Embed Size (px)
Citation preview

IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 60, NO. 7, JULY 2012 3755
Decentralized Resource Assignment in CognitiveNetworks Based on Swarming Mechanisms Over
Random GraphsPaolo Di Lorenzo, Student Member, IEEE, Sergio Barbarossa, Fellow, IEEE, and Ali H. Sayed, Fellow, IEEE
Abstract—This paper proposes a distributed resource assign-ment strategy for cognitive networks mimicking a swarm foragingmechanism, assuming that the communication among the cogni-tive nodes is impaired by random link failures and quantizationnoise. Using results from stochastic approximation theory, wepropose a swarm mechanism that converges almost surely to afinal allocation even in the presence of imperfect communicationscenarios. The theoretical findings are corroborated by numericalresults showing that the only effect of the random link failuresis to decrease the convergence rate of the algorithm. We proposethen a fast swarming approach, robust to random disturbances,that adapts its behavior with respect to the interference powerperceived by every node, thus increasing the speed of convergenceand improving the resource allocation capabilities.
Index Terms—Cognitive radio, dynamic radio access, quantiza-tion noise, random link failures, social foraging swarms, stochasticapproximation.
I. INTRODUCTION
D YNAMIC radio access techniques help improve the effi-ciency of conventional spectrum access protocols [1]. The
basic idea in cognitive networks is to establish a hierarchicalstructure where unlicensed users, also known as secondary users(SU’s), are allowed to use temporally unoccupied communica-tion resources, such as frequency bands, time slots or user codes,under the constraint of not interfering (or only producing tol-erable interference) with licensed (also called primary) users(PU’s). The opportunistic users should be able to sense the re-source domain, either time slots or frequency subchannels, usethe unoccupied slots and release them as soon as primary usersdemand access. Besides cognitive radios, another interesting
Manuscript received July 25, 2011; revised December 29, 2011; acceptedFebruary 25, 2012. Date of publication April 03, 2012; date of current versionJune 12, 2012. The associate editor coordinating the review of this manuscriptand approving it for publication was Prof. Huaiyu Dai. This work was supportedby FREEDOM Project, Nr. ICT-248891. The work of A. H. Sayed was sup-ported in part by NSF grants CCF-1011918 and CCF-0942936. Part of this workwas presented at the 2011 IEEE International Conference on Acoustic, Speechand Signal Processing, Prague, May 2011 and at the 17th International Confer-ence on Digital Signal Processing, Corfu, July 2011.P. Di Lorenzo and S. Barbarossa are with the DIET, Sapienza University of
Rome, 00184 Rome, Italy (e-mail: [email protected]; [email protected]).A. H. Sayed is with the Electrical Engineering Department, University of
California, Los Angeles, CA 90095 USA (e-mail: [email protected]).EDICS: SEN-DISTColor versions of one or more of the figures in this paper are available online
at http://ieeexplore.ieee.org.Digital Object Identifier 10.1109/TSP.2012.2192434
area of application of dynamic radio access techniques is femto-cell networks, where the potential massive deployment of user-operated femto-access points demands clever decentralized re-source assignment mechanisms. Interference management is acritical issue in femtocell networks and it becomes critical todevise mechanisms that are able to assign radio resources, e.g.,time and frequency slots, to femto-users, possibly without thesupervision of a centralized controller. Doing so would helplimit the interference from femto to macro users as well as fromfemto to femto users.A relatively recent approach to designing communication
networks endowed with self-organizing and self-healing char-acteristics takes inspiration from biological models, which areinherently robust systems, capable of solving difficult organ-ization tasks by exploiting the cooperation among individualnodes, without the need for a central processor unit. In thebioinspired approach, the network nodes are modeled as apopulation of simple agents interacting with the surroundingenvironment. While each individual has relatively little intel-ligence, it is the collaborative behavior of the population thatleads to a global intelligence pattern capable of handling com-plex tasks. Bioinspired models for network synchronizationand resource allocation over cognitive networks have beenstudied in a series of works, see, e.g., [2]–[10]. A usefulsurvey article is [2], while [3] focuses on the practical rel-evance of bioinspired solutions. Reference [4] shows how asimple self-synchronization mechanism can provide the basictool for implementing distributed maximum likelihood estima-tors in a wireless sensor network. In [5], the authors developeda decentralized scheduling scheme over a network of self-or-ganizing devices that are modeled as pulse-coupled oscillators.Reference [7] describes three applications of bioinspired tech-niques for resource allocation over cognitive radio networks:detection of spectrum holes; resource allocation in orthogonalfrequency division multiple access systems; and distributedresource auctioning. Reference [8] also proposes a biolog-ically inspired consensus-based spectrum sensing technique.Furthermore, [9] and [10] model the dynamic spectrum accessproblem as an adaptive assignment task in an insect colony.There has also been recent work showing how learning andcooperation over adaptive networks can be used to modelcollective animal behavior and self-organization in biologicalnetworks such as flocking birds [13], schooling fish in searchfor food [14], and bacteria motility [15], [16]. Adaptive diffu-sion approaches of the form [11], [12] allow swarms to exhibitcohesive motion while at the same time solving an estimation
1053-587X/$31.00 © 2012 IEEE

