenario is to find the best signal plan configuration
for the traffic lights.
This problem of traffic light synchronisation is formalized in (Junges and Bazzan,
2008) as a DCOP Φ = �A,X ,D,R� such that:
• X = {x1, . . . , xn} and A = {a1, . . . , an} are the sets of variables/agents, where
n is the number of crossings;
jueves 28 de julio de 2011

Traffic light control [R. Junges and A. L. C. Bazzan, 2010] uses a multi-agent system approach in which:22 Chapter 2. Problem definition
1st. st.
2nd. st.
3rd.
st.
4th.
st.
(a) Traffic light synchronization
problem.
x0 x1
x2 x3
r13 � ⊕� 0 1
⊕ 32 2
r02 � ⊕� 1
232
⊕ 1 2
r01 � ⊕� 0
12
⊕ 132
r23 � ⊕� 0
12
⊕ 132
(b) DCOP model of the traffic light synchronization
problem.
Figure 2.4: An traffic light synchronization problem. (a) The traffic light synchroniza-
tion problem: there are four crossings with an square connection. (b) The DCOP model:
each crossing has an associated variable that models the feasible plans for the crossing.
sensors s1 and s2 in order to avoid redundant measurements and minimise energy con-
sumption. Figure 2.3(b) shows a DCOP model of the problem. The variables represent
sensors and each variable’s domain is composed of sensor’s actions (to turn on or off).
Unary relations stand for sensors costs, e.g. unary relation r0 encodes a reward of12
for sensor x0 to turn on. Binary relations stand for sensors dependencies, relation r01
encodes the rewards for the joint configurations of sensors s0 and s1.
As argued in chapter 1 for the specific case of environmental monitoring, this kind
of sensor networks are typically composed of a large number of small-sized battery-
operated sensors equipped with limited data processing and communication capabilities
and hence, coordination to the optimal is in general not affordable under such severe
conditions. Moreover, information gathering is a domain that allows to select among
different on sensor positions or formations to trade-off quality versus cost.
2.3.3 Traffic light controlConsider the problem of synchronizing traffic lights in a city. Synchronization here
means that adjacent traffic lights will be coordinated so that vehicles can traverse an
arterial in one traffic direction, keeping a specific speed, without stopping. Each traffic
light has a library of plans, each allowing the synchronization in different traffic direc-
tion. The specific objective of the scenario is to find the best signal plan configuration
for the traffic lights.
This problem of traffic light synchronisation is formalized in (Junges and Bazzan,
2008) as a DCOP Φ = �A,X ,D,R� such that:
• X = {x1, . . . , xn} and A = {a1, . . . , an} are the sets of variables/agents, where
n is the number of crossings;
Each agent is in charge of a crossing
jueves 28 de julio de 2011

Traffic light control [R. Junges and A. L. C. Bazzan, 2010] uses a multi-agent system approach in which:22 Chapter 2. Problem definition
1st. st.
2nd. st.
3rd.
st.
4th.
st.
(a) Traffic light synchronization
problem.
x0 x1
x2 x3
r13 � ⊕� 0 1
⊕ 32 2
r02 � ⊕� 1
232
⊕ 1 2
r01 � ⊕� 0
12
⊕ 132
r23 � ⊕� 0
12
⊕ 132
(b) DCOP model of the traffic light synchronization
problem.
Figure 2.4: An traffic light synchronization problem. (a) The traffic light synchroniza-
tion problem: there are four crossings with an square connection. (b) The DCOP model:
each crossing has an associated variable that models the feasible plans for the crossing.
sensors s1 and s2 in order to avoid redundant measurements and minimise energy con-
sumption. Figure 2.3(b) shows a DCOP model of the problem. The variables represent
sensors and each variable’s domain is composed of sensor’s actions (to turn on or off).
Unary relations stand for sensors costs, e.g. unary relation r0 encodes a reward of12
for sensor x0 to turn on. Binary relations stand for sensors dependencies, relation r01
encodes the rewards for the joint configurations of sensors s0 and s1.
As argued in chapter 1 for the specific case of environmental monitoring, this kind
of sensor networks are typically composed of a large number of small-sized battery-
operated sensors equipped with limited data processing and communication capabilities
and hence, coordination to the optimal is in general not affordable under such severe
conditions. Moreover, information gathering is a domain that allows to select among
different on sensor positions or formations to trade-off quality versus cost.
2.3.3 Traffic light controlConsider the problem of synchronizing traffic lights in a city. Synchronization here
means that adjacent traffic lights will be coordinated so that vehicles can traverse an
arterial in one traffic direction, keeping a specific speed, without stopping. Each traffic
light has a library of plans, each allowing the synchronization in different traffic direc-
tion. The specific objective of the scenario is to find the best signal plan configuration
for the traffic lights.
This problem of traffic light synchronisation is formalized in (Junges and Bazzan,
2008) as a DCOP Φ = �A,X ,D,R� such that:
• X = {x1, . . . , xn} and A = {a1, . . . , an} are the sets of variables/agents, where
n is the number of crossings;
The decision of an agent is composed of a set of signals plans for the traffic lights in
the crossing
⊗⊕
jueves 28 de julio de 2011

