Embed Size (px)
Citation preview

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 1/32
Hardware Software
Circuit drawingPattern drawingCircuit explanation
Parts explanation
Flow chartListProcessing explanation
AssemblyAdjustment
PIC Circuits Gallery
DC motor speed controller
I will introduce the constant speed controller for DC motorIt detects and controls the rotational speed of the motor !hen lower than the specificationspeed" it increases a control electric current !hen higher than the specification speed" itreduces a control electric current It is possible to use when wanting to #eep constant speed
e$en if the load to the motor changes!ith the circuit this time" I used a motor for the speed detection apart from the main unitmotor %he speed can be detected in the other way" too L&Ds are lit up to confirm thecontrol situation of the motorA circuit li#e 'Light controller ' is used for the control unit of this circuit
Circuit explanationfor DC motor speed controller
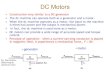
Control $oltage input circuit
%his is the circuit which inputs the control
$oltage which was created by the turning ofthe motor in PIC %he input $oltage to PIC iscon$erted by A(D con$erter Changed $oltageis used for the P!) function of the CCP tocontrol the motor dri$e At the circuit thistime" a small motor is used as the generator todetect the number of rotations of the motor%he input $oltage *the control $oltage+ to PICis changed by the fluctuation of the number of

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 2/32

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 3/32
)otor dri$e circuit%he P!)*Pulse !idth )odulation+ function ofPIC is used for the electric current control todri$e a motorP!) can change the duty of the pulse to output into CCP. by the data !hen thetime which is made the 6 le$el of the pulse ofCCP. is short" the time of ,7 *the L le$el+ becomes long in %18 %hat is" the dri$e electriccurrent of the motor increases ,ppositely" whenthe 6 le$el time of the pulse of CCP. is long"the ,7 time of %18 becomes short and the dri$eelectric current of the motor decreases
%he duty of the pulse of CCP. is controlled inthe $oltage *the control $oltage+ which wasta#en in with the control $oltage input circuit!hen the control $oltage is higher than theregulation $alue" the 6 le$el time of the CCP. pulse is made long and the number of rotations
of the motor is lowered !hen the control $oltage is lower than the regulation $alue" the 6 le$el time of the CCP. pulse is made short and the number of rotations of the motor is raisedI used 79channel ),: F&% for the dri$e of the motor %he P9channel ),: F&% can be used" too In the case" the

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 4/32
duty control of the CCP. pulse becomes opposite It becomes low9speed when the 6 le$el of the pulse is short andwhen long" it becomes high9speed %he way of connecting between the motor and the F&% becomes opposite In thiscase" the power of the transistor for the F&% dri$e should be connected with the source terminal of P9F&%
-ecause the output of the motor which was used this time is big" there is a gra$ity that the motor for the speeddetection brea#s %herefore" an electric current is suppressed by the resistor to ha$e put in series
For the details of ),: F&%" refer to '),: F&%'For the details of the CCP" refer to 'CCP feature of PIC.3F452'
Cloc# generator circuit
I am using .;9)6< resonator%here is not directly relation but it is related with the ta#ing9in period withcontrol $oltage" the period of the motor dri$ing pulse to the number ofrotations of the motor
L&D displaying circuit
L&Ds are made to light up to monitor the dri$e situation of the motor 2 bits ofhigher ran#s of the control data of P!) are used for the lighting9up of L&DsIn the condition that a motor isn/t dri$en" all L&Ds are turned off %he number of the lighting9up is increased in the order from L&D. as the dri$e electriccurrent increases !hen the motor is in the maximum dri$e condition" all L&Ds
become a lighting9up conditionAt the e=uipment this time" the L&D of the bar type with se$en L&Ds is used %hecircuit can control eight L&Ds 6owe$er" at the e=uipment this time" L&D.isn/t used and se$en L&Ds from L&D8 to L&D4 are used An L&D is lit up when1-x is 6 le$el

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 5/32
Power supply circuit
2 terminal regulator is used to get the operating $oltage for PIC
%he about 5;9mA electric current flows when se$en L&Ds are lit up at the sametime I used a . A9type regulator for the safety
Parts explanationfor DC motor speed controller
PIC.3F452
In the circuit this time" PIC.3F452 isusedAt the circuit this time" the control ofthe dri$e electric current of the motor isdone using the P!) function of theCCP %he $oltage according to thenumber of rotations of the motor ista#en in to the analog9to9digitalcon$erter and has the control of thedri$e electric current %his time" it isusing a motor for the speed detectionAlso" L&Ds for the monitor are lit up to#now the situation of the motor dri$e
Data sheet for PIC.3F452
2 terminal regulator * 54;> +
%his regulator is used to ma#e the stable power of ?> 0 &ight L&Ds forthe monitor sometimes light up at the same time*%his time" it is se$en+:o" when using a .;; mA9type regulator" little leeway occurs %his time"a .A type is used for the safety
Data sheet for 54;>

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 6/32
%ransistor for ),: F&% dri$e * 8:C.4.> +
%his transistor is used to dri$e ),: F&% by the output of PIC It is con$ertingthe output of PIC *;0 to >0+ into the $oltage to control an F&% *;0 to .80+
Data sheet for 8:C.4.>
Power ),: F&% * 8:@2.8 +
%his is 7 channel ),: F&%%he maximum drain current is 3;A!hen the F&% is in the ,7 condition" the resistance between drain andsource is milli9ohm :o" the electric power loss when the .;9A electriccurrent flows in the ,7 condition is ; !%he circuit this time doesn/t ha$e to use an F&% with such big capacity Itis because I don/t ha$e an F&% with appropriate capacity
Data sheet for 8:@2.8
Bener diode * 1D>A +
%he $oltage which is applied to the terminal of PIC is a maximum of ?>0%his diode pre$ents the destruction of PIC when the speed detection$oltage of the motor exceeds >0 !hen more than ?>0 $oltage be appliedne$er from outside" it is unnecessary

