Embed Size (px)
Citation preview

HAL Id: hal-01531516https://hal.inria.fr/hal-01531516
Submitted on 2 Jun 2017
HAL is a multi-disciplinary open accessarchive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come fromteaching and research institutions in France orabroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, estdestinée au dépôt et à la diffusion de documentsscientifiques de niveau recherche, publiés ou non,émanant des établissements d’enseignement et derecherche français ou étrangers, des laboratoirespublics ou privés.
Decision-making for automated vehicles at intersectionsadapting human-like behavior
Pierre de Beaucorps, Thomas Streubel, Anne Verroust-Blondet, FawziNashashibi, Benazouz Bradai, Paulo Resende
To cite this version:Pierre de Beaucorps, Thomas Streubel, Anne Verroust-Blondet, Fawzi Nashashibi, Benazouz Bradai,et al.. Decision-making for automated vehicles at intersections adapting human-like behavior. IV’17 -IEEE Intelligent Vehicles Symposium, IEEE, Jun 2017, Redondo Beach, United States. �hal-01531516�

Decision-making for automated vehicles at intersections
adapting human-like behavior
Pierre de Beaucorps∗ Thomas Streubel∗ Anne Verroust-Blondet∗ Fawzi Nashashibi∗
Benazouz Bradai† Paulo Resende†
Abstract
Learning from human driver’s strategies for solvingcomplex and potentially dangerous situations includ-ing interaction with other road users has the potentialto improve decision-making methods for automated ve-hicles. In this paper, we focus on simple unsignalizedintersections and roundabouts in presence of anothervehicle. We propose a human-like decision-making al-gorithm for these scenarios built up from human driversrecordings. The algorithm includes a risk assessmentto avoid collisions in the intersection area. Three roadtopologies with different interaction scenarios were pre-sented to human participants on a previously devel-oped simulation tool. The same scenarios have beenused to validate our decision-making process. The al-gorithm showed promising results with no collisions inall setups and the ability to successfully determine togo before or after another vehicle.
1 Introduction
While the development of automated vehicles advancesfurther, the focus in research moves towards more com-plex scenarios especially in urban traffic environments.Here, the high density of vehicles leads to numerousinteractions that challenge the cognitive abilities ofdrivers and the development of automated vehicle sys-tems alike.
The focus of this paper is the decision-making pro-cess for an automated vehicle at intersections androundabouts in the presence of other vehicles. Thisproblem is usually coupled with the introduction ofa behavior estimation approach for manually drivenvehicles as in [1]. The aim here is to investigate thehuman behavior in order to create a naturalistic deci-sion process. The high error rate of drivers leading toaccidents and casualties is a major argument for devel-oping automated vehicles. Thus, our decision processis combined with an objective risk assessment to avoidcollisions. However, the high adaptability and robustdecision-making process of drivers should not be ne-glected. Therefore, our approach incorporates humandriving behavior enhanced by a robust risk assessment.
∗INRIA Paris, 2 rue Simone Iff 75012 Paris,France {pierre.de-beaucorps, thomas.streubel,anne.verroust, fawzi.nashashibi}@inria.fr†Valeo Driving Assistance Research - 34 rue St-Andre 93012
Bobigny, France
We created a new multi-agent simulation environ-ment for testing and validating the decision-making al-gorithm design. It enables the simultaneous driving ofmultiple agents (human or automaton). Such a toolis essential for the investigation of the interaction be-tween human drivers and automated vehicles. It is alsoused for data acquisition that is required to tune thealgorithm. The key aspect of our work is the introduc-tion of a decision-making process capable of handlingintersection and roundabout scenarios avoiding colli-sions.