Traffic light control [R. Junges and A. L. C. Bazzan, 2010] uses a multi-agent system approach in which:
Two agents in two adjacent crossings need to coordinate
their plans
jueves 28 de julio de 2011

Traffic light control [R. Junges and A. L. C. Bazzan, 2010] uses a multi-agent system approach in which:
The reward to execute two plans in neighboring crossings is in
function of:(1) the degree in which these two
plans synchronize(II) the volume of vehicles in that
direction
jueves 28 de julio de 2011

Traffic light control [R. Junges and A. L. C. Bazzan, 2010] uses a multi-agent system approach in which:
⊗⊕
⊕2$ 1$2$ 0$
⊗
jueves 28 de julio de 2011

Smart grid. The current hierarchical, centrally-controlled grid is obsolete. Problems on scalability, efficiency and integration of green energies. Most of the decisions about the operation of a power system are made in a centralized fashion
jueves 28 de julio de 2011

Smart grid. Centralized control is replaced with decentralized control:
. efficiency and scalability . complex control mechanisms needed
. Introduction of intelligence at all levels, especially at lower levels, to provide timely and accurate control responses
jueves 28 de julio de 2011

Smart grid
. Home/neighborhood level
. Distribution level
. Transmission level
jueves 28 de julio de 2011

Smart grid
. Home/neighborhood level
. Coordinate home appliances to reduce the peak
. Create coalitions of energy profiles to reduce the peak
jueves 28 de julio de 2011

Smart grid. Transmission level
How sinks configure the network by enabling transmission lines such that are: (a) cycle free; and (b) the amount of power lost is minimized.
[Petcu & Faltings, 2008]
IntroductionApplications
Open problems
SchedulingSmart gridTraffic light synchronization
DCOPs for smart grid: Configuration of power networks
[Petcu & Faltings, 2008]
How sinks configure the network by enabling transmission lines suchthat is (a) cycle-free and (b) the amount of power lost is minimized.
Meritxell Vinyals Multi-Agents systems for Distributed Optimization
IntroductionApplications
Open problems
SchedulingSmart gridTraffic light synchronization
DCOPs for smart grid: Configuration of power networks
[Petcu & Faltings, 2008]
How sinks configure the network by enabling transmission lines suchthat is (a) cycle-free and (b) the amount of power lost is minimized.
Meritxell Vinyals Multi-Agents systems for Distributed Optimization
jueves 28 de julio de 2011

Outline
. Introduction and domains of interest
. Open problems and approaches
jueves 28 de julio de 2011

Maxims for researchersFirst takes all the credit, second gets nothing
jueves 28 de julio de 2011

Maxims for researchersEither you are the first or you are the best in the crowd
jueves 28 de julio de 2011

The moral
Identify open problems, preferably with few contributions
jueves 28 de julio de 2011

Open problems
Trade-off quality vs cost
Dynamism
Uncertainty
Hierarchical optimization
Non-cooperativeagents
jueves 28 de julio de 2011

Open problems
Trade-off quality vs cost
Dynamism
Uncertainty
Hierarchical optimization
Non-cooperativeagents
jueves 28 de julio de 2011

Optimality: the idealistic (but usually impractical) term
Researchers have proposed optimal algorithms that aim to minimize the communication/computation needed by agents to find their optimal actions
All of them have an exponential cost (either in size/number of messages/computation)
DPOP [A. Petcu & B. Faltings, 2005] ADOPT [Modi et al., 2005] OptAPO [R. Mailler & V. Lesser, 2004] Action-GDL [M. Vinyals et al., 2010]
jueves 28 de julio de 2011

Optimality: the idealistic (but usually impractical) term
Smart grid Traffic light control Energy-efficientsensor networks
Time Scale Communication/Computation
In many domains the price of optimality is simply not affordable
jueves 28 de julio de 2011

