Embed Size (px)
Citation preview
Curso de Engenharia Mecânica – Automação e Sistemas
PROJETO E CONSTRUÇÃO DE UM MANIPULADOR
ARTICULADO (ANTROPOMÓRFICO) COM 3 GRAUS DE
LIBERDADE
Carlos Rodrigo Davelli
Itatiba – São Paulo – Brasil
Novembro de 2004
ii
Curso de Engenharia Mecânica – Automação e Sistemas
PROJETO E CONSTRUÇÃO DE UM MANIPULADOR
ARTICULADO (ANTROPOMÓRFICO) COM 3 GRAUS DE
LIBERDADE
Carlos Rodrigo Davelli
Monografia apresentada à disciplina Trabalho de Conclusão de Curso, do Curso de Engenharia Mecânica – Automação e Sistemas da Universidade São Francisco, sob a orientação do Prof. Ms. Paulo Eduardo Silveira, como exigência parcial para conclusão do curso de graduação. Orientador: Prof. Ms. Paulo Eduardo Silveira
Itatiba – São Paulo – Brasil
Novembro de 2004
iii
PROJETO E CONSTRUÇÃO DE UM MANIPULADOR
ARTICULADO (ANTROPOMÓRFICO) COM 3 GRAUS DE
LIBERDADE
Carlos Rodrigo Davelli
Monografia defendida e aprovada em 01 de Dezembro de 2004 pela Banca
Examinadora assim constituída:
Prof. Ms. Paulo Eduardo Silveira (Orientador)
USF – Universidade São Francisco – Itatiba – SP.
Prof. Ms. Fernando Cezar Gentile (Membro Interno)
USF – Universidade São Francisco – Itatiba – SP.
Prof. Ms. Guilherme Bezzon (Membro Interno)
USF – Universidade São Francisco – Itatiba – SP.

iv
Epigrafe
Os problemas existem para serem solucionados.
Cada problema solucionado torna a vida mais
luminosa. Enquanto enfrenta a dificuldade, a
maioria das pessoas se apavora, encarando esta
dificuldade como se fosse um inimigo; mas ele é
na verdade um esmeril para polir as boas
qualidades existentes no interior das pessoas, tal
qual pedras preciosas.
(Massaharu Taniguchi)
v
Dedicatória:
.
A meus pais José Carlos Davelli e Ana
de Fatima Cruz Davelli, sem os quais
não chegaria até aqui.
A minha Irma Silvana que sempre esteve
ao meu lado me dando valiosos
conselhos.
A minha Noiva Luciana a quem sempre
me deu forças e apoiou-me.
Sou eternamente grato a todos.
vi
Agradecimentos:
Agradeço primeiramente ao Professor Paulo Eduardo Silveira , meu orientador, que
acreditou em mim e incentivou-me para a conclusão deste trabalho, face aos inúmeros
percalços do trajeto, no qual foi um grande orientador e amigo.
Agradeço também ao Professor Fernando Gentile, um companheiro de percurso e de
discussões profícuas, dentro e fora do contexto deste trabalho, agraciando-me incontáveis
vezes com sua paciência, conhecimento e amizade.
Alguns experimentos e vários “entendimentos” não teriam sido possíveis sem a
colaboração de Guilherme Bezzon, um grande professor.
Eu agradeco fraternalmente a todos que diretamente ou indiretamente me ajudaram na
realizacao deste trabalho.
vii
Epígrafe..........................................................................................iv
Dedicatoria......................................................................................v
Agradecimentos ............................................................................vi
Resumo.................................................................................................viii
1 ...................................................................................... Introdução 1
1.1 .......................................................................................................................................... 1.2 .......................................................................................................................................... 1.3 .......................................................................................................................................... 1.4 .......................................................................................................................................... 1.5 ..........................................................................................................................................
2................................................................................... Continuacao
2.1 .......................................................................................................................................... 2.2 .......................................................................................................................................... 2.3 .........................................................................................................................................
2.4... ..... ................................................................................................................................ 2.5... .... ................................................................................................................................. 2.6... ..... ................................................................................................................................ 2.7.. ..... ................................................................................................................................. 2.8........... ............................................................................................................................... 2.9... .... .................................................................................................................................
3................................................................................. Continuacao3
3.1 .......................................................................................................................................... 3.2 ..........................................................................................................................................
3.3.. ............................................................................................................................................ 3.4........................................................................................................................................ 3.5........................................................................................................................................ 3.6........................................................................................................................................
3.7.......... ................................................................................................................................ 3.8........................................................................................................................................ 3.9........................................................................................................................................
4...................................................................................... Conclusão xx

viii
Referências Bibliográficas ..........................................................xx
ix
Resumo
Um problema que tem dificultado os avanços da robótica é a tarefa de criar
mecanismos que possam reproduzir precisamente as operações humanas em uma
máquina. Quanto melhor um robô ter capacidade para avaliar os eventos no seu
ambiente, mais autônomo ele se tornará. Atualmente os sensores utilizados nos
robôs estão limitados a cinco tipos: táctil, distância, proximidade, acústica e visual.
Este trabalho descreve o projeto, a modelagem do braço mecânico em CAD e
construção de um braço mecânico do tipo antropomórfico com três graus de
liberdade que deverá ter seus movimentos controlados através de um
microcomputador, utilizando somente sensores de posição. O sistema completo
contém ainda uma unidade de controle de posição com realimentação para cada um
dos graus de liberdade. Os sensores de posição são potenciométricos rotativos e
são utilizados atuadores do tipo motorredutor de corrente contínua em cada uma das
juntas. Pretende-se com este projeto obter um manipulador robótico de baixo custo
para auxiliar no ensino de robótica industrial e sistemas de controle em cursos de
engenharia.
PALAVRAS-CHAVE: Braço Mecânico
x
ABSTRACT:
The problem that has made it difficult the advances of the robotics is the task to create
mechanisms that can reproduce the operations necessarily human beings in a machine. How
much better a robot to have capacity to evaluate the events in its environment, more
independent it will become. Currently the sensors used in the robots are limited the five types:
táctil, distance, proximity, acoustics and appearance. This work describes the project, the
modeling of the mecanico arm in CAD and construction of a mechanical arm of the
antropomorphus type with three degrees of freedom that must have its controlled movements
through a microcomputer, only using sensory of position. The complete system still contains a
control unit of position with feedback for each one of the degrees of freedom. The position
sensors are potenciométricos rotating and are used actuators of the direct-current motorredutor
type in each one of the meetings. It is intended with this project to get a robotic manipulator
of low cost to assist in the education of industrial robotics and systems of control in
engineering courses.
