Embed Size (px)
Citation preview

CAT D10R
Machine Visibilty
Distances wherevisibility lines intersectmachine reference linesA=1mB=2.4m
y
x
w
Machine Reference Pointsy = Machine Centrex = Front Sprocketw = Rear Sprocket
=0.5m
SSSSPILLARD SAFETY SYSTEMSSPILLARD SAFETY SYSTEMS
Area of blind spot
at 1metre high
©2001 Spillard Safety Systems Limited. All Rights Reserved
A
B
14.65m
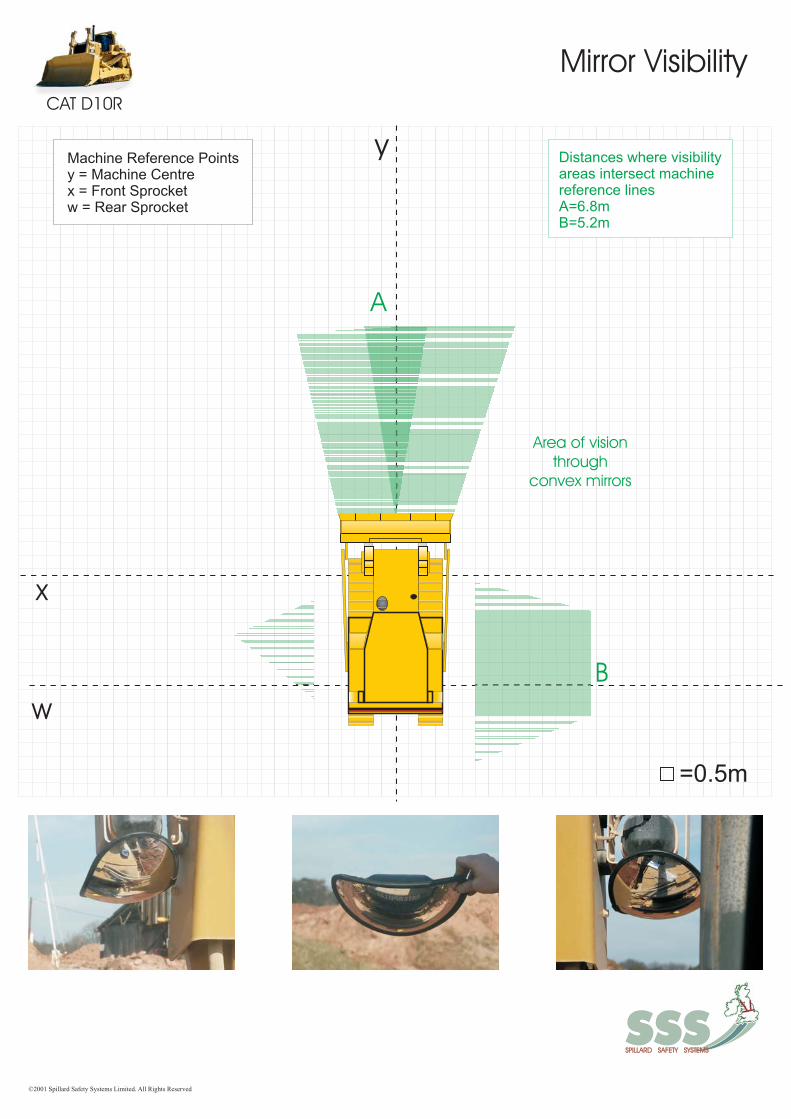
CAT D10R
Mirror Visibility
Distances where visibilityareas intersect machinereference linesA=6.8mB=5.2m
y
x
w
Machine Reference Pointsy = Machine Centrex = Front Sprocketw = Rear Sprocket
=0.5m
SSSSPILLARD SAFETY SYSTEMSSPILLARD SAFETY SYSTEMS
©2001 Spillard Safety Systems Limited. All Rights Reserved
A
B
Area of vision
through
convex mirrors

CAT D10R
Camera Visibility
Distances from blade tofirst view through camera
A=3.6m
y
x
w
Machine Reference Pointsy = Machine Centrex = Front Sprocketw = Rear Sprocket
=0.5m
SSSSPILLARD SAFETY SYSTEMSSPILLARD SAFETY SYSTEMS
©2001 Spillard Safety Systems Limited. All Rights Reserved
Forward Camera Mounted on roof
Area of vision
through
camera system
Area of vision
through
camera system
A

CAT D10R
Enhanced Visibility
y
x
w
Machine Reference Pointsy = Machine Centrex = Front Sprocketw = Rear Sprocket
=0.5m
SSSSPILLARD SAFETY SYSTEMSSPILLARD SAFETY SYSTEMS
Area of blind spot
at 1metre high
©2001 Spillard Safety Systems Limited. All Rights Reserved
14.65m
Area of vision
through
convex mirrors
Area of vision
through
camera system





