1.1 Related Work
Different decision-making problems for automateddriving have been recently tackled. Depending on thescenarios, some concentrate on lane-changing scenarios([2, 3, 4]) while others focus on intersections. The rele-vant features at intersections are different than in lanechange scenarios (see [5] for a survey). In [6], the post-encroachment time (PET) is mentioned as measurableparameter connected with risk in left turning scenarios.It refers to the area that is common to the paths of twovehicles coming from different directions. The PETis the time between one vehicle leaving and the othervehicle entering this zone. The study examined thedriving behavior in a real driving scenario created ona test field. The situational conditions varied betweencomfort and hurried and the aim was to investigate theaccepted comfort limits (expressed by PET and lateralacceleration) under both conditions. While in the com-fort situation the PET was around 2 seconds, the lowerlimit is slightly above 1 second for the hurried condi-tion. One of the challenges in such an experimentalsetup seems to be the realization of comparable situa-tions for all test drivers since the approaching behaviorat an intersection differs greatly between drivers.
Decision-making at intersections is addressed re-cently in [7] and [8]. Galceran et al. introduce amulti-policy approach, i.e. there is a previously defineddiscrete set of policies (maneuvers) estimated for vehi-cles including a Bayesian change-point detection wherethe intention of executing a certain maneuver switches.The maneuver set decreases the computation time infavor of a real-time application. The decision-makingis based on a reward function taking several safety andcomfort features into account and the optimal maneu-ver is found by forward simulation. Here, an interac-tion between vehicles on a maneuver level is taken into

account. The decision-making is similarly approachedin [8]. Although, the prediction is realized through aHidden Markov Model (HMM) to determine the driv-ing direction (left, right, straight) and the intention topass (stop, yield, no yield). Further, several policiesare created for the automated car and the observedvehicle by creating artificial speed profiles through dis-crete acceleration steps (step size 0.5 s) within a certaincomfort limit for deceleration and acceleration and tocomply with the speed limit. The prediction horizon ischosen very high with 8 seconds which is compensatedwith a wide step size. The decision of the best policy ismade using a reward function that takes comfort andsafety features into account. A potential conflict andthe traffic law compliance are both handled as binaryresulting in a high penalty for collision or breaking thelaw.
Driven speed profile extraction have been used re-cently for different purposes. This was used in [9] tomodel automated vehicle behavior by building a neuralnetwork that predicts the velocity declination in curvyroads and turns. In [10] a functional discretization ofspace for road intersection crossing has been designedconsidering speed profile extraction.
1.2 Concept
The process towards decision-making follows thescheme described in Figure 1. Concerning the envi-ronment perception, we suppose that the informa-tion is available and that sensing errors are neglected.The behavior estimation is realized by a simple ex-trapolation of the movement of other vehicles. Thetrajectory planning of the automated vehicle is splitinto two parts. First, the path planning is realizedby defining a route corridor formed by a list of cubicBezier curves maintaining G1 continuity. It is com-puted offline according to the road topology by an ex-ternal path planning module. Further, the trajectoryplanning is completed by assigning a speed profileto the path. Speed profiles are retrieved through testdrivers driving in our simulation environment to shapehuman-like behavior. This inherently assures a cer-tain comfort boundary for lateral acceleration. The
Trajectory planning
Path planning
Environment perception
Behavior estimation
Risk assessment
Speed profile
Decision making
Figure 1: Decision-making framework
trajectory planning and estimated trajectories of othervehicles are used for a situational risk assessment toavoid collisions in the intersection area. The risk is
determined by the PET and other safety-related vari-ables. The decision-making is finalized by choosingthe lowest risk or, in case of no risk, the time-optimalspeed profile available among the several speed profilesclustered from the retrieved driving data. So, this ap-proach combines natural speed profiles extracted fromthe human driving data recorded on our simulation tooland objective risk features to adapt the velocity of anautomated vehicle and avoid collision risks in the in-tersection.
This paper is organized as follows. In section 2, thesimulation tool is introduced, its functionality is de-scribed and the data acquisition is outlined in section3. Further, section 4 presents the decision-making al-gorithm. Finally, in section 5 the simulation results areshown and in section 6 the conclusion is drawn.