1
INTRODUÇÃO
Princípios da Robótica
Desde o começo dos tempos, o homem foi aproveitando tudo o que a natureza
colocou ao seu redor. Assim, para facilitar seu trabalho empregou diversas espécies animais,
tais como bois, cavalos, burros, cães, gatos e outros. A competição feroz dos nossos tempos
exige o aumento da produtividade, o que obriga a substituir os animais por máquinas e
comandos. Os robôs atuais são resultado da reunião de necessidades, idéias e trabalhos, cada
qual de procedência muito variada, podendo-se agrupá-los em três grandes blocos:
- Imaginação;
- A necessidade de automação;
- A experiência científica;
A imaginação tem um componente lúdico especial referente à idéia, sempre latente
no homem, de criar, imitando a natureza, em geral, e reproduzindo o comportamento do
homem, em particular. Assim, os autômatos, alguns dos quais podem ser encontrados nos
museus, podem ser considerados antepassados dos Robôs. Quase todos construídos por
“mecânicos de precisão” da época, especialmente relojoeiros, que os faziam para satisfação
própria ou por diversão da nobreza.
A idéia, a nível popular, sobre os robôs é que eles são máquinas com comportamento
humano, o que se deve aos livros e filmes de ficção científica. E até o nome robô tem essa
origem; seu criador foi o escritor tcheco Karel Capek, primeiro na sua obra Opilek, e três anos
depois, em 1920, na conhecida obra de teatro R.U.R. Rossum’s Universal Robots. Nela, um
homem fabricava máquinas com forma humana, para que servissem como escravos, e
2
denominava-as de robots que, no tcheco é robota significando escravo.A necessidade de
automação é um segundo fator que deu origem aos robôs. Aqui podemos apresentar as
técnicas fundamentais:
1ª A estrutura mecânica, baseada em vários corpos articulados entre si foi motivada pelos
telemanipuladores que adquiriram grande relevância na indústria.
2ª O controle dos movimentos que seguiu os passos das máquinas ferramenta com controle
numérico. Estas integravam, em seu funcionamento, a forma de programação.
A investigação e a experimentação científica compõe o terceiro bloco que deu
origem aos robôs. Sua importância na evolução destes é muito grande, pois as máquinas que
se podem chamar de robôs, são o resultado do extraordinário interesse dos cientistas em
experimentar suas teorias e reproduzir determinadas características do homem.
Os robôs simplesmente apareceram em 1961, quando a General Motors comprou um
robô chamado Unimate para realizar serviços de fundição em molde. Ele podia aprender e
realizar 180 passos, mas era pouco mais do que um braço mecânico. Um controlador humano
guiava o robô em cada um dos passos, e o robô gravava cada um deles. Depois que os passos
estavam gravados, o Unimate iria reproduzi-los através da sua memória. No meio dos anos
60, cientistas de Stanford, MIT e SRI International começaram a realizar experiências com
robôs que incorporavam inteligência artificial e câmeras de TV para guiar os seus braços.
Depois de muito refinamento, estes novos robôs eram capazes de montar itens como a bomba
de água de um automóvel. Nos anos 70, os robôs já possuíam alguma credibilidade, mas foi
somente nos anos 80 que eles se estabeleceram, a indústria automobilística descobriu que os
robôs podiam substituir os humanos em muitas tarefas cansativas e perigosas.
3
Em 1997 a NASA enviou até Marte o seu Robô, Mars Path Finder, que tinha o objetivo de
fazer investigações da geologia e morfologia da superfície daquele Planeta, e a centenas de
metros abaixo do solo, a geo-química e petrologia do solo e das rochas, as propriedades
magnéticas do solo, tal como as propriedades magnéticas da poeira.
Classificação de Robos.
Existem basicamente dois métodos de classificação de robôs. Um considera os seus
atributos físicos ou geométricos, enquanto o outro refere-se ao modo no qual eles são
controlados, no nosso caso a classificação foi baseada em atributos geométricos.
Classificação Geométrica
Os manipuladores podem apresentar diferentes configurações geométricas, isto é,
diferentes arranjos entre os membros e os tipos de juntas utilizadas. A maioria dos robôs
industriais tem 6 ou menos graus de liberdade. No caso de um manipulador com seis graus de
liberdade, os três primeiros graus (a contar da base) são usados para posicionar o órgão
terminal no espaço 3D, enquanto que os três últimos servem para orientar o órgão terminal no
espaço 3D. Em princípio, o Braço mecânico construído possui 3 graus de liberdade (RRR)
para alcançar qualquer ponto no espaço. Entretanto, ele poderá Ter 3 GDL adicionais para
manusear um objeto no espaço.Com base nos três primeiros graus de liberdade, pode-se
classificar os robôs industriais em cinco configurações geométricas:
• Cartesiano (ou retangular) – geometria (x, y, z)
• Cilíndrico (ou tipo poste) – geometria (r, θ, z)
• Esférico (ou tipo polar) – geometria (r, θ, φ)
• Articulado (ou antropomórfico) – geometria (θ1, θ2, θ3 )
• Scara (RRP)
4
Classificação de Controle
Pode-se também classificar os robôs de acordo com o método de controle utilizado,
desse modo, pode-se ter robôs com controle em malha aberta, que são os mais antigos,
cujos movimentos são limitados pôr batentes mecânicos. Assim, pôr exemplo, quando o braço
mecânico encontra um batente que limita o seu movimento, esse batente pode acionar um
interruptor que desligará o motor da junta e ligará o motor de uma outra junta e assim por
diante, até completar o ciclo desejado.
Já os robôs modernos são robôs com controle em malha fechada, ou servo-robôs, os quais
usam um controle computadorizado com realimentação para monitorar o seu movimento. Os
servo-robôs, pôr sua vez, são classificados de acordo com o método que o controlador utiliza
para guiar o órgão terminal em robôs ponto a ponto (ou robôs PTP, do inglês "point-to-point")
e robôs de trajetória contínua (ou robôs CP, do inglês "continuous path"). Ao robô PTP é
programado um conjunto de pontos discretos (normalmente através de um TP, o "Teach
Pendant" controle do tipo joystick usado pelo operador), porém não há controle sobre a
trajetória que o órgão terminal deve seguir entre dois pontos consecutivos. As coordenadas
dos pontos são armazenadas e o órgão terminal passa por eles sem controle sobre a trajetória.
Tais robôs são muito limitados em suas aplicações. Já no robô CP toda a trajetória pode ser
controlada. Pôr exemplo, pode ser ensinado ao robô que o seu órgão terminal deve seguir uma
linha reta entre dois pontos ou mesmo uma trajetória mais complicada como numa operação
de soldagem a arco. Pode-se, também, controlar a velocidade e/ou a aceleração do órgão
terminal. Obviamente, os robôs CP requerem controladores e programas mais sofisticados do
que os robôs PTP.
5
Características:
Precisão e Repetibilidade.
A precisão do manipulador é uma medida de quão próximo o órgão terminal pode
atingir um determinado ponto programado, dentro do volume de trabalho. Já a repetibilidade
diz respeito a capacidade do manipulador retornar várias vezes ao ponto programado, ou seja,
é uma medida da distribuição desses vários posicionamentos em torno do ponto programado.
