Embed Size (px)
Citation preview

P16105 CubeSat Attitude Determination Control System (ADCS) Testing Apparatus
Bradley Conn (BS/MS Computer Engineering), Jakob Krzyston (BS Biomedical Engineering) 12/8/16
Abstract
Miniaturized satellites, better known as CubeSats, are of growing interest in academia to
conduct research in space. Before a CubeSat can be sent into orbit, it needs to undergo testing to ensure its performance amidst its journey. At Rochester Institute of Technology (RIT), the RIT Space Exploration research group (RIT SPEX) is aiming to develop and test their own CubeSats. Lacking the testing capabilities to conduct the required tests, RIT SPEX cannot perform in-house testing. Additionally, RIT SPEX does not have the financial support to purchase the necessary equipment, nor send CubeSats to a testing facility. To fill this void, P16105 developed and executed an inexpensive magnetic field ADCS testing apparatus. A three axis Helmholtz coil cage, the apparatus produces time varying magnetic fields to simulate a CubeSat’s experience during orbit. The user is able to customize the desired orbit In addition to costing significantly less than commercially available systems, this apparatus is fully collapsible and is operable via a graphical user interface.
Introduction and Literature Review
With the ever increasing desire to conduct research in space, a demand for cheaper
alternatives to traditional satellites was needed. With the relatively recent advent of CubeSats, a more economically feasible option to conduct such research was born. CubeSats are used by universities, research groups, and industry to conduct their own research in space. However, before one can send a CubeSat into space, tests must be conducted in order to verify its performance under certain space related conditions, which has to be done here on Earth.
The RIT Space Exploration research group (RIT SPEX) has formed to attract those interested in and/or looking to pursue a career in the aerospace industry. Initially, the group developed and launched high altitude balloons. As the group has grown, it is expanding its horizons to design, develop, and test their own CubeSats in order to enable the RIT community to conduct research in space. However, RIT SPEX currently does not have these testing capabilities, the financial backing to purchase testing equipment from a manufacturer, nor the financial support to send a CubeSat to a testing facility.
One of the primary subsystems of a CubeSat is the Attitude Determination and Controls System (ADCS). The ADCS system of a CubeSat activates magnetorquers in order to achieve

proper alignment during orbit. Other subsystems, notably communications and energy harvesting, are optimized when the ADCS system functions properly. Thus, sending an improperly tested ADCS system into orbit is not only a large risk for the sake of the payload, it puts the money and time invested at stake. ADCS testing includes subjecting the CubeSat to varying magnetic fields, in both direction and magnitude. ADCS testing is meant to mimic the types of magnetic fields the CubeSat will experience while it is in orbit, both equatorial and polar orbits.
Current ADCS testing models, available to purchase, are priced as low as $2,000 and as high as $22,000. As finances are a burden to an emerging, student run group, constructing their own testing equipment is the best way for the group to move forward. Furthermore, RIT SPEX requires testing equipment that can be stored in a small volume, as their storage space is very limited. There are no available products for purchase that allow the apparatus to consolidate into a smaller volume. After thorough research, an ADCS apparatus that could be taken apart was not found, as this is a very rare request for this type of equipment.
Previous Helmholtz coil cages have been produced at many universities, such as the Delft university [1], the Air Force Institute of Technology [2], and the University of Michigan [3] , however the size, cost, and permanence do not align very well with meeting all of the objective constraints required. There is one previous work which much more closely matched the objectives similar to the own from the California Polytechnic State University [4]. This work provided equations to calculate the number of turns of wire, and amperage required to produce the magnetic fields desired. It also provided a formula to determine the size of each of the coils to fit inside each other for the 3 axis cage structure. Additionally, the theory of operation was described which inspired many of the design choices in the software as well.
The main deliverable of this project is to design, build, and test a magnetic field
producing, ADCS testing apparatus that is comparable to pre-existing ADCS testing rigs. The final design was to provide a cost effective option that can be utilized by RIT SPEX for future testing. Additionally, the final product was to fit in the RIT SPEX lab, or must be collapsible so it can fit seamlessly into the RIT SPEX storage area, and be easily interfaced with via MATLAB.
Design Process There were a variety of specifications for this project that fell into a breadth of fields,
including financial, mechanical, software, and magnetic requirements. With respect to the financial restrictions of this project, P16105 were instructed to develop an ADCS testing system for under $500. In the mechanical realm, the ADCS testing rig was to be deconstructable in order to fit into tight storage areas. With respect to software, the customers requested the