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 7/32
Diode bridge for speed detection $oltage polarity protection * !;8G +
I put the silicon diode bridge not to be in the problem e$en if it connectedthe pole of the motor for the speed detection oppositely !hen ne$erma#ing a mista#e in the connection" it is unnecessary
IC soc#et
PIC.3F452 is 84 pins of the slim type !hen you can not get a slim9type84 pin soc#et" two soc#ets of . pins can be used In the circuit this time" Iused two . pin soc#ets
1esonator
I used .;9)6< resonator!hen changing the fre=uency of resonator" the $alue with all #inds on thesoftware must be changed
0ariable resistor for motor speed setting
I used - typeAt the circuit this time" terminal numbers are used li#e the figure onthe leftIt becomes low9speed when turning to the left and it becomes high9speedwhen turning to the right%here is a circuit which is using oppositely in the position of the 7o.terminal and the position of the 7o2 terminal %he one is general

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 8/32
1esistor
It is to be ,@ at .(4 !
)ultilayer ceramic capacitor
%hese capacitors are used to bypass the high fre=uency noise of the inputand output of the power supply
Printed board
%his is an uni$ersal printed board with .> x 8> halls
Connector for L&Ds and $ariable resistor formotor speed setting
At first" I planned to use connectors to install L&Ds and a $ariable resistor for the motor speed setting atthe lid of the case 6owe$er" because it isn/t possible to house in the case" I decide to use wiringterminals
!iring terminal
%his terminal is used to connect a power supply wire and load

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 9/32
:tud
%his is used as the leg of the printed board
)ain motor %his is the motor which dri$es with thecircuit this time I use 1:924;P6 made by)A-C6I ),%,1 Inc in apan %he
specification of this motor is shown below
0oltage 1angeE .80 :peed at 7ormal LoadE ."8;;rpm
7ormal 0oltageE580 Current at 7ormal LoadE 8;A
7ormal LoadE .;;gcm :haft DiameterE 82;mm
:peed at 7o LoadE.3";;rpm
)otor for speed detectionAt the circuit this time" speed detection of the main motor is done with themotor for the detection I use 1&984; made by )A-C6I ),%,1 Inc inapan %he specification of this motor is shown below
0oltage 1angeE.>0 9 >0 :peed at 7ormal LoadE3"4>;rpm
7ormal 0oltageE2;0 Current at 7ormal LoadE 5>;mA
7ormal LoadE .55gcm :haft DiameterE 8;mm
:peed at 7o LoadE";;;rpm
!hen ma#ing turn at the speed which is the same as the main motor" it exceeds abo$e9mentionedspecification %he generated $oltage exceeds a specification but I thin# that there is no problem becausethe electric current flows hardly :trictly" there is a problem of the insulation because it becomes abo$ethe specification $oltage 6owe$er" I seem not to be in the hinderance because it is not high $oltage
)otor installing metal fittings%he motor is a cylinder and a screw for the motor fixation is put to thefront !hen installing a motor on the panel and so on" you can use these
holes %his time" I used the installing metal fittings of the type whichinserts a motor

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 10/32
Gear
%hese gears are used for the connection between the main motor and themotor for the speed detection %his time" because it is for the operationconfirmation of the speed control of the motor" the main motor is turningonly a motor for the speed detection
L&Ds for motor dri$e situation displaying * GL9.;5:.8 +%his is the L&D for the bar graph displaying which se$en L&Ds wereincorporated into %he control circuit can control eight L&Ds -ecause theindicator with eight L&Ds could not be gotten" I decided to use theindicator which had se$en L&Ds 6owe$er" when using as the le$el meter"the needed L&D is se$en
)otor connection terminal
%his is the terminal which connects a main motor and a speed detectionmotor
Power supply connector %his is the connector to connect a power

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 11/32
AC adapter
At first" I planned to share the power of the main motor 6owe$er" the
power of the motor separated from the control unit because it depended onthe #ind of the motor %his adapter is for the control unit
@nob for speed setting
%his is the #nob to turn a $ariable resistor for the speed control
Case
I used the case which is made from metal for ),:9F&% for the motordri$e In case of the motor which dri$es this time" the consumption electric power in ),:9F&% for the dri$e is little :o" I thin# that it is ,@ e$en if it puts or it doesn/t put a small heat sin# depending on the si<e of the dri$eelectric currentI used %C9 which is made by the %&I:6I7 electronics Inc in apan It ismade from aluminum with 5>mm width" >mm depth" 8;mm height
-ac# panel
I made a panel to display the name of the powerconnector and the motor connection terminal I

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 12/32
printed a panel to the ,6P sheet %hen" I put white paper behind the ,6P sheet for the character to beable to be well seen
7ame plate
I put a name plate as the ornament
Leg
%his is the leg to put to the case which was made of rubber %his leg is theattachment of the case
%erminal co$er
I put a terminal co$er to the drain terminal *center+ of the F&% It is to pre$ent from touch with the terminal next
Software Flow chart for DC motor speed
controller(1/2)

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 13/32
You can jump to the corresponding ow chart when ou clic! the part where the
pointer "ecome the hand#
:ource code file for DC motor speed controller
001
002003004005006007008009010
;********************************************************
;; DC motor speed controller;; Device : PIC16873; !"t#or : $eiic#i Ino"e;********************************************************
list p%pic16&873 incl"de p16&873'inc

