Embed Size (px)
Citation preview
Creating Small Roadmaps for Solving Motion Planning Problems
Roland Geraerts and Mark Overmars
MMAR 2005
Introduction
• Related work
• Reachability roadmap
• Experiments
• Conclusions & current work
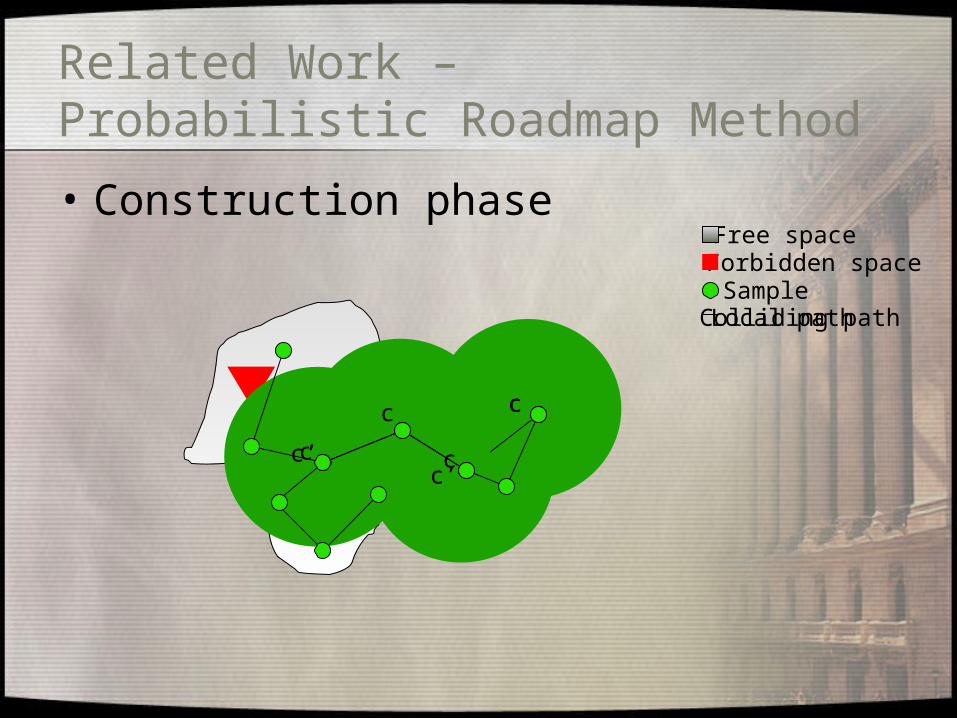
Related Work – Probabilistic Roadmap Method
• Construction phaseForbidden spaceFree space
Sample
c
Colliding path
c
c’
c
Local path
c’c’c
c
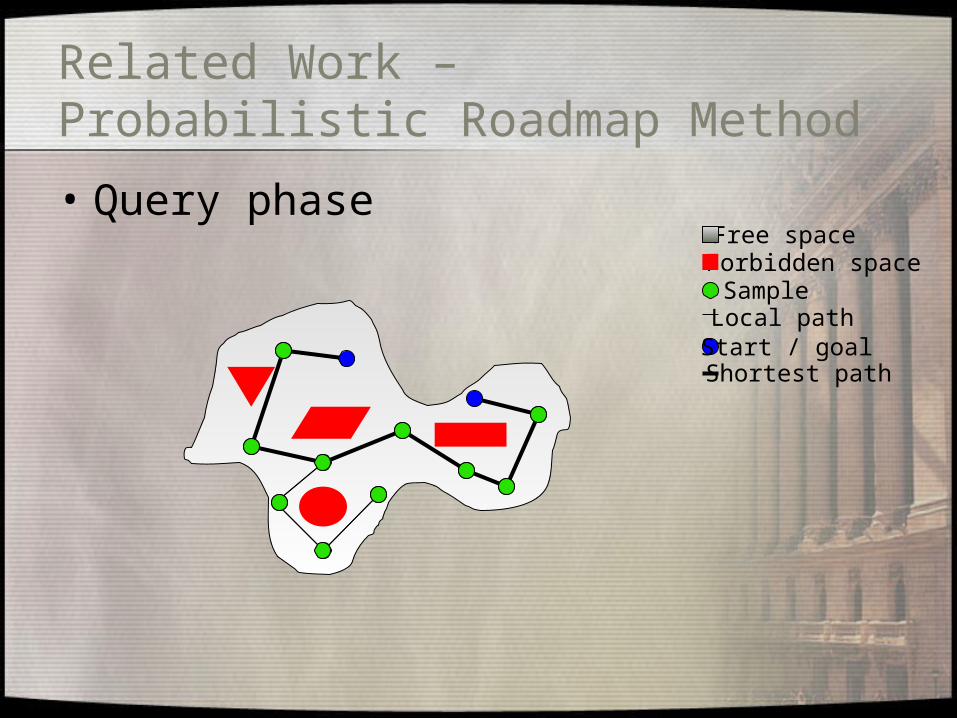