device to be operable through MATLAB. As the majority of engineering students here at RIT will use MATLAB in their courses, MATLAB was seen as a common denominator interface.
As collapsable ADCS Cages are unorthodox, attaining complete collapsibility was one of the primary design challenges. There were many different ideas to go about completing this customer requirement. For example, an idea considered was to have a collapsible cube cage that would break down into individual beams. Derived from this, another potential idea was to have the cube cage able to collapse, without detaching pieces, rather by pivoting at the joints and folding the stricture into itself. An aberrative idea was to have an inflatable cage. Ultimately, the final design included circular coils, orthogonal to each other, with extra pieces to assure placement. Circular coils were chosen due to the ability to model magnetic field strengths with the Biot Savart law.
Determining the feasibility of this project came down to a few major components. These components are ensuring the magnetic field volume and strength are met, collapsed dimensions are met, and budget is not exceeded. Regarding the magnetic fields, the Biot Savart law, mentioned prior, was used to derive the minimum size for each coil to produce a uniform magnetic field able to contain a 10cm x 10cm x 10cm cube. A constraint was added early on which helped derive the specifications. This constraint was requiring compatibility with the most common power supply available at RIT, a triple output power supply with at least 6 Volts and 1 Amps across each of the three outputs. As the coils could not be the same size, due to the requirement for collapsibility, and the limited potential for provided power, the Biot Savart law was crucial in deriving the amount of wire needed, amperage demand, and diameter for the coils. Once determined, Finite Element Method Magnetics (FEMM) was used to assure these calculations. With respect to meeting the collapsed spatial requirement, the derived coil sizes helped to assure the final design would not exceed the benchmark set. Lastly, cost was of utmost importance as P16105 were given the minimum budget. As mentioned prior, it was assumed the users will be able to procure a power supply, this allowed for the budget to be allotted entirely to the apparatus. From the Biot-Savart and the FEMM analyses, research was done to estimate how much wire was going to cost us. As P16105 were able to derive the coils size, and with coil design complete, a proper estimate was made as to how much it would cost to buy enough structural material, plywood. Furthermore, as a part of the design, and with access to low cost 3D printing on campus, 3D printing costs were not going to be a large determining factor in meeting the budget. Engineering Model
The coils were made from sheets of ¼” plywood that were cut into semicircular shapes by a Computer Numerical Control, CNC, machine. These pieces were then glued together, with

wood glue, to create the six coils. Providing ample time for the glue to cure, the coils were then treated with spar urethane to prevent the coils from expanding or contracting due to environmental conditions.
After returning from summer internships, P16105 went on to wrap the coils with 154 turns of magnet wire. This was a time consuming and tedious process as extra precaution was taken to ensure the inlay of the wires was completed at a high standard, ensuring performance. Holes were then drilled out of the coils to allow the wire to feed in and out of the coils. The coils were then covered with a layer of silicone to prevent the wiring from being tampered with, also proving an extra measure of weather-proofing to the design.
Amidst all of this coil manufacturing, the connecting pieces were being 3D printed. There were 22, 3D printed pieces in total to complete this design. The pieces connecting to the horizontal bars were connected with cyanoacrylate. The pieces attached to the coils were also super glued on with a gap filling cyanoacrylate.
In order to keep the coils in a desired regulated orientation, an overhead ‘crossbar’ was created to act as a structural ‘marionette’. This was created from two pieces of spare wood, found in the lab, and using a hammer and chisel on them to create grooves within them so they interlocked at the desired orientation. Wood glue was applied to these pieces to create the overhead bar. To finish this piece of the apparatus, the corresponding 3D printed pieces were glued on, with cyanoacrylate, at the proper locations.
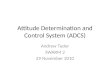
Using extra wood pieces P16105 had found around the design lab, P16105 went on to create ‘guide’ pieces. These guide pieces were used to help ensure repeatability of the construction.A mitre saw and a hacksaw were used to create these pieces After the desired locations for such pieces were measured, they were adhered with cyanoacrylate. Regarding the guide pieces for the feet, these were made out of wood found in the lab. One of the pieces was made by using a miter saw to cut into a piece of wood, at desired locations, and clearing the sections with a hammer and chisel. The portions cleared out in these pieces was done by using an end mill for precision and a tight fit. The precise feet pieces were glued onto the original feet guides to create bottom stabilizing pieces that were easy to implement. See Figures 1, 2, 3, and 4 for visual depictions of the device.
As the entire apparatus is a large electromagnet, circuit design and wiring were a crucial part of the execution. A circuit was designed to handle powering the 6 coils from a single three output power supply. Each of the coil pairs was driven by one output. By the Biot Savart law, simply inducing a current through the coils produced a magnetic field, and thus the circuit remained very basic. Flexible braided wire was used to to prevent possible damage to the wire from handling. Male and female banana plugs were attached to the ends of the wire for easy connection and disassembly. The wires were joined with solder for a permanent solution, and

