Embed Size (px)
Citation preview

CURSO-2006 1.1
Topics about of design and Topics about of design and construction of experimental construction of experimental parallel robots in DISAM parallel robots in DISAM (based on examples)(based on examples)
Roque Saltaren Universidad Politécnica de Madrid, SPAIN

1.2Universidad Politécnica de Madrid
ContentsContents
1. Relevant characteristics of some parallel robots develops for biomechanics applications
2. Kinematics modeling and design considerations3. Dynamics modeling and design considerations4. Mechanical design and construction5. Hardware and control
Hardware architecture based on PC-104/PowerPC + LAN
Hardware architecture based on multiaxis card Hardware architecture based on dSPACE
6. User interfaces7. Real time operative systems (RTOS).8. Integration9. Conclusions: Real prototypes or scale prototypes:
The best techniques.

1.3Universidad Politécnica de Madrid
……Relevant characteristicsRelevant characteristics
Spherical pivot parallel platforms for robots (3RPS, 3PRS and 3RRS)
Applications: Prosthesis, endoscopies, humanoid necks, shoulders and eyes
Three types of kinematics configurations: End effectors articulate by
spherical joints
Short radius of turn
Reduce work space
Robustness
Easy of assembly and
machining

1.4Universidad Politécnica de Madrid
……Relevant characteristicsRelevant characteristics
…..Spherical pivot platforms for robots
Mechanical parts can impose limitations:
Standard spherical joints works with: +/- 30º
Special spherical joints can allows +/- 90º
Actuators (better options)
Powering by cable
High technology cables: FORTATECH
(very good option!)
Powering by ball screws and servomotors
SKF (low cost) + Maxonmotor;
SteinMeyer (high cost) + Maxonmotor
(micro ball screws : 3 mm. aprox 350 eur.)
Powering by servomotors (aprox.

1.5Universidad Politécnica de Madrid
……Relevant characteristicsRelevant characteristics
…..The 3 RRR configuration The Agile Eye
topics Easy of machining Servomotor + gear
reductor + arm = high torque
Very fast

1.6Universidad Politécnica de Madrid
…….Relevant characteristics.Relevant characteristics
…3UPU platforms Based on linear actuators With special universal joints =
high work space Singular configurations Very simple, except by the
rings, that need take account de P point (the P point is allow machining the rings with inclined planes to aligning the axis of the universal joints
Estimated costs, for example: Maxonmotor 20 W + Gear
Reductor Maxon + SKF ball screw + machining = 1000 eur.Rings: less of 150 eurosAmplifiers Maxon : 170 eur.
1.7Universidad Politécnica de Madrid
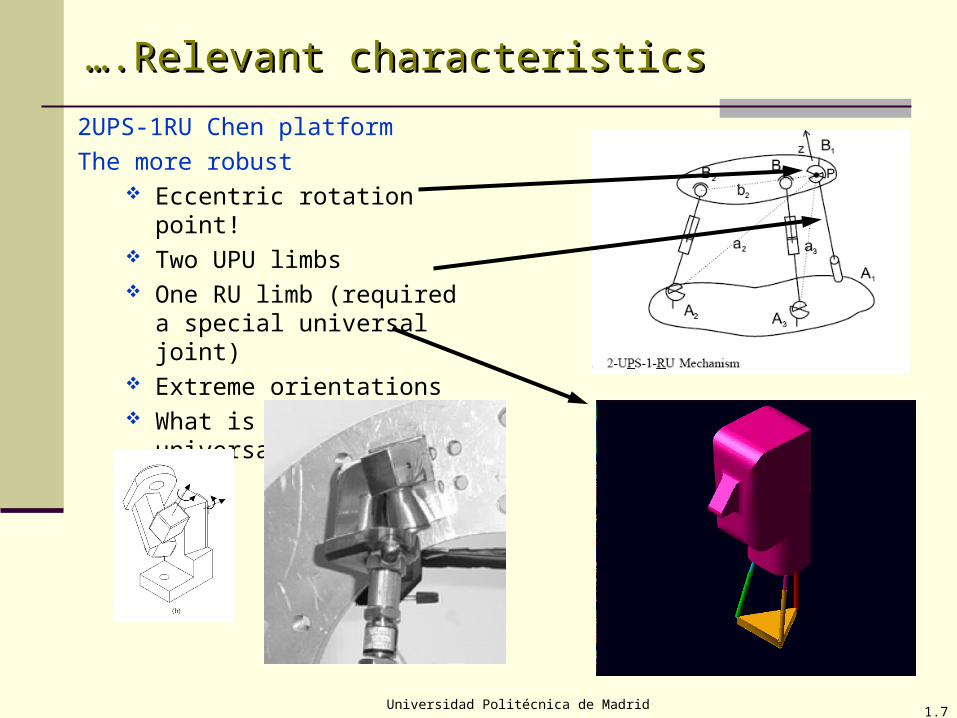
…….Relevant characteristics.Relevant characteristics
2UPS-1RU Chen platform
The more robust Eccentric rotation point! Two UPU limbs One RU limb (required a
special universal joint) Extreme orientations What is a special universal
joint?

1.8Universidad Politécnica de Madrid
……Relevant characteristicsRelevant characteristics
Example-1.Performance evaluation of spherical parallel platforms for humanoid robots

1.9Universidad Politécnica de Madrid
……Relevant characteristicsRelevant characteristics
Example-1.…Performance evaluation
Goals: Allows the work space of the neck or shoulder !