3756 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 60, NO. 7, JULY 2012
or tracking task of interest through adaptation and learning inthe presence of noise and disturbances. Several swarm modelshave been analyzed in the control literature as well, see, e.g.,[17]–[23]. The goal of the latter works [17]–[23] has beenmainly to study the stability and cohesiveness of the swarm.Other works [27]–[31] studied the case where the graph de-scribing the interaction among the swarm individuals varieswith time, thus inducing a switching topology. In [28], theauthors showed that, if the network graph is always con-nected, a stable flocking motion can be achieved by usinga set of switching control laws given by a combination ofattractive/repulsive and alignment forces. Reference [29] con-sidered a swarm model affected by a switching topology andproved the convergence of the swarm to a common velocityvector and the stabilization of interagent distances, regardlessof switching, as long as the network remains connected all thetime. The cohesiveness of a hybrid swarm model, suitable todescribe swarm aggregation with limited sensing ability, wasalso analyzed in [30] taking into account switching topologies.The flocking behavior of multiagent systems with switchingtopology in a noisy environments was considered in [31],where it was shown that, although the information is contam-inated by noise, all agents can form and maintain the flockingbehavior if the gradient of the environment is bounded and theinteraction graph is jointly connected.Motivated by the models in [20], [21], [24], [25] proposed
a distributed mechanism to assign resources to the secondarynodes (or femto-access points), inspired by a swarm mecha-nism mimicking the search for food of a flock of birds. Thespatial distribution of food played the role of the inverse ofthe interference, so that regions with small interference cor-respond to areas with more food and vice-versa. The roleplayed by the swarming mechanism in the resource allocationproblem was to induce collaborative sensing among the nodes(the motion of every bird depends on what the whole swarmis sensing), while preventing different nodes from picking upthe same resource (i.e., preventing collision among birds) andyet avoiding an excessive spread in the resource domain, ei-ther time duration or bandwidth (keeping the swarm cohesive).The mechanism proposed in [24], [25] assumed ideal commu-nications among the cognitive nodes. However, in a realisticscenario, the signaling channel devoted to the exchange of in-formation among the cognitive nodes is affected by randomfading, delay and additive noise. In delay-sensitive applica-tions, like voice or video streaming, the coordination amongthe nodes needs to be established within a maximum delay. Toenforce such a constraint, one may simply discard signalingpackets that are not received correctly within the maximumdelay. This situation can be modeled by introducing a randomgraph describing the interaction among the cognitive nodes,where a link between two nodes is on randomly, with a prob-ability given by the likelihood that a packet is received withno errors within the maximum delay. Moreover, since thedata exchanged among the cognitive nodes must be quantizedwith a finite number of bits, the effect of quantization noiseon the swarm mechanism should be also taken into account.The goal of this work is to extend the swarm-based resourceassignment mechanism proposed in [24], [25] to the more re-
alistic case where the packets exchanged among the cognitivenodes, while running the distributed assignment mechanism,are randomly dropped and the transmitted data are encodedwith a finite number of bits.The effect of random graphs on consensus algorithms has
been thoroughly studied in a series of works, such as [33]–[37],which focused on the convergence of consensus protocols inthe presence of random disturbances. In [33], the authors usea decreasing sequence of weights to prove the convergence ofconsensus protocols to an agreement space in the presence ofadditive noise under a fixed network topology. A distributedconsensus algorithm in which the nodes utilize probabilisticallyquantized information to communicate with each other was pro-posed in [34]. As a result, the expected value of the consensusis equal to the average of the original sensor data. A stochasticapproximation approach was followed in [35], which consid-ered a stochastic consensus problem in a strongly connected di-rected graph where each agent has noisy measurements of itsneighboring states. The study of a consensus protocol that is af-fected by both additive channel noise and a random topologywas considered in [37]. The resulting algorithm relates to con-trolledMarkov processes and the convergence analysis relies onstochastic approximation techniques.In this paper, inspired by these recent results, we propose a de-
centralized algorithm to solve the resource assignment problemin the presence or random disturbances (such as fading, noise,and quantization) and we prove its convergence in the presenceof random link failures and quantization noise. The basic con-tributions of this paper are the following: 1) the extension ofthe swarming algorithm of [24] to the case of inter-nodes com-munication affected by random disturbances; 2) the derivationof the convergence properties of the proposed algorithm in thepresence of random disturbances such as link failures, quanti-zation noise and estimation errors; 3) the introduction of a fastswarming algorithm, with improved adaptation and learning ca-pabilities, and 4) the application of such a procedure to the dy-namic resource allocation problem.The paper is organized as follows. In Section II we briefly
recall some basic concepts from algebraic graph theory, randomlink failures model and dithered quantization that will be usedthroughout the paper. Section III describes the swarm modeland formulates the search of available time/frequency slots asthe distributed minimization of a global potential function. InSection IV, we derive the convergence properties of the pro-posed algorithm in the presence of random disturbances suchas link failures, quantization noise and estimation errors. InSection V, mimicking the behavior that leads natural swarms toimprove their food search capabilities and to increase their ro-bustness against predators’ attacks, we propose a fast swarmingmethod based on a proper selection of the descent direction ofa scaled gradient optimization. The proposed algorithm adaptsthe speed of the swarm according to the perceived interferencedistribution resulting in improved allocation performance,convergence speed and adaptation capability. In Section VI,we provide simulation examples corroborating the theoreticalresults and showing the effect of the radio channel impairmentson the performance of the proposed algorithms. Finally, inSection VII we draw some conclusions.

DI LORENZO et al.: DECENTRALIZED RESOURCE ASSIGNMENT IN COGNITIVE NETWORKS 3757
II. BACKGROUND
In this section, we briefly recall some basic concepts to beused throughout the paper.
A. Algebraic Graph Theory
The interaction among the individuals (agents) of a swarmis modeled as an undirected graphs , where
denotes the set of nodes and is the edgeset. The structure of the graph is described by a symmetricadjacency matrix , whose entries are either
positive or zero, depending on wether there is a link betweennodes and or not. The set of neighbors of a node is ,defined as
(1)
Node communicates with node if is a neighbor of (or). Denoting by the degree of node , the
degree matrix is a diagonal matrix with entries that are therow sums of the adjacency matrix . The graph Laplacian isdefined as . We denote by , , theeigenvalues of , ordered in increasing sense. The ma-trix always has, by construction, a null eigenvalue ,with associated eigenvector composed of all ones.Properties: Let be an undirected graph of orderwith a symmetric nonnegative adjacency matrix .
Then, the following statements hold [40]:1) is a positive semidefinite matrix that satisfies the fol-lowing sum-of-squares (SOS) property
(2)
2) The graph has connected components iff. In particular, is connected iff ;
3) Let be a connected graph, then for any such that, we have
(3)
For a connected graph, the nullspace of has dimension 1 andit is spanned by the vector . Hence, any vector liesin a subspace orthogonal to the nullspace of . The quantity
is known as the algebraic connectivity of the graph andis a measure of the convergence speed of consensus algorithms[40]. A graph is balanced if for all
. In a balanced graph, the total weight of edges entering anode and leaving the same node are equal for all nodes. Themostimportant property of balanced graphs is that the unit vectoris also a left eigenvector of their Laplacian (or ). Wefurther consider -dimensional graph Laplacians defined by
(4)
where denotes the Kronecker product. This multidimensionalLaplacian satisfies the following SOS property:
(5)
where and . Furthermore, thespectrum of the multidimensional Laplacian matrix is such that
(6)
where is the vectorcontaining the eigenvalues of the Laplacian matrix . Fora connected graph, a vector , satisfying ,
, where is the vector of the canonical basis, withall entries equal to zero, except the th component equal to one,belongs to an -dimensional subspace (the disagree-ment eigenspace of ) that is orthogonal to the nullspace of .
B. Random Link Failures
In a realistic communication scenario, the packets exchangedamong cognitive nodes may be received with errors, becauseof channel fading or noise. The retransmission of erroneouspackets can be incorporated into the system, but packet retrans-mission introduces a nontrivial additional complexity in decen-tralized implementations and, more importantly, it also intro-duces an unknown delay and delay jitter. It is then of interest toexamine simple protocols where erroneous packets are simplydropped.We take into account random packet dropping bymod-eling the coefficient describing the network topology as sta-tistically independent random variables. Then, the Laplacianof the graph varies with time as a sequence of i.i.d. matrices
, which can be written, without any loss of generality, as
(7)
where denotes the mean matrix and are i.i.d. perturba-tions around the mean. We do not make any assumptions aboutthe link failure model. Although the link failures and the Lapla-cians are independent over time, during the same iteration, thelink failures can still be spatially correlated. It is important toremark that we do not require the random instantiations ofthe graph be connected for all . We only require the graph to beconnected on average. This condition is captured by requiring
.
C. Dithered Quantization
We assume that each node encodes the message to be ex-changed with the other nodes using a uniform quantizer, witha finite number of bits , defined by the following vector map-ping,
(8)
where the entries of the vector , the quantization step ,and the error satisfy
,for all
(9)
The quantization alphabet is
(10)