A precisão e a repetibilidade são afetadas pôr erros de computação, imprecisões
mecânicas de fabricação, efeitos de flexibilidade das peças sob cargas gravitacionais e de
inércia (sobretudo em altas velocidades), folgas de engrenagens, etc.
Um outro fator que influencia grandemente a precisão e a repetibilidade é a resolução
de controle do controlador. Entende-se pôr resolução de controle o menor incremento de
movimento que o controlador pode "sentir". Obviamente, se a junta for prismática, o
numerador da equação será um deslocamento linear, enquanto que se a junta for rotativa, será
um deslocamento angular. Nesse contexto, juntas prismáticas proporcionam maior resolução
que juntas rotativas, pois a distância linear entre dois pontos é menor do que o arco de
circunferência que passa pêlos mesmos dois pontos.
Aplicações do Braço Mecânico.
O tipo mais básico deste papel para o robô é nas operações de pegar-colocar. O robô
também pode ser usado no carregamento e descarregamento de máquinas. Operações de
manuseio de materiais podem incluir pegar-colocar e também aquelas operações relacionadas
à paletização. O layout da célula pode ser tal que as peças sejam apresentadas pôr alguns
6
dispositivos de alimentação (p.ex. esteira) numa localização especificada. A operação pegar-
colocar pode variar do caso em que a localização é fixa, até a situação onde o robô deve
rastrear uma peça em movimento numa esteira. Em cada caso, a operação envolve o robô
segurando a peça usando a garra e movimentando a peça para outra localização.
Em operações de paletização, o robô deve pegar peças e empilhá-las sobre o pallet num
certo padrão. O robô pode carregar peças ou objetos num container e o mesmo pode carregar
o container sobre o pallet. A despaletização consiste no processo inverso e robôs são
adequados para esse tipo de atividade, especialmente porque ela envolve nenhuma habilidade
humana para ser efetuada, e são portanto enfadonhas. Carregamento e descarregamento de
máquina refere-se à categoria de manuseio de materiais onde o robô move as peças de/para
uma máquina. Pôr exemplo, na usinagem, um robô pode carregar a matéria-prima na máquina
e removê-la da máquina quando a operação for completada. O robô pode também carregar
outros componentes nas máquinas, e alguns exemplos desses processos incluem: injeção de
plásticos, fundição sob pressão, forjamento, estampagem, etc. Em cada um desses casos,
robôs têm sido aplicados para poupar os homens de tarefas repetitivas, sujas, desagradáveis ou
perigosas.
Projeto:
Desenvolvimento do Projeto
Adotou-se um braço mecânico antropomórfico com 3 graus de liberdade por Ter grande
aplicação na industria e ser adequado ao ensino de robótica (fig.9), sendo 3 juntas tipo RRR,
descritas como um braço com 170,5mm um antebraço de 145mm e um ombro de 50mm entre
centros. Estas medidas foram adotadas por serem facilmente usinadas em Acrílico. O acrílico
foi o material escolhido por ter como característica sua transparência, sendo assim teríamos
condições de visualizar todas as partes do robô em movimento
7
Descrição das partes do Braço Mecânico Construído:
O robô proposto consiste das seguintes partes: A) Uma base inferior com um dos
motores para ao acionamento da rotação e onde a mesma irá suportar todo o peso do braço
mecânico B) Uma base superior com dois motores elétricos para o acionamento das
articulações que compõem o restante do braço C) Laterais de movimentação, que compões as
juntas de movimentação do mesmo D) Circuito de controle, onde o mesmo será responsável
pelo controle de movimento do robô.
Dados do desenvolvimento.
O manipulador robótico é compostos pôr membros conectados pôr juntas em uma
cadeia cinemática aberta. As juntas são do tipo rotativas (permitem apenas rotação relativa
entre dois membros).
O volume espacial varrido pelo órgão terminal do manipulador é conhecido como
volume de trabalho ou espaço de trabalho e será determinado pelo motor que foi usado
neste projeto. O volume de trabalho depende da configuração geométrica do manipulador e
das restrições físicas das juntas ( limites mecânicos ).
As juntas robótica serão acionadas por atuadores elétricos ( moto-redutores ) que
determinaram a capacidade de carga do robô mediante ao torque que será exigido no projeto
e também a velocidade do mesmo. Os atuadores elétricos são os mais utilizados
industrialmente, principalmente pela disponibilidade de energia elétrica e pela facilidade de
controle, também poderíamos ter escolhido atuadores hidráulicos que são indicados quando
grandes esforços são necessários, ou atuadores pneumáticos porem este tipo de aplicação

8
geralmente é usado em operações de manipulação em que não são obrigatórias grandes
precisões, devido à compressibilidade do ar.
Analise dos movimentos do Manipulador
Para a realização dos movimentos do braço mecânico: foi necessário especificar, no
tempo, o valor das correspondentes posições dos eixos de movimento, para que os atuadores
possam acioná-los devidamente, os movimentos: referem-se em geral ao elemento efetuador
terminal, pois é nele que ocorre a interação entre o robô e o objeto manuseado.
Na análise as juntas foram rotuladas por Jn, onde n começa por 1 na base do
manipulador, os elos serão rotulados por Lm, onde m também começa por 1 na base do robô,
como mostra a Fig1.
