Embed Size (px)
Citation preview

Copyright
by
Nalini Moti Belaramani
2009

The Dissertation Committee for Nalini Moti Belaramanicertifies that this is the approved version of the following dissertation:
Policy Architecture for Distributed
Storage Systems
Committee:
Mike Dahlin, Supervisor
Lorenzo Alvisi
Mohamed Gouda
Lili Qiu
Petros Maniatis

Policy Architecture for Distributed
Storage Systems
by
Nalini Moti Belaramani, B.Eng.; M.Phil.
DISSERTATION
Presented to the Faculty of the Graduate School of
The University of Texas at Austin
in Partial Fulfillment
of the Requirements
for the Degree of
DOCTOR OF PHILOSOPHY
THE UNIVERSITY OF TEXAS AT AUSTIN
August 2009

To Mom, Dad, and Kiran.
asato ma satgamaya,
tamaso ma jyotirgamaya,
mrityor ma amritamgamaya.
From untruth to truth,
From darkness to light,
From death to immortality.

Acknowledgments
So many people who have helped make my dream a reality. This dis-
sertation would not have been possible were not for following people.
My adviser, Mike Dahlin. I have the utmost respect and gratitude for
my adviser. Mike is probably the best adviser a Ph.D. student can have. What
I admire most about Mike is his quest for perfection in everything he does—be
it coding, writing, managing time, or managing students. I am grateful for his
gentle prodding that has helped me push my limits and achieve what I have.
Thank you Mike for imparting your knowledge to me.
My graduate committee members,who were great to work with. Their
questions and comments have helped me to understand the value and the
pitfalls of my work better. And of course, Petros Maniatis for the technical
discussions that have helped shape my work and for always encouraging me
to brag about my work.
Jiandan Zheng, Robert Soule, and Robert Grimm with whom collabo-
ration was easy and rewarding.
The LASR lab, which is full of a cool bunch of people who sincerely
want every one to succeed. I thank everyone for sitting through my numerous
practice talks, reading my drafts, and just lending me ears when I wanted
to talk things out. The support staff, which is is phenomenal. If it weren’t
v

for Gloria Ramirez, Sara Strandtman, and Lydia Griffith, I would be lost in
the bureaucratic maze of the UT-system. The technical support staff is also
wonderful to work with. I would have been handicapped without their help in
setting up and managing machines for experiments.
I have been lucky to meet a great set of friends who really care about
me and have, in one way or the other, made sure I do not lock myself in a hole.
They include: Edmund Wong for introducing me to gastronomic delights that
make stress disappear into thin air, for feeding me, for sharing my frustrations,
for answering my questions, and most importantly, for brightening up my day
with his energy. Amol Nayate, Joseph Modayil, Prem Melville, Shilpa Chhada,
and Misha Bilenko for taking me under their wings, for helping me adapt to
the new culture I found myself in, and for being my family away from home.
Richa Gargh and Yannis Korkolis for always being there when I need to fill
my people quota, when I want to celebrate, or when I just want to bum
around. The Brown Trash family for making me feel that I belong, for hosting
awesome pot-lucks, and for being such great dance party crashers! My Hong
Kong friends for being my personal cheerleaders, for not letting distance come
in the way of friendships, and for always believing that I can achieve great
things.
In the final stretch, when all I did was write my dissertation, I thank
the following persons for helping me maintain my sanity: Alexandre Dumas
and Stephenie Meyer, who gave me my daily dose of drama through their
works, the Count of Monte Cristo and the Twilight series. DJ Tiesto, whose
vi

weekly podcast helped me drown out the rest of the world in techno beats and
just focus on writing.
Lastly, I thank the four most important persons in my life:
Jason Brandt, for being there for me, sharing my happiness and frus-
trations, making sure I am well-fed and well-slept, for bearing with my silly
and foul moods with a laugh. Thank you Jason for being in my life and for
being you!
My mom, my dad, and my sister Kiran, for staying by my side through
thick and thin, cheering me on, and for always believing in me. They have a
big part in shaping who I am today and what I have achieved. Despite being
far away, you are close to my heart. I love you.
vii

Policy Architecture for Distributed
Storage Systems
Nalini Moti Belaramani, Ph.D.
The University of Texas at Austin, 2009
Supervisor: Mike Dahlin
Distributed data storage is a building block for many distributed sys-
tems such as mobile file systems, web service replication systems, enterprise file
systems, etc. New distributed data storage systems are frequently built as new
environment, requirements or workloads emerge. The goal of this dissertation
is to develop the science of distributed storage systems by making it easier
to build new systems. In order to achieve this goal, it proposes a new policy
architecture, PADS, that is based on two key ideas: first, by providing a set of
common mechanisms in an underlying layer, new systems can be implemented
by defining policies that orchestrate these mechanisms; second, policy can be
separated into routing and blocking policy, each addresses different parts of the
system design. Routing policy specifies how data flow among nodes in order
to meet performance, availability, and resource usage goals, whereas blocking
policy specifies when it is safe to access data in order to meet consistency and
durability goals.
viii

This dissertation presents a PADS prototype that defines a set of dis-
tributed storage mechanisms that are sufficiently flexible and general to sup-
port a large range of systems, a small policy API that is easy to use and cap-
tures the right abstractions for distributed storage, and a declarative language
for specifying policy that enables quick, concise implementations of complex
systems.
We demonstrate that PADS is able to significantly reduce development
effort by constructing a dozen significant distributed storage systems spanning
a large portion of the design space over the prototype. We find that each
system required only a couple of weeks of implementation effort and required
a few dozen lines of policy code.
ix

Table of Contents
Acknowledgments v
Abstract viii
List of Tables xvi
List of Figures xviii
Chapter 1. Introduction 1
1.0.1 Contributions . . . . . . . . . . . . . . . . . . . . . . . . 7
Chapter 2. Need for a General Framework 9
2.1 Large Design Space . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.1 PRACTI Taxonomy . . . . . . . . . . . . . . . . . . . . 12
2.2 Need for New Storage Systems . . . . . . . . . . . . . . . . . . 16
2.3 Difficulty in Building a New Storage System . . . . . . . . . . 17
2.4 Need for a General Framework . . . . . . . . . . . . . . . . . . 19
Chapter 3. The PADS Approach 20
3.1 Separation of Mechanisms and Policy . . . . . . . . . . . . . . 20
3.2 Separation of Policy into Routing and Blocking . . . . . . . . . 21
3.3 PADS Prototype . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.3.1 Using PADS . . . . . . . . . . . . . . . . . . . . . . . . 24
3.4 Scope and Limitations . . . . . . . . . . . . . . . . . . . . . . 25
3.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
x

Chapter 4. Routing Policy 28
4.1 What is Routing? . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.2 Subscriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.3 Event-driven API . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.3.1 Triggers . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.3.2 Actions . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.3.3 Stored Events . . . . . . . . . . . . . . . . . . . . . . . 36
4.4 R/OverLog . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.4.1 R/OverLog Language Semantics . . . . . . . . . . . . . 40
4.4.1.1 Tuples, Events and Data Types . . . . . . . . . 40
4.4.1.2 Tables and Facts . . . . . . . . . . . . . . . . . 41
4.4.1.3 Timing Events . . . . . . . . . . . . . . . . . . 42
4.4.1.4 Rules . . . . . . . . . . . . . . . . . . . . . . . . 42
4.4.1.5 Aggregates . . . . . . . . . . . . . . . . . . . . 44
4.4.1.6 Functions . . . . . . . . . . . . . . . . . . . . . 45
4.4.1.7 Watch Statements . . . . . . . . . . . . . . . . 45
4.4.2 R/OverLog Policies . . . . . . . . . . . . . . . . . . . . 46
4.4.3 R/OverLog vs. OverLog . . . . . . . . . . . . . . . . . . 47
4.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Chapter 5. Blocking Policy 49
5.1 What is Blocking? . . . . . . . . . . . . . . . . . . . . . . . . . 49
5.2 Blocking Points . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.3 Blocking Conditions . . . . . . . . . . . . . . . . . . . . . . . . 52
5.4 Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5.4.1 Monotonic-read coherence . . . . . . . . . . . . . . . . . 57
5.4.2 Delta Coherence . . . . . . . . . . . . . . . . . . . . . . 57
5.4.3 Causal Consistency . . . . . . . . . . . . . . . . . . . . 58
5.4.4 Sequential Consistency . . . . . . . . . . . . . . . . . . 59
5.4.5 Linearizability . . . . . . . . . . . . . . . . . . . . . . . 60
5.4.6 TACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.4.7 Two-phase Commit . . . . . . . . . . . . . . . . . . . . 64
5.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
xi

Chapter 6. The Mechanisms Layer 68
6.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
6.1.1 Basic Model . . . . . . . . . . . . . . . . . . . . . . . . 70
6.2 Local Storage Module . . . . . . . . . . . . . . . . . . . . . . . 71
6.2.1 Update Log and Object Store . . . . . . . . . . . . . . . 71
6.2.2 Local Access API . . . . . . . . . . . . . . . . . . . . . 72
6.3 Communication Module . . . . . . . . . . . . . . . . . . . . . . 73
6.3.1 Basic Subscriptions . . . . . . . . . . . . . . . . . . . . 75
6.3.2 Separate Invalidation and Body Subscriptions. . . . . . 75
6.3.3 Supporting Flexible Consistency . . . . . . . . . . . . . 76
6.3.4 State-based Synchronization . . . . . . . . . . . . . . . 78
6.3.5 Supporting Efficient Dynamic Subscriptions . . . . . . . 78
6.3.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . 80
6.4 Consistency Bookkeeping Module . . . . . . . . . . . . . . . . 81
6.4.1 Dimensions of Local Consistency State . . . . . . . . . . 81
6.4.2 Local Consistency State . . . . . . . . . . . . . . . . . . 82
6.4.3 Updating the State . . . . . . . . . . . . . . . . . . . . . 85
6.5 Conflict Detection . . . . . . . . . . . . . . . . . . . . . . . . . 88
6.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Chapter 7. Bridging the Gap 92
7.1 Mechanisms API . . . . . . . . . . . . . . . . . . . . . . . . . 92
7.2 Making it Easier to Use . . . . . . . . . . . . . . . . . . . . . . 96
7.2.1 R/M Interface . . . . . . . . . . . . . . . . . . . . . . . 98
7.2.2 R/OverLog Runtime . . . . . . . . . . . . . . . . . . . . 101
7.2.3 BlockingPolicyModule (BPM) . . . . . . . . . . . . . . . 104
7.2.4 BlockingRoutingBridge (BRB) . . . . . . . . . . . . . . 106
7.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Chapter 8. Evaluation Part 1: Microbenchmarks 110
8.1 Fundamental Overheads . . . . . . . . . . . . . . . . . . . . . 111
8.2 Quantifying the Constants . . . . . . . . . . . . . . . . . . . . 116
8.3 Absolute Performance . . . . . . . . . . . . . . . . . . . . . . . 122
8.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
xii

Chapter 9. Evaluation 2: Case-studies 126
9.1 Evaluation Overview . . . . . . . . . . . . . . . . . . . . . . . 127
9.2 Architectural Equivalence . . . . . . . . . . . . . . . . . . . . . 129
9.3 Case-studies . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
9.3.1 Simple Client Server (SCS) . . . . . . . . . . . . . . . . 132
9.3.1.1 System Overview . . . . . . . . . . . . . . . . . 133
9.3.1.2 P-SCS Implementation . . . . . . . . . . . . . . 134
9.3.2 Full Client Server (FCS) . . . . . . . . . . . . . . . . . . 137
9.3.3 Coda . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
9.3.3.1 System Overview . . . . . . . . . . . . . . . . . 139
9.3.3.2 P-Coda Implementation . . . . . . . . . . . . . 139
9.3.4 TRIP . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
9.3.4.1 P-TRIP Implementation . . . . . . . . . . . . . 141
9.3.5 Bayou . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
9.3.5.1 P-Bayou Implementation . . . . . . . . . . . . . 143
9.3.6 Chain Replication . . . . . . . . . . . . . . . . . . . . . 144
9.3.6.1 P-Chain-Replication Implementation . . . . . . 145
9.3.7 TierStore . . . . . . . . . . . . . . . . . . . . . . . . . . 147
9.3.7.1 System Overview . . . . . . . . . . . . . . . . . 148
9.3.7.2 P-TierStore Implementation . . . . . . . . . . . 148
9.3.8 Pangaea . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
9.3.8.1 P-Pangaea Implementation . . . . . . . . . . . 151
9.4 Properties of Constructed Systems . . . . . . . . . . . . . . . . 153
9.4.1 Realism . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
9.4.2 Agility . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
9.4.3 Absolute Performance . . . . . . . . . . . . . . . . . . . 160
9.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
Chapter 10. Related Work 163
10.1 Replication Protocols . . . . . . . . . . . . . . . . . . . . . . . 163
10.2 Declarative Domain Specific Languages . . . . . . . . . . . . . 167
10.3 Conflict Detection . . . . . . . . . . . . . . . . . . . . . . . . . 169
xiii

Chapter 11. Limits and Future Work 172
11.1 Limits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
11.1.1 PADS Model . . . . . . . . . . . . . . . . . . . . . . . . 173
11.1.2 Extensibility . . . . . . . . . . . . . . . . . . . . . . . . 176
11.1.3 Current Implementation Limits . . . . . . . . . . . . . . 178
11.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
11.2.1 Streamlined Implementation . . . . . . . . . . . . . . . 181
11.2.2 Formal Model and Verification . . . . . . . . . . . . . . 183
11.2.3 Self-tuning File System . . . . . . . . . . . . . . . . . . 185
11.2.4 New Applications . . . . . . . . . . . . . . . . . . . . . 186
Chapter 12. Conclusion 188
12.1 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
12.2 Research Experience . . . . . . . . . . . . . . . . . . . . . . . 190
Appendices 192
Appendix A. Code Listings 193
A.1 Simple Client Server (P-SCS) . . . . . . . . . . . . . . . . . . 193
A.1.1 Routing Policy . . . . . . . . . . . . . . . . . . . . . . . 193
A.1.2 Blocking Policy . . . . . . . . . . . . . . . . . . . . . . . 195
A.2 Full Client Server (P-FCS) . . . . . . . . . . . . . . . . . . . . 196
A.2.1 Routing Policy . . . . . . . . . . . . . . . . . . . . . . . 196
A.2.2 Blocking Policy . . . . . . . . . . . . . . . . . . . . . . . 200
A.3 P-Coda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
A.3.1 Routing Policy . . . . . . . . . . . . . . . . . . . . . . . 200
A.3.2 Blocking Policy . . . . . . . . . . . . . . . . . . . . . . . 203
A.3.3 Co-operative Caching . . . . . . . . . . . . . . . . . . . 203
A.4 P-TRIP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204
A.4.1 Routing Policy . . . . . . . . . . . . . . . . . . . . . . . 204
A.4.2 Blocking Policy . . . . . . . . . . . . . . . . . . . . . . . 205
A.4.3 Hierachical topology . . . . . . . . . . . . . . . . . . . . 205
A.5 P-Bayou . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
xiv

A.5.1 Routing Policy . . . . . . . . . . . . . . . . . . . . . . . 206
A.5.2 Blocking Policy . . . . . . . . . . . . . . . . . . . . . . . 206
A.6 P-ChainReplication . . . . . . . . . . . . . . . . . . . . . . . . 207
A.6.1 Routing Policy . . . . . . . . . . . . . . . . . . . . . . . 207
A.6.2 Blocking Policy . . . . . . . . . . . . . . . . . . . . . . . 211
A.7 P-TierStore . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211
A.7.1 Routing Policy . . . . . . . . . . . . . . . . . . . . . . . 211
A.7.2 Blocking Policy . . . . . . . . . . . . . . . . . . . . . . . 212
A.8 P-Pangaea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
A.8.1 Routing Policy . . . . . . . . . . . . . . . . . . . . . . . 213
A.8.2 Blocking Policy . . . . . . . . . . . . . . . . . . . . . . . 217
Bibliography 218
Vita 233
xv

List of Tables
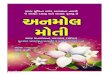
1.1 Features covered by case-study systems. . . . . . . . . . . . . 5
2.1 Partial list of distributed storage systems published in the past25 years. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Storage systems design space and examples . . . . . . . . . . . 11
2.3 Approximate lines of code of several existing distributed datastorage systems. . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.1 Routing triggers provided by PADS. . . . . . . . . . . . . . . . 33
4.2 Routing actions provided by PADS. . . . . . . . . . . . . . . . 34
4.3 PADS’s stored events interface. . . . . . . . . . . . . . . . . . 36
5.1 Conditions available for defining blocking predicates. . . . . . 53
6.1 Components of invalidations and bodies . . . . . . . . . . . . 72
6.2 Mapping between blocking conditions and local consistency statemaintained. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
7.1 Actions available to policy . . . . . . . . . . . . . . . . . . . . 93
7.2 Triggers sent from the underlying layer to the controller. . . . 94
7.3 Flags available for specifying consistency . . . . . . . . . . . . 95
7.4 Flags provided by the BlockingPolicyModule. . . . . . . . . . 105
8.1 Network overheads associated with subscription primitives. . . 111
8.2 Storage and network overheads under network disruptions. . . 115
8.3 Messages per interested update sent by a coherence-only systemand PADS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
8.4 Read/write performance for 1KB objects/files in milliseconds. 122
8.5 Read/write performance for 100KB objects/files in milliseconds. 122
8.6 Performance numbers for processing NULL trigger to produceNULL event. . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
xvi

9.1 Read and write latencies in milliseconds for Coda and P-Coda. 160
xvii

List of Figures
2.1 PR-AC-TI taxonomy for classifying families of storage systems. 13
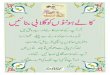
3.1 PADS approach to system development. . . . . . . . . . . . . 24
6.1 Internal structures of the mechanisms layer. . . . . . . . . . . 69
6.2 Diagram comparing the messages sent on invalidation streamswithout and with multiplexing. . . . . . . . . . . . . . . . . . 79
6.3 Pseudocode for processing received invalidations. . . . . . . . . 86
6.4 Pseudocode for processing other received messages on invalida-tion streams. . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
7.1 Bridging the mechanisms and policy layers. . . . . . . . . . . . 97
7.2 Internal queues in the R/M Interface . . . . . . . . . . . . . . 98
7.3 Major components of the R/OverLog Runtime. . . . . . . . . 101
7.4 Blocking Policy Module intercepting operations. . . . . . . . . 104
7.5 Blocking policy implementation for causal consistency. . . . . 105
7.6 Blocking policy implementation for the simple client-server sys-tem (refer to Section 9.3.1) . . . . . . . . . . . . . . . . . . . . 107
8.1 Network bandwidth cost to synchronize 1000 10KB files, 100 ofwhich are modified. . . . . . . . . . . . . . . . . . . . . . . . . 116
8.2 Bandwidth to synchronize 500 objects of size 3KB . . . . . . . 118
8.3 Bandwidth to subscribe to varying number of single-object in-terest sets with and without subscription multiplexing. . . . . 120
8.4 Bandwidth to subscribe to varying number of updates to 500objects sets for checkpoint and log synchronization. . . . . . . 121
9.1 Demonstration of full client-server system, P-FCS, under failures.157
9.2 Demonstration of TierStore under a workload similar to that inFigure 9.1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
9.3 Average read latency of P-Coda and P-Coda with cooperativecaching. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
xviii

Chapter 1
Introduction
Distributed data storage is a building block for many distributed sys-
tems such as mobile file systems, web service replication systems, enterprise
file systems, etc. Often, these systems take advantage of data replication (i.e.
storing copies of data on multiple nodes) to provide availability, durability,
and performance guarantees.
However, there are tradeoffs inherent in any replication-based system
design. For example, the CAP dilemma [30] states that replication systems
cannot provide strong Consistency and high Availability in a network prone
to Partitions. Also, there is a fundamental tradeoff between Performance and
Consistency (known as the PC dilemma [55]). Because of these tradeoffs, it
is difficult to design a single replication system that satisfies the needs of all
environments and workloads. Every replication system needs to make tradeoffs
between availability, consistency, and performance to suit the environment it
is targeting. As new workloads, environments, and technologies emerge, new
tradeoffs need to be made and new systems need to be developed.
For example, consider the current technology trends: increasing popu-
larity of devices such as smartphones, set-top boxes and cameras, with ade-
1

quate storage and networking capabilities, and the availablity of cheap always-
available cloud storage. Users would want a distributed storage system that
allows them to share data (such as photos, music, and files) among their per-
sonal devices and cloud, so that they can access the latest version of their data
from any device. Due to the mobility and the resource limitations of the de-
vices, the system needs to support arbitrary synchronization topologies, allow
different devices to store different subsets of data, and take advantage of the
various networking technologies for greater energy-efficiency.
Unfortunately, building a new storage system is a huge task. It can take
months or even years to build such a system from scratch. Modifying existing
systems to accommodate new requirements may still require a lot of effort.
On the other hand, using current state-of-the-art replication frameworks may
not be a viable option because they are limited in the range of systems they
support (refer to Chapter 2).
The goal of this thesis is to make it easier to design and build dis-
tributed storage systems so that new systems can be quickly developed to
address the needs of new environments. In order to achieve this goal, this the-
sis proposes a new policy architecture, PADS, with a new set of abstractions
for building distributed storage systems. This work provides both practical
and scientific benefits. Its practical benefits include significant reduction in
effort required to build new distributed storage systems and increased flexibil-
ity allowing constructed systems to quickly adapt to new workloads. As for
scientific benefits, this work enhances the understanding of distributed storage
2

systems by identifying the right set of building blocks.
PADS is based on two key ideas: first, the separation of mechanisms and
policy, and second, the separation of policy into routing and blocking concerns.
The first idea is based on the observation that there is large overlap in
the low-level details of various replication systems. Every system stores data,
transfers updates, and maintains bookkeeping information. The differences
between the systems are the choices they make to accommodate their design
tradeoffs, i.e. where data items are stored, how and when information is
propagated, and what consistency and durability semantics to guarantee. If
all the necessary primitives were provided by a common mechanisms layer, a
system can be built by specifying policies that orchestrate these primitives.
The second idea separates the design of a system into routing policy
and blocking policy.
• Routing policy: Many of the design choices of distributed storage systems
are simply routing decisions about data flows between nodes. These
decisions provide answers to questions such as: “When and where to
send updates?” or “Which node to contact on a read miss?”. They
largely determine how a system meets its performance, availability, and
resource consumption goals.
• Blocking policy: Blocking policy specifies predicates for when nodes must
block incoming updates or local read/write requests to maintain system
invariants. Blocking is important for meeting consistency and durability
3

goals. For example, a policy might block the completion of a write until
the update reaches at least 3 other nodes.
Using the PADS approach has its advantages: First, designers focus
on high-level design rather than on low-level implementation. As a result,
development time is greatly reduced. Designers can quickly build systems
with new innovative techniques for new environments as they emerge. Second,
because the underlying framework provides mechanims to take care of diffi-
cult details such as failure recovery and consistency enforcement, designers
can handle corner-cases easily. Third, because the underlying framework is
general, it allows developers to quickly adapt existing systems if requirements
change. Fourth, since it is easier to informally review and formally verify
higher-level specification, this approach facilitates the development of correct
and deadlock-free systems.
However, the main challenge in designing PADS is to ensure that (1) it
is sufficiently general to support a wide range of systems including client-server
systems, object-replication systems and server-replication systems, (2) it has
an API that is easy to learn and allows easy specification of common replication
techniques such as demand caching, leases, and callbacks, (3) it makes it easy
to reason about corner-cases such as failure detection and recovery, and (4) it
is sufficiently efficient so that systems do not have pay a high cost for PADS’s
generality.
4

Sim
ple
Client
Server
Full
Client
Server
Coda
[49]
Coda
+C
oop
Cache
TR
IP[6
4]
TR
IP+
Hie
r
Tie
rSto
re
[26]
Tie
rSto
re
+C
C
Chain
Repl
[88]
Bayou
[69]
Bayou
+Sm
all
Dev
Pang-
aea
[77]
Routing
Rule
s24
43
37
45
66
14
22
45
10
10
59
Blo
ckin
g5
67
74
41
14
32
1C
ondit
ions
Topolo
gy
Clien
t/C
lien
t/C
lien
t/C
lien
t/C
lien
t/Tre
eTre
eTre
eC
hain
sA
d-
Ad-
Ad-
Ser
ver
Ser
ver
Ser
ver
Ser
ver
Ser
ver
Hoc
Hoc
Hoc
Rep
lica
tion
Part
ial
Part
ial
Part
ial
Part
ial
Full
Full
Part
ial
Part
ial
Full
Full
Part
ial
Part
ial
Dem
and
√√
√√
√√
√
cach
ing
Pre
fetc
hin
g√
√√
√√
√√
√√
√
Cooper
ative
√√
√√
√
cach
ing
Consi
sten
cySeq
uen
-Seq
uen
-O
pen
/O
pen
/Seq
uen
-Seq
uen
-M
ono.
Mono.
Lin
ear-
Causa
lM
ono.
Mono.
tial
tial
Clo
seC
lose
tial
tial
Rea
ds
Rea
ds
izablity
Rea
ds
Rea
ds
Callback
s√
√√
√
Lea
ses
√√
√
Invalvs.
Invali-
Invali-
Invali-
Invali-
Invali-
Invali-
Update
Update
Update
Update
Update
Update
whole
update
dation
dation
dation
dation
dation
dation
pro
pagation
Dis
connec
ted
√√
√√
√√
√√
√
oper
ation
Cra
sh√
√√
√√
√√
√√
√√
√
reco
ver
y
Obje
ctst
ore
√√
√√
√√
√√
√√
√√
inte
rface
*File
syst
em√
√√
√√
√√
√√
√√
inte
rface
*
Tab
le1.
1:Fe
atur
esco
vere
dby
case
-stu
dysy
stem
s.E
ach
colu
mn
corr
espo
nds
toa
syst
emim
plem
ente
don
PAD
S,an
dth
ero
ws
list
the
set
offe
atur
esco
vere
dby
the
impl
emen
tati
on.
∗ Not
eth
atth
eor
igin
alim
plem
enta
tion
sof
som
esy
stem
spr
ovid
ein
terf
aces
that
diffe
rfr
omth
eob
ject
stor
eor
file
syst
emin
terf
aces
we
prov
ide
inou
rpr
otot
ypes
.
5

To test the usefulness of PADS, we built a PADS prototype as an
instantiation of the architecture. The prototype consists of three parts: First,
it defines a common set of mechanisms that are general enough to build a
wide range of systems. Second, it separates system policy into two parts:
routing policy that defines how data flows between nodes and blocking policy
that defines when access to data should block. This dichotomy provides a
separation of concerns for designers allowing them to deal with one part of the
design at a time. Third, it distills the main abstractions of distributed storage
systems into a small API and supports declarative policy specification making
it easy for designers to write complex policy concisely.
Ultimately, the evidence of PADS’s benefits is simple: we were able
to build 12 diverse systems (summarized in Table 1.1) in 4 months. These
systems cover a large part of the design space suggesting that PADS is suf-
ficiently general to support new systems. In addition, PADS’s ease of use is
demonstrated by the fact that each system was constructed in less than a hun-
dred lines of policy code. Despite the conciseness, every constructed system is
concrete and deployable—the implementations handle challenging real-world
issues such as configuration and crash recovery. In addition, we find it easy
to add new features to PADS-constructed systems. For example, we add co-
operative caching to P-Coda, our implementation of Coda [49], in only one
week.
Our experience provides evidence of PADS’s generality, ease of use,
concreteness, and ease of adaptability. This flexibility comes only at a modest
6

cost to absolute performance. Microbenchmark performance of an implemen-
tation of one system (P-Coda) built on our user-level Java PADS prototype is
within ten to fifty percent of the original system (Coda [49]) in the majority
of cases and 3.3 times worse in the worst case we measure.
1.0.1 Contributions
By defining a new policy architecture, this dissertation makes the fol-
lowing contributions:
• It provides a new way to build distributed storage systems that signifi-
cantly reduces development effort.
• It defines the set of mechanisms required for a common underlying layer
over which a wide range of systems can be constructed.
• It proposes an intuitive and structured dichotomy for policy specification.
• It defines a policy API that is small yet sufficient for easy specification
of complex systems.
• It provides a prototype with which designers can build new storage sys-
tems quickly with modest performance overheads.
• It provides ready-to-use prototypes of 12 diverse systems that cover a
large part of the design space.
This dissertation is organized as follows: Chapter 2 makes a case for
why a new framework is needed for building storage systems. It looks at the
7

design space covered by distributed storage systems, current approaches for
building a system and where they fall short, and defines the requirements for
a new framework. Chapter 3 provides a high-level discussion of the PADS
approach and the prototype. Chapters 4 and 5 discuss the routing policy and
blocking policy respectively including their requirements, specification and im-
plementation. Chapter 6 details the implementation of the mechanisms layer
and how it meets the requirements of the policy layer. Chapter 7 details the
interface glue between the mechanisms and the policy layers. Chapters 8 and
9 evaluate the benefits of PADS for system development. Chapter 8 evaluates
the performance of PADS with various microbenchmarks and chapter 9 eval-
uates the benefits of PADS as a development platform by describing systems
constructed with PADS. Chapter 10 presents some related work. Chapter 11
discusses the limitiations of the architecture and lays out directions for future
work. We summarize the main contributions and the lessons learned from this
dissertation in Chapter 12.
8

Chapter 2
Need for a General Framework
This section establishes the need for a general framework to build dis-
tributed storage systems. First, it explores the design range which replication-
based storage systems cover and introduces a taxonomy to classify them. Next,
it provides reasons for why new distributed storage systems will continue to
be needed. Then, it describes the tremendous amount of effort required to
build a new storage system and how current frameworks fall short in terms of
generality. Finally, it defines the requirements for an ideal framework.
2.1 Large Design Space
Time Frame SystemsPre-1985 NFS [68], Replicated Dictionary [90]1985-1994 AFS [42], Coda [49], Deceit [80], Ficus [36],
Sprite [65] XFS [89], Zebra [38]1995-2004 Bayou [86], BlueFS [66], Chain Replication [88],
CFS [21], Farsite [12], Google File System [29],Ivy [63], OceanStore [50], Pangaea [77], PAST [76],Segank [82], TACT [43]
2005-present Cimbiosys [70], Dynamo [25], Omnistore [46],Tier-Store [26], WinFS [59], WheelFS [84]
Table 2.1: Partial list of distributed storage systems published in the past 25 years.
Data storage the basic building block for many distributed systems
9

such as mobile file systems, web service replication systems, enterprise file
systems, and grid replication systems. Distributed storage systems often use
data replication in order to provide durability, availability, and performance
guarantees. In fact, over the years, a significant number of replication-based
distributed storage systems have been built. Figure 2.1 depicts a subset of
systems that have been been published in a few major conferences over the
last 25 years.
Because distributed storage systems need to deal with a wide range of
heterogeneity in terms of devices with diverse capabilities (e.g., phones, set-
top-boxes, laptops, servers), workloads (e.g., streaming media, interactive web
services, private storage, widespread sharing, demand caching, preloading),
connectivity (e.g., wired, wireless, disruption tolerant), and environments (e.g.,
mobile networks, wide area networks, developing regions), they cover a wide
design space—systems employ different techniques in order to accommodate
the requirements, workloads, or environment they target. For example, some
systems may replicate all data on every node whereas others may replicate
specific subsets on each node. Also, systems propagate updates via different
paths (i.e. update propagation topology) and implement different propaga-
tion techniques such demand caching, prefetching, co-operative caching. In
addition, different systems may guarantee different levels of availability and
consistency that are enforced by different means. For example, one system
may guarantee data availability at all times at the expense of consistency
whereas another may use callbacks and leases to implement stronger consis-
10

Design Choices Options Example Systems
Replication Full Replication Bayou [69], Chain Replica-tion [88], TRIP [64], WinFS [67]
Partial Replication BlueFS [66], Coda [49],Sprite [65], Pangaea [77],TierStore [26]
Update TopologyClient-Server BlueFS [66], Coda [49], TRIP [64]Structured Chain Replication [88],
Sprite [65], TierStore [26],WheelFS [84]
Ad-hoc Bayou [69], IceCube [47], Pan-gaea [77]
Propagation Type Operation Bayou [69], IceCube [47]State (Update only) Ficus [36], TACT [43], Tier-
Store [26], WheelFS [84]State (Update BlueFS [66], Coda [49]and Invalidation) Fluid Replication [20]
ConsistencyGuarantees
Strong Chain Replication [88], TRIP [64]Causal Bayou [69], TACT [43]Eventual Ficus [36], Pangaea [77],
WinFS [67]
Commit Policy Implicit Pangaea [77], TierStore [26]Primary-commit Bayou [69], Coda [49]
Availability Always Available Bayou [69], TierStore [26], Pan-gaea [77]
Only When Connected AFS [42], Coda [49], Chain Repli-cation [88]
Durability Local Sufficient Bayou [69], TierStore [26], Pan-gaea [77]
Multi-node Coda [49], Chain Replication [88],WheelFS [84]
Table 2.2: Storage systems design space and examples
11

tency semantics and be unavailable in cases of network partitions. Another
design difference between systems is when a system considers an update to be
durable. For some systems, an update is sufficiently durable if it is persistent
to local disk, whereas other systems may require an update to be persistent
on multiple nodes to be considered durable. Table 2.2 provides a partial list
of the design space covered by distributed storage systems.
2.1.1 PRACTI Taxonomy
In order to aid the understanding of the design space covered by replication-
based systems, we define the PRACTI taxonomy. The taxonomy is based on
three properties:
• Partial Replication (PR): a system can place any subset of data and
metadata on any node. In contrast, some systems require a node to
maintain copies of all data in the system [69, 90, 94].
• Arbitrary Consistency (AC): a system can provide both strong and weak
consistency guarantees and only applications that require strong guaran-
tees pay for them. In contrast, some systems can only enforce relatively
weak coherence guarantees but make no guarantees about stronger con-
sistency properties [36, 77].
• Topology Independence (TI): any node can exchange updates with any
other node. In contrast, many systems restrict communication to client-
server [42, 49, 65] or hierarchical [17, 92] patterns.
12

Partial Replication
(PR)
Topology
Independence
(TI)
Any
Consistency
(AC)
Client-
Server
Hierarchical
DHT
Object
Replication
Server
Replication
PR
AC
TI
Figure 2.1: PR-AC-TI taxonomy for classifying families of storage systems.
Every distributed storage system can be categorized according to which
of the PR-AC-TI properties it provides, as illustrated in Figure 2.1. As the
figure indicates, many existing storage systems can be viewed as belonging to
one of four protocol families, each providing at most two of the PR-AC-TI
properties.
Server replication systems like Replicated Dictionary [90] and Bayou [69]
provide log-based peer-to-peer update exchange that allows any node to send
updates to any other node (TI) and that consistently orders writes across all
objects. Lazy Replication [51] and TACT [94] use this approach to provide
a wide range of tunable consistency guarantees (AC). Some server replication
systems like Chain Replication [88] do not assume topology independence and
allow updates to propagate via fixed paths. Unfortunately, sever replication
13

protocols fundamentally assume full replication: all nodes store all data from
any volume they export and all nodes receive all updates. As a result, these
systems are unable to exploit workload locality to efficiently use networks and
storage, and they may be unsuitable for devices with limited resources.
Client-server systems like Sprite [65] and Coda [49] and hierarchical
caching systems like hierarchical AFS [62] permit nodes to cache arbitrary sub-
sets of data (PR). Although specific systems generally enforce a set consistency
policy, a broad range of consistency guarantees are provided by variations of
the basic architecture (AC). However, these protocols fundamentally require
communication to flow between a child and its parent. Even when systems
permit limited client-client communication for cooperative caching [14, 23, 28],
they must still serialize control messages at a central server for consistency [18].
These restricted communication patterns (1) hurt performance when network
topologies do not match the fixed communication topology or when network
costs change over time (e.g., in environments with mobile nodes), (2) hurt
availability when a network path or node failure disrupts a fixed communi-
cation topology, and (3) limit sharing during disconnected operation when a
set of nodes can communicate with one another but not with the rest of the
system.
DHT-based storage systems such as BH [87], PAST [76], and CFS [21]
implement a specific—if sophisticated—topology and replication policy: they
can be viewed as generalizations of client-server systems where the server is
split across a large number of nodes on a per-object or per-block basis for scal-
14

ability and replicated to multiple nodes for availability and reliability. This
division and replication, however, introduce new challenges for providing con-
sistency. For example, the Pond OceanStore prototype assigns each object
to a set of primary replicas that receive all updates for the object, uses an
agreement protocol to coordinate these servers for per-object coherence, and
does not attempt to provide cross-object consistency guarantees [73].
Object replication systems such as Ficus [36], Pangaea [77], and WinFS [59]
allow nodes to choose arbitrary subsets of data to store (PR) and arbitrary
peers with whom to communicate (TI). But, these protocols enforce no or-
dering constraints on updates across multiple objects, so they can provide
coherence but not consistency guarantees. Unfortunately, reasoning about
the corner cases of consistency protocols is complex, so systems that provide
only weak consistency or coherence guarantees can complicate constructing,
debugging, and using the applications built over them. Furthermore, support
for only weak consistency may prevent deployment of applications with more
stringent requirements.
Our analysis indicate that there is a fundamental challenge to provide
all three PR-AC-TI properties: supporting flexible consistency (AC) requires
careful ordering of how updates propagate through the system, but consistent
ordering becomes more difficult if nodes communicate in ad-hoc patterns (TI)
or if some nodes know about updates to some objects but not other objects
(PR). Existing systems resolve this dilemma in one of three ways. The full
replication of AC-TI replicated server systems ensures that all nodes have
15

enough information to order all updates. Restricted communication in PR-AC
client-server and hierarchical systems ensures that the root server of a subtree
can track what information is cached by descendants; the server can then
determine which invalidations it needs to propagate down and which it can
safely omit. Finally, PR-TI object replication systems simply give up ability to
consistently order writes to different objects and instead allow inconsistencies.
2.2 Need for New Storage Systems
Despite the plethora of existing systems, new systems are constantly
developed to meet the needs of new environments and workloads. The main
reason is that there are fundamental tradeoffs inherent in every storage system
design. For example, the CAP dilemma [30] states that replication systems
cannot provide strong Consistency and high Availability in a network prone to
Partitions. Also, designs often need to make tradeoffs between Performance
and Consistency (PC dilemma [55]). Because of these tradeoffs, every system
makes design choices that balance performance, resource usage, consistency
and availability to best meet the needs of the workload or environment it is
targeting. As new environments and new workloads emerge, they often require
different tradeoffs that existing systems cannot accommodate creating a need
for new systems.
16