3758 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 60, NO. 7, JULY 2012
Conditioned on the input, the quantization error is de-terministic. This induces a correlation among the quantizationerrors at different nodes and times, which may affect the con-vergence properties of the distributed algorithm. To avoid un-desired error correlations, we introduce dithering [41], [42]. Inparticular, the dither added to randomize the quantization effectssatisfies a special condition, namely the Schuchman conditions,as in subtractively dithered systems, [43]. Then, at every timeinstant , adding to each component a dither sequence
of i.i.d. uniformly distributed random variables onindependent of the input sequence, the resultant error
sequence becomes
(11)
The sequence is now an i.i.d. sequence of uniformlydistributed random variables on , which is independentof the input sequence. Thus, dithering renders the quantizationerrors independent of the input and uniformly distributed over
.
III. SWARM MODEL
In this section, we start recalling the swarm-based resourceallocation strategy proposed in [24] and [25] and then we gen-eralize it in order to accommodate random communication im-pairments. The problem we wish to solve is the assignment oftime and/or frequency slots to cognitive (or femto) users in orderto minimize interference towards primary (or macrocell) usersand avoid conflicts among the cognitive users, while keepingthe spread in frequency and time as reduced as possible. A cen-tralized controller knowing the spatial distribution of the pri-mary users’ activity in the time-frequency domain, as perceivedby each cognitive node, could solve this nontrivial assignmentproblem. However, besides the computational complexity as-pects, a centralized approach would require a lot of signalingbetween the secondary nodes and the controller. Furthermore,since femto-access points are owner-operated devices, they arenot necessarily under the control of a central authority. It is thenof interest to examine decentralized resource assignment tech-niques. We formulate the problem as follows. We consider a setof secondary users interested in using resources in an -di-mensional Euclidean space. A typical setting is the case wherethe resource domain is a time-frequency frame, as in the 4 Gmo-bile communication standard LTE, for example (in which case
). In such a case, every secondary user aims to access thetime and/or frequency slots that are temporarily vacant. To keepthe notation general, the (time/frequency) coordinates of the slotselected by agent are denoted by the vector . We alsodenote by the power sensed by the th cognitive node overthe slot having coordinate vector . The goal of node is to se-lect the time-frequency slot, having coordinates , whereis minimum. At the same time, each node wants to prevent con-flicts with the other SU’s, yet avoiding an excessive spread overthe resource domain. The mutual interference among the SU’scan be modeled as an undirected graph , whose ver-tices are the SU nodes and there is a link (edge) between two
nodes if the distance between them is less than a coverage ra-dius dictated by the minimum SNR required at the receiver. Theresource allocation problem for node can then be formulatedmathematically as the search, by node , of the vector thatminimizes the function
(12)
where the second term on the right-hand side (RHS) of (12)includes a short range repulsion term , whosepurpose is to avoid collisions between node and its neighbornodes, and a long range attraction term , whosegoal is to prevent an excessive spread of the selected radioresources in the time-frequency domain. Making each nodeminimize the function given in (12) is equivalent to havingthe whole population of cognitive nodes minimize the globalfunction
(13)
where . This function is reminis-cent of the social utility function used in [20], [21] to model aswarm moving in search of forage. In [20] and [21], the swarmwas supposed to move in space in order to maximize a functionhaving the same form as in (13), where the first term had themeaning of a spatial distribution of forage, whereas in our casewe wish to minimize a function whose first term represents theinterference sensed by the cognitive users. The role of the at-traction/repulsion terms in the two cases are reversed, becauseour goal is to minimize the function given in (13). In spite ofthe similarities of the mathematical problems, it is important toremark that while the swarming model studied in [20] and [21]assumes full connectivity, in our case every node interacts onlywith a few neighbors and the links are on/off randomly.One way to achieve the distributed minimization of (13) is
to use a gradient-descent optimization procedure, so that nodestarts with an initial guess, say , and then updates it overtime according to the following dynamical system:
(14)
, with and where
(15)
The vector functions and arethe gradients of and

DI LORENZO et al.: DECENTRALIZED RESOURCE ASSIGNMENT IN COGNITIVE NETWORKS 3759
Fig. 1. Example of coupling function with linear attraction and bounded repul-sion, where , , and .
with respect to , respectively. In this paper we consider alinear attraction term, i.e.
(16)
and a bounded repulsion term, i.e.
(17)
This choice of the attraction and repulsion functions leads to acoupling function that is continuously differentiable withbounded partial derivatives. An example of the resulting attrac-tion and repulsion behavior is shown in Fig. 1. By construction,there is a unique distance at which the attraction and repulsionforces balance: the so called equilibrium distance in the bi-ological literature [38], [39]. The dots in Fig. 1 identify theequilibrium distance between attraction and repulsion forces;this distance can be properly adjusted acting on the parameters, and . To avoid conflicts among the SU’s allocations,
this distance is chosen proportional to the bandwidth of a singlefrequency slot (in the frequency domain), or to the duration ofthe elementary time slot (in the time domain). We further notethat the coefficients depend on the distance between thenodes because two nodes can communicate with each otheronly if their distance is less than the coverage radius. Hence,in our setting, two nodes and with no direct link betweenthem (i.e., with ), are allowed to end up with the sameallocation vector in the resource space; the occurrence of thisevent is what is known as spatial reuse of frequency or timeslots.The updating rule (14) is distributed because each node inter-
acts only with a small subset of neighbors requiring short-rangecommunications. Moreover, each individual in the swarm needs
to estimate local quantities such as the gradient of the interfer-ence level, evaluated at , and the balance of attraction andrepulsion forces with the neighbors. Considering the attractionand repulsion features in (16) and (17), the potential function(13) can be written1 as
(18)
where denotes the trace of a matrix. The quantitiesand are defined as
(19)
(20)
where denotes the symmetric state-dependent adjacencymatrix whose entries are given by
(21)
In our setup, the profile represents the interference poweron the resource domain as perceived by node , hence, the term
is always positive. Moreover, the matrix is posi-tive semi-definite for all . This implies that the correspondingquadratic form in (18) is always nonnegative, thus leading to
for all . The assumptions needed for our subsequentderivations are the following.
Assumption A.1: There exists a constant such that
(22)
This assumption requires the gradients of the individualprofiles to be bounded. This hypothesis is reasonable in thecontext of interest.Assumption A.2: Given the initialization vector , the set
is compact.In our application, the resource allocation domain, eithera frequency band or a time interval (or both), is alwaysa compact set. The incorporation of the frequency and/ortime interval limits in our problem can be done either im-posing box constraints on our optimization or by addinga barrier to the interference profiles , for all , i.e.,
1In the following, we drop the dependency on time to avoid an excessiveovercrowding of the formulas.

3760 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 60, NO. 7, JULY 2012
a positive continuous term that starts from the boundaryof the resource domain and goes to infinity linearly2, withconstant derivative , in order to keep satisfying Assump-tion A.2. Under this choice, Assumption A.1 holds true.We follow this second approach.Assumption A.3: To ensure swarm cohesion and, hence,a finite swarm size, we assume that the graph describingthe network topology is connected. As indicated earlier,due to the random nature of the network graph, we onlyrequire the topology to be connected on average. This con-dition is captured by enforcing the second smallest eigen-value of the expected Laplacian to be strictly positive, i.e.,
.
IV. STOCHASTIC CONVERGENCE
In this section we reformulate the swarming problem asthe search for the zeros of a deterministic function, whoseobservation is corrupted by a random disturbance. We willprovide conditions for the almost sure convergence of thesearch procedure. In an ideal communication case, since (13) isLipschitz-continuous and bounded from below, it is possible toprove the convergence of a discrete-time gradient algorithm byusing a classical descent approach [44]. Then, by selecting thestep-size of the algorithm to be sufficiently small (smaller thanthe inverse of the Lipschitz constant), the discrete-time versionof the iterative procedure (14) will asymptotically convergeto a local minimum of the potential function (13). However,in a realistic communication scenario, the links among theSU’s may fail randomly and the exchanged data are corruptedby quantization noise. Furthermore, the interference value andits gradient are going to be known only within an inevitableestimation error. In particular, we denote the estimate of thegradient by
(23)
where is a zero mean i.i.d. vector noise sequence ofbounded variance. Under these nonideal conditions, the con-vergence of (14) to a local minimum is not assured and theswarming algorithm needs to be properly adjusted to guaranteeconvergence.The swarm evolution (14) has been described, so far, in con-
tinuous time. In practice, the implementation is generally per-formed in discrete-time. A discrete time version of (14) that ac-counts for random link failures, dithered quantization noise andestimation errors, can be written as
(24)
2To preserve continuity it is also necessary to ensure a smooth transitionfrom the original interference profile to the modified profile incorporating thebarrier.
, where is a positive iteration dependentstep-size. Now, exploiting the feature of subtractively ditheredsystems in (11), the previous expression can be recast as
(25)
. Starting from some initial position in the re-source domain, , each node generates via (25) a se-quence of resource allocations, . The positionat the th node at time is a function of: its previous po-
sition, the communicated quantized positions at time of itsneighboring sensors, and the new estimate of the profile gra-dient . As described in Section II-B, the data aresubtractively dithered-quantized, so that the quantized data re-ceived by the th sensor from the th sensor at time is
. It then follows from the discussion in Section II-B thatthe quantization error is a random vector, whose compo-nents are i.i.d., uniformly distributed on , and indepen-dent of . In the presence of small quantization noise, wecan appeal to a first-order Taylor approximation of the vectorfunction , and approximate the recursion (25) as
(26)
where is the Jacobian matrix of evaluatedat . Now, exploiting the structure of the func-tion in (15) and the features of linear attraction in (16) andbounded repulsion in (17), the recursion (26) can be expressedas
(27)