2 Simulation tool
For testing decision-making algorithms in automatedvehicles, a simulation tool is indispensable. Even on atest field, the risk of collision and damaging the equip-ment is too high. Since a simulator fitting all require-ments was unavailable, a new custom simulation toolwas created. In the following, we present its main char-acteristics.
2.1 Requirements
To deal with interactive behavior in urban traffic sce-narios, the following requirements were identified:
1. The simulator tool should be capable of processinghuman inputs in a controlled environment (driver-in-the-loop). This way different drivers can betested in the exact same scenarios. The inputsas well as the vehicle dynamics are recorded forfurther analysis.
2. New algorithms can be tested for objective (min-imal distance to the other vehicle, collision free)and subjective (risk score, driver acceptance) cri-teria, even in critical driving situations, which isnot easily feasible with a hardware platform.
3. Multiple vehicles with decision-making algorithmscan run against each other for validation or for it-erative learning approaches such as self-play rein-forcement learning.
Overall, a realistic, versatile, multi-agent and genericsimulator is required. Realistic refers to a reason-able physics model to generate vehicles executing ac-tually drivable trajectories. Versatile is meant mainlyin terms of road topology. The tool should allow acustomization of road designs (crossroads and round-abouts with different intersection angles, lane widths,traffic signs, etc.) to create new scenarios easily andquickly. For interaction, a multi-agent simulation al-lows to gather several human inputs in real time andplace them in the same virtual environment. This en-ables to study the process of human decision making

especially regarding the choice to go before or after an-other vehicle. The generic attribute refers to the abilityto run human inputs, recordings and automated vehi-cles in the same software at the same time.
2.2 Vehicle model
We adapted an implementation of the bullet physicsengine [11] in order to run the simulation on a serverwhich centralizes the physics computations for everyclient of the architecture. The vehicle is controlled bysetting three parameters: steering wheel angle, gas,and brake. The physical engine then calculates thenext state of the world according to the friction slipof the ground and the vehicle model [12]. The latterincludes four independent wheels with their suspen-sion systems and a body mass on top. It reproducespitch and bounce degrees of freedom for the powertraingiving realistic visual feedback to the human driverfor throttle changes. Each suspension system includesstiffness, compression, damping and maximum travel.
2.3 Visualization
An example of the 3D view of the simulation can beseen in Fig. 2. A special feature of the tool is to en-able a rapid integration of new road topologies in thescenario design. The visual representation of the envi-ronment is generated from a two-dimensional bird-viewimage, a description of traffic signs (type, position, ori-entation) and a list of available paths for vehicles. Amonitor mode enables to display the scene from a bird-view to watch the study, restart the scenario and assignpredefined paths to available human drivers.
Figure 2: left: bird view of the scene (monitor mode),right: driver view
2.4 Control Systems
The intention is to gather meaningful behavioral dataof human drivers decisions in complicated driving situ-ations. A detailed trace of trajectories is not required.For this reason and because it is more convenient forthe study, the vehicles are controlled only by a com-puter mouse. To keep trajectories and decisions realis-tic the two following controls are applied to assist thedriver.
2.4.1 Automatic Lateral Control
The driver is told to follow a route that is highlightedin the 3D view. As the only interaction regarding otherroad users is either pass or give way, there is no reasonto escape a predefined route corridor. As the steeringtask is neither required nor easy in this artificial en-vironment, an automatic lateral control helps to keepthe lane according to the predefined path. The humandriver is only required to set the speed of the vehicle.