System Lines of CodeCoda [49] 167,564TierStore [26] 22,566Pangaea [77] 30,000Bayou [69] 20,425TRIP [64] 16,909
Table 2.3: Approximate lines of code of several existing distributed data storage systems.
2.3 Difficulty in Building a New Storage System
Unfortunately, building a new storage system is not easy. A common
approach to build a storage system is to implement it from scratch. The
advantage of this approach is that it allows designers to hand-craft optimal
tradeoffs for the target workload or environment. Unfortunately, this approach
can take months or years of development effort: designers need to implement all
the low-level details, often re-implementing common techniques. Also, getting
the consistency guarantees right can be tricky. Table 2.3 provides an indication
of the amount of effort required to implement several systems by listing their
lines of code.
Another approach involves modifying existing systems to accommodate
new tradeoffs. Although this approach would enable a lot of code-reuse, it is
not straight-forward. For many systems, their design tradeoffs are embedded
in their low-level implementation and there is a limit to how much they can
be modified.
The third approach involves using an existing distributed storage frame-
work. Unfortunately, current frameworks fall short in terms of generality: they
17

support only full replication or make assumptions regarding update propaga-
tion topology. Systems built with these frameworks can only target specific
environments and may have limited capabilities to adapt to new requirements.
For example, the TACT toolkit [43] allows designers to specify their
consistency requirements in terms of order error, staleness, and numerical or-
der. The toolkit automatically sets up synchronization streams to meet these
requirements. Unfortunately, it assumes full replication of data among nodes.
Swarm [85] is another wide-area peer-replication middleware that allows de-
signers to pick consistency-related options for replica synchronization, failures,
and concurrency. Again, it only supports full replication and carries out up-
date propagation only in a hierarchical fashion.
WheelFS [84], a wide-area distributed file system, supports partial repli-
cation and allows applications to provide semantic cues to specify consistency,
replication level, and placement. However, WheelFS only supports two levels
of consistency on a per-object basis: open-to-close consistency or eventual.
Also, it assumes a single-primary-multiple-backup scheme for update propa-
gation. Deceit [80], a flexible distributed file system that also supports partial
replication and allows users to set parameters for a file to achieve different
levels of availability, performance, and consistency. Unfortunately, it is only
applicable to specific environments: replication among well-connected servers
and client-side caching. Fluid replication [20] also provides a menu of options
for consistency and automatically creates replicas to meet those requirements.
Unfortunately, it is restricted to hierarchical caching.
18

Stackable layers [39], allows designers to create flexible storage systems
with layers that provide different services. Unfortunately, it supports only
local storage not distributed storage.
2.4 Need for a General Framework
Because current approaches for building new distributed storage sys-
tems require substantial effort or are suited for very specific environments,
there is a need for a general framework that can make it easier and faster to
develop a wide range of new distributed storage systems. An ideal framework
must support all PR-AC-TI properties. In particular, it must
• allow any node to store any subset of data,
• not restrict update propagation to a specific topology,
• allow designers to specify a wide range of consistency semantics, and
• facilitate development and evolution of systems to accommodate new
requirements.
This dissertation addresses this need by introducing the PADS archi-
tecture for constructing distributed storage systems. Later chapters provide
details of PADS, how it provides three PR-AC-TI properties, and how it sim-
plifies system development.
19

Chapter 3
The PADS Approach
The previous chapter argues that a new general framework would make
it easier to build distributed storage systems. In order to meet that need, this
thesis proposes the PADS approach to simplify the design and implementation
of storage systems. The PADS approach is based on two key ideas: First, by
separating policy from mechanisms, system developers can focus their energies
on high-level design rather than implementing low-level details. Second, by
separating policy into routing and blocking concerns, the task of building a
system is divided into two smaller sub-problems. This chapter discusses the
intuition behind these approaches and briefly describes how these ideas are
realized in the PADS prototype.
3.1 Separation of Mechanisms and Policy
During the development of a distributed replication system, a lot of
effort is spent on the implementation and the debugging of low-level details,
such as data storage, transmission of data, bookkeeping, conflict detection, etc.
Also, there is a considerable overlap in the low-level techniques that different
systems require, leading to wasted re-engineering effort.
20

PADS argues that by constructing a flexible mechanisms layer that
provides low-level primitives, system development is reduced to writing policies
that orchestrate these primitives, thereby reducing the implementation effort
required.
PADS casts the mechanisms as part of a data plane and policies as part
of a control plane. The data plane encapsulates a set of common mechanisms
that handle details of storing and transmitting data and maintaining consis-
tency information. System designers then build storage systems by specifying
a control plane policy that call upon these mechanisms to implement system
design.
The separation of policy from mechanisms significantly reduces devel-
opment effort for several reasons: First, since the mechanisms layer takes care
of the grunt work, system designers can focus their energies on high-level de-
sign issues. Second, debugging effort is reduced because developers only need
to focus on policy debugging rather than debugging the underlying mecha-
nisms layer. The effort spent on debugging the mechanisms layer is amortized
over all the systems built over it. Third, if system requirements change, only
policy needs to be updated rather than the low-level primitives.
3.2 Separation of Policy into Routing and Blocking
Since distributed storage systems span a wide design space, the next
question is how should policies be specified so that the designs of different
systems can be easily constructed over the mechanisms layer.
21

Our observation is that a lot of the design choices that distributed
systems make can be seen as how data is routed among nodes and when it is
“safe” to access data. PADS is built around this intuition and separates policy
specification along this dichotomy: routing policy and blocking policy.
Routing policy sets up data flows between nodes. It provides answers
to questions such as: “When and where to send updates?” or “Which node
to contact on a read miss?”, and largely determines how a system meets its
performance, availability, and resource consumption goals. For example, in
Bayou [69], a server replication system, a node periodically sets up an update
flow to a random peer to exchange updates. In chain replication [88], another
server replication protocol, updates occur at the head of each chain and flow
down to the tail. In Coda [49], a client-server protocol, a client will fetch data
from the server on a miss and send updates to the server when a file is closed
or when an unreachable server becomes reachable.
Blocking policy can be seen as specifying the system invariants that
must hold before or after an operation can continue. If the system invariants
do not hold, then the operation is blocked. For example, for durability require-
ments, the completion of a write might block until the update reaches three
other nodes. For consistency requirements, the read of a local data object
might block until the local version matches the latest version in the system.
The advantage of this separation is that development is split into two
smaller sub-problems presenting a division of concerns to the designer. Also,
because routing and blocking concerns are very different, their separation en-
22

ables PADS to provide specialized policy API designed to make the specifica-
tion of each concern simpler. On another level, blocking policy and routing
policy can be seen as working together to enforce the safety constraints and
the liveness goals of a system. Blocking policy enforces safety conditions by
ensuring that an operation blocks until system invariants are met, whereas
routing policy guarantees liveness by ensuring that an operation will eventu-
ally unblock—by setting up data flows to ensure the conditions are eventually
satisfied.
3.3 PADS Prototype
To test effectiveness of PADS, we built a Java-based prototype and
constructed a dozen systems with it. The prototype consist of 3 parts: a
flexible and efficient mechanisms layer, a routing policy API, and a blocking
policy API. The mechanisms layer implements all the basic primitives for stor-
ing data objects, sending and receiving updates, and maintaining consistency
information in a way that is able to support all PR-AC-TI properties. The
policy API allows designers to invoke the mechanisms but does so in a way
that is general enough to support a wide range of systems.
The key features of the prototype that enable it to simplify development
include
• its concise policy API that is intuitive, easy to learn, and captures the
right abstractions for distributed storage, and
23

!"#$%!#"&!
'()*+,!
"(-./0!
1-(/2.+,!
"(-./0!
"#$%!
3(45.-67!"#$%!
86/9:+.;4;!
<=6/)>:?-6!
'()*+,!
"(-./0!
1-(/2.+,!
3(+@,!!
A.-6!
"(-./0!
%56/.@/:*(+!"(-./0!
3(45.-:*(+!
%0;>64!
$65-(046+>!
B(C6!D!
"#$%!#"&!
Control
Plane !Data
Plane !
B(C6!E! B(C6!F! B(C6!G!
$:>:!
A-(H;!
I(/:-!
'6:CJK7.>6 !
Figure 3.1: PADS approach to system development.
• its support for a declarative policy specification that enables quick and
concise implementation of complex systems. Routing policy is written as
a set of rules in a declarative domain specific language called R/OverLog.
Blocking policy is written as a set of predicates in a configuration file.
The following chapters (chapters 4, 5, 6 and 7), detail each part of the proto-
type. Chapter 9 provides evidence of PADS’s effectiveness by describing the
range of systems built with PADS.
3.3.1 Using PADS
As Figure 3.1 illustrates, in order to build a distributed storage system
on PADS, a system designer writes a routing policy as a set of rules and a
blocking policy as a set of predicates. She uses a PADS compiler to translate
her routing rules to Java byte-code and places the blocking predicates in a
configuration file. Finally, she distributes a Java jar file containing PADS’s
standard data plane mechanisms and her system’s control policy to the sys-
24

tem’s nodes. Once the system is running at each node, users can access locally
stored data, and the system synchronizes data among nodes according to the
policy.
A PADS node can be seen as an instantiation of a routing and a blocking
policy over the mechanisms layer on a single system node.
3.4 Scope and Limitations
A PADS policy is a specific set of directives rather than a statement of a
system’s high-level goals. Distributed storage design is a creative process and
PADS does not attempt to automate it: a designer must still devise a strategy
to resolve trade-offs among factors like performance, availability, resource con-
sumption, consistency, and durability. For example, a policy designer might
decide on a client-server architecture and specify “When an update occurs at
a client, the client should send the update to the server within 30 seconds”
rather than stating “Machine X has highly durable storage” and “Data should
be durable within 30 seconds of its creation” and then relying on the system
to derive a client-server architecture with a 30 second write buffer.
PADS targets distributed storage environments with mobile devices,
nodes connected by WAN networks, or nodes in developing regions with lim-
ited or intermittent connectivity. In these environments, factors like limited
bandwidth, heterogeneous device capabilities, network partitions, or workload
properties force interesting tradeoffs among data placement, update propaga-
tion, and consistency. Conversely, we do not target environments like well-
25

connected clusters.
Within this scope, there are four design issues for which the current
PADS prototype restricts a designer’s choices:
First, the prototype does not support security specification. Ultimately,
our policy architecture should also define flexible security primitives, and pro-
viding such primitives is important future work [57].
Second, the prototype exposes an object-store interface for local reads
and writes. It does not expose a file system or a tuple store interface. We
believe that these interfaces are not difficult to incorporate. Indeed, we have
implemented an NFS [68] interface over our prototype.
Third, the prototype provides a single mechanism for conflict resolution.
Write-write conflicts are detected and logged in a way that is data-preserving
and consistent across nodes to support a broad range of application-level re-
solvers. We implement a simple last-writer-wins resolution scheme and believe
that it is straightforward to extend PADS to support other schemes [26, 47,
49, 79, 86].
Fourth, the prototype only supports state-transfer (i.e. updates and
meta-data about updates) and not operation-transfer [47, 69].
3.5 Summary
In order to simplify the development of distributed storage systems,
the PADS approach incorporates two ideas: First, systems are constructed
26

by specifying high level-policy over a common mechanisms layer. Second,
policy specification is separated into routing policy and blocking policy, each
of which addresses different design concerns. Later chapters provide details
of the policy layer, the mechanisms layer, and the advantages of PADS for
system development.
27

Chapter 4
Routing Policy
In PADS, routing policy specifies how data and meta-data propagate
among nodes. This chapter discusses what exactly constitutes routing policy
and how it can be specified. The challenge is to define an API that is suf-
ficiently expressive to construct a wide range of systems and yet sufficiently
simple for a designer to comprehend. We discuss how PADS meets this chal-
lenge.
4.1 What is Routing?
A large part of a distributed storage system’s design defines how up-
dates and information propagate among nodes to ensure that system meets its
performance and availability goals. The design provides answers to questions
such as: “When and where to send updates?” or “Which node to contact on
a read miss?”. In effect, the design sets up a overlay among the nodes for
information propagation. For example, in a traditional client-server system,
a client fetches data from the server and sends updates to it. Its design can
be seen as setting up a star-shaped overlay among the nodes with the server
in the center and clients at the edge. To implement hierarchical caching, a
28

system defines a tree overlay among nodes so that updates or notifications
propagate in a hierarchical manner.
What is needed from a policy layer are primitives to set up flows among
nodes, ways to retrieve information about important events (e.g. read miss),
and a means to invoke the flow primitives based on the information received.
In order to address these needs, PADS provides the following tools:
• Subscription: a flexible primitive to set up data flow between two nodes.
• Event-driven API: that informs policy about important events and allows
routing policy to set up data flows at appropriate times.
• R/OverLog: a domain specific declarative language for easy policy spec-
ification.
In short, in PADS, routing policy is written as an event-driven program
comprising of a set of declarative rules that set up or remove subscriptions
when particular events occur. We detail them in later sections of this chapter.
Note that we do not claim that these primitives are minimal or that they are
the only way to realize this approach. However, they have worked well for us
in practice.
4.2 Subscriptions
Systems set up data flows differently. In client-server systems, clients
only send updates to the server, whereas in peer-to-peer systems, any node
29

can send updates to any other node. Nodes in a server replication system
often exchange updates to the whole data set, whereas clients in a client-server
system only retrieve updates for the data they cache. Some systems propagate
notifications rather than updates to quickly propagate update information.
In order to support different types data flows, the primitives provided
by PADS must be efficient, support all three PR-AC-TI properties, support
separate data and meta-data propagation, expose options for different perfor-
mance tradeoffs, and allow incremental progress in cases of disruptions.
Instead of having multiple data flow primitives, PADS is able to encap-
sulate sufficient flexibility into a single primitive—a subscription. A subscrip-
tion is an unidirectional stream of updates between a pair of nodes. For each
subscription, the policy writer can choose
• The source and the destination nodes: Updates are sent from the source
node to the destination node. Since subscriptions can be set up between
any nodes, they support topology independence (TI).
• The subset of data that is of interest to the subscription: Only updates
to objects that are in the interest set will be sent on the subscription.
This allows subscriptions to support partial replication (PR).
• What type of information should be sent: There are two choices: invalida-
tions or bodies. An invalidation indicates that an update to a particular
object occurred at a particular instant in time, whereas a body contains
30

the data for a specific update. The advantage of separating invalidation
and body streams is that it enables meta-data and data to propagate
via different paths. A node can quickly and cheaply inform other nodes
about an update, via an invalidation, without having to send the entire
update. Also, nodes can choose to only receive bodies of the updates
they care about, leading to better bandwidth efficiency.
• The logical start time: Only updates that have occurred to the objects of
interest from the start time will be sent on the subscription. Therefore, a
new subscription can continue where the previous one left off supporting
incremental progress.
• The catchup method: If the start time of an invalidation subscription is
earlier than the sender’s current time, then the sender has two options,
each of which has different performance tradeoffs: the sender can trans-
mit either a log of the updates that have occurred since the start time
or a checkpoint of the latest versions of the objects. Body subscription,
however, only send checkpoints and do not support the log option.
Hence, setting up data flows is reduced to setting up subscriptions
among nodes. For example, if a designer wants to implement hierarchical
caching, the routing policy would set up subscriptions among nodes to send
updates up and to fetch data down the hierarchy. If a designer wants nodes
to randomly gossip updates, the routing policy would set up subscriptions
between random nodes. If a designer wants mobile nodes to exchange updates
31

when they are in communication range, the routing policy would probe for
available neighbors and set up subscriptions at opportune times.
The advantage of having a single primitive is that it makes make system
design cleaner—all routing is set up in terms of subscriptions.
4.3 Event-driven API
In order to make it easier to write routing policies, the interface should
allow designers to do four things: to set up subscriptions, to receive information
about events, to store and look up data objects in the underlying layer, and
to communicate with blocking policy . For example, a client’s routing policy
needs to know when a local read miss occurs so that it can establish a sub-
scription to retrieve the required data from the server. In a publish/subscribe
system, a node may store and read from a configuration object the sets of data
it is interested in. For consistency reasons, a blocking policy may block the
completion of a write until the routing policy indicates (by sending an message
to the blocking policy) that the update has propagated to the required nodes.
PADS provides three sets of primitives for specifying routing policies:
(1) a set of 9 triggers that expose events pertaining to the state of the data
plane (2) a set of 7 actions for establishing and removing subscriptions (3) a
set of 5 stored events that allow a policy to persistently store and access data
objects for configuration options and information affecting routing decisions.
Consequently, writing routing policy entails invoking the appropriate actions
or storing events based on the triggers and events received.
32

Local Read/Write TriggersOperation block obj, off, len, blocking point, failed conditionWrite obj, off, len, writerId, timeDelete obj, writerId, time
Message Arrival TriggersInval arrives srcId, obj, off, len, writerId, timeSend body success srcId, obj, off, len, writerId, timeSend body failed srcId, destId, obj, off, len, writerId, time
Connection TriggersSubscription start srcId, destId, objS, inval|bodySubscription caught-up srcId, destId, objS, invalSubscription end srcId, destId, objS, reason, inval|body
Table 4.1: Routing triggers provided by PADS.objId, off, and len indicate the object identifier, offset, and length of the update to be sent.blocking point and failed condition indicate at which point an operation blocked and what
condition failed (refer to Chapter 5). writerId and time indicate the logical time of aparticular update. srcId and destId are the identifiers of the source node and the
destination node respectively. objS indicates the interest set of the subscription. inval |body indicate the type of subscription. reason indicates whether the subscription ended
due to failure or termination.
In fact, because the number of primitives provided by PADS is small,
designers are not overwhelmed by too much choice. Most importantly, since we
were able to express a wide range of systems with these primitives (refer Chap-
ter 9), we believe that these primitives capture the fundamental abstractions
for distributed storage systems.
The following subsections detail these primitives.
4.3.1 Triggers
PADS triggers expose to the routing policy events that occur in the
data plane. As Table 4.3.1 details, these events fall into three categories.
33

Subscription ActionsAdd Inval Sub srcId, destId, objS, [startTime], LOG|CP|CP+BodyAdd Body Sub srcId, destId, objS, [startTime]Send Body srcId, destId, objId, off, len, writerId, timeRemove Inval Sub srcId, destId, objSRemove Body Sub srcId, destId, objS
Consistency-related ActionsAssign Seq objId, off, len, writerId, timeB Action <policy defined>
Table 4.2: Routing actions provided by PADS.objId, off, and len indicate the object identifier, offset, and length of the update to be sent.startTime specifies the logical start time of the subscription. writerId and time indicatethe logical time of a particular update. The fields for the B Action are policy defined.
• Local operation triggers inform the routing policy when an operation
blocks because it needs additional information to complete or when a
local write or delete occurs.
• Message receipt triggers inform the routing policy when an invalidation
arrives or whether a send body succeeds or fails.
• Connection triggers inform the routing policy when a subscription is suc-
cessfully established, when a subscription has caused a receiver’s state to
be caught up with a sender’s state (i.e., the subscription has transmitted
all updates to the subscription set up to the sender’s current time), or
when a subscription is removed or fails.
34

4.3.2 Actions
PADS actions allow the routing policy to set up data flows (i.e. sub-
scriptions) among nodes. As Table 4.3.2 details, these actions fall into two
categories.
• Add subscription actions that establish streams of invalidations or bodies
for specific subsets of objects between two nodes. The send body action
is a special case of a subscription in which only the body of a single
object is transferred.
• Remove subscription actions that terminate invalidation or body streams
between two nodes.
PADS also defines a third type of actions that aid the enforcement
of consistency: the Assign Seq action and the B Action. Assign Seq action
marks a previous update with a commit sequence number allowing policies
to implement various consistency and commit protocols. For example, in a
client-server system, in order to enforce serializability, when a server receives
an update to an object, it uses the Assign Seq action to commit the update once
it is sure that all other versions of the object (located on other clients) have
been invalidated. Serializability can be guaranteed at clients by reading only
valid committed versions (refer to Chapter 9). B Action allows routing policy
to send messages to blocking policy. Blocking policy may define conditions
based on information available to routing policy. For example, whether the
35

Stored EventsWrite event objId, eventName, field1, ..., fieldNRead event objIdRead and watch event objIdStop watch objIdDelete events objId
Table 4.3: PADS’s stored events interface.objId specifies the object in which the events should be stored or read from. eventName
defines the name of the event to be written and field* specify the values of fields associatedwith it.
node is disconnected from the server, or whether an update has reached 3 other
nodes. Once the conditions are satisfied, the routing policy uses the B Action
to inform the blocking policy so that the operation can continue.
4.3.3 Stored Events
Many systems look up or maintain persistent state to make routing de-
cisions. For example, in a client-server system, routing policy needs to look up
the identity of the server in order to determine who to establish subscriptions
to. In a publish/subscribe system, the routing policy may need to look up or
maintain the sets of objects for which to establish subscriptions.
Supporting this need is challenging both because we want an abstrac-
tion that meshes well with our event-driven programming model and because
the techniques must handle a wide range of scales. In particular, the abstrac-
tion must not only handle simple, global configuration information (e.g., the
server identity in a client-server system like Coda [49]), but it must also scale
up to per-file information (e.g., which nodes store the gold copies of each object
36

in Pangaea [77].)
PADS defines a new abstraction, the stored events primitives, in order
to store and retrieve events from a data object in the underlying persistent
object store. Table 4.3 details the full API for stored events. A Write Event
stores an event into an object and a Read Event causes all events stored in
an object to be fed as input to the routing program. The API also includes
Read and Watch to produce new events whenever they are added to an object,
Stop Watch to stop producing new events from an object, and Delete Events
to delete all events in an object.
The stored events primitives enable routing policy to implement various
scenarios intuitively in the event-driven fashion.
For example, in a client-server system, clients need to know the iden-
tity of the server to contact. At configuration time, the installer writes the
event <add server, serverID> to the object /config/server. At startup,
the routing policy generates a <read event, /config/server> action that
looks up the /config/server object. The add server event is retrieved from
the object which, in turn,triggers actions in the routing policy to establish
subscriptions to the server.
In a hierarchical information dissemination system, a parent p keeps
track of what volumes a child subscribes to so that the appropriate sub-
scriptions can be set up. When a child c subscribes to a new volume v, p
stores the information in a configuration object /subInfo by generating a
37

<write event, /subInfo, child sub, p, c, v> action. When this infor-
mation is needed, for example on startup or recovery, the parent generates
a <read event, /subInfo> action that causes a <child sub, p, c, v>
event to be generated for each item stored in the object. The child sub
events, in turn, trigger actions in the routing policy that re-establish subscrip-
tions.
In some client-server systems [49], a client maintains a list of objects to
prefetch from the server (i.e. a hoard list). The routing policy can store an item
on the hoard list by using the write event action to store the <hoard item,
objId> event into the persistent object /config/[nodeID]/hoardlist. Later
when the policy wishes to walk the hoard list to prefetch objects, it can use
the read event action to produce all hoard item events stored in the hoard
list. The production of these events, in turn, activates policy actions to fetch
an item from the server.
In Pangaea [77], each file’s directory entry includes a list of gold nodes
that store copies of that file. To implement such fine-grained, per-file routing
information, a PADS routing policy creates a .meta object for each directory,
stores the gold node information for each of its children as <file entry,
objId, goldNodeList>, and updates a file’s file entry whenever the file’s
set of gold nodes changes (e.g., due to a long-lasting failure). When a read
miss occurs, the routing policy produces the stored file entry event from the
parent .meta object, and this event activates rules that route a read request
to one of the file’s gold nodes.
38

4.4 R/OverLog
In order to make it easier to write routing policies, PADS provides
designers with a domain specific language, R/OverLog—a declarative language
based on OverLog [56] network routing language.
The advantage of using R/OverLog for policy specification is three-
fold: First, R/OverLog is event-driven so it fits well with the PADS paradigm.
Second, since R/OverLog is based on a network routing language, it allows
policies to use the same interface to do network management and invoke PADS
actions based on network events. For example, a policy can easily specify
“add a subscription when a peer is detected”. Third and most importantly,
because PADS uses the routing abstraction for replication, for which OverLog
and R/OverLog have been specially designed, complex policies can be easily
and concisely specified. Statements in an R/OverLog program closely follow
pseudocode, making programs easy to write. Also, most R/OverLog programs
fit in a couple of pages making it easier to do design reviews. Granted that
there is a learning curve to learn R/OverLog, but the compactness of policies
and the ease with which they can be written make the effort worth-while.
Since PADS mechanisms are written in Java, a R/OverLog routing
policy is translated into Java and is compiled before being instantiated over
the mechanisms. This section provide details of the R/OverLog language
semantics. Details of how R/OverLog is translated into Java are provided in
Chapter 7.
39

4.4.1 R/OverLog Language Semantics
A R/OverLog program defines a set of tables and a set of rules. Tables
store tuples that represent internal state of the routing program, whereas rules
define the logic of the program and are fired when events occur. We discuss
each part of the language semantics in turn.
4.4.1.1 Tuples, Events and Data Types
Tuples represent the state of an R/OverLog program and are stored in
tables. Every tuple has a name and consists of a series of fields. An event can
be considered as a special case of a tuple that is not stored in a table.
Since R/OverLog is a typed-language, it defines 5 data types for fields:
• int: an integer (For example, 1)
• float: an float (For example, 3.56)
• boolean: a boolean value (For example, true)
• string: a string of characters enclosed in double quotes (For example,
"orange")
• location: network address of a node, including the hostname or IP
address and port number. (For example, myhost.mydomain.com:5000)
In order to define field types, type declaration statements need to be
used as follows:
40

tuple <name>(location [, type*]).
where name is string that starts with a lower-case letter. The first field of a
tuple or an event must be of the location type. The location represents the
node in the tuple is stored or the node to which the event should be sent. For
example, the following type declaration:
tuple neighbor(location, location, float).
declares a neighbor tuple with 3 fields: 2 locations and 1 float.
In practice, it is not necessary to explicitly write tuple declarations for
all tuples in the program. The number and types of fields are inferred from
their use in program rules. However, if type information cannot be inferred,
an error is reported and a tuple declaration is needed.
4.4.1.2 Tables and Facts
Tables store the state of the program as tuples. They must be explicitly
defined via materialization statements that specify the name of the table, how
long the tuples are retained, the maximum number of tuples stored in the
table, and the fields making up the primary key. For example, the following
table declarations
materialize (neighbor, 10, infinity, keys(1,2)).
materialize (sequence, infinity, 1, keys(1)).
define two tables: first, a neighbor table whose tuples are retained for 10
seconds, has unbounded size, and the primary key of the table is made up of
41

the first two fields; second, a sequence table that stores only 1 tuple (i.e. the
latest one added to the table) indefinitely and primary key of the table is the
first key of the sequence tuple. Note that table names, like tuple and event
names, always being with a lower-case letter.
Tuples are added to tables when they are generated due to an execution
of a rule or are hard-corded in the program as facts. For example, the following
statements
neighbor(host1.mydomain.com:5000, host2.mydomain.com:5000, 3).
neighbor(host1.mydomain.com:5000, host3.mydomain.com:5000, 0.5).
add two tuples to the neighbor table.
4.4.1.3 Timing Events
R/OverLog consists of a built-in event generator periodic that is gen-
erates events at periodic intervals. For example, the following rule:
r0 refreshEvent(@X):- periodic(@X, 5, -1).
generates a refreshEvent event every 5 seconds. The second field in the periodic
tuple specifies the length of the period (in seconds), and the third field specifies
the number of events that should be generated. The value -1 specifies that
events should be generated as long as the program is running
4.4.1.4 Rules
The logic of the program is written as a set of rules. Rules have the
form:
42

<ruleId> <head>:- <body>.
The ruleId is a string identifier for the rule. The head of the rule
specifies the events or the tuples generated when the rule is fired (i.e. executed)
Generated events fire other rules. All generated tuples are added to their
corresponding tables. The body of the rule specifies the constraints that must
hold in order for the rule to fire. It consists of at most one event, table lookups,
variable assignments, and constraints separated by commas. The commas are
interpreted as an AND logical construct. Variables in the body begin with
upper-case letters. Consider the follow rules:
r1 refreshSeq(@X, NewSeq):-refreshEvent(@X), sequence(@X, Seq), NewSeq=Seq+1.
r2 sequence(@X, NewSeq):-refreshSeq(@X, NewSeq).
The variable X and the at sign (@) represent the node at which the program is
running. The rule r1 specifies that whenever a refreshEvent is received, the
sequence number is looked up from the sequence table and is incremented. A
new refreshSeq event is generated with the new sequence number. The rule
r2 stores the new sequence number back in the sequence table.
Note the at sign(@) is also used to send an event to other nodes. Con-
sider the following rule.
p1 ping(@Y, X):-doPing(@X), neighbor(@X, Y, ).
43

When a doPing event is received, the rule p1 looks up the neighbor table and
sends a ping event to every neighbor, represented by @Y. The underscore sign
( ) is a wild-card and matches any value.
The body of a rule must conform to the following two constraints: First,
all table lookups and events in the body of a single rule must be localized to a
single node. Second, the body consists of at most one event. In the case that
the body as no event, the rule is fired whenever a new tuple is added to the
tables specified in the body.
In order to delete a tuple from a table, the head of rule contains the
delete keyword. For example, the following rule
d1 delete neighbor(@X, Y, L):-removeNeighbor(@X), neighbor(@X, Y, L),Y==host2.mydomain.com:5000.
removes from the tuple for host2 from neighbor table.
The R/OverLog program exits if a rule with the tuple exit(@X) is
generated due to the firing of a rule.
4.4.1.5 Aggregates
R/OverLog allows a rule to carry out aggregation on the tuples that
match the constraints in the body. For example, the following rule is fired by
the checkStatus event, looks up the neighbor table and finds the minimum
latency to generate the minLatency event.
minLatency(@X, a MIN<L>):-checkStatus(@X), neighbor(@X, , L).
44

Other supported aggregates include finding the maximum or average value of
a field ( a MAX /a AVG), counting the number of matched tuples (a COUNT), and
picking a random value (a RANDOM). Note that aggregates are specified in the
head of the rule and not the body.
4.4.1.6 Functions
R/OverLog defines two built-in functions that can be used for specifying
assignments or conditions in the body: f now() returns the current clock
time as an integer and f rand() returns a random float between 0 and 1.
For example, the following rule generates a currTime event that contains the
current clock time every minute.
t1 currTime(@X, T) :- periodic(@X, 60, -1), T= f now().
For ease of specification, programmers can extend R/OverLog to de-
fine their own functions. They must declare the function in the R/OverLog
program and define it in the R/OverLog runtime (refer to Chapter 7). For
example, the following function defines a f getParent function that takes in
a string argument and returns a string.
fun string f getParent(string).
4.4.1.7 Watch Statements
Watch statements are used to print local events or table updates. and
are useful debugging tools. For example, the following statement prints every
45

ping event received or generated.
watch(ping).
4.4.2 R/OverLog Policies
The routing policy is written as an R/OverLog program. In order to
support the routing policy API, the underlying layer inserts triggers as events
into the R/OverLog program and whenever an event that matches an action
is generated by a rule, it invokes the appropriate mechanism primitive. For
example, the follow rule:
sub01 addInvalSub(@X, S, X, Obj, CTP):-operationBlock(@X, Obj, Off, Len, BPoint, ),serverId(@X, S), CTP = "CP",BPoint == "readNowBlock".
specifies that whenever node X receives a operationBlock trigger informing
it of an operation that is blocked at the readNowBlock blocking point, it
should look up the server id from the serverId table, and produce an event
addInvalSub event that will invoke the action to establish a subscription from
the server for the object with check point catchup.
Hence, for a rule in the routing policy, the input event a trigger injected
from the data plane, a stored event injected from the data plane’s persistent
state, or an internal event produced by another rule on a local machine or a
remote machine. Every rule generates a single event that invokes an action in
the data plane, fires another local or remote rule, or is stored in a table as a
tuple.
46

4.4.3 R/OverLog vs. OverLog
The first version of our prototype employed OverLog as the language
for writing routing policies. Unfortunately, the runtime to execute OverLog
was slow, unstable, and did not provide a consistent rule execution model. We
realized that even though the language was good for policy specification, the
runtime made it impossible to use. Hence, we developed our own language
and execution runtime for PADS. The main differences between R/OverLog
and OverLog are as follows:
R/OverLog restricts a rule from doing remote table lookups. In other
words, for a single rule, all the right side predicates (i.e. the triggering event
and table lookups) reside on the same node. Since all communication between
nodes are carried out with explicit message transfers, it was easier to implement
an efficient runtime for R/OverLog.
R/OverLog implements fixed point semantics making it easier to reason
about rule execution. The semantics guarantees that all rules triggered by the
appearance of the same event are executed atomically in isolation from one
another. Once all such rules are executed, their table updates are applied,
their actions are invoked, and the events they produce are enqueued for future
execution. Then, another new event is selected and all of the rules it trig-
gers are executed. The original OverLog runtime did not support fixed-point
semantics, but subsequent implementation have added support for it.
R/OverLog adds an interface to insert and receive events from a run-
47

ning R/OverLog program. This interface is important for PADS to inject
triggers to and receive actions from the policy. On the other hand, the Over-
Log runtime was not designed to receive external events. R/OverLog also adds
type information to events making the language safer.
Finally, in order to execute a R/OverLog program, it needs to be trans-
lated to Java and compiled before it can run on the provided runtime. Over-
Log, on the other hand, executes directly on its runtime. The design and the
implementation of the runtime is detailed in Section 7.2.2.
4.5 Summary
Routing policy specifies how data and metadata flow in a distributed
storage system. This chapter defines the primitives by PADS to support in-
formation routing as well as the policy API provided to designers for easy
specification. Routing policy is written as an event-driven program as a set of
rules in R/OverLog, a declarative language designed for this purpose, over an
API comprising of a set of actions that set up data flows, a set of triggers that
expose local node information, and a set of stored events to store and retrieve
persistent state.
48

Chapter 5
Blocking Policy
The second part in the development of storage systems consists of writ-
ing blocking policies to specify the consistency and durability requirements.
In order to to be useful, PADS needs to make it easy to implement a wide
range of semantics. This chapter defines what constitutes blocking policy and
specifies the primitives PADS provides for writing blocking policy.
5.1 What is Blocking?
The consistency and durability guarantees required by different systems
fall on a broad spectrum. Some require weaker guarantees such as eventual
consistency [26], whereas others may implement stronger guarantees such as
linearizability [94] or sequential consistency [53]. Some systems may differenti-
ate between tentative and committed updates [86] and use different policies for
update commitment. For some systems, persistence of an update on a single
node is sufficient [69], whereas for others, an update needs to be persistent on
all nodes [88].
One approach is to pre-implement standard consistency and durability
semantics as libraries and allow designers to pick the one they need. However,
49

since the libraries are pre-defined, this approach does not allow designers to
implement customized semantics or take advantage of the knowledge of the
system to construct a more efficient implementation.
PADS takes a different approach: it provides designers with sufficient
information about the consistency state of local objects so that they can im-
plement their own consistency and durability guarantees. Since the state is
automatically maintained by the mechanisms layer, designers do not need to
write tricky bookkeeping code.
PADS casts consistency and durability as blocking policy because each
defines the circumstances under which the processing of a request or the return
of a response should block or continue. In particular, enforcing consistency
semantics generally requires blocking reads until a sufficient set of updates
is reflected in the locally accessible state, blocking writes until the resulting
updates make it to some or all of the system’s nodes, or both. Similarly,
durability policies often require writes to propagate to some subset of nodes
(e.g., a central server, a quorum, or an object’s “gold” nodes [77]) before the
write is considered complete or before the updates are read by another node.
PADS considers these durability and consistency constraints as invari-
ants that must hold when an object is accessed. The system designer specifies
these invariants as a set of predicates that block a read request, a write request,
or the application of a received update to local state until the predicates are
satisfied. To that end, PADS (1) defines 5 blocking points for which a system
designer specifies predicates, (2) provides 4 built-in conditions that a designer
50

can use to specify predicates, and (3) exposes a B Action interface that allows
a designer to specify custom conditions based on routing information. The
set of conditions for each blocking point makes up the blocking policy of the
system.
This small set of primitives is sufficient to specify any order-error or
staleness error constraint in Yu and Vahdat’s TACT model [94] and imple-
ment a broad range of consistency models from best effort coherence to delta
coherence [81] to causal consistency [52] to sequential consistency [53] to lin-
earizability [94].
5.2 Blocking Points
PADS defines five points for which a policy can supply a predicate and
a timeout value to block a request until the predicate is satisfied or the timeout
is reached. The first three are the most important:
• readNowBlock blocks a read until it will return data from a moment that
satisfies the predicate. Blocking here is useful for ensuring consistency
(e.g., block until a read is guaranteed to return the latest sequenced write.)
• writeAfterlock blocks a write request after it has updated the local object
but before it returns. Blocking here is useful for ensuring consistency
(e.g., block until all previous versions of this data are invalidated) and
durability (e.g., block here until the update is stored at the server.)
51

• applyUpdateBlock blocks an invalidation received from the network be-
fore it is applied to the local data object. Blocking here is useful to
increase data availability by allowing a node to continue serving local
data, which it might not have been able to if the data had been invali-
dated. (e.g., block applying a received invalidation until the corresponding
body is received.)
PADS also defines writeBeforeBlock to block a write before it modifies the
underlying data object and readEndBlock to block a read after it has retrieved
data from the data plane but before it returns.
5.3 Blocking Conditions
PADS defines a set of predefined conditions, listed in Table 5.3, to
specify predicates at each blocking point. A blocking predicate can use any
combination of these conditions. The first four conditions provide an interface
to the consistency bookkeeping information maintained in the data plane on
each node.
• isValid requires that the last body received for an object is as new as the
last invalidation received for that object. isValid is useful for returning
the latest known version of the object and for maximizing availability
by ensuring that invalidations received from other nodes are not applied
until they can be applied with their corresponding bodies [26, 64].
52