Analise para o Projeto
Representação da posição da extremidade do braço – Ponto Pw:
a) representação no espaço da junta: utiliza-se os ângulos das juntas
PW = θθθθ1, θθθθ2
L2
L3
J1 J2
L1
Fig1. - Analise das Juntas
9
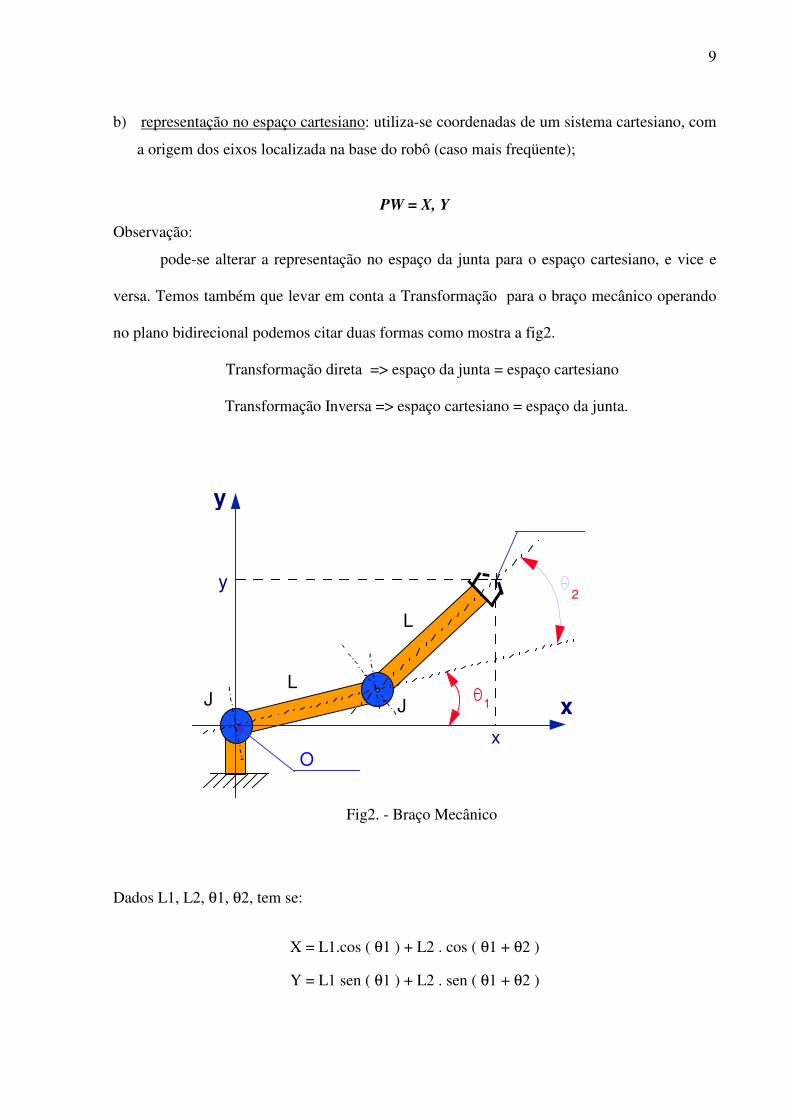
b) representação no espaço cartesiano: utiliza-se coordenadas de um sistema cartesiano, com
a origem dos eixos localizada na base do robô (caso mais freqüente);
PW = X, Y
Observação:
pode-se alterar a representação no espaço da junta para o espaço cartesiano, e vice e
versa. Temos também que levar em conta a Transformação para o braço mecânico operando
no plano bidirecional podemos citar duas formas como mostra a fig2.
Transformação direta => espaço da junta = espaço cartesiano
Transformação Inversa => espaço cartesiano = espaço da junta.
Dados L1, L2, θ1, θ2, tem se:
X = L1.cos ( θ1 ) + L2 . cos ( θ1 + θ2 )
Y = L1 sen ( θ1 ) + L2 . sen ( θ1 + θ2 )
x
y
L1
L2
y
x
J1
J2
2
O(0,0)
1
Fig2. - Braço Mecânico
10
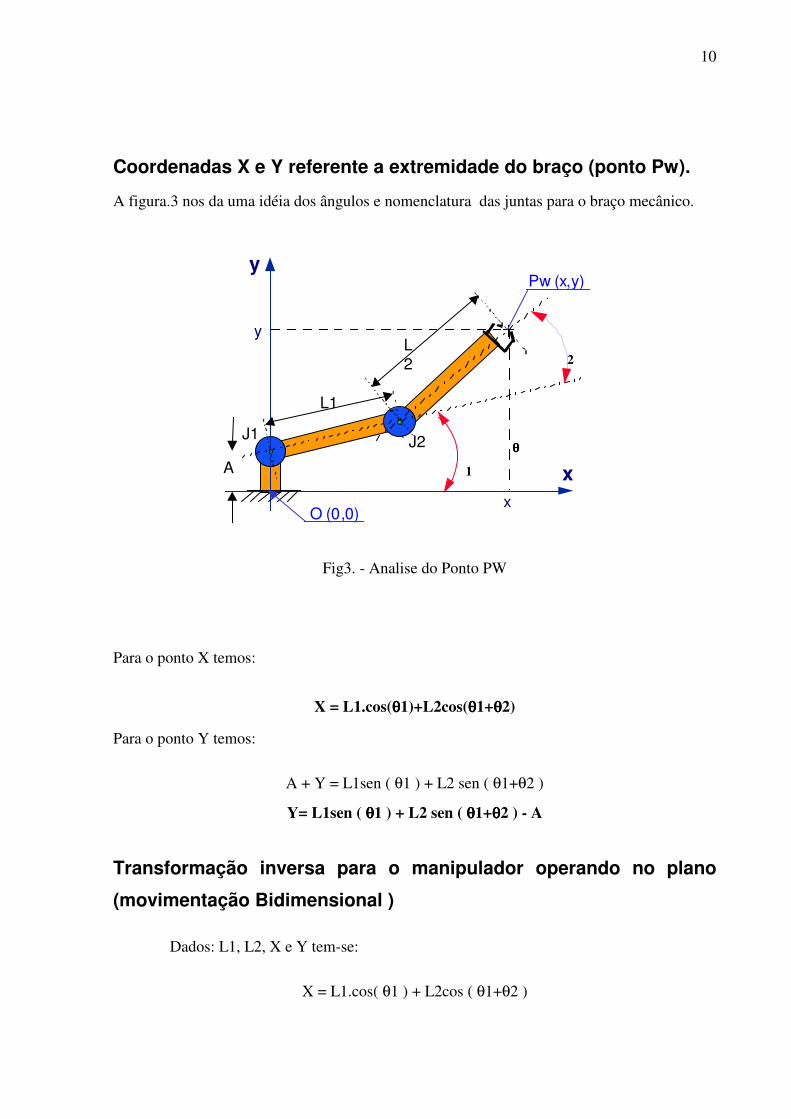
Coordenadas X e Y referente a extremidade do braço (ponto Pw).
A figura.3 nos da uma idéia dos ângulos e nomenclatura das juntas para o braço mecânico.
Fig3. - Analise do Ponto PW
Para o ponto X temos:
X = L1.cos(θθθθ1)+L2cos(θθθθ1+θθθθ2)
Para o ponto Y temos:
A + Y = L1sen ( θ1 ) + L2 sen ( θ1+θ2 )
Y= L1sen ( θθθθ1 ) + L2 sen ( θθθθ1+θθθθ2 ) - A
Transformação inversa para o manipulador operando no plano
(movimentação Bidimensional )
Dados: L1, L2, X e Y tem-se:
X = L1.cos( θ1 ) + L2cos ( θ1+θ2 )
x
y
L1
L2
y
x
Pw (x,y)
J1J2
O (0,0)
A
2
θθθθ
1
11
Y = L1.sen( θ1 ) + L2sen ( θ1+θ2 );
Mas.
