Embed Size (px)
Citation preview

Damping of Inter-Area Power Oscillations in Hybrid AC-DC Power Systems based on Supervisory Control
Scheme Utilizing FACTS and HVDC Melios Hadjikypris, Ognjen Marjanovic, and Vladimir Terzija
Electrical Energy and Power Systems Group The University of Manchester Manchester, United Kingdom
[email protected], [email protected], [email protected]
Abstract—Scope of this paper is to present a design process of a supervisory control scheme that optimally coordinates a parallel operation of FACTS devices and an HVDC link to synchronously counteract inter-area oscillations in a power system. The control system is based on Linear Quadratic Gaussian (LQG) optimal control theory. The scheme provides coordinating control signals to the power electronic devices to coherently damp electromechanical oscillations inherent in the system. The scenarios considered involve transient disturbances, signal time delays and reduced system inertia. The feasibility of the proposed scheme is validated on a two-area network incorporating HVDC link, TCSC and SVC devices. The modelling was performed in MATLAB and DIgSILENT simulation environments. Main outcome from this research is the demonstration of improved performance and robustness measures achieved by the novel control scheme, utilizing flexible transmission assets to effectively damp power oscillations in inter-connected power systems.
Index Terms--Coordinated power oscillation damping control, Linear Quadratic Gaussian (LQG) control, Static Var Compensator (SVC), Thyristor Controlled Series Capacitor (TCSC), Voltage Source Converter (VSC)-High Voltage Direct Current (HVDC).
I. INTRODUCTION The long history of electrical power systems clearly
identifies the inadequate damping of electromechanical oscillations as one of the major causes of cascading events and blackouts [1]. A common practice to mitigate this phenomenon is the implementation of local Power System Stabilizers (PSSs) [2]. When it comes to inter-area oscillatory modes, PSS lack to establish sufficient damping as their local input signals have limited observability of the modes. Recent approaches are based on utilization of Wide Area Monitoring Systems (WAMS), Flexible AC Transmission Systems (FACTS) devices (in this paper TCSC and SVC), and High Voltage Direct Current (HVDC) links. Considerable interest has been drawn by the benefits provided by WAMS based TCSC and SVC devices once appropriately reinforced with supplementary Power Oscillation Damping (POD) action [3]. In addition, the potential of HVDC links to serve as power oscillation damping solutions has been extensively explored [4]. These studies, share the common practice of improved
stability margins gained through the implementation of a single FACTS device or an HVDC link.
A potential risk arises when multiple FACTS devices and HVDC links are integrated under the same scheme with no supervising/coordinating control actions considered amongst them. In that case, the overall system response might not be optimal. As a result, each power electronic device might attempt to individually damp power oscillations ignoring the control status of the rest. This introduces an increasing chance of ineffective/destabilizing interactions taking place between them. Therefore, a non-optimal (under-utilized) performance of the power electronics equipment is established resulting in increasing costs and system wide-area stability deterioration, leaving open possibilities for catastrophic blackouts.
This paper proposes design of a novel supervisory control scheme coordinating a parallel operation of multiple FACTS devices (TCSC and SVC) and HVDC link, distributed across a power system that exhibits a stochastic behavior. The control system is based on Linear Quadratic Gaussian (LQG) modern optimal control theory. The proposed new control scheme provides coordinating/supervising control signals to WAMS based FACTS devices and HVDC link to synchronously counteract inter-area modes of low frequency power oscillations. The feasibility of the proposed scheme is validated on a four-machine two-area test system incorporating Voltage-Source-Converter (VSC)-HVDC link, Thyristor Controlled Series Capacitor (TCSC) and Static Var Compensator (SVC) devices.
II. POWER SYSTEM DYNAMIC MODELLING
A. TCSC A TCSC can be continuously controlled to modify a
transmission line’s reactance and consequently the power flow across the line. It can be adequately represented by the ideal model shown in Fig. 1 [5].
C
AC Line AC Line
L
I IC
IL
Fig. 1. Ideal model of TCSC for system stability studies
This work was supported by the RCUK Energy Programme under the Top & Tail Transformation programme grant EP/I031707/1 (http://www.topandtail.org.uk/).

The model consists of a fixed capacitor C in parallel with a variable reactor L and is used for system stability studies. The small signal dynamics (local control) of TCSC is shown in Fig. 2. The reference reactance TCSCX (35 Ohms) is provided to achieve an expected power flow condition in the line through control of reactance LX , while reactance CX is kept constant. A supervisory control signal SUPX is included to serve as POD action.