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 14/32
011012013014015016017018019020021022023024025026027028029030
031032033034035036037038039040041042043
044045046047048049050051052053054055056057
058059060061062063064065066
((con&i) (#s(osc (+dt(o&& (p+rte(on (lvp(o&& errorlevel ,302 ;$"ppress -.n/ +.rnin)
;**************** .-el De&inition ********************speed e" d8 ;e&erence speed 58256%0'156c#.n)e e" d1 ;C#.n)e v.l"e 2mms
led e" #20 ;D control d.t. s.ve .re.
;**************** Pro)r.m $t.rt *********************** or) 0 ;eset ector )oto init or) 4 ;Interr"pt ector )oto int
;**************** Initi.l Process *********************init
;*** Port initi.li.tion -s& st.t"srp0 ;C#.n)e to <.n/1
movl+ -00000001 ;!=0 to inp"t mode mov+& tris. ;$et >I$! re)ister clr& tris- ;$et >I$< to "otp"t mode clr& trisc ;$et >I$C to o"tp"t mode -c& st.t"srp0 ;C#.n)e to <.n/0
;*** !D converter initi.li.tion movl+ -10000001 ;!DC$%10 C?$%!=0 !D@=%@= mov+& .dcon0 ;$et !DC@=0 re)ister -s& st.t"srp0 ;C#.n)e to <.n/1 movl+ -00001110 ;!DA%0 PCB%1110 mov+& .dcon1 ;$et !DC@=1 re)ister -c& st.t"srp0 ;C#.n)e to <.n/0
;*** PA initi.li.tion clr& tmr2 ;Cle.r >A2 re)ister movl+ -11111111 ;A. d"t lo+ speed mov+& ccpr1l ;$et CCP1 re)ister -s& st.t"srp0 ;C#.n)e to <.n/1 movl+ d255 ;Period%1638'4"sec610? mov+& pr2 ;$et P2 re)ister -c& st.t"srp0 ;C#.n)e to <.n/0 movl+ -00000110 ;Pst%1:1 >A2%@= Pre%1:16 mov+& t2con ;$et >2C@= re)ister movl+ -00001100 ;CCP1EF%0 CCP1A%1100PA mov+& ccp1con ;$et CCP1C@= re)ister
;*** Comp.re mode initi.li.tion clr& tmr1# ;Cle.r >A1? re)ister clr& tmr1l ;Cle.r >A1 re)ister movl+ #61 ;?61!8%25000 mov+& ccpr2# ;$et CCP2? re)ister movl+ #.8 ;25000*0'4"sec % 10msec mov+& ccpr2l ;$et CCP2 re)ister movl+ -00000001 ;Pre%1:1 >A1%Int >A1%@= mov+& t1con ;$et >1C@= re)ister

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 15/32
067068069070071072073074075076077078079080081082083084085086
087088089090091092093094095096097098099
100101102103104105106107108109110111112113
114115116117118119120121122
movl+ -00001011 ;CCP2A%1011Comp.re mov+& ccp2con ;$et CCP2C@= re)ister
;*** Interr"ption control -s& st.t"srp0 ;C#.n)e to <.n/1 movl+ -00000001 ;CCP2I%n.-le mov+& pie2 ;$et PI2 re)ister -c& st.t"srp0 ;C#.n)e to <.n/0 movl+ -11000000 ;BI%@= PI%@= mov+& intcon ;$et I=>C@= re)ister
+.it )oto G ;Interr"ption +.it
;*************** Interr"ption Process *****************int clr& pir2 ;Cle.r interr"ption &l.).d(c#ec/ -t&sc .dcon0)o ;!D convert end H )oto .d(c#ec/ ;=o' !).in
mov&+ .dres# ;e.d !D$? re)ister s"-l+ speed ;e& speed , Detect speed -t&sc st.t"sc ;e&erence Detect H )oto c#ec/1 ;=o' J"mp to K or % c#ec/
;,,, control to lo+ speed ,,, mov&+ ccpr1l ;e.d CCP1 re)ister .ddl+ c#.n)e ;C#.n)e v.l"e L CCP1 -t&ss st.t"sc ;@ver&lo+ H mov+& ccpr1l ;=o' rite CCP1 )oto led(cont ;J"mp to D control
c#ec/1
-t&sc st.t"s ;e&erence % Detect H )oto led(cont ;Fes' J"mp to D control
;,,, control to &.st speed ,,, movl+ c#.n)e ;$et c#.n)e v.l"e s"-+& ccpr1l& ;CCP1 , C#.n)e v.l"e -t&sc st.t"sc ;Mnder&lo+ H )oto led(cont ;J"mp to D control clr& ccpr1l ;$et &.stest speed
;**************** D control Process ******************led(cont com& ccpr1l+ ;Complement CCP1 -it mov+& led ;$.ve D d.t.
movl+ -00010000 ;$et comp.re d.t. s"-+& led+ ;D , d.t. -t&sc st.t"sc ;Mnder H )oto led1 ;=o'
movl+ -00000000 ;$et D control d.t. )oto int(end ;J"mp to interr"pt endled1 movl+ -00100000 ;$et comp.re d.t. s"-+& led+ ;D , d.t. -t&sc st.t"sc ;Mnder H

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 16/32
123124125126127128129130131132133134135136137138139140141142
143144145146147148149150151152153154155
156157158159160161162163164165166167168169
170171172173
)oto led2 ;=o'movl+ -00000001 ;$et D control d.t.
)oto int(end ;J"mp to interr"pt endled2 movl+ -01000000 ;$et comp.re d.t. s"-+& led+ ;D , d.t. -t&sc st.t"sc ;Mnder H )oto led3 ;=o'
movl+ -00000011 ;$et D control d.t. )oto int(end ;J"mp to interr"pt endled3 movl+ -01100000 ;$et comp.re d.t. s"-+& led+ ;D , d.t. -t&sc st.t"sc ;Mnder H )oto led4 ;=o'
movl+ -00000111 ;$et D control d.t. )oto int(end ;J"mp to interr"pt endled4 movl+ -10000000 ;$et comp.re d.t. s"-+& led+ ;D , d.t. -t&sc st.t"sc ;Mnder H )oto led5 ;=o'
movl+ -00001111 ;$et D control d.t.
)oto int(end ;J"mp to interr"pt endled5 movl+ -10100000 ;$et comp.re d.t. s"-+& led+ ;D , d.t. -t&sc st.t"sc ;Mnder H )oto led6 ;=o'
movl+ -00011111 ;$et D control d.t. )oto int(end ;J"mp to interr"pt endled6 movl+ -11000000 ;$et comp.re d.t. s"-+& led+ ;D , d.t. -t&sc st.t"sc ;Mnder H )oto led7 ;=o'
movl+ -00111111 ;$et D control d.t. )oto int(end ;J"mp to interr"pt end
led7 movl+ -11100000 ;$et comp.re d.t. s"-+& led+ ;D , d.t. -t&sc st.t"sc ;Mnder H )oto led8 ;=o'
movl+ -01111111 ;$et D control d.t. )oto int(end ;J"mp to interr"pt endled8 movl+ -11111111 ;$et D control d.t.
;************ =D o& Interr"ption Process **************int(end mov+& port- ;$et P@>< ret&ie
;********************************************************
; =D o& DC motor speed controller;********************************************************
end
Listing file for DC motor speed controller