2.4.2 Semi-Automatic Longitudinal Control
According to the above, the only remaining critical taskto define a driving behavior is to set the speed profile(i.e. the adjustment of the vehicle speed over time).The assistance for the longitudinal control acts like aCruise Control system; the user sets a target speed withthe mouse cursor, and the longitudinal control adjuststhe brake/gas ratio to reach it in a smooth, naturalway, as follows, K being defined empirically:
Acc = AccMax
(1−
(SpeedcurrentSpeedtarget
)3)
Acc > 0⇒ gas = Acc
Acc < 0⇒ brake = −K ·Acc
(1)
The speed is set regarding the height of the mousecursor: the higher the cursor, the greater the accel-eration. After several minutes in a test scenario, thedrivers seemed sufficiently accustomed to the simulateddriving task.
3 Data acquisition
The simulated environment is further used to gatherdata about human behavior in several simple inter-sections. The experiment is conducted with 10 par-ticipants, each one of them driving their vehicle (ego-vehicle) in 56 different setups involving interaction withan automated vehicle (dummy-vehicle).
3.1 Scenarios
For the current work, we focus on the following roadtopologies (cf. Figure 3):
• Two crossroads with four legs; the first one inwhich two opposing routes lead to a yield sign andthe second one without traffic signs except thosereminding to give priority to the right
• A roundabout with four exits and one inner lane,every incoming lane leading to a yield sign
Seven main scenarios are selected: six for the cross-roads and one for the roundabout. For the crossroad,we distinguish between the maneuver performed by theego-vehicle crossing the path of another vehicle (LeftTurn Across Path (LTAP), Right Turn Across Path

Figure 3: Available road topologies(RTAP), Straight Across Path (SAP)) and the direc-tion from which the other vehicle is coming (Left Di-rection (LD), Opposite Direction (OD), Right Direc-tion (RD)). In all cases the other vehicle has the prior-ity. Therefore, there are six scenarios for the crossroadtopology: three for Left Turn Across Path (LTAP/LD,LTAP/OD, LTAP/RD), two for Straight Across Path(SAP/LD, SAP/RD) and one for Right Turn AcrossPath (RTAP/LD). These scenarios are repeated withdifferent setups where the starting position and thecruise speed for the dummy-vehicle change, so the in-teraction between the two vehicles always varies.
3.2 The tracking algorithm
Since the human drivers do not have the same behaviorin the scene, they may enter the intersection with dif-ferent timings. As an attempt to standardize each sce-nario over every participant in the study, the dummy-vehicle is manipulated to reach a given position witha given speed when the ego-vehicle enters the intersec-tion. Therefore, a dedicated algorithm has been de-signed to perform a real-time tracking that shapes thespeed profile of the dummy-vehicle. Since interactionbetween the dummy-vehicle and drivers was the pri-mary target of this manipulation, risky situations werecreated where the human drivers do not always succeedto avoid a collision.
3.3 Procedure
All participants were in possession of a driver’s licenseand were familiar with driving a car. To get used tothe simulation environment, there was a test loop pre-sented first to gain experience with the controls of thevehicle for several minutes. The study includes 30minof driving through the 56 setups of the 7 scenarios,each of them being ended by a subjective risk assess-ment form. Neither any detail about the purpose of thestudy nor any specific instructions are given, except arequest to observe traffic rules and to drive as in a realenvironment. The simulator records all relevant infor-mation about all vehicles every 100ms. Their position,orientation, speed, acceleration (gas or brake applied)and steering angle are stored in a dedicated JSON file.
4 Algorithm design
The trajectory planning is divided into a predefinedpath computed offline and the variable speed profilethat determinates the behavior of the automated vehi-cle. The outcome of the decision-making process is an
Figure 4: The Post Encrochment Time (PET)
optimal speed to be reached by the control module ofthe automated vehicle. This target speed is updatedat each time step.
A set of reference speed profiles is determined of-fline, extracted from human data (cf. section 4.1). Thedecision-making process iterates over them to makea prediction and decides then to follow the referencespeed profile that fits the best to the present situation.