C TCSC
C TCSC
X X
X X
⋅+
maxX
minX
11 fsT+
TCSCX+
+Σ LX
( )SUPX Firing circuit delaySupervisory signal Fig. 2. Local control of TCSC
B. SVC A SVC can be continuously controlled to modify reactive
power injection in order to maintain a bus voltage. The ideal model of SVC is shown in Fig. 3, consisting of a fixed capacitor C connected in parallel with a variable reactor L and is used for stability studies [5].
C L
VI
Q Q
Fig. 3. Ideal model of SVC for system stability studies
The small signal dynamics (local control) of SVC is shown in Fig. 4. The deviation between reference refV (230 kV) and measured V voltages is used to determine the necessary adjustments in reactive power output SVCQ , through control of variable reactor to preserve bus voltage. Moreover, a supervisory control signal SUPV is added for POD purposes.
11
a
b
sT
sT
++
maxQ
minQ
11 fsT+
V+−
Σ SVCQ+
refV
Σ+
fixeaQ
K+
( )SUPV Firing circuit delaySupervisory signal Fig. 4. Local control of SVC
C. VSC-HVDC The VSC-HVDC transmission system model utilized in
this study is shown in Fig. 5 [6]. It demonstrates system’s operational mechanism, including internal and external control loops executing pulse width modulation (PWM) actions directly on power converters’ IGBTs gates.
C1
RectifierL1
Reactive Power Controller
Qref
DC VoltageController
Outer Controllers
Inner Current Controller PWM
L2
C2
Qins
Active Power Controller
PVac
PAC 1
Inverter
Reactive Power Controller
AC 2
PWM
Outer Controllers
Inner Current Controller
DC Link
Fig. 5. VSC-HVDC transmission system model
As Fig. 5 suggests, the rectifier is configured for controlling DC link voltage acV (400 kV) and reactive power
recQ (0 MVAr) exchanged between converter and adjacent AC 1 grid. The inverter, on the other hand, is configured for
controlling DC active power P (100 MW) over the DC link and reactive power insQ (0 MVAr) exchanged between converter and adjacent AC 2 grid.
The control principle utilized by VSC-HVDC system is based on vector control methodology [6]. This considers a rotating aq reference frame for AC currents and voltages with the rotational speed that matches the angular frequency of current and voltage phasors 2 )(ω = πf . This allows voltages and currents to appear as constant vectors. Application of this technique permits simplified control loops to be used for adjusting aq currents ai and qi and therefore, system variables such as P , recQ , insQ and acV . Proportional Integral (PI) controllers are considered suitable for generating aq reference currents ref
ai and refqi . This is illustrated in Fig.
6. As can be observed, a supervisory control signal SUPP is considered on the active power control loop to dynamically modulate the active power reference for POD actions.
QQ IP
KK
s+
maxqi
minqi
refrecQ −
+Σ ref
qi
recQ
PP IP
KK
s+
maxai
minai
refP++
Σ refai
P
(c)
(a)−
( )SUPPSupervisory signal
(b)
VacVac IP
KK
s+
maxai
minai
refacV −
+Σ ref
ai
acV
QQ IP
KK
s+
maxqi
minqi
refinsQ −
+Σ ref
qi
insQ (d) Fig. 6. VSC-HVDC control loops: (a) active power (b) DC voltage (c)
reactive power (rectifier) (d) reactive power (inverter)
D. Test Power System The test power system utilized in this work is shown in
Fig. 7. This is a modified version of the well-studied network initially developed for research on power oscillations [2]. It consists of two similar grids each comprising of two coupled units. The two areas are linked by parallel AC corridors realizing high power transmissions (400 MW), with both areas prone to post-disturbance inter-area oscillations. In addition, the system integrates a VSC-HVDC link, TCSC and SVC devices. The full set of original system parameters and dynamic data can be retrieved in [2].
11
7 9
6 10
C1
5G1 1
G2 2
G03
G14
Area 1 Area 2
L1C2
L2
400 MW
25 km10 km 110 km 110 km 10 km
25 kmHVDC linkRectifier Inverter
SVC
TCSC
3
6
8
Fig. 7. Four-machine two-area test power system incorporating a VSC-
HVDC link, TCSC and SVC devices
III. SYSTEM IDENTIFICATION DIgSILENT PowerFactory lacks in providing a linear state
space model of the power network, which is a prerequisite for implementation of LQG control design methodology [7]. Consequently, a subspace state space system identification process [9] is employed for estimating a linear system model from the simulated outputs, in response to appropriate probing signals at the inputs. This has been a common practice for model validation in Western Electric Coordinating Council

(WECC) [8] and other systems. The targeted linear model consists of three control inputs corresponding to the supervisory control signals ( SUPX , SUPV , SUPP ) fed to local FACTS and HVDC controllers, as shown in Fig. 2, 4, 6, and four output signals associated with generators’ speed deviation responses available from WAMS.
