Embed Size (px)
Citation preview

Daniel StrebelEduardo Hernández Marquina
Advanced Functional Programming
PASTURE

The board:
A grid where the different elements are going to interact.
The Problem

Elements
»Fences:• Static elements
»Grass:• Procreate
The Problem Cont.
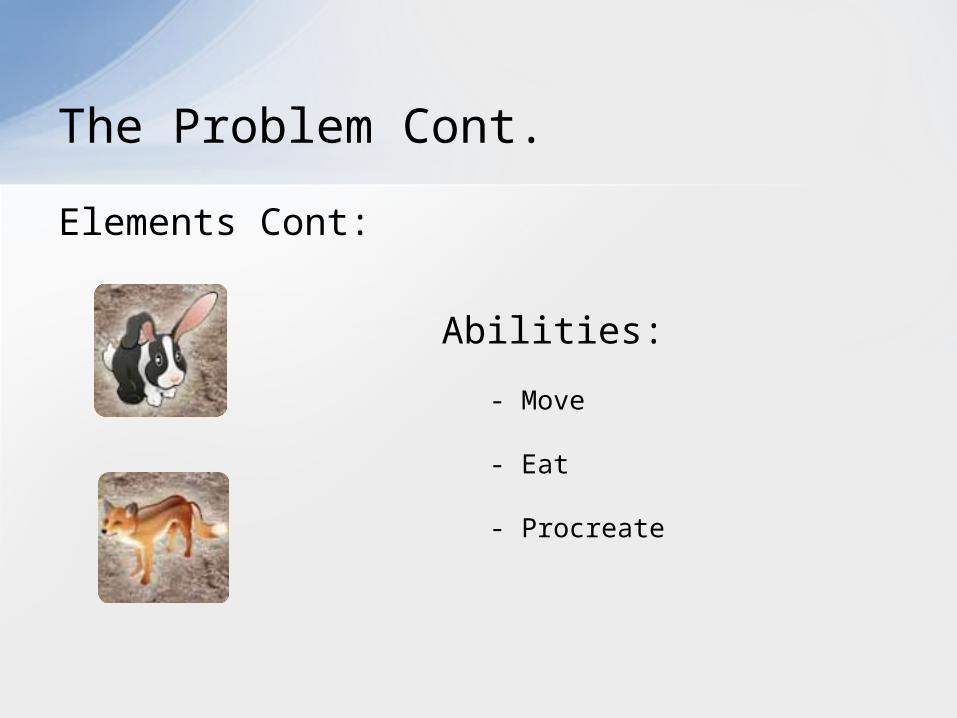
Elements Cont:
Abilities:
- Move
- Eat
- Procreate
The Problem Cont.

Design
GameBoard
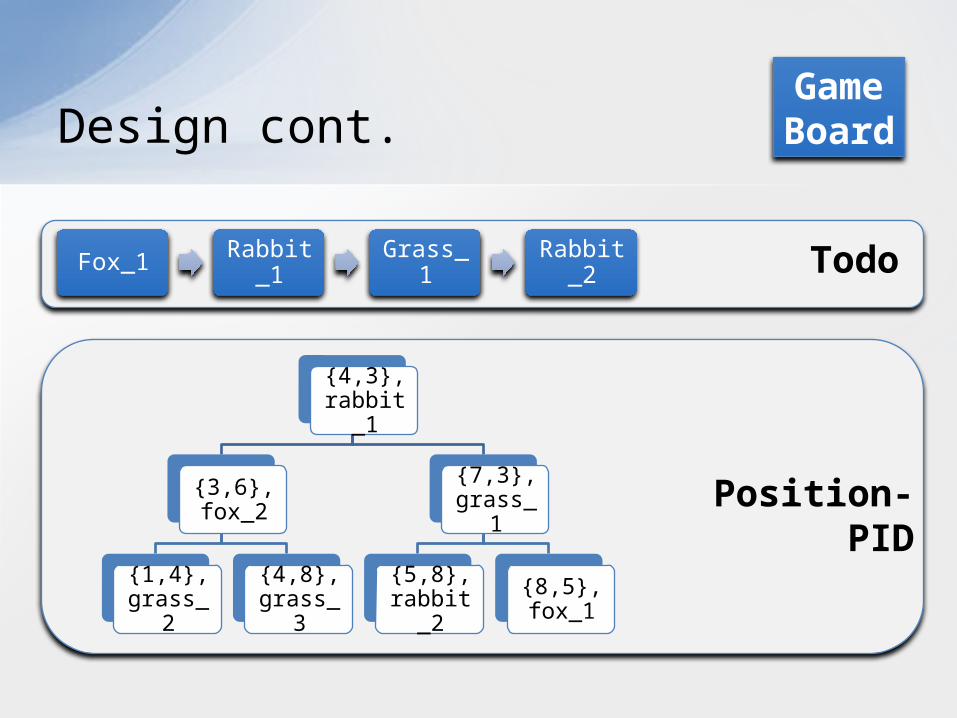
Design cont.
Fox_1 Rabbit_1
Grass_1
Rabbit_2
{4,3}, rabbit_
1
{3,6}, fox_2
{1,4}, grass_2
{4,8}, grass_3
{7,3}, grass_1
{5,8}, rabbit_
2
{8,5}, fox_1
GameBoard
Todo
Position-PID