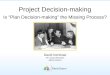
In this approach, the post-encroachment time (PET)is used as the objective risk feature. It corresponds tothe time difference between the first exit of the collisionzone and the last entrance in it (see Figure 4). As thepaths are predefined, the collision zone is approximatedby a rectangle in crossroads and a sector of an annulusin roundabouts.
4.1 The reference speed profiles
The reference speed profiles are established for theseven scenarios described in section 3.1. For a givenscenario, we consider the corresponding speed profilesgenerated by the users in the simulation tool. The aimis to identify the most common shapes of speed profilesand average them to create a group of reference speedprofiles. In order to compare different speed profilesgenerated by drivers, we define them with respect tothe curvilinear abscissa of the vehicle’s position whichis projected on the predefined path. Since the lateralcontrol of the vehicles ensures that the predefined pathis followed, this alignment of speed profiles is reason-ably accurate.
The generated speed profiles are divided into threegroups (ego vehicle first, other vehicle first, risky situ-ation) considering their PET values. The ego vehiclepassed first if PET > 0, and gave way to other ve-hicle if PET < 0. Cases considered too risky (colli-sions included) and situations with a high score on thedriver’s subjective risk (> 8 on a scale from 1 to 10) arediscarded. Further, a k-means clustering is performedfor the remaining two groups, giving a set of centroidsof speed profiles that average the observed behaviors(Figure 5-B). To apply the k-mean algorithm on se-quential data, every profile is considered a vector hav-ing one element per abscissa step (i.e. 1m step on thepredefined path). The recorded speed profiles rarely

Figure 5: A: Recorded speed profiles in crossroadLTAP/RD scenario. Only ”passing first” speed profiles(PET > 0) are considered. B: Three reference speedprofiles after clustering
Figure 6: A: The six reference speed profiles in cross-road LTAP/RD scenario (3 passing, 2 yielding, 1 stop-ping). B: The speed profiles candidates, adapted to thecurrent speed (red cross) with a control algorithm.
intersect over the abscissa, which enables the k-meanalgorithm to perform a good separation of the speedprofiles into clusters. On some scenarios, a first clus-tering builds singleton clusters with only one outsiderspeed profile inside. The outsider profiles are removedfrom data before performing a second clustering thatis better balanced.
The reference speed profiles (see Figure 6-A for anexample) consist of three speed profiles for entering theintersection fast (for situations where the ego vehiclepassed first safely), two speed profiles for entering theintersection slower (ego yield to other vehicle), and onespeed profile for stopping definitely before the intersec-tion at the stop line.
4.2 Short term prediction
When the automated vehicle AV approaches an inter-section while another vehicle veh2 is closing in froma different direction, a decision has to be made to gobefore or after veh2. For this purpose, a short termprediction is made at each time step (approx. 100ms),with a time horizon of 2s if the AV reaches the inter-section within this horizon. The prediction of the AVutilizes the reference speed profiles while the maneuverof veh2 is assumed to be predicted correctly and theposition on the path is an extrapolation with the cur-rent speed. About 30m before the intersection the AVenters the ”decision zone”, which is the region wherethe decision has to be made. The decision zone endsat the path of veh2.
To be adapted to any situation (i.e. to any driv-ing speed), the reference speed profiles (Fig. 6-A) areconsidered as a target for the control algorithm usedabove in the simulated environment (cf. equation 1).The control algorithm starts at the current speed andthen simulates the future longitudinal dynamics of thevehicle adapting to the given reference speed profile.The output gives actual executable speed profile can-didates (Fig. 6-B).
Based on the predicted motion of both vehicles, thePET is computed for each of the six speed profilescandidates and is provided to the decision-making algo-rithm. The prediction iterates over every speed profilecandidate for the automated vehicle, so different be-haviors are tested against the situation. The predictionstops when the vehicle AV exits the ”decision zone” andcrosses the path of veh2. After this point, the decisionprocess is set back to a default lane-following mode.