cos (a+b) = cos (a).cos (b) - sen (a).sen (b), e
sen (a+b) = sen (a).cos (b) + sen (b).cos (a); logo
X = L1 cos ( θ1 ) + L2 cos ( θ2 ) . cos ( θ2 ) - L2 sen( θ1 ) . sen ( θ2 ) e
Y = L1 sen ( θ1 ) + L2 sen ( θ2 ) . cos ( θ2 ) - L2 Cos( θ1 ) . sen ( θ2 )
Elevando ambos os termos ao quadrado e somando, tem-se:
X² = [L1 cos ( θ1 ) + L2 cos ( θ2 ) . cos ( θ2 ) - L2 sen( θ1 ) . sen ( θ2 )]²
+
Y² = [L1. sen ( θ1 ) + L2 sen ( θ2 ) . cos ( θ2 ) - L2 cos( θ1 ) . sen ( θ2 )]²
Desenvolvendo os termos e simplificando, resulta:
x2 + y2 = L12 + L22 + 2.L1.L2 cos ( θ2 )
Resultando:
θθθθ2 = arcos (x² + y² - L12 – L2
2 / 2 . L1 . L2 )
Para θ1 :
θ1 = β - α tg θ1 = tg (β - α )
tg (β - α ) = tg β - Tag α / 1 + Tag β . Tag α
tg α = L2 Senθ2 / L1+L2 Cosθ2
tgβ = X / Y
Logo;
Tg θ1 = Tg (β - α ) = x/y – (L2senθ2/L1+L2cosL2) / 1 + y/x.(L2senθ2 / L1+L2. cosθ2)
12
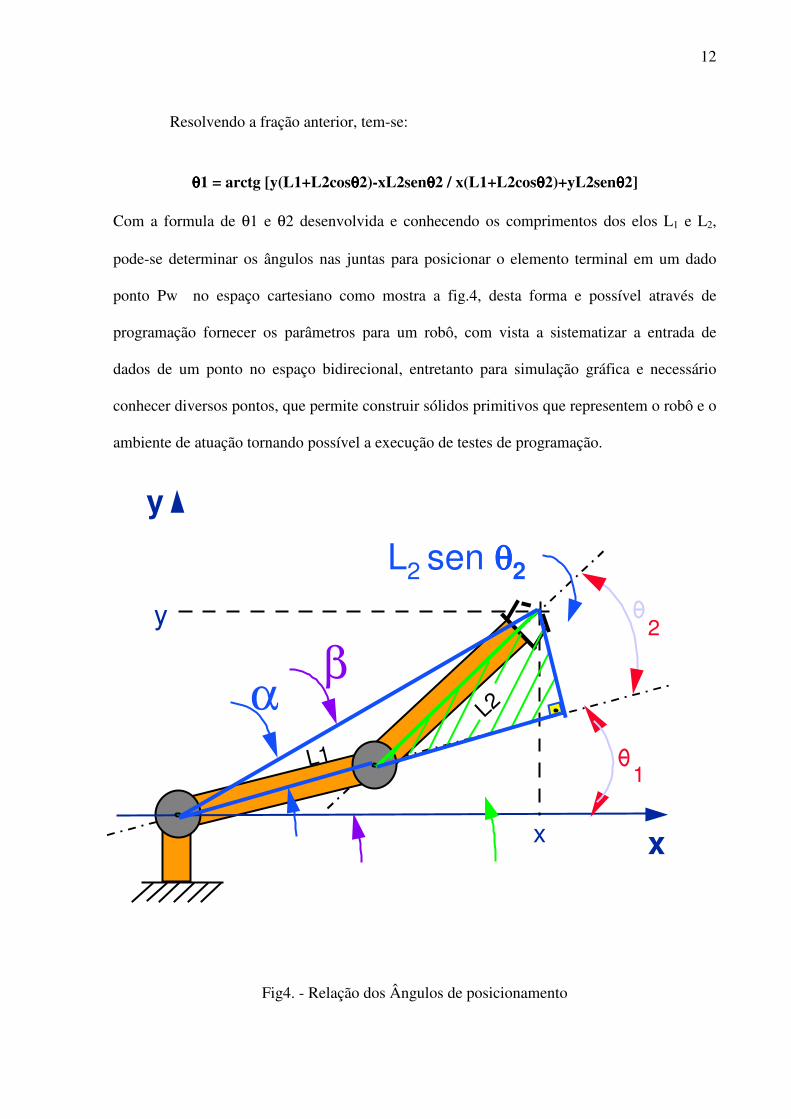
Resolvendo a fração anterior, tem-se:
θθθθ1 = arctg [y(L1+L2cosθθθθ2)-xL2senθθθθ2 / x(L1+L2cosθθθθ2)+yL2senθθθθ2]
Com a formula de θ1 e θ2 desenvolvida e conhecendo os comprimentos dos elos L1 e L2,
pode-se determinar os ângulos nas juntas para posicionar o elemento terminal em um dado
ponto Pw no espaço cartesiano como mostra a fig.4, desta forma e possível através de
programação fornecer os parâmetros para um robô, com vista a sistematizar a entrada de
dados de um ponto no espaço bidirecional, entretanto para simulação gráfica e necessário
conhecer diversos pontos, que permite construir sólidos primitivos que representem o robô e o
ambiente de atuação tornando possível a execução de testes de programação.
Fig4. - Relação dos Ângulos de posicionamento
x
y
L1
L2
y
x
2
1
α
β
L2 sen θθθθ2
13
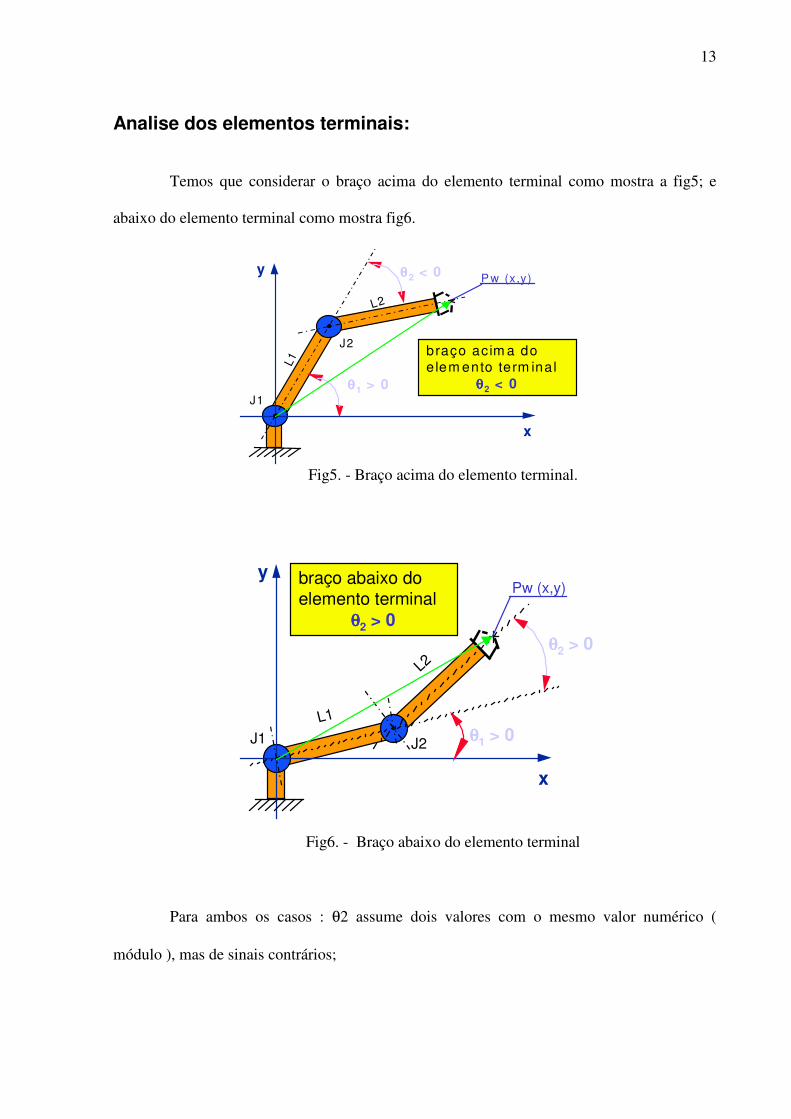
Analise dos elementos terminais:
Temos que considerar o braço acima do elemento terminal como mostra a fig5; e
abaixo do elemento terminal como mostra fig6.