Design cont.GameBoard
Initialization
Todo > 0
Build new Todo
Wait for Message
NO
YES
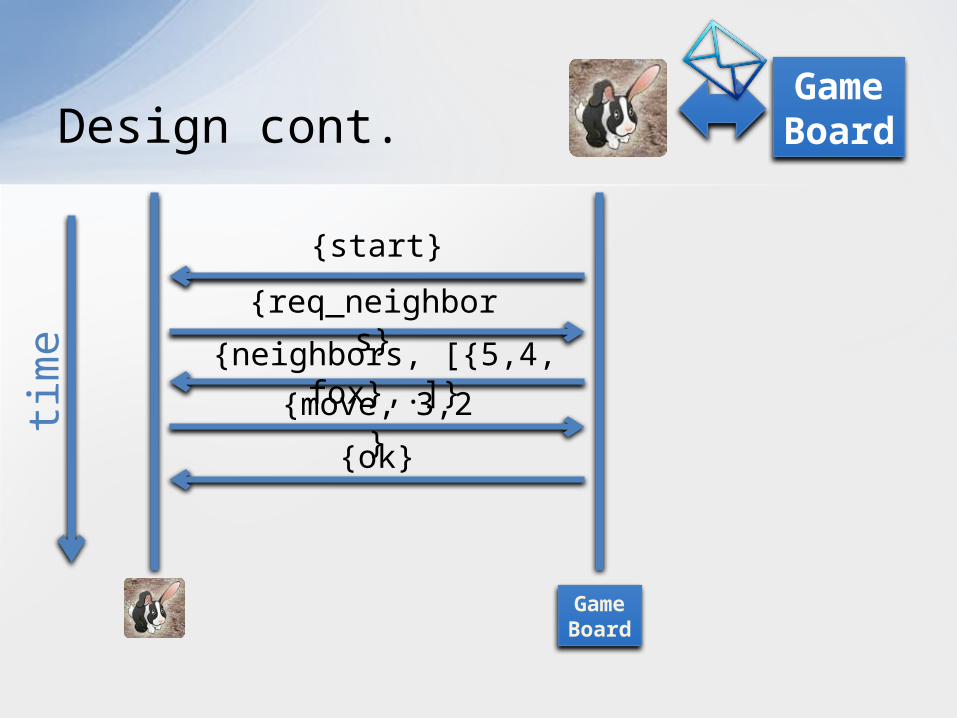
Design cont.GameBoard
GameBoard
tim
e
{start}
{move, 3,2 }{ok}
{req_neighbors}{neighbors, [{5,4,
fox},.]}
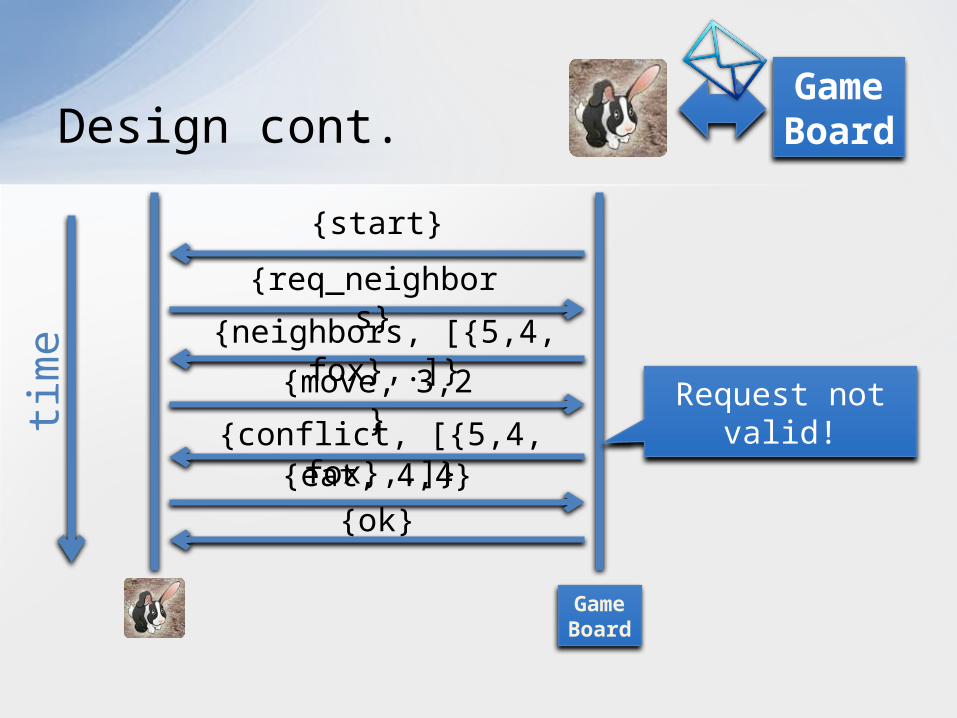
Design cont.GameBoard
GameBoard
tim
e
{start}
{move, 3,2 }{conflict, [{5,4,
fox},.]}
{req_neighbors}{neighbors, [{5,4,
fox},.]}
{eat, 4,4}
Request not valid!
{ok}