Optimality: the idealistic (but usually impractical) term
Smart grid Traffic light control Energy-efficientsensor networks
Time Scale Communication/Computation
In many domains the price of optimality is simply not affordable
jueves 28 de julio de 2011

Optimality: the idealistic (but usually impractical) term
Smart grid Traffic light control Energy-efficientsensor networks
Time Scale Communication/Computation
In many domains the price of optimality is simply not affordable
jueves 28 de julio de 2011

Suboptimality: low-cost at not guarantees
Researchers have also proposed suboptimal algorithms:
. Return fast good solutions in average . Small amount of communication/computation per agent
But not guarantee ....
DSA [Yokoo & Hirayama, 1996] DBA [Fitzpatrick & Meeterns., 2005] Max-Sum [Farinelli et al., 2009]
jueves 28 de julio de 2011

Suboptimality: low-cost at not guarantees
Although suboptimal coordination returns good solutions on average ....
a1
a0 a2
1/4$
1/2$
2.75$(Optimal configuration 3$)
1$
1$
jueves 28 de julio de 2011

Suboptimality: low-cost at not guarantees
... it can also converge to very poor solutions
1.25$(Optimal configuration 3$)
a1
a0 a2
1/4$
1/2$1/2$
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees
A quality guarantee ensures that the value of a solution is within a given distance δ from the optimal one
δ ≤ solution valueoptimal value
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees
A quality guarantee ensures that the value of a solution is within a given distance δ from the optimal one
δ= 50%
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees
A quality guarantee ensures that the value of a solution is within a given distance δ from the optimal one
91%
a1
a0 a2
1/4$
1/2$
2.75$
1$
1$
δ= 50%
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees
A quality guarantee ensures that the value of a solution is within a given distance δ from the optimal one
δ= 50%
91%
δ= 50%
41%
a1
a0 a2
1/4$
1/2$
2.75$
1$
1$
δ= 50%
1.25$
a1
a0 a2
1/4$
1/2$1/2$
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees
Quality guarantees allow system designer to evaluate different design alternatives: algorithm selection
e.g. in traffic control Algorithm A Algorithm B
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees
Quality guarantees allow system designer to evaluate different design alternatives: algorithm selection
e.g. in traffic control Algorithm A Algorithm B
The best solution varies with traffic conditions ....
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees
Quality guarantees allow system designer to evaluate different design alternatives: algorithm selection
e.g. in traffic control Algorithm A Algorithm B
... but the structure of dependencies is fixed and
determined by the particular urban grid
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees
Quality guarantees allow system designer to evaluate different design alternatives: algorithm selection
e.g. in traffic control
Algorithm A Algorithm B50% 25%
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees
Quality guarantees allow system designer to evaluate different design alternatives: algorithm selection
e.g. in traffic control
Algorithm A Algorithm B20% 40%
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees
Quality guarantees allow system designer to evaluate different design alternatives: configuration selection
e.g. in sensor networks
We can select a placement for
sensors
30%
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees
Quality guarantees allow system designer to evaluate different design alternatives: configuration selection
e.g. in sensor networks
We can select a placement for
sensors
50%
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees: approaches
• Region optimal algorithms [AAMAS, 2011]
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees: approaches
A solution is region optimal when its value cannot be improved by changing the decision of any group of agents in the region
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees: approaches
A solution is region optimal when its value cannot be improved by changing the decision of any group of agents in the region
a0
a1 a2
a3
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees: approaches
A solution is region optimal when its value cannot be improved by changing the decision of any group of agents in the region
a0
a1 a2
a3
{a0, a1}
Groups in the region
{a0, a2}{a0, a3}
{a1, a2}{a1, a3}
{a2, a3}
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees: approaches
A solution is region optimal when its value cannot be improved by changing the decision of any group of agents in the region
a0
a1 a2
a3
{a1, a2, a3}{a0, a3}
{a0, a1, a2}
Groups in the region
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees: approaches
Region optimality [AAMAS, 2011] allows to assess quality guarantees for any region optimal
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees: approaches
a0
a1 a2
a3
The quality of any region optimal in this region in any
problem is guaranteed to be at least 33% the value of the
optimal solution
Region optimality [AAMAS, 2011] allows to assess quality guarantees for any region optimal
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees: approaches
a0
a1 a2
a3
The quality of any region optimal in this region in any
problem with this dependency graph is guaranteed to be at least 50% the value of the
optimal solution
Region optimality [AAMAS, 2011] allows to assess quality guarantees for any region optimal
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees: approaches
a0
a1 a2
a3
The quality of any region optimal in this region in any
problem with this dependency graph and reward structure is guaranteed to be at least 75%
the value of the optimal solution
Region optimality [AAMAS, 2011] allows to assess quality guarantees for any region optimal
$ $
$ $
$
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees: approaches
So far we have characterized quality guarantees for region optimal solutions but ...
how agents find such region optimal solutions?
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees: approaches
So far we have characterized quality guarantees for region optimal solutions but ...
how agents find such region optimal solutions?
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees: approaches
A generic region optimal algorithm
Initialization Optimization Implementation
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees: approaches
A generic region optimal algorithm
Initialization Optimization Implementation
Agents select an initial action
a1
a0 a2
1/4$
1/2$ 1/2$
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees: approaches
A generic region optimal algorithm
Each group of agents in the region optimizes its decision given other agents decisions.
Initialization Optimization Implementation
a1
a0 a2
1/2$ 1/2$
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees: approaches
A generic region optimal algorithm
Initialization Optimization Implementation
a1
a0 a2
1/2$ 1/2$
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees: approaches
A generic region optimal algorithm
Initialization Optimization Implementation
a1
a0 a2
1/2$ 1/2$
jueves 28 de julio de 2011

