Embed Size (px)
Citation preview

1
Daniel Józef Bem
NAWIGACJA SATELITARNA
Wrocław 2001
Sorc®
Spis treści
1. WPROWADZENIE 3
2. PODSTAWOWE POJĘCIA STOSOWANE W NAWIGACJI 4
3. CHARAKTERYSTYKA SATELITARNYCH SYSTEMÓW NAWIGACYJNYCH 6
4. UKŁADY WSPÓŁRZĘDNYCH 7
4.1. Geocentryczny inercyjny układ współrzędnych 74.2. Geocentryczny obracający się wraz z Ziemią układ współrzędnych 84.3. Światowy system geodezyjny (WGS-84) 8

Daniel Józef Bem, Nawigacja satelitarna Strona - -
2
5. ORBITY SZTUCZNYCH SATELITÓW ZIEMI 11
6. SYSTEM NAWIGACJI SATELITARNEJ NAVSTAR GPS 18
6.1. Krótka charakterystyka 186.2. Konstelacja GPS 206.3. Informacja nawigacyjna 226.4. Określenie pozycji użytkownika 246.5. Błąd określenia pozycji użytkownika 286.6. Efekty relatywistyczne 306.7. Różnicowe systemy GPS 31
BIBLIOGRAFIA 32
1. WprowadzenieNawigacja zajmuje się procesem kierowania ruchami pojazdów (lądowych, morskich, powietrznych,kosmicznych) z jednego punktu do drugiego. W pierwszych podróżach człowiek używał swoichzmysłów do określania kierunku, odległości, prędkości i pozycji obiektu, w którym podróżował. Niebyło to zbyt trudne na lądzie bogatym w różnorodne punkty orientacyjne. Kiedy jednak człowiek stałsię na tyle śmiały, aby wypłynąć na morze, wówczas musiał sięgnąć do pomocy przyrządówułatwiających obserwację zjawisk przyrody (wiatru, fal wody, ciał niebieskich). Przez wiele wiekówjednak nawigacja była raczej sztuką niż nauką. Pod koniec dwudziestego stulecia nawigacjarozwinęła się w wiedzę, umożliwiającą człowiekowi podróżowanie zarówno na Ziemi, jak i wprzestrzeni kosmicznej, wykorzystując w wysokim stopniu najnowsze osiągnięcia matematyki,elektroniki, mechaniki, ekonomii i filozofii. Przekształcenie nawigacji ze sztuki w wiedzę odbyło sięstosunkowo niedawno i jest ściśle związane z rozwojem teorii systemów, matematyki, informatyki itechnologii elektronowej.Podstawowym zadaniem nawigacji jest doprowadzenie poruszającego się pojazdu (lądowego,morskiego, powietrznego, kosmicznego) do określonego punktu z założoną dokładnością i wewłaściwym czasie. W celu dokładnego wykonania tego zadania stosuje się różne urządzenia i

Daniel Józef Bem, Nawigacja satelitarna Strona - -
3
systemy nawigacyjne, wśród których można wyróżnić: - mechaniczne i elektromechaniczne (logi, żyrokompasy, inercyjne systemy nawigacyjne), - magnetyczne (kompasy magnetyczne, magnetometry), - optyczne i kwantowo-optyczne (sekstanty, pelengatory podczerwieni, dalmierze,lokatory optyczne), - akustyczne i hydroakustyczne (pelengatory akustyczne, echosondy, hydrolokatory), - radiolokacyjne (dalmierze), - radiowe.
Wszystkie wymienione środki nawigacyjne mogą być stosowane w rozmaitych warunkach, a w celuzwiększenia dokładności określenia pozycji statku informacje z nich otrzymane muszą byćwzajemnie uzupełniane. Zastosowanie każdego z tych środków oddzielnie nie zawsze jest możliwe,ze względu na złe warunki meteorologiczne, ograniczoną widoczność ziemskich i niebieskichpunktów orientacyjnych, działanie anomalii magnetycznych na wskazania kompasu, zakłóceniawystępujące na Słońcu oraz burze magnetyczne powodujące pogorszenie się warunkówrozchodzenia się fal radiowych itd.
Z tego względu w celu wykonania zadań nawigacyjnych na pojazdach instaluje się różne przyrządyi urządzenia nawigacyjne, które umożliwiają określenie pozycji pojazdu w zależności od różnychwarunków, w jakich pojazd się znajduje. Szczególnie jest to istotne w warunkach długotrwałegoporuszania się pojazdu w rejonach nie zbadanych i pozbawionych znaków orientacyjnych (np.okręty podwodne pływające w zanurzeniu).Szczególnie atrakcyjne są systemy radionawigacyjne. Już pierwsi użytkownicy radia stwierdzili, żemoże ono zapewnić zarówno łączność, jak i informację nawigacyjną. Początkowo zastosowanieradia w nawigacji było ograniczone do wykonywania namiarów na istniejące radiostacjekomunikacyjne, a później także radiofoniczne. Z biegiem czasu rozwinęły się wyspecjalizowanesystemy radionawigacyjne. Urządzenia i systemy radionawigacyjne umożliwiają otrzymanieokreślonych informacji o parametrach nawigacyjnych i mogą być stosowane samodzielnie lub teżkompleksowo. W zależności od rodzaju wyposażenia mogą one być autonomiczne lub zależne.
Aparatura autonomicznych środków nawigacyjnych jest zainstalowana na pokładzie pojazdu, aokreślenie parametrów nawigacyjnych odbywa się bez otrzymywania informacji powstałych zwykorzystaniem innych urządzeń radionawigacyjnych.
Zależne środki tworzą systemy radionawigacyjne składające się z pokładowego (ruchomego) inaziemnego (zasadniczo stacjonarnego) wyposażenia.
Urządzenia i systemy radionawigacyjne, w zależności od zestawu wykonywanych zadań i ichwykorzystania, można scharakteryzować przez: - zasięg działania, czyli największą odległość pomiędzy pojazdem i punktemradionawigacyjnym, w której uzyskuje się jeszcze wymaganą dokładność (według zasięgu działaniasystemy radionawigacyjne dzieli się na systemy bliskiego (do 800 km), średniego (do 3000 km) idalekiego (powyżej 3000 km) zasięgu); - dokładność pomiaru parametrów nawigacyjnych, które określa przeznaczenieurządzeń i systemów radionawigacyjnych; - szybkość uzyskiwania danych (co jest szczególnie ważne w lotnictwie i technicerakietowej); - przepustowość, czyli zdolność systemu do jednoczesnego obsługiwania określonejliczby obiektów; - odporność na zakłócenia; - niezawodność; - ekonomiczność; - rozmiary i masa, które mają szczególne znaczenie przy umieszczaniu urządzeń nasamolotach i rakietach; - zdolność do pracy w określonych warunkach środowiskowych.
2. Podstawowe pojęcia stosowane w nawigacjiPodczas prowadzenia pojazdu i określania jego pozycji stosuje się następujące podstawowepojęcia:

Daniel Józef Bem, Nawigacja satelitarna Strona - -
4
- prędkość pojazdu, która charakteryzuje się przesunięciem jego środka ciężkości wjednostce czasu, - tor ruchu pojazdu, którym jest linia, jaką zakreśla w przestrzeni środek ciężkościpojazdu, - trasa, czyli rzut toru na powierzchnię Ziemi, - kurs, którym jest kąt mierzony w płaszczyźnie poziomej między kierunkiempółnocnym południka przechodzącego przez środek ciężkości pojazdu i jego podłużną osią, - namiar, który jest kątem mierzonym w płaszczyźnie poziomej między północnymkierunkiem południka przechodzącego przez środek ciężkości pojazdu i kierunkiem na dany punktorientacyjny, - pozycja w dowolnym czasie, która określa rzut środka ciężkości pojazdu napowierzchnię Ziemi, - pozycja obserwowana, czyli otrzymana na podstawie obserwacji przedmiotówstałych, których położenie jest ściśle określone na mapie lub na podstawie obserwacji ciałniebieskich, - pozycja zliczona, którą jest miejsce pojazdu liczone od ostatniej pozycji obserwowanej, aotrzymane na podstawie znajomości kursu rzeczywistego i przebytej odległości stwierdzonej wedługprzyrządów, z uwzględnieniem oddziaływania sił zewnętrznych (prądów morskich, wiatrów).
Zasadniczo pozycję pojazdu określa się w stosunku do powierzchni Ziemi według przyjętego układuwspółrzędnych. Podczas lotu w przestrzeni kosmicznej współrzędne pojazdu kosmicznego określasię w stosunku do planet i gwiazd, których położenie w przestrzeni jest znane. W celu określeniapozycji pojazdu za pomocą środków technicznych, wyznacza się określone parametry nawigacyjne,jak np. odległość od oznaczonych punktów na Ziemi lub kąty, pod jakimi te punkty są widoczne zepojazdu; parametry te nie są współrzędnymi geograficznymi.Mierzone parametry nawigacyjne i współrzędne geograficzne są ze sobą związane określonymirównaniami, których graficzne rozwiązania stanowią tzw. linie pozycyjne. Linią pozycyjną nazywasię miejsce geometryczne punktów na powierzchni Ziemi, odpowiadającej stałej wartości mierzonejwielkości, a więc kąta, odległości, różnicy lub sumy odległości.Na przykład linią pozycyjną, czyli miejscem geometrycznym punktów na powierzchni Ziemi, zktórych pomierzona została w określonym momencie wysokość obserwowanej gwiazdy jest okrąg,którego środkiem jest rzut gwiazdy (punkt podgwiezdny), a promieniem sferycznym odmierzonaodległość zenitalna, czyli dopełnienie wysokości.Jedna obserwacja daje tylko jedną linię pozycyjną, dwie różne obserwacje dokonane w jednymmomencie dają dwie linie pozycyjne, w których przecięciu znajduje się miejsce obserwacji. Każdysystem nawigacyjny charakteryzuje się ściśle określoną linią pozycyjną.Rozpatrzmy główne linie pozycyjne spotykane w systemach nawigacyjnych.Ortodroma jest linią najkrótszej odległości między dwoma punktami na powierzchni kuli. Jakwynika z podstawowych pojęć geometrii, najkrótszą odległością na powierzchni kuli pomiędzydwoma punktami jest łuk koła wielkiego.
Rys 2.1. Ortodroma
Jak widać na rysunku 2.1, łuk koła wielkiego przechodzącego przez dwa dane punkty jest nie tylkonajkrótszym, ale również jedynym. Wynika stąd wniosek, że przez dwa punkty na powierzchniZiemi nie leżące na przeciwległych końcach średnicy kuli ziemskiej można przeprowadzić tylkojedną ortodromę. Ortodroma jest więc linią pozycyjną wszystkich punktów, których suma odległościod dwóch punktów danych znajdujących się na niej jest stała i najmniejsza.
Linia równych namiarów (lub linia równych azymutów) jest to linia pozycyjna na sferze, mająca tęwłaściwość, że z każdego punktu tej linii namiar (azymut) na pewien punkt stały jest zawsze takisam (rys. 2.2).