heat shrink was added to cover the solder joints to prevent damage and add insulation to prevent short circuits. The relay and Arduino were enclosed in a plastic electric box again to form a more permanent solution and prevent damage. Holes were drilled into the enclosure to allow the wires to enter and exit.
In order to control the electromagnet, and manipulate it to produce the desired field, software development became an important aspect to the project. The software was designed to work in three stages. First, everything gets initialized. Then, a magnetometer is placed in the center of the cage and the power supply alters the voltage on the coils, producing magnetic field changes. These values are logged creating a giant lookup table mapping voltages to magnetic field. Finally, a file of desired magnetic fields is read, and the fields are produced over time with the help of the lookup table. A Graphic User Interface (GUI) was created for user simplicity. This GUI had different buttons for initialization, as well as four buttons for actually running the apparatus. These four buttons provided the ability to automatically create the previously mentioned lookup table, set a single magnetic field value, set a series of magnetic field values for orbital simulation, and read a magnetic field.
Figure 1 - Isometric view of the completed structure

Figure 2 - Front view of the completed project
Figure 3 - Front view of the apparatus fully collapsed
Figure 4 - Side view of the apparatus fully collapsed

Experimental Setup and Procedure There were four tests required to meet the customer standards. Those tests included the
Final Collapsed Volume Test, Environmental Evaluation, Assembly Speed and Accuracy Test, and the ADCS Cage Duration Test.
The role of the Final Collapsed Volume Test was to ensure the method and end result of disassembly satisfy the requirement set out by the customer. The test setup included an assembled Helmholtz coil cage, without the magnetometer, and without any electrical components connected. Additionally, the volunteer should have reviewed the documentation and media regarding assembly, disassembly, and storing the device. During this test, the volunteer is asked to disassemble the apparatus, per the instructional material and media provided. Once the volunteer determined the assembly was in the final storage phase, the collapsed volume was measured. This test was ran by four different individuals, in triplicate.
The role of the Environmental Evaluation Test was to ensure the safety of the design in regards to the magnetic fields produced and any other by-products of operation. The test setup included an assembled Helmholtz coil cage, without the magnetometer, and with all electrical components connected. During the test, the volunteer turned the power supply on, and let the apparatus run for 15 minutes. Then, the magnetometer, while taking readings, was walked around the apparatus, about 2 ft away. The magnitudes of these measurements was taken and measured against standards researched. Notes were taken regarding other effects of operation, (thermal, emissive, etc). This test was ran by four different individuals, in triplicate.
The role of the Assembly Speed and Precision Test was to determine whether or not the the process of assembly was repeatable with a high level of precision, defined by piece placement, and not time consuming. The test setup included an assembled Helmholtz coil cage, without the magnetometer, and without any electrical components connected. Additionally, the volunteer should have reviewed the documentation and media regarding assembly, disassembly, and storing the device. During this test, the volunteers were asked to assemble the apparatus quickly, while aiming to achieve a high level of precision, regarding part placement. This process was timed to be recorded and analyzed later on. Once assembled, the electrical components were connected, the magnetometer was put inside, and the device was given the proper voltage to produce a 0 +/- 2 Gauss magnetic field. The readings from the magnetometer were used to verify this achievement. As this test needed to be executed in pairs, this test was conducted with two sets of partners, in triplicate.
The role of the ADCS Cage Duration Test was to ensure it is capable of running for long durations without failing (overheating, mechanical stress, etc.) as ADCS tests can be conducted over long durations. The test setup included an assembled Helmholtz coil cage, with the magnetometer, and without any electrical components connected. During this test, The