Related Work – Probabilistic Roadmap Method
• Query phaseForbidden spaceFree space
Sample
Start / goalLocal path
Shortest path
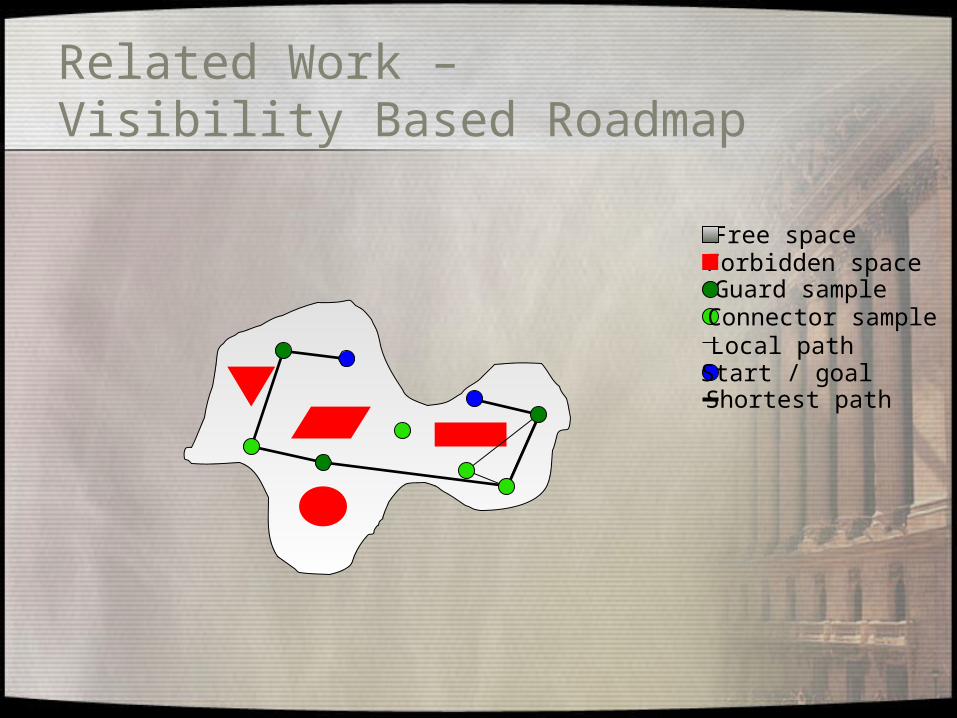
Related Work – Visibility Based Roadmap
Forbidden spaceFree space
Connector sampleGuard sample
Local pathStart / goalShortest path
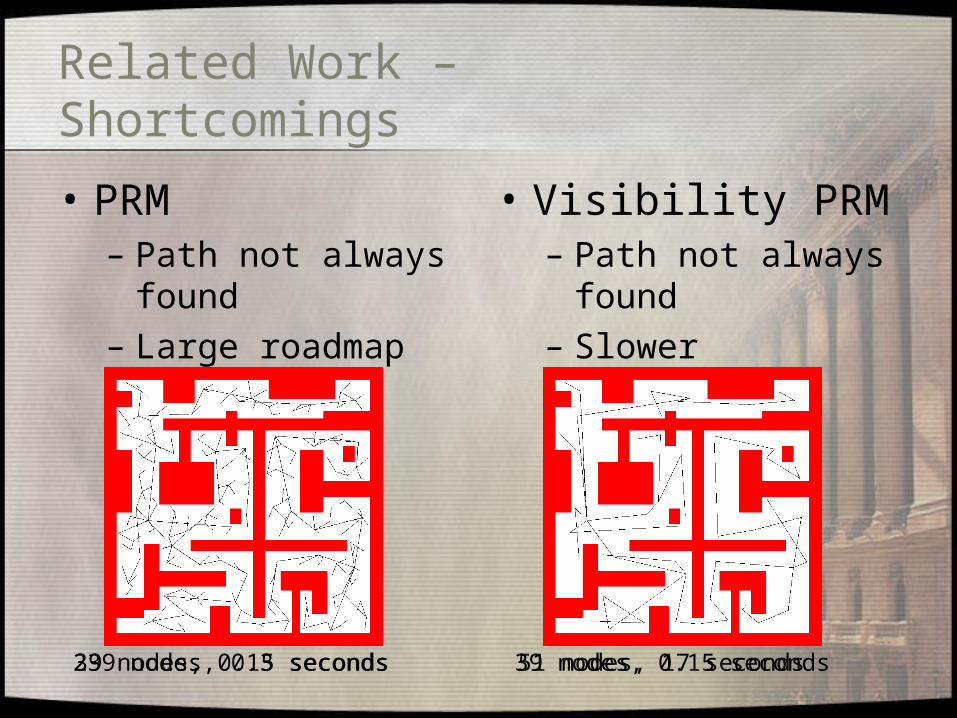
Related Work – Shortcomings
• PRM– Path not always found
– Large roadmap
• Visibility PRM– Path not always found
– Slower