Daniel Józef Bem, Nawigacja satelitarna Strona - -
5
Rys. 2.2. Linie równych namiarówLinia równych odległości jest to linia pozycyjna, której wszystkie punkty znajdują się wjednakowej odległości od danego punktu T (rys. 2.3). Linia ta jest związana z systemamiradionawigacyjnymi opartymi na pomiarach odległości.
Rys. 2.3. Linie równych odległości
Linia równych sum odległości jest to linia pozycyjna, której wszystkie punkty są w takichodległościach od dwóch danych punktów T1 i T2 (rys. 2.4), że sumy tych odległości są wielkościąstała. Wykres tej linii na płaszczyźnie przedstawia elipsę, na powierzchni kuli zaś elipsę sferyczną.
Rys. 2.4. Linie równych sum odległościLinia równych różnic odległości jest to linia pozycyjna, będąca miejscem geometrycznychpunktów, których różnica odległości od dwóch punktów o znanych pozycjach jest stała. Dlaobserwatora znajdującego się w dowolnym punkcie R linii pozycyjnej (rys. 2.5) różnica odległości(d1 - d2) od tego punktu do dwóch punktów T1 i T2 (których położenie jest określone) jest stała irówna 2a. W przypadku rozpatrywania zagadnienia na płaszczyźnie omawiana linia pozycyjna jesthiperbolą, a na powierzchni kuli - hiperbolą sferyczną.
Rys. 2.5. Linie równych różnic odległości
Systemy radionawigacyjne umożliwiające wyznaczanie różnic odległości od dwóch radiostacjiznajdujących się w określonych punktach noszą nazwę systemów hiperbolicznych.Wprowadźmy jeszcze pojęcie loksodromy, którą nazywamy drogę pojazdu, przecinającą południkirzeczywiste pod jednakowymi kątami (rys. 2.6). Na małych odległościach różnica drogi wedługortodromy i loksodromy jest nieduża i zwykle nie bierze się jej pod uwagę przy obliczaniu drogiwedług loksodromy.
Rys. 2.6. Ortodroma i loksodroma
Nawigacja trójwymiarowa opiera się na powierzchniach pozycyjnych. Powierzchnią pozycyjną jestpowierzchnia, z której każdego punktu parametr nawigacyjny mierzony w stosunku do określonegoobiektu kosmicznego (naturalnego lub sztucznego) ma wartość stałą. W nawigacji lądowej pozycjępojazdu można określić na podstawie dwóch linii pozycyjnych; do określenia pozycji pojazdu wukładzie trójwymiarowym należy znać nie mniej niż trzy powierzchnie pozycyjne. Przecięcie siędwóch powierzchni pozycyjnych daje linię pozycyjną, która, przecinając się z trzecią powierzchniępozycyjną, wyznacza dwa punkty określające przypuszczalną pozycję statku. Przybliżona pozycjapojazdu jest znana, więc występującą niejednoznaczność określenia pozycji łatwo wyjaśnić.
3. Charakterystyka satelitarnych systemów nawigacyjnychSatelitarne systemy radionawigacyjne charakteryzują się następującymi zaletami w porównaniu zklasycznymi systemami radionawigacyjnymi: - globalnością systemów (systemy klasyczne, z wyjątkiem systemu Omega nie majątej cechy), - dużą i prawie jednakową dokładnością określania pozycji na całym obszarze

Daniel Józef Bem, Nawigacja satelitarna Strona - -
6
stosowalności, - niezawodnością od warunków meteorologicznych, - niezawodnością od pory roku i doby, - możliwością przekazywania dodatkowych informacji, nie związanych z nawigacją.
Satelitarny system nawigacyjny tworzą następujące elementy: - określona liczba satelitów nawigacyjnych poruszających się dookoła Ziemi powyznaczonych orbitach; - sieć stacji obserwacyjnych odbierających sygnały nadawane przez urządzeniazainstalowane na satelitach; stacje te mają łączność z centrum sterowania systemem, w którymoblicza się efemerydy satelitów; - środki łączności, służące do przekazywania obliczonych efemeryd satelitówposzczególnym użytkownikom; - autonomiczne urządzenia nawigacyjne, wyznaczające pozycję obiektu.
W zależności od rodzaju aparatury radionawigacyjnej systemy satelitarne mogą opierać się napomiarze odległości, kąta lub na zjawisku Dopplera. Zawsze jednak podstawowym elementemsystemu jest znany i określony względem Ziemi tor lotu satelity, na którego podstawie wyznaczasię linie pozycyjne.Systemy dopplerowskie opierają się na pomiarze szybkości zmiany odległości od obiektu dosatelity, którą określa częstotliwość Dopplera. Przecięcie się powierzchni stożkowej odpowiadającejstałej wartości częstotliwości Dopplera z powierzchnią kuli ziemskiej wyznacza linię pozycyjną,zwaną izodoppą (rys. 3.1). Do określenia pozycji obiektu w układzie trójwymiarowym trzebawyznaczyć trzy linie pozycyjne, tzn. zmierzyć wartości prędkości satelity względem punktuobserwacji w trzech kolejnych chwilach.Zasada określania pozycji obiektu na podstawie pomiaru częstotliwości Dopplera jest analogicznado zasady klasycznych hiperbolicznych systemów nawigacyjnych, w których baza jest równaodległości przebywanej przez satelitę w wybranym przedziale czasu.
Rys. 3.1. Tworzenie linii pozycyjnej - izodoppy - w satelitarnym dopplerowskim systemienawigacyjnym
Dopplerowskim satelitarnym systemem nawigacyjnym był system Transit opracowany na początkulat sześćdziesiątych na potrzeby amerykańskiej flotylli łodzi podwodnych Polaris. W roku 1968system ten, po udoskonaleniu, został oddany do użytku cywilnego pod nazwą NNSS (ang. NavalNavigation Satellite System). Szybko stał się on popularnym i niezawodnym środkiem określaniapozycji statków morskich w skali całego globu. Średni błąd określenia pozycji wynosi 0,5 milimorskiej w skali globalnej.
Systemy odległościowe. Powierzchnia pozycyjna ma postać sfery ze środkiem w punkcie, wktórym znajduje się satelita w momencie dokonywania pomiaru odległości i promieniu równymodległości między obiektem i satelitą. Do określenia pozycji obiektu w układzie trójwymiarowymnależy wyznaczyć co najmniej trzy powierzchnie pozycyjne (rys. 3.2). Można tego dokonać bądźmierząc w tym samym czasie odległości od trzech różnych satelitów, bądź mierząc trzy odległoścido tego samego satelity w różnych momentach.
Rys. 3.2. Powierzchnia pozycyjna w postaci sfery (a); przecięcie się dwóch powierzchnipozycyjnych (dwóch sfer) wyznacza linię pozycyjną w postaci okręgu (b); przecięcie się tej liniipozycyjnej z trzecią powierzchnią pozycyjną wyznacza dwa możliwe położenia pojazdu (c); zwyklenie ma kłopotu ze stwierdzeniem, które z tych położeń jest właściwePomiar odległości do jednego satelity wyznacza powierzchnię pozycyjną w postaci sfery. Pomiarodległości do drugiego satelity wyznacza drugą powierzchnię pozycyjną, również w postaci sfery.Przecięcie tych powierzchni pozycyjnych wyznacza linię pozycyjną w postaci okręgu. Przecięcie siętej linii pozycyjnej z trzecią powierzchnią pozycyjną, uzyskaną w wyniku pomiaru odległości dotrzeciego satelity, wyznacza dwa możliwe położenia pojazdu. Zwykle nie ma kłopotu ze