Fig5. - Braço acima do elemento terminal.
Fig6. - Braço abaixo do elemento terminal
Para ambos os casos : θ2 assume dois valores com o mesmo valor numérico (
módulo ), mas de sinais contrários;
x
yL1
L2
Pw (x,y)
J1
J2
θθθθ 1 > 0
θθθθ 2 < 0
braço ac im a do
elem ento term inal
θθθθ2 < 0
y
x
L1
L2
Pw (x,y)
J1 J2
θθθθ2 > 0
θθθθ1 > 0
braço abaixo do
elemento terminal
θθθθ2 > 0
14
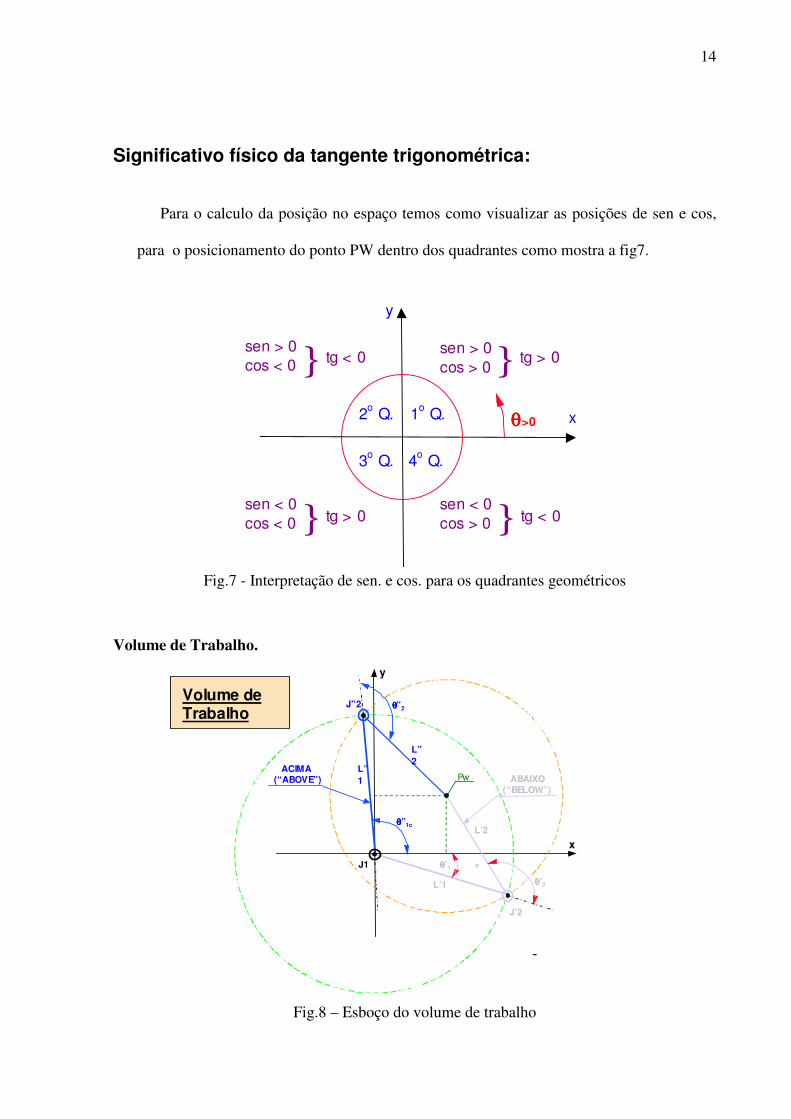
Significativo físico da tangente trigonométrica:
Para o calculo da posição no espaço temos como visualizar as posições de sen e cos,
para o posicionamento do ponto PW dentro dos quadrantes como mostra a fig7.
Fig.7 - Interpretação de sen. e cos. para os quadrantes geométricos
Volume de Trabalho.
Volume deTrabalho
-
PwL”1
L’2
J’2
o
J”2
J1
L”2
L’1
θθθθ’1
θθθθ’2
x
y
θθθθ”2
ABAIXO(“BELOW”)
ACIMA(“ABOVE”)
θθθθ”1c
Fig.8 – Esboço do volume de trabalho
2o Q. 1
o Q.
4o Q.3
o Q.
sen > 0
cos > 0 } tg > 0sen > 0
cos < 0 } tg < 0
sen < 0
cos < 0 } tg > 0sen < 0
cos > 0 } tg < 0
x
y
θθθθ>0
15
Com os cálculos de θ1 e θ2, e com os comprimento dos braços temos como fazer um
esboço do da trajetória ou volume de trabalho para o braço mecânico em questão, pois desta
forma temos como analisar a trajetória do mesmo como mostra a fig8.