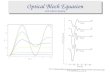
A. Probing Signal Selection of an appropriate probing signal has a significant
impact in system identification. Different probing signals, such as repeated pulses, band-limited Gaussian white noise, Pseudo Random Binary Sequence (PRBS) and Fourier sequence have been reported in literature [9]. Here, PRBS was chosen as the optimal choice due to its richer spectrum [9]. The signal, on every time step, randomly generates one of the two pre-specified binary values by rounding the magnitudes of a complex combination of transcendental functions. The amplitude of selected PRBS is chosen to be high enough to sufficiently excite the critical modes but not to be too high, to prevent pushing the responses into non-linear zones. In addition, the probing sequence of different input channels was ensured to be uncorrelated [9]. Typical PRBS injection signals used during system identification process are shown in Fig. 8.
B. MIMO Subspace System Identification The continuous time state space model of the Multiple
Input Multiple Output (MIMO) system, with m inputs and p outputs, is given in (1):
= + += + +
x x u wy x u v
A BC D
(1)
where ×∈n nA , ×∈n mB , ×∈p nC and ×∈p mD are the system matrices to be estimated, and 1×∈w n , 1×∈v p are non-measureable process and observation noise vectors.
Time [s]
0 2 4 6 8 10 12 14 16 18 20Act
ive
Pow
er [p
.u.]
-0.1
0
0.1Psup: VSC-HVDC
Time [s]
0 2 4 6 8 10 12 14 16 18 20
Vol
tage
[p.u
.]
-0.2
0
0.2 Vsup: SVC
Time [s]
0 2 4 6 8 10 12 14 16 18 20Rea
ctan
ce [O
hms]
-10
0
10 Xsup: TCSC
Fig. 8. Typical PRBS injection signals used during system identification
(the graphs underline the input channels used to accommodate PRBS signals)
In this case, the input vector 3 1×∈u represents the set of PRBS injection signals fed at the three control inputs denoted by “Supervisory signal” ( SUPX , SUPV , SUPP ) shown in Fig. 2, 4, 6. The corresponding output responses 4 1×∈y are the generators’ speed deviations obtained by WAMS. Utilizing the set of input probing signals 1u , 2u , 3u and recorded output signals 1y , 2y , 3y , 4y the matrices A , B , C and D are estimated such that the measurement data resembles a good correlation with the simulated responses from the linear
model. In the process of identifying linear system dynamics, a powerful numerical algorithm for subspace state space system identification was utilized [9]. A model order of 21 was found to accurately capture the non-linear system dynamics, with a fitting percentage of 88.16% to actual measurements, which consisted of 163,830 samples per input or output signal.
C. Model Validation To validate the obtained linear model, modal analysis is
performed on the non-linear system and identified linear model. The results, depicted in Fig. 9, show and compare the dominant electromechanical modes as observed by the non-linear system and linear model. These modes consist of two well-damped (ζ > 5 %) local modes and one poorly damped (ζ < 5 %) inter-area mode. As can be seen, a close correlation between actual and estimated system modes confirms reliability and validity of the identified linear model.
Real Axis [1/s]-0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0
Imag
inar
y A
xis [
rad/
s]
3.5
4
4.5
5
5.5
6
6.5
7
Actual systemLinear model
Damping ratioζ=5%
Local modes
Inter-Areamode
Fig. 9. Electromechanical modes comparison between actual system and
identified linear model (dashed line signifies 5% damping threshold)
Time [s]
30 35 40 45 50Spee
d de
viat
ion
[rad
/s]
10 -5
-1
0
1Vsup
Actual systemLinear model
Time [s]
30 35 40 45 50Spee
d de
viat
ion
[rad
/s]
10 -5
-5
0
5 Xsup
Actual systemLinear model
Time [s]
30 35 40 45 50Spee
d de
viat
ion
[rad
/s]
10 -5
-1
0
1Psup & Vsup
Actual systemLinear model
Time [s]
30 35 40 45 50Spee
d de
viat
ion
[rad
/s]
10 -5
-5
0
5 Psup & Xsup
Actual systemLinear model
Time [s]
30 35 40 45 50Spee
d de
viat
ion
[rad
/s]
10 -5
-5
0
5 Vsup & Xsup
Actual systemLinear model
Time [s]
30 35 40 45 50Spee
d de
viat
ion
[rad
/s]
10 -5
-5
0
5 Psup & Vsup & Xsup
Actual systemLinear model
Fig. 10. Linear model validation with pulse signals fed at different input pairings (the graphs indicate the control input channels used in each case)
In addition, time domain simulations were also performed. In this case, pulses of 1 s duration (starting at 30 s) were applied at the three control inputs ( SUPX , SUPV , SUPP ) individually and in a mixed combination. Fig. 10, presents the simulation results illustrating generator’s 1 speed deviation responses. Once again, a close match between responses from the non-linear system (DIgSILENT) and responses from the linear model (MATLAB) is evident under all scenarios, confirming precision of the estimated linear model.