individual was asked to correctly connect all of the electrical components, as per the documentation and media provided. With the magnetometer recording readings of 0 +/- 2 Gauss, the apparatus was left to run for 4 hours. After the 4 hours, the volunteer evaluated the state of the structure and looked for any defects, aberrations, or failures (such as overheating, shorted circuitry, fractures in pieces, etc.) As this test took many hours to complete, this was completed by two individuals, each performing one trial. Data Analysis
Table 1 - Results from the Final Collapsed Volume Test


Table 2 - Results from the Environmental Evaluation Test

Table 3 - Results from the Assembly Speed and Accuracy Test
Table 4 - Results from the Cage Duration Test
Results and Interpretation
From Table 1, it is shown the volunteers were able to deconstruct the apparatus consistently under a measured volume of 0.07 m3. With an upper limit for acceptable maximum collapsed volumed of 1 m3 and an ideal maximum collapsed volume of 0.25m3, the executed design meets and exceeds the expectation. The variation in results derives from the the particular individual’s level of detail.

Table 2 reveals a trend of the greatest maximum, exterior magnetic field to be 1.653 Gauss. With prior research concluding magnetic fields under 5 Gauss were deemed safe, this test concludes the design is safe for operation and use by the general public.
The results from the Assembly Speed and Precision Test, seen in Table 3, show the presence of a learning curve regarding the construction of the device. However, the third trial for both teams met the marginal value of 10 minutes. As the user become more accustomed to the procedure, this time could reach the ideal time of 5 minutes.
From Table 4, the constructed state of the structure maintained for periods of 4.5 and 14 hours. With an ideal duration of at least 4 hours, the apparatus proves to meet and exceed this design requirement. Conclusion
The objective of creating an apparatus that could simulate an orbit was successfully achieved through the design, construction, and execution of a 3 axes Helmholtz coil cage. As different specifications were considered for the design, the coils were simulated and analyzed to ensure all of the specifications were met. Materials were then purchased and the cage was constructed. Algorithms and a graphical user interface were created to employ changing the magnetic field. Upon completion, the cage was tested against the specified performance requirements. After reviewing the test results, the completed design has met or exceeded all customer and engineering requirements. Recommendations for Future Work
The next step in this work would be to develop an air bearing table as a test bed for the CubeSat. Providing a ‘friction - less’ support for the CubeSat to rotate freely about all axes would be an ideal way to test the ADCS system of a CubeSat within the ADCS testing apparatus.

Bibliography [1] F.M. Poppenk, R. Amini, and G.F. Brouwer, Design and Application of a Helmholtz Cage for Testing NanoSatellites. Delft University of Technology, The Netherlands, 2007. [2] M. R. Brewer, Cubesat attitude determination and helmholtz cage design, Master’s thesis, Air Force Institute of Technology, United States (2012) [3] A. Klesh, S. Seagraves, M. Bennett, D. Boone, H. Bahcivan, J. Cutler, “Dynamically driven helmholtz cage for experimental magnetic attitude determination”, AAS/AIAA Astrodynamics Specialist Conference, Pittsburgh, PA, 2009. [4] Foley, Justin Dean. Calibration and Characterization of CubeSat Magnetic Sensors using a Helmholtz Cage. M. S. thesis, California Polytechnic State University, 2012.

Acknowledgements We would like to thank RIT SPEX and Multidisciplinary Engineering at RIT for
sponsoring the project and providing funds. P16105 would also like to thank Justin Dean Foley, Tom Bitter (guide), John Wellin and Mark Indovina (technical aids), as well as the Construct at RIT for providing us with advice along the way to help us realize the end goal.