239 nodes, 0.3 seconds 51 nodes, 17 seconds39 nodes, 0.15 seconds 39 nodes, 0.15 seconds
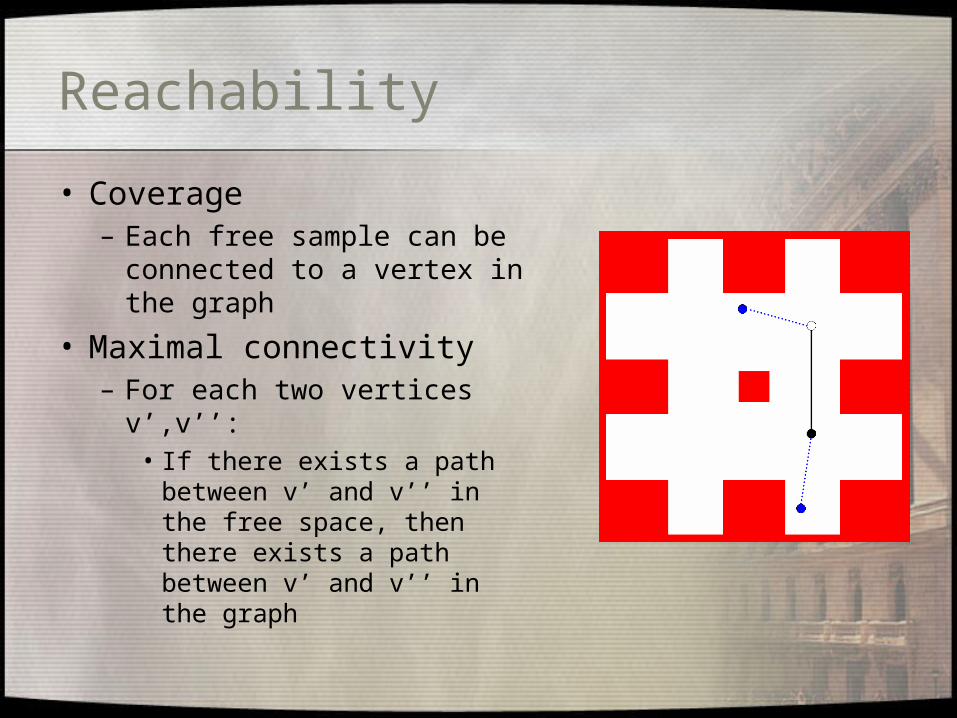
Reachability
• Coverage– Each free sample can be
connected to a vertex in the graph
• Maximal connectivity– For each two vertices v’,v’’:
• If there exists a path between v’ and v’’ in the free space, then there exists a path between v’ and v’’ in the graph
Reachability Roadmap
• Coverage
• Maximal connectivity
• Roadmap pruning