IV. LQG CONTROLLER DESIGN The LQG control methodology is a cornerstone of modern
optimal control theory and its advantages led to widespread

research in its use in power oscillation damping control [3], [4]. Sometimes, the design approach might not be straightforward when large power systems are considered, with many generators participating in the critical modes. Specifically, challenges arise surrounding the optimal selection of system states upon which to apply controller action. Participation factor analysis is required to determine the dynamic states involved in targeted system modes and then, appropriate weightings can be assigned to these states. If the states are involved in other targeted modes (or modes that do not require altering) the damping of these modes will also be affected, sometimes negatively. This results in a complex and time consuming controller tuning process in which it is often not possible to achieve desired damping ratios. These challenges can be overcome through modal representation of the controller design process. Consider the following state-space power system model [7] described by (2):
= + += + +
x x u wy x u v
ΓA BC D
(2)
where w is process noise and v measurement (sensor) noise. They are usually assumed to be uncorrelated zero-mean Gaussian stochastic processes with constant power spectral density matrices W and V respectively. The Linear Quadratic Regulator (LQR) controller, in the modal formulation concerns devising a feedback control law that minimizes the following cost function (3):
( )( )T T T
0
1lim dm→∞
= +
∫ x x u uT
TJ t
TK E J Q J R (3)
where mQ and R are appropriately chosen weighting matrices such that 0T= ≥m mQ Q and 0T= >R R , and J is a real transformation matrix which provides mapping between system modal variables z and state variables x as in (4):
=z xJ (4)
where modal variables z are directly associated with system modes ( iteλ where 1= i n ). The real transformation matrix J is obtained using Real Schur Decomposition [10] and relates to the matrix of right eigenvectors Φ as 1−=J Φ .
The weighting matrices mQ and R are commonly constructed as diagonal. Values of the diagonal elements of R are set in order to penalize the corresponding controller’s outputs from high actions. Values of the diagonal elements of
mQ are set in order to penalize the corresponding modal variables when deviating from their steady-state values. Each diagonal element in mQ is directly associated with a modal variable zi and hence with the corresponding mode iteλ . A higher value of modal weight corresponds to a higher effort by the controller to stabilize the corresponding mode. In order to focus on adding damping to the modes of interest only, these modes will be given some weights in mQ while the other modes’ weights are set to zero. In this way, control effort of the designed LQR is directed towards the modes of interest only by shifting them to the left in the complex plane, while keeping locations of the other modes unaltered.
Power System
∫
FACTS & HVDC
A
B
C−H
L
x̂Σ Σ
x̂ − ++
+
+
Kalman Filterx̂
LQR
uy
w
Σ
v
+
+
Fig. 11. LQG controller structure combining LQR and Kalman filter
The structure of a standard LQG controller is shown in Fig. 11. The LQG control methodology assumes that the power system is subjected to Gaussian white noise disturbances ( )w . Therefore, it considers a stochastic (i.e. realistic) rather than a deterministic system model. The system outputs are assumed to be contaminated by measurement noise ( )v and are, therefore, fed into the observer (Kalman filter) in order to optimally estimate system states, which are then utilized by the optimal state feedback control law (LQR). The control action for damping of power oscillations is then implemented using FACTS devices and HVDC system. The LQR controller gain H is obtained by solving the associated algebraic Riccati equation (ARE), based on cost function (3), and the final LQG feedback control law is given as (5):
ˆ= −u xH (5)
where x̂ is an estimate of the state x obtained using Kalman filter, shown in Fig. 11, and described by (6):
ˆ ˆ ˆ( )= + + −x x u y xA B L C (6)
where L is the Kalman filter gain. The optimal choice of L is that which minimizes ˆ ˆ{[ ] [ ]}− −x x x xTE . It is calculated by solving the ARE associated with the cost function (7):
( )T T
0
1lim d→∞
= +
∫ x x u uT
TJ t
TL E W V (7)
In this paper, the weighting matrices W and V are tuned using the loop transfer recovery (LTR) procedure applied at the plant input [7]. The Kalman filter is synthesized such that the loop transfer function ( ) ( )LQG s sH G , where ( )sG is the plant open-loop transfer function, approaches the LQR loop transfer function 1( ) ( )LQR
−= −s sH H I A B . The tuning parameters of the Kalman filter are defined as (8):
T T0
0
= +=Γ Γ ΘW W B B
V Vq (8)
where 0W and 0V refer to the nominal model, Θ is any positive definite matrix and q is a constant. Full recovery of robustness is achieved as →∞q . Care is required as full recovery would lead to excessively high gains, which eventually, deteriorate the nominal performance.