Daniel Józef Bem, Nawigacja satelitarna Strona - -
7
stwierdzeniem, które z tych położeń jest właściwe.4. Układy współrzędnychW celu sformułowania równań umożliwiających określenie pozycji i prędkości pojazdu na podstawiepomiaru odległości do satelitów należy wybrać odpowiednie układy współrzędnych. Zwykle wektorypołożenia i prędkości satelity i wektory położenia i prędkości odbiornika nawigacyjnego określa sięw kartezjańskich układach współrzędnych.
4.1. Geocentryczny inercyjny układ współrzędnychGeocentryczny inercyjny układ współrzędnych (ang. ECI - Earth-Centered Inertial CoordinateSystem) jest to kartezjański układ współrzędnych, którego płaszczyzna x-y pokrywa się zpłaszczyzną równikową Ziemi, oś x jest stale skierowana ku ustalonemu punktowi na sferzeniebieskiej (zwykle jest to punkt równonocy wiosennej), oś z pokrywa się z osią Ziemi i jestskierowana ku biegunowi północnemu, oś y dobiera się tak, aby utworzyć prawoskrętny układwspółrzędnych (rys. 4.1).
Rys. 4.1. Geocentryczny inercyjny układ współrzędnych (ECI)
Układ ECI jest inercyjny w tym sensie, że równania ruchu sztucznych satelitów Ziemi zapisane wtym układzie spełniają niutonowskie prawa ruchu i grawitacji.
Pewien kłopot z podaną definicją układu ECI wynika z nieregularności ruchu Ziemi. Wskutekniesferycznego kształtu Ziemi i niejednorodnego rozkładu masy, grawitacyjne oddziaływanie Słońcai Księżyca powoduje przemieszczanie się ziemskiej płaszczyzny równikowej względem sferyniebieskiej. Ponieważ oś x jest określona względem ustalonego punktu na sferze niebieskiej, a oś z- względem ziemskiej płaszczyzny równikowej, to podana wcześniej definicja układu ECI niezapewnia w rzeczywistości jego inercyjności. Rozwiązaniem tego kłopotu jest zdefiniowaniepołożenia osi układu współrzędnych w ustalonym momencie czasu, zwanym epoką. Na potrzebysystemu GPS przyjęto położenie osi układu ECI 1 stycznia 2000 roku o godzinie 12.00 czasu UTC(ang. Coordinated Universal Time). Oś x jest skierowana od środka Ziemi ku punktowi równonocywiosennej, pozostałe osie - zgodnie z wcześniejszym opisem. W ten sposób położenie osi zostałodla danej epoki jednoznacznie ustalone, a więc układ ECI stał się rzeczywiście układem inercyjnym.
4.2. Geocentryczny obracający się wraz z Ziemią układ współrzędnychDo określenia położenia odbiornika nawigacyjnego (GPS) wygodniej jest stosować układwspółrzędnych, który obraca się wraz z Ziemią (ang. ECEF - Earth-Centered Earth-FixedCoordinate System). W takim układzie współrzędnych łatwiej jest wyznaczyć współrzędnegeograficzne i wysokość pojazdu. Podobnie jak w układzie ECI, w układzie ECEF płaszczyzna x-ypokrywa się z równikową płaszczyzną Ziemi, oś x jest jednak skierowana na południk Greenwich
, a oś y - na południk
. Osie x i y obracają się więc zgodnie z obrotem Ziemi i nie opisują ustalonych kierunków winercjalnej przestrzeni. Oś z jest prostopadła do płaszczyzny równikowej i skierowana ku biegunowipółnocnemu.
W celu określenia pozycji odbiornika GPS należy najpierw dokonać przetworzenia efemerydsatelitów z układu współrzędnych ECI do układu współrzędnych ECEF. W dalszym ciągu niebędziemy się zajmowali problemem przetworzeniem efemeryd satelitów z układu ECI do układuECEF. Zakładamy więc, że znane są współrzędne satelitów GPS w układzie ECEF.
4.3. Światowy system geodezyjny (WGS-84)Standardowym modelem fizycznym Ziemi stosowanym w systemie GPS jest model opisany wŚwiatowym systemie geodezyjnym WGS-84 (ang. World Geodetic System - 84). W modelu tym

Daniel Józef Bem, Nawigacja satelitarna Strona - -
8
rzeczywisty kształt Ziemi aproksymuje się elipsoidą obrotową. Przekroje modelu płaszczyznamirównoległymi do płaszczyzny równikowej są kołami. Promień przekroju równikowego wynosi6378,137 km. Jest to średni równikowy promień Ziemi. Przekroje modelu płaszczyznaminormalnymi do płaszczyzny równikowej są elipsami (rys. 4.2). Wielka oś przekroju zawierającegooś z pokrywa się z równikową średnicą ziemi; wielka półoś a ma więc taką samą długość jak średnipromień równikowy. Mała półoś przekroju pokazanego na rysunku 9 pokrywa się z biegunowąśrednicą Ziemi. Mała półoś b ma w modelu WGS-84 długość 6356,7523142 km.
Rys. 4.2. Elipsoidalny model Ziemi (przekrój płaszczyzna normalną do płaszczyzny równikowej)
Parametry modelu WGS-84:
- mimośród
(4.1)
- spłaszczenie
(4.2)Czasem używa się dodatkowego parametru, zwanego drugim mimośrodem
(4.3)W celu określenia współrzędnych geodezyjnych: szerokości (j) i długości (l) oraz wysokości (h)użytkownika (odbiornika nawigacyjnego GPS). wprowadźmy następujące oznaczenia (rys. X.12).Położenie użytkownika (punkt S) określa wektorprzy czym
są współrzędnymi użytkownika (odbiornika nawigacyjnego) w układzie współrzędnych ECEF; O jestśrodkiem Ziemi. Punktem na powierzchni elipsoidy najbliższym względem położenia użytkownikajest punkt N. Prosta wyznaczona przez wektor n normalny do powierzchni elipsoidy wystawiony wpunkcie N przecina płaszczyznę równikową w punkcie P. Punkt A jest punktem na równikunajbliższym do punktu P.Długość geodezyjna l jest to kąt między użytkownikiem i osią x, mierzony w płaszczyźnie x-y
(4.4)przy czym kąty ujemne odpowiadają długości zachodniej.Szerokość geodezyjną j wyznacza kąt między wektorem normalnym do powierzchni elipsoidy ijego rzutem na płaszczyznę równikową (kąt NPA na rysunku 4.2). Konwencjonalnie przyjmuje się,że j jest dodatnie, jeśli(użytkownik znajduje się na półkuli północnej) i ujemne, jeśli
Wysokość geodezyjna h jest równa długości odcinka SN na rysunku 4.2. Obliczona przez odbiornikGPS, stosujący model WGS-84, wysokość geodezyjna może znacznie różnić się od wysokościodczytanej z mapy. Wynika to z różnic między elipsoidą WGS-4 i geoidą (lokalny średni poziommorza). W celu zwiększenia dokładności określenia wysokości odbiornika można stosować modeleZiemi obowiązujące lokalnie, np. European Datum 1950 (ED-50).Wzory umożliwiające określenie współrzędnych geodezyjnych (l,j,h) użytkownika na podstawiejego współrzędnych w układzie kartezjańskim ECEF
zebrano w tabeli 4.1.

Daniel Józef Bem, Nawigacja satelitarna Strona - -
9
Tabela 4.1Obliczenie współrzędnych geodezyjnych na podstawie współrzędnych użytkownika
w układzie ECEF
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)

Daniel Józef Bem, Nawigacja satelitarna Strona - -
10
(13)
(14)
(15)
Określenie wektora położenia użytkownika
na podstawie znajomości jego współrzędnych geodezyjnych (l,j,h) opisuje wzór
(4.5)
5. Orbity sztucznych satelitów ZiemiRuch sztucznego satelity w polu grawitacyjnym Ziemi można określić na podstawie newtonowskichzasad mechaniki i prawa powszechnego ciążenia. Rozważmy jednorodną kulistą Ziemię o masie mi satelitę o masie ms znajdujące się w odległościach odpowiednio r1 i r2 od początku dowolniewybranego inercjalnego układu odniesienia (rys. 5.1). Z drugiego
Rys. 5.1. Ziemia i satelita w inercjalnym układzie współrzędnych
prawa Newtona (iloczyn masy ciała przez jego przyspieszenie jest równy sile działającej na to ciało)wynika, że siły działające na Ziemię i satelitę są opisane równaniami:
, (5.1a)
. (5.1bb)Prawo powszechnego ciążenia głosi, że siła przyciągania między dwoma dowolnymi ciałami jestwprost proporcjonalna do iloczynu ich mas i odwrotnie proporcjonalna do kwadratu odległościmiędzy nimi, zatem
, (5.2)
przy czym g = 6,67 x 10-11 m3 kg-1 s-2 jest stałą grawitacyjną.
Z równań (X.6) i (X.7) wynika, że:
; (5.3a)
. (5.3b)Po odjęciu stronami równań (5.3b) i (5.3a) oraz podstawieniu r = r2 - r1 otrzymujemy
. (5.4)
Masa sztucznego satelity jest nieporównywalnie mała w stosunku do masy Ziemi, możemy więc ją

Daniel Józef Bem, Nawigacja satelitarna Strona - -
11
zaniedbać w równaniu (5.4). Otrzymamy wówczas
, (5.5)
przy czym m = 3,986013 x 1014 m3 s-2 jest stałą przyciągania Ziemi (masa Ziemi m = 5,975 x 1024kg). Równanie (X.10) jest znane jako równanie ruchu dwóch ciał. Opisuje ono ruch punktumaterialnego w centralnym polu grawitacyjnym. Z pewnym przybliżeniem opisuje ono także ruchsatelity Ziemi po orbicie.
W 1609 r. Kepler sformułował, na podstawie obserwacji ruchu planet, trzy prawa dotyczące ichorbit. W odniesieniu do orbit sztucznych satelitów Ziemi mają one następującą postać.1. Prawo Keplera. Orbita sztucznego satelity Ziemi jest elipsą (w szczególnym przypadkuokręgiem) i leży w nieruchomej płaszczyźnie przechodzącej przez środek ciężkości Ziemi, któryznajduje się w jednym z jej ognisk (w środku okręgu w przypadku orbity kołowej).2. Prawo Keplera. Promień wodzący satelity (odcinek łączący satelitę ze środkiem ciężkości Ziemi)zakreśla w jednakowych odstępach czasu jednakowe pola.3. Prawo Keplera. Stosunek kwadratów okresów obiegu satelitów jest równy stosunkowisześcianów ich średnich odległości od środka ciężkości Ziemi, tzn. sześcianów wielkich półosi ichorbit.Z praw Keplera wynikają trzy równania.1. Równanie energii
, (5.6)
przy czym W jest całkowitą energią satelity, a v - jego prędkością. Z równania (5.6) wynika, żecałkowita energia satelity nie ulega zmianie w trakcie jego ruchu po orbicie. Oddalaniu się satelityod środka ciężkości Ziemi towarzyszy więc zmniejszenie się jego prędkości, zbliżaniu natomiast -wzrost prędkości.
2. Równanie pól
(5.7a)
lub
. (5.7b)
Równania (5.7) są matematycznym zapisem treści drugiego prawa Keplera. Z wektorowej postacitego równania wynika, że ruch satelity odbywa się w nieruchomej płaszczyźnie przechodzącej przezśrodek ciężkości Ziemi. Płaszczyznę tę nazywamy płaszczyzną orbity.
3. Równanie Laplace’a
, (5.8)
przy czym A jest wektorem Laplace’a. Równanie (5.8) określa związek między wektorami r, v i C.Z równania pól (5.7) i równania Laplace’a (5.8) wynika, że orbita ciała poruszającego się wcentralnym polu grawitacyjnym jest krzywą stożkową, w której ognisku znajduje się centrumprzyciągania. Trajektoria sztucznego satelity Ziemi jest krzywą zamkniętą, więc jego ruch możeodbywać się tylko po elipsie lub okręgu, który jest szczególnym przypadkiem elipsy. Ruch po innychkrzywych stożkowych jest związany z ucieczką satelity z pola przyciągania Ziemi. W ten sposóbdochodzimy do pierwszego prawa Keplera.
Rys. 5.2. Orbita sztucznego satelity Ziemi