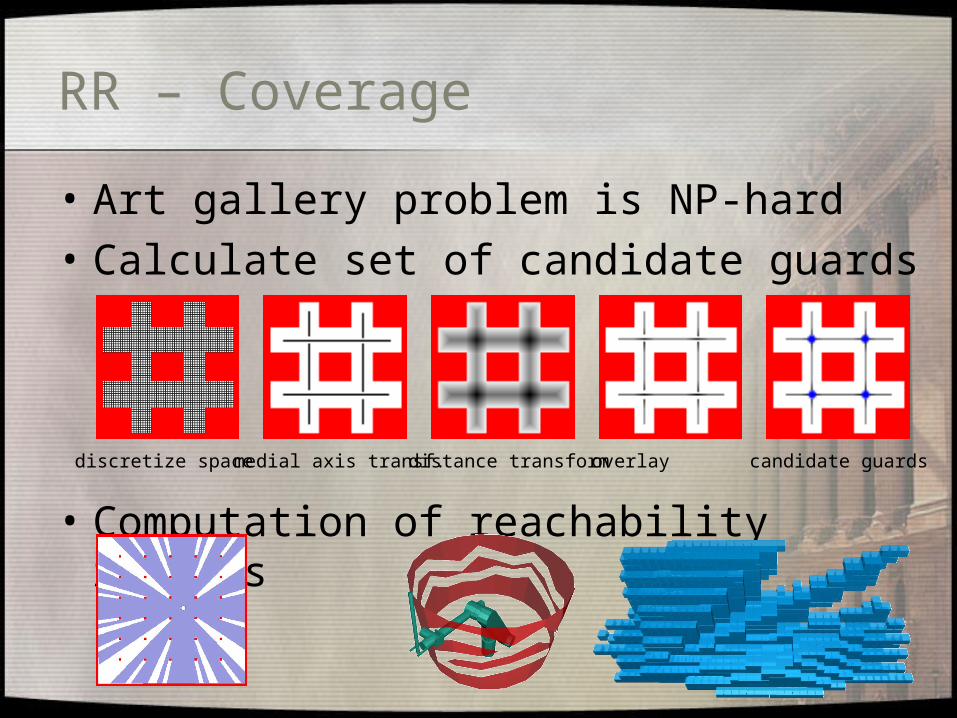
RR – Coverage
• Art gallery problem is NP-hard
• Calculate set of candidate guards
• Computation of reachability regionsdiscretize space medial axis transf. distance transform overlay candidate guards
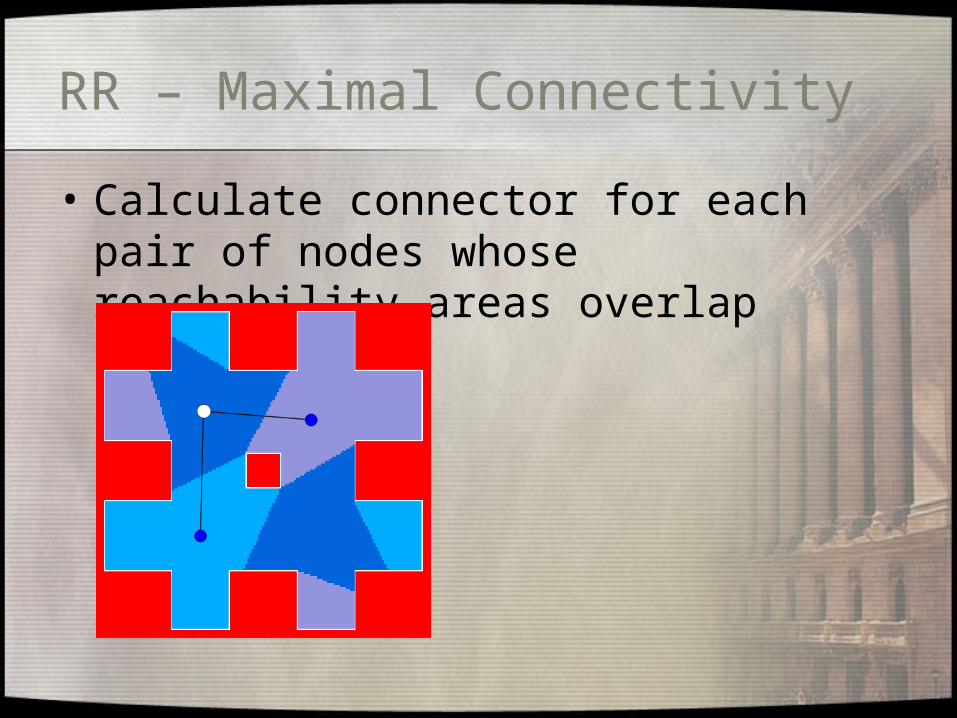
RR – Maximal Connectivity
• Calculate connector for each pair of nodes whose reachability areas overlap
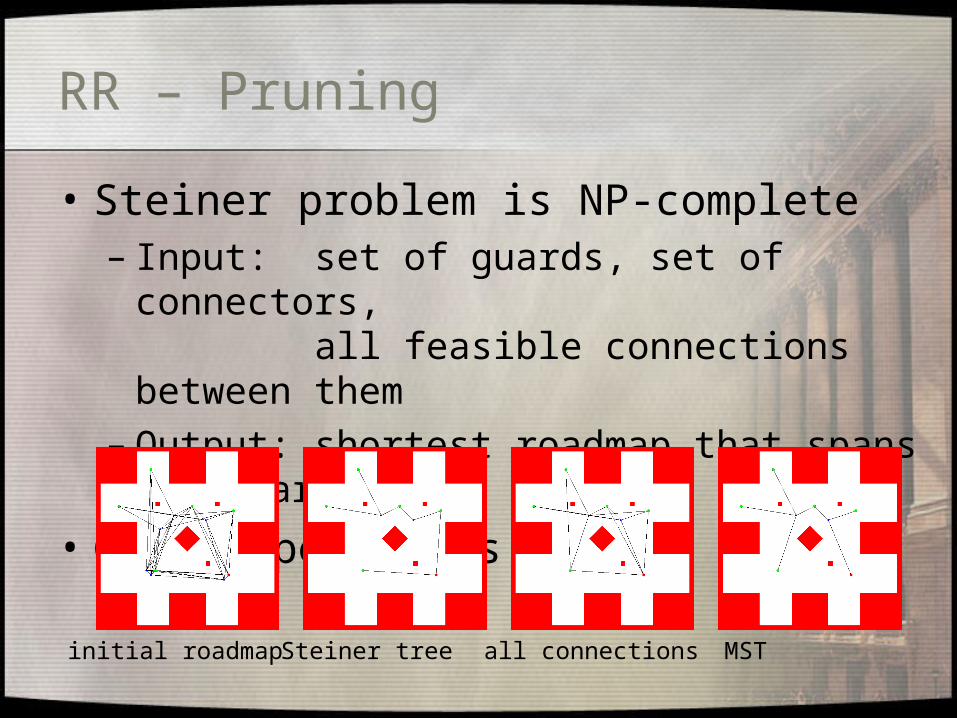
RR – Pruning