Selection of controller input signals is determined through full modal observability assessment of the power system [2]. In this study, generators’ rotor speed deviations (∆ω) were proved to demonstrate the greatest observability of the critical inter-area mode. The number of required input signals depends on the number of critical inter-area modes requiring

additional damping. However, a choice of all four signals 1 4(∆ω ∆ω ) as inputs to LQG controller is decided, to
establish a degree of redundancy for the controller that will build on its robustness against disturbances. The controller’s output signals selection is obtained through full modal controllability assessment of the system [2]. Here, FACTS devices and HVDC link outputs ( TCSCX , SVCQ , HVDCP ) showed the highest controllability on the inter-area mode.
TimeDelay
G1AVR
PSS
Governor
G4AVR
PSS
Governor
PowerNetwork
TCSC
SVC
HVDC Link
Σ
Σ
Σ
Local control
Local control
Local control
LQGSupervisory
Control
Δω1 Δω4
+
+ +
+ +
+
Psup Xsup Vsup
PHVDC
XTCSC
VSVC
WAMS
WAMS
SignalTransport
Delay
PSS
1
4
Fig. 12. Wide-area supervisory control configuration
The power system wide-area control configuration is represented in Fig. 12. A set of selected wide-area signals
1 4(∆ω ∆ω ) is collected and fed into supervisory controller which generates outputs ( SUPP , SUPX , SUPV ) for optimal control of HVDC link and FACTS devices, thereby assisting preservation of the overall power system stability margins and ensuring optimal damping of the power oscillations. Time latencies are considered at the reception of the WAMS based input signals, as the LQG controller is assumed to be centrally located in a control center near bus 8 (see Fig. 7), far from generating units. As a result, time delay is also considered for the transmission of the control signal to HVDC inverter (bus 9), whereas no delays are involved for FACTS devices control as they are (centrally) installed in a close range from supervisory controller.
The LTR process for recovering closed-loop system robustness at the plant input is demonstrated in Fig. 13. In this case, the degree of recovery achieved is assessed through comparison of the singular value plots of ( ) ( )LQG s sH G and
( )LQR sH , for different values of ∈q {0.001, 0.01, 0.1, 1, 10, 100}, while preserving parameter values of Γ , 0W , Θ , and
0V . As can be noticed, increasing q beyond 1 provides no further discernible improvement in recovery of robustness properties. For the rest of the design process, q was fixed at 1 forming an optimal choice between full recovery of robustness properties and unacceptably high filter gains.
Frequency [Hz]
10 -1 10 0 10 1
Gai
n [d
B]
20
30
40
50 KLQR(s)KLQG(s)G(s)
Increasing q = [0.001, 0.01, 0.1, 1, 10, 100]
Fig. 13. LTR process applied at the plant input with varying q values
Fig. 14 provides the modal analysis of the closed-loop system shown in Fig. 12. In this case, the effects of supervisory control scheme on system electromechanical modes as compared with conventional local control, such as AVRs, governors, PSSs and local controls of HVDC, TCSC, and SVC are shown. As can be seen, the targeted inter-area mode experiences a significant improvement in damping, from 1.85% to 11.17%, while local modes remain unaffected by the LQG controller action, and are adequately damped (ζ > 5%). The improvement in inter-area mode damping is ideal and based on LQR state feedback control eigenvalue placement, which assumes full state knowledge. The LQG controller assumes linear system behavior. Therefore, in order to fully assess the performance it is necessary to implement LQG controller to high-fidelity nonlinear model of the power system exposing it to realistic transient simulations.