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 17/32
AP!$A 02'50'02 Intermedi.te A@>@'!$A 11,24,2001 19:54:44 P!B1
@C @<JC> C@D I= $@MC >E> !M
00001;******************************************************** 00002 ; 00003 ; DC motor speed controller 00004 ; 00005 ; Device :PIC16873 00006 ; !"t#or : $eiic#iIno"e 00007;******************************************************** 00008
00009 I$> P%PIC16873
00010 I=CMD P16873'I=C 00001 I$> 00002 ; P16873'I=C $t.nd.rd ?e.der ile ersion 1'00 00358 I$>2007 372 00011 ((C@=IB (?$(@$C (D>(@ (P>(@= (P(@ 00012 @ ,302 ;$"ppress -.n/+.rnin) 00013
00014 ;**************** .-el De&inition******************** 00000008 00015 $PD NM D8 ;e&erence speed58256%0'156
00000001 00016 C?!=B NM D1 ;C#.n)e v.l"e 2mms 0001700000020 00018 D NM ?20 ;D control d.t. s.ve
.re. 00019
00020 ;**************** Pro)r.m $t.rt***********************0000 00021 @B 0 ;eset ector0000 2805 00022 B@>@ I=I>0004 00023 @B 4 ;Interr"pt ector0004 282D 00024 B@>@ I=> 00025
00026 ;**************** Initi.l Process*********************
0005 00027 I=I> 00028
00029 ;*** Port initi.li.tion0005 1683 00030 <$ $>!>M$P0 ;C#.n)e to <.n/10006 3001 00031 A@ <00000001 ;!=0 to inp"t mode0007 0085 00032 A@ >I$! ;$et >I$!re)ister0008 0186 00033 C >I$< ;$et >I$< to"otp"t mode

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 18/32
0009 0187 00034 C >I$C ;$et >I$C too"tp"t mode000! 1283 00035 <C $>!>M$P0 ;C#.n)e to <.n/0 00036
00037 ;*** !D converter initi.li.tion000< 3081 00038 A@ <10000001 ;!DC$%10 C?$%!=0!D@=%@=000C 009 00039 A@ !DC@=0 ;$et !DC@=0re)ister000D 1683 00040 <$ $>!>M$P0 ;C#.n)e to <.n/1000 300 00041 A@ <00001110 ;!DA%0 PCB%1110000 009 00042 A@ !DC@=1 ;$et !DC@=1re)ister0010 1283 00043 <C $>!>M$P0 ;C#.n)e to <.n/0 00044
00045 ;*** PA initi.li.tion0011 0191 00046 C >A2 ;Cle.r >A2re)ister0012 30 00047 A@ <11111111 ;A. d"t lo+speed
0013 0095 00048 A@ CCP1 ;$et CCP1re)ister0014 1683 00049 <$ $>!>M$P0 ;C#.n)e to <.n/10015 30 00050 A@ D255;Period%1638'4"sec610?AP!$A 02'50'02 Intermedi.te A@>@'!$A 11,24,2001 19:54:44 P!B2
@C @<JC> C@D I= $@MC >E> !M
0016 0092 00051 A@ P2 ;$et P2 re)ister
0017 1283 00052 <C $>!>M$P0 ;C#.n)e to <.n/00018 3006 00053 A@ <00000110 ;Pst%1:1 >A2%@=Pre%1:160019 0092 00054 A@ >2C@= ;$et >2C@=re)ister001! 300C 00055 A@ <00001100 ;CCP1EF%0CCP1A%1100PA001< 0097 00056 A@ CCP1C@= ;$et CCP1C@=re)ister 00057
00058 ;*** Comp.re mode initi.li.tion001C 018 00059 C >A1? ;Cle.r >A1?re)ister001D 018 00060 C >A1 ;Cle.r >A1
re)ister001 3061 00061 A@ ?61 ;?61!8%25000001 009C 00062 A@ CCP2? ;$et CCP2?re)ister0020 30!8 00063 A@ ?.8 ;25000*0'4"sec %10msec0021 009< 00064 A@ CCP2 ;$et CCP2re)ister0022 3001 00065 A@ <00000001 ;Pre%1:1 >A1%Int