Suboptimal coordination with quality guarantees: approaches
A generic region optimal algorithm
Initialization Optimization Implementation
a1
a0 a2
1/2$ 1/2$
The quality of any region optimal in this region in any problem is guaranteed to be at least 50% the value of the
optimal solution
... until stabilitzation
jueves 28 de julio de 2011

Message to take away
• Many real-world problems can be modeled as a network of agents that need to coordinate their actions to optimize system performance
• Optimality is not affordable in many of these emerging large-scale domains
• An open line of research is how to design suboptimal algorithms that provide quality guarantees over the agent’s actions
jueves 28 de julio de 2011

Gracias por vuestra atención!!!
jueves 28 de julio de 2011

![Formación Arquitectos Restauradores. Modelo Pedagógico]PROYECTO DE TESIS LA FORMACIÓN DE LOS ARQUITECTOS RESTAURADORES. BÚSQUEDA DE UN MODELO PEDAGÓGICO. Mariona Genís Vinyals](https://img.pdfslide.net/doc/110x75/5e6e6922c453d6350a1401a2/formacin-arquitectos-restauradores-modelo-pedaggico-proyecto-de-tesis-la-formacin.jpg)












![Bird Species Categorization Using Pose Normalized Deep ...vision.cse.psu.edu/people/chrisF/deep-learning/... · arXiv:1406.2952v1 [cs.CV] 11 Jun 2014 {Donahue, Jia, Vinyals, Hoffman,](https://img.pdfslide.net/doc/110x75/5fd1e166ac10dd3037108c6f/bird-species-categorization-using-pose-normalized-deep-arxiv14062952v1-cscv.jpg)
![Abstract arXiv:2007.03629v2 [cs.LG] 8 Jul 2020Strong Generalization and Efficiency in Neural Programs Yujia Li, Felix Gimeno, Pushmeet Kohli, Oriol Vinyals DeepMind {yujiali,fgimeno,pushmeet,vinyals}@google.com](https://img.pdfslide.net/doc/110x75/5fb4e3818ec2426c9f6bf53b/abstract-arxiv200703629v2-cslg-8-jul-2020-strong-generalization-and-eficiency.jpg)


![Meta-transfer Learning for Few-shot Learningyaliu/files/meta... · Datasets miniImageNet - Reorganized from ImageNet - Vinyals et al.[1] first devised the dataset, and it is widely](https://img.pdfslide.net/doc/110x75/5ed637a50c1f140c715b43be/meta-transfer-learning-for-few-shot-learning-yaliufilesmeta-datasets-miniimagenet.jpg)

![Abstract arXiv:1608.05343v1 [cs.LG] 18 Aug 2016 · Decoupled Neural Interfaces using Synthetic Gradients Max Jaderberg Wojciech Marian Czarnecki Simon Osindero Oriol Vinyals Alex](https://img.pdfslide.net/doc/110x75/5f3ccf0376636a4d0b21ad14/abstract-arxiv160805343v1-cslg-18-aug-2016-decoupled-neural-interfaces-using.jpg)