Real Axis [1/s]-0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0
Imag
inar
y A
xis [
rad/
s]
3.5
4
4.5
5
5.5
6
6.5
7Local control
Supervisory control
Inter-Areamode
Inter-Areamode
Damping ratioζ=5%
Local modes
Fig. 14. System electromechanical modes under local and supervisory
control schemes (dashed line signifies 5% damping threshold)
V. LQG CONTROLLER TRANSIENT PERFORMANCE Non-linear time domain simulations are performed in this
section, to evaluate the transient performance of the novel supervisory controller against various operating conditions.
A. Small Signal Disturbance A small signal disturbance in the form of simultaneous
step change of generators’ mechanical torque of G2 (+0.01 p.u.) and G4 (-0.01 p.u.), at 0.5 s, is initiated to excite the non-linear system dynamics. Fig. 15, presents the generators’ speed deviation responses ( )∆ω to the disturbance under the implementation of local and supervisory control schemes. In addition, Fig. 16 depicts the corresponding inter-area active power flow response to the disturbance (as recorded on line 3), for both control schemes. It is evident, that the supervisory controller demonstrates an improved performance in damping inter-area oscillations with robustness to the disturbance.
Time [s]
0 5 10 15 20G1
Spee
d D
evia
tion
[p.u
.]
10 -4
-1
0
1
2Local control
Supervisory control
Time [s]
0 5 10 15 20G2
Spee
d D
evia
tion
[p.u
.]
10 -4
-2
-1
0
1
2Local control
Supervisory control
Time [s]
0 5 10 15 20G3
Spee
d D
evia
tion
[p.u
.]
10 -4
-2
-1
0
1
2Local control
Supervisory control
Time [s]
0 5 10 15 20G4
Spee
d D
evia
tion
[p.u
.]
10 -4
-2
-1
0
1
2Local control
Supervisory control
Fig. 15. Generators speed deviation responses to the small disturbance

Time [s]
0 2 4 6 8 10 12 14 16 18 20A
ctiv
e Po
wer
[MW
]
79
80
81
82
83
84Local control Supervisory control
Fig. 16. Inter-area (line 3) active power response to the small disturbance
The controller’s reaction in mitigating electromechanical oscillations can be also observed in Fig. 17, which presents the HVDC, TCSC and SVC systems’ outputs under the influence of the supervisory controller. Moreover, it compares the case under local control implementation.
Time [s]
0 2 4 6 8 10 12 14 16 18 20HV
DC
Act
ive
Pow
er [M
W]
99
100
101Local control Supervisory control
Time [s]
0 2 4 6 8 10 12 14 16 18 20
TCSC
Rea
ctan
ce [O
hms]
34
35
36Local control Supervisory control
Time [s]
0 2 4 6 8 10 12 14 16 18 20SVC
Rea
ctiv
ePo
wer
[MV
Ar]
-4
-2
0Local control Supervisory control
Fig. 17. HVDC and FACTS systems output responses to small disturbance
B. Large Signal Disturbance The transient performance of the supervisory controller is
tested against a three-phase short circuit fault initiated on line 6 at 0.5 s, followed by the tripping of the faulted line 100 ms after the fault. Fig. 18, shows the generators’ speed deviation responses to the fault with local and supervisory control.
Time [s]
0 5 10 15 20G1
Spee
d de
viat
ion
[p.u
.]
10 -3
-4
-2
0
2
4Local control
Supervisory control
Time [s]
0 5 10 15 20G2
Spee
d de
viat
ion
[p.u
.]
10 -3
-4
-2
0
2
4Local control
Supervisory control
Time [s]
0 5 10 15 20G3
Spee
d de
viat
ion
[p.u
.]
10 -3
-5
0
5Local control
Supervisory control
Time [s]
0 5 10 15 20G4
Spee
d de
viat
ion
[p.u
.]
10 -3
-5
0
5Local control
Supervisory control
Fig. 18. Generators speed deviation responses to the large disturbance
Time [s]
0 2 4 6 8 10 12 14 16 18 20
Act
ive
Pow
er [M
W]
50
60
70
80 Local control Supervisory control
Fig. 19. Inter-area (line 3) active power response to the large disturbance
Fig. 19, reflects the inter-area active power flow response to the disturbance (as recorded on line 3), under both control schemes. Likewise, the supervisory controller demonstrates an enhanced performance in effectively damping inter-area oscillations. At the same time, it shows uncompromised robustness to the severe fault and immunity to system topology change as a result of the line disconnection.