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 19/32
>A1%@=0023 0090 00066 A@ >1C@= ;$et >1C@=re)ister0024 300< 00067 A@ <00001011;CCP2A%1011Comp.re0025 009D 00068 A@ CCP2C@= ;$et CCP2C@=re)ister 00069
00070 ;*** Interr"ption control0026 1683 00071 <$ $>!>M$P0 ;C#.n)e to <.n/10027 3001 00072 A@ <00000001 ;CCP2I%n.-le0028 008D 00073 A@ PI2 ;$et PI2 re)ister0029 1283 00074 <C $>!>M$P0 ;C#.n)e to <.n/0002! 30C0 00075 A@ <11000000 ;BI%@= PI%@=002< 008< 00076 A@ I=>C@= ;$et I=>C@=re)ister 00077002C 00078 !I>002C 282C 00079 B@>@ G ;Interr"ption +.it 00080
00081 ;*************** Interr"ption Process*****************002D 00082 I=>002D 018D 00083 C PI2 ;Cle.rinterr"ption &l.)002 00084 !D(C?CO002 191 00085 <>$C !DC@=0B@ ;!D convert end H002 282 00086 B@>@ !D(C?CO ;=o' !).in0030 081 00087 A@ !D$? ;e.d !D$?re)ister0031 3C08 00088 $M< $PD ;e& speed ,Detect speed0032 1803 00089 <>$C $>!>M$C ;e&erence
Detect H0033 2839 00090 B@>@ C?CO1 ;=o' J"mp to K or% c#ec/ 00091
00092 ;,,, control to lo+ speed ,,,0034 0815 00093 A@ CCP1 ;e.d CCP1re)ister0035 301 00094 !DD C?!=B ;C#.n)e v.l"e LCCP10036 1C03 00095 <>$$ $>!>M$C ;@ver&lo+ H0037 0095 00096 A@ CCP1 ;=o' rite CCP10038 2840 00097 B@>@ D(C@=> ;J"mp to Dcontrol 00098
0039 00099 C?CO10039 1903 00100 <>$C $>!>M$ ;e&erence %Detect H003! 2840 00101 B@>@ D(C@=> ;Fes' J"mp to Dcontrol 00102
00103 ;,,, control to &.st speed ,,,AP!$A 02'50'02 Intermedi.te A@>@'!$A 11,24,2001 19:54:44 P!B3

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 20/32
@C @<JC> C@D I= $@MC >E> !M
003< 3001 00104 A@ C?!=B ;$et c#.n)e v.l"e003C 0295 00105 $M< CCP1 ;CCP1 , C#.n)ev.l"e003D 1803 00106 <>$C $>!>M$C ;Mnder&lo+ H003 2840 00107 B@>@ D(C@=> ;J"mp to Dcontrol003 0195 00108 C CCP1 ;$et &.stest speed 00109
00110 ;**************** D control Process******************0040 00111 D(C@=>0040 0915 00112 C@A CCP1 ;Complement CCP1-it0041 00!0 00113 A@ D ;$.ve D d.t.0042 3010 00114 A@ <00010000 ;$et comp.re d.t.
0043 0220 00115 $M< D ;D , d.t.0044 1803 00116 <>$C $>!>M$C ;Mnder H0045 2848 00117 B@>@ D1 ;=o'0046 3000 00118 A@ <00000000 ;$et D controld.t.0047 2873 00119 B@>@ I=>(=D ;J"mp to interr"ptend0048 3020 00120 D1 A@ <00100000 ;$et comp.re d.t.0049 0220 00121 $M< D ;D , d.t.004! 1803 00122 <>$C $>!>M$C ;Mnder H004< 284 00123 B@>@ D2 ;=o'004C 3001 00124 A@ <00000001 ;$et D controld.t.
004D 2873 00125 B@>@ I=>(=D ;J"mp to interr"ptend004 3040 00126 D2 A@ <01000000 ;$et comp.re d.t.004 0220 00127 $M< D ;D , d.t.0050 1803 00128 <>$C $>!>M$C ;Mnder H0051 2854 00129 B@>@ D3 ;=o'0052 3003 00130 A@ <00000011 ;$et D controld.t.0053 2873 00131 B@>@ I=>(=D ;J"mp to interr"ptend0054 3060 00132 D3 A@ <01100000 ;$et comp.re d.t.0055 0220 00133 $M< D ;D , d.t.0056 1803 00134 <>$C $>!>M$C ;Mnder H0057 285! 00135 B@>@ D4 ;=o'
0058 3007 00136 A@ <00000111 ;$et D controld.t.0059 2873 00137 B@>@ I=>(=D ;J"mp to interr"ptend005! 3080 00138 D4 A@ <10000000 ;$et comp.re d.t.005< 0220 00139 $M< D ;D , d.t.005C 1803 00140 <>$C $>!>M$C ;Mnder H005D 2860 00141 B@>@ D5 ;=o'005 300 00142 A@ <00001111 ;$et D control

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 21/32
d.t.005 2873 00143 B@>@ I=>(=D ;J"mp to interr"ptend0060 30!0 00144 D5 A@ <10100000 ;$et comp.re d.t.0061 0220 00145 $M< D ;D , d.t.0062 1803 00146 <>$C $>!>M$C ;Mnder H0063 2866 00147 B@>@ D6 ;=o'0064 301 00148 A@ <00011111 ;$et D controld.t.0065 2873 00149 B@>@ I=>(=D ;J"mp to interr"ptend0066 30C0 00150 D6 A@ <11000000 ;$et comp.re d.t.0067 0220 00151 $M< D ;D , d.t.0068 1803 00152 <>$C $>!>M$C ;Mnder H0069 286C 00153 B@>@ D7 ;=o'006! 303 00154 A@ <00111111 ;$et D controld.t.006< 2873 00155 B@>@ I=>(=D ;J"mp to interr"ptend006C 300 00156 D7 A@ <11100000 ;$et comp.re d.t.
AP!$A 02'50'02 Intermedi.te A@>@'!$A 11,24,2001 19:54:44 P!B4
@C @<JC> C@D I= $@MC >E> !M
006D 0220 00157 $M< D ;D , d.t.006 1803 00158 <>$C $>!>M$C ;Mnder H006 2872 00159 B@>@ D8 ;=o'0070 307 00160 A@ <01111111 ;$et D controld.t.0071 2873 00161 B@>@ I=>(=D ;J"mp to interr"pt
end0072 30 00162 D8 A@ <11111111 ;$et D controld.t. 00163
00164 ;************ =D o& Interr"ption Process**************0073 00165 I=>(=D0073 0086 00166 A@ P@>< ;$et P@><0074 0009 00167 >I 00168
00169;******************************************************** 00170 ; =D o& DC motor speed controller 00171
;******************************************************** 00172
00173 =DAP!$A 02'50'02 Intermedi.te A@>@'!$A 11,24,2001 19:54:44 P!B5
>#e l.-el list #.s -een deleted'
AA@F M$!B A!P E % Msed , % Mn"sed