DI LORENZO et al.: DECENTRALIZED RESOURCE ASSIGNMENT IN COGNITIVE NETWORKS 3761
. To rewrite (27) in compact form, we introducethe random vectors and with vector com-ponents
(28)
The vectors and are the state-dependent aggregatedcontribution of quantization noise and dithering. It follows fromthe conditions on the dither, that
(29)
from which we get
(30)
with . To provethe validity of the bound in (30), we still have to show that
is finite or upper bounded by a finite value. The choiceof the coupling function in (16) and (17), with linear at-traction and bounded repulsion, ensures the boundedness of thepartial derivatives in . In the scalar case, this is straight-forward to see. Indeed, in this case
(31)
and it is easy to see that can assume only bounded values.In the vector case, in the same way, we can guarantee that theelements of are also bounded. Then, as a consequenceof Gershgorin disk theorem [45], the eigenvalues of the matrix
assume bounded values. Let denote themaximum value (in modulus) assumed by the elements of
, . Then, by Gershgorin theorem [45], an upperbound for is given by .The overall evolution dynamics can then be expressed in
compact form as
(32)
where and are the state dependent aggre-gated contribution of quantization noise in (28),
, andis the overall estimation noise vector. The state-dependentLaplacian matrix is given by
(33)
where denotes the symmetric state-dependent adjacencymatrix whose entries are given by
(34)We consider four assumptions:
Assumption B.1: (Estimation noise) We assume that theobservation noise process in(23) is an i.i.d. zero mean process, with finite second ordermoment, i.e.
(35)
Assumption B.2: (Independence) The sequences, , and are
mutually independent.Assumption B.3: (Markov) Consider the filtration
, given by
(36)
where denotes sigma algebra. It then follows thatthe random quantities , , and areindependent of , implying is a Markovprocess.Assumption B.4: (Persistence) To obtain convergence, weassume that the step-size sequence satisfies the fol-lowing conditions:
(37)
Conditions (37) ensure that the step-size decays to zero, butnot too fast. An example of step-size sequence that satisfies(37) is , with and .
The following theorem presents a classical result from sto-chastic approximation theory from [46] regarding the conver-gence properties of generic stochastic recursive procedures; theresult will be used to establish the convergence of the swarmingalgorithm.Theorem 1: Let be a random vector defined by the
difference equation
(38)
with initial condition , whereis Borel-measurable, is a family of zero-meanrandom vectors in , defined on some probability space

3762 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 60, NO. 7, JULY 2012
, and is a canonical element of . Considerthe following set of conditions:
Condition C.1: The function ismeasurable3 for all .
Condition C.2: There exists a filtration of, such that, for every , the family of random vectors
is measurable and independent of4
Condition C.3: There exists a nonnegative functionwith bounded second-order partial derivatives
satisfying the conditions
(39)
(40)
where denotes the inner product operator,is the solution set and
.Condition C.4: There exist a constant , such that
(41)
Condition C.5: The step size sequence satisfies(37).
Let the conditions C.1–C.5 hold for the process .Then, is a Markov process and, starting from an ar-bitrary initial condition , it converges almost surely (a.s.) as
, either to a point of the solution set, or to the boundary of one of its connected components.Proof: The proof can be found in [46] (Theorem 5.2.3).
In the following, we will use Theorem 1 to establish the a.s.convergence of the iterative swarming procedure (32). We startby decomposing the state dependent Laplacian matrixinto the sum of its expected value , conditioned to vector ,plus a zero mean random fluctuation . As a consequence,(32) can be written as
(42)
In the notation of Theorem 1, (42) can be recast as in (38) where
(43)
(44)
In this way, the original swarming problem has been convertedinto the search for the zeros of the deterministic function
, whose value is measured at different instantsand corrupted by an additive zero-mean random disturbance
. We are now able to state the main theorem of theswarming behavior in the presence of random disturbances.
3 denotes the Borel algebra of .4Under conditions C.1 and C.2, the random vector sequence is a
Markov process.
Theorem 2: Consider the discrete swarming algorithm in (25)with arbitrary initial state . Under the hypothesis of a smalladditive quantization noise and the assumptions A.1–A.3 andB.2–B.3, the algorithm converges almost surely (a.s.) asto one of the zeros of the function in (43) or, equivalently,to a local minimum of the function in (13) evaluated forthe expected graph. Then
(45)
where is the standard Euclidean norm andis the solution set.
Proof: The proof follows by showing that the process, generated by the swarming algorithm, satisfies
the conditions C.1–C.5 of Theorem 1. Recall the filtrationgiven in (36). Under the Assumptions B.1–B.4, the randomfamily is measurable, zero mean andindependent of . As a consequence, the conditions C.1, C.2of Theorem 2 are satisfied and the random vector sequence
is a Markov process. We will show now the ex-istence of a stochastic potential function such that theswarming algorithm in (32) satisfies the conditions C.3, C.4.To this end, we define
(46)
where has the same structure as (20), (21), except for thefact that the underlying graph structure is now the expectedvalue of the graph. As a consequence, (46) plays the role ofthe potential function relative to the expected graph. As shownfor the expression in (18), is a nonnegative func-tion and, under the profile’s smoothness assumptionA.1 and thechoice of attraction and repulsion functions in (16) and (17), ithas bounded second-order partial derivatives. Under Assump-tion A.3, the vector lies in a subspace orthogonal to
, where denotes the nullspace of a matrix. Hence, ap-plying (3) and considering the expression of in (6),we find that (46) admits the lower bound
(47)
It is then straightforward to verify that the potential functionsatisfies . After a few algebraic
manipulations, the gradient of can be expressed as
(48)
where is given in (33). Hence, it follows that
(49)

DI LORENZO et al.: DECENTRALIZED RESOURCE ASSIGNMENT IN COGNITIVE NETWORKS 3763
Thus, condition C.3 of Theorem 2 is satisfied. From (43), ap-plying the Cauchy-Schwartz inequality, we get the followingupper bound:
(50)
Under assumption A.1, we have , and the pre-vious bound can be recast as
(51)
where is the maximum (in modulus) eigenvalue of .The state dependent mean Laplacian in (33)depends on through a bounded function. Hence, for any valuesof the swarm constants , and , there always exists aconstant such that and
(52)
where , , and .
Now, adding the nonnegative term , the previousbound becomes
(53)
where and . From (44) and theassumption B.2
(54)
The eigenvalues of the Laplacian error are bounded be-cause this matrix takes values from a finite set and it dependson the state through a bounded function. Then, consideringthe bounds in (30) and (35), we get
(55)
where and .We then have from (53) and (55)
(56)
where and . Ex-ploiting now Assumption A.3, the vector lies in a subspaceorthogonal to and, under the assumption that the
repulsion force is strong enough to avoid the overall collapse ofthe swarm onto the center, the overall consensus over is neverreached. This means that the inequality
holds for all , and, substituting it in (56), weget
(57)
where . Summing now the potential functionin (46) to the last expression, we can write the bound
(58)
where and . Thisverifies also condition C.4 of Theorem 1 and condition C.5 issatisfied by the choice of made in the B.4. All theconditions of Theorem 1 are satisfied and the convergence resultfollows, thus concluding our proof.
V. FAST ADAPTIVE SWARMING ALGORITHM
Natural swarms are adaptive systems whose individuals co-operate in order to improve their food search capabilities andto increase their robustness against predator attacks [14]. Inthis context, it typically happens that the individuals closer to apredator would move faster to avoid the dangerous zone, whileindividuals closer to food would tend to slow down. Mimickingthis natural behavior, we propose an alternative distributed min-imization of (13) based on a scaled gradient optimization, sothat every node starts with an initial guess and updates its ownresource allocation vector according to the following dy-namical system:
(59)
where and the functions aremonotonically increasing functions of the interference powerperceived by every node. Examples include linear, quadratic,logarithmic functions, etc. Calling again upon the analogy withthe swarm behavior, the occupied zones in the resource domainrepresent “dangerous” regions from which the agents should es-cape as fast as possible, while idle bands represent regions richin food where the agents would like to stay. The goal is there-fore to accelerate the motion of the nodes when they perceive

