Embed Size (px)
Citation preview

CY3A2 System identification
Modelling Elvis Impersonators
Fresh evidence that pop stars are more popular dead than alive. The University of Missouri’s Jean Gaddy Wilson told a recent press conference in Dallas that, in 1977 when Elvis Died there where 48 professional Elvis impersonators. Today there are 7328. If that growth is projected, by the year 2012 one person in four on the face of the globe will be an Elvis ImpersonatorRoyal Statistical Society News, 1996
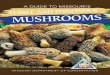
Assume Elvis’s first hit was in 1955 and that the first impersonator started in that year. Assume that there is an exponential growth in elvis impersonators i.e. that the model is of the formEI = exp(b1*year +b0)

CY3A2 System identification
y=Log(EI)=b1*year + b0We can form a matrix of independent variables
We can also form a vector of dependent output variables
The Least squares fit to this is
The prediction for 2012 is then 168110. If Jean Gaddy Wilson is right, either there will be a dramatic drop in world population or growth of Elvis Impersonators is more dramatic than an exponential model will allow.
11996
11977
11955
U
TTloglog 595868712307328481 .. )EI( y
TTT ..UUUˆ 5318422216101
y

CY3A2 System identification
1955 1960 1965 1970 1975 1980 1985 1990 1995 20000
1000
2000
3000
4000
5000
6000
7000
8000
9000Prediction of Elvis impersonators
Year
Num
ber
of E
lvis
im
pers
onato
rs

CY3A2 System identification
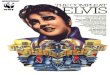
Time series models (ARMAX)General form of the discrete time model used for system identification is the ARMAX model. Autoregressive, Moving Average, Exogeneous inputs. Autoregressive refers to the fact that the output is a linear combination of previous values of the output. Moving Average refers to the noise model. Exogeneous implies that there is an input to the system along with knowledge of its previous values. Thus the model is
isciscii
sbisbiisaisaiii
eececec
ubububyayayay
2211
22112211

CY3A2 System identification
n o i s em o d e l
S y s t e m
uy
The picture is :
Z-1
u i u i-1 Use a delay block

CY3A2 System identification
Z-1
Z-1
Z-1
Z-1
Z- 1
Z-1
Z-1
Z-1
ie
1ie
2ie
3ie
iy
1iy
2iy
iu
1iu
2iu
-
-
+
+++
+
++

CY3A2 System identification
Variants areAutoregressive Moving Average (ARMA) - No access to knowledge of the inputAutoregressive exogeneous (ARX) - Assume that only disturbance is white noise Finite Impulse response (FIR) - Output is a linear combination of only past input values. The output will drop to zero in finite time if the input becomes zero.
Note on z transformWe can use the z transform on the ARMAX model and its variants to specify the z domain transfer function as
sc
sc
sb
sb
sa
sa
iii
zczczc)z(C
zbzbzb)z(B
zazaza)z(A
e)z(Cu)z(By)z(A
2
2
1
1
1
2
2
1
1
1
2
2
1
1
1
111
1
1
where

CY3A2 System identification
L.S. parameter calculation of ARMAX modelsWe can put the general ARMAX model into a vector form for instant i as
For all data values , taken over a range of data i=1, …n, form a vector y , and a matrix Φ values thus all the data can be collected together to form the following
T
T
iiiiiii
T
ii
ccbbaa
eeuuyy
y
212121
212121
where ,
eyey
, ,
e
e
e
,
y
y
y
T
n
T
T
nn
2
1
2
1
2
1

CY3A2 System identification
yTTˆ 1
As you’ve guessed it, at time n the least squares solution to this is
But now add a new input value u and a new output value y and we need to recalculate the entire thing.
Recursive identification methodsWould like a way of efficiently recalculating the model each time we have new data. Ideal form would be
factor correction 1nn
ˆˆ
Thus if the model is correct at time n-1 and the new data at time n is indicative of the model then the correction factor would be zero.

CY3A2 System identification
Advantages of recursive model estimation• Gives an estimate of the model (all be it poor) from the first
time step• Can be computationally more efficient and less memory
intensive, especially if we can avoid doing large matrix inverse calculations
• Can be made to adapt to a changing system, eg online system identification allows telephone systems to do echo cancellation on long distance lines.
• Can be used for fault detection, model estimates start to differ radically from a norm
• Forms the core of adaptive control strategies and adaptive signal processing
• Ideal for real-time implementations

CY3A2 System identification
Example: Estimation of a constant (scalar) model:
n
ii
TT
n
i
i
yn
ˆ
,
y
y
y
,
y
1
1
2
1
1
1
1
1
1
y
y
where ,
yi
i
This is the mean level of the signal, derived by LS method.

CY3A2 System identification
n
iin
T
nn
T
nny
nˆ
1
1 1y
If we introduce a subscript n to represent the fact that n data points are used in deriving the mean, such that
nnn
nn
n
iin
T
nn
T
nn
ˆyn
ˆ
yn
ˆn
n
yn
ˆ
1
1
1
111
1
111
1
11
1
1
1
1y
The above equation is the least squares in recursive form.

CY3A2 System identification
General form of Recursive algorithms
where is a vector of model parameters estimate
is the difference between the measured output and the estimated output at time n
is the scaling - sometimes known as the Kalman Gain
nnnnKˆˆ
1
n
n
nK

![Qb ¹ w Impersonators and audiences share projections · ÔÀп_>E U\Qb ¹ w Impersonators and audiences share projections ( ] ) ! Ê Namiko KUBO -KAWA I ¡%± Ä ¨ ± Û °#](https://img.pdfslide.net/doc/110x75/5ecbc97ef45cbe03cf750601/qb-w-impersonators-and-audiences-share-projections-e-uqb-w-impersonators.jpg)