4.3 Decision-making
The decision-making process depends on the objectiverisk feature and the predicted speed of the vehicle. Es-timated trajectories leading to a |PET | below a criti-cal threshold are rejected for being too risky. After therisk evaluation, the speed profile with the highest in-stantaneous speed is selected from the remaining can-didates to contribute to time efficiency. In the caseswhere there is no appropriate candidate (i.e. emer-gency cases), the stopping speed profile is automati-cally selected. This leads either to a stop before cross-ing the path if possible or at least to a high reductionof speed. As previously mentioned, as soon as the pathof veh2 is entered the AV changes into a lane-followingmode since a stop in the path of the other vehicle isundesirable and potentially dangerous. Finally, the se-lected speed profile is sent to the control module.
5 Results
The algorithm is capable of passing the intersectionsafely. The driving strategy is reasonable and seems toreplicate human-like behavior to the extent that sucha property can be evaluated in the present simulatedenvironment. The results are also presented in a video

Figure 7: Number of collisions
provided in [13]. The following will focus on an objec-tive validation of our algorithm.
To enable an objective comparison, an automatedvehicle with the described algorithm is tested in thesame setups that were used to retrieve the speed pro-files. The validation setups have been grouped intothe seven scenarios described in 3.1. The ten humandrivers have been clustered into two groups of fivedrivers according to their averaged speed inside the in-tersection over all scenarios. The group of faster driversis called the ”daring human drivers” and the other isthe ”cautious human drivers” group. Besides these twogroups, the evaluation is performed with two versionsof the decision-making algorithm differing in the PETthreshold for taking a predicted speed profile into ac-count. The automated vehicles 1 and 2 ensure respec-tively |PET | > 1.5 and |PET | > 0.7, which leads totwo discriminable behaviors.
As presented before, the seven scenarios have eightvariants leading to 56 different setups. As it is nottrivial to condensate the complete course of a drivingsituation into one score, three features have been cho-sen for the evaluation of the driving performance.
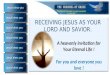
• The number of collisions (Fig. 7). In case of thetwo groups of human drivers, this value is dis-played with a min to max range referring to thecollisions of an individual driver of the group andthe mean indicator for the group.
• The number of daring situations, i.e. situationswhere the driver succeeded to pass before the othervehicle (Fig. 8). In case of the two groups ofhuman drivers, this value is again displayed witha min to max range referring to the numbers ofan individual driver of the group and the meanindicator for the group.
• The average speed (unless when stopped) insidethe intersection (Fig. 9). For each scenario, themean and standard deviation are computed overthe 8 different setups (and over the 5 drivers incase of a group).
In all scenarios, automated vehicles 1 and 2 passed ev-ery setup without colliding with the other vehicle (seeFig. 7). However, the dummy car was implementedto generate comparable setups that are risky. So, its
Figure 8: Number of situations where driver passedfirst
Figure 9: Average speed inside the intersection
behavior was highly artificial. This explains the highcollision rate for the human drivers in both groups.
The daring human driver group enters the intersec-tion first most frequently in average compared to thecautious human driver group (see Fig. 8). The only ex-ception is in the roundabout scenario where the meanvalues are the same for both groups. The automatedvehicles act more conservative to prevent collisions.While automated vehicle 2 with a higher risk accep-tance is passing first multiple times in several scenar-ios, the automated vehicle 1 is almost always yieldingto the incoming dummy vehicle. So, AV 2 is compara-ble with the human drivers in terms of using the oppor-tunity to pass first and is often between both humandriver groups. In the SAP-LD scenario, AV 2 managesto pass first even more often than the daring humandriver group in average. Here, the human drivers seemto miss some opportunities to pass before the incomingvehicle. In roundabouts both AVs are rather conserva-tive and pass only once in all the setups.