3764 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 60, NO. 7, JULY 2012
regions of high interference and to slow down the nodes nearidle bands. The proposed update (59) adapts its behavior withrespect to the interference power, thus increasing the speed ofconvergence and reducing the reaction time needed by the nodesto react to dynamic changes in the environment. As we willshow in the simulation section, this adaptive behavior consid-erably improves the performance of the algorithm.1) Stochastic Convergence: As in the preceding section, con-
sidering the presence of random disturbances, the discretizationof (59) can be recast in compact form as
(60)
where . In the nota-tion of Theorem 1, (60) can be written as in (38) where
(61)
(62)
The following convergence result then holds for the adaptiveswarming algorithm in (60).Theorem 3: Consider the discrete swarming algorithm in (60)
with arbitrary initial state . Under the hypothesis of a smalladditive quantization noise and the assumptions A.1–A.3 andB.1–B.4, the algorithm converges a.s. as to one of thezeros of the function in (61) or, equivalently, to a localminimum of the function in (13) evaluated for the meangraph. That is
(63)
where is the standard Euclidean metric norm andis the solution set.
Proof: The proof follows the same steps as in Theorem 2.Under assumptionB.3, the sequence generated by the swarmingalgorithm in (60) is a Markov process. We consider again thenonnegative function in (46). Since in (61) is ascaled gradient descent direction for the optimization of ,it is easy to show that the Lyapunov condition in (40) is alwaysverified for all outside the solution set . Applying now theassumptions A.1, A.3, B.1 and B.2 and considering the bound-edness of the eigenvalues of the diagonal matrix , somealgebraic manipulations show that the inequality in (41) holds,thus concluding the proof.Remark: Thematrix in (60) is a full rankmatrix. Hence,
the zeros of the function in (61) coincide with those of thefunction in (43).In Section VI we present some numerical results illustrating
how the proposed algorithm (59) greatly outperforms the basicswarming algorithm (14) in terms of convergence speed andresilience against channel imperfections.
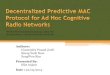
Fig. 2. Secondary network. The square nodes denote primary users and thecircle nodes denote secondary users.
VI. NUMERICAL EXAMPLES
1) Numerical Example 1—Swarming in the Presence of LinkFailures, Quantization and Estimation Errors: The purpose ofthis first example is to show the performance of the proposedallocation algorithm in the presence of random packet drops,errors in the estimation of the profile gradient and quantizationnoise. We consider a connected network composed of 15 SU’s,plus two PU’s. The topology of the network corresponding tothe case in which all packets are correctly delivered is shown inFig. 2, where the SU’s are represented by dots, while the PU’sare indicated by squares. We consider two examples of inter-ference profiles (supposed to be the same for all the nodes), asshown in Fig. 3, where the the continuous curve represents thetrue spectrum, whereas the dashed lines report the noisy obser-vation. The number of resources (frequency subchannels) to beallocated is assumed to be 15, equal to the number of cogni-tive users. The resources are initially scattered randomly acrossthe frequency spectrum. At the th iteration of the updatingrule (25), each node communicates to its neighbors the posi-tion it intends to occupy, i.e., the scalar representing afrequency subchannel. Because of fading and additive noise, acommunication link among two neighbors has a certain proba-bility to be established correctly. The values to be exchangedare also affected by quantization noise, supposed to be smallwith respect to the bandwidth of the frequency subchannel. Theerror in the estimation of the profile gradient is assumed to beGaussian distributed with zero mean and variance . Twoexamples of resource allocation are shown in Fig. 3, where thedots represent the final frequency channels chosen at conver-gence by the network nodes. The parameters of the swarm are
, , and we considered .In both cases, it is evident how the resources avoid the positionoccupied by primary users, tend to keep the spread as small aspossible while avoiding collisions among the allocations of dif-ferent users. Observe that the number of allocated channels isless than the number of requested resources. This means that acertain number of nodes have picked up the same channels. We

DI LORENZO et al.: DECENTRALIZED RESOURCE ASSIGNMENT IN COGNITIVE NETWORKS 3765
Fig. 3. Examples of resource allocation by swarming.
Fig. 4. Average interference perceived by the swarm versus time index, fordifferent probabilities of correct packet reception.
have checked numerically that, by choosing appropriately theswarm parameters, the final channel allocation does not lead tocollisions among spatial neighbors. This means that the algo-rithm is capable of implementing a decentralized mechanismfor spatial reuse of frequencies.To show the effect of link failures on resource allocation, in
Fig. 4 we report the average interference level perceived by theswarm versus the iteration index, averaged over 100 indepen-dent realizations of random drops. We consider different proba-bilities of correct packet reception; the ideal case, which cor-responds to , is shown as a benchmark. The interferenceprofile is the one shown in the left-hand side (LHS) of Fig. 3;the network topology is the one depicted in Fig. 2, the swarmparameters are , , . The iterationdependent step size is given by , with , inorder to satisfy (37). From Fig. 2 we notice that, after sufficienttime, the network always reaches an equilibrium state that co-incides with a swarm cohesion in the low interference regionof the spectrum. Interestingly, we can observe that the final in-terference level is always the same, independently of the linkfailure probability . From Fig. 4, we see that the only effectof the random link failures is to slow down the convergence, butwithout affecting the final average interference level perceived
Fig. 5. Average interference perceived by the swarm at convergence, versus theprobability to establish a communication link, for different values of the swarmattraction parameter .
by the swarm. This observation illustrates the robustness of theproposed algorithm.In some applications, the number of iterations must be limited
to avoid excessive delays. It is then of interest to assess theperformance of the distributed resource allocation strategy,fixing a maximum number of iterations . To this end, inFig. 5 we report the average interference level perceived by theswarm, versus the probability to establish a communicationlink, averaged over the frequency slots occupied by the SU’s,after iterations. The results are averaged over 100independent realizations, considering three different values ofthe swarm attraction parameter . The other parameters of theswarm are , ; the iteration dependent step size ischosen as before, with . From Fig. 5, we notice that, forthat given number of iterations, at low values of the probability, the interference perceived by the swarm is high because somenodes are trapped in regions occupied by the primary users andcharacterized by a low gradient profile. This happens becausethe duration of the iterative algorithms has not been sufficient tomove out the resources trapped in wrong locations. However,as increases, the perceived interference decreases becausethe attraction exerted by the swarm is finally able to move the