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 22/32
0000 : E,,,EEEEEEEEEEEE EEEEEEEEEEEEEEEE EEEEEEEEEEEEEEEE EEEEEEEEEEEEEEEE0040 : EEEEEEEEEEEEEEEE EEEEEEEEEEEEEEEE EEEEEEEEEEEEEEEE EEEEE,,,,,,,,,,,2000 : ,,,,,,,E,,,,,,,, ,,,,,,,,,,,,,,,, ,,,,,,,,,,,,,,,, ,,,,,,,,,,,,,,,,
!ll ot#er memor -loc/s "n"sed'
Pro)r.m Aemor ords Msed: 114Pro)r.m Aemor ords ree: 3982
rrors : 0.rnin)s : 0 reported 0 s"ppressedAess.)es : 0 reported 6 s"ppressed
Processing explanationfor DC motor speed controller
LI:% and I7CLD& directi$e list p%pic16&873 incl"de p16&873'inc
Processor type is set by LI:% directi$e%he standard label definition of PIC.3F452 is read by the I7CLD& directi$e
Configuration !ordConfiguration !ord is specified using C,7FIG directi$e
((con&i) (#s(osc (+dt(o&& (p+rte(on (cp(o&&
Configuration !ord can be set when writing a program by the programmer 6owe$er" it isautomatically established when using C,7FIG directi$e%he following specification is done as configuration word
,scillator E 6:
!atchdog %imer E ,FF
Power9up %imer E enabled
Low 0oltage IC:P E ,FF*1-2 can not be used for the input(output port when not ma#ing this,FF+
%he result is 2F58h%he item except the abo$e is included in Configuration !ord of PIC.3F452 Generally" it is to
be ,@ in abo$e9mentioned directine
:uppressing of the ban# warning errorlevel ,302 ;$"ppress -.n/ +.rnin)
In PIC.3F452" :F1 is di$ided into four ban#s %here are :F1s which are common to all ban#s" but there are :F1s which are peculiar to the ban# %he specification of the ban# is done with1P; bit and 1P. bit of the :%A%: register &$en if the specification of the ban# to the:%A%: register is normally done" the message to confirm ban# specification is displayed

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 23/32
&xAess.)eQ302R C:SAP!<SP@JC>SA@>@(T2SA@>@'!$A 32 : e)ister inoper.nd not in -.n/ 0' ns"re t#.t-.n/ -its .re correct'
Abo$e9mentioned example is a warning message about the %1I:A register *ban# .+ which isspecified at the line of 28nd of the source code%he content with the 28nd line is hereinafter
032 mov+& tris. ;$et >I$! re)ister
-an# specification is normally set at the 2;th line In the case" this message is displayed %hismessage is displayed e$en if a ban# is specified at the 2.th line It is none of your business'errorle$el' is used to suppress the displaying of message *2;8+ %here is a way of changing ban# specification with p.3f452inc" too
Label definition;**************** .-el De&inition ********************
In the processing this time" three labels are defined
'speed' is a reference speed $alue It is controlled for the $alue which changed the $oltagewhich occurred with the control $oltage input circuit by the A(D and the $alue which wasspecified by speed to become e=ual %he $alue which multiplied the $alue which was specified by 'speed' on the $alue which di$ided >0 in 8>3 is reference speed $oltage -ecause 4 isspecified this time" >H4(8>3;.>30 is reference speed $oltage !hen ma#ing the $alue whichis specified by 'speed' big" the reference speed $oltage becomes high It should change the$alue of 'speed' in the output $oltage of the circuit which detects the number of rotations of themotor'change' is the $alue which specifies the speed to change the control electric current of themotor to %he detection of the rotational speed of the motor is done e$ery .; milliseconds!hen there is a difference in the $oltage of the control $oltage input circuit and the referencespeed $oltage" the $alue which was specified by 'change' is added or subtracted to or from the$alue of the P!) duty %he duty specification for P!) is done by the CCP1. register 8>3
#inds of duties can be set by CCP1. because it is 4 bits !hen the motor dri$e electric currentstops when the $alue of CCP1. is 8>> and the $alue is ;" it is dri$en in the maximum electriccurrent !hen . is set to 'change'" . is added to or subtracted from the $alue of CCP1. e$ery.; milliseconds For example" in the time which the maximum dri$e condition*CCP1.;+ ta#esfrom the stop condition*CCP1.8>>+" it is .;ms x 8>38>3 seconds -ecause it is 8>3seconds in the time which the >0 change ta#es" as for . $alue" it is possible to assume that the$alue of change is about 8m0(ms %he $ariation with the control $alue of .; milliseconds becomes big when ma#ing the $alue of 'change' big !ith the characteristic of the motor to use" this$alue should be adjusted'led' is the wor# area which is sa$ed the duty $alue temporarily to ma#e L&Ds for the controlsituation monitor light up Address 8;h is used
Program start;**************** Pro)r.m $t.rt ***********************
Instruction is executed from Bero addresses of the program memory when ma#ing the power,7 of the PIC !hen there is interruption processing" processing is begun from the addresse It ma#es each processing jump with the G,%, instruction