Daniel Józef Bem, Nawigacja satelitarna Strona - -
12
Równanie elipsy w biegunowym układzie współrzędnych (rys. 5.2) ma postać
, (5.9)przy czym:
- parametr ogniskowy (dodatnia wartość rzędnej wystawionej zogniska),
- mimośród.
Kształt orbity zależy od mimośrodu e. Jeśli e = 0, to elipsa przechodzi w okrąg, mówimy wówczas oorbicie kołowej. Jeśli 0 < e < 1, to mamy do czynienia z orbita eliptyczną. Wartości J = 0 odpowiadanajwiększe zbliżenie satelity do środka ciężkości Ziemi (perigeum), wartości J = p natomiastodpowiada największe oddalenie satelity od środka Ziemi (apogeum). Kąt J liczymy od perigeumorbity w kierunku ruchu satelity. W astronomii kąt J nazywa się anomalią prawdziwą. Linię łączącąpunkty apogeum i perigeum nazywamy linią apsyd.
Posługując się znanymi zależnościami geometrii analitycznej, możemy zapisać kilka użytecznychzależności wiążących parametry orbity eliptycznej:- odległość perigeum od środka ciężkości Ziemi (promień perigeum)
, (5.10)
- odległość apogeum od środka ciężkości Ziemi (promień apogeum)
, (5.11)
- duża półoś orbity
, (5.12)
- mała półoś orbity
, (5.13)
- mimośród
, (5.14)
- parametr ogniskowy
. (5.15)
Kształt i rozmiary orbity eliptycznej określają w pełni dowolne dwa z wymienionych parametrów.
Bieżącą wartość promienia wodzącego w czasie ruchu satelity po orbicie opisuje równanie (5.10).Podanie jawnej zależności promienia wodzącego od czasu nie jest możliwe. W związku z tymwprowadza się pojęcie anomalii mimośrodowej E, odpowiadającej ruchowi hipotetycznego satelitypo orbicie kołowej o promieniu równym dużej półosi orbity rzeczywistej (rys. 5.2), związanej zanomalią prawdziwą równaniem
. (5.16)
Anomalia mimośrodowa jest związana z czasem równaniem Keplera

Daniel Józef Bem, Nawigacja satelitarna Strona - -
13
, (5.17)
przy czym:
- anomalia średnia, (5.18)
- moment przejścia satelity przez perigeum.
Okres obiegu satelity po orbicie można wyznaczyć z równania (5.17) po podstawieniu E = 2p,otrzymujemy wówczas
. (5.19)
Z równania (5.19) wynika trzecie prawo Keplera
. (5.20)
Prędkość satelity na orbicie jest opisana wzorem
. (5.21)
Można ją rozłożyć na dwie składowe:
- styczną
, (5.22a)
- radialną
. (5.22b)
W apogeum i perigeum znika składowa radialna prędkości satelity; składowa styczna przyjmujeodpowiednio wartości:
, (5.23a)
. (5.23b)W przypadku orbity kołowej składowa radialna prędkości satelity nie występuje w ogóle, a składowastyczna jest wyrażona wzorem
, (5.24)
przy czym r = p jest promieniem orbity.
Elementy orbity. Położenie orbity w przestrzeni, jej rozmiary oraz położenie satelity na orbicie,określa sześć parametrów, zwanych elementami orbity. W ogólnym przypadku płaszczyzna orbityprzecina się z płaszczyzną równika ziemskiego (rys. 5.3), przy czym ślad przecięcia nosi nazwę liniiwęzłów. Punkt, w którym satelita przechodzi przez płaszczyznę równikową poruszając się zpołudnia na północ, nazywamy węzłem wstępującym; diametralnie przeciwny punkt - węzłemzstępującym. Położenie węzła wstępującego określone przez kąt W mierzony od prostej łączącejśrodek ciężkości Ziemi z punktem równonocy wiosennej w kierunku przeciwnym do ruchuwskazówek zegara, patrząc z bieguna północnego, jest pierwszym elementem orbity. Punktrównonocy wiosennej jest punktem przecięcia się ekliptyki z równikiem niebieskim, odpowiadający

Daniel Józef Bem, Nawigacja satelitarna Strona - -
14
przejściu Słońca przez punkt Barana (około 21 marca). Kąt W nazywamy rektascencją węzławstępującego; może on przyjmować wartości z przedziału < 0°, 360° > .Drugim elementem orbity jest inklinacja, tzn. kąt i między płaszczyzną równika ziemskiego ipłaszczyzną orbity, mierzony od płaszczyzny równikowej w kierunku przeciwnym do ruchuwskazówek zegara, przez obserwatora patrzącego od strony węzła wstępującego. Kąt ten możezawierać się w przedziale < 0°, 180°>. W zależności od wartości inklinacji, orbity dzielimy narównikowe (i = 0), biegunowe (i = 90°) i nachylone. Orbity nachylone mogą być proste (0°< i < 90°),gdy kierunek ruchu satelity jest zgodny z kierunkiem obrotu Ziemi, i przeciwne (90° < i < 180°), gdykierunek ruchu satelity jest przeciwny względem kierunku obrotu Ziemi.
Kolejnym elementem orbity jest argument perigeum, tzn. kąt w mierzony w płaszczyźnie orbity wkierunku ruchu satelity od węzła wstępującego do perigeum. Argument perigeum może zmieniaćsię w granicach od 0° do 360°. Satelity z apogeum na półkuli północnej mają argument w przedziale180° A w A 360°.Rektascencja węzła wstępującego W , inklinacja i oraz argument perigeum w określają położenieorbity w przestrzeni. Kształt i rozmiary orbity określają: duża półoś orbity a i mimośród e.Szóstym elementem orbity jest czas tp przejścia satelity przez perigeum, łączący położenie orbity wprzestrzeni z położeniem satelity na orbicie.
Rys. 5.3. Elementy orbity sztucznego satelity ZiemiRektascencja węzła wstępującego W , inklinacja i, argument perigeum w, duża półoś orbity a,mimośród e i czas przejścia satelity przez perigeum tp są keplerowskimi elementami orbity.
Równanie (5.5) nie opisuje dokładnie ruchu sztucznego satelity Ziemi ponieważ Ziemia nie jestkulista i nie ma równomiernego rozkładu masy. Niech V przedstawia rzeczywisty potencjałgrawitacyjny Ziemi w dowolnym punkcie przestrzeni, równanie (5.5) można wówczas zapisać wpostaci
(5.25)przy czym
W zagadnieniu dwóch ciał V = m/r, więc
Równanie (5.25) jest zatem rzeczywiście uogólnieniem równania (5.5), opisującego ruch punktumaterialnego w centralnym polu grawitacyjnym.Rzeczywiste pole grawitacyjne Ziemi modeluje się za pomocą szeregu harmonicznych sferycznych.Pole w punkcie P o współrzędnych (r,f,a) opisuje wyrażenie
(5.26)przy czym:
r - odległość punktu P od środka Ziemi (początku układu współrzędnych);f- geocentryczna szerokość punktu P (kąt między wektorem r i płaszczyzną x-y;a - wzniesienie proste punktu P;a - średni równikowy promień Ziemi (6378,137 km w modelu WGS-84);
- stowarzyszona funkcja Legendre'a;
- kosinusowy współczynnik harmonicznej sferycznej stopnia l, rzędu m;