Predefined Conditions on Local Consistency StateisValid Block until node has received the body corre-
sponding to the highest received invalidation forthe target object.
isComplete Block until target object’s consistency state re-flects all updates before the node’s current logicaltime.
isSequencedVV|CSN
Block until object’s total order is established viaGolding’s algorithm (VV) [31] or an explicit com-mit (CSN) [69].
maxStalenessnodes, count, t
Block until all writes up to(operationStartTime-t) from count nodes in nodeshave been received.
User Defined Conditions on Local or Distributed StateB Actionevent-spec
Block until an event with fields matching event-spec is received from routing policy.
Table 5.1: Conditions available for defining blocking predicates.Note: for the maxStaleness condition, setting nodes and count to -1 represents all nodes in
the system.
• isComplete requires that a node has received all invalidations for the
target object up to the node’s current logical time. Since routing policies
can direct arbitrary subsets of invalidations to a node, a node may have
gaps in its consistency state for some objects. isComplete specifies that
no such gap exists. If the predicate for readNowBlock is set to isValid
and isComplete, reads are guaranteed to see causal consistency.
• isSequenced requires that the most recent write to the target object has
been assigned a position in a total order. Policies that ensure sequential
or stronger consistency can use the AssignSeq routing action (see Table
4.3.2) to allow a node to sequence other nodes’ writes and specify the
isSequenced condition as a readNowBlock predicate to block reads of un-
53

sequenced data. Alternatively, a variation of isSequenced can regard a
write as sequenced when its logical time is earlier than the latest update
a node has received from all other nodes in the system; at that point, no
earlier updates can arrive, and a total order is well defined [31].
• maxStaleness is useful for bounding real time staleness.
The fifth condition on which a blocking predicate can be based on is
B Action. A B Action condition provides an interface with which a routing
policy can signal an arbitrary condition to a blocking predicate. An operation
waiting for event-spec unblocks when the routing rules produce an event whose
fields match the specified event-spec.
Rationale. The first four, built-in consistency bookkeeping primitives ex-
posed by this API were developed because they are simple and inexpensive
to maintain within the data plane [16, 97] but would be complex or expensive
to maintain in the control plane. Note that they are primitives, not solu-
tions. For example, to enforce linearizability, one must not only ensure that
one reads only sequenced updates (e.g., via blocking at readNowBlock on isSe-
quenced) but also that a write operation blocks until all prior versions of the
object have been invalidated (e.g., via blocking at writeEndBlock on, say, the
B Action allInvalidated which the routing policy produces by tracking data
propagation through the system).
54

Beyond the four pre-defined conditions, a policy-defined B Action con-
dition is needed for two reasons. The most obvious need is to avoid having to
predefine all possible interesting conditions. The other reason for allowing con-
ditions to be met by actions from the event-driven routing policy is that when
conditions reflect distributed state, policy designers can exploit knowledge of
their systems to produce better solutions than a generic implementation of the
same condition.
For example, in the client-server system we describe in Chapter 9, a
client blocks a write until it is sure that all other clients caching the object
have been invalidated. A generic implementation of the condition might have
required the client that issued the write to contact all other clients. However,
a policy-defined event can take advantage of the client-server topology for a
more efficient implementation. The client sets the writeEndBlock predicate to
a policy-defined writeComplete event. When an object is written, an invali-
dation is sent to other clients via the server. When other clients receive an
invalidation, they send acknowledgements to the server. The server gathers
acknowledgements from all other clients and generates a writeComplete action
for the client that issued the write. In this custom scheme, the client that
issued the write only needs to contact the server rather than all other clients.
Conversely, in an earlier version of the interface, we included a built-in
predicate hasPropagated(nodes, count, p), which allowed a node to block until
its pth most recent write had propagated to at least count nodes out of the
list of nodes in nodes. This condition is potentially useful because it maps
55

directly to Yu and Vahdat’s order error condition for implementing tunable
consistency [94]—it provides a way to wait until a write is durably stored at
a quorum of servers. However, our built-in implementation of this primitive
had a node poll other nodes directly to determine when a write had reached
them, which makes sense for some systems but not others. By constructing
such a condition using the B Action primitive instead, a designer can gather
the same information in a natural way for a particular system. For example, if
the nodes are set up in a star topology, instead of having every node keep track
of where its writes have propagated, it is more natural to implement routing
rules so that the center node keeps track of update propagation and informs
the original writer when the update has propagated to sufficient nodes. The
routing policy then generates an appropriate message for the blocking policy,
that was waiting on the B Action primitive.
5.4 Examples
This section describes how PADS blocking primitives can be used to
implement a wide range of consistency semantics from (weak) monotonic coher-
ence to (strong) linearizability. To implement stronger semantics, the blocking
policy makes extensive use of the B Action condition. It relies on the routing
policy to ensure that the necessary invariants are satisfied before generating
a message for the blocking policy to unblock the operation. We describe be-
low how various semantics can be implemented and the requirements from the
routing policy when the B Action condition is specified.
56

5.4.1 Monotonic-read coherence
Monotonic-read coherence is one of the weakest reasonable consistency
semantics for distributed storage. It specifies that if a node reads the value of
an object, any successive read operation by that node will always return the
same value or a more recent version.
PADS guarantees monotonic-read coherence by default because the
mechanisms layer replaces the body of an object only if a newer version is
received. By setting the blocking points to the default true predicate, read
and write operations continue without blocking and coherence is guaranteed.
5.4.2 Delta Coherence
Delta coherence [81] specifies that a read of a data object returns the
last value that was produced at most delta time units preceding that read
operation.
In order to implement delta coherence in PADS, the readNowBlock is
set to the predicate maxStaleness(-1,-1, delta) AND isValid. The maxStaleness
condition ensures that only updates that have occurred in the past delta time
units are read. The isValid condition ensures that the body read matches the
update. Note that if the isValid condition is not specified, then there is no
guarantee that the body matches the latest invalidation received, and therefore
a read may return a much older body, violating delta coherence.
An alternate implementation is to set the readNowBlock to maxStaleness(-
57

1, -1, delta) and the applyUpdateBlock to isValid. By setting the applyUpdate-
Block to isValid, we ensure that all locally stored bodies match the latest
invalidations received (i.e. all local objects are valid). However, this imple-
mentation may reduce the amount of data that can be read. Invalidations are
received in causal order but bodies can be received in any order. If the body
of an invalidation is delayed, then the its application and all subsequently re-
ceived invalidations will be delayed (even though their bodies may have already
arrived). By the time the required body arrives and all received updates are
applied, it may be too late. Therefore, by setting the isValid condition for the
readNowBlock instead, we prevent application of updates from being delayed
and thus increasing the chances of meeting the temporal deadline.
5.4.3 Causal Consistency
Causal consistency defines that writes that potentially are causally re-
lated are seen by every node of the system in the same order. Concurrent
writes (i.e. ones that are not causally related) may be seen in different order
by different nodes [13].
In order to guarantee causal consistency in PADS, the readNowBlock
is set to isComplete AND isValid. The isComplete condition guarantees that,
for the target object, the locally stored meta-data reflects the latest update
in casual order up to the node’s current logical time and the isValid condition
guarantees that the body returned matches that update. If the isComplete
condition is not used, then it is possible that the local version is causally much
58

older than the versions of other objects stored and reading it would lead to a
violation of causal order. Chapter 6 details how causality is maintained in the
underlying data layer.
5.4.4 Sequential Consistency
Sequential consistency [53] specifies that the results of any execution
is the same as if all operations (reads and writes) were executed in some
sequential order and operations of each individual processor appear in this
sequence in program order.
Sequential consistency can be implemented in PADS as follows: First,
when a write occurs at a node, the write is blocked until all other all other
copies of the object have been invalidated. This ensures that future reads can-
not return old values that existed before the write. The blocking policy sets
the writeAfterBlock to B Action invalidatedAll and relies on the routing policy
to ensure that all other copies have been invalidated. In a fully-connected
and full-replication scenario, the routing policy implements rules that send an
ACK to the original writer whenever a node receives an invalidation. When
sufficient ACKS have been collected, the routing policy generates an invali-
datedAll message for the blocking policy. Second, after all the ACKS have been
received, the routing policy implements a commit protocol to assign the write
a position in the total order. The protocol can use a primary-commit scheme
or Golding’s algorithm to determine the order. The routing policy uses the
AssignSeq action to indicate that the write has been assigned a fixed position
59

in the total order. Finally, a read only returns the version of an object if the
write that wrote is the last write for that object has been sequenced. Note that
because invalidation subscriptions transmit the commit information along with
invalidations in causal order, reading valid, complete, and sequenced objects
is consistent with the total order determined by the commit protocol. There-
fore, the readNowBlock is set to isSequenced AND isValid AND isComplete.
This scheme is satisfies the two requirements (i.e. program order and write
atomicity) defined by Adve et. al. [11] for enforcing sequential consistency.
5.4.5 Linearizability
Linearizability guarantees that each operation (read or write) takes ef-
fect instantaneously at some point between its invocation and its response [40].
Linearizability is similar to sequential consistency in the sense that all opera-
tions appear to have executed in some sequential order. However, linearizabil-
ity has the additional requirement that the sequential order is consistent with
the global order (i.e. real-time order).
In order to implement linearizability, we add an additional condition
to the sequential consistency implementation to ensure that the total order is
consistent with the real-time write order: the system ensures that only one
write occurs at a time and that the invalidation for that write propagates to all
other nodes before another write is allowed. This scheme can be implemented
by defining a write token that a node needs to posses. The management of
the token is carried out by routing rules. Before a write, a node checks if it
60

has the token (i.e. the writeBeforeBlock is set to B Action getToken). If it
gets the token, it continues with the write. If not, it blocks until receives the
token. Like the sequential consistency implementation, the writeAfterBlock is
set to B Action invalidatedAll to ensure that the write completes only after
all nodes have acknowledged that they have received the update. Once the
node receives ACKS from all other nodes, it commits the update by using
the AssignSeq action and gives up the token so that another blocked write
can continue. The readNowBlock is set to isSequenced AND isValid AND
isComplete so that only valid, complete, and sequenced objects are read.
5.4.6 TACT
TACT [94] defines a continuous consistency model based on 3 parame-
ters: numerical error, order error, and staleness. Numerical error defines the
maximum number of writes not seen by a replica (i.e. unseen writes). Order
error defines the maximum number of writes that have not established their
commit order at the local replica (i.e. uncommitted writes). Staleness de-
fines the maximum amount of time before a replica is guaranteed to observe
a write accepted by a remote replica (i.e. the maximum staleness of the data
observed).
Default conditions. The weakest semantics that TACT guarantees is ca-
sual consistency. The default blocking predicates are set follows: the read-
NowBlock is set to isValid AND isComplete and the applyUpdateBlock is set
61

to isValid so that local data is always valid (for availability).
Numerical error. One way to support the numerical error constraint is to
block reads if the number unseen writes exceeds the specified bound. The
routing policy is defined such that every node maintains information about
how many writes have occurred at other nodes that it has not yet received.
Whenever a node writes to an object, it informs other nodes of its write. The
writeAfterBlock predicate is set to B Action informedAll to ensure that the
write completes only when other nodes are aware of the write. Also, before
reading an object, the node checks with its routing policy to ensure that the
number of writes it has not seen does not exceed the numerical error bound.
This can be implemented by adding the condition B Action okToRead to the
readNowBlock. When the routing policy is informed of the read block due
to the B Action predicate, it checks to see if the numerical error bound is
satisfied. If so, it generates the okToRead message. If not, it will establish
data flows to ensure ensure that the bound is satisfied before unblocking the
read.
Depending on the topology of the system, it might be more efficient
for a single primary node to keep track of the number of unseen writes in
the system. In that case, whenever a local write occurs or when a remote
write is received, the node informs the primary and before a read, the node
checks with the primary node to ensure that the read can continue. For this
scheme, the blocking conditions still remain the same, but the routing policy
62

is implemented differently.
An alternate way to implement the numerical error constraint is to not
accept a write unless it is known for certain that the write will not violate the
numerical error bound. In this scheme, the routing policy of every node (e.g.,
A) maintains an unseen writes vector that keeps track of the number of local
writes that have not been seen by another node (e.g., B), and a bound vector
that specifies the upper bound on number of writes that A can accept without
B seeing those writes. The blocking policy defines the writeBeforeBlock to
B Action okToWrite and the writeAfterBlock to B Action informedAll. Note,
this scheme is equivalent to the implementation mentioned in [43].
Order error. In order to implement the order error bound, writes are blocked
if the number of local writes that are uncommitted violate the bound. For this
scheme, the routing policy at each node keeps track of how many local writes
have not been committed yet. The system can use any commit policy (e.g.,
a primary-commit scheme or Golding’s algorithm [31]) as long as the routing
policy is informed of the commit. The blocking policy adds to readNowBlock
the condition B Action okToRead. It is expected that the routing policy gen-
erates the okToRead message only if the number of uncommitted writes are
within the order error bound. If not, the routing policy initiates data flows so
that the bound can satisfied.
63

Staleness. In order to the staleness bound, the maxStaleness(-1, -1, bound)
condition is added to the readNowBlock. This ensures that reads will be
blocked if the current replica is considered to be stale. Note this scheme
is similar to the one described in [43].
5.4.7 Two-phase Commit
The two-phase-commit protocol is often employed to commit transac-
tions among a set of nodes. One node is designated as the co-ordinator which
initiates the commitment protocol and the other nodes are considered as par-
ticipants. The protocol is executed in the following steps:
• Step 1: At the end of the transaction, the co-ordinator sends a vote
message to participants indicating that the transaction is ready for com-
mit.
• Step 2: On receiving the vote message, every participant replies with ei-
ther a yes message or a no message depending on whether it can commit
the transaction.
• Step 3: If the co-ordinator receives a yes message from all participants, it
commits the transaction and sends a commit message to the participants.
Otherwise, the co-ordinator aborts the transaction and sends an abort
message instead.
• Step 4: On receiving a commit or an abort message, the participant
either commits or aborts the transaction accordingly and sends an ack
64

message to the co-ordinator.
• Step 5: After receiving the ack messages, the protocol is considered
complete (i.e. the transaction is either committed or aborted on all
nodes).
In PADS, we implement the two-phase commit protocol for a single
write rather than for a transaction. The writer acts as the co-ordinator of the
protocol. We assume that invalidation and body subscriptions are established
between the writer and all other nodes. The blocking policy is set as follows:
the applyUpdateBlock is set to isValid, the writeAfterBlock is set to B Action
2PC-Complete and the readNowBlock is set to isValid and isCommitted. The
routing policy implements the protocol as follows:
• Step 1: When a write occurs, the update is sent to other nodes via
subscriptions. This update is considered as the vote message of the
protocol.
• Step 2: When the participant receives the update (i.e. the precise in-
validation), it sends a yes message to the co-ordinator (a.k.a. the co-
ordinator). Note that in this implementation, a participant cannot cast
a no vote.
• Step 3: Once the co-ordinator receives the yes message from all other
nodes, it will commit the write using the AssignSeq action. This action
will cause the underlying layer to generate a commit invalidation that
65

is sent to all other nodes via subscriptions. The commit invalidation
serves as the commit message of the protocol. If the co-ordinator does
not hear back from all nodes in time, it aborts the write. In PADS,
aborting a write is equivalent to not committing a write. In this case,
the co-ordinator simply does nothing.
• Step 4: On receiving the commit invalidation, the participants send an
ack message to the co-ordinator. Note that the underlying layer will au-
tomatically commit the write when the commit invalidation is received.
• Step 5: If the write was aborted in Step 3, the co-ordinator generates a
2PC-complete message to the blocking layer to unblock the write. Oth-
erwise, the co-ordinator waits for ack messages from the participants
before generating the 2PC-complete message for the blocking layer.
5.5 Summary
In PADS, consistency and durability guarantees of a distributed storage
system are cast as conditions that must be satisfied before and after access
to data. These conditions are considered as part of the blocking policy of
the system. For specifying blocking policy, PADS defines five blocking points
in the data plane’s processing of read, write, and receive-update actions. At
each blocking point, a designer specifies a blocking predicate that indicates
when the processing of these actions must block. A blocking predicate can use
any combination of the five pre-defined blocking conditions and the extensible
66

condition.
67

Chapter 6
The Mechanisms Layer
In PADS, the mechanisms layer has two main responsibilities: first, it
implements the primitives defined by the policy layer, and second, it ensures
that implementation is flexible and efficient. As a result, with the low-level
details taken care of by the mechanisms, system designers only need to focus
on writing higher level policy.
This chapter focuses on the primitives provided by mechanisms layer in
order to support the policy API. A more complete discussion of the PRACTI
mechanisms layer on which PADS is based is available in Zheng’s disserta-
tion [96] as well as in other publication [16] and technical report [97]. We
include a discussion of the mechanisms here for context and for completeness.
6.1 Overview
The policy layer has defined primitives that provide designers with
sufficient options to build a wide range of systems. The flexibility is useless
if the underlying mechanisms layer cannot support these options efficiently.
It is, therefore, imperative that the primitives are implemented such that the
constructed systems do not pay high costs for generality.
68

!"#$%&'
(&)*$'
+,-.&$'/)0'
1)2343&$2%5'
6))77$$,420 '
1)88924%.
:)2'
;)-9<$'
Subscriptions Read/Write/
Delete
Storage Module /)%.<'=
%%$33''=
>?'
Figure 6.1: Internal structures of the mechanisms layer.
The mechanisms layer must satisfy three requirements:
• For basic operation, it must provide locally accessible data storage for
any subsets of data.
• For routing policy specification, it must implement the subscription
primitive so that all PR-AC-TI properties can be supported.
• For blocking policy specification, it must maintain sufficient consistency-
related book-keeping so that blocking conditions can be supported.
In order to meet the above requirements, as depicted in Figure 6.1, the
mechanisms layer consists of the following parts:
• a storage module that stores data objects and information about updates
locally.
• a communication module that implements a flexible synchronization pro-
tocol in order to support subscriptions.
69

• a consistency bookkeeping module that keeps track of the consistency
state of objects stored locally.
We detail each module in subsequent sections.
6.1.1 Basic Model
Data objects. In PADS, data are stored as objects identified by unique ob-
ject identifier strings. Sets of objects can be compactly represented as interest
sets that impose a hierarchical structure on object IDs. For example, the inter-
est set “/a/*:/b” includes object IDs with the prefix “/a/” and also includes
the object ID “/b”. In addition, an interest set is also used to represent the
set of objects a node is interested in replicating locally.
Keeping time. The mechanisms layer heavily relies on Lamport’s clocks [52]
and version vectors to keep logical time and consistent information. Every
node maintains a time stamp, lc@n where lc is a logical counter and n the
node identifier. To allow events to be causally ordered, the time stamp is
incremented whenever a local update occurs and advanced to exceed any ob-
served event whenever a remote update is received. Every node also maintains
a version vector, currentV V , that indicates all the local or remote updates it
is aware of. The currentV V is a representation of the current logical time of
the node.
70

Invalidations and bodies. Whenever an object is updated an invalidation
and a body is generated. An invalidation contains the object ID and the logical
time of the update. A body contains the actual data of the update in the case
of the write. When an object is assigned a sequence or is deleted, only an
invalidation is generated.
6.2 Local Storage Module
The storage module stores data and updates in an objects store and an
update log. It also provides an API so that applications can access the data
stored in a node.
6.2.1 Update Log and Object Store
The update log stores local or received invalidations in causal order. In
order to prevent the log from becoming arbitrarily large, the node truncates
older portions of the log when the log hits a locally configurable size limit and
maintains a version vector, omitV V , to keep track of the cut-off time.
The object store stores latest bodies of objects the node chooses to repli-
cate along with per-object meta-data such as the logical time writeT imeStamp,
the real time realT imeStamp and additional consistency-related state (refer
to Section 6.4) for the last-known write to each byte range. When an ob-
ject is deleted, the body is deleted from the object store but the delete time,
deleteAS is maintained.
71

Invalidation type ComponentsWrite Invalidation objId, offset, length, writeTimeStampCommit Invalidation objId, targetTimeStamp, commitTimeStampDelete Invalidation objId, deleteTimeStampImprecise Invalidation targetSet, startVV, endVVBody objId, offset, length, writeTimeStamp, data
Table 6.1: Components of invalidations and bodies
6.2.2 Local Access API
Data stored on a node can be accessed via four methods: read, write,
delete, and commit. The read method requires the object Id and the byte
range, i.e. <objId, offset, length>. When a write occurs, it is assigned a log-
ical time stamp, writeT imeStamp, and a real time stamp, realT imeStamp.
When an object is deleted, a logical time stamp, deleteT imeStamp is as-
signed. The commit method takes in an an object ID, and the time stamp,
targetT imeStamp, of the update it wants to commit. The commit operataion
is also assigned a time stamp, commitT imeStamp, to indicate the logical time
of the commit.
The mechanisms also support multi-object writes. For the ease of dis-
cussion, we only consider single objects writes to whole objects instead of
specific byte-ranges.
Whenever an object is updated (via a write, delete, or commit), an in-
validation and possibly a body is generated. Table 6.1 summarizes the different
types of invalidations and bodies and their components.
When a write occurs, a write invalidation and a body are generated.
72

A write invalidation consists of four fields. The first three fields specify the
object and byte-range was updated. The last field, writeT imeStamp specifies
the time at which the object was updated. A body has an additional field,
data, that stores the actual contents of the update.
When an object is updated via a commit, a commit invalidation consist-
ing of the object Id, objId, the time of the committed write, targetT imeStamp,
and the commit time, commitT imeStamp, is generated. When an object is
deleted, a delete invalidation consisting of the object Id, objId, and the delete
time, deleteAS, is generated.
Another type of invalidation is an an imprecise invalidation It summa-
rizes all the updates that have occurred to a set of objects, targetSet, between
a start time, represented by a partial version vector startV V , and an end
time, another partial version vector endV V . Imprecise invalidations are used
to transfer update summaries from one node to the other (refer to Section 6.3).
On the other hand, write invalidations, commit invalidations and delete inval-
idations are considered to be precise invalidations because they contain the
complete meta-data of an update.
6.3 Communication Module
Propagating data and meta-data among nodes is an important design
aspect of a distributed storage systems. In PADS, it is considered part of
the routing policy. In order to aid the specification of various types of data
propagation, the policy API defines subscription primitive—a uni-directional
73

stream of updates from one node to another. A subscription is associated with
a subscription set, SS, that specifies the set of objects a node is interested
in synchronizing and a start time, startV V , which specifies that only the
updates that have occurred after that time should be sent. It can be seen as
an agreement that the sender will send all updates that it is aware of and that
have occurred after the start time to the objects in the subscription set.
The communication module, in the mechanisms layer, implements a
synchronization protocol that is able to provide all the PR-AC-TI and flexi-
bility properties that subscriptions require and is sufficiently efficient to keep
the costs for generality to a minimum. In particular, the protocol
• sends information that is proportional to the required updates on a syn-
chronization stream (i.e. supporting PR)
• allows any node to establish a stream with any other node (i.e. support-
ing TI)
• sends sufficient information to implement flexible consistency guarantees
but that information is kept to a minimum (i.e. supporting AC)
• supports separate invalidation and body subscriptions
• is incremental
• supports both log-based and state-based synchronization
• efficiently supports dynamic subscription establishment between two nodes
74

Subsequent subsections detail the implementation of the protocol.
6.3.1 Basic Subscriptions
Suppose all the objects stored in Node A lie in the interest set, A.IS and
Node A knows about all updates to A.IS up to its current time, A.currentV V .
Node A wants to receive new updates to A.IS and requests a subscription from
node B with the A.IS as subscription set and A.currentV V as the start time.
If node B stores the same objects as A, i.e. A.IS = B.IS, synchro-
nization is simple. Node B just sends all the updates that have occurred from
A.currentV V to B.currentV V in causal order. A causal steam is used because
it provides flexibility for applications to implement a wide range of weaker or
stronger consistency guarantees with little additional overhead. Also, a causal
stream is incremental, i.e. in case of disconnection, the synchronization can
continue where it left off.
A subscription can be seen as having two phases: a catchup phase in
which the the sender, Node B, sends all updates to objects in the subscription
set from the start time, startV V , to the sender’s currentV V , and a connected
phase in which the sender forwards any new updates it receives until the
subscription is removed (i.e. dismantled).
6.3.2 Separate Invalidation and Body Subscriptions.
In order to provide greater flexibility, PADS separates meta-data and
data synchronization by having separate invalidation and body subscriptions.
75

Invalidation subscriptions propagate meta-data of updates that occurred after
startV V in causal order. They satisfy the prefix property—if an invalidation,I1,
is sent before another invalidation, I2, then I1 causally precedes I2. Body
streams are simply unordered streams of the bodies of updates that occurred
after startV V . Ordering of body streams is unnecessary because received bod-
ies are applied to the object store only after their corresponding invalidations
are received. The causality of invalidation streams is sufficient to guarantee
causal consistency.
In fact, unordered-ness of body subscriptions has its benefits. First, it
allows the propagation of high priority updates before other updates improv-
ing performance and availability. Second, for frequently updated objects, if
multiple bodies to the same object byte-range are sitting in the send queue,
only the latest body can be sent and hence reducing bandwidth [64].
An invalidation stream is associated with a subscription set, SS, a start
time, stream.startV V , and a stream time, stream.V V that keeps track of the
logical time progression of the stream. Since a body stream is unordered, it is
associated with a subscription set, SS and a start time, stream.startV V .
6.3.3 Supporting Flexible Consistency
Say a node wants to receive updates to a subset of data from another
node. In addition to the updates, it is necessary to send enough information
so that systems can enforce whatever level of consistency they require.
Consider the scenario that an invalidation subscription is established
76

from Node B to Node A for the subscription set A.IS. Because of partial
replication, however, different nodes may store different subsets of data. In
other words, Node B may not store all the objects that Node A wants. In
addition to sending all the updates to objects in A.IS, Node B must warn
Node A if there are any causal gaps – updates that have occurred to objects
that Node A cares about but Node B does not have. In this case, Node B sends
an imprecise invalidation. Imprecise invalidations can be seen as a summary of
multiple updates. They summarize updates that occurred to a set of objects,
targetSet, between a start time, startV V , and an end time, endV V . Note that
start and end time are partial version vectors rather than full version vectors.
Note, imprecise invalidations are only sent over invalidation subscriptions and
not body subscriptions.
Imprecise invalidation must be sent in two cases. First, the sender,
Node B, does not know about the updates the receiver, Node A, has asked
for. Second, imprecise invalidations are sent for updates to objects Node A
did not ask for so that Node A can pass on the knowledge of the gaps in its
information to another node, Node C, that it synchronizes with in the future.
It is this propagation of imprecise invalidations allows PADS to simultaneously
support partial replication, topology independence, and still support a broad
range of consistency semantics.
77

6.3.4 State-based Synchronization
PADS also supports state-based synchronization by sending a check-
point of the final state of objects in an interest set instead of sending an
ordered log of updates. A checkpoint consists of an imprecise invalidation for
A.IS from A.stream.startV V to B.currentV V and the latest meta-data of
objects in A.IS updated between stream.startV V and B.currentV V .
Log and checkpoint synchronizations have different tradeoffs. The
bandwidth requirement for log synchronization is always proportional to the
number of updates that occurred to objects in the subscription set. Log syn-
chronization is useful for incrementally and continuously exchanging updates
between pairs of nodes. On the other hand, the bandwidth requirement for
checkpoint synchronization is proportional to the number of objects updated.
Hence, for a small frequently updated subscription set, a checkpoint synchro-
nization might be a better option. Also, a log synchronization is impossible to
execute if the update log has been truncated beyond the start time of the sub-
scription. i.e. the subscription requires invalidations that are older than what
is currently stored in the log. The only option is to fall back to checkpoint
synchronization.
6.3.5 Supporting Efficient Dynamic Subscriptions
Next, what if Node A decides that it wants to synchronize more objects?
Say Node A already has an invalidation subscription established for A.IS
from Node B and it wants get updates for objects in A.newIS from the time
78

Imp Inval
/z/*
No Multiplexing
Receiver Sender
Receiver Sender
Stream
Start
Inval
/x/2
Imp Inval
/y/*:/z/*
Inval
/x/3
Inval
/x/4
Inval
/x/1
Catchup
End
Inval
/y/1
Imp Inval
/x/*:/z/* Inval
/y/2
Imp Inval
/z/*
Stream
Start
Inval
/x/2
Imp Inval
/y/*:/z/*
Inval
/x/3 Inval
/x/4
Inval
/x/1 Catchup
Start
Inval
/y/1
Stream
Start
Inval
/y/3
Inval
/y/2
Inval
/y/3
Imp Inval
/y/*:/z/*
Stream SS = /x/*
Stream SS = /y/*
Redundant Information Sent
With Multiplexing
Stream SS = /x/* Catchup for /y/*: sends missing updates
Stream SS = /x/*:/y/*
Figure 6.2: Diagram comparing the messages sent on invalidation streams without andwith multiplexing.
A.newIS.startV V . A simple approach would be to establish a new separate
stream for A.newIS. The problem is that a lot of redundant information will
be sent—in order to ensure that each stream provides a causally ordered series
of events from stream.startV V , each must include imprecise invalidations for
any omitted events and Node A may receive imprecise invalidations for the
same updates twice. If Node A creates a large number of subscriptions, then
the redundant information sent can be quite substantial.
PADS reduces the overheads of dynamic synchronization requests by
multiplexing subscription requests on to a single stream. Since updates on the
stream are sent in causal order, simply sending updates to A.newIS from the
current logical time of the stream stream.V V will not work because that would
79

not “fix the gap” that Node A has for A.newIS from A.newIS.startV V to
stream.V V . Instead, Node B “pauses” the stream at stream.V V and sends a
catchup stream which includes all updates for A.newIS from A.newIS.startVV
to stream.V V that node B knows about. After catchup, node B continues
sending invalidations for A.IS and A.newIS and gap markers for everything
else starting from stream.V V . Figure 6.2 illustrates the multiplexing of the
stream.
6.3.6 Summary
The following list highlights the features that enable subscriptions to
be flexible and efficient.
• Because subscriptions are peer-to-peer streams, they are able to support
arbitrary synchronization topologies.
• The synchronization set for each subscription is not pre-defined. Hence,
nodes can synchronize arbitrary subsets of data.
• By separating invalidation and body subscriptions, PADS provides the
flexibility to propagate meta-data and data via separate paths.
• The causal propagation of updates provides systems with the flexibility
to build a wide range of consistency semantics and allows synchronization
to make incremental progress between failures.
• By supporting both log-based and state-based synchronization, subscrip-
tions allows systems to make appropriate performance tradeoffs.
80

• By summarizing unwanted meta-data, PADS ensures that updates are
propagated with minimal overhead while supporting partial replication
and guaranteeing causal consistency.
• By multiplexing subscription requests over a single stream, PADS en-
sures that dynamic requests for synchronizations are efficiently handled.
6.4 Consistency Bookkeeping Module
The responsibility of the bookkeeping module is to maintain sufficient
local state in order to support the primitives (i.e. blocking conditions) defined
by the blocking policy API. The advantage of maintaining the state in the
mechanisms layer is that it relives designers from writing tricky bookkeeping
code. Also, since the state maintained is general, designers can quickly adapt
the system if consistency requirements change.
In this section, we discuss the state maintained by the module and how
it is updated as messages are received.
6.4.1 Dimensions of Local Consistency State
In PADS, every node keeps track of the consistency-related state of the
objects it stores. Consistency has three dimensions:
• Preciseness: The interest set is precise if the node has received all the
precise invalidations affecting the objects in the interest set up to the
current logical time, currentV V . An interest set is imprecise, if the
81

node has received imprecise invalidations for any subset the interest set.
An object is precise if it lies in a precise interest set
• Validity: An object is valid if object store contains the body of the last
received write invalidation, else it is invalid.
• Commit: An object is committed if the commit operation or a commit
invalidation is received for the last-known write update.
In fact, different consistency semantics can be guaranteed by reading
objects in specific states. For example, causal consistency can be easily guar-
anteed by accessing only precise and valid objects. Preciseness guarantees that
the node is aware of the latest causal update to the object and validity implies
that the node is storing the body of that update. On the other hand, systems
that do not require causal consistency have the option of accessing data even
from imprecise interest sets.
6.4.2 Local Consistency State
In order to keep track of the consistency of local objects, a node, Node
A, maintains the following state:
• currentV V : Node A maintains a version vector that indicates the latest
update it has seen, either due to a precise invalidation or to an imprecise
invalidation. This implies that Node A is not aware of any updates after
currentV V .
82

• currRealV V : Node A also maintains a vector of real timestamps rather
than logical timestamps of the updates it has received. currRealV V can
be seen as the real-time equivalent of currentV V .
• stream.V V : For every invalidation stream, Node A maintains a logical
time that includes the last update and all the causally preceding updates
received on the stream. It implies that Node A has seen, either via
precise or imprecise invalidations, all events from the stream.startV V
to stream.V V .
• IS.noGapV V : For every interest set, Node A maintains a noGapV V that
indicates that Node A has seen all updates and no imprecise invalidations
to the interest set until this time. For a particular interest set IS1, if
IS1.noGapV V < currentV V then the interest set is considered imprecise
– Node A is missing one or more invalidations that affect IS1 between
IS1.noGapV V and currentV V . Hence, causal consistency cannot be
assured for reads of objects in IS1.
• obj.writeT imeStamp: For every object currently stored, Node A stores
the logical timestamp of the latest write invalidation it has received for
the object.
• obj.realT imeStamp: For every object currently stored, Node A stores
the real timestamp of the latest write invalidation it has received for the
object.
83

Blocking Condition Consistency Module EquivalentisValid obj.isValid = trueisComplete IS.precise = trueisSequenced obj.isCommited = truemaxStaleness count values corresponding tonodes count t nodes in currRealV V are less than
t milliseconds old.
Table 6.2: Mapping between blocking conditions and local consistency state maintained.obj represents the object for which the condition is specified and IS represents the interest
set enclosing the object.
• obj.isV alid: A flag, stored for every object, that indicates whether the
node stores the body of the last received write invalidation for the object.
If the isV alid flag is not set, the object is considered to be invalid. Causal
consistency cannot be assured for a read of that object, because the body
is older than the last invalidation received.
• obj.isCommitted: A flag, stored for every object, that indicates whether
the node has received a commit invalidation for the last received write
invalidation it has received for the object. If the isCommitted flag is
set, the object is considered to be committed.
Note that object-related consistency state is stored in the object store and
interest set-related state is stored in a hierarchical structure called ISSTATUS.
The state maintained at the module is sufficient to implement the block-
ing conditions defined by the blocking policy API. Table 6.4.2 depicts how
blocking conditions can be implemented.
84

6.4.3 Updating the State
When a receiver receives messages on an invalidation or body stream,
in addition to updating the log and the store, the key job for the receiver is to
make sure that the consistency state is correctly updated. We describe below
how incoming invalidation streams and body streams are processed.
Processing incoming invalidation streams. In order to eliminate the
need for updating IS.noGapV V every time an invalidation is received, we
introduce the concept of “attaching” an interest set to a stream. An interest set
is “attached” to a stream if no imprecise invalidations for the interest set have
been received on the stream, i.e. IS.noGapV V includes stream.V V . When
an invalidation is received, only stream.V V needs to be updated. The node
also keeps track of which streams an interest set is attached to by maintaining
a IS.attachedStreams set. If an imprecise invalidation, IMP, is received on
a stream, the IMP.targetSet is “detached” from the stream by explicitly by
storing its noGapV V for the interest set in ISSTATUS. The details of how an
invalidation stream is processed as described in Figure 6.3 and 6.4.
Processing incoming body streams. Processing a body stream is sim-
ple. When a node receives a body, it will check if the body.writeT imeStamp
matches local times stamp for the object, obj.writeT imeStamp. If there is a
match, it implies that the body corresponds to the latest received invalidation
for the object, the body is applied the store and the obj.isV alid flag is set to
85

if received message is a subscription start message, SubStart then//set up subscription stream:stream.SS ⇐ subStart.SSstream.V V ⇐ subStart.V V
else if received message is an write invalidation, I then//update log, timing state and per object state:store I in update logupdate stream.V V and currentV V to include I.writeT imeStamp.update currRealV V to include I.realT imeStamp.obj.writeT imeStamp ⇐ I.writeT imeStampobj.realT imeStamp ⇐ I.realT imeStampobj.isV alid ⇐ falseobj.isCommitted ⇐ false
else if received message is a commit invalidation, CI then//update log, timing state and per object state:store CI in update logupdate stream.V V and currentV V to include CI.commitT imeStamp.update currRealV V to include CI.realT imeStamp.//if target timestamp matches current timestamp:// update commit flag:if obj.writeT imeStamp equals CI.targetT imeStamp then
obj.isCommitted ⇐ trueend if
else if received message is a delete invalidation, DI then//update log, timing state and per object state:store DI in update logupdate stream.V V and currentV V to include DI.deleteT imeStamp.update currRealV V to include DI.realT imeStamp.obj.deleteT imeStamp ⇐ DI.deleteT imeStamp
else if received message is an imprecise invalidation, IM then//update log, timing state and interest set state:store IM in update logupdate stream.V V and currentV V to include IM.endV V .update currRealV V to include IM.realEndV V .check for intersecting setIIS ⇐ stream.SS ∩ IM.targetSetif IIS 6= ∅ then
// detach IIS from the streamIIS.noGapV V ⇐ min(IIS.noGapV V, IM.startV V − 1)stream.SS ⇐ stream.SS\IISremove stream from IIS.attachedStreams
end ifend if
Figure 6.3: Pseudocode for processing received invalidations.
86

if received message is a checkpoint, CP then//apply received meta-data to local structuresfor all IS in CP do
update local IS.noGapV V to include CP.IS.noGapV Vend forfor all object metadata in CP do
if CP.obj.metadata is newer than local.obj.metada thenupdate local.obj.metadata to include CP.obj.metadata
end ifend for
else if received message is a catchup start message, CStart then//switch to catchup modestream.pendingSS ⇐ Cstart.SSstream.pendingV V ⇐ Cstart.V Vfor all invalidation or gap markers received do
process as above, except, update pendingV V instead of stream.V Vend for
else if received messages is a catchup end message, CEnd then//switch to normal modeif stream.pendingV V equals or includes stream.V V then
//attach stream.pendingSS to the stream.stream.SS ⇐ stream.SS ∪ stream.pendingSSadd stream to consistencyModule.pendingSS.attachedStreams
end ifend if
Figure 6.4: Pseudocode for processing other received messages on invalidation streams.
87

true. If the body is older than the timestamp, then the body is discarded. If
the body is newer than the timestamp, it implies that its corresponding inval-
idation has not been received yet. Instead of discarding it, the body is stored
in a body buffer and is applied to the store when its corresponding invalidation
arrives.
6.5 Conflict Detection
Conflict detection is an important feature for distributed storage sys-
tems. An object may be independently updated on multiple nodes leading to
diverging versions. Updates to the same byte of the same object are consid-
ered to be conflicting if there is no causal relationship between them. Such
conflicts need to be detected so that appropriate resolution, either automatic
or manual, can be invoked to resolve the differences and achieve eventual con-
sistency [49] [86].
Existing synchronization protocols [16, 33, 45, 59] often store or trans-
mit extra information for the sole purpose of conflict detection. For mobile
environments where network bandwidth and storage capacity can be limited,
it is important that such information be minimal. Fortunately, the mecha-
nisms layer in PADS can detect conflicts without having to store or transmit
any extra information – it simply derives the information it needs from the
state already maintained for consistency.
Conflict detection is carried out as described below. If no conflict is
detected, the received update is applied; otherwise the conflict flag set and
88

all the information is stored in a special file for resolution. PADS provides
mechanisms for conflict detection, but it leaves conflict resolution to system
specific policies. For convenience, PADS provides a default last-writer-wins
policy.
Dependency summary vectors. PADS uses a dependency summary vec-
tor (DSV) scheme for conflict detection. A dependency summary vector (DSV)
is a vector associated with an update that summarizes all the causally preced-
ing updates to the object being updated.
In particular, a DSV of a update U ,
• includes the timestamp of all causally preceding updates to the object.
• may include the timestamp of the current update, U .
• may include the timestamps of updates to other objects.
• excludes any updates that are causally ordered after U .
Note that, there is not necessarily a unique DSV for a single up-
date. For example, suppose all the causally ordered updates on an object
are (1@A), (3@A), (10@B). Two legal DSVs for the the second update (3@A)
are < 1@A, 9@B > and < 2@A, 6@B > but not < 0@A, 9@B > or <
3@A, 10@B > because the former does not include the first update and the
latter does not exclude the third update.
89