• Steiner problem is NP-complete– Input: set of guards, set of connectors,
all feasible connections between them
– Output: shortest roadmap that spans the guards
• Graph operations
initial roadmap Steiner tree all connections MST
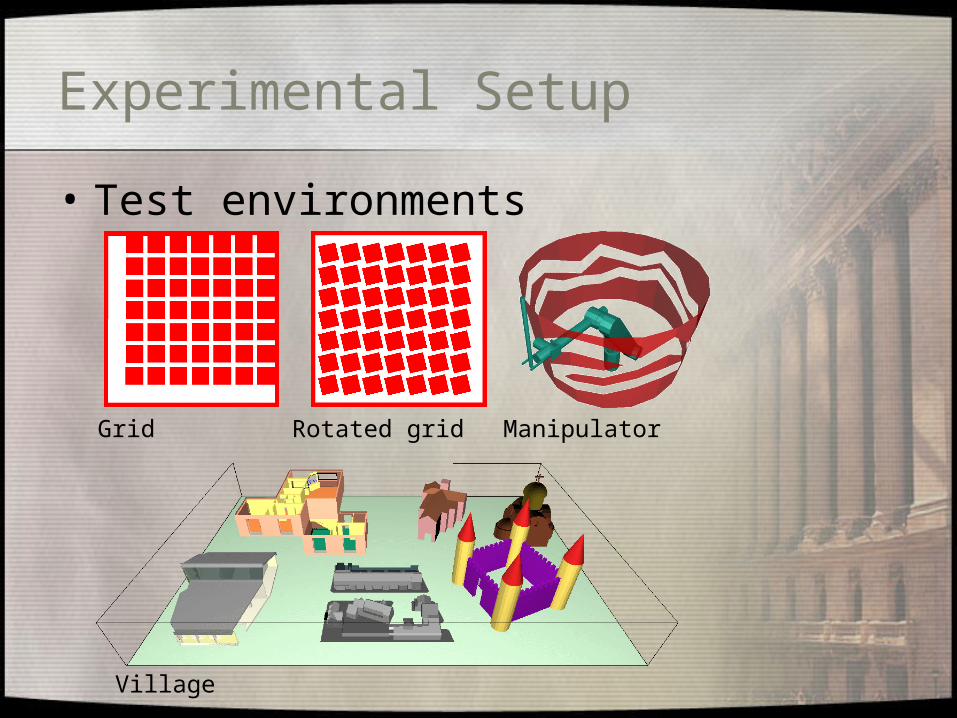
Experimental Setup
• Test environments
Grid Rotated grid Manipulator
Village
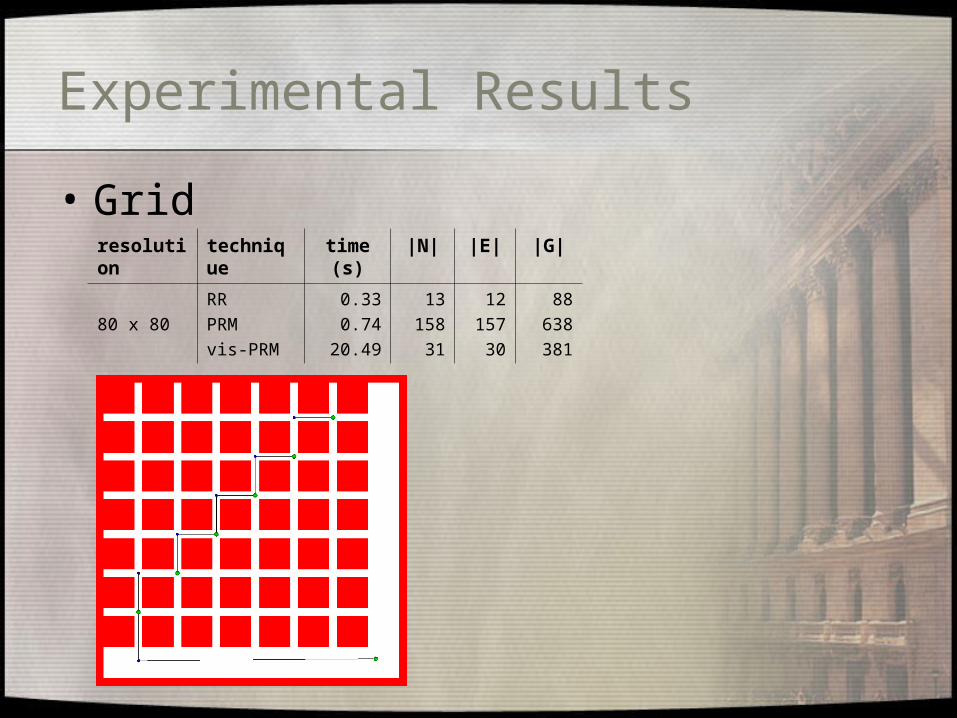
Experimental Results
• Gridresolution technique time (s) |N| |E| |G|
80 x 80
RR