Daniel Józef Bem, Nawigacja satelitarna Strona - -
15
- sinusowy współczynnik harmonicznej sferycznej stopnia l, rzędu m.
Zauważmy, że pierwszy człon po prawej stronie równania (5.26) reprezentuje centralne polegrawitacyjne. Zauważmy również, że szerokość geocentryczna w równaniu (5.26) jest różna odszerokości geodezyjnej określonej w . W systemie WGS-84 określono sferyczne współczynnikiharmoniczne
aż do osiemnastego stopnia i rzędu.
Dodatkowo na satelity nawigacyjne działają następujące siły: pole grawitacyjne tzw. trzecich ciał,przede wszystkim Słońca i Księżyca, ciśnienie promieniowania słonecznego, pływy ziemskie,odgazowanie (powolne uwalnianie się gazów ze struktury satelity), manewry orbitalne. Wpływ tychwszystkich sił uwzględnia się przez wprowadzenie do równania (5.25) członu korekcyjnego wpostaci wektora, tak więc równanie ruchu satelity przyjmuje postać
(5.27)
W różny sposób można opisać orbitalne parametry satelity. Najbardziej oczywistym sposobem jestokreślenie wektora pozycyjnego wektora prędkości pewnym momencie odniesieniai rozwiązanie równania ruchu (5.27) w celu określenia wektora pozycyjnegoi wektora prędkościsatelity w dowolnym czasie t. Tak postawione zadanie może być rozwiązane analitycznie tylko dlazagadnienia dwóch ciał; uwzględnienia perturbacji wprowadzanych przez inne czynniki - to znaczyrozwiązanie równania (5.27) - można dokonać tylko numerycznie.W równaniu potencjałowym (5.26) dominującym składnikiem jest centralne pole grawitacyjne.Można więc rozwiązanie równania ruchu satelity w rzeczywistych warunkach (5.27) opisać zapomocą sześciu klasycznych elementów keplerowskich, z tym że nie będą one niezależne odczasu. Takie elementy orbity nazywamy ściśle stycznymi.
6. System nawigacji satelitarnej NAVSTAR GPS6.1. Krótka charakterystykaNa początku lat sześćdziesiątych kilka amerykańskich organizacji rządowych, w tym organizacjewojskowe, Krajowa Administracja Aeronautyki i Kosmonautyki (National Aeronautics and SpaceAgency - NASA), Departament Transportu (Department of Transportation - DOT) byłyzainteresowane zbudowaniem satelitarnego systemu nawigacyjnego. Nowemu systemowinawigacyjnemu postawiono następujące wymagania: globalny zasięg, praca ciągła w dowolnychwarunkach pogodowych, zdolność do obsługiwania pojazdów o dużej dynamice ruchu, dużadokładność określania pozycji.
Dopplerowski system nawigacji satelitarnej Transit, który wszedł w fazę operacyjną w roku 1964,był powszechnie akceptowany do określania pozycji pojazdów o niezbyt dużej dynamice ruchu.System ten umożliwiał określenie pozycji statku znajdującego się na równiku średnio raz na 110minut, przy czym określenie pozycji trwało od 10 do 15 minut. Możliwa częstość określania pozycjistatku wzrastała ze wzrostem szerokości geograficznej, np. przy szerokości
można było określać pozycję statku raz na 30 minut. Mankamenty systemu Transit spowodowały,że Marynarka Amerykańska (US Navy) była zainteresowana udoskonaleniem systemu Transit lubbudową nowego systemu nawigacji satelitarnej o wymienionych wcześniej właściwościach. Różneodmiany systemu Transit proponowało Laboratorium Fizyki Stosowanej Uniwersytetu JohnaHopkinsa (Johns Hopkins University Applied Physics Laboratory). Laboratorium BadawczeMarynarki (Naval Research Laboratory - NRL) pracowało nad programem satelitarnej precyzyjnejsłużby czasu, zwanym programem Timation. Program ten rozszerzono o możliwość pomiaruodległości do satelitów, dzięki temu system Timation mógł służyć do dwuwymiarowego określaniapozycji statków.
W tym samym czasie, gdy Marynarka Amerykańska pracowała nad udoskonaleniem systemuTransit i nad programem Timation, Amerykańskie Wojka Lotnicze (US Air Force) przedstawiłykoncepcję satelitarnego systemu nawigacyjnego pod nazwą System 621B. Satelity tego systemu, w

Daniel Józef Bem, Nawigacja satelitarna Strona - -
16
liczbie od 15 do 20, miały poruszać się po eliptycznych orbitach o nachyleniuDo pomiaru odległości do satelitów proponowano zastosować kluczowanie fazy sygnału nośnegoza pomocą ciągu pseudolosowego. System 621b miał zapewnić trójwymiarowe kreślanie pozycji wskali całego globu w dowolnych warunkach meteorologicznych. Koncepcję systemu testowano zapomocą tzw. pseudolitów, tzn. stacji naziemnych nadających takie same sygnały, jakie miałynadawać satelity. Sygnały te były odbierane przez latające samoloty, które na ich podstawieokreślały swoje pozycje.Również Amerykańska Piechota (US Army) prowadziła badania nad wyborem przyszłego systemunawigacji satelitarnej. Wynikiem tych badań było stwierdzenie, najlepszym rozwiązaniem jestsystem odległościowy z pomiarem odległości na zasadzie rozpraszania widma sygnału nośnego zapomocą ciągu pseudolosowego.W roku 1969 Biuro Sekretarza Obrony (The Office of the Secretary of Defence - OSD) ustanowiłoprogram budowy obronnego systemu nawigacji satelitarnej (Defence Navigation Satellite System -DNSS), którego zadaniem było połaczenie dotychczasowych badań prowadzonych przez różneorganizacje i zbudowanie jednego - służącego wszystkim - systemu nawigacji satelitarnej. Powstaław ten sposób koncepcja systemu NAVSTAR GPS (NAVSTAR Global Positioning System),którypowinien zaspokoić potrzeby wszystkich użytkowników. Prace projektowe trwały do 1979 r.Pierwszego satelitę umieszczono na orbicie w lutym 1978 r. System jest obecnie w fazieoperacyjnej i spełnia wymagania postawione mu na początku lat 60. Zapewnia on ciągłe,trójwymiarowe określanie pozycji i prędkości użytkownika z dużą precyzją w skali globalnej,niezależnie od warunków meteorologicznych, oraz służbę czasu - (ang. UTC - CoordinatedUniversal Time).Konstelacja GPS składa się z 24 satelitów nawigacyjnych rozmieszczonych równomiernie nasześciu kołowych orbitach podsynchronicznych nachylonych pod kątem
. Krążąc na wysokości około 20183 km nad powierzchnią Ziemi satelity wykonują dwa obroty nadobę. Bez przerwy nadają one informację nawigacyjną w dwóch kanałach L1 (częstotliwość1575,42 MHz) i L2 (częstotliwość 1227,60 MHz). Częstotliwość obu sygnałów nośnych, a takżesygnały zegarowe sterujące generatory ciągów pseudolosowych, są uzyskiwane z tego samegowzorca atomowego o częstotliwości 10,23 MHz. Maksymalna niestabilność wzorca wynosi 10-12 nadobę.
Rys. 6.1. Widmo energetyczne na wyjściu nadajnika satelitowego: wyraźnie widać dużą gęstośćwidmową sygnału kluczowanego kodem C/A w kanale L1 i małą gęstość widmową sygnału
kluczowanego kodem P w kanałach L1 i L2
Sygnały nośne obu kanałów są rozpraszane za pomocą specjalnych binarnych kodówpseudolosowych (rys. 6.1). Mamy więc do czynienia z systemem szerokopasmowym zkluczowaniem fazy przebiegu nośnego. W systemie stosuje się dwa kody: standardowy C/A (ang.Coarse/Acquisition lub Clear/Acquisition) zapewniający powszechnie dostępną służbę określaniapozycji SPS (ang. Standard Positioning Service),i precyzyjny P, zapewniający precyzyjną służbęokreślania pozycji PPS (ang. Precise Positioning Service), dostępną tylko dla wojskowych iwybranych rządowych organizacji USA.
Rys. 6.2. Generator ciągów Golda
Kod C/A jest krótkim kodem, zawiera on 1023 bity, generowane z szybkością 1,023 Mb/s. KodC/A powtarza się co milisekundę. Każdy satelita nadaje inny ciąg kodowy wybrany z rodziny 1023ciągów Golda (rys. 6.2) w taki sposób, aby zapewnić możliwie małą korelację wzajemną międzyciągami nadawanymi przez poszczególne satelity. Dzięki temu maleją zakłócenia interferencyjneoraz ułatwia się identyfikację satelity i synchronizację odbiornika.
Służba SPS została - w sensie operacyjnym - uruchomiona w grudniu 1993 roku, kiedy stały siędostępne 24 satelity nawigacyjne prototypowe i operacyjne pierwszej generacji. Błąd określeniapozycji za pomocą kodu C/A nie przekracza 100 m (95%) w płaszczyźnie poziomej i 133 m (95%) wpłaszczyźnie pionowej. Oznacza to, że 95% wyznaczeń pozycji w ustalonym punkcie mieści się