Conflict detection simply requires comparing the write times and the
DSVs for two updates. In order to detect whether two different updates U1 and
U2 to the same object conflict, we carry out the following comparisons: If U1.ts
is included in U2.dsv, then U1 causally precedes U2, by definition. Similarly, if
U2.ts is included in U2.dsv, then U2 causally precedes U1. Otherwise, U1 and
U2 are marked as conflicts.
Deriving DSVs. It would be inefficient to transmit a DSV with each update
and store a DSV with each object. PADS therefore derives DSVs from the
meta-data already maintained by the synchronization protocol. In order to do
that, it ensures that a node is aware of all the previous updates to the object
before it is updated. Any new update (a local write or a received invalidation)
can only be applied if there is no gap in the object update information (i.e.
the enclosing interest set is precise).
By definition noGapVV of an interest set covers all the causally preced-
ing updates to the objects in the interest up to that time. Hence, for an object
in the interest set, noGapV V includes all the causally preceding updates to
that object. If the interest set is precise, then the noGapV V and the DSV are
equal to currentV V .
To determine the DSVs of received invalidations, PADS takes advan-
tage of the causal property of the stream: For a received invalidation, all the
causally preceding updates have been already received, and any newer updates
will not arrive before the current received invalidation. streamV V includes all
90

the current and all causally preceding updates. The DSV for invalidations in
connected phase is streamV V . For invalidations received during log synchro-
nization, the DSV is pendingV V , and for updates received via a checkpoint,
the DSV is the received noGapV V .
Detecting conflicts. PADS detects conflicts by comparing the timestamp
and the DSV of the received invalidation with the locally stored object times-
tamp and the noGapV V of the enclosing interest set. Conflicting updates are
flagged and logged for the application or the user to handle.
6.6 Summary
The PADS mechanisms layer provides a set of common primitives so
that designers can simply invoke these mechanisms to construct systems with-
out having to spend the effort to reimplement them. In particular, the mech-
anisms layer implements (1) an object store and an update log for storing and
accessing data objects locally, (2) subscriptions for flexible and efficient update
propagation between nodes, (3) bookkeeping of consistency state that can be
used to implement various consistency semantics, and (4) a conflict detection
scheme so that concurrent updates can be eventually detected and resolved
without additional overhead.
91

Chapter 7
Bridging the Gap
The mechanisms layer implements the set of primitives required by
PADS policy layer. Unfortunately, the mechanisms API does not match the
policy API. This section describes how that gap is bridged. In particular, it
briefly describes the API exposed by the mechanisms layer, provides reasons
for why development on the raw API is difficult, and presents the modules
implemented to transform the raw API to routing and blocking policy API.
7.1 Mechanisms API
The mechanisms layer implements sufficient primitives that a distributed
storage system can be directly built over it. It provides an extensive set of
API that consists of a set of 10 actions (listed in Table 7.1) that can be used
to invoke mechanisms primitives, 37 triggers (listed in Table 7.2) that provide
information about events or messages received by the mechanisms layer, and
6 flags at the read/write interface (listed in Table 7.3) to specify the consis-
tency semantics. In order to build a distributed storage system over the raw
interface, a system designer specifies the system design by setting flags for
consistency at there read and write interface and defining a Controller that
92

Type List of Actions
Subscription Related
subscribeInvalsubscribeBodysubscribeCheckpointremoveSubscribeInvalremoveSubscribeBodyremoveConnection
Other Commands
issueDemandReadrequestSyncgetCurrentVVunbind
Table 7.1: Actions available to policy
implements methods to handle the received triggers.
Unfortunately, it is difficult to build a storage system with the interface
exposed for five reasons:
First, the API exposes too many abstractions. The API exposes at
least 6 types of streams that send different types of information. For example,
bodies are sent on a body stream whereas information about node state is
sent over a sync-reply stream. Also, the API differentiates between streams
and subscriptions—a subscription is instantiated over a stream which may be
serving multiple subscriptions. On the contrary, the PADS routing API only
exposes the single abstraction of a subscription keeping things simple.
Second, the difference between the triggers received is subtle and re-
quires an understanding of the implementation of the underlying layer. Con-
sider the two triggers informInvalStreamInitiated and informSubscribeInval-
Succeeded. The first one indicates that an invalidation stream was initiated
93

Type List of Triggers
Stream Initialization
informInvalStreamInitiatedinformCommitStreamInitiatedinformBodyStreamInitiatedinformUnbindStreamInitiatedinformSyncRplyStreamInitiatedinformCheckpointStreamInitiatedinformOutgoingInvalStreamInitiatedinformOutgoingBodyStreamInitiatedinformOutgoingCheckpointStreamInitiated
Stream Termination
informInvalStreamTerminatedinformCommitStreamTerminatedinformBodyStreamTerminatedinformUnbindStreamTerminatedinformSyncRplyStreamTerminatedinformCheckpointStreamTerminatedinformOutgoingInvalStreamTerminatedinformOutgoingBodyStreamTerminatedinformOutgoingCheckpointStreamTerminated
Message Received
recvSyncReplyinformReceiveInvalinformReceivePushBodyinformReceiveDemandReplyinformCheckpointStreamReceiveStatus
Local Events
informLocalWriteinformLocalDeleteinformLocalReadImpreciseinformLocalReadInvalid
Demand Read RelatedinformDemandReadMissinformDemandReadHitinformDemandImprecise
Consistency Related informBecameImpreciseinformBecamePrecise
Invalidation Subscription Related
informGapExistForSubscribeInvinformSubscribeInvalFailedinformSubscribeInvalSucceededinformOutgoingSubscribeInvalInitiatedinformOutgoingSubscribeInvalTerminated
Body Subscription Related
informSubscribeBodySucceededinformSubscribeBodyRemovedinformOutgoingSubscribeBodyInitiatedinformOutgoingSubscribeBodyTerminated
Table 7.2: Triggers sent from the underlying layer to the controller.
94

Operation Available FlagsRead blockInvalid, blockImprecise, maxTemporalErrorWrite priority, bound, targetOrderError
Table 7.3: Flags available for specifying consistency
between two nodes and the second one indicates that an invalidation subscrip-
tion was successfully established on a stream. If a designer is not careful, it is
is easy to confuse the two triggers. Another pair of triggers that can be eas-
ily mixed up is the informReceivePushBody and informReceiveDemandReply
triggers. Both indicate that a single body was received. However, the first
one implies that the sender of the body initiated the transfer and the sec-
ond one implies that the body was sent in response to a request. The PADS
API combines the two triggers to a single sendBodySuccess trigger reducing
opportunities for misuse.
Third, the level of detail exposed by some triggers is often not required
in practice. For example, the triggers informDemandReadMiss and informDe-
mandReadImprecise indicate that a request for a body from another node could
not be satisfied because the local copy was either invalid (for the first trigger)
or imprecise (for the second trigger). In all the systems we constructed with
PADS, we did not need this level of detail—it was sufficient to know that
a remote body request could not be locally satisfied but the reason was not
necessary.
Fourth, despite its size, the API is missing some important triggers
and consistency flags. Eventhough write operations expose a flag to set the
95

TACT order error constraint, there is no trigger that informs policy when the
constraint is not satisfied. Also, the default range of consistency semantics
supported is limited because the API only supports two of the three TACT
parameters ( it does not support the numerical error constraint).
Fifth, and most importantly, the API puts a lot of burden on the devel-
opers. Because the API does not impose a structure on system specification
(i.e. no separation of policy into routing and blocking), programmers are left
to decipher the different parts of system design (i.e. consistency, durability,
and information propagation) and the pick the right methods in the large API
to implement their systems. The API also does not make it easy to write
a customized consistency implementation—a designer would need to explicit
implement a wrapper that blocks read/write operations, sends a new trig-
ger to the controller, receives messages from the controller, and unblocks the
operation when appropriate.
7.2 Making it Easier to Use
For ease of development, we convert the raw API to PADS policy API.
In particular,
• we expose a much smaller API to developers. We trim excessive methods
and add methods to make the API more complete.
• we introduce a separation of concerns by splitting policy specification
into blocking and routing, making systems easier to design and imple-
96

!"#$%&'
()*+,-./0/'
"1('&-2)34,*)'
"156)3789'":-;0)'
%3,-/<,2)='"8:;-9'!8<.*>'
"),='
?3.2)'
@:A/*3.B;8-/'Triggers Actions
Blocking Triggers/
Action
C!(' C!('
C"C' C"C'
Figure 7.1: Bridging the mechanisms and policy layers.BPM stands for BlockingPolicyModule and BRB stands for BlockingRoutingBridge.
ment.
• we implement common tasks such as retries on subscription establish-
ment failure and communication between routing and blocking policies
so that designers need not reimplement them.
In order to support the PADS API, we implement four modules, as
illustrated by Figure 7.1: (1) the Routing/Mechanisms (R/M) interface that
translates the API exposed by the mechanisms layer to routing policy API,
(2) the R/OverLog runtime that translates R/OverLog policies into Java and
executes them over the mechanisms, (3) the BlockingPolicyModule (BPM)
that acts as a wrapper layer to intercept reads, writes, and update applications
to support blocking points and expose the pre-defined blocking conditions,
and (4) the BlockingRoutingBridge (BRM) that allows routing policies and
blocking policies to communicate with each other. We provide details of each
97

module in subsequent subsections.
7.2.1 R/M Interface
!"#$%&'(")*+,'-(.'
/0+12%*34'-(.'
R/M
Interface
Policy
Mechanisms
Action Queue
Trigger Queue
Figure 7.2: Internal queues in the R/M Interface
The R/M interface is the middle layer between the policy and mecha-
nisms layers and serves three purposes: to translate the mechanisms API to the
concise PADS routing API, to prevent policies from implementing deadlocks,
and to implement common tasks.
Translating the API. As described earlier, the API exposed by the mech-
anisms layer is difficult to program on. The R/M interface translates the API
so that developers have a small, intuitive API to work with. It derives the
new API as follows:
• by reducing the abstractions exposed. Only a single abstraction for up-
date flows is exposed—subscriptions. Designers only take care of body
98

and invalidation subscriptions. They do not need to worry about streams
or multiple subscriptions on a single stream.
• by hiding triggers or actions that are excessive, redundant, or do not
fit in the PADS model. For example, we hide triggers pertaining to
streams because we do not expose streams to designers. We also hide
the actions and triggers that get information about another node’s state
(i.e. requestSync action and recvSyncReply triggers), because in PADS,
this functionality is part of meta-data propagation and should be imple-
mented by the routing rules rather than the underlying layer. Triggers
that are related to consistency of local objects (i.e. informBecamePrecise
and informBecameImprecise) are hidden from the routing policy layer,
because PADS uses this information for blocking policy. Also, since the
PADS model cleanly separates data propagation and meta-data propaga-
tion paths, the primitives for binding bodies together with invalidations
for propagation are hidden (i.e. no bound writes and no unbind action).
• by combining similar triggers and in some cases, making them more
general. For example, we combine the read miss triggers (informLocal-
ReadImprecise and informLocalReadInvalid) to a single operationBlock
trigger which not only informs the routing policy of read misses but also
of write blocks. We combine the informReceivePushBody and informRe-
ceiveDemandReply triggers into a single sendBodySuccess trigger.
99

Even though the API exposed to the routing policy is much smaller
than that provided by the mechanisms layer, we find that the routing API
provides sufficient control to policy writers to specify system designs.
Preventing deadlocks. The R/M interface adds a level of indirection in
the threading model to prevent deadlocks. Without the interface, a thread
that is carrying out some important task in the mechanisms layer could get
transferred to the policy layer via a trigger and then come back down to
the mechanisms layer via an action without having finished the task it was
originally performing. This situation can cause blocking or deadlocks. The
R/M interface prevents deadlocks by cleanly separating policy threads from
mechanisms threads. Whenever a mechanisms thread needs to send a trigger
to policy, it puts a trigger object in an R/M interface queue and returns
to its processing. A separate R/M thread retrieves the trigger in the queue
and calls into the policy layer. This separation allows mechanisms threads to
asynchronously send triggers to the policy. Policy actions are also passed to
the mechanisms in a similar fashion. Figure 7.2 depicts the internal queues of
the R/M interface.
Implementing common tasks. The R/M interface implements function-
ality for common tasks. For example, if there was a problem establishing a
subscription, the R/M interface will automatically retry the subscription for
2 times after every 3 seconds before reporting failure. The number of retries
and the time between each retry can be specified by the policy writer.
100

7.2.2 R/OverLog Runtime
!"#$%&$'(
)*"+,(
-"+"#.,%#(
)*"+,(/0"0"(
1.+&2"#3(4.5(
)6"'07%+(
)+8$+"(
9%::0+$'.7%+(
4%&02"(
4.#3;.22"#3(
<0=3'#$="(
4%&02"(
<0=3'#$="#3(
>.,.(4%&02"(
?.=2"3(
Figure 7.3: Major components of the R/OverLog Runtime.The solid arrows represent event or table update flows and the dashed arrows
represent handler or table lookups.
The R/OverLog runtime is a Java-based engine to run translated R/OverLog
policies. As Figure 7.3 depicts, major parts of the runtime include:
• Event Queue: keeps events that have been generated or received but not
yet been handled.
• Periodic Event Generator: generates periodic events.
• Handler Map: keeps track of the handlers associated with every event.
A handler contains the logic of a rule that is fired by the event.
101

• Communication Module: responsible for sending and receiving remote
events. The communication module also maintains a list of marshallers
for serializing and deserializing events. When an remote event is received,
it is put into the event queue.
• Data Module: responsible for storing the R/OverLog state as tables.
Every table has interfaces for inserting tuples, removing tuples, and car-
rying out simple aggregation.
• Subscribe Module: allows an external source to listen for a particular
event type by registering a subscriber for it. Whenever an event of the
registered type is generated, the associated subscriber is invoked.
R/OverLog to Java Translation. The translation from R/OverLog to
Java is done using the XTC toolkit [34, 41]—a framework for building exten-
sible source-to-source translators and compilers. The translation is carried as
follows:
• For every event or tuple, the translator generates a tuple class that con-
tains fields and marshalling code.
• For every rule, the translator generates a handler class that implements
the logic of the rule (i.e. table lookups, assignments, and constraints) to
generate either another event or a table update.
• For a single R/OverLog program, the translator generates a main OLG
class that initializes the tables, registers periodic events with the Periodic
102

Event Generator, registers print subscribers for watch statements, and
for every event, registers the appropriate handlers and marshallers with
the Handler Map and Communication Module respectively.
The execution of the program can be started by invoking the start
method in the generated main OLG class.
Program execution. The main execution thread dequeues an event from
the event queue, looks up the handler table and executes all the handlers asso-
ciated with that event. Any new events generated as a result of the execution
are put back in the event queue. The event queue checks if the events are
local or remote. Local events are put to the back of the queue whereas remote
events are handed over the communication module for transfer. Any table
updates are handed over to the data module.
Fixed point semantics. The semantics guarantees that all rules triggered
by the appearance of the same event are executed atomically in isolation from
one another. Once all such rules are executed, their table updates are applied,
their actions are invoked, and the events they produce are enqueued for future
execution.
In order to support fixed point semantics, the event queue is imple-
mented internally as two queues: an external queue that holds events belonging
to different fixed points and an internal queue that holds event corresponding
103

to the current fixed point. Events received from remote nodes and periodic
events are put in the external queue.
The execution thread will pick an event from the internal queue, un-
less it is empty, and invoke the handlers associated with the event. All new
local events generated from the handling of that event are put in the inter-
nal queue. Table updates and remote events are buffered. When the internal
queue becomes empty (i.e. the end of the fixed-point is reached), table updates
are committed and the remote events are sent. The next time the execution
thread needs an event, it is picked from the external queue starting a new fixed
point.
7.2.3 BlockingPolicyModule (BPM)
!"#$%&'()(*
!"#$%
&'()"% *+,-.'(/012%
324#5-%
+,-#.'&/*0-,'#1*!-23,"*
Figure 7.4: Blocking Policy Module intercepting operations.
The blocking policy API consists of 5 blocking points that correspond
to access points and a list of conditions that can be specified for each ac-
cess point. On the other hand, the mechanisms API only provides blocking
flags for reads (equivalent to the readNowBlock) and an order error bound for
writes (equivalent to the writeBeforeBlock). The gap between the two layers is
104

Flags at Blocking PointsisValid
isCompleteisSequenced
MaxStaleness
Table 7.4: Flags provided by the BlockingPolicyModule.
public class MyCausalBPM extends BlockingPolicyModule {readNowBlock.isValid = true;readNowBlock.isComplete = true;ApplyUpdateBlock.isValid = true;
}
Figure 7.5: Blocking policy implementation for causal consistency.
bridged by the BlockingPolicyModule—a wrapper layer, as depicted in Figure
7.4, that intercepts reads and writes before and after access to local state and
received invalidations before they are applied locally. Each interception point
corresponds to a blocking point.
The built-in blocking conditions are provided as flags (refer to Table
7.4). By default, the flags are set to false so no operation is blocked. Most
flags are set to either true or false values. For the maxStaleness condition, the
designer provides a list of nodes, a count and a value for the maximum staleness
allowed. For example, as illustrated by Figure 7.5, the blocking policy for a
causal consistency can be implemented by setting flags such that only valid
and complete objects are read and application of invalidations is delayed until
the corresponding body has arrived.
If an operation blocks due to built-in conditions, the BlockingPolicy-
105

Module will inform the routing policy of the block via operationBlocked triggers
for each condition that is not satisfied. When all the conditions are satisfied,
the operation will automatically unblock.
For custom conditions, the BlockingPolicyModule provides abstract
methods for each point that a designer can extend and methods to look up
consistency state for each object.
7.2.4 BlockingRoutingBridge (BRB)
Some systems implement custom blocking conditions based on routing
conditions (i.e. the B ACT condition) which requires the blocking policy to
send and receive messages from routing policy, the BlockingPolicyModule pro-
vides a BlockingRoutingBridge. that allows a blocking policy to send a trigger
to the routing policy and receive events from it. Triggers are inserted in the
routing runtime’s event queue. In order to receive an event, the blocking policy
first needs to register the eventName for the routing event it wants to listen
to. When an eventName is registered, the bridge sets up a producer-consumer
mailbox for the received events that match that eventName. Whenever an
event that matches a registered eventName is generated in the routing run-
time, it is put in the mailbox. To receive a routing event, the blocking policy
calls the waitFor method with the eventName and a eventSpec. The call will
cause the policy to wait until a matching event is received from the routing
policy, unless it is already available in the mailbox.
For example, for the simple client-server system described in Section 9.3.1,
106

1: public class SCSPolicy extends BlockingPolicyModule {2:3: //built-in conditions4: readNowBlock.isValid = true;5: readNowBlock.isComplete = true;6: readNowBlock.isSequenced = true;7: applyUpdateBlock.isValid = true;8:9: // initialization10: public SCSPolicy() {11: // register the events to listen to12: bridge.registerMsgToListen("writeComplete");13: }14:15: // custom write after block16: public void writeAfterBlock(ObjId objId, long offset,17: long length, AcceptStamp as) {18:19: // inform routing policy of a block20: Object[] msgFeilds = {objId.toString, offset, length,21: "writeAfter", "custom"};22: bridge.sendMsgToRouting("operationBlocked", msgFeilds);2324:25: // create the required event spec26: Object[] spec = {objId.toString()};27:28: // wait for a writeComplete message for the object29: bridge.waitFor("writeComplete", spec);30: }31: }32:
Figure 7.6: Blocking policy implementation for the simple client-server system (refer toSection 9.3.1)
107

the blocking policy specifies the B ACT writeComplete condition for the write-
AfterBlock. As Figure 7.6 illustrates, the implementation of this condition
involves four steps: First, the blocking policy registers the event it wants to
listen to (line 12). Second, the designer extends the appropriate method of
the BlockingPolicyModule (line 16). Third, in the method implementation,
the routing policy is informed that the operation is blocked (line 22). Finally,
the method waits until the required routing event is received (line 29).
In fact, the bridge allows designers to specify custom event matchers,
that determines how received events are matched with the provided event spec.
Custom matchers are useful to implement optimizations. For example, on a
client, each multiple outstanding write may be waiting for an acknowledgement
from the server to ensure that the server has received that particular write.
However, because invalidation streams are causal, when a server acknowledges
a particular write, it is safe to assume that the server has already received
all the previous writes from the client. When the server sends an ack for
the last-received write, the default matcher will only unblock that particular
write. By customizing the event matcher, all previous outstanding writes can
be unblocked too.
7.3 Summary
There is a need to bridge the gap between the API expected by the
policy layers and that provided by the mechanisms layer. This section provides
details of the glue. In particular, it describes (1) the R/M Interface that allows
108

deadlock-free translation between the mechanisms and the routing API, (2)
the R/OverLog runtime that translates R/OverLog to Java and executes it, (3)
the BlockingPolicyModule that intercepts access to local state at the blocking
points and exposes blocking conditions as flags for each point, and (4) the
BlockingRoutingBridge that handles communication between the routing and
blocking policies for routing-based conditions.
109

Chapter 8
Evaluation Part 1: Microbenchmarks
Other than the ease of development, PADS’s usefulness also depends
on the performance of systems built with it. The systems should not have to
pay a high cost for PADS’s generality. This chapter examines the overheads
associated with PADS. Evaluation of systems built with PADS is discussed in
Chapter 9. To aid our evaluation, we consider three criteria
• Synchronization overhead: The overheads associated with storage and
synchronization should be within a reasonable constant factor of ideal
implementations and the cost for generality should be minimal.
• Flexibility: The synchronization options should allow designers to pick
the appropriate tradeoffs for their target workloads.
• Performance: The absolute performance of the research prototype should
be reasonable enough for prototyping and for supporting moderately
workloads.
In order to determine whether PADS meets the above stated criteria,
we carry out our evaluation in three steps. First, we evaluate the theoretical
network and storage overheads associated with PADS primitives. Second, we
110

quantify the overheads and evaluate the flexibility by running microbench-
marks on our prototype. Lastly, we examine the absolute read/write perfor-
mance and R/OverLog communication performance.
8.1 Fundamental Overheads
We evaluate the fundamental network and storage costs associated with
PADS prototype by examining the costs for synchronization via subscriptions,
for data and update log storage, and for conflict detection.
Ideal PADS PrototypeSubscription Setup
Inval Subscription O(NSSPrevUpdates) O(Nnodes
with LOG catch-up +NSSPrevUpdates)Inval Subscription O(NSSObj) O(NSSObj)with CP from time=0Inval Subscription O(NSSObjUpd) O(Nnodes
with CP from time=VV +NSSObjUpd)Body Subscription O(NSSObjUpd) O(NSSObjUpd)
Transmitting UpdatesInval Subscription O(NSSNewUpdates) O(NSSNewUpdates)Body Subscription O(NSSNewUpdates) O(NSSNewUpdates)
Table 8.1: Network overheads associated with subscription primitives.Here, Nnodes is the number of nodes. NSSObj is the number of objects in the subscription set.NSSPrevUpdates and NSSObjUpd are the number of updates that occurred and the numberobjects in the subscription set that were modified from a subscription start time to thecurrent logical time. NSSNewUpdates is the number of updates to the subscription set thatoccur after the subscription has caught up to the sender’s logical time.
Synchronization costs. Table 8.1 shows the network cost associated with
our prototype’s implementation of PADS’s primitives and indicates that our
111

costs are close to the ideal of having actual costs be proportional to the amount
of new information transferred between nodes. Note that these ideal costs may
not be able always be achievable in practice.
During invalidation subscription setup, the sender transmits a version
vector indicating the start time of the subscription and catch-up information
as either a log of past updates or a checkpoint of the current state. The start
time is simply a partial version vector that is proportional to the number of
nodes in the system. That cost is amortized over all the updates sent on the
connection.
For log catchup, in an ideal implementation, the sender would send in-
formation proportional to the number of updates that have occurred to objects
in the subscription set. In PADS, the sender does the same—it sends precise
invalidations for those updates. However, in order to support flexible consis-
tency, invalidation subscriptions also carry extra information such as imprecise
invalidations. Imprecise invalidations summarize updates to objects not part
of the subscription set and are sent to mark logical gaps in the casual stream
of invalidations. The number of imprecise invalidations sent depends on the
workload and is never more than the number of invalidations of updates to ob-
jects in the subscription set sent. The size of imprecise invalidations depends
on the locality of the workload and how compactly the invalidations compress
into imprecise invalidations.
For checkpoint catchup, the sender sends meta-data for all the objects
that were updated after the start time. Hence the cost is proportional to the
112

number of objects that were modified plus the initial start time. Also, by
starting the subscription at logical time 0, the overhead for the start time can
be avoided. Note, checkpoint catch-up is particularly cheap when interest sets
are small.
Once the invalidation subscription is set up, the sender simply sends
precise invalidations of any new updates occur to objects in the subscription
set. The precise invalidations are interspersed with imprecise invalidations.
But, as mentioned before, the number of imprecise invalidations is no more
than the number of precise invalidations.
PADS body subscriptions send the same information as an ideal imple-
mentation. The sender sends the bodies of objects in the subscription set that
were modified after the start time. Once the receiver has caught up, it sends
bodies of any new updates it receives.
Two things should be noted. First, the costs of the primitives are
proportional to the useful information sent, so they capture the idea that a
designer should be able to send just the right data to just the right places.
Second, there are only two ways that PADS sends extra information over
the ideal: the start-time vector during invalidation subscription set up and
the imprecise invalidations sent on a stream to maintain flexible consistency.
Overall, we expect PADS to scale well to systems with large numbers of objects
or nodes—the per-node overheads associated with the version vectors used to
set up subscriptions is amortized over all of the updates sent on the stream,
and subscription sets and imprecise invalidations ensure that the number of
113

records transferred is proportional to amount of data of interest (and not to
the overall size of the database).
Storage costs. The minimal storage requirement is that a node stores the
objects it is interested in.
However, it is impossible for a system to provide any reasonable consis-
tency semantics if no bookkeeping information is maintained (even monotonic-
reads coherence requires some bookkeeping for accept stamps). Therefore,
in addition to data objects in the store, PADS maintains per-object meta-
information, consistency bookkeeping per-interest set, and an update log. For
every object, PADS maintains a logical time stamp, a real time stamp, a
deleted flag, a valid flag and a commit flag. PADS also stores a version vector
for every interest set in ISStatus. The number of interest sets is generally
fixed. However, in the worst case, a version vector is maintained per object.
The update log has a fixed maximum size and hence imposes a constant storage
overhead.
Conflict detection. For conflict detection, PADS utilizes the consistency
information already maintained and therefore exerts no extra overhead. How-
ever, for several other conflict-detection schemes, the amount of bookkeeping
information increases with network disruptions. For PADS, the bookkeep-
ing information remains the same because the number of interest sets a node
maintains is not affected by disruptions. Hence, for k interest sets, the storage
114

VersionPVE
Vector PADSvectors sets
log sync cp syncStorage O(N ×R) O(N + R) O(N + R) O(N + k ×R) O(N + k ×R)lower boundStorage O(N ×R) unbounded O(N ×R) O(N + k ×R) O(N + k ×R)upper boundNetwork O(p×R) O(p + R) O(p + R) O(p + R) O(p + R)lower boundNetwork O(p×R) unbounded O(N ×R) O(p×R) O(N ×R)upper bound
Table 8.2: Storage and network overheads under network disruptions.R nodes and N objects stored on a node in k interest sets with p recent updates
overhead is O(N + k × R). If invalidations subscriptions are disrupted, they
simply re-start where they left off incurring extra version vector overhead due
to the resending of subscription start time. Hence, in the worst case, for log
synchronization, there is a version vector overhead per update sent and for
checkpoint synchronization, there is a version vector overhead per object sent.
Given the amount of flexibility that PADS supports, conflict detection
costs are reasonable, see Table 8.2. In fact, the overheads of conflict detection
is comparable to existing state-of-the-art approaches that do not provide such
flexibility. We only compare the catchup phase because it is not clear whether
the schemes have an equivalent “connected” phase. PADS performs as well as
vector sets while providing stronger consistency guarantees.
115

0
200
400
600
800
1000
1200
1400
Fine RandomFine SeqCoarse RandomCoarse Seq
Tot
al B
andw
idth
(K
B)
Body
ConsistencyOverhead
Invalidations
SubscriptionSetup
Ideal
Figure 8.1: Network bandwidth cost to synchronize 1000 10KB files, 100 of which aremodified.
8.2 Quantifying the Constants
We investigate whether the actual performance of the prototype matches
the cost model by running experiments to quantify the overheads associated
with subscription setup, with flexible consistency support, and with the dif-
ferent options exposed by the primitives.
Synchronization cost under different workloads. Figure 8.1 illustrates
the synchronization cost for a simple scenario. In this experiment, there are
10,000 objects in the system organized into 10 groups of 1,000 objects each,
and each object’s size is 10KB. The reader registers to receive updates for one
of these groups by establishing subscriptions. Then, the writer updates 100 of
the objects in each group. Finally, the reader reads all the objects.
We look at four scenarios representing combinations of coarse-grained
116

vs. fine-grained synchronization and of writes with locality vs. random writes.
For coarse-grained synchronization, the reader creates a single invalidation
subscription and a single body subscription spanning all 1000 objects in the
group of interest and receives 100 updated objects. For fine-grained synchro-
nization, the reader creates 1000 invalidation subscriptions, one for each object,
and fetches each of the 100 updated bodies. For writes with locality, the writer
updates 100 objects in the ith group before updating any in the i+1st group.
For random writes, the writer intermixes writes to different groups in random
order.
Four things should be noted. First, the synchronization overheads are
small compared to the body data transferred. Second, the “extra” overheads
associated with PADS subscription setup and flexible consistency over the
best case is a small fraction of the total overhead in all cases. Third, when
writes have locality, the overhead of flexible consistency drops further because
larger numbers of invalidations are combined into an imprecise invalidation.
Fourth, coarse-grained synchronization has lower overhead than fine-grained
synchronization because it avoids per-object subscription setup costs.
Advantage of partial replication. Figure 8.2 demonstrates the bandwidth
savings achieved due to PADS’s support for partial replication. Node A up-
dates 500 objects of size 3KB and Node B establishes subscriptions to syn-
chronize these updates. Two scenarios are investigated: in one, subscriptions
are established with the subscription set covering 100% of the data, and in the
117

0
200
400
600
800
1000
1200
1400
1600
0 100 200 300 400 500
Dat
a T
rans
fere
d (K
B)
Number of Writes
SS=100%
Ideal
SS=10%
Figure 8.2: Bandwidth to synchronize 500 objects of size 3KB
Coherence-only PADSBursty workload (1 in 10) 1 1.1Worst Case (1 in 2) 1 2
Table 8.3: Messages per interested update sent by a coherence-only system and PADS.
other, the subscriptions only cover 10% of the data. The bandwidth required
by the subscriptions for synchronization is measured. The results depicted in
Figure 8.2 allow us to come to two conclusions. First, the results demonstrate
that the overhead for synchronization is relatively small even for small files
compared to an ideal implementation (plotted by counting the bytes of data
that must be sent ignoring all metadata overheads). More importantly, they
demonstrate that if a node requires only a fraction (e.g., 10%) of the data,
PADS keeps information that is not relevant to that subset to a minimum and
in the process greatly reduces the bandwidth required for synchronization.
118

Cost of flexible consistency. We evaluate the cost PADS pays to support
flexible consistency. For systems that require weak consistency such as coher-
ence, they simply send updates without imprecise invalidations. For systems
that require strong consistency, they need to send imprecise invalidations to
ensure casual semantics over which stronger guarantees can be implemented.
In particular, we quantify the cost of sending imprecise invalidations in an
invalidation stream. Table 8.3 compares the number of messages per update
between a coherence-only system and PADS. In a coherence-only system, only
updates to objects in the synchronization set are sent on the stream. On the
other hand, PADS also sends imprecise invalidations for updates outside the
subscription set.
The number of imprecise invalidations sent depends on the workload.
For a bursty workload, say if 9 out of 10 updates occur to objects in the sub-
scription set, an imprecise invalidation is only sent after nine invalidations.
In the worst case workload, PADS sends an imprecise invalidation after every
precise invalidation. Thus, PADS sends at most twice the number of messages
when compared to a coherence-only system. However, since imprecise invalida-
tions are significantly smaller than actual bodies, the overhead remains within
reasonable bounds.
Advantage of multiplexing subscriptions. Efficient support for multiple
dynamic subscriptions is important because they are used to implement de-
mand caching with per-object callbacks [49]. For example, each time a client
119

0
200000
400000
600000
800000
1e+06
1.2e+06
1.4e+06
1.6e+06
1.8e+06
2e+06
0 200 400 600 800 1000 1200 1400
Syn
c B
W (
Byt
es)
Files
Withmultiplexing
No multiplexing
Ideal
Figure 8.3: Bandwidth to subscribe to varying number of single-object interest sets withand without subscription multiplexing.
caches a new object, it creates a new subscription for that object.
We compare the efficiency of establishing multiple dynamic subscrip-
tions with and without subscription multiplexing. Figure 8.3 depicts the
bandwidth costs for establishing single-object invalidation subscriptions for
the ideal case, without subscription multiplexing, and with subscription mul-
tiplexing (i.e. PADS). In the ideal case, only the object is sent for every sub-
scription request. Without subscription multiplexing, a separate invalidation
stream is established for each request. Other than subscription start and end
messages, imprecise invalidations are sent on each stream. PADS multiplexes
subscription requests on a single stream—only the catchup start, the object,
and catchup end messages are sent for each request. The major cost savings
comes from the reduction of redundant invalidation information received by
120

a node. Since the prototype is implemented in Java, the inefficiency of Java
serialization does affect the bandwidth cost. However, it is not difficult to see
that the bandwidth subscription multiplexing achieves comes much closer to
ideal when compared to no multiplexing.
0
50000
100000
150000
200000
250000
300000
350000
400000
450000
0 500 1000 1500 2000
Sub
scrip
tion
BW
(B
ytes
)
Number of updates to 500 objects
Log catchup
CP catchup
Figure 8.4: Bandwidth to subscribe to varying number of updates to 500 objects sets forcheckpoint and log synchronization.
Log vs. checkpoint catchup. Figure 8.4 compares the bandwidth cost
for log and checkpoint synchronization. A set of 500 objects were updated
uniformly and invalidation subscriptions are established separately for each
object. As the figure illustrates, the synchronization cost for both options are
proportional to the number of updates when each object is not updated more
than once. Checkpoint synchronization does worse because the size of the
meta-data sent in a checkpoint is slightly larger than an imprecise invalidation
sent for log synchronization. However, when an object is updated multiple
times, checkpoint catchup outperforms log synchronization.
121