3766 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 60, NO. 7, JULY 2012
Fig. 6. Average convergence time versus number of nodes, for different number of bits used for quantization (left) and for different degrees of network connectivity(right).
resources toward the interference-free region. What is alsointeresting to observe fromFig. 5 is that, increasing the attractionparameter, for any given , the performance of the resourceallocation improves. This example shows that the cohesion forcerepresents an intrinsic robustness factor of the algorithm. Infact, resources allocating over high interference bands mightmeasure a flat spectrum, thus resulting in limited capabilities tomove out of (flat) occupied bands, if the only cause of change isthe spectrum gradient. However, increasing the cohesion force,the agents allocating over the low interference band tend toform cohesive blocks that exert an attraction towards the agentstrapped bymistake over theflat regions of the spectrumoccupiedby the primary users. This is an example of cooperation gain.Finally, it is of interest to check the effect of network size
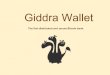
and quantization noise on the convergence rate. On the LHSof Fig. 6, we report the average number of iterations neededby the algorithm to converge versus the number of nodes com-posing the network, averaged over 200 different network con-figurations, considering different numbers of bits to quantize theexchanged messages. The ideal case, which corresponds to ab-sence of quantization, is shown as a benchmark. The networkgraph is a random geometric graph with node’s covering radius
, where tunes the average networkconnectivity. The swarm parameters are , ,
, and the initial step size is . As expected, fromFig. 6(a), we can notice how, increasing the number of nodes andreducing the number of bits used for quantization, the algorithmneeds more time to converge. In a noise-free case, a higher net-work connectivity implies faster convergence, whereas, in thenoisy case, the algorithm needs more time to converge due tothe larger variance of the disturbance that affects the system. Toshow this behavior, on the RHS of Fig. 6, we repeat the previoussimulation, fixing the number of quantization bits to andconsidering different values of the network connectivity param-eter . As we can notice from Fig. 6(b), increasing the networkconnectivity, the algorithm needs more time to converge.
Fig. 7. Average interference perceived by the swarm versus time index, fordifferent algorithms and probabilities of correct packet reception.
2) Numerical Example 2—Effect of Adaptation on Perfor-mance: In this example, we aim to show the benefits achievableby introducing adaptation and learning as in (59). We considerlinear scaling functions ,where
(for all ) and the slope parameter is chosen in orderto increase the convergence speed of the nodes perceiving a highinterference. We assume the presence of the interference profileshown in the LHS of Fig. 3 and the network topology depicted inFig. 2. In the first example we compare the convergence speed ofthe gradient based swarming algorithm and the adaptive methodin (59) with scaling coefficients weighted by the perceived inter-ference power. In Fig. 7, we report the average interference levelperceived by the swarm, averaged over 100 independent realiza-tions, versus the iteration index, considering two different valuesof probability to establish a link. In the simulation, we considera linear scaling functionwith parameters and forall . The parameter of the swarm are , ,

DI LORENZO et al.: DECENTRALIZED RESOURCE ASSIGNMENT IN COGNITIVE NETWORKS 3767
Fig. 8. Average interference perceived by the swarm at convergence, versusthe slope parameter of the linear scaling functions, for different probabilitiesof correct packet reception and different values of the swarm attraction param-eter .
and the step size is chosen such that for both the algo-rithms. The simulation shows how the swarming algorithm withadaptive scaling is robust with respect to link failures, achievingthe same performance level of the basic algorithm and greatlyoutperforming it in terms of convergence speed. This means thatthe convergence time of the swarming algorithm can be con-siderably reduced if every node adapts its convergence speedaccording to the perceived interference.To measure the effectiveness of the distributed resource allo-
cation strategy in the presence of a limited maximum number ofiterations, in Fig. 8 we report the interference level, versus theslope parameter of the linear scaling functions, averaged overthe frequency slots occupied by the SUs, after itera-tions. The result is averaged over 100 independent realizations.We considered two different values of the probability and ofthe swarm attraction parameter . The other swarm parametersare equal to and . From Fig. 8, we notice that,at low values of the parameter , the movement of the resourcesis very limited and, inside the maximum number of iterations,some resources cannot move out form the regions occupied bythe primary users because of the random impairments affectingthe algorithm. As increases, the resources perceiving a highpower move faster toward the interference-free region due tothe increment of the average profile gradient and the cohesionforce, thus making the overall swarm experience a smaller totalinterference. This means that the performance of the swarmingalgorithm can be considerably improved if every node adaptsits scaling function according to the perceived interference. Fur-thermore, from Fig. 8, we notice how an increment of the cohe-sion force induces a better performance thanks to the coopera-tion among network nodes, similarly to what we had observedfrom Fig. 5. From Fig. 8, we also notice, as expected, how alower probability to establish a communication link determinesworst performance.3) Numerical Example 3—Distributed Graph Coloring: One
of the most interesting features of the proposed swarming tech-
Fig. 9. Example of resource allocation by swarming. The symbol assigned toeach vertex indicates the channel chosen by each cognitive node.
nique is its capability to induce a spatial reuse of frequencychannels from secondary nodes far away from each other, usinga decentralized approach under random packet dropping. As anexample of channel allocation, in Fig. 9 we consider a networkcomposed of 50 nodes, where each node senses the interferenceprofile shown in the LHS of Fig. 3. The swarm parameters are
, and . Every node starts froma random initial position on the spectrum, and then it updatesits intended position according to (25), where the probabilityto establish correctly a communication link between secondaryusers is . In the application at hand, there is an intrinsicquantization of the frequency resources given by the subchannelbandwidth. In our implementation, we let the system evolve ac-cording to (25) until successive differences in allocation becomesmaller than the bandwidth of a frequency subchannel. At thatpoint, the evolution stops and every SU is allowed to transmitover the selected channel. The channel chosen by each cogni-tive node at the end of the iterations is indicated by the symbolassigned to each vertex in Fig. 9. Each symbol identifies a fre-quency subchannel uniquely. In our simulation, the low inter-ference band on the spectrum is divided in 8 different channels.Hence, the number of available resources is much smaller thanthe number of users. From Fig. 9 we can observe that the nodesthat have picked up the same channel are never neighbor ofeach other. This shows the capability of the proposed methodto implement a decentralized mechanism for spatial reuse offrequencies.
VII. CONCLUSION
In this paper we have proposed and studied a decentralizedswarming algorithm for allocating resources in cognitive radionetworks in the presence of channel imperfections, such as linkfailures, estimation errors, and quantization noise, mimickinga swarm mechanism. We proved that the swarm converges al-most surely to an equilibrium configuration dependent on the