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 24/32
Initiali<ation process
;**************** Initi.l Process *********************
%he following processing is done as the initiali<ation processing after the turning on
Initialization of the mode of ports A , B and C
I use the ;th of port A for an analog input All other A ports are set to output mode toa$oid the influence from other input port %here may are not an influenceAll - ports are set to output mode for L&D controlAll C ports are set to output mode for CCP
Initialization of the A/D converter
-ecause .; )6< are used as the cloc# of PIC" A(D con$ersion cloc# is set to Fosc(28%he input channel is set to A7; and A(D con$erter ,7 bit is set%he con$ersion result is set to left justification to use a higher byteAs for the input port configuration control" the pattern of ',nly ;th port is analog' isselected
Initialization of PWMCCP. is used as the P!) mode%he counter of timer8 is cleared and duty is set because of the certain operation%he period of the output pulse is .324 microseconds *about 3.; 6<+%he setting $alue of prescaler is .E.3 %imer8 ,7 bit is set
Initialization of the compare mode
CCP8 is used as the compare mode and ma#es interruption occur periodically%he interruption period is .; milliseconds I set the internal cloc# as the count source oftimer.%he prescaler of timer. is set to .E. and is set timer. to operate%he CCP8 mode is selected to start an A(D con$erter at the same time when interruption
occurs
Initialization of interrption
%he interruption enable bit of CCP8 is set Also GI& and PI& are set
%he initiali<ation processing ended abo$e After this" it waits for the interruption only As themain processing" it repeats the execution of the same address /J/ with operand means itsaddress /J?./ means an next address from its address
Interruption process
;*************** Interr"ption Process *****************
Clearin! of interrption fla!
%he interruption occurs e$ery .; milliseconds with CCP8 %he interruption flag of CCP8should be cleared first !hen not clearing this" the following interruption occurs withoutwaiting desired time

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 25/32
Wait ntil A/D converter completion
%he con$ersion of the A(D con$erter has started simultaneously with interruption ofCCP8 :o" it waits until change completion*%he G, bit of ADC,7; becomes /;/+ %histime" because the analog channel is only ; channel" it is not need to wait until the input
ta#ing9in *the about 8; microseconds+ !hen A(D con$erting while switching more thanone channel" after channel selecting" the waiting time should be pro$ided before start theA(D con$ersion
Comparison with reference speed volta!e
If the A(D con$ersion completes" the higher ran# byte of the con$erted result is comparedwith the reference speed $alue A con$erted $alue is composed of .; bits 6owe$er" at thecircuit this time" because it doesn/t need .;8 pieces of di$ision :o" only the higher ran# byte is used and ma#es 8>3 pieces of di$isionAn A(D con$ersion $alue and reference speed $alue *speed+ are compared and adifference between the number of rotations and the reference speed of the motor is judged
Speed down process
!hen the turning of the motor is higher than the reference speed" a duty ratio is made bigand a motor dri$e electric current is suppressed %he rate that the duty ratio becomes big isdecided by 'change'
Speed p process
!hen the turning of the motor is lower than the reference speed" a duty ratio is madesmall and a motor dri$e electric current is increased %he rate that the duty ratio becomessmall is decided by 'change'
"#D li!htin!$p control
An L&D le$el meter is used to confirm the dri$e situation of the motor :e$en L&Ds arehoused in the L&D le$el meter which is used this time I thought that eight L&Ds wereneeded 6owe$er" I made this processing and #new that it was enough in se$en L&Ds Inthe logic this time" 2 bits of higher ran#s of CCP1. are used to control a le$el meter%here are eight #inds of condition which it is possible to express by 2 bits from ;;; to... :o" I thought that I needed eight L&Ds !hen ma#ing one L&D light up e$ery code"eight L&Ds are needed 6owe$er" in case of the le$el meter" the number of the L&Dswhich are lit up as the le$el rises is increased Also" ;;; becomes all L&D going9outconditions :o" the L&D is enough at se$en
In case of dri$e stop" it ma#es the bit of CCP1. ;;;;;;;; and in case of the maximumdri$e" it ma#es it ........ :o" to use this information for the le$el meter control" ; and .should be re$ersed %he 'comf' instruction is for its purpose ,nly 2 bits of higher ran#sof the re$ersed data of CCP1. are used for the lighting9up of a le$el meter %he lighting9up of the L&Ds are controlled according to the code %he circuit prepared 4 ports to 1-5from 1-; %he th bit from the higher ran# of CCP1. is used for the control of 1-; Atthe circuit this time" the control of 1-; is unnecessary

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 26/32
Interruption ending process
;************ =D o& Interr"ption Process **************
%he 1&%FI& instruction is executed at end of the interruption processing !ith this" it becomesthe interruption possible condition -ecause it isn/t sa$ing registers in case of interruption" thereis no need to resa$e%he control of the - port is done before executing 1&%FI& instruction %his is to reduce the processing step of the P,1%- register
&nd of coding
;********************************************************
; =D o& si)n-o.rd control processin);********************************************************
end
At the end of coding" &7D directi$e is used
Assembly for DC motor speed controller
Installation of L&D bar An L&D bar is mounted on the lid of the case First" it ma#es a rectangular hole to mount thedisplaying part of the L&D on the case %he case which I used is made from aluminum%herefore" I adjust the si<e of the hole using the jigsaw and the files An L&D bar is protectedwith the transparent acrylic panel with the thic#ness of ;> mm :crews are used for the fixationof the acrylic panel and the L&D bar

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 27/32
,pen the holes
%he holes are made which install a motor connection terminal" a$ariable resistor for the motor speed setting and a power suupplyconnector on the side of the case Also" the holes are openedwhich installs control unit and an F&% at the bottom %hese holesare made while the si<e of the parts are measured%he confirmation is needed that the $ariable resistor and the power suupply connector don/t touch to the control unit
Installation and wiring for motor connection terminal and F&%
%he bac# panel is installed with the motor connectionterminal -ecause the place of the wiring is narrow" wiringto a terminal and an F&% is done before installing ofcontrol unit A terminal co$er is put to the central terminal *thedrain+ of the F&% It is to pre$ent from touch among theterminals