Write Write Read Read(sync) (async) (cold) (warm)
ext3 6.64 0.02 0.04 0.02PADS Object Store 8.47 1.27 0.25 0.16
Table 8.4: Read/write performance for 1KB objects/files in milliseconds.
Write Write Read Read(sync) (async) (cold) (warm)
ext3 19.08 0.13 0.20 0.19PADS Object Store 52.43 43.08 0.90 0.35
Table 8.5: Read/write performance for 100KB objects/files in milliseconds.
8.3 Absolute Performance
This section examines the absolute performance of the PADS proto-
type. Our goal is to provide sufficient performance for the system to be useful,
but we expect to pay some overheads relative to a local file system for three
reasons. First, PADS is a relatively untuned prototype rather than well-tuned
production code. Second, our implementation emphasizes portability and sim-
plicity, so PADS is written in Java and stores data using BerkeleyDB rather
than running on bare metal. Third, PADS provides additional functionality
such as tracking consistency metadata not required by a local file system.
Local performance. Tables 8.4 and 8.5 summarize the performance for
reading and writing 1KB and 100KB objects stored locally in PADS and com-
pare it to the performance for reading or writing a file on the local ext3 file
system. In each run, we read/write 100 randomly selected objects/files from a
122

collection of 10,000 objects/files. We measure the performance of synchronous
writes (i.e. the write returns after update is committed to disk), asynchronous
writes (i.e. the write returns after the update is committed to memory), cold
reads (i.e. the data need to be fetched from disk), and warm reads (i.e. the
data is already located in memory). The values reported are averages of 5
runs.
Overheads are significant. Upon further investigation, we find the bot-
tleneck in the mechanism layer object store and consistency bookkeeping im-
plementation. When an update occurs, the disk may be accessed 4 times:
to store the invalidation in the log, to store the body in the object store, to
update the object meta-data, and to update the byte-range meta-data. Also,
by allowing writes to occur to any object byte-range, a decent amount of com-
plexity is introduced—to clean per-range meta-data and the bodies stored in
the database when a new write overlaps multiple existing writes. We have
strong evidence to believe that by optimizing object and meta-data storage,
by restricting writes to fixed-size chunks, and by implementing a customized
disk sync policy, performance can be greatly improved. In the meantime,
the current prototype still provides sufficient performance for a wide range of
systems.
R/OverLog performance. Execution of routing rules has significant im-
pact on the performance of systems built on PADS. An earlier version of our
system used P2 [56] to execute the routing rules. Unfortunately, the P2 run-
123

P2 Runtime R/OverLog RuntimeLocal Ping Latency 3.8ms 0.322msLocal Ping Throughput 232 request/s 9,390 requests/sRemote Ping Latency 4.8ms 1.616msRemote Ping Throughput 32 requests/s 2,079 requests/s
Table 8.6: Performance numbers for processing NULL trigger to produce NULL event.
time was not designed to receive external events. With a workaround, it was
possible to insert and receive events from P2, but with inferior performance.
As described in Chapter 7, we currently use a customized translator that con-
verts R/OverLog programs to Java and a R/OverLog runtime that natively
implements an interface to allow PADS to inject and receive events from the
rules. In addtion, R/OverLog imposes a local-lookups-only limitation, i.e. a
rule can only be look up local tables in its body. In OverLog, a single rule
can look up tables on multiple nodes. The P2 runtime establishes and main-
tains tuple streams between nodes in order to support that. However, by
imposing the local-lookups-only limitation, commuincation between nodes in
R/OverLog is reduced to explicit event transfers making the runtime smaller
and more streamlined. As a result, we were able to achieve a significant per-
formance boost. Table 8.6 quantifies the performance difference between the
P2 and R/OverLog runtimes.
8.4 Summary
In this chapter, we evaluate the overheads associated with the generality
of PADS. We find that the benefits of using PADS as a development platform
124

compelling. Architecturally, PADS is sound— its network and storage over-
heads are within small constant factors of ideal implementations. Also, PADS
provides sufficient flexibility to allow designers to pick the tradeoffs best suited
for their target workloads. Finally, in terms of absolute performance, since the
PADS prototype is a user-level Java implementation, the performance is suf-
ficient for prototyping and moderately demanding workloads. However, this
drawback can be seen as an artifact of the prototype implementation rather
than that of the approach.
125

Chapter 9
Evaluation 2: Case-studies
This chapter evaluates PADS’s approach for building new distributed
systems. The goal of the evaluation is to demonstrate that the primitives are
sufficient to implement a broad range of systems, that the policy architecture
is easy to use, and that the systems developed with it are real and can be
easily adapted to new requirements. One way to evaluate PADS would be to
construct a new system for a new demanding environment and report on that
experience. We choose a different approach—constructing a broad range of
existing systems—for three reasons. First, a single system may not cover all
of the design choices or test the limits of PADS. Second, it might not be clear
how to generalize the experience from building one system to building others.
Third, it might be difficult to disentangle the challenges of designing a new
system for a new environment from the challenges of realizing a given design
using PADS.
This chapter provides details of our experience. First, it defines the
evaluation criteria for a good framework from a developer’s point of view.
Then, it defines notion of architectural equivalence that is used as a yardstick
to compare our implementation of a system with its original description. It
126

then details the implementation of each case-study system. Finally, it describes
the experiments carried out to evaluate the performance, realism, or the agility
of the systems developed.
9.1 Evaluation Overview
The goal of PADS is to make it easier to develop new systems. Our
evaluation aims to answer the following questions from a system developer’s
point of view:
• Is PADS flexible enough to support my system? We build a wide range of
systems inspired from literature, including client-server systems, server-
replication systems, and ad-hoc peer-to-peer systems. These systems
were chosen because they embody a wide range of replication techniques
that are often used by new systems. PADS’s ability to support this wide
range of systems suggests that PADS is sufficiently powerful to define
systems spanning a major portion of the design space.
• Is development easier on PADS? The fact that a small team could quickly
build a dozen significant replication systems is evidence of our experi-
ence that PADS greatly reduces development time and effort. Developers
only need to focus on implementing and debugging control plane policy
instead of implementing data plane mechanisms such as object storage,
consistency management, and communication. In addition, each system
built on PADS requires relatively few lines of code – typically several
127

dozens of routing rules and a handful of blocking conditions. In our
experience, it is easier to understand and debug a system that has a
hundred lines rather than thousands of lines of code. There is, how-
ever, an initial learning curve to learn the routing language, to learn the
API, and to change the development mindset to the blocking and routing
approach. We note, however, that students in a graduate operating sys-
tem class have used PADS as a development platform for their projects
without much trouble after the initial learning curve.
• Does PADS facilitate evolving system design to incorporate new features
or meet new demands? We added significant new features to several
systems we built that allowed order-of-magnitude performance improve-
ments over the baseline design. The features were added by changing
fewer than 10 routing rules.
• Can PADS be used to build real systems? When building a concrete
distributed storage system, a system designer often needs to deal with
practical issues such as setting up configuration options, handling crashes
and recovery, maintaining consistency and durability during periods of
crashes, and dynamic addition and removal of nodes. PADS makes it
easy to implement the above details: First, the stored events primi-
tive allows routing policies to dynamically store and retrieve configura-
tion options from data objects. Second, during recovery, the underlying
mechanisms take care of complex details such as state recovery so that
128

policy writers only need to re-establish subscriptions. Third, blocking
predicates make it easy to reason about consistency during crashes be-
cause they prevent any “unsafe” data from being accessed. All systems
we built are concrete in the sense that they handle the above issues.
To demonstrate the “concreteness” of the systems, we examine the be-
haviour of some of the systems under adverse network conditions (refer
to Section 9.4).
• What are the overheads? We evaluate the overheads associated with the
generality of PADS. As described in Chapter 8, architecturally PADS
seems sound—its network and storage overheads are within small con-
stant factors of hand-tuned systems. In terms of absolute performance,
since the PADS prototype is a user-level Java implementation, a system
built on PADS is within ten to fifty percent of the original system in
most cases and 3.3 times worse in the worst case we measured.
9.2 Architectural Equivalence
We build systems based on system designs from the literature, but
constructing perfect, “bug-compatible” duplicates of the original systems using
PADS is not a realistic (or useful) goal. On the other hand, if we were free
to pick and choose arbitrary subsets of features to exclude, then the bar for
evaluating PADS is too low: we can claim to have built any system by simply
excluding any features PADS has difficulty supporting.
129

Section 3 identifies three aspects of system design—security, interface,
and conflict resolution—for which PADS provides limited support, and our
implementations of the above systems do not attempt to mimic the original
designs in these dimensions.
Beyond that, we have attempted to faithfully implement the designs
in the papers cited. More precisely, although our implementations certainly
differ in some details, we believe we have built systems that are architecturally
equivalent to the original designs. We define architectural equivalence in terms
of three properties:
E1. Equivalent overhead. A system’s network bandwidth between any pair
of nodes and its local storage at any node are within a small constant
factor of the target system.
E2. Equivalent consistency. The system provides consistency and staleness
properties that are at least as strong as the target system’s.
E3. Equivalent local data. The set of data that may be accessed from the sys-
tem’s local state without network communication is a superset of the set
of data that may be accessed from the target system’s local state. Notice
that this property addresses several factors including latency, availability,
and durability.
There is a principled reason for believing that these properties capture some-
thing about the essence of a replication system: they highlight how a system
130

resolves the fundamental CAP (Consistency vs. Availability vs. Partition-
resilience) [30] and PC (Performance vs. Consistency) [55] tradeoffs that any
distributed storage system must make. More specifically, omitting any of these
properties could allow a system to significantly cut corners. For example, one
can improve read performance by increasing network and storage resource con-
sumption to speculatively replicate more data to each node. Similarly, one can
improve the availability a system offers for a given level of consistency by using
more network bandwidth to synchronize more often [94], or one can reduce the
resources consumed by reducing the amount of data cached at a node.
9.3 Case-studies
In this section, we evaluate PADS’s flexibility and ease of use as a
development platform by constructing 8 distributed storage systems inspired
from literature. The constructed systems include
• client-server systems such as Simple Client-Server(SCS), Full Client Server(FCS),
Coda [49], and TRIP [64],
• server replication systems such as Bayou [69], and Chain Replication [88],
and
• object-replication systems such as TierStore [26] and Pangaea [77].
These systems were chosen because they cover a wide range of design
features in a number of key dimensions. For example,
131

• Replication: full replication (Bayou, Chain Replication, and TRIP),
partial replication (Coda, Pangaea, FCS, and TierStore), and demand
caching (Coda, Pangaea, and FCS),
• Topology: structured topologies such as client-server (Coda, FCS, and
TRIP), hierarchical (TierStore), and chain (Chain Replication); unstruc-
tured topologies (Bayou and Pangaea). Invalidation-based (Coda and
FCS) and update-based (Bayou, TierStore, and TRIP) propagation.
• Consistency: monotonic-reads coherence (Pangaea and TierStore), ca-
sual (Bayou), sequential (FCS and TRIP), and linearizability (Chain
Replication); techniques such as callbacks (Coda, FCS, and TRIP) and
leases (Coda and FCS).
• Availability: Disconnected operation (Bayou, Coda, TierStore, and TRIP),
crash recovery (all), and network reconnection (all).
Table 1.1 on Page 5 summarizes the features for each system and the following
subsections provide details of the implementations. In order to differentiate
the PADS implementations from the original implementations, we add a prefix
“P-” to the PADS implementations.
9.3.1 Simple Client Server (SCS)
This simple system includes support for a client-server architecture,
invalidation callbacks [42], sequential consistency [53], correctness in the face
132

of crash/recovery of any node, and configuration. For simplicity, it assumes
that a write overwrites an entire file.
We choose this example not because it is inherently interesting but be-
cause it is simple yet sufficient to illustrate the main aspects of PADS, including
support for coarse- and fine-grained synchronization, consistency, durability,
and configuration. In Section 9.3.2, we extend the example with features
that are relevant for practical deployments, including leases [32], cooperative
caching [23], and support for partial-file writes.
9.3.1.1 System Overview
The server stores the full set of data. Clients cache a subset of data
locally. On a read miss, a client fetches the missing object from the server
and registers for callback for the fetched object. On a write, a client sends the
update to the server and waits for an acknowledgement from the server. Upon
receiving an update of an object, a server sends invalidations to all clients
registered to receive callbacks for that object. Upon receiving an invalidation
of an object, a client sends an acknowledgment to the server and cancels the
callback. Once the server has received all the acknowledgements for an update
from other clients, the server informs the original writer so it can continue.
For durability reasons, a write by a client is not seen by any other client until
the server has persistently stored the update.
Since multiple clients can issue concurrent writes to multiple objects, for
sequential consistency, the system defines a global sequential order on those
133

writes and ensures that they are observed in that order. In a client-server
system, it is natural to have the server set that total order. Therefore, upon
receiving acknowledgements for all of an update’s invalidations, the server
assigns the update a position in the global total order. The system guarantees
sequential consistency by ensuring that a write of an object is blocked until
all earlier versions have been invalidated, a read of an object is blocked until
the reader holds a valid, consistent copy of the object, and a read or write of
an object is blocked until the client is guaranteed to observe the effects of all
earlier updates in the sequence of updates defined by the server.
9.3.1.2 P-SCS Implementation
The implementation of P-SCS requires 24 routing rules and 5 blocking
conditions. In this section, we provide a brief overview of the implementation.
Details of the implementation is described Appendix A.1. We include rule
counts in our descriptions to emphasize how concisely the design features can
be specified.
System configuration. Every client needs to know the address of the server
to contact. At startup, a node looks up a configuration file using the stored
events interface and stores the identifier in an R/OverLog table (2 rules: ini1,
ini2).
Sending updates to server. As soon as a client receives the server address,
it establishes invalidation and body subscriptions to the server so that local
134

updates (2 rules: csSb1, csSb2) can be automatically transferred to the server.
In order to deal with failures, the client tries to reestablish the subscriptions
when they fail (2 rules: csSb3, csSb4).
Read misses and callbacks. Whenever a client suffers a read miss, the
routing policy is informed by a operationBlock trigger for the readNowBlock.
When that happens, the client informs the server and stores outstanding misses
in a local table (2 rules: rm1, rm2). When the server is informed of a client
read miss, it sends the body to the client and establishes a callback. In PADS,
a callback is simply an invalidation subscription from the server to the client.
The server also puts an entry into a table to keep track of the clients have that
callbacks for objects (3 rules: cb1, cb2, cb3).
Client writes and ack management. Whenever a client updates an ob-
ject, the invalidation and the body propagates to server via the subscriptions
established at startup. An invalidation of the update automatically propagates
to other clients that hold callbacks via the established invalidation subscrip-
tions. When a client receives an invalidation, it will check if the received
invalidation corresponds to an outstanding read miss (1 rule:rinv0). If not,
it breaks the callback (by removing the invalidation subscription) and sends
an ack to the server (2 rules: rinv1, rinv2). Otherwise, the client will con-
sider the miss satisfied, and delete the entry from its read miss table. (1 rule:
rinv3). The server gathers acks from the clients. Once all the required acks
135

have been received, the server assigns a sequence number to the write and
informs the original writer. The server-side ack management takes 8 rules in
total: ack1-ack8.
Enforcing durability and consistency. The blocking policy helps enforce
durability and consistency guarantees by specifying 5 conditions.
In order to ensure durability, the isValid condition is specified for the
applyUpdateBlock at the server and at clients. Since a received invalidation is
not applied until the corresponding body is received, it is guaranteed that no
update can be seen by any other client until the server has stored it.
Consistency is guaranteed both by routing rules and access blocks. A
routing rule (ack7), ensures that an update is assigned a sequence number only
after all other copies of the data have been invalidated. On the client side, the
readNowBlock is set to 3 conditions:isValid and isComplete and isSequenced.
These conditions ensure that reads only return valid consistent copies that
have been sequenced by the server. The writeAfterBlock on the client is set
to B action writeComplete. In other words, the write only unblocks after it
receives a message from the server, which, due to the ack management routing
rules, is only sent to the writer when all other copies have been invalidated.
Even when multiple clients are updating the same object, the observed order
at any client is as the same sequenced order observed at server.
136

9.3.2 Full Client Server (FCS)
The full client server adds several features to the simple client server
implementation to make it more practical including volume leases [93], coop-
erative caching [23], partial-file writes, and blind writes. Complete details of
the implementation can be found in Appendix A.2.
To ensure liveness for all clients that can communicate with the server,
we use volume leases to expire callbacks from unreachable clients. Adding
volume leases requires an additional blocking condition (i.e. MaxStaleness) to
block client reads if the client’s view of the server’s state is too stale. The
routing implementation keeps the client’s view up-to-date by sending periodic
heartbeats via a volume lease object. It requires 3 routing rules to have clients
maintain subscriptions to the volume lease object and have the server put
heartbeats into that object, and 4 more to check for expired leases and to
allow a write to proceed once all leases expire. Note that by transporting
heartbeats via a PADS object, we ensure that a client observes a heartbeat
only after it has observed all causally preceding events, which greatly simplifies
reasoning about consistency.
We add cooperative caching by replacing the rule that sends a body
from the server with 5 rules: 3 rules (cc2, cc3, cc4) to find a helper and get
data from the helper, and 2 rules to fall back on the server if no helper is found
(cc5) or when the helper fails to satisfy the request (cc1). Note that reason-
ing about cache consistency remains easy because invalidation metadata still
follows client-server paths, and the blocking predicates ensure that a body is
137

not read until the corresponding invalidation has been processed. In contrast,
some previous implementations of cooperative caching found it challenging to
reason about consistency [18].
We add support for partial-file writes by removing one and adding six
rules (pfw1-pfw6) to track which blocks each client is caching and to cancel a
callback subscription for a file only when all blocks have been invalidated.
Finally, we add three rules (bw1-bw3) to the server that check for blind
writes when no callback is held and to establish callbacks for them.
In total, P-FCS requires 43 routing rules and 6 blocking conditions.
9.3.3 Coda
We implement P-Coda, a system inspired by the version of Coda de-
scribed by Kistler et. al. [49]. P-Coda supports disconnected operation, reinte-
gration, crash recovery, whole-file caching, open/close consistency (when con-
nected), causal consistency (when disconnected), and hoarding. We know of
one feature from this version that we are missing: we do not support cache
replacement prioritization. In Coda, some files and directories can be given a
lower priority and will be discarded from cache before others. Coda is long-
running project with many papers worth of ideas. We omit features discussed
in other papers like server replication [78], trickle reintegration [60], and vari-
able granularity cache coherence [61]. We see no fundamental barriers to
adding them in P-Coda. We also illustrate the ease with which co-operative
caching can be added to P-Coda.
138

9.3.3.1 System Overview
P-Coda is a client-server system, similar to the simple client server
system (SCS) discussed earlier. The main differences between P-Coda and
P-SCS are detailed below.
First, P-Coda provides open-to-close semantics which means that when
a file is opened at a client, the client will return a local valid copy or retrieve
the newest version from the server. Subsequent updates to the file are buffered
and are sent to the server on file is closed.
Second, every client has a list of files, the “hoard set”, that it will
prefetch from the server and store in its local cache whenever it connects to
the server.
Third, P-Coda supports disconnected operation by weakening sequen-
tial consistency to causal consistency when a client is disconnected from the
server: allowing writes to continue uncommitted and reads to access uncom-
mitted but valid objects.
9.3.3.2 P-Coda Implementation
As detailed in Appendix A.3, we extend the routing rules of the simple-
client server model to implement P-Coda in 31 rules. First, like the full client-
server example, we add 3 rules to check for blind writes when no callback is
held and establish callbacks for them. Second, we add 4 rules (ss1-ss4) to
keep track of server status and two rules (li1 and li2) to let writes and reads
139

continue when disconnected from the server. Third, we implement hoarding in
2 rules (hd1-hd2) by storing the hoard set as tuples in a configuration file and
establishing invalidation and body subscriptions for each of them whenever
the client connects to the server. Fourth, in order to allow a client to quickly
get information about the updates it has missed, we add a rule (csSb6) so that
when a client reconnects to a server, it establishes an invalidation subscription
for an empty set. This action causes the server to send an imprecise invalidation
for the missed updates.
The blocking policy adds the B ACT isDisconnected condition to read-
NowBlock and writeAfterBlock so as to allow reads and writes to continue when
operating in disconnected mode.
In order to support open-to-close semantics, we implement a wrapper
layer over the underlying read/write interface. When a file is opened, a read
for the whole object is issued at the read interface. All writes are buffered by
the wrapper layer and are issued to the underlying write interface when the file
is closed. The blocking policy ensures that the close returns after all updates
are propagated to the server and all copies cached on other clients have been
invalidated.
P-Coda and cooperative caching. In P-Coda, on a read miss, a client is
restricted to retrieving data from the server. We add cooperative caching to
P-Coda by adding 8 rules: 5 to monitor the reachability of nearby nodes, 1
to retrieve data from nearby peers on a read miss, and 2 to get invalidations
140

from nearby clients if the server is not reachable. Cooperative caching has two
advantages: first, it can greatly reduce the read latency on a miss if the peer
is much closer than the server, and second it allows disconnected clients to
access files they previously could not.
9.3.4 TRIP
TRIP [64] is a distributed storage system for large-scale information
dissemination: all updates occur at a server and all reads occur at clients.
TRIP uses a self-tuning prefetch algorithm to send higher priority updates
sooner and delays applying invalidations to a client’s locally cached data to
maximize the amount of data that a client can serve from its local state.
TRIP guarantees sequential consistency via a simple algorithm that exploits
the constraint that all writes are carried out by a single server.
9.3.4.1 P-TRIP Implementation
Information propagation in P-TRIP follows a star topology—every client
is connected to the server via invalidation and body subscriptions.
To support self-tuning, whenever the server issues a write, it assigns a
priority to the update. Since body subscriptions have no ordering constraints,
they send bodies of higher priority updates before lower-priority updates. Also,
the application of invalidations is delayed up to a threshold by setting the
applyUpdateBlock is to (isValid or maxStaleness). Since all writes occur at the
server, sequential consistency can be guaranteed by setting the readNowBlock
141

to (isValid and isComplete). As detailed in Appendix A.4, the routing policy
consists of 6 rules in total and the blocking policy of 4 conditions.
P-TRIP and hierarchical topology. TRIP assumes a single server and
a star topology. We can improve scalability by changing the topology from
a star to a static tree by simply changing a node’s configuration file to list a
different node as its parent. PADS’s mechanisms are general enough so that
this “just works”—invalidations and bodies flow as intended and consistency is
still maintained. Better still, if one writes a topology policy that dynamically
reconfigures a tree when nodes become available or unavailable [56], a few
additional rules to establish or remove subscriptions to produce a dynamic-
tree version of TRIP that still enforces sequential consistency. Note that we
have implemented the static tree policy (refer to Appendix A.4) but not the
dynamic tree policy.
9.3.5 Bayou
Bayou [69] is a server-replication protocol that focuses on peer-to-peer
data sharing. Every node has a local copy of all of the system’s data. From
time to time, a node picks a peer to exchange updates with via anti-entropy
sessions. Actually, Bayou transfers updates as operations. However, since
PADS does not support operation transfer, we implement a state-transfer ver-
sion of Bayou. Bayou guarantees causal and eventual consistency.
142

9.3.5.1 P-Bayou Implementation
As detailed in Appendix A.5, an anti-entropy session in PADS is imple-
mented by setting up invalidation and body subscriptions between two nodes.
Once all the updates have been transferred, the subscriptions are removed.
Note that if the log at the sender has been truncated to a point beyond the re-
ceiver’s consistency state, the invalidation subscription will automatically send
a checkpoint rather than the log; Bayou’s approach is similar. The complete
implementation of P-Bayou’s routing policy requires 10 rules: 1 for picking a
random peer, 4 for carrying out anti-entropy and 5 for connection manage-
ment.
Causal consistency is guaranteed by setting the readNowBlock to (is-
Valid and isComplete). Also, the applyUpdateBlock is set to isValid to ensure
that no local data is invalid.
P-Bayou and small device support. Since the protocol propagates up-
dates for the whole data set to every node, P-Bayou cannot efficiently support
smaller devices that have limited storage or bandwidth.
It is easy to change P-Bayou to support small devices. In the original
P-Bayou design, when anti-entropy is triggered, a node connects to a reachable
peer and subscribes to receive invalidations and bodies for all objects using a
subscription set “/*”. In our small device variation, a node uses stored events
to read a list of directories from a per-node configuration file and subscribes
143

only for the listed sub-directories. This change required us to modify two
routing rules.
This change raises an issue for the designer. If a small device C syn-
chronizes with a first complete server S1, it will not receive updates to objects
outside of its subscription sets. These omissions will not affect C since C
will not access those objects. However, if C later synchronizes with a second
complete server S2, S2 may end up with causal gaps in its update logs due
to the missing updates that C doesn’t subscribe to. The designer has three
choices: to weaken consistency from causal to per-object coherence; to restrict
communication to avoid such situations (e.g., prevent C from synchronizing
with S2); or to weaken availability by forcing S2 to fill its gaps by talking
to another server before allowing local reads of potentially stale objects. We
choose the first, so we change the blocking predicate for reads to no longer
require the isComplete condition. Other designers may make different choices
depending on their environment and goals.
9.3.6 Chain Replication
Chain Replication [88] is a server replication protocol in which the
nodes are arranged as a chain to provide high availability and linearizability.
All updates are introduced at the head of the chain and queries are handled
by the tail. An update does not complete until all live nodes in the chain have
received it. Chain management is carried out by an always-available master.
P-Chain-Replication implements this protocol with support for vol-
144

umes, the addition of new nodes to the chain, and node failure and recovery.
9.3.6.1 P-Chain-Replication Implementation
P-ChainReplication implements each link in the chain as an invalidation
and a body subscription. When an update occurs at the head, the update
flows down the chain via subscriptions (Rules sub1 and sub2). The master
process is also implemented in R/OverLog and is assumed to never fail. We
see no difficulty in extending the master to a Paxos-based [54] implementation.
Appendix A.6 details the routing and blocking policies of P-Chain-Replication.
Volume support. P-Chain-Replication assumes that the prefix of every ob-
jectId indicates its volume. For example, the object /V1/a/b belongs to vol-
ume V1. In order to aid the specification of the routing policy, we extend
R/OverLog runtime to implement a function f getVol() that will return the
volume for a given object. We also assume that there is a volume list that
specifies the volumes that should be replicated on each node.
Enforcing linearizability. In order to support linearizability, an update
occurs only at the head and is blocked until it has propagated down all nodes
to the tail of the chain. Once the tail receives an update, it sends an ack
upstream. In the original chain replication system, every node keeps track
of the updates it has sent downstream for which it has not received an ack.
However, in P-ChainReplication, it is not necessary to carry out this complex
145

bookkeeping. Because updates propagate along the links in causal order, there
is no need to send an ack through each link. Instead, the tail simply sends an
ack to the head. The ack indicates that all nodes in the chain have received
that update and all casually preceding updates. Rules con1 to con6 provide
details of ack management.
The blocking policy is defined so that reads return only causal data
(i.e. readNowBlock is set to isValid and isComplete), and a write is blocked
until an ack is received (i.e. writeAfterBlock is set to B Action(AckFromTail)).
Also, the applyUpdateBlock is set to isValid to ensure that every node has the
body of an update before its invalidation is applied.
Chain management. As in the original system, chain management is car-
ried out by the master. The master keeps track of the reachability of all
nodes and maintains a table that stores the configuration of the volume chain.
When the master detects a new node or a node failure, it rearranges the chain
as described below.
Addition of new nodes. When the master detects a new node, it is added
to the tail of the chain as follows: The master sends messages to the new
node informing it of the current head and tail of the volume chain and its
predecessor. The node then establishes subscriptions to its predecessor. Once,
the subscription has caught-up (i.e. the node’s state reflects that of the chain),
it can start functioning as a tail and notifies all other nodes. Rules nn1 to
146

nn15 handle new node addition.
Failure recovery. When a node fails, the master detects the failure and
rearranges the chain. If the head fails, the next node in the chain becomes the
the head. If the tail fails, the node before it in the chain becomes the new tail.
If a node in the middle fails, then its predecessor and successor are linked by
establishing subscriptions. Note that if a node recovers, it is added to the end
of the chain, just like a new node.
In the original system, recovery from mid-chain failure involves a com-
plex algorithm to ensure that the node preceding the failure sends all updates
that the new successor is missing and that the successor sends all the missing
acks to the predecessor. However, in the PADS implementation, all this com-
plexity is eliminated. The preceding node only needs to establish subscriptions
and the underlying mechanisms will automatically send the missing updates
down the chain. Also, since the tail sends an ack directly to the head, hop-
by-hop ack management is not needed. Rules dn1 to dn7 provide details of
failure management.
9.3.7 TierStore
TierStore [26] is a distributed object storage system that targets devel-
oping regions where networks are bandwidth-constrained and unreliable. Each
node reads and writes specific subsets of data. Since nodes must often oper-
ate in disconnected mode, the system prioritizes 100% availability over strong
147

consistency.
9.3.7.1 System Overview
In order to achieve these goals, TierStore employs a hierarchical pub-
lish/subscribe system: all nodes are arranged in a tree. To propagate updates
up the tree, every node sends all of its updates and its children’s updates to
its parent. To flood data down the tree, data are partitioned into “publica-
tions” and every node subscribes to a set of publications from its parent node
covering its own interests and those of its children. For consistency, TierStore
only supports single-object monotonic reads coherence.
9.3.7.2 P-TierStore Implementation
A 14-rule routing policy establishes and maintains the publication ag-
gregation and multicast trees. A full listing of these rules is available in the
Appendix A.7. In terms of PADS primitives, each connection in the tree is
simply an invalidation subscription and a body subscription between a pair of
nodes. Every PADS node stores in configuration objects the ID of its parent
and the set of publications to subscribe to.
On start up, a node uses the stored events interface to read configura-
tion objects and store the configuration information in R/OverLog tables (4
rules: in0, pp0, pp1, pSb0). When it knows of the ID of its parent, it adds
subscriptions for every item in the publication set (2 rules: pSb1, pSb2). For
every child, it adds subscriptions for “/*” to receive all updates from the child
148

(2 rules: cSb1, cSb2). If an application decides to subscribe to another publi-
cation, it simply writes to the configuration object. When this update occurs,
a new stored event is generated and the routing rules add subscriptions for the
new publication.
Recovery. If an incoming or an outgoing subscription fails, the node pe-
riodically tries to re-establish the connection (2 rules: f1, f2). Crash recov-
ery requires no extra policy rules. When a node crashes and starts up, it
simply re-establishes the subscriptions using its local logical time as the sub-
scription’s start time. The underlying subscription mechanisms automatically
detect which updates the receiver is missing and send them.
Delay tolerant network (DTN) support. P-TierStore supports DTN
environments by allowing one or more mobile PADS nodes to relay information
between a parent and a child in a distribution tree. In this configuration,
whenever a relay node arrives, a node subscribes to receive any new updates
the relay node brings and pushes all new local updates for the parent or child
subscription to the relay node (4 rules: dtn1, dtn2, dtn3, dtn4). An alternative
approach would be to make use of existing DTN network protocols. This
approach is straight-forward to implement if the DTN layer informs the policy
layer when it has an opportunity to send to another node and when that
opportunity ends. An opportunity could be that a TCP connection opens up
or a USB drive was inserted. The routing policy would establish subscriptions
to send updates within that connection opportunity as a DTN bundle.
149

Blocking policy. Blocking policy is simple because TierStore has weak con-
sistency requirements. Since TierStore prefers stale available data to unavail-
able data, we set the applyUpdateBlock to isValid to avoid applying an invali-
dation until the corresponding body is received.
TierStore vs. P-TierStore. Publications in TierStore are defined by a
container name and depth to include all objects up to that depth from the
root of the publication. However, since P-TierStore uses a name hierarchy to
define publications (e.g., /publication1/*), all objects under the directory tree
become part of the subscription with no limit on depth.
Also, PADS provides a single conflict-resolution mechanism, which dif-
fers from that of TierStore in some details. Similarly, TierStore provides native
support for directory objects, while PADS supports a simple untyped object
store interface.
9.3.8 Pangaea
Pangaea [77] is a peer-to-peer distributed storage system for wide area
networks that supports high degrees of replication and high availability. For
each object, Pangaea maintains a connected graph and updates to that object
are pushed along graph edges. Pangaea also maintains three gold replicas for
every object to ensure data durability. The location of gold replicas for each
object is stored in the object’s parent (i.e. the directory entry for the file).
For consistency, Pangaea guarantees only weak best-effort coherence.
150

9.3.8.1 P-Pangaea Implementation
P-Pangaea implements object creation, replica creation, update prop-
agation, 3 gold nodes and 3-connected graph maintenance, temporary failure
recovery, and permanent failure recovery. The graph edges in P-Pangaea are
simply invalidation and body subscriptions. We currently do not implement
harbingers. However, since harbingers map to invalidations, support for them
can be easily added by only using invalidation subscriptions as graph edges
and fetching the bodies from the fastest link as required. Also, we do not
implement the “red button” feature, which provides applications confirmation
of update delivery or a list of unavailable replicas, but do not see any difficulty
in integrating them. Appendix A.8 details the implementation of P-Pangaea.
Network management. The original system implements a gossip-based
membership module to keep of track of node liveness and latency between
nodes pairs. P-Pangaea uses a simple ping-based membership protocol and
assumes that the latency between node pairs is static and is provided in a
configuration file.
Gold node information. In P-Pangaea, instead of mapping a file/directory
to a single object, it is mapped to two: a .data object to store the data
and a .meta to store the gold node location of its children. For example,
the file “/a/b” actually maps to objects “/a/b/.data” and “/a/b/.meta” and
gold node locations of “/a/b” are stored in “/a/.meta”. In order to aid the
151

specification of routing rules, we extend the R/OverLog runtime with string
manipulation functions to extract the parent directory of a file from its ID
(f getParent()), to get the fileId from the meta or data objectId (f getObj()),
and vice versa (f getData(), f getMeta()). Also, a wrapper is implemented at
the local interface to translate all reads and writes to an object to its .data
object. Like the original system, in P-Pangaea, all read and write requests are
preceded by a directory lookup.
Whenever an object locally replicated, the routing rules use the stored
events interface to read and watch the associated .meta object to be informed
of any updates to gold node information.
Update propagation. Replicas of an object are arranged in a connected
graph with invalidation and body subscriptions as the edges. Whenever an
update occurs, the update automatically floods the graph via the subscriptions.
The blocking policy sets the applyUpdateBlock to isValid so that both the body
and invalidation of an update are stored locally before the update is propagated
to other nodes.
Replica addition. When a node, N, tries to access an object that is not
present locally (i.e. read miss), the system proceeds to create a replica locally.
It will look up the location of the gold node for that object from the parent
directory. If the parent directory is not locally available, it looks up its parent.
This can continue recursively up to the root directory.
152

In order to create a local replica, N contacts the gold node of the object
to retrieve the data and creates links to 3 replicas (1 gold and 2 others) so
that the local replica is integrated in the connected graph with at least one
direct link to a gold node.
File creation. In order to create a new object, a node will pick two other
nodes and establish connections to them for that object. It then declares the
two nodes and itself as gold gold nodes for that object and updates the parent
directory object with that information. Note that the update automatically
floods the parent object graph.
Failures. As in the original system, temporary failures are simply dealt with
by retrying. For permanent failures, if a non-gold replica fails, its peers es-
tablish connections to other replicas to ensure the connectivity of the graph.
If a gold node fails, a non-gold node is promoted to gold and connections are
established to maintain the gold node clique.
In total, the implementation of P-Pangaea requires 59 routing rules and
1 blocking predicate.
9.4 Properties of Constructed Systems
We explore the properties of constructed systems in terms of their real-
ism, agility, and performance. In particular, we run experiments to investigate
153

how the systems handle failures, the ease of adding new features for perfor-
mance benefits, and the absolute performance of constructed systems.
9.4.1 Realism
When building a distributed storage system, a system designer needs to
address issues that arise in practical deployments such as configuration options,
local crash recovery, distributed crash recovery, and maintaining consistency
and durability despite crashes and network failures. PADS makes it easy to
tackle these issues for three reasons. First, since the stored events primitive
allows routing policies to access local objects, policies can store and retrieve
configuration and routing options on-the-fly. For example, in P-TierStore, a
node stores in a configuration object the publications it wishes to access. In
P-Pangaea, the parent directory object of each object stores the list of nodes
from which to fetch the object on a read miss.
Second, for failure and crash recovery, the underlying subscription mech-
anisms insulate the designer from implementing low-level recovery logic. Upon
recovery, local mechanisms first reconstruct local state from persistent logs.
Also, PADS’s subscription primitives abstract away many challenging details
of resynchronizing node state. Notably, these mechanisms track consistency
state even across crashes that could introduce gaps in the sequences of in-
validations sent between nodes. As a result, crash recovery in most systems
simply entails restoring lost subscriptions and letting the underlying mecha-
nisms ensure that the local state reflects any updates that were missed.
154

Third, blocking predicates greatly simplify maintaining consistency dur-
ing failures. If there is a failure and the required consistency semantics cannot
be guaranteed, the system will simply block access to “unsafe” data. On re-
covery, once the subscriptions are restored and the predicates are satisfied, the
data become accessible again.
For example, in an anti-entropy session in P-Bayou, Node A receives up-
dates from Node B via invalidation and body subscriptions. Every time A ap-
plies a received update to its local state, its current logical time currentV V ad-
vances to include that update. Let’s say that the subscription disconnects be-
fore all the updates were transferred due to a network failure. Two things must
be noted: First, reads of local data at A still guarantee causal consistency—
since the applyUpdateBlock is set to isValid, invalidations are only applied
if the corresponding body is received, and since invalidations are applied in
causal order, all locally stored objects are valid and causally consistent. Sec-
ond, recovery is as simple as re-establishing subscriptions to receive updates
from another node. A’s currentV V indicates the latest update in causal order
it has received. By setting the subscription start time to currentV V , all the
updates that A missed will be transferred. The new subscription, in effect,
starts from where the previous on left off. Even if A crashes before the anti-
entropy session was complete, on recovery, A will recover its currentV V from
the persistent logs. By establishing subscriptions, it can retrieve the updates
it missed.
In P-Coda, even if a client looses the connection to the server, either due
155

to a network partition or due to server crash, it is not necessary to implement
special logic to maintain consistency during failures. The blocking conditions
will automatically prevent the read of locally invalid data by blocking the read
until the connection to the server is re-established and a valid version of the
object is retrieved.
In each of the PADS systems we constructed, we implemented support
for these practical concerns. Due to space limitations we focus this discussion
on the behaviour of two systems under failure: the full featured client-server
system (P-FCS) and TierStore (P-TierStore). Both are client-server systems,
but they have very different consistency guarantees. We demonstrate that the
systems are able to provide their corresponding consistency guarantees despite
failures.
Consistency, durability, and crash recovery in P-FCS and P-TierStore.
Our experiment uses one server and two clients. To highlight the interactions,
we add a 50ms delay on the network links between the clients and the server.
Client C1 repeatedly reads an object and then sleeps for 500ms, and Client C2
repeatedly writes increasing values to the object and sleeps for 2000ms. We
plot the start time, finish time, and value of each operation.
Figure 9.1 illustrates behavior of P-FCS under failures. P-FCS guar-
antees sequential consistency by maintaining per-object callbacks [42], main-
taining object leases [32], and blocking the completion of a write until the
server has stored the write and invalidated all other client caches. We config-
156