Daniel Józef Bem, Nawigacja satelitarna Strona - -
17
wewnątrz okręgu o promieniu 100 m w płaszczyźnie poziomej i 133 m w płaszczyźnie pionowej.Błąd ten jest w głównej mierze spowodowany celowym wprowadzeniem przez Departament ObronyUSA (ang. Department of Defence - DOD) zakłóceń do efemeryd i zegarów satelitównawigacyjnych. Działanie to określa się jako wybiórczą dostępność (ang. Selective Availability -SA). Wybiórczą dostępność wprowadzono 25 marca 1990 r. Można się spodziewać, że DODzrezygnuje ze stosowania wybiórczej dostępności po roku 2000. Błąd określenia czasu UTC nieprzekracza 340 ns (95%).Kod P jest bardzo długim kodem, okres powtarzania wynosi 267 dób. Ciąg kodowy P jestgenerowany z szybkością 10,23 Mb/s. Każdemu satelicie przypisano odcinek tego kodu o długościjednego tygodnia. O północy z soboty na niedzielę generatory ciągu kodowego na satelitachrozpoczynają cykl pracy od początku. Sygnały nośne w obu kanałach są modulowane (kluczowane)ciągiem P, ciągi C/A występują tylko w kanale L1.Dzięki krótkiemu okresowi kodu C/A odbiornik łatwo osiąga synchroniczną pracę. Pozsynchronizowaniu się odbiornika z kodem C/A można przejść do śledzenia kodu P. Kod C/Aułatwia więc synchronizację startową. Bezpośrednie zsynchronizowanie odbiornika z kodem Pwymagałoby niesłychanie długiego czasu.Błąd określenia pozycji za pomocą kodu P wynosi 22 m (95%) w płaszczyźnie poziomej i 27,7 m(95%) w płaszczyźnie pionowej. Błąd określenia czasu nie przekracza 200 ns (95%), a prędkości -0,2 m/s (95%).
Nad prawidłową pracą systemu czuwa operacyjny segment sterowania OCS (ang. OperationalControl Segment). Zapewnia on utrzymanie satelitów na ustalonych pozycjach orbitalnych,monitoruje stan baterii słonecznych, poziom akumulatorów itp. OCS kontroluje stan zegarówsatelitowych, uaktualnia efemerydy i almanach raz na dobę lub w miarę potrzeby. OCS składa się zCentralnej Stacji Sterowania MCS (ang. Master Control Station) w Colorado Springs i kilkuodległych stacji monitorujących RMS (ang. Remote Monitor Station).
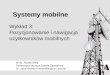
6.2. Konstelacja GPSKonstelacja GPS składa się z 24 satelitów nawigacyjnych rozmieszczonych na sześciu kołowychorbitach podsynchronicznych, po cztery satelity na każdej orbicie (rys. 6.3). Orbity są równomiernierozmieszczone wzdłuż równika, co 600. Inklinacja wszystkich orbit jest jednakowa i wynosi 550.Krążąc na wysokości około 20183 km nad powierzchnią Ziemi satelity wykonują dwa obroty nadobę syderyczną. Rysunek 6.4 przedstawia rzut płaski konstelacji z godziny 00.00 1 lipca 1993 roku(UTC). Każda orbita została "rozcięta" i "ułożona" na płaszczyźnie. Podobnie postąpiono zrównikiem ziemskim. Nachylenie odcinków reprezentujących orbity odpowiada ich inklinacjom,równym 550. Położenie orbit względem Ziemi opisują rektascencje węzłów wstępujących. Położeniesatelitów na orbitach określają anomalie średnie.
Rozwój satelitów nawigacyjnych GPS odbywał się w kilku fazach, poczynając od połowy lat 70. ijest ciągle kontynuowany. Satelity opracowane w poszczególnych fazach nazywa się blokami. BlokI obejmował satelity prototypowe, których zadaniem było sprawdzenie słuszność koncepcji iocenienie przydatności systemu GPS. Satelity tego bloku były umieszczane na orbitach w latach1978 1985. Jesienią 1995 roku wyłączono z ruchu ostatniego satelitę prototypowego. Blok IIobejmuje pierwsze satelity produkcyjne, blok IIA - udoskonalone satelity produkcyjne. Są oneobecnie używane jako satelity operacyjne. Blok IIR obejmuje satelity uzupełniające(rys. 6.5), będąone umieszczane na orbitach w latach 1997 - 2004. Po roku 2004 przewiduje się wprowadzeniebloku IIF.
Rys. 6.3. Konstelacja satelitów GP
Rys. 6.4. Rzut płaski konstelacji satelitów GPS

Daniel Józef Bem, Nawigacja satelitarna Strona - -
18
Rys. 6.5. Satelita GPS z bloku IIR
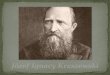
Wyposażenie nawigacyjne satelitów GPS (rys. 6.6) zapewnia odbiór danych z OCS, komunikacjęmiędzy satelitami (tylko satelity bloków IIR i IIF) oraz nadawanie sygnałów nawigacyjnych doużytkowników. Sygnały telemetryczne, rezultaty śledzenia satelitów i sygnały telesterowania sągromadzone w pamięci komputera pokładowego, który wykorzystuje je odpowiednio doprzygotowania informacji nawigacyjnej. Na pokładzie każdego satelity znajdują się dwa cezowe idwa rubidowe zegary atomowe (satelity bloku IIR są wyposażone w jeden cezowy i dwa rubidowezegary atomowe). Jeden z tych zegarów jest traktowany jako podstawowy i jest odniesieniem czasui częstotliwości dla wszystkich urządzeń nawigacyjnych. Pozostałe zegary stanowią redundancję.Generatory kodów pseudolosowych generują kody C/A i P, do których dodaje się modulo 2

Daniel Józef Bem, Nawigacja satelitarna Strona - -
19
informację nawigacyjną, a następnie doprowadza do nadajników pasma L. Nadajniki te tworząsygnały o rozproszonym widmie w kanałach L1 i L2, które są następnie wypromieniowane wkierunku Ziemi za pomocą odpowiednich anten.
Rys. 6.6. Wyposażenie nawigacyjne satelity GPS
6.3. Informacja nawigacyjnaKażdy satelita nadaje w obu kanałach jednakową informację nawigacyjną, umożliwiającąużytkownikowi systemu dokładne określenie położenia satelity. Informacja nawigacyjna zawiera1500 bitów i jest przesyłana z szybkością 50 b/s. Długość ramki zawierającej informacjęnawigacyjną wynosi więc 30 s. Ramka jest podzielona na 5 subramek, każda o długości 6 s (rys.6.7).
Każda subramka zawiera 10 słów trzydziestobitowych. Pierwsze słowo (TLM) zawiera informacjetelemetryczne, drugie (HOW - ang. Hand over Word) - umożliwia synchronizację odbiornika zkodem P. Pozostałe osiem słów w każdej subramce są informacjami nawigacyjnymiprzeznaczonymi dla użytkownika. Blok 1 zawiera dane umożliwiające korektę czasu, ze względu nadryf generatorów pokładowych, a także ze względu na opóźnienie fali w jonosferze. Bloki 2 i 3zawierają efemerydy satelity nadającego informację (tab. 6.1). Blok 4 jest wykorzystywany doprzesyłania informacji alfanumerycznej. Blok 5 (almanach) zawiera przybliżone informacje opołożeniu pozostałych satelitów. Informacje te nie mieszczą się w jednej subramce, do przesłaniapełnej informacji wykorzystuje się 19 kolejnych ramek. Almanach powtarza się więc co 570 s.
Rys. 6.7. Organizacja ramki informacji nawigacyjnej: TLM - informacja telemetryczna,HOW (ang. Hand over Word) - synchronizacja kodu P
Tabela 6.1Efemerydy satelitów GPS
Czas odniesienia
Pierwiastek kwadratowy z wielkiej półosi
Mimośród
Inklinacja (w momencie
)
Rektascencja węzła wstępującego (w epokach tygodniowych)
Argument perigeum (w momencie
)
Anomalia średnia ( w momencie
)
Szybkość zmiany inklinacji

Daniel Józef Bem, Nawigacja satelitarna Strona - -
20
Szybkość zmiany rektascencji węzła wstępującego
Korekcja średniego ruchu
Kosinusowy współczynnik korekcyjny dla argumentu szerokości
Sinusowy współczynnik korekcyjny dla argumentu szerokości
Kosinusowy współczynnik korekcyjny dla promienia orbity
Sinusowy współczynnik korekcyjny dla promienia orbity
Kosinusowy współczynnik korekcyjny dla inklinacji
Sinusowy współczynnik korekcyjny dla inklinacji
6.4. Określenie pozycji użytkownikaSystem GPS jest systemem odległościowym. Określenie pozycji użytkownika polega na pomiarzeodległości do wybranych satelitów nawigacyjnych i wyznaczenie powierzchni nawigacyjnych wpostaci sfer, których przecięcie się jest poszukiwaną pozycją. Pomiar odległości od odbiornikanawigacyjnego (użytkownika) do satelity nawigacyjnego odbywa się poprzez pomiar czasupropagacji fali elektromagnetycznej na trasie satelita - odbiornik nawigacyjny.
Rys. 6.8. Wektor pozycyjny użytkownika u, wektor pozycyjny satelity nawigacyjnego s w układziewspółrzędnych ECEF oraz wektor odległości r między użytkownikiem i satelitą
Tabela 6.2Obliczanie współrzędnych satelity GPS w układzie ECEF
(1) Wielka półoś
(2) Skorygowany ruch średni
(3) Upływ czasu od epoki efemeryd
(4) Anomalia średnia
(5) Anomalia mimośrodowa(rozwią-zanie iteracyjne względem

Daniel Józef Bem, Nawigacja satelitarna Strona - -
21
)
(6) Anomalia rzeczywista
(7) Argument szerokości
(8) Argument korekcji szerokości
(9) Korekcja promienia
(10) Korekcja inklinacji
(11) Skorygowany argument szerokości
(12) Skorygowany promień
(13) Skorygowana inklinacja
(14) Skorygowana rektascencja węzła
(15)
(16)
(17) Współrzędna x w układzie ECEF
(18) Współrzędna y w układzie ECEF
(19) Współrzędna z w układzie ECEF

Daniel Józef Bem, Nawigacja satelitarna Strona - -
22
Rys. 6.8. Pomiar czasu propagacji fali elektromagnetycznej na trasie satelita nawigacyjny -odbiornik poprzez określenie maksimum funkcji korelacji wzajemnej ciągu pseudolosowego
generowanego na satelicie i repliki tego kodu wytwarzanego w odbiorniku nawigacyjnym
Na rysunku 6.7 pokazano użytkownika, którego położenie określa w układzie ECEF wektorpozycyjny u (nieznany) o składowych i satelitę nawigacyjnego, którego położenie w tym samym układzie współrzędnych określa wektor
pozycyjny s (znany po zdekodowaniu informacji nawigacyjnej, patrz tabela X.3) o składowych; odległość od użytkownika do satelity nawigacyjnego opisuje wektor r. Między wektorami r, s, i uzachodzi związek
(6.1)Moduł wektora odległości
(6.2) jest znany na podstawie pomiaru czasu propagacji fali elektromagnetycznej.Pomiar czasu propagacji fali elektromagnetycznej na trasie satelita - użytkownik ilustruje rysunek6.8. Charakterystyczny element sygnału pseudolosowego zostaje wypromieniowany z satelity wmomencie. Element ten dociera do odbiornika nawigacyjnego w momencie, po upływie Dt sekund potrzebnych na przebycie przez falę elektromagnetyczną odległości r. Wodbiorniku nawigacyjnym wyznacza się maksimum funkcji korelacji wzajemnej ciągupseudolosowego nadawanego przez satelitę i repliki tego ciągu odtworzonej w odbiorniku.Położenie tego maksimum wyznacza czas propagacji fali Dt. Gdyby zegar satelity i zegar odbiornikabyły zsynchronizowane z czasem systemowym, to - po pomnożeniu Dt przez prędkośćrozchodzenia się fal elektromagnetycznych c - otrzymalibyśmy odległość geometryczną odbiornikanawigacyjnego od satelity
Odległość geometryczna =
= cDt, (6.3)
przy czym:
- czas systemowy, w którym sygnał nawigacyjny został wypromieniowany z satelity;
- czas systemowy, w którym sygnał nawigacyjny dotarł do odbiornika nawigacyjnego.
Rys. 6.9. Zależności czasowe przy pomiarze odległości do satelity GPS:
- czas systemowy, w którym sygnał nawigacyjny został wypromieniowany z satelity;
- czas systemowy, w którym sygnał nawigacyjny dotarł do odbiornika użytkownika;dt - przesunięcie czasu zegara na satelicie względem czasu systemowego;
- przesunięcie czasu zegara w odbiorniku użytkownika względem czasu systemowego;