3768 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 60, NO. 7, JULY 2012
expected graph of the network.We also showed that the resourceallocation algorithm is robust against channel random link fail-ures, quantization noise and estimation errors, whose effect isonly to slow down the convergence process. In particular, re-ducing the probability to establish a communication link, thenetwork requires more time to reach the final equilibrium state.Simulation results show that the cohesion force introduces co-operation gain among the SU’s and represents an intrinsic ro-bustness factor of the algorithm. Finally, we have proposed aswarm algorithm that adapts the speed of the individuals ac-cording to the perceived interference distribution resulting inan improved allocation performance, convergence speed, adap-tation and learning capability. In this paper, we have consid-ered simple sensing algorithms, as our goal was to study dis-tributed resource allocation through swarming. Future exten-sions might incorporate collaborative sensing techniques, suchas for example [12], [47], [48], within the swarming mechanismproposed in this paper.
REFERENCES
[1] Q. Zhao and B. M. Sadler, “A survey of dynamic spectrum access,”IEEE Signal Process. Mag., vol. 24, no. 3, pp. 79–89, May 2007.
[2] F. Dressler and O. B. Akan, “A survey on bio-inspired networking,”Elsevier Comput. Netw., vol. 54, no. 6, pp. 881–900, Apr. 2010.
[3] F. Dressler and O. B. Akan, “Bio-inspired networking: From theoryto practice,” IEEE Commun. Mag., vol. 48, no. 11, pp. 176–183, Nov.2010.
[4] S. Barbarossa and G. Scutari, “Bio-inspired sensor network design:Distributed decision through self-synchronization,” IEEE SignalProcess. Mag., vol. 24, no. 3, pp. 26–35, May 2007.
[5] R. Pagliari, Y.-W. Hong, and A. Scaglione, “Bio-inspired algorithmsfor decentralized round-robin and proportional fair scheduling,” IEEEJ. Sel. Areas Commun., vol. 28, no. 4, pp. 564–575, May 2010.
[6] X. Liang and Y. Xiao, “Studying bio-inspired coalition formation ofrobots for detecting intrusions using game theory,” IEEE Trans. Syst.,Man, Cybern., Part B, vol. 40, no. 3, pp. 683–693, Jun. 2010.
[7] T. Renk, C. Kloeck, D. Burgkhardt, F. K. Jondral, D. Grandblaise, S.Gault, and J. C. Dunat, “Bio-inspired algorithms for dynamic resourceallocation in cognitive wireless networks,” in Proc. Int. Conf. Cogn.Radio Oriented Wireless Netw. Commun. (CrownCom), Orlando, FL,Aug. 2007, pp. 351–356.
[8] F. R. Yu, M. Huang, and H. Tang, “Biologically inspired consensus-based spectrum sensing in mobile ad hoc networks with cognitive ra-dios,” IEEE Networks, vol. 24, no. 3, pp. 26–30, May-Jun. 2010.
[9] B. Atakan and O. B. Akan, “Biologically-inspired spectrum sharingin cognitive radio networks,” in Proc. IEEE Wireless Commun. Netw.Conf. (WCNC07), Hong Kong, Mar. 2007, pp. 43–48.
[10] X. Mao and H. Ji, “Biologically-inspired distributed spectrum accessfor cognitive radio network,” in Proc. Int. Conf. Wireless Commun.Netw. Mobile Comput. (WiCOM), Wuhan, Sep. 2010, pp. 1–4.
[11] C. G. Lopes and A. H. Sayed, “Diffusion least-mean squares over adap-tive networks: Formulation and performance analysis,” IEEE Trans.Signal Process., vol. 56, no. 7, pp. 3122–3136, Jul. 2008.
[12] F. S. Cattivelli and A. H. Sayed, “Diffusion LMS strategies fordistributed estimation,” IEEE Trans. Signal Process., vol. 58, pp.1035–1048, Mar. 2010.
[13] F. Cattivelli and A. H. Sayed, “Modeling bird flight formations usingdiffusion adaptation,” IEEE Trans. Signal Process., vol. 59, no. 5, pp.2038–2051, May 2011.
[14] S.-Y. Tu and A. H. Sayed, “Mobile adaptive networks,” IEEE J. Sel.Topics Signal Process., vol. 5, no. 4, pp. 649–664, Aug. 2011.
[15] J. Chen, X. Zhao, and A. H. Sayed, “Bacterial motility via diffusionadaptation,” in Proc. 44th Asilomar Conf. Signals, Syst. Comput., Pa-cific Grove, CA, Nov. 2010, pp. 1930–1934.
[16] J. Chen and A. H. Sayed, “Bio-inspired cooperative optimization withapplication to bacteria motility,” in Proc. ICASSP, Prague, Czech Re-public, May 2011, pp. 5788–5791.
[17] R. Olfati-Saber and R. M. Murray, “Consensus protocols for networksof dynamic agents,” in Proc. 2003 Amer. Contr. Conf., Denver, Jun.4–6, 2003.
[18] R. Olfati-Saber, “Flocking for multi-agent dynamic systems: Algo-rithms and theory,” IEEE Trans. Autom. Control, vol. 51, no. 3, pp.401–420, Mar. 2006.
[19] V. Gazi and K.M. Passino, “Stability analysis of swarms,” IEEE Trans.Autom. Control, vol. 48, no. 4, pp. 692–697, Apr. 2003.
[20] V. Gazi and K. M. Passino, “A class of attractions/repulsion func-tions for stable swarm aggregations,” Int. J. Contr., vol. 77, no. 18,pp. 1567–1579, 2004.
[21] V. Gazi and K. M. Passino, “Stability analysis of social foragingswarms,” IEEE Trans. Syst., Man, Cybern.—Part B: Cybern., vol. 34,no. 1, pp. 539–557, Feb. 2004.
[22] W. Li, “Stability analysis of swarms with general topology,” IEEETrans. Syst., Man, Cybern.—Part B: Cybern., vol. 38, no. 4, pp.1084–1097, Aug. 2008.
[23] A. Jadbabaie, J. Lin, and A. S. Morse, “Coordination of groups of mo-bile autonomous agents using nearest neighbor rules,” IEEE Trans.Autom. Control, vol. 48, no. 6, pp. 988–1001, Jun. 2003.
[24] P. Di Lorenzo and S. Barbarossa, “Distributed resource allocation incognitive radio systems based on social foraging swarms,” in Proc.11th IEEE Int. Workshop on Signal Process. Adv. Wireless Commun.(SPAWC), Marrakech, Jun. 2010, pp. 1–5.
[25] P. Di Lorenzo and S. Barbarossa, “A bio-inspired swarming algorithmfor decentralized access in cognitive radio,” IEEE Trans. SignalProcess., vol. 59, no. 12, pp. 6160–6174, Dec. 2011.
[26] P. Di Lorenzo and S. Barbarossa, “Bio-inspired swarming models fordecentralized radio access incorporating random links and quantizedcommunications,” in Proc. ICASSP 2011, Prague, May 2011, pp.5780–5783.
[27] R.Olfati-Saber andR.M.Murray, “Consensus problems in networks ofagents with switching topology and time-delays,” IEEE Trans. Autom.Control, vol. 49, no. 9, pp. 1520–1533, Sep. 2004.
[28] H. Shi, L. Wang, T. Chu, G. Xie, and M. Xu, “Flocking coordinationof multiple interactive dynamical agents with switching topology,” inProc. IEEE Int. Conf. Syst., Man, Cybern. (SMC), Taipei, Oct. 2006,pp. 2684–2689.
[29] H. G. Tanner, A. Jadbabaie, and G. J. Pappas, “Flocking in fixed andswitching networks,” IEEE Trans. Autom. Control, vol. 52, no. 5, pp.863–868, May 2007.
[30] J. Hu, J. Yao, and L. Wang, “Cohesiveness analysis of hybrid swarmsystems based on artificial potential functions,” in Proc. Int. Conf.Model., Identif. Contr. (ICMIC), Okayama, Jul. 17–19, 2010, pp.639–644.
[31] Z. Li, Y. Jia, J. Du, and S. Yuan, “Flocking for multi-agent systemswith switching topology in a noisy environment,” inProc. Amer. Contr.Conf., Seattle, WA, Jun. 2008, pp. 111–116.
[32] R. Olfati-Saber, J. A. Fax, and R. M. Murray, “Consensus and coop-eration in networked multi-agent systems,” Proc. IEEE, vol. 95, no. 1,pp. 215–233, Jan. 2007.
[33] Y. Hatano, A. K. Das, and M. Mesbahi, “Agreement in presence ofnoise: Pseudogradients on random geometric networks,” in Proc.IEEE Conf. Decision and Control (CDC), Seville, Spain, Dec. 2005,pp. 6382–6387.
[34] T. C. Aysal, M. Coates, and M. Rabbat, “Distributed average con-sensus using probabilistic quantization,” in Proc. IEEE/SP Workshopon Statist. Signal Process. Workshop (SSP), Madison, WI, Aug. 2007,pp. 640–644.
[35] M. Huang and J. Manton, “Stochastic approximation for consensusseeking: Mean square and almost sure convergence,” in Proc. IEEEConf. Decision Control (CDC), New Orleans, LA, Dec. 2007, pp.306–311.
[36] S. Kar and J. M. F. Moura, “Sensor networks with random links:Topology design for distributed consensus,” IEEE Trans. SignalProcess., vol. 56, no. 7, pp. 3315–3326, Jul. 2008.
[37] S. Kar and J. M. F. Moura, “Distributed consensus algorithms in sensornetworks with imperfect communication: Link failures and channelnoise,” IEEE Trans. Signal Process., vol. 57, no. 5, pp. 355–369, Jan.2009.
[38] A. Mogilner, L. Edelstein-Keshet, L. Bent, and A. Spiros, “Mutual in-teractions, potentials, and individual distance in a social aggregation,”J. Math. Biol., vol. 47, pp. 353–389, 2003.
[39] D. Grnbaum and A. Okubo, “Modeling social animal aggregations,” inFrontiers in Theoretical Biology. New York: Springer-Verlag, 1994.
[40] R. Olfati-Saber, J. A. Fax, and R. M. Murray, “Consensus and coop-eration in networked multi-agent systems,” Proc. IEEE, vol. 95, no. 1,pp. 215–233, Jan. 2007.
[41] S. P. Lipshitz, R. A. Wannamaker, and J. Vanderkooy, “Quantizationand dither: A theoretical survey,” J. Audio Eng. Soc., vol. 40, pp.355–375, May 1992.

