Embed Size (px)
DESCRIPTION
"DARwIn-OP (Dynamic Anthropomorphic Robot with Intelligence – Open Platform) is an affordable, miniature-humanoid-robot platform with advance computational power, sophisticated sensors, high payload capacity, and dynamic motion ability to enable many exciting research, education, and outreach activities. Sponsored by the National Science Foundation (NSF) in the United States, DARwIn-OP is developed by RoMeLa at Virginia Tech in collaboration with Robotis Co., DARwIn-OP is a true open platform where users are encouraged to modify it in both hardware and software, and various software implementations are possible (C++, Python, LabVIEW, MATLAB, etc.) The open source hardware is not only user serviceable thanks to its modular design, but also can be fabricated by the user. Publically open CAD files for all of its parts, and instructions manuals for fabrication and assembly are available on-line for free. DARwIn-OP can also be purchased from Robotis as a product.
Citation preview

Open Platform Humanoid ProjectOpen Platform Humanoid Project
DARwIn-OP
A Open Architecture, Miniature
Humanoid Robot Platform for Research,
Education and Outreach
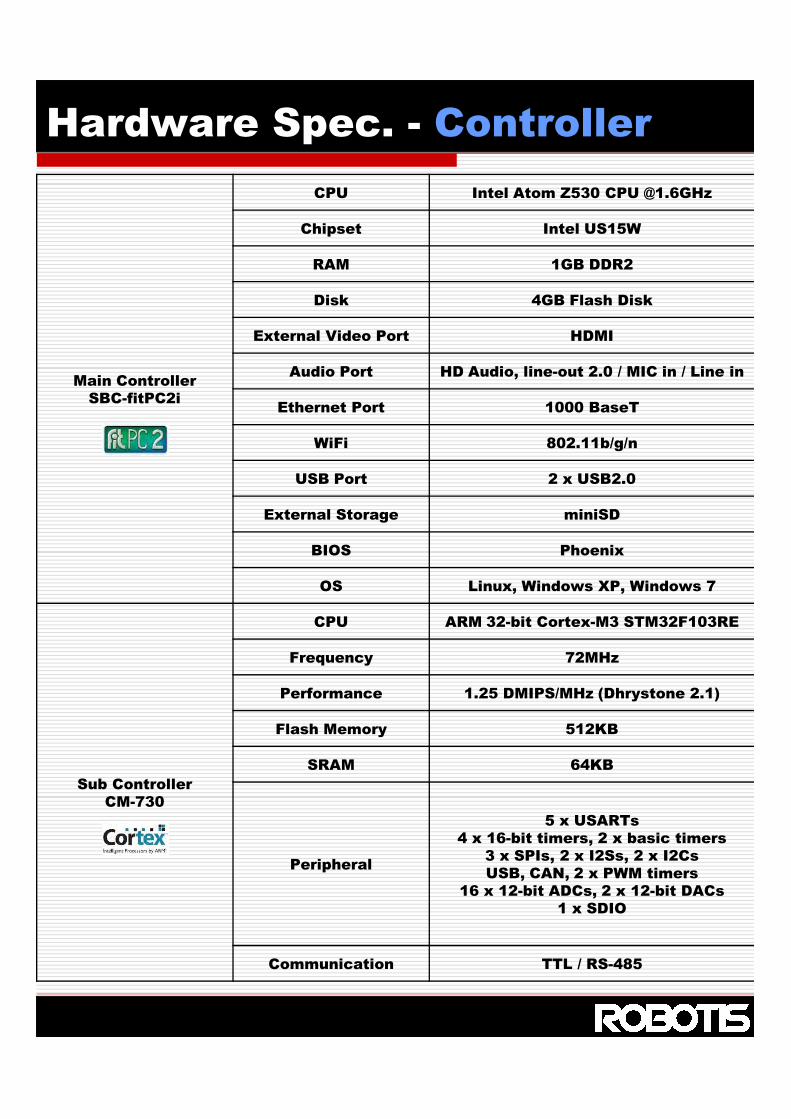
Hardware Spec. - Controller
Main Controller
SBC-fitPC2i
CPU Intel Atom Z530 CPU @1.6GHz
Chipset Intel US15W
RAM 1GB DDR2
Disk 4GB Flash Disk
External Video Port HDMI
Audio Port HD Audio, line-out 2.0 / MIC in / Line in
Ethernet Port 1000 BaseT
WiFi 802.11b/g/n
USB Port 2 x USB2.0
External Storage miniSD
BIOS Phoenix
OS Linux, Windows XP, Windows 7
Sub Controller
CM-730
CPU ARM 32-bit Cortex-M3 STM32F103RE
Frequency 72MHz
Performance 1.25 DMIPS/MHz (Dhrystone 2.1)
Flash Memory 512KB
SRAM 64KB
Peripheral
5 x USARTs
4 x 16-bit timers, 2 x basic timers
3 x SPIs, 2 x I2Ss, 2 x I2Cs
USB, CAN, 2 x PWM timers
16 x 12-bit ADCs, 2 x 12-bit DACs
1 x SDIO
Communication TTL / RS-485

Hardware Spec. - Device
Actuator
RX-28M
Holding Torque 24kgf.cm @ 12V
Speed 45RPM @ No Load
Motor Maxon Coreless DC Motor
Position Sensor Magnetic Potentiometer
Gear Ratio 1 : 193
Resolution 0.29°Size 35.5mm x 50.8mm x 41.8mm
Weight 72g
Network Interface TTL / Up To 4.5MBPS
FeedbackPosition / Speed / Temperature /
Alarm
Gyroscope 3-Axis LYPR540AH
Sensor
Gyroscope 3-Axis LYPR540AH
Accelerometer 3-Axis ADXL335
Pressuremeter 2 x 4 FSR in Foot
Camera 2MP HD Logitech C905 Camera
Sound
Speaker 8ohm 1W 1 x MIC in Body
MIC 2 x MIC in Ear / 1 x MIC in Head
Display
Head LED 1 x RGB LED
Eye LED 1 x RGB LED
Body LED 6 x LED, 2 x RGB LED
Button & Switch
Body Button 3 x Push Button
Power Switch 1 x Toggle Switch
Power
SMPSin 100V-240V 50/60Hz / out 12V
5000mA
Battery Li-Po 3CELL 11.1V 1000mA

Hardware Spec. - Mechanics
Dimension
Height 454mm
Foot 66mm x 104mm
Leg 250mm
Arm 214mm
Weight 2.76Kg
DOF
Head 2 DOF
Arm 2 x 3 DOFDOF Arm 2 x 3 DOF
Leg 2 x 6 DOF

Software Spec. – Overall
Software
O/S Linux Ubuntu / Windows XP / Windowx 7
Framework open-DARwIn SDK
Programming
LanguageC / C++ / Java / Phython / Perl
Compiler gcc / MS Visual Studio
Motion Editor motion-DARwIn TCP/IP
Development
EnvironmentEclipse / QEditor
Code Management SubversionCode Management Subversion
Remote Management SAMBA