0
5
10
15
20
25
30
0 10 20 30 40 50 60 70 80
Val
ue o
f rea
d/w
rite
oper
atio
n
Seconds
ServerUnavailable
ReaderUnavailable
Reads continueuntil lease expires
Reads then blockuntil server recovers
Write blocked untilserver recovers
Write blocked untillease expires
ReaderWriter
Figure 9.1: Demonstration of full client-server system, P-FCS, under failures.The x-axis shows time and the y-axis shows the value of each read or write operation.
ure the system with a 10 second lease timeout. During the first 20 seconds
of the experiment, as the figure indicates, sequential consistency is enforced.
We kill (kill -9) the server process 20 seconds into the experiment and restart
it 10 seconds later. While the server is down, writes block immediately but
reads continue until the lease expires after which reads block as well. When
we restart the server, it recovers its local state and resumes processing re-
quests. Both reads and writes resume shortly after the server restarts, and
the subscription reestablishment and blocking policy ensure that consistency
is maintained.
We kill the reader, C1, at 50 seconds and restart it 15 seconds later.
Initially, writes block; but as soon as the lease expires, they proceed. When
the reader restarts, reads resume as well.
157

0
10
20
30
40
50
60
70
80
0 10 20 30 40 50 60 70 80
Val
ue o
f rea
d/w
rite
oper
atio
n
Seconds
ServerUnavailable
ReaderUnavailable
Reads satisfiedlocally
Writescontinue Writes
continue
ReaderWriter
Figure 9.2: Demonstration of TierStore under a workload similar to that in Figure 9.1.
Figure 9.2 illustrates a similar scenario using P-TierStore. P-TierStore
enforces monotonic reads coherence rather than sequential consistency, and
propagates updates via subscriptions when network is available. As a result,
all reads and writes complete locally without blocking during network failures.
During periods of no failures, the reader receives updates quickly and reads
return recent values. However, if the server is unavailable, writes still progress,
and the reads return values that are locally stored even if they are stale.
9.4.2 Agility
A system’s requirements also change, as workloads and goals change.
We explore how systems built with PADS can be adapted. We highlight two
cases in particular: our implementation of Bayou and Coda. Even though
they are simple examples, they demonstrate that being able to easily adapt a
158

0
100
200
300
400
500
P-Coda + Cooperative CachingP-Coda
Ave
rage
rea
d la
tenc
y (m
s)
Figure 9.3: Average read latency of P-Coda and P-Coda with cooperative caching.
system to send the right data along the right paths can pay big dividends.
P-Bayou and small device enhancement. P-Bayou was extended to sup-
port small devices by a simple change of two routing rules. The results are
consistent with that depicted in Figure 8.2. If a node requires only a fraction
(e.g., say 10%) of the data, the small-device enhancement allows a node to
synchronize only the required subset of data thereby reducing the bandwidth
required for anti-entropy.
P-Coda and cooperative caching. In P-Coda, support for cooperative
caching was implemented by adding only 8 rules. Figure 9.3 depicts the dif-
ference in read latencies for misses on a 1KB file with and without support
for cooperative caching. For the experiment, the round-trip latency between
the two clients is 10ms, whereas the round-trip latency between a client and
server is almost 500ms. When data can be retrieved from a nearby client, read
159

1KB objects 100KB objectsCoda P-Coda Coda P-Coda
Cold read 1.51 4.95 (3.28) 11.65 9.10 (0.78)Hot read 0.15 0.23 (1.53) 0.38 0.43 (1.13)Connected Write 36.07 47.21 (1.31) 49.64 54.75 (1.10)Disconnected Write 17.2 15.50 (0.88) 18.56 20.48 (1.10)
Table 9.1: Read and write latencies in milliseconds for Coda and P-Coda.The numbers in parentheses indicate factors of overhead. The values are averages of 5 runs.
performance is greatly improved. More importantly, with this new capability,
clients can share data even when disconnected from the server.
9.4.3 Absolute Performance
Our goal is to provide sufficient performance to be useful. We compare
the performance of a hand-crafted implementation of a system (Coda) that
has been in production use for over a decade and a PADS implementation of
the same system (P-Coda). We expect P-Coda to pay some overheads over
Coda because PADS is a relatively untuned prototype rather than well-tuned
production code.
Table 9.1 compares the client-side read and write latencies of Coda and
P-Coda. The systems are set up in a two client configuration. To measure the
read latencies, client C1 has a collection of 1,000 objects and Client C2 has
none. For cold reads, Client C2 randomly selects 100 objects to read. Each
read fetches the object from the server and establishes a callback for the object.
C2 re-reads those objects to measure the hot-read latency. To measure the
160

connected write latency, both C1 and C2 initially store the same collection of
1,000 objects. C2 selects 100 objects to write. The write will cause the server
to store the update and break a callback with C1 before the write completes
at C2. Disconnected writes are measured by disconnecting C2 from the server
and writing to 100 randomly selected objects.
The performance of PADS’s implementation is comparable to the orig-
inal system in most cases and is at most 3.3 times worse in the worst case we
measured.
9.5 Summary
This section evaluates the benefits of PADS as a development plat-
form for distributed storage systems. First, by constructing 8 very different
systems, this section proves that the primitives provided by PADS are suffi-
cient to implement a wide range of systems. Second, the systems were easy to
build—each required only a couple dozens of routing rules and a few blocking
conditions; each requiring only a couple of weeks of development time. Third,
despite the conciseness of the specification, each system was concrete in the
sense that it could handle handle real-world issues such as recovery from fail-
ures and configuration options. Fourth, the systems could be easily adapted to
new environments by changing just a handful of rules. Lastly, the performance
of constructed systems was reasonable—in the case of P-Coda, read/write per-
formance is within 50% of the original Coda system and three times worse in
the worst case we measured. This evaluation has led us to the conclusion
161

that PADS does indeed achieve the goal set out by this dissertation—to make
development of new distributed replication systems easier.
162

Chapter 10
Related Work
What sets PADS apart is the flexibility of its replication protocol, its
use of declarative specification, and its efficient conflict detection mechanisms.
In this chapter, we describe other replication protocols and the limits of their
flexibility, other applications for declarative domain specific languages, and
other approaches for conflict detection.
10.1 Replication Protocols
The ability of PADS to support a wide range of systems stems from
the bookkeeping information maintained at each node and the update transfer
protocol. Every node is associated with an interest set—the set of data the
node replicates locally and is interested in receiving updates about. In PADS,
instead of maintaining data and meta-data pertaining to its interest set only, a
node also maintains information about updates to objects not belonging to its
interest set. This information is summarized as logical gaps in its causal update
log. In addition, when a node transfers updates to another node, it transmits
summaries of updates to objects not in the receiver’s interest set as logical gap
markers. This extra information allows a node maintain consistency invariants
163

despite topology independence (TI) and partial replication (PR). With these
invariants, various consistency semantics (AC) can be implemented. Other
replication protocols do not send or maintain such information, and therefore,
cannot simultaneously provide all three PR-AC-TI properties.
Client-server and hierarchical systems. Client-server systems like Spri-
te [65] and Coda [49] and hierarchical systems like TierStore [26] and hierar-
chical AFS [42] are able support a range of consistency semantics (AC), from
monotonic read coherence to linearizability. They assume that there is a pri-
mary node (such as a central server) that maintains the full repository of data
and other nodes replicate subsets of the data (PR). However, these systems
allow updates to propagate via fixed paths only (i.e. along hierarchical connec-
tions). Even if some systems support co-operative caching, control messages
propagate via the fixed topology.
Even though the systems support partial replication, the systems re-
quire that a child node’s interest set is a subset of its parent’s. Because of the
restricted communication paths and replication options, every node is able
track the interest sets of its children and only transmits updates and meta-
data pertaining to their interest sets. On the contrary, when these systems
are implemented on PADS, extra information (i.e. logical gap markers) for
updates not pertaining to the interest set is also sent down the tree.
164

Server-replication systems. The main requirements for server-replication
systems is strong consistency (or at least causal) (AC) and high availability.
Some server-replication systems like Replicated Dictionary [90] and Bayou [69]
allow any node to send updates to any other node (TI), whereas others like
Chain Replication [88] define specific paths for update propagation. These
systems fundamentally assume full replication: all nodes store all data from
any volume they export and all nodes receive all updates. Because of full
replication, the required consistency semantics can be efficiently implemented.
For example, in Bayou, a log-based update propagation protocol, per-object
time stamps, and a single version vector are sufficient to order all received
updates to enforce causal consistency. If Bayou’s protocol is used in a scenario
with partial replication and ad-hoc communication patterns, the bookkeeping
information would not be sufficient, and the system would fail to meet its
consistency requirements. On the other hand, PADS sends and maintains extra
information that allows a node to order all updates and enforce its consistency
invariants.
Object replication systems. Object replication systems like Ficus [36],
Pangaea [77], and WinFS [67] allow nodes to store arbitrary subsets of data
(PR) and support arbitrary transmission patterns (TI). Unfortunately, the or-
der in which updates to different objects are sent from one node to another
is not guaranteed. Therefore, these systems support state-based rather than
log-based transfer and can only provide weak consistency guarantees such as
165

monotonic-read coherence. On the other hand, PADS transmits updates in
causal order with logical gap markers for missing updates. In addition, detect-
ing concurrent updates to a single object requires more per-object bookkeeping
to be maintained (refer to Section 10.3). PADS takes advantage of the up-
date transfer ordering to keep the information maintained for an object to a
minimum.
Some systems, such as Cimbiosys [70], distribute data among nodes not
based on object identifiers or file names, but rather on content-based filters.
We see no fundamental barriers to incorporating filters in PADS to identify sets
of related objects. This would allow system designers to set up subscriptions
and maintain consistency state in terms of filters rather than object-name
prefixes.
DHT-based systems. DHT-based storage systems such as BH [87], PA-
ST [76], and CFS [21], allow different nodes to store subsets of different data
(PR). However, they implement a specific update propagation topology and
replication policy that makes it difficult to maintain update ordering informa-
tion across objects. Therefore, they only provide weak per-object coherence
guarantees.
Tunable systems. Systems like the TACT toolkit [43] and Swarm [85]
provide applications with a menu of options for consistency and dynamically
initiate update propagation (or reconciliations) in order to meet the specified
166

consistency levels. However, in order to support the range of consistency levels,
they impose restrictions either on replication or topology. For example, the
TACT toolkit only supports full replication and Swarm assumes hierarchical
topology in addition to full replication. On the contrary, PADS is able to
support the whole range of TACT consistency dimensions without imposing
the replication and topology restrictions. Fluid replication [20] also exposes a
range of consistency options. It dynamically creates replicas and carries out
reconciliations to meet performance and consistency needs. However, it only
supports hierarchical topology. In fact, like PADS, fluid replication employs
update summaries to to quickly transfer update inform and establish update
ordering at the server. However, unlike PADS, these summaries are only sent
from waystations to the server, rather than on all communication links.
Other systems like Deceit [80], WheelFS [84], and Dynamo [25], provide
applications with a wide range of options to control the level of replication,
placement of replicas, and the sizes of read/write quorums for a given topology.
Because every object may have a different replication policy, it is difficult to
support cross-object consistency. Instead, these systems provide a range of
single-object guarantees, from one-copy serializability to maximum staleness
to eventual consistency, that can be specified with the provided options.
10.2 Declarative Domain Specific Languages
R/OverLog falls in the same category of declarative domain specific lan-
guages (DSL) such as SQL [3], HTML [1], OverLog [56], and SQCK [35], that
167

have been used to aid development. The common benefit of these languages
is that they allow designers to specify high-level intent rather than implement
low-level details (i.e. what to do rather than how to do). For example, the
SQL select statement describes what data is required and not how it should
be retrieved, an HTML file describes what the interface should look like and
not how it should be rendered, and an OverLog program describes what data
flows should be established but does not explicitly establish them. Similarly,
an R/OverLog policy describes what update paths should be established but
does not implement the update propagation protocol.
These languages rely on an underlying layer that takes care of the
low-level details required to implement the high-level intent. A high-level
specification has multiple benefits. First, it leads to concise programs making
them easy to maintain and modify. Second, it is portable in the sense that
the program is isolated from specific implementations and optimizations of the
underlying layer.
A common criticism for R/OverLog is the steep learning curve. How-
ever, as the popularity of SQL and HTML indicate, a declarative DSL can be
the better approach for some tasks. R/OverLog demonstrates the feasibility
of a declarative approach for the first generation of the systems. Perhaps in
the next generation, effort should be spent on developing a more user-friendly
syntax to further aid development.
On a different note, Mace [48]/Macedon [74] is another event driven
language for setting up network overlays. It uses the abstraction of finite
168

state machine for describing overlays. We do not use Mace in PADS because
we worry about the number of states that need to be defined for a node in
order to handle failures and recovery of multiple subscriptions and for various
consistency policies. However, given that Ramasubramanian et. al. [70] have
used Mace to implement the Cimbiosys distributed file system, it would be
interesting to compare the ease of defining PADS policy with Mace and with
R/OverLog.
10.3 Conflict Detection
PADS focuses on syntactic conflict detection based on the causal re-
lationship [52] rather than relying on any application-specific semantics. In
particular, any two updates to the same object are not causally related are
considered to be conflicting.
Current schemes to detect conflicts fall into three main families:
• Previous stamps. In this approach [16, 33], whenever an object is over-
written, the time stamp of the previous version previous stamp is also
stored. When the update is propagated to another node, the previous
stamp is also sent with the write stamp of the update. When a node re-
ceives an update, it compares the previous stamp of the received update
with the write stamp of the locally stored version. If they mismatch,
then the update is marked as a conflict. This approach can accurately
detect all conflicts in any log exchange protocol that ensures the prefix
169

property [22], but it adds an extra per-update overhead for both storage
and network bandwidth. More importantly, in the case when the log is
truncated and a node falls back to state-based exchange, false positives
are possible due to missing intermediary updates.
• Hash histories. Kang et. al. [45] use hash histories to detect conflicts.
Whenever an update is locally applied, a node creates a new hash sum-
marizing the entire current state. Each node keeps a list of hashes or-
dered by when they were generated. Whenever a node A synchronizes
its state with another node B, it looks up B’s last hash in its own hash
history. If the hash exists, then A’s version is a newer version. Similarly,
if B finds A’s last hash in B’s hash history, then B’s version is a newer
version. If neither of the last hashes exists in the other’s history, then
the system marks the synchronization as conflicting. Although the size
of hash history is independent of the number of replicas, it grows pro-
portionally to the total number of updates. More importantly, because
hashes summarize the entire local state, false positives are can occur
when different objects are concurrently updated.
• Version vectors. Many systems [37, 49, 71, 77] use version vectors to de-
tect conflicts. A version vector [44] accurately captures the causality
relationship between two updates. Two writes are conflicting if and only
if neither of their version vectors dominates the other. Although this
approach can accurately detect conflicts, it is expensive to maintain a
version vector for every object, especially in large-scale systems.
170

Predecessor vectors with exceptions (PVE) [59] and vector sets [58] are
variations of the version vectors approach employed by WinFS [67] designed
to reduce the total number of version vectors maintained and communicated.
PVEs can reach an unbounded size if synchronizations are frequently dis-
rupted, making them unsuitable for environments with intermittent connec-
tions. Vector sets maintain predecessor vectors for subsets of data, and in
the worst case, have overheads equivalent to a simple version vector scheme.
PADS’s dependency summary vectors (DSV) are actually equivalent to prede-
cessor vectors. However, due to the properties of the synchronization protocol,
instead of storing DSVs, explicitly in a data structure, PADS derives them from
the consistency meta-data already stored. In addition, the metadata stored
and sent during synchronization does not increase with network disruptions.
Chapter 8 evaluates the overheads of PADS and demonstrates that PADS’s
overheads are equivalent to other state-of-the-art schemes.
171

Chapter 11
Limits and Future Work
PADS’s flexibility sufficient covers a broad range of systems. However,
because of the small API, there are several design aspects and trade-offs it
does not expose to designers. This chapter discusses the limits of the PADS
architecture and the avenues of the future work that can be explored.
11.1 Limits
The limits of PADS can be roughly divided into three categories:
• Limits imposed by ther model itself: There are several high-level design
aspects, such as security and transactions, that are not covered by the
routing and blocking abstractions.
• Limited extensibility of the implementation: The mechanisms layer pro-
vides a default implementation of PADS primitives. Even though the
default implementation is generally applicable, some parts may need to
be reimplemented to build systems that are better suited for the target
requirements.
172

• Limited parameters for performance tuning: The mechanisms layer pro-
vides limited options to tweak current primitive implementation leading
to non-optimal system performance.
In this section, we discuss each category in turn.
11.1.1 PADS Model
The routing and blocking abstractions exposed by PADS do not cover
the following aspects that play an important role in distributed storage system
design:
Security. An important part of distributed data storage system design de-
fines the security guarantees a system provides. Security guarantees cover the
following properties:
• Data access control: ensures that data is accessible only to authorized
users.
• Data integrity: ensures that any malicious or accidental altering of data
can be detected.
• Data privacy: ensures that no information (such as the amount of data
stored or pattern of access) is exposed to unauthorized users.
Different systems provide different levels of guarantees for each security
property. In order to enforce these guarantees, a wide range of technologies,
173

such as encryption, secure channels, access control lists and trusted hardware,
are used.
Security specification does not match the blocking and routing abstrac-
tions provided by the current PADS model. We should consider augmenting
the PADS architecture to allow security specification as a separate policy com-
ponent. We suspect that the security abstraction would allow designers to
address three aspects:
• Basic access control: It seems plausible that straightforward use of en-
cryption and signatures could secure reads and writes so that one is only
able to read and write an object if one has the appropriate credentials.
• Flexible policy hooks: It seems plausible to add something similar to the
five blocking points to manage encryption and validation decisions.
• Consistency: In addition to enforcing security on reads and writes, se-
curing on ordering is also needed. It may be plausible to apply the
content-hash based protocol describe by Mahajan et. al. [57] for that
purpose.
Distributed transactions. The current PADS model is sufficient for a
small subset of distributed transactions. For example, for a single update,
two-phase commit can be implemented by writing appropriate routing policy
and blocking policy and using the assign seq action to commit updates (re-
fer to Section 5.4.7). However, for transactions that involve reads and writes
174

to multiple objects stored across multiple nodes, the PADS model falls short.
Applications have no means to specify what reads and writes make up a trans-
action. Also, because only a single version of an object is maintained, if the
transaction that created the updated is aborted, the mechanisms do not sup-
port rollback to a previously committed version.
We suspect that support for distributed transactions can be easily
added by implementing a tentative buffer that stores intermediate results and
a primitive that moves tentative updates to stable store once the transaction
is committed. We would also require additional triggers that provide informa-
tion about the propagation of tentative updates so that appropriate commit
policies can be implemented.
Erasure coding. PADS provides data availability by employing data repli-
cation rather than erasure coding. Even though PADS objects cannot be
erasure-coded, PADS can be used to replicate erasure-coded fragments. A
library can be implemented at the read/write interface that translates a file
into fragments and stores each fragment a separate PADS object. The routing
policy and the blocking policy can be used to specify how the fragments are
replicated.
Quorums. Some distributed storage systems [25] use quorums to provide
consistency guarantees. Write quorums can be easily implemented with cur-
rent blocking and routing abstractions—every node sends an ACK to the orig-
175

inal writer when it receives an update and the writeAfterBlock predicate is set
to unblock if sufficient ACKS have been received. However, implementing a
read quorum with PADS is complex. It involves implementing a library over
the read/write interface that enforces the read quorum—when an object is
read, out-of-band communication is used to retrieve data from other nodes,
consolidate the responses, and return the latest version. It would good to allow
designers to easily specify read and write quorums.
11.1.2 Extensibility
The implementation of PADS makes specific choices that work well
for a broad range of environments. These choices are not fundamental to
the PADS architecture but have implications for performance, resource, and
availability guarantees of the system. Sometimes a designer may want to
change specific aspects of the system in order to optimize the system for the
target environment. The aspects can include:
• Local storage: In the current implementation, BerkeleyDB is used as the
back-end for the persistent update log and the in-memory data store.
Designers may want to control how data is locally stored for perfor-
mance reasons, such as allowing objects to be stored as fixed-size chunks
rather than as variable-sized byte-ranges, compressing stored bodies, im-
plementing an in-memory-only log, customizing when the log or store is
synchronized to disk, or using a different back-end for storing data.
176

• Replacement protocols: Currently, objects in the store are never replaced.
Designers may want to implement cache replacement protocols (such as
LRU or priority-based schemes) to control the resources taken up by the
storage.
• Network protocol: Currently, all communication occur over TCP connec-
tions. Designers may want to use connections for data propagation and
policy communication that is best suited for their needs, such as TCP-
Nice connections, UDP connections, secure connections, delay-tolerant
connections, and pluggable protocols.
• Namespace: PADS imposes a hierarchical namespace on objects. For
example, the string /a/* covers all objects with the prefix /a/ such as
/a/x and /a/y. This hierarchy is used as a basis for subscription es-
tablishment and for specifying imprecise invalidation target sets. The
hierarchical namespace is well suited for implementing systems that use
the file-name abstraction for access. However, increasingly tags or fil-
ters [70] are being used to access data and the hierarchical namespace is
not efficient for filter-based access. Designers may want to modify how
the object namespace is defined so that alternate access schemes can be
efficiently implemented. For example, by using bloom filters, a group of
unrelated objects can be concisely summarized.
• Conflict resolution: Current implementation uses the last-writer-wins
scheme to resolve conflicting updates (i.e. for two conflicting updates,
177

one of them will overwrite the other). With this scheme, one of the
updates is lost which may not be acceptable for all applications. Some
applications require that the final version of the object consolidate both
updates in a manner that may be application-dependent. For exam-
ple, an object that represents a directory object in a file system will be
consolidated differently from an object that represents a shopping-cart
object [25].
Currently, if a designer wants to change a certain aspect of the imple-
mentation, she has to make that modification by hand. The PADS imple-
mentation is sufficiently modular—changing one of the above aspects requires
updates to only a small part of the system. One can imagine making all
this extensible—by defining interfaces so that designers can pick or plug in
alternative implementations.
11.1.3 Current Implementation Limits
In addition to providing a single standard implementation of the prim-
itives, the current mechanisms layer also hides options that if exposed, would
lead to more efficient implementations. These options include:
• Scheduling of outgoing updates: Currently, if an invalidation subscrip-
tion and a body subscription are established from Node A to Node B,
whenever an update occurs at Node A, the invalidation and the body
of the update are sent immediately to Node B. If the timing of when
178

the updates are sent can be controlled, then techniques to improve per-
formance can be incorporated [64]. These techniques include removing
updates pertaining to temporary objects, and batching updates so that
for quick consecutive updates to the same file, only a single body is sent.
• Splitting and joining interest-sets: Currently, consistency-related meta-
data such as preciseness is maintained on a per interest set basis. The
meta-data is stored as a version vector in a hierarchical structure, called
ISSTATUS, in which each node corresponds to an interest set. Depend-
ing on the subscriptions established and the imprecise invalidations re-
ceived, the hierarchical structure may be split to store version vectors
associated with smaller interest sets. For example, assuming that ini-
tially the ISSTATUS stores a version vector for /a/*. If an incoming
subscription is established for the object /a/x, the interest set in the
ISSTATUS is split so that it stores 2 version vectors—one for /a/x and
another version vector for all other objects in /a/*. If another incoming
subscription is established for /a/y, then the interest set is split further
to store a version vector for /a/y separately. If many such subscrip-
tions are established, it is possible that over the course of time, a version
vector is stored for every local object. By implementing the capability
of joining interest sets and allowing designers to specify the policy for
splitting and joining interest sets, designers gain fine grained control over
how meta-data is maintained and possibly lead to storage savings.
179

• Generation of imprecise invalidations: Currently, for an outgoing sub-
scription, an imprecise invalidation is generated for one of two reasons: a
precise invalidation needs to be sent on the subscription or the time since
the last precise invalidation was sent has reached the threshold time (i.e.
a time out). In the first case, the imprecise invalidation summarizes all
updates that have occurred to objects not in the subscription set since
the last precise invalidation sent. In the second case, the imprecise inval-
idation summarizes all updates that have occurred to objects not in the
subscription set since the last precise invalidation sent up to the current
time.
Since current generation policy aims to be conservative and to achieve
good compression, the granularity of the imprecise invalidation may be
too big and make a larger-than-necessary portion of the receiver’s objects
imprecise. For example, in order to summarize updates to /a/x/p and
to /a/y/q, an imprecise invalidation for /a/* may be generated. This
invalidation will make the whole /a/* subtree imprecise and possibly
making all objects in /a/* unavailable for access. By exposing the pol-
icy for the generation of imprecise invalidations, the granularity of the
imprecise invalidations can be controlled in order to improve the overall
data availability.
180

11.2 Future Work
This dissertation opens up several avenues for future work that can be
important improvements to PADS as a development platform.
11.2.1 Streamlined Implementation
The performance achieved by PADS is not sufficient for demanding
workloads. We suspect that the following aspects of the mechanisms layer can
be redesigned or reimplemented to improve the performance.
• Instead of allowing updates to cover variable-sized byte-ranges of an ob-
ject, we should consider restricting updates to fixed-size chunks, like the
NFS protocol. Because different parts of an object are stored as variable-
sized chunks corresponding to different byte-ranges, extra complexity is
introduced for storage, body look-up, and meta-data maintenance. For
example, when an update is received, the update may overlap multiple
chunks but partially overlap some chunks. Extra processing is needed to
detect overlap boundary, consolidate the chunks and update the meta-
data for each chunk. By storing only fixed size chunks, much complexity
can be reduced.
• The data store currently a big bottleneck for local read/write perfor-
mance. The back-end of the data store is BerkeleyDB. Even though, the
BerkeleyDB environment is configured to asynchronously sync to disk,
BerkeleyDB carries out a lot of processing under-the-hood, such as log
181

garbage collection, transaction locks, etc. We may want to consider im-
plementing a custom in-memory store that can give us better control
over the performance.
• We may want to redesign how meta-stored is stored and how it is up-
dated when an invalidation is received. Currently, when an invalidation
is locally applied, it requires updating object meta-data, the meta-data
associated with the byte-range, and clearing up invalid bytes. This op-
eration involves several database accesses and can be pretty slow if mul-
tiple threads are updating the meta-data. Perhaps performance can be
improved by implementing in-memory meta-data maintenance and finer-
grained locks for meta-data and object stores.
• The current implementation of outgoing body subscriptions is inefficient.
Whenever an outgoing body subscription is established, every byte-range
in the object store is iteratively scanned in order to look for bodies that
belong to the subscription set and that are newer than the subscription
start-time. If the store contains a lot of objects, this scan can take a
very long time. It is plausible that by introducing secondary keys or by
maintaining extra bookkeeping at the object level, the time required for
subscription establishment can be reduced.
• The mechanisms layer maintains several buffers that have no clean up
policy allowing them to increase in size indefinitely. These include the
body buffer that keeps bodies that arrived before their corresponding
182

invalidations, and the object store that does not implement any object
replacement policy. It will be beneficial spend some effort to track down
such buffers and implement appropriate clean-up policies.
• We should consider implementing protocols to summarize version vec-
tors. Since meta-data is maintained in terms of version vectors, the
overheads are proportional to the number of nodes in the system. For
environments that involve a large number of nodes, such as clusters and
data centers, PADS imposes unacceptable overheads.
11.2.2 Formal Model and Verification
Designs and implementations of distributed data storage systems are
complex and proving that they are correct can be difficult. In fact, ensur-
ing that a system meets its consistency guarantees is further complicated by
concurrent updates and failures.
With PADS, because a system is described with a high-level language
over a small set of abstractions, we can reason about it more easily. It is
plausible that we can take advantage of the abstractions provided by PADS
to develop a formal model that can allow designers to check or prove high-
level properties of their systems. The model should allow designers to specify,
check, and/or verify both the safety and the liveness properties of systems (i.e.
whether consistency guarantees are satisfied or whether the implementation is
free from deadlocks).
One approach to verify a system is to create a model of the system, ver-
183

ify the model and generate an executable/deployable system from the model.
This approach requires writing the PADS architecture, the system design, and
the system constraints in a modeling language such as Murφ [27], Promela [2],
or MACE [48]. A model checker is run to ensure that the design meets the
specified constraints. Once the model is verified, the model is translated so
that it can be executed. There are two options for translation. First, the trans-
lator can generate R/OverLog code and blocking conditions that work with
the current PADS implementation. Alternatively, the model can be translated
directly into C++ or Java code. This option is relevant if we were to use
MACE as the modeling language which directly generates C++ code. How-
ever, its state-machine abstraction is does not easily match current PADS
abstractions. The implications of this option need to be further examined
since it may require a rewrite of the underlying framework.
Another possible approach is to do just the opposite. Instead of spec-
ifying a system in a modeling language, the system is written in terms of
R/OverLog rules and blocking conditions and is then either directly checked
or is translated into a modeling language that can be checked.
Whatever the approach, the main challenge is to define a constraint lan-
guage so that consistency, availability, performance and durability constraints
of a distributed storage system can be easily written and verified. Pip [72]
uses a declarative language for specifying expected behaviour of systems. Its
declarative nature makes it an attractive candidate for specifying constraints
in PADS. Its applicability in the context of distributed storage systems requires
184

further study.
On a different note, some checkers, such as CystalBall [91], MaceODB [24],
and Pip, verify that a system is running correctly during execution. The ad-
vantage of this approach is that in addition to safety and liveness properties,
performance and resource constraints can also be specified.
11.2.3 Self-tuning File System
Current technology trends indicate that the amount of data users gen-
erate and access on a daily basis is on an increase. In addition, users have
access to a wide range of devices including mobile phones, laptops, netbooks,
ebooks, portable music players. Because multiple copies of a user’s data may
be spread over multiple devices, data management becomes a major headache.
For an average user, locating latest versions of data, consolidating divergent
copies, and ensuring that the required data is always available is no easy feat.
In fact, with most devices being equipped with multiple networking
technologies, such as WIFI, Bluetooth, and 3G connections, and the almost-
always availability of cloud storage, it should be possible to implement a dis-
tributed file system that transparently manages user data, enabling users to
access the latest version of their data from any device without any effort. In
addition, the file system should be self-tuning, i.e. it should be able take into
account available Internet and peer connectivity, costs for cloud storage, usage
patterns and available battery life in order to to propagate data along paths
that yield the best monetary costs, power, or performance tradeoffs.
185

Our preliminary design for such a file system is based on a client-server
scheme with support for peer-to-peer transmissions. Because of its availability,
cloud storage is best suited to act as the server for meta-data and a large
portion of recently accessed data. Updates are propagated based on an eager-
meta-data-lazy-data scheme—whenever an update occurs, the meta-data is
quickly propagated to the cloud whereas the data of the update is sent if
the opportunity is appropriate. The advantage of this approach is that the
eager meta-data propagation makes it easy to keep track of where the latest
version of an object is, and the lazy data propagation makes it possible to
delay sending the data if the network conditions are not good (i.e. either
the network is too slow or not energy-efficient). As the first step, we have
designed a policy that focuses on energy efficiency that can potentially lead
to two orders of magnitudes of savings [15]. However, more work needs to
be done to build a hero file system that self-tunes and ensures that data is
accessible most the time.
11.2.4 New Applications
PADS makes it easy to implement and enforce consistency guarantees
for distributed data. It would be interesting to explore whether we can apply
PADS to domains other that data storage. One domain in which PADS can
be useful is structured overlays. Structured peer-to-peer overlays are often
used as the underlying substrate for content-dissemination, file sharing and
VOIP applications. Most existing overlay protocols [75, 83, 95] focus on the
186

design of overlay topology, reducing maintenance costs, and improving rout-
ing performance. They do not focus on enforcing consistency of the routing
information stored at each node. The lack of consistency guarantees can re-
sult in routing errors especially during failures and churn. By enforcing routing
consistency and reducing routing errors, it is possible to provide better overlay
performance, availability, and in turn, better QOS guarantees to applications.
Unfortunately, enforcing routing consistency is complex [19] and so most sys-
tems give up on consistency and implement mechanisms to detect and remove
erroneous state instead [83].
We suspect that the complexity of enforcing consistency can be reduced
if PADS is used as the infrastructure to maintain and propagate routing state.
First, PADS provides high-level abstractions with which consistency semantics
can be easily specified. Second, PADS mechanisms ensure that updates are
sent in order. Third, with the support of formal verification, it is possible to
prove that consistency guarantees are enforced even during failures.
187

Chapter 12
Conclusion
This dissertation aims to make it easier to build new distributed storage
systems. In order to achieve this goal, it presents the PADS approach according
to which development is carried out by specifying policy over an underlying
mechanisms layer. In order to demonstrate the benefits of this approach,
instead of building a single new distributed storage system, this dissertation
constructs several systems inspired from literature that cover a broad spectrum
of the design space. This chapter summarizes the contributions of this work
and the research lessons learned.
12.1 Contributions
From a developer’s point of view, using the PADS has several advan-
tages: First, it provides a clean separation of system design into routing pol-
icy and blocking policy. Second, it is sufficiently flexible to support a broad
range of systems which is demonstrated by the fact that we have built client-
server systems, server-replication systems, and object-replication systems with
PADS. Third, development on PADS is significantly easier and shorter than
building a system from scratch. The systems constructed on PADS required
188

less than a hundred routing rules and a couple of blocking conditions; each re-
quired about a few weeks of development time. Fourth, the systems developed
on PADS can be easily modified to incorporate new features or address new
requirements. Lastly, the overheads associated with the PADS prototype are
within small constant factors of hand-tuned systems.
In the development and the evaluation of the PADS approach, this
thesis makes the following contributions:
• It demonstrates that the effort required to build distributed storage sys-
tems can be significantly reduced by adopting a policy specification-
based approach.
• It defines a new dichotomy for distributed storage system design. In
particular, system design and implementation is separated into routing
policy that addresses performance and availability goals, and blocking
policy that addresses consistency and durability concerns.
• It demonstrates that a small API is sufficient to build a broad range of
distributed storage systems.
• It defines and provides an implementation of a general set of replication
mechanisms that are sufficiently flexible to support all three PR-AC-TI
properties.
• It defines a new domain specific language, R/OverLog, that allows con-
cise and elegant specification of routing policy.
189

• It provides a set of useful prototypes for different distributed storage
systems that can be deployed for moderating workloads.
12.2 Research Experience
The most important lesson we learned during the pursuit of this thesis is
that a great solution is often the result of well thought out evolution. Similarly,
current PADS is the result of 4 stages of evolution.
We started with a basic mechanisms layer which had an extensive API.
Unfortunately, we had no concrete way to map the designs of existing systems
on to the provided API. We realized that a lot of the design of distributed
storage systems is routing of information among nodes. That realization en-
abled us to develop the subscriptions primitive. We were also able to take
advantage of OverLog, and later R/OverLog, to define routing policy.
In the second step of the evolution, we were struggling with how to
cleanly define the “rest” of the system design. We realized that the “rest” boils
down to consistency and durability guarantees which could be implemented
by blocking access to data. At first, we required that systems designers imple-
ment libraries over the local interface and only some simple read-block flags
were provided. However, after implementing several consistency libraries, we
noticed that the enforcement of consistency guarantees often required looking
up local consistency bookkeeping and sending or waiting for messages from
routing policy. This observation led to the definition of blocking points and
blocking predicates.
190

The next step in the evolution was the definition of the stored events
interface. During the development of P-Pangaea, we realized that the routing
and blocking API were not sufficient to allow us to persistently store gold node
information. We designed the stored event interface so that local data objects
can be easily accessed in a manner that works well with the event-driven
model for routing policy. The stored events interface also allowed reading
and writing configuration information such as server IDs into objects. We
previously handled configuration information in ad-hoc ways such as hard-
coding it in the routing policy.
Finally, the last step in the evolution was the addition of the commit
operation and the isSequenced predicate. We found difficulty in implementing
the primary-commit protocol due to the lack of ordering guarantees provided
by R/OverLog. For example, when a primary commits updates, the commit
information may be sent to different nodes in different orders. By introducing
the commit operation and by ensuring that commit invalidations are causally
transferred, we were able to implement the primary-commit protocol in a clean,
concise manner.
191

Appendices
192

Appendix A
Code Listings
This appendix provides the code listings for the systems constructed
with PADS. In order to make it the R/OverLog code easier to read, we add
prefixes to R/OverLog tuples: ACT for actions that call into the mechanisms
layer, TRIG for triggers from the mechanisms layer, TBL for table lookups, RCV
for events received via the stored events interface, and B ACT for actions that
go to blocking policy. For the blocking policy, we only list the predicates that
are not set to the default “true” value.
A.1 Simple Client Server (P-SCS)
The implementation of P-SCS requires 24 routing rules and 5 blocking
conditions.
A.1.1 Routing Policy
/***********************************************************************/
// Initialization: Read server configuration, and
// store serverId in a table
/***********************************************************************/
in1 ACT readEvent(@X, ObjId) :-
initialize(@X), ObjId = "/.serverCFG".
in2 TBL server(@X, S) :-
RCV serverConfig(@X, S).
193