DI LORENZO et al.: DECENTRALIZED RESOURCE ASSIGNMENT IN COGNITIVE NETWORKS 3769
[42] R. Wannamaker, S. Lipshitz, J. Vanderkooy, and J. Wright, “A theoryof nonsubtractive dither,” IEEE Trans. Signal Process., vol. 48, no. 2,pp. 499–516, Feb. 2000.
[43] L. Schuchman, “Dither signals and their effect on quantization noise,”IEEE Trans. Commun. Technol., vol. COMM-12, pp. 162–165, Dec.1964.
[44] D. P. Bertsekas and J. N. Tsitsiklis, Parallel and Distributed Compu-tation: Numerical Methods. Belmont, MA: Athena Scientific, 1997.
[45] R. A. Horn and C. R. Johnson, Matrix Analysis. Cambridge: Cam-bridge Univ. Press, 1985.
[46] M. Nevelson and R. Hasminskii, Stochastic Approximation and Recur-sive Estimation. Providence, RI: Amer. Math. Soc., 1973.
[47] F. Zeng, C. Li, and Z. Thian, “Distributed compressive spectrumsensing in cooperative multihop cognitive networks,” IEEE J. Sel.Top. Signal Process., vol. 5, pp. 37–48, Feb. 2011.
[48] Z. Li, F. R. Yu, and M. Huang, “A distributed consensus-based cooper-ative spectrum-sensing scheme in cognitive radios,” IEEE Trans. Veh.Technol., vol. 59, pp. 383–393, Jan. 2010.
Paolo Di Lorenzo (S’10) received the M.S. degreein 2008 and the Ph.D. degree in 2012, both from theUniversity of Rome “Sapienza,” Italy.He is currently a postdoc in the Department of
Information, Electronics and Telecommunications,University of Rome, “Sapienza.” During 2010,he held a visiting research appointment with theDepartment of Electrical Engineering, Universityof California at Los Angeles (UCLA). His primaryresearch interests are in bioinspired signal pro-cessing, distributed algorithms for communication
and sensor networks, and adaptive filtering, with special emphasis on stochasticoptimization and control.Dr. Di Lorenzo received three Best Student Paper Awards, respectively, at
the IEEE SPAWC’10, EUSIPCO’11, and CAMSAP’11, for works in the area ofsignal processing for communications and synthetic aperture radar systems.
Sergio Barbarossa (S’84–M’88–F’12) received theM.Sc. degree in 1984 and the Ph.D. degree in elec-trical engineering in 1988, both from the Universityof Rome “La Sapienza,” Rome, Italy.He is now a full professor at the University of
Rome “La Sapienza.” He has held positions asResearch Engineer with Selenia SpA (1984–1986);and with the Environmental Institute of Michigan(1988); and Visiting Professor with the Universityof Virginia (1995 and 1997); the University ofMinnesota (1999); and has taught short graduated
courses at the Polytechnic University of Catalunya (2001 and 2009). He hasbeen principal investigator in several international projects. He has been thescientific lead of the European project WINSOC, on wireless sensor networks,and he is currently the scientific lead of the European Project FREEDOM,on femtocell networks. He is a principal investigator in the European ProjectSIMTISYS, on the radar monitoring of maritime traffic from satellites. Heis also involved in the design of the radar system to be used for the landing
module of ExoMars, a spacecraft to be launched by the European SpaceAgency to land on Mars. His current research interests lie in the area of signalprocessing for self-organizing networks, vehicular networks, bioinspired signalprocessing, femtocell networks, graph theory, game theory, and distributedoptimization algorithms.Dr. Barbarossa has been nominated IEEE Fellow for his contributions to
signal processing, sensor networks, and wireless communications. He receivedthe 2010 EURASIP Technical Achievements Award, for his contributions tosynthetic aperture radar, sensor networks and communication networks. He re-ceived the 2000 IEEE Best Paper Award from the IEEE Signal Processing So-ciety. He is the coauthor of papers that received the Best Student Paper Awardat ICASSP 2006, SPAWC 2010, EUSIPCO 2011, and CAMSAP 2011. From1997 until 2003, he has been a member of the IEEE Technical Committee forSignal Processing in Communications. He served as an Associate Editor for theIEEE TRANSACTIONS ON SIGNAL PROCESSING for two terms (1998–2000 and2004–2006). He is now a member of the IEEE SIGNAL PROCESSING MAGAZINEEditorial Board. He has been the General Chairman of the IEEE Workhop onSignal Processing Advances in Wireless Communications (SPAWC) 2003. Hehas been the Guest Editor for Special Issues on the IEEE JOURNAL ON SELECTEDAREAS IN COMMUNICATIONS, EURASIP Journal of Applied Signal Processing,EURASIP Journal on Wireless Communications and Networking, and the IEEESIGNAL PROCESSING MAGAZINE. He is the author of a research monograph ti-tled “Multiantenna Wireless Communication Systems.”
Ali H. Sayed (S’90–M’92–SM’99–F’01) receivedthe M.S. degree in electrical engineering from theUniversity of São Paulo, Brazil, in 1989 and thePh.D. degree in electrical engineering from StanfordUniversity, Stanford, CA, in 1992.He is Professor of Electrical Engineering with
the University of California, Los Angeles (UCLA),where he leads the Adaptive Systems Laboratory.He has published widely, in the areas of adaptationand learning, statistical signal processing, distributedprocessing, and bioinspired cognition. He is coau-
thor of the textbook Linear Estimation (Englewood Cliffs, NJ: Prentice-Hall,2000), of the research monograph Indefinite Quadratic Estimation and Control(Philadelphia, PA: SIAM, 1999), and co-editor of Fast Algorithms for Matriceswith Structure (Philadelphia, PA: SIAM, 1999). He is also the author of thetextbooks Fundamentals of Adaptive Filtering (Hoboken, NJ: Wiley, 2003)and Adaptive Filters (Hoboken, NJ: Wiley, 2008). He has contributed severalencyclopedia and handbook articles.Dr. Sayed has served on the Editorial Boards of several publications. He
has also served as the Editor-in-Chief of the IEEE TRANSACTIONS ON SIGNALPROCESSING from 2003 to 2005, and the EURASIP Journal on Advancesin Signal Processing from 2006 to 2007. He has served on the Publications(2003–2005), Awards (2005), and Conference Boards (2007-present) of theIEEE Signal Processing Society. He also served on the Board of Governors ofthe IEEE Signal Processing Society from 2007 to 2008 and as Vice Presidentof Publications of the same Society from 2009 to 2011. His work has receivedseveral recognitions, including the 1996 IEEE Donald G. Fink Award, the 2002Best Paper Award from the IEEE Signal Processing Society, the 2003 KuwaitPrize in Basic Sciences, the 2005 Terman Award, and the 2005 Young AuthorBest Paper Award from the IEEE Signal Processing Society. He has served asa 2005 Distinguished Lecturer of the IEEE Signal Processing Society and asGeneral Chairman of the IEEE International Conference on Acoustics, Speech,and Signal Processing (ICASSP) 2008.