Daniel Józef Bem, Nawigacja satelitarna Strona - -
23
- odczyt zegara satelitowego w momencie, w którym sygnał nawigacyjny został wypromieniowany zsatelity;
- odczyt zegara w odbiorniku użytkownika w momencie, w którym dotarł do niego sygnałnawigacyjny
W rzeczywistości satelity są wyposażone w bardzo stabilne zegary atomowe, które jednak nie sązsynchronizowane z czasem systemowym. Zegary satelitowe wykazują więc pewne przesunięciedt w stosunku do czasu systemowego (przyśpieszenie jest dodatnie, opóźnienie - ujemne). Zegar wodbiorniku nawigacyjnym nie jest również zsynchronizowany z czasem systemowym; występujeprzesunięcie
czasu użytkownika względem czasu systemowego. Zależności czasowe występujące podczaspomiaru czasu propagacji fali elektromagnetycznej w systemie GPS ilustruje rysunek 6.9.
W rzeczywistości w wyniku określenia maksimum funkcji korelacji wzajemnej nie mierzymy czasuDt, odpowiadającego odległości geometrycznej między satelitą i odbiornikiem nawigacyjnym, leczczas Dt +. Przesunięcie czasu zegara na satelicie względem czasu systemowego dt jest mierzone przezOCS i wprowadzane do informacji nawigacyjnej. Odbiornik nawigacyjny może więc dokonaćodpowiedniej korekty. Pozostaje jednak przesunięcie czasu zegara w odbiorniku użytkownikawzględem czasu systemowego. Odbiornik nawigacyjny mierzy więc nie czas Dt, lecz czas DDt +. Jeśli ten czas pomnożymy przez prędkość rozchodzenia się fali elektromagnetycznej, to nieotrzymamy odległości geometrycznej między satelitą i odbiornikiem nawigacyjnym, lecz tzw.pseudoodległość
Pseudoodległość = cD= c(Dt +.) = r + c. (6.5)Określenie pozycji użytkownika w układzie ECEF wymaga więc wyznaczenia trzech składowychwektora pozycyjnego użytkownikaoraz różnicy. między czasem lokalnym użytkownika i czasem systemowym. Rozwiązanie tak postawionegozadania nawigacyjnego wymaga pomiaru pseudoodległości co najmniej do czterech satelitównawigacyjnych i rozwiązania następującego układu równań
(6.6)W formie rozwiniętej układ równań (6.6) ma postać
(6.7a)
(6.7b)
(6.7c)
(6.7d)przy czym
są współrzędnymi czterech satelitów nawigacyjnych w układzie ECEF.Rozwiązania układu nieliniowych równań (6.7) można dokonać w trojaki sposób: (1) znaleźćrozwiązanie w formie zamkniętej, (2) zastosować technikę iteracyjną po wcześniejszej linearyzacjiukładu, (3) zastosować filtrację Kalmana.W metodzie iteracyjnej zakładamy, że znane jest wstępne oszacowanie położenia użytkownikai przesunięcia czasu. Rozwijamy wyrażenia na pseudoodległości w szereg Taylora w otoczeniu przybliżonego położeniaużytkownika i zachowujemy tylko człony liniowe; otrzymujemy wówczas układ czterech równań

Daniel Józef Bem, Nawigacja satelitarna Strona - -
24
liniowych
DDDD (6.8)
j = 1,2,3,4;w którym:
j = 1,2,3,4.Po rozwiązaniu układu równań (6.8) otrzymuje się nowe przybliżenie pozycji i czasu użytkownika:
D (6.9a)
D (6.9b)
D (6.9c)
D (6.9d)Proces iteracyjny można powtarzać wielokrotnie. Zbieżność procesu iteracji i dokładnośćotrzymanych wyników zależą od tego, jak dobrze dokonano oszacowania wstępnego położenia iczasu użytkownika.Układ równań (6.9) można zapisać w postaci macierzowej
Dr = HDx, (6.10)w której:
Dr;
Dx
Formalnie rozwiązanie równania macierzowego można zapisać w postaciDx =
Dr. (6.11)Współczesne odbiorniki nawigacyjne są odbiornikami wielokanałowymi (nawet do dwunastukanałów). Odbiorniki te umożliwiają śledzenie większej liczby niż czterech satelitów (jeśli sąwidoczne). Prowadzi to do nadokreślongo układu równań dla pseudoodległości, który rozwiązuje sięmetodą najmniejszych kwadratów. W ten sposób można zwiększyć dokładność określenia pozycjiużytkownika.Macierz H ma wówczas postać

Daniel Józef Bem, Nawigacja satelitarna Strona - -
25
, (6.12)
przy czym N – liczba satelitów, do których wykonano pomiar odległości.Residuum
. (6.13)
Minimum kwadratu residuum
. (6.14)
Poprawka
. (6.15)
6.5. Błąd określenia pozycji użytkownikaPomiar pseudoodległości jest obarczony różnymi błędami: niestabilności zegara satelity,perturbacjami w ruchu satelity, błędami w prognozowaniu efemeryd, opóźnieniem falielektromagnetycznej w jonosferze i troposferze, propagacją wielodrogową, szumem termicznymodbiornika. Szczególnym rodzajem błędu jest tzw. wybiórcza dostępność SA (ang. SelectiveAvailability). Jest to wprowadzany świadomie przez DOD błąd w prognozowaniu efemeryd satelitóworaz błąd w określeniu czasu systemowego. Selektywną dostępność stosowano od 25 marca 1990r. do 30 kwietnia 2000 r. tylko w standardowej służbie określania pozycji (kod C/A). Wartościróżnych błędów podano w tabeli 6.3. Jest to jednosigmowy błąd określenia pseudoodległościwyrażony w metrach. Pierwiastek kwadratowy z sumy kwadratów błędów cząstkowych określacałkowity błąd systemowy określenia pseudoodległości UERE (ang. User Equivalent Range Error).
Tabela 6.3.
Budżet błędu określania pseudoodległosci w systemie GPS
Błąd jednosigmowy [m]
Segment Źródło błędu PPS SPSz SA
SPSbez S.A.
Kosmiczny Niestabilność zegara satelityPerturbacje ruchu satelityDostęp selektywnyInne
3,01,0-
0,5
3,0 1,032,3 0,5
3,01,0-
0,5
Sterowanie Błąd predykcji efemerydInne
4,20,9
4,2 0,9
4,20,9
Użytkownik Opóźnienie jonosferyczneOpóźnienie troposferyczneSzum termiczny i rozdzielczość odbiornikaPropagacja wielodrogowaInne
2,32,01,51,20,5
5,0 1,5 1,5 2,5 0,5
5,01,51,52,50,5
Błąd całkowity UERE 6,5 33,3 8,0
Błąd UERE mówi tylko o dokładności pomiaru pseudoodległości. Błąd określenia pozycji

Daniel Józef Bem, Nawigacja satelitarna Strona - -
26
użytkownika zależy jeszcze od rozmieszczenia satelitów nawigacyjnych na firmamencie w stosunkudo użytkownika. Wpływ rozmieszczenia satelitów na dokładność określenia pozycji dla przypadkudwuwymiarowego ilustruje rys. 6.10. Gdy satelity znajdują się blisko siebie, wówczas błądokreślenia pozycji jest duży.
Błąd określenia pozycji użytkownika w systemie GPS można scharakteryzować następującymwyrażeniem (Błąd określenia pozycji) = = (Błąd pomiaru pseudoodległości) ́(Współczynnik geometryczny) (6.16)
Za błąd pomiaru pseudoodległości można przyjąć UERE, który jest gaussowską zmienną losową owartości średnie równej 0 i o odchyleniu standardowym
(tab. 6.3). Współczynnik określa wzrost błędu określenia pozycji ze względu układ satelitównawigacyjnych względem użytkownika (rys. 6.10). Zwykle mówi się o geometrycznym zmniejszeniudokładności określenia pozycji użytkownika GDOP (ang. Geometric Diulution of Precision). Znajlepszym rozmieszczeniem satelitów mamy do czynienia wówczas, gdy jeden z satelitów znajdujesię w zenicie nad użytkownikiem, a pozostałe trzy możliwie nisko nad horyzontem rozmieszczonerównomiernie co 120°.
Rys. 6.10. Wyjaśnienie wpływu rozmieszczenia satelitów na dokładność określenia pozycjiużytkownika (przypadek dwuwymiarowy)
Na ogół rozróżnia się błąd określenia pozycji w płaszczyźnie pionowej i poziomej. Błąd określeniapozycji w płaszczyźnie pionowej dz ma rozkład N(0, VDOP
), tzn. rozkład normalny z zerową wartością średnią i odchyleniem standardowym VDOP
, przy czym VDOP (ang. Vertical Dilution of Precision) jest geometrycznym zmniejszeniemdokładności w płaszczyźnie pionowej.
Statystycznie błąd określenia pozycji w płaszczyźnie pionowej wyraża się zależnością
(6.17)w której UERE jest zmienną losową o rozkładzie N(0,). Odchylenie standardowe zmiennej losowej dz
(6.18)Rozkład gaussowski charakteryzuje się tym, że w przedziale o sszerokości ±1s względem wartościśredniej znajduje się 68% wyników pomiarów. W przybliżeniu 95% wyników pomiarów mieści się wprzedziale o szerokości ±2s względem wartości średniej; można więc zapisać równanie
(6.19)Przypuśćmy, że w pewnym momencie dla określonego układu użytkownika względem satelitównawigacyjnych VDOP = 2. Dla kodu C/A z włączoną selektywną dostępnościąm (patrz tab. 6.3 ), więc
Oznacza to, że prawdopodobieństwo, iż błąd określenia pozycji będzie większy niż 113,2 metra nieprzekracza 5%.Do kreślenia błędu określenia pozycji w płaszczyźnie poziomej wprowadza się często pojęcieprawdopodobnego błędu kołowego CEP (ang. Circular Error Probable). Jest to promień koła ześrodkiem w prawdziwej (bezbłędnej) pozycji użytkownika obejmującego 50% wykonanychpomiarów. Innymi słowy prawdopodobieństwo tego, że błąd pomiaru jest mniejszy niż wartość CEPwynosi dokładnie 1/2. CEP wyraża się następującą zależnością przybliżoną
(20)Przez rozumiemy promień koła ze środkiem w prawdziwej pozycji użytkownika, które obejmuje xx%wyników pomiarów obarczonych błędami. Oczywiście