/***********************************************************************/
// Client establishes subscriptions to
// server for transferring updates.
/***********************************************************************/
csSb1 ACT addInvalSub(@X, X, S, SS, CTP) :-
RCV serverConfig(@X, S), SS="/*", CTP=="LOG", X 6=S.
csSb2 ACT addBodySub(@X, X, S, SS) :-
RCV serverConfig(@X, S), SS="/*", X 6=S.
csSb3 ACT addInvalSub(@X, X, S, SS, CTP) :-
TRIG subEnd(@X, X, S, SS, , Type), Type=="inval", CTP=="LOG".
csSb4 ACT addBodySub(@X, X, S, SS) :-
TRIG subEnd(@X, X, S, SS, , Type), Type=="body".
/***********************************************************************/
// On read miss, client store info in a table and informs server.
/***********************************************************************/
rm1 TBL readMiss(@C, Obj, Off, Len) :-
TRIG operationBlock(@C, Obj, Off, Len, Bpoint, ),
Bpoint == "readAt", TBL serverId(@C, S), C 6=S.
rm2 clientRead(@S, C, Obj, Off, Len) :-
TRIG operationBlock(@C, Obj, Off, Len, Bpoint, ),
Bpoint == "readAt", TBL serverId(@C, S), C 6=S.
/***********************************************************************/
// On client read miss, server sends body and establishes callback
/***********************************************************************/
cb1 ACT sendBody(@S, S, C, Obj, Off, Len) :-
clientRead(@S, C, Obj, Off, Len).
cb2 ACT addInvalSub(@S, S, C, Obj, CTP) :-
clientRead(@S, C, Obj, Off, Len), CTP = "CP".
cb3 TBL hasCallback(@S, Obj, C) :-
clientRead(@S, C, Obj, Off, Len),
/***********************************************************************/
// When client receives an invalidation, if it does
// not satisfy a read miss, ack server and cancel callback.
// Otherwise, remove it from the miss table
/***********************************************************************/
rinv0 satsifiesReadMiss(@C, S, Obj, Off, Len, Writer, Stamp, a COUNT<*>) :-
TRIG invalArrives(@C, S, Obj, Off, Len, Writer, Stamp),
TBL serverId(@C, S), S 6=C,
TBL readMiss(@C, S, Obj, Off, Len).
rinv1 ackServer(@S, C, Obj, Off, Len, Writer, Stamp) :-
satsifiesReadMiss(@C, S, Obj, Off, Len, Writer, Stamp, Count), Count==0,
rinv2 ACT removeInvalSub(@C, S, C, Obj) :-
satsifiesReadMiss(@C, S, Obj, Off, Len, Writer, Stamp, Count), Count==0,
rinv3 delete TBL readMiss(@C, S, Obj, Off, Len) :-
satsifiesReadMiss(@C, S, Obj, Off, Len, Writer, Stamp, Count), Count > 1.
194

/***********************************************************************/
// When server receives an invalidation,
// gather acks from others who have callbacks.
// Note:
// - Acks are accumulative so one received ack also
// satisfies all previous required acks.
// - needAck table keeps track of which acks are needed.
/***********************************************************************/
ack1 TBL needAck(@S, Obj, Off, Len, C2, Writer, Stamp, Need) :-
TRIG invalArrives(@S, C, Obj, Off, Len, Writer, Stamp),
TBL hasCallback(@S, Obj, C2), C2 6= Writer,
Need = 1, TBL serverId(@S, S).
ack2 TBL needAck(@S, Obj, Off, Len, C2, Writer, Stamp, Need) :-
TRIG invalArrives(@S, C, Obj, Off, Len, Stamp, Writer),
C2 == Writer, Need = 0, TBL serverId(@S, S).
ack3 TBL needAck(@S, Obj, Off, Len, C, Writer, NeedStamp, Need) :-
ackServer(@S, C, , , , , RecvStamp),
TB needAck(@S, Obj, Off, Len, C, Writer, NeedStamp, ),
NeedStamp < RecvStamp, Need= 0, TBL serverId(@S, S).
ack4 TBL needAck(@S, Obj, C, Writer, NeedStamp, Need) :-
ackServer(@S, C, , , , RecvWriter, RecvStamp),
TBL needAck(@S, Obj, C, NeedWriter, NeedStamp, ),
NeedStamp == RecvStamp, NeedWriter <= RecvWriter,
Need= 0, TBL serverId(@S, S).
ack5 delete TBL hasCallback(@S, Obj, C) :-
TBL needAck@S, Obj, , , C, , , Need)
Need = 0, TBL serverId(@S, S).
ack6 acksNeeded(@S, Obj, Off, Len, Writer, Recvtamp, a COUNT<*>) :-
TBL needAck(@S, Obj, Off, Len, C, Writer, RecvStamp, NeedTrig),
TBL needAck(@S, Obj, Off, Len, C, Writer, RecvStamp, NeedCount),
NeedTrig == 0, NeedCount == 1.
/***********************************************************************/
// If no more acks are needed, assign Sequence number,
// inform client, and clear out ack table
/***********************************************************************/
ack7 ACT assignSeq(@S, Obj, Off, Len, Stamp, Writer) :-
acksNeeded(@S, Obj, Off, Len, Writer, RecvStamp, Count), Count == 0.
ack8 BACT writeComplete(@Writer, Obj) :-
acksNeeded(@S, Obj, Off, Len, Writer, RecvStamp, Count), Count == 0.
ack9 delete TBL needACK(@S, Obj, C, WriterId, RecvStamp, Need) :-
acksNeeded(@S, Obj, Off, Len, Writer, RecvStamp, Count), Count == 0.
A.1.2 Blocking Policy
Blocking Point PredicateReadNowBlock isValid and isComplete and isSequenced (at Client)WriteAfterBlock B Action(writeComplete, objId) (at Client)ApplyUpdateBlock isValid (at Client & Server)
195

A.2 Full Client Server (P-FCS)
The implementation of P-FCS requires 43 routing rules and 6 blocking
conditions.
A.2.1 Routing Policy
/***********************************************************************/
// Initialization: Read server configuration, and
// store serverId in a table
/***********************************************************************/
in1 ACT readEvent(@X, ObjId) :-
initialize(@X), ObjId = "/.serverCFG".
in2 TBL server(@X, S) :-
RCV serverConfig(@X, S).
/***********************************************************************/
// Client establishes subscriptions to
// server for transferring updates.
/***********************************************************************/
csSb1 ACT addInvalSub(@X, X, S, SS, CTP) :-
RCV serverConfig(@X, S), SS="/*", CTP=="LOG", X 6=S.
csSb2 ACT addBodySub(@X, X, S, SS) :-
RCV serverConfig(@X, S), SS="/*", X 6=S.
csSb3 ACT addInvalSub(@X, X, S, SS, CTP) :-
TRIG subEnd(@X, X, S, SS, , Type), Type=="inval", CTP=="LOG".
csSb4 ACT addBodySub(@X, X, S, SS) :-
TRIG subEnd(@X, X, S, SS, , Type), Type=="body".
/***********************************************************************/
// On read miss, client stores info in a table and informs server.
/***********************************************************************/
rm1 TBL readMiss(@C, Obj, Off, Len) :-
TRIG operationBlock(@C, Obj, Off, Len, Bpoint, ),
Bpoint == "readAt", TBL serverId(@C, S), C 6=S.
rm2 clientRead(@S, C, Obj, Off, Len) :-
TRIG operationBlock(@C, Obj, Off, Len, Bpoint, ),
Bpoint == "readAt", TBL serverId(@C, S), C 6=S.
/***********************************************************************/
// If peer fails to send body, ask server to send body.
/***********************************************************************/
cc1 ACT sendBody(@S, S, C, Obj, Off, Len) :-
TRIG sendBodyFailed(@C, , C, Obj, Off, Len, , ).
/***********************************************************************/
// On client read miss, server establishes callback and finds
// another client with callbacks to send the body.
/***********************************************************************/
196

cb1 ACT addInvalSub(@S, S, C, Obj, CTP) :-
clientRead(@S, C, Obj, Off, Len), CTP = "CP".
cb2 TBL hasCallback(@S, Obj, C, T) :-
clientRead(@S, C, Obj, Off, Len), T=f now().
cc2 anyPeerAvailable(@S, C, Obj, Off, Len, a Count<*>) :-
clientRead(@S, C, Obj, Off, Len),
TBL hasCallback(@S, Obj, C2, ).
cc3 selectedPeer(@S, C, Obj, Off, Len, a RANDOM<C2>) :-
anyPeerAvailable (@S, C, Obj, Off, Len, Count), Count > 0.
TBL hasCallback(@S, Obj, C2, ).
cc4 ACT sendBody(@SP, SP, C, Obj, Off, Len, , ) :-
seletedPeer(@S, C, obj, Off, Len, SP).
cc5 ACT sendBody(@S, S, C, Obj, Off, Len) :-
anyPeerAvailable (@S, C, Obj, Off, Len, Count), Count==0.
/***********************************************************************/
// When client receives an invalidation,
// checks if it satisfies a read miss. If so,
// removes it from the table. If not, ACK server.
/***********************************************************************/
rinv0 satsifiesReadMiss(@C, S, Obj, Off, Len, Writer, Stamp, a COUNT<*>) :-
TRIG InvalArrives(@C, S, Obj, Off, Len, Writer, Stamp),
TBL serverId(@C, S), S 6=C, TBL readMiss(@C, S, Obj, Off, Len).
rinv1 ackServer(@S, C, Obj, Off, Len, Writer, Stamp) :-
satsifiesReadMiss(@C, S, Obj, Off, Len, Writer, Stamp, Count), Count==0,
rinv2 delete TBL readMiss(@C, S, Obj, Off, Len) :-
satsifiesReadMiss(@C, S, Obj, Off, Len, Writer, Stamp, Count), Count > 1.
/***********************************************************************/
// When server receives an invalidation,
// gather acks from others who have callbacks.
// Note:
// - Acks are accumulative so one received ack also
// satisfies all previous required acks.
// - needAck table keeps track of which acks are needed.
/***********************************************************************/
ack1 TBL needAck(@S, Obj, Off, Len, C2, Writer, Stamp, Need) :-
TRIG invalArrives(@S, C, Obj, Off, Len, Writer, Stamp),
TBL hasCallback(@S, Obj, C2, ), C2 6= Writer,
Need = 1, TBL serverId(@S, S).
ack2 TBL needAck(@S, Obj, Off, Len, C2, Writer, Stamp, Need) :-
TRIG invalArrives(@S, C, Obj, Off, Len, Stamp, Writer),
C2 == Writer, Need = 0, TBL serverId(@S, S).
ack3 TBL needAck(@S, Obj, Off, Len, C, Writer, NeedStamp, Need) :-
ackServer(@S, C, , , , , RecvStamp),
TB needAck(@S, Obj, Off, Len, C, Writer, NeedStamp, ),
NeedStamp < RecvStamp, Need= 0, TBL serverId(@S, S).
197

ack4 TBL needAck(@S, Obj, C, Writer, NeedStamp, Need) :-
ackServer(@S, C, , , , RecvWriter, RecvStamp),
TBL needAck(@S, Obj, C, NeedWriter, NeedStamp, ),
NeedStamp == RecvStamp, NeedWriter <= RecvWriter,
Need= 0, TBL serverId(@S, S).
ack5 delete TBL hasCallback(@S, Obj, C, ) :-
TBL needAck@S, Obj, , , C, , , Need)
Need = 0, TBL serverId(@S, S).
ack6 acksNeeded(@S, Obj, Off, Len, Writer, Recvtamp, a COUNT<*>) :-
TBL needAck(@S, Obj, Off, Len, C, Writer, RecvStamp, NeedTrig),
TBL needAck(@S, Obj, Off, Len, C, Writer, RecvStamp, NeedCount),
NeedTrig == 0, NeedCount == 1.
/***********************************************************************/
// If no more acks are needed, assign Sequence number,
// inform client, and clear out ack table
/***********************************************************************/
ack7 ACT assignSeq(@S, Obj, Off, Len, Stamp, Writer) :-
acksNeeded(@S, Obj, Off, Len, Writer, RecvStamp, Count), Count == 0.
ack8 B ACTwriteComplete(@Writer, Obj) :-
acksNeeded(@S, Obj, Off, Len, Writer, RecvStamp, Count), Count == 0.
ack9 delete TBL needACK(@S, Obj, C, WriterId, RecvStamp, Need) :-
acksNeeded(@S, Obj, Off, Len, Writer, RecvStamp, Count), Count == 0.
/***********************************************************************/
// Lease Support:
// Server writes to lease object every (lease interval/2)
// Client subscribes for lease object.
/***********************************************************************/
cl1 ACT writeEvent(@S, Obj, Value) :-
periodic(@S, I, -1), I=leaseTime/2,
intervalObj="/volumelease", TBL serverId(@S,S).
cl2 ACT addInvalSub(@X, X, S, SS, CTP) :-
RCV serverConfig(@X, S), SS="/volumelease", CTP=="CP", X 6=S.
cl3 ACT addBodySub(@X, X, S, SS) :-
RCV serverConfig(@X, S), SS="/volumelease", X 6=S.
/***********************************************************************/
// Lease maintenance:
// At the end of every interval, for all expired leases,
// remove inval subscriptions, generate acks if needed,
// and remove from hasCallback table.
/***********************************************************************/
ll01 expiredLease(@S, C, Obj) :-
periodic(@S, LeastTime, -1), hasCallback(@S, Obj, C, ST),
TimeElapsed=f now()-ST, TimeElapsed < LeaseTime, TBL serverId(@S, S).
ll02 ACT removeInvalSub(@C, S, C, Obj) :-
expiredLease(@S, C, Obj).
ll03 ackServer(@S, C,Obj, Off, Len, Writer, NeedStamp) :-
TBL needAck(@S, Obj, Off, Len, C, Writer, NeedStamp, Need),
expiredLease(@S, C, Obj), Need= 0.
198

ll04 delete hasCallback(@S, Obj, C, ) :-
expiredLease(@S, C, Obj).
/***********************************************************************/
// Support for partial file writes:
// - for every local write, add to currentValid Table.
// - When an inval arrives, and if it satisfies a read miss,
// add to currentValid table,
// - If the inval does not correspond to read miss,
// update table accordingly and remove callback only when
// all block ranges for the object are invalid
/***********************************************************************/
pfw1 TBL currentValid(@C, Obj, Off, Len, State) :-
TRIG write(@C, Obj, Off, , ), State="Valid".
TBL serverId(@C, S), S 6=C.
pfw2 TBL currentValid(@C, Obj, Off, Len, State) :-
satsifiesReadMiss(@C, S, Obj, Off, Len, Writer, Stamp, Count),
Count==1, State="Valid".
pfw3 TBL currentValid(@C, Obj, Off, Len, NewState) :-
satsifiesReadMiss(@C, S, Obj, Off, Len, Writer, Stamp, Count),
TBL currentValid(@C, Obj, Off. Len, ), Count==0, NewState="Invalid".
pfw4 isAnythingElseValid(@C, Obj, a COUNT<*>) :-
satsifiesReadMiss(@C, S, Obj, Off, Len, Writer, Stamp, Count),
TBL currentValid(@C, Obj, Off2, Len2, State),
Count==0, State=="Valid", Off 6=Off2, Len 6=len2.
pfw5 ACT removeInvalSub(@C, S, C, Obj) :-
isAnythingElseValid(@C, Obj, Count), Count==0.
pfw6 delete TBL currentValid(@C, Obj, , , ) :-
isAnythingElseValid(@C, Obj, Count), Count==0.
/***********************************************************************/
// If server recieves a blind write,
// establishes a callback if there isn’t one.
/***********************************************************************/
bw1 blindWriteWithCallback(@S, C, Obj, a COUNT<*>) :-
TRIG invalArrives(@S, C, Obj, , , Writer, ),
TBL hasCallback(@S, Obj, C, ),
C== Writer, TBL serverId(@S, S),
bw2 TBL hasCallback(@S, Obj, C, T) :-
blindWriteWithCallback(@SS, C, Obj, Count),
Count==0, T=f now().
bw3 ACT addInvalSub(@S, S, C, Obj, CTP) :-
blindWriteWithCallback(@SS, C, Obj, Count), Count==0.
199

A.2.2 Blocking Policy
Blocking Point PredicateReadNowBlock isValid and isComplete and isSequenced and
maxStaleness(Server, 1, leaseInterval) (at Client)WriteAfterBlock B Action(writeComplete, objId) (at Client)ApplyUpdateBlock isValid (at Client & Server)
A.3 P-Coda
The implementation of P-Coda requires 37 routing rules and 7 blocking
conditions.
A.3.1 Routing Policy
/***********************************************************************/
// Initialization:
// Read server configuration and hoard list.
// Initialize server state to notConnected.
/***********************************************************************/
in1 ACT readEvent(@X, ObjId) :-
initialize(@X), ObjId = "/.serverCFG".
in2 TBL server(@X, S) :-
RCV serverConfig(@X, S).
ss1 TBL serverState(@X, State) :-
initialize(@X), State="notConnected".
/***********************************************************************/
// Client establishes subscriptions to
// server for transferring updates.
/***********************************************************************/
csSb1 ACT addInvalSub(@X, X, S, SS, CTP) :-
RCV serverConfig(@X, S), SS="/*", CTP=="LOG", X 6=S.
csSb2 ACT addBodySub(@X, X, S, SS) :-
RCV serverConfig(@X, S), SS="/*", X 6=S.
/***********************************************************************/
// If subscriptions are successful, update server state
// otherwise try again
/***********************************************************************/
ss2 connectedToServer(@X) :-
TRIG subStart(@X, X, S, , ).
ss3 TBL serverState(@X, State) :-
TRIG connectedToServer(@X), State="Connected".
200

csSb3 ACT addInvalSub(@X , X, S, SS, CTP) :-
TRIG subEnd(@X, X, S, SS, , Type), Type=="inval", CTP=="LOG".
csSb4 ACT addBodySub(@X, X, S, SS) :-
TRIG subEnd(@X, X, S, SS, , Type), Type=="body".
ss4 TBL serverState(@X, State) :-
TRIG subEnd(@X, X, S, SS, , Type), Type=="inval", State="notConnected".
/***********************************************************************/
// If a server is detected, establish a subscription for "empty"
// to get information about missing updates.
/***********************************************************************/
csSb6 ACT addInvalSub(@X,S , X, SS, CTP) :-
connectedToServer(@X), TBL serverId(@X, S), SS="EMPTY", CTP=="LOG".
/***********************************************************************/
// If not connected to server, simply inform blocking policy so that
// local writes and local read misses do not block.
/***********************************************************************/
li1 BACT writeComplete(@C, Obj) :-
TRIG write(@C, Obj, , , , ), TBL serverId(@C, S), C 6=S,
TBL serverState(@C, St), St=="notConnected".
li2 BACT writeComplete(@C, Obj) :-
TRIG operationBlock(@C, Obj, Off, Len, Bpoint, ),
Bpoint == "readAt", TBL serverId(@C, S), C 6=S,
TBL serverState(@C, St), St=="notConnected".
/***********************************************************************/
// On read miss, client store it in a table and informs server.
/***********************************************************************/
rm1 readMiss(@C, Obj, Off, Len) :-
TRIG operationBlock(@C, Obj, Off, Len, Bpoint, ),
Bpoint == "readAt", TBL serverId(@C, S), C 6=S.
TBL serverState(@C, State), State=="Connected".
rm2 TBL readMiss(@C, Obj, Off, Len) :-
readMiss(@C, Obj, Off, Len), TBL serverState(@C, State), State=="Connected".
rm3 clientRead(@S, C, Obj, Off, Len) :-
readMiss(@C, Obj, Off, Len), TBL serverState(@C, State), State=="Connected".
/***********************************************************************/
// On client read miss, server sends body and establishes callback
/***********************************************************************/
cb1 ACT sendBody(@S, S, C, Obj, Off, Len) :-
clientRead(@S, C, Obj, Off, Len).
cb2 ACT addInvalSub(@S, S, C, Obj, CTP) :-
clientRead(@S, C, Obj, Off, Len), CTP := "CP".
cb3 TBL hasCallback(@S, Obj, C) :-
clientRead(@S, C, Obj, Off, Len),
/***********************************************************************/
// When client receives an invalidation, if it does
// not satisfy a read miss, ack server and cancel callback.
// Otherwise, remove it from the table
/***********************************************************************/
201

rinv0 satsifiesReadMiss(@C, S, Obj, Off, Len, Writer, Stamp, a COUNT<*>) :-
TRIG InvalArrives(@C, S, Obj, Off, Len, Writer, Stamp),
TBL serverId(@C, S), S 6=C,
TBL readMiss(@C, S, Obj, Off, Len).
rinv1 ackServer(@S, C, Obj, Off, Len, Writer, Stamp) :-
satsifiesReadMiss(@C, S, Obj, Off, Len, Writer, Stamp, Count), Count==0,
rinv2 ACT removeInvalSub(@C, S, C, Obj) :-
satsifiesReadMiss(@C, S, Obj, Off, Len, Writer, Stamp, Count), Count==0,
rinv3 delete TBL readMiss(@C, S, Obj, Off, Len) :-
satsifiesReadMiss(@C, S, Obj, Off, Len, Writer, Stamp, Count), Count > 1.
/***********************************************************************/
// When server receives an invalidation,
// gather acks from others who have callbacks.
// Note:
// - Acks are accumulative so on received ack also
// acks all previous required acks.
// - needAck table keeps track of which acks are needed.
/***********************************************************************/
ack1 TBL needAck(@S, Obj, Off, Len, C2, Writer, Stamp, Need) :-
TRIG invalArrives(@S, C, Obj, Off, Len, Writer, Stamp),
TBL hasCallback(@S, Obj, C2), C2 6= Writer,
Need := 1, TBL serverId(@S, S).
ack2 TBL needAck(@S, Obj, Off, Len, C2, Writer, Stamp, Need) :-
TRIG invalArrives(@S, C, Obj, Off, Len, Stamp, Writer),
C2 == Writer, Need := 0, TBL serverId(@S, S).
ack3 TBL needAck(@S, Obj, Off, Len, C, Writer, NeedStamp, Need) :-
ackServer(@S, C, , , , , RecvStamp),
TB needAck(@S, Obj, Off, Len, C, Writer, NeedStamp, ),
NeedStamp < RecvStamp, Need:= 0, TBL serverId(@S, S).
ack4 TBL needAck(@S, Obj, C, Writer, NeedStamp, Need) :-
ackServer(@S, C, , , , RecvWriter, RecvStamp),
TBL needAck(@S, Obj, C, NeedWriter, NeedStamp, ),
NeedStamp == RecvStamp, NeedWriter <= RecvWriter,
Need:= 0, TBL serverId(@S, S).
ack5 delete TBL hasCallback(@S, Obj, C) :-
TBL needAck@S, Obj, , , C, , , Need)
Need = 0, TBL serverId(@S, S).
ack6 acksNeeded(@S, Obj, Off, Len, Writer, Recvtamp, a COUNT<*>) :-
TBL needAck(@S, Obj, Off, Len, C, Writer, RecvStamp, NeedTrig),
TBL needAck(@S, Obj, Off, Len, C, Writer, RecvStamp, NeedCount),
NeedTrig == 0, NeedCount == 1.
/***********************************************************************/
// If no more acks are needed, assign Sequence number,
// inform client, and clear out ack table
/***********************************************************************/
ack7 ACT assignSeq(@S,Obj, Off, Len, Stamp, Writer) :-
acksNeeded(@S, Obj, Off, Len, Writer, RecvStamp, Count), Count == 0.
ack8 BACT writeComplete(@Writer, Obj) :-
acksNeeded(@S, Obj, Off, Len, Writer, RecvStamp, Count), Count == 0.
202

ack9 delete TBL needACK(@S, Obj, C, WriterId, RecvStamp, Need) :-
acksNeeded(@S, Obj, Off, Len, Writer, RecvStamp, Count), Count == 0.
/***********************************************************************/
// Hoard when files when connected to the server,
// implement it like a read miss so server can establish call backs
/***********************************************************************/
hd1 ACT readEvent(@C, ObjId) :-
connectedToServer(@C), ObjId = "/.hoardList".
hd2 readMiss(@C, Obj, Off, Len) :-
RCV hoardItems(@C, Obj), Off=0, Len=-1.
/***********************************************************************/
// If server recieves a blind write,
// it establishes a callback if there isn’t one.
/***********************************************************************/
bw1 blindWriteWithCallback(@SS, C, Obj, a COUNT<*>) :-
TRIG invalArrives(@S, C, Obj, , , Writer, ),
TBL hasCallback(@S, Obj, C, ),
C== Writer, TBL serverId(@S, S),
bw2 TBL hasCallback(@S, Obj, C) :-
blindWriteWithCallback(@SS, C, Obj, Count), Count==0,
bw3 ACT addInvalSub(@S, S, C, Obj, CTP) :-
blindWriteWithCallback(@SS, C, Obj, Count), Count==0.
A.3.2 Blocking Policy
Blocking Point PredicateReadNowBlock isValid and isComplete and
(isSequenced or B ACT(isDisconnected))WriteAfterBlock B Action(writeComplete, objId) or
B ACT(isDisconnected)ApplyUpdateBlock isValid (at Client & Server)
A.3.3 Co-operative Caching
The following 8 rules were added to support co-operative caching./***********************************************************************/
// Liveness monitoring:
// - At initialization, read from neighbor config.
// - Periodically ping a neighbor.
// - Update neighbor table when ping event is received
// - Periodically, check which neighbors are dead
/***********************************************************************/
nin1 ACT readEvent(@X, ObjId) :-
initialize(@X), ObjId="/.neighborList".
203

nin2 TBL neighbor(@X, N, T, Live) :-
RCV neighborConfig(@X, N), T=f now(), Live=0.
png refresh(@N, X) :-
periodic(@X, 5, -1), TBL neighbor(@X, N, , ).
rPng TBL neighbor(@X, N, T, Live) :-
refresh(@X, N), T=f now(), Live=1.
chk TBL neighbor(@X, N, T, newLive) :-
periodic(@X, 20, -1), TBL neighbor(@X, N, T, Live),
Live==1, TimePassed=f now()-T, TimePassed>20, newLive=0.
/***********************************************************************/
// Co-operative Caching:
// On a read miss, ask all reachable peers for body.
// if server is not available, contact reachable peer
// and establish an inval subscription to get metada.
// Note: we remove the inval subs when it is caught up
// (i.e. we know the know about the status of peer)
/***********************************************************************/
cc1 ACT sendBody(@N, N, X, Obj, Off, Off) :-
readMiss(@C, Obj, Off, Len), TBL neighbor(@X, N, , Live), L==1.
cc2 ACT addInvalSub(@X, N, X, Obj, CTP) :-
readMiss(@C, Obj, Off, Len), TBL serverState(@C, State),
TBL neighbor(@X, N, , Live), L==1, State=="notConnected", CTP="CP.
cc3 ACT removeInvalSub(@C, N, C, Obj) :-
TRIG subCaughtup(@C, N, C, Obj), TBL serverId(@X, S), S 6=N.
A.4 P-TRIP
The implementation of P-TRIP requires 6 routing rules and 4 blocking
conditions.
A.4.1 Routing Policy
in1 ACT readEvent(@X, ObjId) :-
initialize(@X), ObjId = "/.serverCFG".
in2 TBL server(@X, S) :-
RCV serverConfig(@X, S).
/***********************************************************************/
// Client establishes subscriptions to get updates.
/***********************************************************************/
csSb1 ACT addInvalSub(@X, S, X, SS, CTP) :-
RCV serverConfig(@X, S), SS="/*", CTP=="LOG", X 6=S.
csSb2 ACT addBodySub(@X, P, X, SS) :-
RCV serverConfig(@X, S), SS="/*", X 6=S.
204

/***********************************************************************/
// Re-try in cases of failure
/***********************************************************************/
csSb3 ACT addInvalSub(@X, S, X, SS, CTP) :-
TRIG subEnd(@X, S, X, SS, , Type), Type=="inval", CTP=="LOG".
csSb4 ACT addBodySub(@X, S, X, SS) :-
TRIG subEnd(@X, S, X, SS, , Type), Type=="body".
A.4.2 Blocking Policy
Blocking Point PredicateReadNowBlock isValid and isCompleteApplyUpdateBlock isValid or maxStaleness(Server, 1, threshold)
A.4.3 Hierachical topology
We can easily change the topology from star to a static tree as follows.in1 ACT readEvent(@X, ObjId) :-
initialize(@X), ObjId = "/.parentCFG".
in2 TBL parent(@X, P) :-
RCV serverConfig(@X, X, P).
/***********************************************************************/
// Client establishes subscriptions to get updates.
/***********************************************************************/
csSb1 ACT addInvalSub(@X, P, X, SS, CTP) :-
RCV parentConfig(@X, P), SS="/*", CTP=="LOG", X 6=P.
csSb2 ACT addBodySub(@X, P, X, SS) :-
RCV parentConfig(@X, P), SS="/*", X 6=P.
/***********************************************************************/
// Re-try in cases of failure
/***********************************************************************/
csSb3 ACT addInvalSub(@X, P, X, SS, CTP) :-
TRIG subEnd(@X, P, X, SS, , Type), Type=="inval", CTP=="LOG".
csSb4 ACT addBodySub(@X, P, X, SS) :-
TRIG subEnd(@X, P, X, SS, , Type), Type=="body".
A.5 P-Bayou
The implementation of P-Bayou requires 10 routing rules and 3 blocking
conditions.
205

A.5.1 Routing Policy
/***********************************************************************/
// Periodically, pick a peer and set up subscriptions
// to get updates. Once caught up, remove subscriptions.
/***********************************************************************/
ae1 peerPicked(@X, a random<N>) :-
periodic(@X, Interval, -1), TBL neighbor(@X, N, , Live), Live==1.
ae2 ACT addInvalSub(@X, N, X, SS, CTP) :-
peerPicked(@X, N), SS="/*", CTP="LOG".
ae3 ACT addBodySub(@X, N, X, SS) :-
peerPicked(@X, N), SS="/*".
ae4 ACT removeInvalSub(@X, N, X, SS) :-
TRIG subCaughtup(@X,N,X,SS).
ae5 ACT removeBodySub(@X, N, X, SS) :-
TRIG subCaughtup(@X,N,X,SS).
/***********************************************************************/
// Liveness monitoring:
// - At initialization, read from neighbor config.
// - Periodically ping a neighbor.
// - Update neighbor table when ping event received.
// - Periodically, check which neighbors are dead.
/***********************************************************************/
nin1 ACT readEvent(@X, ObjId) :-
initialize(@X), ObjId="/.neighborList".
nin2 TBL neighbor(@X, N, T, Live) :-
RCV neighborConfig(@X, N), T=f now(), Live=0.
png refresh(@N, X) :-
periodic(@X, 5, -1), TBL neighbor(@X, N, , ).
rPng TBL neighbor(@X, N, T, Live) :-
refresh(@X, N), T=f now(), Live=1.
chk TBL neighbor(@X, N, T, newLive) :-
periodic(@X, 20, -1), TBL neighbor(@X, N, T, Live),
Live==1, TimePassed=f now()-T, TimePassed>20, newLive=0.
A.5.2 Blocking Policy
Blocking Point PredicateReadNowBlock isValid and isCompleteApplyUpdateBlock isValid
206

A.6 P-ChainReplication
The implementation of P-ChainReplication requires 45 routing rules
and 4 blocking conditions.
A.6.1 Routing Policy
/***********************************************************************/
// Initialization: read master info
// If I am master, read in volume to node mappings
/***********************************************************************/
ini1 ACT readEvent(@X, ObjId) :-
initialize(@X), ObjId = "/.masterCFG".
ini2 TBL master(@X, M) :-
RCV masterConfig(@X, M).
ini3 ACT readEvent(@M, ObjId) :-
RCV masterConfig(@X, M), ObjId="/.volList".
ini4 TBL volList(@M, Vol, N) :-
RCV volListConfig(@X, Vol, N).
/***********************************************************************/
// Keep head, tail, my successor, my predecessor information
// provided by the master in tables
/***********************************************************************/
s1 TBL head(@X, Vol, H) :-
currHead(@X, Vol, H).
s2 TBL tail(@X, Vol, H) :-
currTail(@X, Vol, H).
s3 TBL predecessor@X, Vol, P) :-
currPredecessor(@X, Vol, P).
/***********************************************************************/
// Establish subscriptions to predecessors to receive updates
/***********************************************************************/
sub1 ACT addInvalSub(@X, P, X , Vol, CTP) :-
predecessor(@X, Vol, P), CTP=="LOG".
sub2 ACT addBodySub(@X, P, X , Vol) :-
predecessor(@X, Vol, P).
/***********************************************************************/
// Inform master when the subscription is caught up.
// i.e. if X is a new node, it can be used as a tail now
/***********************************************************************/
sub4 connEstablished(@M, X, Vol) :-
TRIG subCaughtup(@X,P, X, Vol), TBL master(@X, M).
207

/***********************************************************************/
// For consistency, every node keeps track of the latest
// received write.
/***********************************************************************/
con1 rcvdWrite(@X, Vol, Writer, Stamp) :-
TRIG invalArrives(@X, S, Obj, , , Writer, Stamp), Vol=f getVol(Obj),
con2 TBL LatestRcvdWrite(@X, Vol, NWriter, NStamp) :-
rcvdWrite(@X, Vol, NWriter, NStamp),
TBL LatestRcvdWrite(@X, Vol, Writer, Stamp), Stamp < NStamp.
con3 TBL LatestRcvdWrite(@X, Vol, NWriter, NStamp) :-
rcvdWrite(@X, Vol, NWriter, NStamp),
TBL LatestRcvdWrite(@X, Vol, Writer, Stamp), Stamp == NStamp, Stamp < NStamp.
/***********************************************************************/
// If I am the tail or I become the new tail, send an ACK to the head
/***********************************************************************/
con4 BACT ackFromTail(@H, Vol, Writer, Stamp) :-
rcvdWrite(@X, Vol, Writer, Stamp).
TBL head(@X, Vol, H), TBL tail(@X, Vol, T), X==T.
con5 BACT ackFromTail(@H, Vol, Writer, Stamp) :-
currTail(@X, Vol, T), X==T,
TBL LatestRcvdWrite(@X, Vol, Writer, Stamp).
/***********************************************************************/
// If there is a new head and I am the tail, send an ACK to the head
/***********************************************************************/
con6 BACT ackFromTail(@H, Vol, Writer, Stamp) :-
currHead(@X, Vol, H), TBL tail(@X, Vol, T), X==T,
TBL LatestRcvdWrite(@X, Vol, Writer, Stamp).
/***********************************************************************/
// When master detects a new node, it looks up
// what volume chain to add it to.
/***********************************************************************/
nn1 nn1 newVolMember(@M,Vol, N) :- newNeighbor(@M, N), volList(@M,Vol, N). :-
/***********************************************************************/
// If volume chain has not been set up, set the
// new node to head and tail and let it know.
/***********************************************************************/
nn2 currChainCount(@M, Vol, N, a COUNT<*>) :-
newVolMember(@M, Vol, N), TBL chain(@M, Vol, , ).
nn3 newHead(@N,Vol, N) :-
currChainCount(@M, Vol, N, C), C==0.
nn4 newTail(@N,Vol, N) :-
currChainCount(@X, Vol, N, C), C==0.
nn5 TBL chain(@M, Vol, N) :-
currChainCount(@X, Vol, N, C), C==0.
/***********************************************************************/
// When you have a new head or new tail,
// update tables and inform others.
/***********************************************************************/
208

nn6 currHead(@N, Vol, H) :-
newHead(@M, Vol, H), TBL chain(@M, Vol, N, ).
nn7 TBL head(@M, Vol, H) :-
newTail(@M, Vol, H).
nn8 currTail(@N, Vol, T) :-
newTail(@M, Vol, T), TBL chain(@M, Vol, N, ).
nn9 TBL tail(@M, Vol, T) :-
newTail(@M, Vol, T).
/***********************************************************************/
// If volume chain exists, send new node head and
// predecessor info and add it to the end of the chain
/***********************************************************************/
nn10 currHead(@N, Vol, H) :-
currChainCount(@M, Vol, N, C), C 6=0, TBL head(@M, Vol, H).
nn11 currMaxChainPos(@M, Vol, N, a MAX<Pos>) :-
currChainCount(@M, Vol, N, C), C 6=0, TBL chain(@M, Vol, , Pos).
nn12 currPredecessor(@N,Vol, Pred) :-
currMaxChainPos(@M, Vol, N, PredPos), TBL chain(@M, Vol, Pred, PredPos).
nn13 TBL chain(@M, Vol, N, Pos) :-
currMaxChainPos(@M, Vol, N, PredPos), Pos = PredPos + 1.
/***********************************************************************/
// When a node has caught up, if it is at the
// last position in the volume chain, set it as tail.
/***********************************************************************/
nn14 currTailPos(@M, Vol, N, NPos, a MAX<Pos>) :-
connEstablished(@M, Vol, N), TBL chain(@M, Vol, N, NPos),
TBL chain(@M, Vol, , Pos).
nn15 newTail(@M, Vol, T) :-
currTailPos(@M, Vol, N, NPos, MaxPos), NPos==MaxPos.
/***********************************************************************/
// Dead node: delete it from chain
/***********************************************************************/
dn1 delete TBL chain(@M, Vol, N, NPos) :-
deadNeighbor(@M, N), TBL chain(@M, Vol, N, NPos).
/***********************************************************************/
// find predecessor if dead node is not head
/***********************************************************************/
dn2 findPredecessor(@M, N, Vol, NPos, a MAX<PPos>) :-
deadNeighbor(@M, N), TBL chain(@M, Vol, N, NPos),
TBL chain(@M, Vol, , PPos), PPos < Pos,
TBL head(@M, Vol, H), H6=N.
/***********************************************************************/
// If dead node is the current tail, set
// the predecessor as new tail.
/***********************************************************************/
209

dn3 newTail(@M, Vol, Pred) :-
findPredecessor(@M, N, Vol,NPos, PPos), TBL tail(@M, Vol, T),
T==N, TBL chain(@M, Vol, Pred, PPos).
/***********************************************************************/
// Otherwise, find successor and inform it of its
// new predecessor.
/***********************************************************************/
dn4 findSuccessor(@M, N, Vol, NPos, PPos, a MIN<SPos>) :-
findPredecessor(@M, N, Vol, NPos, PPos), TBL tail(@M, Vol, T),
T 6=N, TBL chain(@M, Vol, , SPos), SPos > NPos.
dn5 currPredecessor(@Suc, Pred) :-
findSuccessor(@M, N, Vol, NPos, PPos, SPos), TBL chain(@M, Vol, Succ, SPos),
TBL chain(@M, Vol, Succ, PPos),
/***********************************************************************/
// if dead node is current head,
// find successor and set it to new head.
/***********************************************************************/
dn6 findNewHead(@M, N, Vol, NPos, a MIN<PPos>) :-
deadNeighbor(@M, N), TBL chain(@M, Vol, N, NPos),
TBL chain(@M, Vol, , SPos), SPos > Pos,
TBL head(@M, Vol, H), H==N.
dn7 newHead(@M, Vol, H) :-
findNewHead(@M, N, Vol, NPos, HPos), TBL chain(@M, Vol, H, HPos).
/***********************************************************************/
// Liveness monitoring:
// - At initialization, read from neighbor config.
// - Periodically ping a neighbor.
// - when a ping event is received,
// check if it is a new neighbor and
// udpate the neighbor table
// - Periodically, check which neighbors are dead
/***********************************************************************/
nin1 ACT readEvent(@X, ObjId) :-
initialize(@X), ObjId="/.neighborList".
nin2 TBL neighbor(@X, N, T, Live) :-
RCV neighborConfig(@X, N), T=f now(), Live=0.
png refresh(@N, X) :-
periodic(@X, 5, -1), TBL neighbor(@X, N, , ).
rPng1 newNeighbor(@X, N) :-
refresh(@X, N), TBL neighbor(@X, N, , Live), Live==0.
rPng2 TBL neighbor(@X, N, T, Live) :-
refresh(@X, N), T=f now(), Live=1.
chk1 deadNeighbor(@X, N) :-
periodic(@X, 20, -1), TBL neighbor(@X, N, T, Live),
Live==1, TimePassed=f now()-T, TimePassed>20.
chk2 TBL neighbor(@X, N, T, Live) :-
deadNeighbor(@X, N), TBL neighbor(@X, N, T, ), Live=0.
210