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 28/32
Installation and wiring for $ariable resistor and power suupply connector
%he bac# panel is installed with these parts I remo$ed the stopper of the $ariable resistor used the needle plier A #nob is installed soas not touch with the screw part of the $ariable resistor !hen theaxis of $ariable resistor is long" it ma#es short-ecause the wiring part of these parts is narrow too" wiring to theterminals are done before installing control unit
Installation and wiring for control unit
Control unit is installed after all wiring is ended to the parts whichwere installed on the side of the case !iring is done in the orderfrom the difficult place I wired from the grounding wire and the power supply wire It is because those wires are thic# 7ext" F&%gate wire 0ariable resistor wire Control $oltage wire%he F&% has the possibility to generate heat %herefore" need anattention to wire doesn/t touch with the F&%
Installation of name plate
I installed a name plate on the lidAn attention is needed so as not for the installing screw to dotouch with the control unit
!iring for L&D bar
!iring with the L&D bar to ha$e put to the lid is done -ecausethere are many numbers of the wires" it pays attention so as not toma#e a mista#e I wired in order of 4 5 3 > 2 8GL As for the length of the wiring" it considers a situation which

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 29/32
opened a lid %o pre$ent the touch of the wiring with the F&% when closing a lid" wiring is put under thecontrol unit
Installation of rubber legs%he e=uipment is complete when installing rubber legs at the bottom
Adjustment for DC motor speed controller
)otor assembly for adjustment
1:924;P6 is used for the main motorand 1&984; is used for speed detection-oth motors are made by the)A-C6I ),%,1 Inc in apan-ecause this assembly is to adjust aspeed control" both motors are directlyconnected using the plastic gear !hen
the center of both motors isn/t right"there is possibility that the gear comesoff the shaft of the motor Pay attention
:peed control parameter

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 30/32
%he speed control flow of the circuit this time isshown with the left figureAt the control circuit" the following three parametersshould be adjusted
:peed reference $alue
Control rate $alue *Deceleration and
Acceleration+Control period
%hese $alues will be changed with the characteristicof the main motor and the speed detection motor Incase of the motor" e$en if the dri$e electric currentchanges" the rotational speed doesn/t shiftimmediately It ta#es time In case of the smallmotor" because the mass of the rotor is small" therotating speed shifts =uic#ly by the change of thedri$e electric current In case of the big motor" itta#es time to change the rotating speed after
changing the dri$e electric current %he rotating change time can be made short if the change of the dri$eelectric current ma#es big 6owe$er" when the change of the dri$e electric current is too big" the rotatingspeed can not be made constant
:peed reference $alue is adjusted at the $alue to set to speedControl rate $alue is adjusted at the $alue to set to changeControl period is adjusted at the $alue to set to CCP186 and CCP8L registers
!hen ma#ing a program" I thought that the speed detection period didn/t influence a controlcharacteristic %herefore" I didn/t ma#e a period $alue label
!hen the control rate $alue is big!hen the detection period is short and the control rate $alueis big" the rotating speed of the motor changes big !hen therotating speed of the motor is abo$e the reference $alue" adeceleration control is done*It reduces an dri$e electriccurrent+ 6owe$er" because of the mass of the rotor of themotor" it doesn/t react immediately &$en if it beginsdeceleration by the A point" the rotating speed of the motorcontinues to rise in a little while In case of the - point isabo$e the reference $alue" a deceleration control are donemoreo$er In case the speed is abo$e the reference $alue" thedri$e electric current is increased in e$ery period %hedeceleration $alue at - pont is bigger than A point%herefore" it continues to decelerate e$en if it falls below the
reference $alue !hen detecting rotating speed below thereference $alue in the C point" acceleration is begun It is more strongly accelerated e$ery period li#e thedecelerationIt repeats abo$e mentioned operation and the rotating speed of the motor changes widely%he speed detection period is short" the turning change appears conspicuously

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 31/32
!hen the control rate $alue is small
!hen the control rate $alue is small" a comparati$ely stablespeed control is done 6owe$er" the stability to the loadchange becomes wea# It ta#es time until it returns to the
reference $alue after the rotating speed declines by the load
Influence with speed detection period
Kou may seem to be able to do a tender control if you ma#e a speed detection period short 6owe$er" it doesn/t meet -ut" this relation is in caseof my control circuit In case of the other control system" it doesn/t applyIn case of my control circuit" it increases a deceleration $alue or an acceleration $alue e$ery period &$enif a control electric current is changed" the rotating speed doesn/t sometimes change immediately %his is because of the mass of the rotor !hen the speed detection period is short" the motor dri$e electriccurrent changes widely As a result" the change of the rotating speed becomes big
!hen the detection period is long" the band of the dri$e electric current becomes small As a result" thechange of the rotating speed becomes small!hen the detection period is long" the controllability to the load change declines 6owe$er the badinfluence comes out when too long

8/12/2019 Dc Speed Explain
http://slidepdf.com/reader/full/dc-speed-explain 32/32
%urns on order of the power A power is turned on after connecting a motor and a control system It turns on the motor first and afterthat" it turns on the controller !hen the power of the motor and the control circuit is the same" it isn/tmade %he reason for turning on the power in the order is hereinafter !hen turning on the controllerfirst" because $oltage isn/t applied to the speed detector" the control circuit increases a dri$e electriccurrent and becomes a maximum dri$e electric current condition finally !hen turning on the power ofthe motor in this condition" a motor is dri$en in the maximum electric current As a result" the motor becomes reference speed gradually after beginning to turn forcefully !hen this operation is not a problem" you don/t ha$e to be conscious of the turning on order
Adjustment of the control parameter
Kou consider the abo$e and adjust the control parameter It is troublesome a littleAd%stment of speed detection period
!hen this $alue isn/t appropriate" the rotating speed of the motor isn/t stable In thecase" it attempts to ma#e a period longIt adjusts by the $alue of CCP186 and the CCP8L registers
Ad%stment of reference vale
It sets a $ariable resistor on the low9speed side*Left fullness+ and it adjusts the low9speed $alue of the motorIt adjusts by the $alue of speed
%o change the speed range to adjust with the $ariable resistor" the $alue of 1.8 should be changed
Ad%stment of control rate vale
!hen ma#ing this $alue big" the change of the dri$e electric current $alue at each period becomes big !hen the load changes big" it ma#es this $alue big I set to theminimum $alueIt adjusts by the $alue of change
Please try $ariously because these $alues change with the motor and the detector to use