1.10Universidad Politécnica de Madrid
……Relevant characteristicsRelevant characteristics
Example-1.…Performance evaluation

1.11Universidad Politécnica de Madrid
……Relevant characteristicsRelevant characteristics
Example-1.…Performance evaluation

1.12Universidad Politécnica de Madrid
……Relevant characteristicsRelevant characteristics
Example-1.…Performance evaluation

1.13Universidad Politécnica de Madrid
……Relevant characteristicsRelevant characteristics
Example-1.…What is the better option ?

1.14Universidad Politécnica de Madrid
……Relevant characteristicsRelevant characteristics
…..Stewart-Gough parallel robots
Mechanical parts can impose limitations:
Standard spherical joints works with: +/- 30º
Special spherical joints can allows +/- 90º
Actuators (better options!)
Powering by ball screws and servomotors
SKF + Control Techniques
Low cost: Ball screws (medium precision)
High cost: Ruler screws: very good
precision (aprox. 350 eur.)
Control Techniques servomotors
Examp. UNIMOTOR + Amplifier (800-
2000 eur.
An experimental medium size S-G platform can
to have a cost of: 10.500 eur.
An experimental small size S-G platfor can to
have a cost of: 6.000 eur.

1.15Universidad Politécnica de Madrid
……Relevant characteristicsRelevant characteristics
…..Stewart-Gough parallel robots
How allows the maximum work space ?
Changing the spherical and universal joints by special joints!!

1.16Universidad Politécnica de Madrid
……Relevant characteristicsRelevant characteristics
….How allows the maximum work space ?

1.17Universidad Politécnica de Madrid
..Kinematics modeling and design consideration..Kinematics modeling and design consideration
Two problematic aspects: Singularities (restrictions
over the work space!!) Don’t forget the theory!
(Hunt, Fletcher, Di-Gregory, etc.)
Modeling with screw based jacobian
Path planning control in base to the Conditioning Index CI, and Global Conditioning Index GCI
Direct kinematics solution: Numerical methods
based on multibody mechanics and Newton-Raphson methods!!
Design considerations: GCI index very useful to
know and understand the machine

1.18Universidad Politécnica de Madrid
……Dynamics modeling and design considerationsDynamics modeling and design considerations
For a Stewart-Gough platform: Dynamics modeling:
Multibody dynamics: we are use two ways:1. Programming with ADAMS
(after of know how program with ADAMS, very fast develops!) the problem is that the ADAMS language is not easy!!
2. Programming with Matlab: Is better, but is necessary to have a very good acknowledges on multibody dynamics!! and to have some experts in the group!
3. For real time RT, we works in multibody dynamics for RT: we used OOD, C++ + UML + RTLinux.

1.19Universidad Politécnica de Madrid
Mechanical design and constructionMechanical design and construction
The first prototype: Is necessary to have a PERFECT first experimental prototype??. Usually not!!
In many occasion we need first demonstrate some hypothesis!
In many occasion we need allows that the control and software run!
Really we need a prototype in real scale?? Not, we are sure that in many occasions to
demonstrate the hypothesis and develop computational algorithms is sufficiently to work with scaleable prototypes!!.

1.20Universidad Politécnica de Madrid
……Mechanical design and constructionMechanical design and construction
A case. We are developing an underwater parallel
robot We should optimized the useful internal space to
assembly the control and power hardware, because this:
The geometrical form of the robot hull is very complicated
The length of the hull is diffuse because we will need aggregate more hardware in the future
The machining costs can be high if we used an adjusted geometry to the hardware dimensions

1.21Universidad Politécnica de Madrid
……Mechanical design and constructionMechanical design and construction
The solution adopted. We decide use an engineering
plastic with non-hygroscopic performance, soldering and adhesive good properties (many plastics can not solder!!)
The plastic selected is appropriate to machining (for example, we can use joints with mechanical screws)
We use Delrin Acetal plastic (Du Pont)
The plastic weight 1/8 part of the steel!!
The design limit the machining to 2 ½ D
The design is modular We can use adhesives Machining with water jet cutting Assembly with mechanical
screws + GORE Tex seals and adhesives

1.22Universidad Politécnica de Madrid
Hardware and controlHardware and control
In many applications is sufficiently with the next hardware architecture: Based on PC-104 + RS 485
LAN + Ethernet Multiaxis control base on
multipoint RS-485 Duplex Network to 115200 Bps.
Capacity to control many axis (256)
Develop below QNX real time system or RT Linux
Flash SD memory (2 G) And the better!!: less of 1000
eur We used this card to control a S-G
parallel robot with 12 Step servomotors.
We used Stepper motors to avoid used encoder and its electric cables
The servomotors power and control hardware are prepared to connect in Network (Duplex RS-485) !!!
PC compatible Single Board Computer with 133 MHz AMD 586 processor.32-64 MB SDRAM 10/100 Ethernet PCMCIA socket Compact Flash socket Optional A/D & DAC 2 COM ports 23 DIO PC/104 expansion bus 2 MB Flash drive Technologic Systems, Incorporated16610 East Laser Drive, Suite 10Fountain Hills, AZ 85268480-837-5200FAX [email protected]://www.embeddedx86.com/