Time [s]
0 2 4 6 8 10 12 14 16 18 20HV
DC
Act
ive
Pow
er [M
W]
80
100
120
Local control Supervisory control
Time [s]
0 2 4 6 8 10 12 14 16 18 20
TCSC
Rea
ctan
ce [O
hms]
30
40
50Local control Supervisory control
Time [s]
0 2 4 6 8 10 12 14 16 18 20SVC
Rea
ctiv
ePo
wer
[MV
Ar]
-20-10
010
Local control Supervisory control
Fig. 20. HVDC and FACTS systems output responses to large disturbance
The LQG controller’s assertive effort to counteract inter-area oscillations is also evident from Fig. 20, which highlights HVDC, TCSC and SVC systems’ outputs as compared to the case of local control scheme implementation. Finally, it is important to note that the consideration of the supervisory controller has improved the critical clearing time of the power system, which is being increased from 250 ms to 350 ms.
C. Signal Transmission Time Delays Signal time latencies are introduced in the process of
assessing controller’s performance. These are considered at the reception of the input signals ( )∆ω and at the arrival of the control signal ( )SUPP to the HVDC inverter. All signals are assumed to be transmitted over satellite communication channels, and therefore, appropriate time latencies are considered. Fig. 21, manifest the inter-area active power response (as recorded on line 3) to the large disturbance under the implementation of supervisory control scheme considering various time delays −Tse , ∈T {50, 100, 150, 200 ms}. Furthermore, it compares the case of local control implementation without time delays. Studies have shown that the supervisory controller was able to tolerate time delays up to 275 ms, however this case is not represented on the figures.
Time [s]
0 2 4 6 8 10 12 14 16 18 20
Act
ive
Pow
er [M
W]
50
60
70
80Local control T=50ms T=100ms T=150ms T=200ms
Fig. 21. Inter-area (line 3) active power response to the large disturbance considering signal time delays (dashed line: local control, no time delays)
The generators’ speed deviation responses to the large disturbance are provided in Fig. 22, which shows the comparison in performance between supervisory control scheme with signal time latencies of 200 ms, and local control scheme without any time latencies. As can be deduced, the supervisory controller demonstrates robustness to various signal time delays, while preserving a powerful performance in damping electromechanical oscillations inherent in the power system.

Time [s]
0 5 10 15 20G1
Spee
d D
evia
tion
[p.u
.]
10 -3
-4
-2
0
2
4Local control
Supervisory control
Time [s]
0 5 10 15 20G2
Spee
d D
evia
tion
[p.u
.]
10 -3
-4
-2
0
2
4Local control
Supervisory control
Time [s]
0 5 10 15 20G3
Spee
d D
evia
tion
[p.u
.]
10 -3
-5
0
5Local control
Supervisory control
Time [s]
0 5 10 15 20G4
Spee
d D
evia
tion
[p.u
.]
10 -3
-5
0
5Local control
Supervisory control
Fig. 22. Generators speed deviation responses to the large disturbance
considering 200ms signal time delays for supervisory control
D. Reduced System Inertia The impact of reduced system inertia on the closed-loop
system performance is considered here. As it is known, the system inertia is becoming one of major issues in future power systems with a high penetration of generating sources connected to the main grid over inverters. In this study, the inertia of the power system is gradually reduced from its original value of H = 6.3 s [2] to the minimum value of H = 3.3 s (~48% reduction) reflecting the case of a progressive renewable sources integration to the main grid, and in turn, evaluating controller’s transient performance under these conditions. Fig. 23, illustrates the inter-area active power response (as recorded on line 3) to the large disturbance, under the adoption of supervisory control for a range of system inertia values, ∈H {6.3, 5.3, 4.3, 3.3 s}, considering signal time delays of 200 ms. For a comparative study, the case of local control scheme under minimum system inertia (H = 3.3 s) and no time delays is included. It is worthwhile mentioning that the supervisory controller was able to assist a stable and robust system operation to the extreme condition of H = 2.2 s, however this case is not illustrated on the figures.