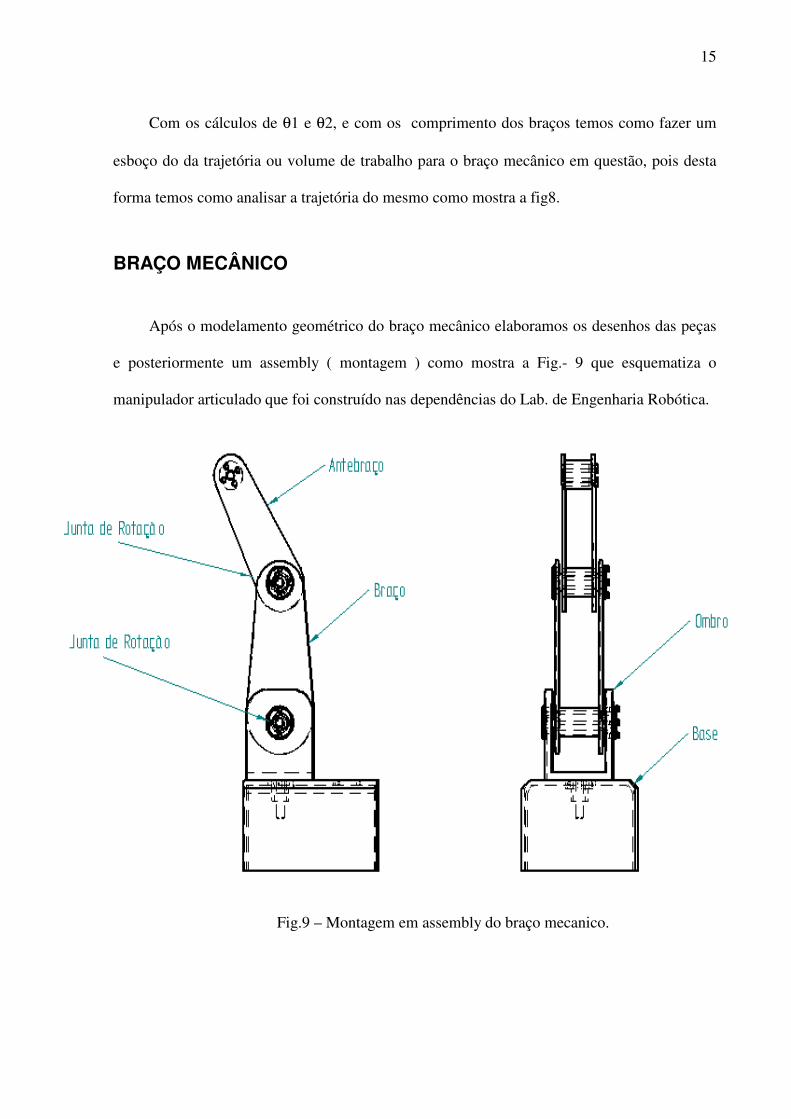
BRAÇO MECÂNICO
Após o modelamento geométrico do braço mecânico elaboramos os desenhos das peças
e posteriormente um assembly ( montagem ) como mostra a Fig.- 9 que esquematiza o
manipulador articulado que foi construído nas dependências do Lab. de Engenharia Robótica.
Fig9. Robô articulado de 3 eixos rotacionais
Fig.9 – Montagem em assembly do braço mecanico.
16
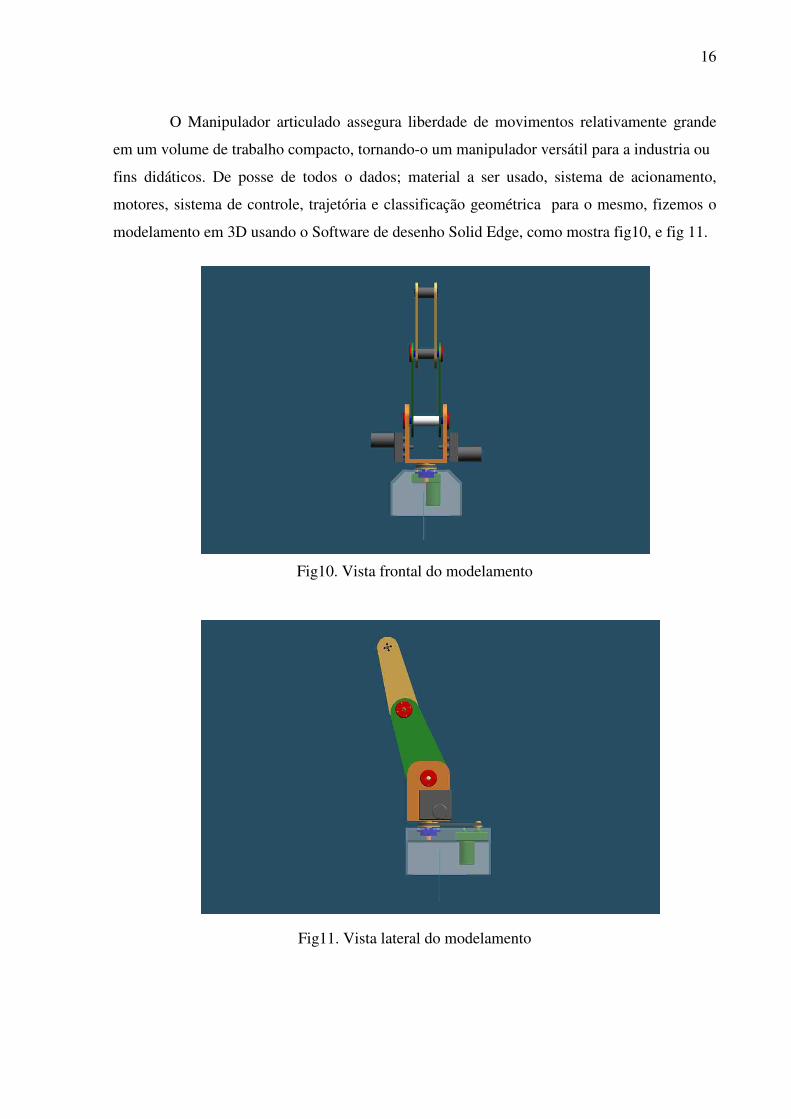
O Manipulador articulado assegura liberdade de movimentos relativamente grande
em um volume de trabalho compacto, tornando-o um manipulador versátil para a industria ou
fins didáticos. De posse de todos o dados; material a ser usado, sistema de acionamento,
motores, sistema de controle, trajetória e classificação geométrica para o mesmo, fizemos o
modelamento em 3D usando o Software de desenho Solid Edge, como mostra fig10, e fig 11.