A.6.2 Blocking Policy
Blocking Point PredicateReadNowBlock isValid and isCompleteWriteAfterBlock B Action(ackFromTail, writer, Stamp)ApplyUpdateBlock isValid
A.7 P-TierStore
The implementation of P-TierStore requires 14 routing rules and 1
blocking conditions.
A.7.1 Routing Policy
/***********************************************************************/
// Initialization: Read parent id.
/***********************************************************************/
in0 TRIG readEvent(@X, ObjId) :-
EVT initialize(@X), ObjId := "/.parent".
/***********************************************************************/
// When node X receives its own parent id, store it in
// a table and read subscription list.
/***********************************************************************/
pp0 TBL parent(@X, P) :-
RCV parent(@X, P).
pp1 TRIG readAndWatchEvent(@X, ObjId) :-
RCV initialize(@X), ObjId := "/.subList".
/***********************************************************************/
// When node X receives a subscription event for
// one of its subscriptions, store it in a
// subscription table and establish an inval
// and body subscription from the parent.
/***********************************************************************/
pSb0 TBL subscription(@X, SS) :-
RCV subscription(@X, SS).
pSb1 ACT addInvalSub(@X, P, X, SS, CTP) :-
RCV subscription(@X, SS), TBL parent(@X, P),
CTP=="LOG".
pSb2 ACT addBodySub(@X, P, X, SS) :-
RCV subscription(@X, SS), TBL parent(@X, P).
/***********************************************************************/
// If parent subscription fails, retry.
/***********************************************************************/
211

f1 ACT addInvalSub(@X, P, X, SS, CTP) :-
TRIG subEnd(@X, P, X, SS, , Type),
TBL parent(@X, P), Type=="Inval", CTP:="LOG".
f2 ACT addBodySub(@X, P, X, SS) :-
TRIG subEnd(@X, P, X, SS, , Type),
TBL parent(@X, P), TYPE=="Body", CTP:="LOG".
/***********************************************************************/
// If a child contacts me, establish subscriptions
// for "/*’’ to receive updates.
/***********************************************************************/
cSb1 ACT addInvalSub(@X, C, X, SS, CTP) :-
TRIG subStart(@X, X, C, , Type), C 6= P,
Type == "Inval", SS := "/*", CTP := "LOG".
cSb2 ACT addBodySub(@X, C, X, SS, CTP) :-
TRIG subStart(@X, X, C, , Type), C 6= P,
Type == "Body", SS := "/*".
/***********************************************************************/
// DTN Support: if a relay node arrives,
// establish subscriptions to receive updates
// and to send local receive new updates.
/***********************************************************************/
dtn1 ACT addInvalSub(@X, R, X, SS, CTP) :-
EVT relayNodeArrives(@X, R),
TBL subscription(@X, SS), CTP=="LOG".
dtn2 ACT addBodySub(@X, R, X, SS) :-
EVT relayNodeArrives(@X, R),
TBL subscription(@X, SS), CTP=="LOG".
dtn3 ACT addInvalSub(@X, X, R, SS, CTP) :-
EVT relayNodeArrives(@X, R), SS:="/*", CTP=="LOG".
dtn4 ACT addBodySub(@X, X, R, SS) :-
EVT relayNodeArrives(@X, R), SS:="/*", CTP=="LOG".
A.7.2 Blocking Policy
Blocking Point PredicateApplyUpdateBlock isValid
A.8 P-Pangaea
The implementation of P-Pangaea requires 59 routing rules and 1 block-
ing predicate.
212

A.8.1 Routing Policy
/***********************************************************************/
// Assumptions:
// - the FileEntries table stores the gold nodes for every file entry for
// a directory as tuples FileEntries(@X, dir, child, GoldNode).
// - Every node has a Peer table to store links to gold and bronze replicas.
// - Every server has a latency table that stores all pairs RTT information.
/***********************************************************************/
/***********************************************************************/
// Initalization: Read in file entries of root directory
/***********************************************************************/
ini01 ACT readAndWatchEvent(@S, ObjMeta) :-
initalize(@S), ObjMeta="/.meta".
/***********************************************************************/
// When you receive new gold node information, add it to file entry table.
/***********************************************************************/
fe01 TBL fileEntry(@S, Dir, Obj, G1) :-
RCV fileEntryConfig(@S, Dir, Obj, G1, G2, G3).
fe02 TBL fileEntry(@S, Dir, Obj, G2) :-
RCV fileEntryConfig(@S, Dir, Obj, G1, G2, G3).
fe03 TBL fileEntry(@S, Dir, Obj, G3) :-
RCV fileEntryConfig(@S, Dir, Obj, G1, G2, G3).
/***********************************************************************/
// Initialization: Read latency information
/***********************************************************************/
ini02 ACT read(@S, Obj) :-
intialize(@S), Obj = "/.latencyConfig".
ini03 TBL latency(@S, X, Y, Lat) :-
RCV latencyConfig(@S, X, Y, Lat).
/***********************************************************************/
// On a read miss, find parentdir of the object
// and add to outstanding read miss table
/***********************************************************************/
rm1 readMiss(@S, Obj) :-
TRIG operationBlock(@S, ObjData, Off, Len, Bpoint, ),
Bpoint == "readAt", Obj=f getObjFromData(ObjData).
rm2 missParentChild(@S, Parent, Child) :-
readMiss(@S, Child), f getParent(Child).
rm3 TBL outstandingMiss(@S, Parent, Child) :-
missParentChild(@S, Parent, Child).
/***********************************************************************/
// Check FileEntries table:
// if no parent entry found, issue read miss for parent
// if parent entries exist but no obj entry, new file needs to be created
// if obj entry found, pick Gold Node, establish connections to it
// and ask it to pick peers.
/***********************************************************************/
213

rm4 findParentEntries(@S, Parent, Child, a count<*>) :-
missParentChild(@S, Parent, Child), TBL fileEntries(@S, Parent, , ),
rm5 readMiss(@S, Parent) :-
findParentEntries(@S, Parent,Child, Count), Count==0.
rm6 findObjEntries(@S, Parent, Child, a count<*>) :-
findParentEntries(@S, Parent,Child, Count), Count>0,
TBL fileEntries(@S, Parent, Child, ).
rm7 createNewObj(@S, Parent, Child) :-
findObjEntries(@S, Parent, Child, Count), Count==0.
rm8 pickGoldNode(@S, Child, a RANDOM<GNode>) :-
findObjEntries(@S, Parent, Child, Count), Count 6=0.
TBL FileEntries(@S, Dir, File, GNode).
rm9 needReplica(@GNode, S, Child) :-
pickGoldNode(@S, Child, GNode).
rm10 establishConnections(@S, GNode, Child) :-
pickGoldNode(@S, Child, GNode).
/***********************************************************************/
// When a gold node recieves a needReplica message,
// it picks 2 peers from peer list for S to contact.
/***********************************************************************/
rm11 pickClosestPeer(@G, S, Obj, a MIN<Lat>) :-
needReplica(@G, S, Obj), TBL peer(@G, Obj, P),
TBL neighbor(@G, P, , Live), Live == 1,
TBL latency(@G, S, P, Lat).
rm12 pickRandomPeer(@G, S, Obj, CP, a RANDOM<RP>) :-
pickClosestPeer(@G, S, Obj, MinLat),
TBL latency(@G, S, CP, MinLat), TBL peer(@G, Obj, RP),
TBL neighbor(@G, RP, , Live), CP 6=RP, Live==1.
/***********************************************************************/
// Once peers are picked, ask S to establish connections
/***********************************************************************/
rm13 establishConnections(@S, Obj, CP) :-
pickRandomPeer(@G, S, Obj, CP, RP).
rm14 establishConnections(@S, Obj, RP) :-
pickRandomPeer(@G, S, Obj, CP, RP).
/***********************************************************************/
// Establish connections by setting up bi-directional
// body and inval connections for both data and meta data
/***********************************************************************/
con1 TRIG addInvalSub(@S, P, S, SS, CTP) :-
establishConnections(@S, Obj, P), SS=Obj+"/*",
CTP="CP".
con2 TRIG addInvalSub(@S, S, P, SS, CTP) :-
establishConnections(@S, Obj, P), SS=Obj+"/*",
CTP="CP".
con3 TRIG addBodySub(@S, P, S, SS) :-
establishConnections(@S, Obj, P), SS=Obj+"/*".
214

con4 TRIG addBodySub(@S, S, P, SS) :-
establishConnections(@S, Obj, P), SS=Obj+"/*".
/***********************************************************************/
// When an inval connection catches up, add to peer table.
// If there is an outstanding miss for object,
// readAndWatch meta data and remove from outstanding miss table.
/***********************************************************************/
con5 TBL peer(@S, Obj, P) :-
ACT subCaughtup(@S, P, S, SS), Obj=f getObj(SS).
con6 receivedObj(@S, Obj) :-
ACT subCaughtup(@S, P, S, SS), Obj=f getObj(SS).
con7 TRIG readAndWatchEvent(@S, Meta) :-
receivedObj(@S, Obj), TBL outstandingMiss(@S, , Obj), Meta=Obj+"/.meta".
con8 delete TBL outstandingMiss(@S, Parent, Obj) :-
receivedObj(@S, Obj), TBL outstandingMiss(@S, Parent, Obj).
/***********************************************************************/
// As we get new meta-data, check if there is an outstanding
// miss for the child. If so, reissue miss.
// Note: we use a retryMiss table to ensure that we issue the miss
// after the new file entries have been added to the table.
/***********************************************************************/
ret1 TBL retryMiss(@S, Dir, Obj) :-
RCV fileEntryConfig(@S, Dir, Obj, G1, G2, G3),
TBL outstandingMiss(@S, Dir, Obj).
ret2 missParentChild(@S, Dir, Obj) :-
TBL retryMiss(@S, Dir, Obj).
/***********************************************************************/
// if we have received all entries from parent of an outstanding
// miss, need to create the object
/***********************************************************************/
ret3 createNewObj(@S, Dir, Child) :-
RCV EndFileEvent(@S, ObjMeta), Dir = f getObj(ObjMeta),
TBL outstandingMiss(@S, Dir, Child).
/***********************************************************************/
// File Creation:
// find new gold nodes, establish connections.
// Then update directory object.
/***********************************************************************/
fc1 pickFirstPeerGold(@S, Dir, Obj, a RANDOM<P>) :-
createNewObj(@S, Dir, Obj) TBL neighbor(@S, P, , Live), Live==1.
fc2 pickSecondPeerGold(@S, Dir, Obj, G1, a RANDOM<P>) :-
pickFirstPeerGold(@S, Dir, Obj, G1), TBL neighbor(@, P, , Live),
G1 6=P, Live==1.
fc3 establishConnections(@S, Obj, G1) :-
pickSecondPeerGold(@S, Dir, Obj, G1, G2).
fc4 establishConnections(@S, Obj, G2) :-
pickSecondPeerGold(@S, Dir, Obj, G1, G2).
215

fc5 ACT WriteEvent((@S, ObjMeta, EName, Dir, Obj, S, G1, G2) :-
pickSecondPeerGold(@S, Dir, Obj, G1, G2), ObjMeta =Obj+"/.meta",
EName = "fileEntryConfig".
/***********************************************************************/
// Temporary Failures:
// retry connections when they become live
/***********************************************************************/
tf1 establishConnection(@S, Obj, P) :-
liveNeighbor(@S, P), TBL peer(@S, Obj, P).
/***********************************************************************/
// Permanent Failures:
// check how long a node has been dead.
// if deadPeer, ask a gold node to pick a new peer
/***********************************************************************/
pf1 deadNode(@S, Obj, P) :-
periodic(@S, 60*60, -1), TBL neighbors(@S, P, T, Live),
T > f now() - 60*60, Live==0, TBL peer(@S, Obj, P).
pf2 delete TBL peer(@S, Obj, P) :-
deadNode(@S, Obj, P).
pf3 isNodeGold(@S, Obj, P, a COUNT<*>) :-
deadNode(@S, Obj, P), TBL fileEntry(@S, Obj, G), G==P.
pf4 deadPeer(@S, Obj, P) :-
isNodeGold(@S, Obj, P, C), C==0.
pf5 deadGoldPeer(@S, Obj, P) :-
isPeerGold(@S, Obj, P, C), C>0.
pf6 pickGoldForRecovery(@S, Obj, a random<G>) :-
deadPeer(@S, Obj, P), TBL fileEntry(@S, Obj, G).
pf7 needNewPeer(@G, Obj, S) :-
pickGoldForRecovery(@S, Obj, G).
/***********************************************************************/
// Gold node picks a peer and sends it over
/***********************************************************************/
pf8 needPeer(@S, G, Obj, NP) :-
needNewPeer(@G, Obj, S), TBL peer(@G, Obj, NP),
TBL neighbor(@G, NP, , Live), Live==1.
/***********************************************************************/
// When receive new peer, check if it is already a peer.
// if not, establish connections.
// if so, ask gold node for another peer.
/***********************************************************************/
pf9 checkIfExistingPeer(@S, G, Obj, NP, a COUNT<*>) :-
newPeer(@S, G, Obj,NP), TBL peer(@S, Obj, P), NP==P.
pf10 establishConnections(@S, Obj, NP) :-
checkIfExistingPeer(@S, G, Obj,NP, C), C==0.
pf11 needNewPeer(@G, S, Obj) :-
checkIfExistingPeer(@S,G, Obj,NP, C), C>0.
216

/***********************************************************************/
// Permanent Failures:
// if dead gold node, pick a random peer to upgrade
// to gold and update object meta data
/***********************************************************************/
pf12 pickNewGold(@G, Obj, OP, a RANDOM<NP>) :-
deadGoldPeer(@G, Obj, OP), TBL peer(@G, Obj, NP),
OP 6= NP, TBL neighbor(@G, NP, , Live), Live==1.
pf13 findOtherGold(@G, Dir, Obj,OP, LG, NP) :-
pickNewGold(@G, Obj, OP, NP), TBL FileEntry(@G,Dir,Obj, LG),
LG 6=G, LG 6=OP.
pf14 ACT WriteEvent((@G, ObjMeta, EName, Dir, Obj, S, G1, G2) :-
findOtherGold(@G, Dir, Obj, OP, G1, G2), ObjMeta =Obj+"/.meta",
EName = "fileEntryConfig".
pf16 establishConnections(@NP, Obj, LG) :-
findOtherGold(@G, , Obj, , LG, NP).
/***********************************************************************/
// Liveness monitoring:
// - At initialization, read from neighbor config.
// - Periodically ping a neighbor.
// - when a ping event is received,
// check if it is a new neighbor and
// udpate the neighbor table
// - Periodically, check which neighbors are dead
/***********************************************************************/
nin1 ACT readEvent(@X, ObjId) :-
initialize(@X), ObjId="/.neighborList".
nin2 TBL neighbor(@X, N, T, Live) :-
RCV neighborConfig(@X, N), T=f now(), Live=0.
png refresh(@N, X) :-
periodic(@X, 5, -1), TBL neighbor(@X, N, , ).
rPng1 liveNeighbor(@X, N) :-
refresh(@X, N), TBL neighbor(@X, N, , Live), Live==0.
rPng2 TBL neighbor(@X, N, T, Live) :-
refresh(@X, N), T=f now(), Live=1.
chk1 deadNeighbor(@X, N) :-
periodic(@X, 20, -1), TBL neighbor(@X, N, T, Live),
Live==1, TimePassed=f now()-T, TimePassed>20.
chk2 TBL neighbor(@X, N, T, Live) :-
deadNeighbor(@X, N), TBL neighbor(@X, N, T, ), Live=0.
A.8.2 Blocking Policy
Blocking Point PredicateApplyUpdateBlock isValid
217

Bibliography
[1] http://www.w3.org/html/.
[2] Spin formal verification. http://spinroot.com/spin/whatispin.html.
[3] Sql. http://en.wikipedia.org/wiki/SQL.
[4] Proceedings of the Summer 1994 USENIX Conference, June 1994.
[5] Proceedings of the 15th ACM Symposium on Operating Systems Princi-
ples, December 1995.
[6] Proceedings of the 18th ACM Symposium on Operating Systems Princi-
ples, October 2001.
[7] Proceedings of the 5th ACM Symposium on Operating Systems Design and
Implementation, December 2002.
[8] Proceedings of the 6th ACM Symposium on Operating Systems Design and
Implementation, December 2004.
[9] Proceedings of the 3rd USENIX Symposium on Networked Systems Design
and Implementation, May 2006.
[10] Proceedings of the 6th USENIX Symposium on Networked Systems Design
and Implementation, April 2009.
218

[11] S. Adve and K. Gharachorloo. Shared memory consistency models: A
tutorial. IEEE Computer, pages 66–76, December 1996.
[12] A. Adya, W. Bolosky, M. Castro, G. Cermak, R. Chaiken, J. Douceur,
J. Howell, J. Lorch, M. Theimer, and R. Wattenhofer. Farsite: Federated,
available, and reliable storage for an incompletely trusted environment.
In Proceedings of the 5th ACM Symposium on Operating Systems Design
and Implementation [7].
[13] M. Ahamad, P. Hutto, and R. John. Implementing and programming
causal distributed shared memory. In Proceedings of the International
Conference on Distributed Computing Systems, May 1991.
[14] T. Anderson, M. Dahlin, J. Neefe, D. Patterson, D. Roselli, and R. Wang.
Serverless Network File Systems. ACM Transactions on Computer Sys-
tems, 14(1):41–79, February 1996.
[15] N. Belaramani and M. Dahlin. Achieving energy efficiency while syn-
chronizing personal data. Technical Report TR-09-21, The University of
Texas at Austin, August 2009.
[16] N. Belaramani, M. Dahlin, L. Gao, A. Nayate, A. Venkataramani, P. Yala-
gandula, and J. Zheng. PRACTI replication. In Proceedings of the 3rd
USENIX Symposium on Networked Systems Design and Implementation
[9].
219

[17] M. Blaze and R. Alonso. Dynamic Hierarchical Caching in Large-Scale
Distributed File Systems. In Proceedings of the 12th International Con-
ference on Distributed Computing Systems, June 1992.
[18] S. Chandra, M. Dahlin, B. Richards, R. Wang, T. Anderson, and J. Larus.
Experience with a Language for Writing Coherence Protocols. In Pro-
ceedings of USENIX Conference on Domain-Specific Languages, October
1997.
[19] W. Chen and X. Liu. Enforcing routing consistency in structured peer-
to-peer overlays: Should we and could we? In Proceedings of the 5th
International workshop on Peer-to-Peer Systems, February 2006.
[20] L. Cox and B. Noble. Fast reconciliations in fluid replication. In Pro-
ceedings of the 21st International Conference on Distributed Computing
Systems, April 2001.
[21] F. Dabek, M. F. Kaashoek, D. Karger, R. Morris, and I. Stoica. Wide-
area cooperative storage with CFS. In Proceedings of the 18th ACM
Symposium on Operating Systems Principles [6].
[22] M. Dahlin, L. Gao, A. Nayate, A. Venkataramani, P. Yalagandula, and
J. Zheng. PRACTI replication for large-scale systems. Technical Report
TR-04-28, University of Texas at Austin, March 2004.
[23] M. Dahlin, R. Wang, T. Anderson, and D. Patterson. Cooperative
Caching: Using Remote Client Memory to Improve File System Per-
220

formance. In Proceedings of the First ACM Symposium on Operating
Systems Design and Implementation, pages 267–280, November 1994.
[24] D. Dao, J. Albrecht, C. Killian, and A. Vahdat. Live debugging of
distributed systems. In Proceedings of the 18th International Conference
on Compiler Construction, March 2009.
[25] G. Decandia, D. Hastorun, M. Jampani, G. Kakulapati, A. Lakshman,
A. Pilchin, S. Sivasubramanian, P. Vosshall, and W. Vogels. Dynamo:
Amazon’s highly available key-value store. In Proceedings of the 21st
ACM Symposium on Operating Systems Principles, October 2007.
[26] M. Demmer, B. Du, and E. Brewer. Tierstore: A distributed file-system
for challenged networks. In Proceedings of the 6th USENIX Conference
on File and Storage Technologies, February 2008.
[27] D. L. Dill. Ther murphi verification system. In 8th International Con-
ference on Computer Aided Verification, 1996.
[28] M. Feeley, W. Morgan, F. Pighin, A. Karlin, H. Levy, and C. Thekkath.
Implementing Global Memory Management in a Workstation Cluster. In
Proceedings of the 15th ACM Symposium on Operating Systems Principles
[5], pages 201–212.
[29] S. Ghemawat, H. Gobioff, and S. Leung. The Google file system. In Pro-
ceedings of the 19th ACM Symposium on Operating Systems Principles,
December 2003.
221

[30] S. Gilbert and N. Lynch. Brewer’s conjecture and the feasibility of Con-
sistent, Available, Partition-tolerant web services. In ACM SIGACT
News, 2002.
[31] R. Golding. A weak-consistency architecture for distributed information
services. Computing Systems, 5(4):379–405, 1992.
[32] C. Gray and D. Cheriton. Leases: An Efficient Fault-Tolerant Mechanism
for Distributed File Cache Consistency. In Proceedings of the 12th ACM
Symposium on Operating Systems Principles, pages 202–210, 1989.
[33] J. Gray, P.Helland, P. E. O’Neil, and D. Shasha. Dangers of replication
and a solution. In Proceedings of SIGMOD International Conference on
Management of Data, pages 173–182, 1996.
[34] Robert Grimm. Better extensibility through modular syntax. In Pro-
ceedings of SIGPLAN Conference on Programming Language Design and
Implementation, pages 38–51, June 2006.
[35] H. S. Gunawi, A. Rajimwale, A. C. Arpaci-Dusseau, and R. H. Arpaci-
Dusseau. Proceedings of the 8th acm symposium on operating systems
design and implementation. In Proceedings of the 8th ACM Symposium
on Operating Systems Design and Implementation, December 2008.
[36] R. Guy, J. Heidemann, W. Mak, T. Page, Gerald J. Popek, and D. Roth-
meier. Implementation of the Ficus Replicated File System. In Proceed-
ings of the Summer 1990 USENIX Conference, June 1990.
222

[37] R. Guy, P. Reiher, D. Ratner, M. Gunter, and W. Ma. Rumor: Mobile
data access through optimistic peer-to-peer replication. In Workshop on
Mobile Data Access, pages 254–265, 1998.
[38] J. Hartman and J. Ousterhout. The Zebra Striped Network File Sys-
tem. In Proceedings of the 14th ACM Symposium on Operating Systems
Principles, pages 29–43, December 1993.
[39] J. Heidemann and G. Popek. File-system development with stackable
layers. ACM Transactions on Computer Systems, 12(1):58–89, February
1994.
[40] M. Herlihy and J. Wing. Linearizability: A correctness condition for
concurrent objects. ACM Transactions on Programming Languages and
Systems Prog. Lang. Sys., 12(3), 1990.
[41] Martin Hirzel and Robert Grimm. Jeannie: Granting Java native inter-
face developers their wishes. In The International Conference on Object
Oriented Programming, Systems, Languages and Applications, October
2007.
[42] J. Howard, M. Kazar, S. Menees, D. Nichols, M. Satyanarayanan, R. Side-
botham, and M. West. Scale and Performance in a Distributed File Sys-
tem. ACM Transactions on Computer Systems, 6(1):51–81, February
1988.
223

[43] H. Hu and A. Vahdat. Building replicated internet services using TACT:
A toolkit for tunable availability and consistency tradeoffs. In Proceedings
of 2nd International Workshop on Advance Issues of E-Commerce and
Web-Based Information Systems, 2000.
[44] D. S. Parker (Jr.), G. J. Popek, G. Rudisin, A. Stoughton, B. J. Walker,
E. Walton, J. M. Chow, S. Kiser, D. Edwards, and C. Kline. Detection
of Mutual Inconsistency in Distributed Systems. IEEE Transactions on
Software Engineering, SE-9(3):240–247, May 1983.
[45] B. Kang, R. Wilensky, and J. Kubiatowicz. Hash history approach for
reconciling mutual inconsistency in optimistic replication. In Proceedings
of the 23rd International Conference on Distributed Computing Systems,
May 2003.
[46] A. Karypidis and S. Lalis. Omnistore: A system for ubiquitous per-
sonal storage management. In Annual IEEE International Conference
on Pervasive Computing and Communications, pages 136–147, 2006.
[47] A. Kermarrec, A. Rowstron, M. Shapiro, and P. Druschel. The IceCube
aproach to the reconciliation of divergent replicas. In Proceedings of the
20th Symposium on the Principles of Distributed Computing, 2001.
[48] Charles Killian, James W. Anderson, Ryan Braud, Ranjit Jhala, and
Amin Vahdat. Mace: Language support for building distributed systems.
In Proceedings of the ACM SIGPLAN 2007 Conference on Programming
Language Design and Implementation, June 2007.
224

[49] J. Kistler and M. Satyanarayanan. Disconnected operation in the coda
file system. ACM Transactions on Computer Systems, 10(1):3–25, Febru-
ary 1992.
[50] J. Kubiatowicz, D. Bindel, Y. Chen, S. Czerwinski, P. Eaton, D. Geels,
R. Gummadi, S. Rhea, H. Weatherspoon, W. Weimer, C. Wells, and
B. Zhao. Oceanstore: An architecture for global-scale persistent stor-
age. In Proceedings of the 9th International Conference on Architectural
Support for Programming Languages and Operating Systems (ASPLOS
2000), November 2000.
[51] R. Ladin, B. Liskov, L. Shrira, and S. Ghemawat. Providing high avail-
ability using lazy replication. ACM Transactions on Computer Systems,
10(4):360–391, 1992.
[52] L. Lamport. Time, clocks, and the ordering of events in a distributed
system. Communications of the ACM, 21(7), July 1978.
[53] L. Lamport. How to make a multiprocessor computer that correctly
executes multiprocess programs. IEEE Transactions on Computers, C-
28(9):690–691, September 1979.
[54] L. Lamport. Part time parliament. ACM Transactions on Computer
Systems, 16(2), May 1998.
[55] R. Lipton and J. Sandberg. PRAM: A scalable shared memory. Techni-
cal Report CS-TR-180-88, Princeton, 1988.
225

[56] B. Loo, T. Condie, J. Hellerstein, P. Maniatis, T. Roscoe, and I. Sto-
ica. Implementing declarative overlays. In Proceedings of the 20th ACM
Symposium on Operating Systems Principles, October 2005.
[57] P. Mahajan, S. Lee, J. Zheng, L. Alvisi, and M. Dahlin. Astro: Au-
tonomous and trustworthy data sharing. Technical Report TR-08-24,
The University of Texas at Austin, October 2008.
[58] D. Malkhi, L. Novik, and C. Purcell. P2P Replica Synchronization with
Vector Sets. ACM SIGOPS Operating Systems Review, 41(2):68–74,
2007.
[59] D. Malkhi and D. Terry. Concise version vectors in WinFS. In Proceed-
ings of the 20th Symposium on Distributed Computing, 2005.
[60] L. Mummert, M. Ebling, and M. Satyanarayanan. Exploiting Weak
Connectivity for Mobile File Access. In Proceedings of the 15th ACM
Symposium on Operating Systems Principles [5].
[61] L. Mummert and M. Satyanarayanan. Large Granularity Cache Coher-
ence for Intermittent Connectivity. In Proceedings of the Summer 1994
USENIX Conference [4].
[62] D. Muntz and P. Honeyman. Multi-level Caching in Distributed File
Systems or Your cache ain’t nuthin’ but trash. In Proceedings of the
Winter 1992 USENIX Conference, pages 305–313, January 1992.
226

[63] A. Muthitacharoen, R. Morris, T. Gil, and B. Chen. Ivy: A read/write
peer-to-peer file system. In Proceedings of the 5th ACM Symposium on
Operating Systems Design and Implementation [7].
[64] A. Nayate, M. Dahlin, and A. Iyengar. Transparent information dis-
semination. In Proceedings of the ACM/IFIP/USENIX 5th International
Middleware Conference, October 2004.
[65] M. Nelson, B. Welch, and J. Ousterhout. Caching in the Sprite Network
File System. ACM Transactions on Computer Systems, 6(1), February
1988.
[66] E. Nightingale and J. Flinn. Energy-efficiency and storage flexibility
in the blue file system. In Proceedings of the 6th ACM Symposium on
Operating Systems Design and Implementation [8].
[67] L. Novik, I. Hudis, D. Terry, S. Anand, V. Jhaveri, A. Shah, and Y. Wu.
Peer-to-peer replication in winfs. Technical Report MSR-TR-2006-78,
Microsoft Research, June 2006.
[68] B. Pawlowski, C. Juszczak, P. Staubach, C. Smith, D. Lebel, and D. Hitz.
NFS Version 3 Design and Implementation. In Proceedings of the Summer
1994 USENIX Conference [4].
[69] K. Petersen, M. Spreitzer, D. Terry, M. Theimer, and A. Demers. Flexible
update propagation for weakly consistent replication. In Proceedings
227

of the 16th ACM Symposium on Operating Systems Principles, October
1997.
[70] V. Ramasubramanian, T. L. Rodeheffer, D. B. Terry, M. Walraed-Sullivan,
T. Wobber, and A. Vahdat C. C. Marshall. Cimbiosys: A platform for
content-based partial replication. In Proceedings of the 6th USENIX
Symposium on Networked Systems Design and Implementation [10].
[71] P. Reiher, J. Heidemann, D. Ratner, G. Skinner, and G. Popek. Resolving
File Conflicts in the Ficus File System. In Proceedings of the Summer
1994 USENIX Conference [4].
[72] P. Reynolds, C. Killian, J. L. Wiener, J. C. Mogul, M. A. Shah, and
A. Vahdat. Pip: Detecting the unexpected in distributed systems. In
Proceedings of the 3rd USENIX Symposium on Networked Systems Design
and Implementation [9].
[73] S. Rhea, P. Eaton, D. Geels, H. Weatherspoon, B. Zhao, and J. Kubi-
atowicz. Pond: the OceanStore prototype. In Proceedings of the 2nd
USENIX Conference on File and Storage Technologies, March 2003.
[74] A. Rodriguez, C. Killian, S. Bhat, D. Kostic, and A. Vahdat. MACE-
DON: Methodology for automatically creating, evaluating, and designing
overlay networks. In Proceedings of the First USENIX Symposium on
Networked Systems Design and Implementation, March 2004.
228

[75] A. Rowstron and P. Druschel. Pastry: Scalable, distirbuted object loca-
tion and routing for large-scale peer-to-peer systems. In Proceedings of
IFIP/ACM International Conference on Distributed Systems Platforms,
Nov 2001.
[76] A. Rowstron and P. Druschel. Storage management and caching in PAST,
a large-scale, persistent peer-to-peer storage utility. In Proceedings of the
18th ACM Symposium on Operating Systems Principles [6].
[77] Y. Saito, C. Karamanolis, M. Karlsson, and M. Mahalingam. Taming ag-
gressive replication in the pangaea wide-area file system. In Proceedings
of the 5th ACM Symposium on Operating Systems Design and Implemen-
tation [7].
[78] M. Satyanarayanan. Scalable, Secure, and Highly Available Distributed
File Access. IEEE Computer, 23(5):9–21, May 1990.
[79] M. Shapiro, K. Bhargavan, and N. Krishna. A constraint-based formal-
ism for consistency in replicated systems. In Proceedings of the 8th Inter-
national Conference on the Principles of Distributed Systems, December
2004.
[80] A. Siegel, K. Birman, and K. Marzullo. Deceit: A flexible distributed file
system. Technical Report 89-1042, Cornell, November 1989.
[81] A. Singla, U. Ramachandran, and J. Hodgins. Temporal notions of syn-
chronization and consistency in Beehive. In Proceedings of the Ninth
229

Annual ACM Symposium on Parallel Algorithms and Architectures, 1997.
[82] S. Sobti, N. Garg, F. Zheng, J. Lai, E. Ziskind, A. Krishnamurthy, and
R. Y. Wang. Segank: a distributed mobile storage system. In Proceedings
of the 3rd USENIX Conference on File and Storage Technologies, 2004.
[83] I. Stoica, R. Morris, D. Karger, M. F. Kaashoek, and H. Balakrishnan.
Chord: A scalable peer-to-peer lookup service for internet applications.
In Proceedings of the ACM SIGCOMM ’01 Conference on Applications,
Technologies, Architectures, and Protocols for Computer Communication,
Aug 2001.
[84] J. Stribling, Y. Sovran, I.Zhang, X. Pretzer, J. Li, M. F. Kaashoek,
and R. Morris. Flexible, wide-area storage for distributed systems with
WheelFS. In Proceedings of the 6th USENIX Symposium on Networked
Systems Design and Implementation [10].
[85] S. Susarla and J. Carter. Flexible consistency for wide area peer replica-
tion. In Proceedings of the 25th International Conference on Distributed
Computing Systems, June 2005.
[86] D. Terry, M. Theimer, K. Petersen, A. Demers, M. Spreitzer, and C. Hauser.
Managing Update Conflicts in Bayou, a Weakly Connected Replicated
Storage System. In Proceedings of the 15th ACM Symposium on Operat-
ing Systems Principles [5].
230

[87] R. Tewari, M. Dahlin, H. Vin, and J. Kay. Beyond Hierarchies: Design
Considerations for Distributed Caching on the Internet. In Proceedings of
the Nineteenth International Conference on Distributed Computing Sys-
tems, May 1999.
[88] R. van Renesse and Fred B. Schneider. Chain replication for support-
ing high throughput and availability. In Proceedings of the 6th ACM
Symposium on Operating Systems Design and Implementation [8].
[89] R. Wang and T. Anderson. xFS: A Wide Area Mass Storage File System.
In Proceedings of the 3rd Workshop on Workstation Operating Systems,
pages 71–78, October 1993.
[90] G. Wuu and A. Berstein. Efficient solutions to the replicated log and dic-
tionary problem. In Proceedings of the 3rd Symposium on the Principles
of Distributed Computing, pages 233–242, 1984.
[91] M. Yabandeh, N. Knezevic, D. Kostic, and V. Kuncak. Proceedings of
the 6th usenix symposium on networked systems design and implemen-
tation. In Proceedings of the 6th USENIX Symposium on Networked
Systems Design and Implementation [10].
[92] J. Yin, L. Alvisi, M. Dahlin, and C. Lin. Hierarchical Cache Consistency
in a WAN. In Proceedings of the 2nd USENIX Symposium on Internet
Technologies and Systems, October 1999.
231

[93] J. Yin, L. Alvisi, M. Dahlin, and C. Lin. Volume Leases to Support
Consistency in Large-Scale Systems. IEEE Transactions on Knowledge
and Data Engineering, February 1999.
[94] H. Yu and A. Vahdat. Design and evaluation of a conit-based contin-
uous consistency model for replicated services. ACM Transactions on
Computer Systems, 20(3), August 2002.
[95] B. Y. Zhao, L. Huang, J. Stribling, S. C. Rhea, A. D. Joseph, and J. D.
Kubiatowicz. Tapestry: A resilient global-sclae overlay for service de-
ployment. In IEEE Journal on Selected Areas in Communications, Jan
2004.
[96] J. Zheng. URA: A Universal Data Replication Architecture. PhD thesis,
The University of Texas at Austin, August 2008.
[97] J. Zheng, N. Belaramani, and M. Dahlin. Pheme: Synchronizing replicas
in diverse environments. Technical Report TR-09-07, University of Texas
at Austin, February 2009.
232

Vita
Nalini Belaramani was born in Hong Kong on the 2nd of November
1978 to two loving parents—Rani and Moti Belaramani. She was soon joined
by her sister, Kiran, who has been her constant source of entertainment ever
since.
Nalini got her first computer in 1996 and was totally intrigued by it.
She decided to “unravel” the mysteries of the computer by getting a BEng
degree in Computer Engineering and a MPhil degree in Computer Science
from The University of Hong Kong.
While working for Motorola Semi-Conductors HK Ltd as an engineer,
she realized that there were more mysteries to be solved and more knowledge
to be found. She join the PhD program at the University of Texas at Austin,
where the weather and the people made her quest for knowledge a grueling,
and yet delightful experience.
And now, with enough knowledge under her belt, she is ready to face
the world.
Permanent address: 16/A South Sea Mansion,81 Chatham Road,TST, KLN, Hong Kong.
This dissertation was typed by the author.
233















![Cementum in Disease[Nalini]](https://img.pdfslide.net/doc/110x75/55cf9d52550346d033ad2077/cementum-in-diseasenalini.jpg)