6 Conclusion
We presented a human-like decision-making algorithmfor simple unsignalized intersections in presence of an-other vehicle. A dedicated simulation tool was used torecord human speed profiles in especially risky situa-tions where a conflict can arise if the driver dares topass before the other vehicle. The aggregated data hasbeen used to design an algorithm that enables human-like speed profile generation while ensuring safety withobjective risk assessment. The post-encroachment time(PET) appeared to be a useful feature to estimate riskat unsignalized intersections. Therefore, it was used in

a short-term prediction that successfully avoided colli-sions in every tested scenario. The results show thatour approach can handle standard intersection scenar-ios with another car approaching from a different direc-tion without collisions. This is not only realizable byjust avoiding the conflict at all and yielding in almostevery setup (compare AV 1) but also by accepting somelevel of risk and passing first if it is possible (compareAV 2). This combines some level of human-like dar-ing behavior with the objective risk evaluation of anautomated system.
Work in progress extends this approach to more com-plex scenarios, especially with generic road topologiesand more road users interacting simultaneously. A newmethod of validation is also investigated to estimatethe acceptance of the automated vehicle behavior byhuman drivers in the scene.
References
[1] T. Streubel, “Situation Assessment at Intersec-tions for Driver Assistance and Automated VehicleControl,” Dissertation, TU Chemnitz, 2016.
[2] M. Bahram, A. Wolf, M. Aeberhard, and D. Woll-herr, “A prediction-based reactive driving strat-egy for highly automated driving function on free-ways,” in Proc. of IEEE Intelligent Vehicles Sym-posium, 2014, pp. 400–406.
[3] J. Wei and J. M. Dolan, “A robust autonomousfreeway driving algorithm,” in Proc. of IEEE In-telligent Vehicles Symposium, 2009, pp. 1015–1020.
[4] J. Nilsson and J. Sjoberg, “Strategic decision mak-ing for automated driving on two-lane, one wayroads using model predictive control,” in Proc. ofIEEE Intelligent Vehicles Symposium, 2013, pp.1253–1258.
[5] M. S. Shirazi and B. T. Morris, “Looking at in-tersections: A survey of intersection monitoring,behavior and safety analysis of recent studies,”IEEE Transactions on Intelligent TransportationSystems, no. 99, pp. 1–21, 2016.
[6] J. Bargman, K. Smith, and J. Werneke, “Quanti-fying drivers’ comfort-zone and dread-zone bound-aries in left turn across path/opposite direction(LTAP/OD) scenarios,” Transportation ResearchPart F: Traffic Psychology and Behaviour, vol. 35,pp. 170–184, 2015.
[7] E. Galceran, A. G. Cunningham, R. M. Eustice,and E. Olson, “Multipolicy Decision-Making forAutonomous Driving via Changepoint-based Be-havior Prediction,” Robotics: Science and Sys-tems, 2015.
[8] W. Song, G. Xiong, and H. Chen, “Intention-Aware Autonomous Driving Decision-Making
in an Uncontrolled Intersection,” MathematicalProblems in Engineering, 2016.
[9] X. Geng, H. Liang, H. Xu, B. Yu, and M. Zhu,“Human-driver speed profile modeling for au-tonomous vehicle’s velocity strategy on curvypaths,” in Proc. of IEEE Intelligent Vehicles Sym-posium, June 2016, pp. 755–760.
[10] M. Barbier, C. Laugier, O. Simonin, andJ. Ibanez-Guzman, “Functional Discretization ofSpace Using Gaussian Processes for Road Inter-section,” in 2016 IEEE 19th International Confer-ence on Intelligent Transportation Systems (ITSC2016), Rio de Janeiro, Brazil, Nov. 2016, p. 7.
[11] “Bullet physics engine,” http://bulletphysics.org.
[12] “Documentation about the raycast vehicle modelin the bullet physics engine,” http://tinyurl.com/ydfb71m.
[13] “Video demonstrating our approach running in in-tersection,” https://team.inria.fr/rits/membres/pierre-de-beaucorps/demo-iv2017.