Demo

• Missing AI- Now action choices are random.
• How to add simple AI?- Need to know the positions around.- Develop action priorities.
1.- Stay alive: scape from predators or eat.2.- To find food: move away from borders.
Limitations
Algorithms
Atoms for element types
Code sharing between animals
Used libraries
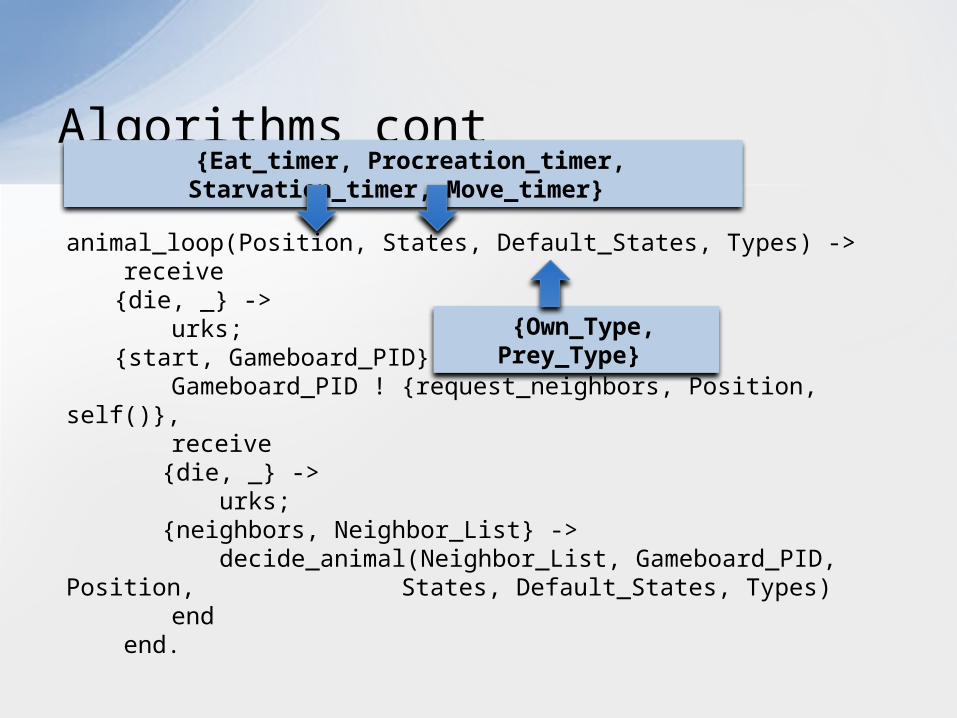
Algorithms cont
animal_loop(Position, States, Default_States, Types) -> receive
{die, _} -> urks;{start, Gameboard_PID} -> Gameboard_PID ! {request_neighbors, Position, self()}, receive
{die, _} -> urks;{neighbors, Neighbor_List} -> decide_animal(Neighbor_List, Gameboard_PID,
Position, States, Default_States, Types)
end end.
{Eat_timer, Procreation_timer, Starvation_timer, Move_timer}
{Own_Type, Prey_Type}
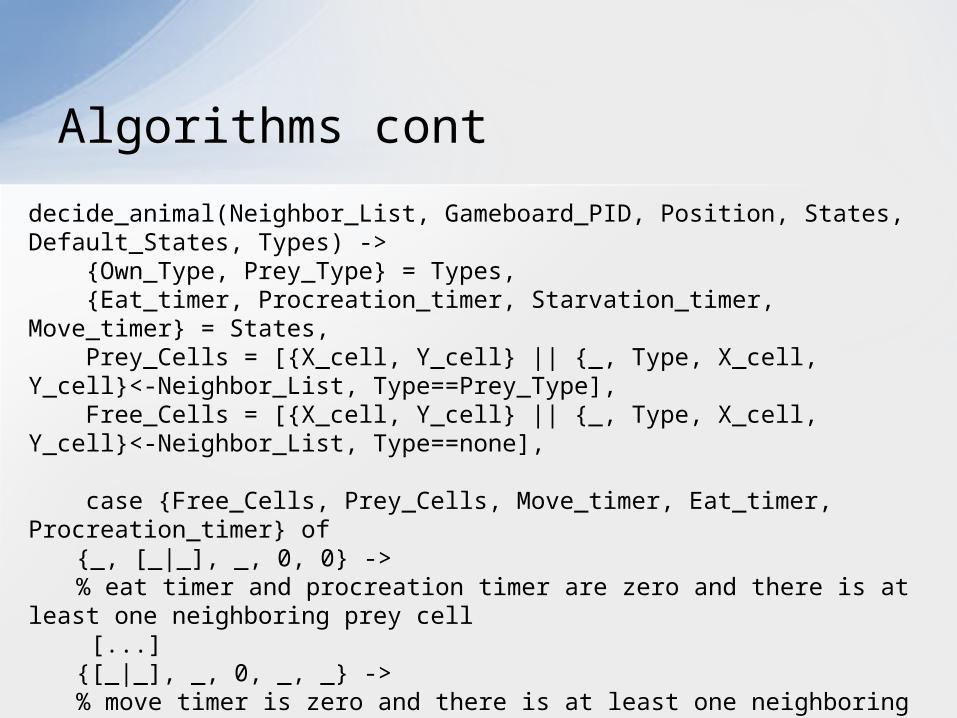
Algorithms cont
decide_animal(Neighbor_List, Gameboard_PID, Position, States, Default_States, Types) -> {Own_Type, Prey_Type} = Types, {Eat_timer, Procreation_timer, Starvation_timer, Move_timer} = States, Prey_Cells = [{X_cell, Y_cell} || {_, Type, X_cell, Y_cell}<-Neighbor_List, Type==Prey_Type], Free_Cells = [{X_cell, Y_cell} || {_, Type, X_cell, Y_cell}<-Neighbor_List, Type==none],
case {Free_Cells, Prey_Cells, Move_timer, Eat_timer, Procreation_timer} of
{_, [_|_], _, 0, 0} -> % eat timer and procreation timer are zero and there is at least
one neighboring prey cell [...]{[_|_], _, 0, _, _} -> % move timer is zero and there is at least one neighboring empty
cell [...]{_, _, _, _, _} -> % no possible actions [...]
end.
Why this produces correct results
Gameboard in charge -> consistentElements can always select a possible actions -> no dead locks, single turns will terminate
Order of execution is not guaranteed ->Non-deterministic behaviour

Difficult cases
Find all possible cases of inconsistencyWhat should be done in conflict situations?
Why the heck is there a dead lock???

??!! *?#~!
http://code.google.com/p/pasture-uu-ht11/