PRM
vis-PRM
0.33
0.74
20.49
13
158
31
12
157
30
88
638
381
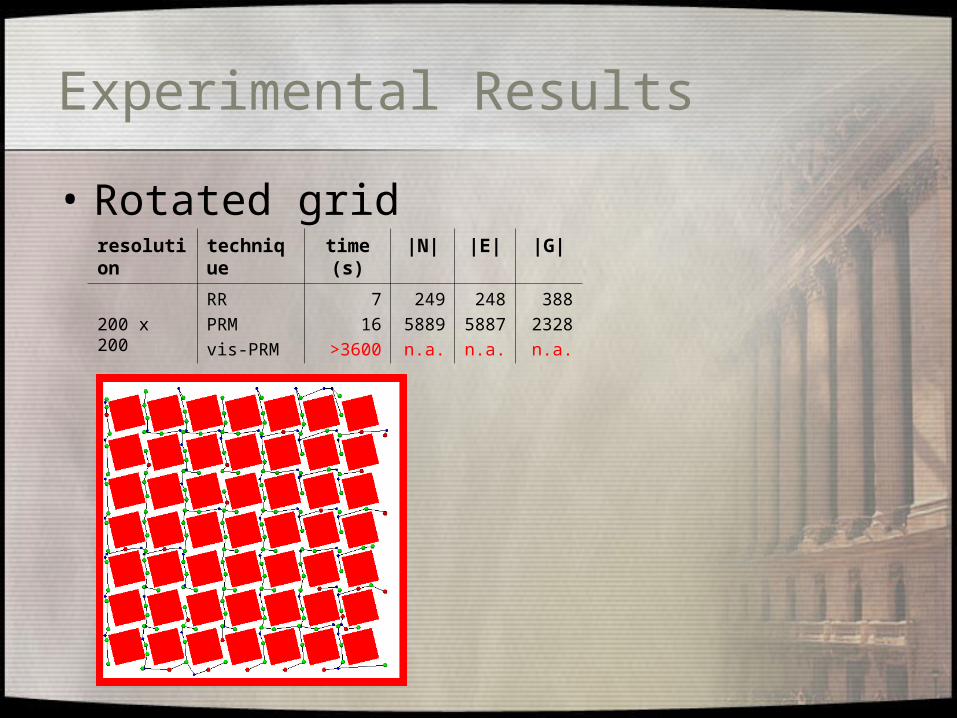
Experimental Results
• Rotated gridresolution technique time (s) |N| |E| |G|
200 x 200
RR
PRM
vis-PRM
7
16
>3600
249
5889
n.a.
248
5887
n.a.
388
2328
n.a.
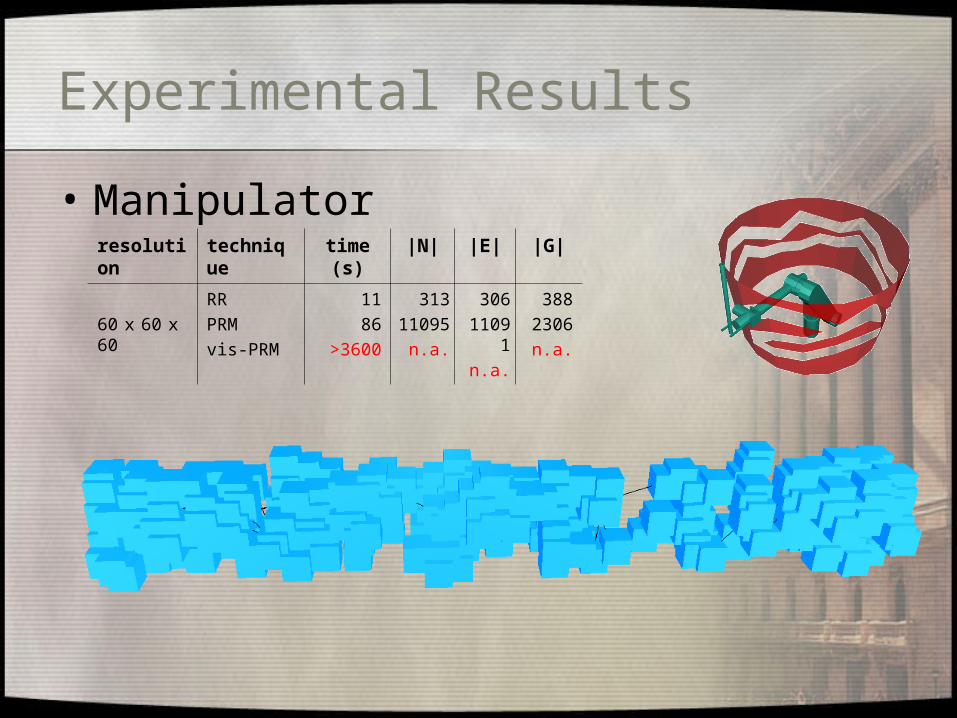
Experimental Results
• Manipulatorresolution technique time (s) |N| |E| |G|
60 x 60 x 60
RR
PRM
vis-PRM
11
86
>3600
313
11095
n.a.
306
11091
n.a.
388
2306
n.a.