Fig10. Vista frontal do modelamento
Fig11. Vista lateral do modelamento
17
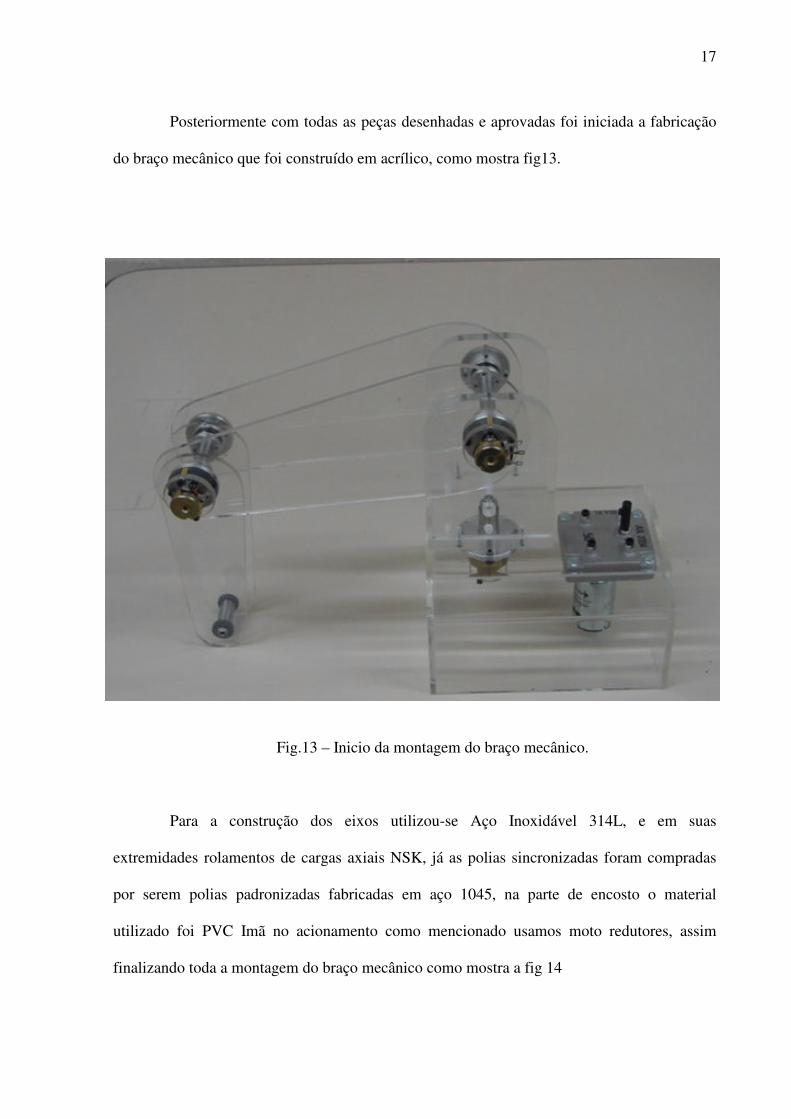
Posteriormente com todas as peças desenhadas e aprovadas foi iniciada a fabricação
do braço mecânico que foi construído em acrílico, como mostra fig13.
Fig.13 – Inicio da montagem do braço mecânico.
Para a construção dos eixos utilizou-se Aço Inoxidável 314L, e em suas
extremidades rolamentos de cargas axiais NSK, já as polias sincronizadas foram compradas
por serem polias padronizadas fabricadas em aço 1045, na parte de encosto o material
utilizado foi PVC Imã no acionamento como mencionado usamos moto redutores, assim
finalizando toda a montagem do braço mecânico como mostra a fig 14

18
Fig.14 – Braço mecânico com sua montagem finalizada
Sistema de Acionamento
O sistema de acionamento será responsável pela conversão e transmissão da potência
necessária para todos os eixos de movimentação que estarão ligados diretamente ou através de
polias / correias a um moto-redutor elétrico.
Sistema de Controle
O sistema de controle irá atuar como uma seqüência lógica para o programa de
operação. Ele fornece os valores requeridos para cada passo do programa, e mede
continuamente a posição real durante o movimento, e processa a diferença entre o valor
desejado e o real.
19
Controlador
O controlador é normalmente um microprocessador ou um computador e possui as
seguintes funções:
• Realimentação: Dada a posição real e/ou velocidade do atuador, ele determina o sinal de
acionamento apropriado para mover o atuador para a posição desejada.
• Cinemática: Dada o estado real dos atuadores (posição e velocidade), ele determina o
estado real da garra. Da mesma forma, dado o estado real da mão, determina o estado
desejado de cada atuador.
• Dinâmica: Dadas as cargas no braço (inércia, atrito, gravidade, aceleração), ele usa essas
informações para ajustar a operação de realimentação para atingir um melhor
desempenho.
• Análise das atividades através de sensores: Dado o conhecimento das tarefas a serem
executadas (p.ex. o aperto de uma porca), ele determina os comandos apropriados de
movimento do robô. Isto pode ser feito através de técnicas de visão e de tato, ou
medindo-se e compensando-se as forças aplicadas na garra.
Sensores
Sensores irão permitir que o braço mecânico trabalhe com seus ambientes numa maneira
adaptativa e inteligente. Existem inúmeros transdutores disponíveis que medem as variáveis
físicas mais importantes da manufatura. Dentre os diferentes sensores; tem-se: de visão, táteis,
de proximidade, ultra-sônicos, sensores de carga, etc. Para o Braço mecânico que foi
construído, o sensor de posição que iremos utilizar são do tipo potenciômetricos, que serão
responsáveis pelas variáveis de posicionamento do braço mecânico.
20
Conclusão.
Percebemos que o tempo de usinagem do acrílico foi relativamente grande, por se tratar
de um material frágil, os avanço e profundidades de corte tiveram de ser reduzidos para evitar
a quebra ou derretimento das pecas que eram refrigeradas com álcool, todo o conjunto teve de
ser protegido com plástico bolha na hora da montagem e usinagem para evitar possíveis riscos
ou trincas na hora da fabricação.
A cola utilizada no projeto foi uma mistura de pó de acrílico com éter, dando uma
característica de material fundido após aplicação, com isso conseguimos uma boa resistência
mecânica e bom acabamento nas partes coladas, porem é uma mistura bastante toxica tendo
que ter um cuidado redobrado no manuseio da mesma. As correias foram posicionadas de
maneira a dar uma boa tração nas polias não ocasionando o aumento indevido na amperagem
dos motores do robô e nem a deformação nas laterais do conjunto. A movimentação do braço
do manipulador interfere o movimento do antebraço ou seja, reposicionando o mesmo, pois
desta forma o controlador será responsável pela correção desta trajetória. O robô que foi
construído, tende-se a ser muito eficiente, atingindo todos os objetivos previstos. A utilização
de moto-redutores elétricos tornou-se conveniente a esse tipo de aplicação, permitindo
diretamente o controle digital através de um computador. A programação lógica pode ser
desenvolvida off-line com a efetiva facilidade de depuração e simulação de movimentos
tornando-se rápida e fácil para o operador, destacando que se trata de um equipamento de
pequeno porte permitindo um fácil transporte e baixo investimento.
21
Referências Bibliográficas
Paul, R. P. Robot Manipulators: mathematics, programming and control. Massachussets, the
Mit Press, 1981.
Rosario, J. M. Princípios de Mecatrônica / João Maurício Rosário. São Paulo : Prentice Hall,
2005.
Kuo, B. C. Sistemas de Controle Automatico. Rio de Janeiro: Prentice Hall do Brasil, 1982.
Romano, V. et al. Robotica industrial: aplicacao na industria de manufatura e processos.
Brasilia: Edgard Blucher, 2002
Trostmam, E. et al. “Robot off-line programming and simulation as true Cime subsystem”.
Massachussets, 1989
Nof, Shimon Y. handbook of industrial robotics. 2 ed. Nova York: Jonh Wiley and Sons,
1999
ABB – Asea Brown Boveri International. ABB Robotics Report,2000