Time [s]
0 2 4 6 8 10 12 14 16 18 20
Act
ive
Pow
er [M
W]
40
50
60
70
80
90 H=6.3s H=5.3s H=4.3s H=3.3s Local control,H=3.3s
Fig. 23. Inter-area (line 3) active power response to the large disturbance for
different system inertia values considering 200ms signal time delays for supervisory control (dashed line: local control, H=3.3s, no time delays)
Fig. 24, shows the generators’ speed deviation responses to the large disturbance under supervisory and local control schemes, when system reaches its minimum inertia value of H = 3.3 s. Signal time delays (200 ms) are solely applied on supervisory controller. Once more, the supervisory controller has demonstrated unshaken performance in addressing electromechanical power oscillations exhibited by the system, maintaining at the same time, a solid operation under significantly reduced system inertia conditions. This promises a broad applicability of the proposed supervisory control scheme in future energy grids, accommodating high penetrations of renewable energy sources.
VI. CONCLUSION The results clearly demonstrated the benefit of utilizing a
multivariable supervisory control scheme based on wide area
Time [s]
0 5 10 15 20G1
Spee
d D
evia
tion
[p.u
.]
-0.01
-0.005
0
0.005
0.01Local control
Supervisory control
Time [s]
0 5 10 15 20G2
Spee
d D
evia
tion
[p.u
.]
-0.01
-0.005
0
0.005
0.01Local control
Supervisory control
Time [s]
0 5 10 15 20G3
Spee
d D
evia
tion
[p.u
.]
-0.01
-0.005
0
0.005
0.01Local control
Supervisory control
Time [s]
0 5 10 15 20G4
Spee
d D
evia
tion
[p.u
.]
-0.01
-0.005
0
0.005
0.01Local control
Supervisory control
Fig. 24. Generators speed deviation responses to the large disturbance with system inertia H=3.3s and 200ms signal time delays for supervisory control
measurements to optimally coordinate a number of FACTS devices and HVDC link in order to significantly suppress inter-area oscillations in a power system during a wide range of operating conditions and disturbances. The proposed scheme demonstrated the potential of wide applicability in future energy grids, as it showed enhanced stability margins under reduced system inertia conditions, which will be the expected scenario in future grids. Results obtained have concluded that time delays introduced by communication infrastructure are not affecting the effectiveness of the proposed scheme. It is expected that the scheme will be particularly beneficial in future power systems with high penetration of asynchronously connected generation, i.e. systems with significantly reduced and variable inertia. Furthermore, we believe that the proposed scheme will decrease likelihood of cascading events, which might lead to catastrophic power system blackouts. The proposed methodology can be applied on larger scale power systems of higher complexity, provided that the same principles are followed, such as system identification processes and linear control techniques. We are confident that the supervisory scheme will also fit well in the frequency stability problem.
REFERENCES [1] P. Pourbeik, P. Kundur, and C. W. Taylor, “The anatomy of a power
grid blackout - Root causes and dynamics of recent major blackouts,” IEEE Power and Energy Magazine, vol. 4, pp. 22-29, Sep.-Oct. 2006.
[2] P. Kundur, Power System Stability and Control. New York: McGraw-Hill, Inc., 1994.
[3] A. C. Zolotas, B. Chaudhuri, I. M. Jaimoukha, and P. Korba, “A study on LQG/LTR control for damping inter-area oscillations in power systems,” IEEE Trans. on Control Systems Technology, vol. 15, pp. 151–160, Jan. 2007.
[4] R. Preece, J. V. Milanović, A. M. Almutairi, O. Marjanovic, “Damping of inter-area oscillations in mixed AC/DC networks using WAMS based supplementary controller,” IEEE Trans. on Power Systems, vol. 28, pp. 1160-1169, May 2013.
[5] X. P. Zhang, C. Rehtanz, and B. Pal, Flexible AC Transmission Systems: Modelling and Control. Berlin: Springer, 2006.
[6] J. Arrillaga, Y. H. Liu, and N. R. Watson, Flexible Power Transmission: The HVDC Options. Chichester: John Wiley & Sons, Inc., 2007.
[7] S. Skogestad and I. Postlethwaite, Multivariable Feedback Control: Analysis and Design, Wiley, 1996.
[8] J. Hauer, W. Mittelstadt, K. Martin, J. Burns, H. Lee, J. Pierre, and D. Trudnowski, “Use of the WECC WAMS in Wide-Area Probing Tests for Validation of System Performance and Modelling,” IEEE Trans. on Power Systems, vol. 24, pp. 250–257, Feb. 2009.
[9] P. V. Overschee and B. D. Moor, Subspace Identification: Theory, Implementation, Application. Dordrecht, Kluwer, 1996.
[10] G. H. Golub and C. F. V. Loan, Matrix Computations. Baltimore, MD: The John Hopkins University Press, 1989.