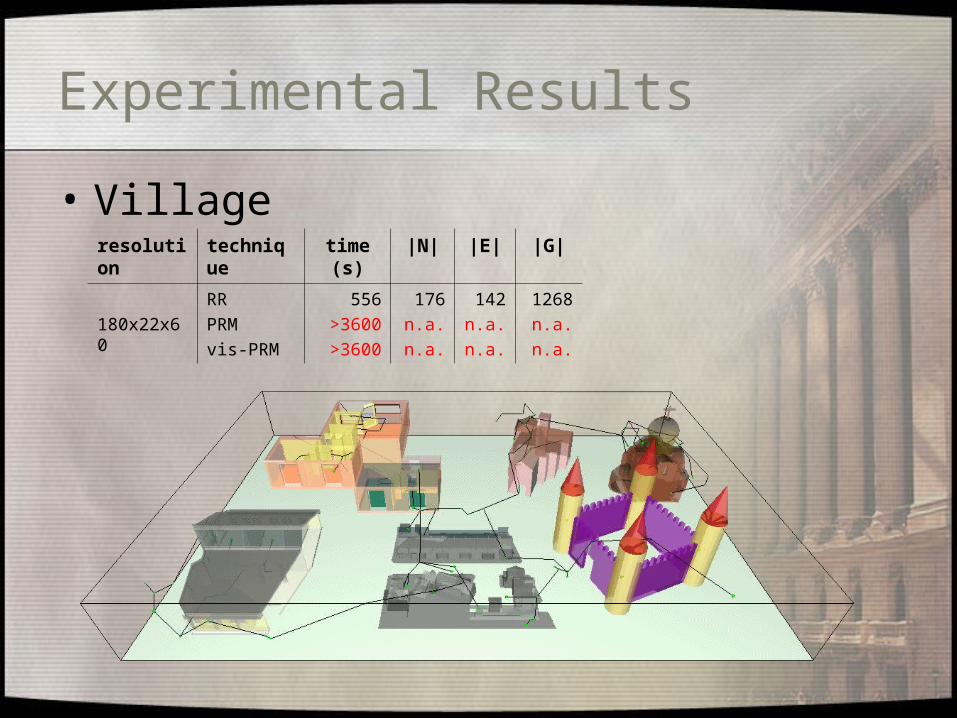
Experimental Results
• Villageresolution technique time (s) |N| |E| |G|
180x22x60
RR
PRM
vis-PRM
556
>3600
>3600
176
n.a.
n.a.
142
n.a.
n.a.
1268
n.a.
n.a.
Conclusions
• New algorithm for creating roadmaps– Roadmap is small– Roadmap is resolution complete– Efficient for 2D and 3D problems
• Roadmap of RR is much smaller than the roadmap created by the PRM
• Vis-PRM creates small roadmaps, but takes much time to terminate
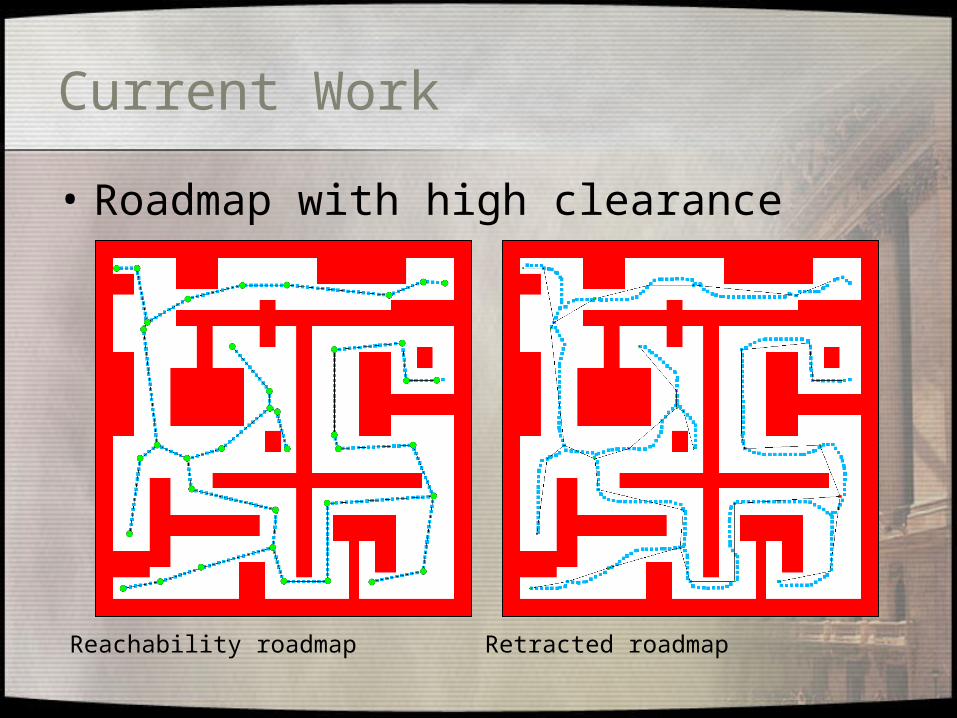
Current Work
• Roadmap with high clearance
Reachability roadmap Retracted roadmap
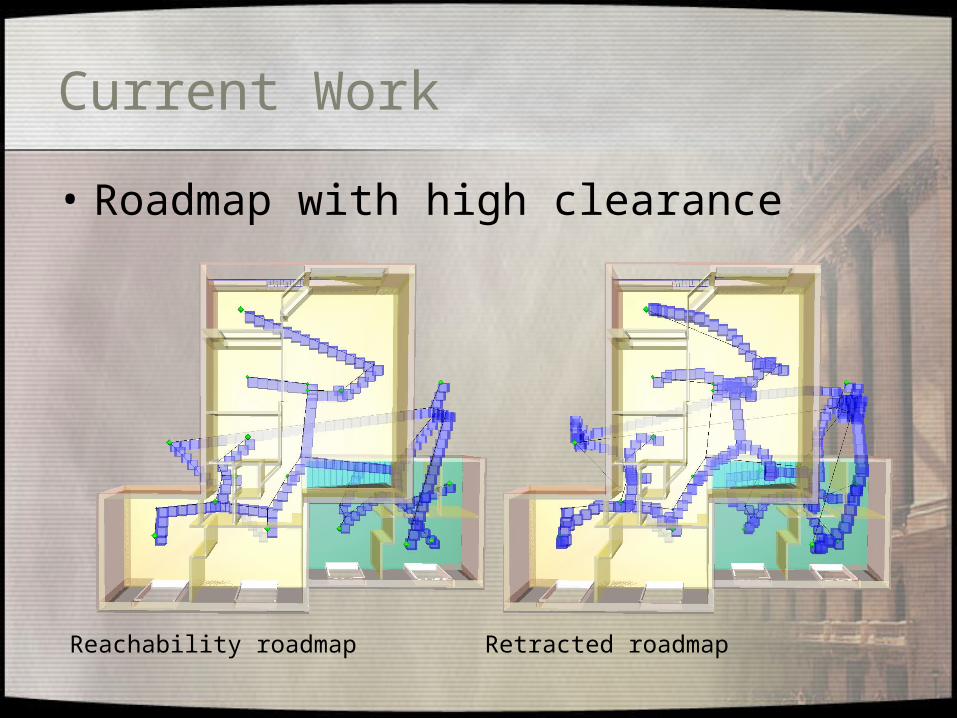