Daniel Józef Bem, Nawigacja satelitarna Strona - -
27
Obowiązują następujące zależności przybliżone:
(6.21a)
(6.21b)
(6.21c)Powiedzmy, że w pewnym momencie i w pewnej konfiguracji satelitów względem użytkownikaHDOP = 1,5. Jeśli użytkownik korzysta z kodu C/A i jest włączona wybiórcza dostępność, to
Oznacza to, że w 95% przypadków wynik określenia pozycji znajdzie się kole o średnicy około 100metrów, którego środek pokrywa się z pozycją rzeczywistą. Zwróćmy uwagę, że dominującymźródłem błędu jest wybiórcza dostępność. Przy wyłączonej SA mielibyśmy
co jest bardzo atrakcyjnym rezultatem.
6.6. Efekty relatywistyczneZegary pokładowe satelitów nawigacyjnych są pod wpływem dwóch efektów relatywistycznychwynikających ze szczególnej i ogólnej i teorii względności Einsteina. Pierwszy efekt jest związanyze zmianą chodu zegara znajdującego się w ruchu - “szybkie zegary chodzą wolno” - wynikającąze szczególnej teorii względności. Generator umieszczony na satelicie generuje więc mniejszączęstotliwość niż ta, na którą został ustawiony.
Drugi efekt jest związany z zasadą równoważności, zgodnie z którą chód zegara ulega zwolnieniuprzy zbliżaniu się do środka pola grawitacyjnego. W odniesieniu do generatora umieszczonego nasatelicie te dwa efekty działają w przeciwnych kierunkach. W przypadku satelity poruszającego siępo orbicie o promieniu równym półtora promienia Ziemi oba efekty wzajemnie kompensują się.Satelity systemu GPS poruszają się jednak po orbitach o promieniach równych około 4,2 promieniaZiemi. Zegary umieszczone na tych satelitach chodzą więc szybciej niż zegary znajdujące się napowierzchni Ziemi. Całkowity błąd z tego tytułu wynosi 38,4 ms w ciągu doby, co odpowiada 11,5km błędu w określeniu odległości.
Wymienione efekty relatywistyczne są kompensowane przez ustawienie częstotliwości zegarówsatelitowych nieco poniżej częstotliwości nominalnej - 10,22999999545 MHz. Częstotliwość widziana przez obserwatora na powierzchni morza jest natomiast równa 10,23 MHz, co oznacza, żeużytkownik nie musi wprowadzać korekcji na omawiane efekty relatywistyczne.
Użytkownik musi natomiast wprowadzać korekcję ze względu na inny periodyczny efektrelatywistyczny, wynikający z niewielkiej ekscentryczności orbit satelitów nawigacyjnych. Połowatego efektu jest związana z okresową zmianą prędkości satelity względem układu współrzędnychECI, druga połowa jest związana ze zmianą położenia satelity w ziemskim polu grawitacyjnym.
Rys. 6.11. Efekt Sagnaca
W związku z obrotem Ziemi w czasie transmisji sygnału z satelity do odbiornika nawigacyjnegopowstaje kolejny efekt relatywistyczny, zwany efektem Sagnaca, polegający na zmianiepseudoodległości związanej z szybkim ruchem użytkownika względem Ziemi (rys. X.25).
6.7. Różnicowe systemy GPSBłąd określenia pozycji użytkownika stosującego kod C/A jest dość duży. Nawet przy wyłączonejselektywnej dostępności błąd określenia pozycji wynosi około 25 m (95%) w płaszczyźnie poziomeji około 45 m (95%) w płaszczyźnie pionowej, co w wielu zastosowaniach niedopuszczalne. Poprawędokładności określenia pozycji można uzyskać wprowadzając różnicowy system określania pozycjiDGPS (ang. Differential GPS). Opracowano wiele różnicowych systemów określania pozycji, którebardzo ogólnie można podzielić na systemy lokalne LADGPS (ang. Local Area DGPS) i systemywielko obszarowe WADGPS (ang. Wide

Daniel Józef Bem, Nawigacja satelitarna Strona - -
28
Rys. 6.12. Koncepcja lokalnego różnicowego systemu określania pozycji LADGPS
Pierwsze z nich polegają na zastosowaniu naziemnej stacji odniesienia, której położenie jest dobrzeznane (rys. 6.12). Stacja ta określa swoją pozycję na podstawie odbioru sygnałów nadawanychprzez satelity nawigacyjne GPS, porównuje ją z pozycją rzeczywistą, oblicza poprawki i nadaje je zapomocą nadajnika naziemnego pracującego w różnych zakresach częstotliwości. Na przykład doobsługi samolotów stosuje nadajniki VHF, statków nadajniki MF. Koncepcja LADGPS opiera się nazałożeniu, że wiele czynników powodujących błąd określenia pozycji są silnie skorelowane. Wobectego użytkownik po określeniu swojej pozycji za pomocą sytemu GPS może ją skorygowaćwprowadzając poprawki pozycji nadawane przez stację odniesienia. Ten sposób można stosowaćtylko w niewielkiej odległości od stacji odniesienia. Lepszym rozwiązaniem jest określenie przezstację odniesienia poprawek do pseudoodległosci i przesyłanie ich do użytkowników. Budżet błęduokreślenia pozycji w tym przypadku podano w tabeli 6.4.
Tabela 6.4Budżet błędu określania pseudoodległosci w systemie LADGPS
Segment Źródło błędu Błąd jednosigmowy [m]
GPS LADGPS
Kosmiczny Niestabilność zegara satelityPerturbacje ruchu satelityDostęp selektywnyInne
3,0 1,032,3 0,5
0000
Sterowanie Błąd predykcji efemerydInne
4,2 0,9
00
Użytkownik Opoźnienie jonosferyczneOpóźnienie troposferyczneSzum termiczny i rozdzielczość odbiornikaPropagacja wielodrogowaInne
5,0 1,5 1,5 2,5 0,5
00
2,1 2,5 0,5
Błąd całkowity UERE 33,3 3,3
Tak dobre rezultaty uzyskuje się tylko w bezpośrednim sąsiedztwie stacji odniesienia. W miaręoddalania się użytkownika od tej stacji następuje stopniowa dekorelacja błędów określeniapseudoodległości, co powoduje wzrost całkowitego błędu określenia pozycji. Stwierdzono jednakznaczne zmniejszenie
nawet w odległości 400 km od stacji odniesienia. Wydaje się więc, że warto zastosować systemLADGPS w systemie monitorowania ruchu pojazdów w Polsce. Sygnały różnicowe mogłabynadawać budowana obecnie w Solcu Kujawskim długofalowa stacja Polskiego Radia. Stacja tabędzie dobrze odbierana na obszarze całego kraju. System różnicowy jest skuteczny tylkowówczas, gdy stacja odniesienia i użytkownik odbierają sygnały z tych samych satelitównawigacyjnych. Przy dużych odległościach od stacji odniesienia może się zdarzyć, że odbiornikużytkownika wybierze inny układ odniesienia niż odbiornik stacji odniesienia. Stacja odniesienia

Daniel Józef Bem, Nawigacja satelitarna Strona - -
29
oprócz sygnałów różnicowych powinna więc nadawać również informację o numerach satelitównawigacyjnych, z których korzysta. Sprawa ta wymaga szczegółowego opracowania.
Wielkoobszarowe systemy różnicowe mogą obsługiwać całe kontynenty, a nawet cały glob.Wymagają one stosowanie wielu współpracujących ze sobą stacji odniesienia. Systemy WADGPSnie mają znaczenia dla opracowywanego w Polsce sytemu monitorowania ruchu pojazdów, niebędą więc szczegółowo omawiane.
BibliografiaBem D. J., Systemy szerokopasmowe, Rozprawy Elektrotechniczne, t. 31, 1985, nr 1, s. 241-263.
Bem D.J., Systemy telekomunikacyjne. Część III - Radiolokacja i radionawigacja, WydawnictwoPolitechniki Wrocławskiej, Wrocław 1991.Hofmann-Wellen B., Lichteneger H., Collins J., GPS NAVSTAR User's Overview, New York, Spiger- Verlag, 19933.Kaplam E. D., (editor), Understanding GPS. Principles and Applications, Artech House, Boston,London, 1996.NAVSTAR GPS Joint Program Office(JPO), GPS NAVSTAR User's Overview, YEE-82-009D, GPSJPO, March 1991.Szymoński M., Nawigacyjne wykorzystanie sztucznych satelitów Ziemi. WKiŁ, Warszawa 1989.








![[Aeroklub PRL] - Szkolenie Samolotowe - Nawigacja Pilota Sportowego](https://img.pdfslide.net/doc/110x75/55cf9727550346d0338ffd27/aeroklub-prl-szkolenie-samolotowe-nawigacja-pilota-sportowego.jpg)