Current Work
• Roadmap with high clearance
Reachability roadmap Retracted roadmap
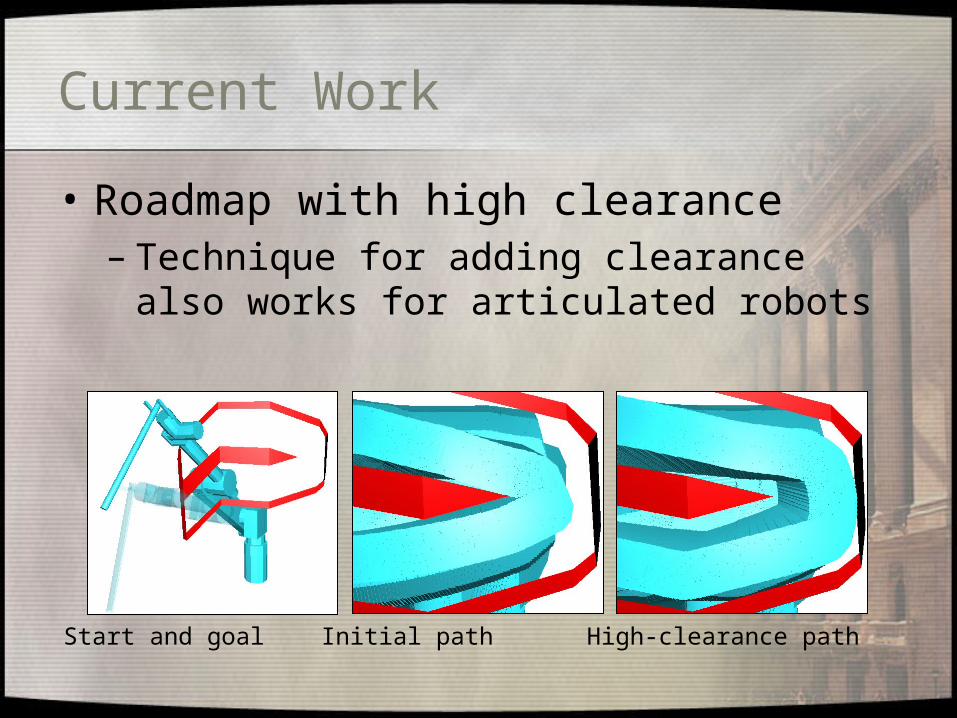
Current Work
• Roadmap with high clearance– Technique for adding clearance also works for
articulated robots
Start and goal Initial path High-clearance path





























![Sampling Strategies By David Johnson. Probabilistic Roadmaps (PRM) [Kavraki, Svetska, Latombe, Overmars, 1996] start configuration goal configuration](https://img.pdfslide.net/doc/110x75/56649cdf5503460f949a9124/sampling-strategies-by-david-johnson-probabilistic-roadmaps-prm-kavraki.jpg)