Embed Size (px)
Citation preview

Delay-Stability of Power Control in
Wireless Networks
BENJAMIN C. HEINRICH
Master’s Degree Project
Stockholm, Sweden May 2011
XR-EE-RT 2011:012


Abstract
In this thesis, we investigate the stability of uplink power control algorithms in wireless
networks. We derive an abstract block-diagram model of the power-control loop similar
to the model in [6]. The power control loop regulates the energy output of the mobile
devices based on measurements of the incoming signal strengths, background noise and
interference. The goal of the implemented algorithm is to maintain a certain Signal-to-
Interference Ratio (SIR) for all users.
Our analysis is done locally by linearizing the system around a steady state. There,
we can use a system-specific multivariate Nyquist criterion to analyze stability. In this
framework, we also find bounds on the rate of convergence as a performance measure.
A focus in this work lies on the influence of time delays and how one can compensate
for them. Consequently, we investigate Time-Delay Compensation (TDC, see [6]) and find
an extended version of it.
We also extend our model to incorporate binary control feedback to match the real-
world system. The emerging oscillatory behavior is then predicted and investigated by
multivariate describing-function methods.
The work is concluded by evaluating our findings with simulations using a Mat-
lab/Simulink model.
i

ii

Acknowledgments
I guess this work involved the most persons a Master’s thesis has ever involved. Conse-
quently, there is a huge number of people I would like to thank. Furthermore, I want to
apologize to all the people I did forget in this section.
First of all, I want to thank my parents and grandparents for making my stay in Sweden
possible with their generous support - amongst others monetarily. Also, I would like to
thank ERASMUS for supporting me within their possibilities. For being very patient with
my various requests and supporting my non-standard exchange, I want to thank Simone
Schuler and Manja Schubert, the exchange coordinators of their respective institutes at the
University of Stuttgart and the KTH. The former was recently replaced by Georg Seyboth;
thanks for managing the remainder of the exchange bureaucracy. Mr. Seyboth has also
taken over the role of my exchange supervisor for Stuttgart since Marcus Reble, who was
originally supposed to do that, left Stuttgart during my thesis. This brings me to my
examiner at KTH, Stockholm: Professor Elling Jacobsen. A special thanks to you sir, for
spontaneously filling in for Professor Mikael Johansson, who originally agreed on being my
examiner, but was not reachable when I arrived in Stockholm. In addition to an examiner,
I had two supervisor. Now, why is that? Officially, I did my exchange with the department
of Electrical Engineering (EE), but my work as actually made and supervised at the math
department, Institute for Optimization and Systems Theory.
Hence, I would like to thank the two people who dedicated a lot of their time - especially
in the last months - to supervising me, discussing with me and correcting my many many
drafts. A huge shoutout for Professor Ulf Jonsson for sharing his mathematical insight
iii

iv
with me. Thanks for all those valuable suggestions along the way. Last, but certainly not
least, I want to thank Anders Moller who single-handedly supervised the last 20% of the
work and 50% of the writing. Thank you for all those hours of discussion and being so
picky about every line I wrote and also doubting every line I calculated. This is meant
absolutely positively! You really contributed to quality of this thesis.
In memory of
Ulf Jonsson

Contents
1 Introduction 1
1.1 Wireless networks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Framework . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.1 Cell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.2 Channel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2.3 Attenuations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3.1 Time Shift and Z Transform . . . . . . . . . . . . . . . . . . . . . . 6
1.3.2 Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3.3 List of Abbreviations . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3.4 List of used Symbols . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Modeling 11
2.1 Controller Objective . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1.1 Signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.1.2 Interference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.1.3 Auto-Interference . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.1.4 Signal-to-Interference Ratio . . . . . . . . . . . . . . . . . . . . . . 14
2.2 Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.1 One-Mobile Case . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.2 Multiple-Mobile Case . . . . . . . . . . . . . . . . . . . . . . . . . . 16
v

vi Contents
2.2.3 Delay Case . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2.4 Complete Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2.5 Rearranging the Block Diagram . . . . . . . . . . . . . . . . . . . . 17
2.3 Transfer Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3.1 Transfer Function of our Block Diagram . . . . . . . . . . . . . . . 20
2.3.2 Block implementations . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3 Steady-State Analysis 25
3.1 Computing the Steady State . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2 Feasibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.3 Linearization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.4 Connection between the Linearized Interference and Feasibility Matrix . . 31
3.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4 Nyquist Analysis 33
4.1 Preliminaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.1.1 One-Dimensional Nyquist Criterion . . . . . . . . . . . . . . . . . . 36
4.1.2 Multi-Dimensional Nyquist Criterion . . . . . . . . . . . . . . . . . 37
4.2 Analytical Usage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.2.1 General Derivation . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.2.2 Problem-Specific Usage . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.3 Application . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5 Rate of Convergence 47
5.1 Scaling in the Time Domain . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.2 Scaling in the Frequency Domain . . . . . . . . . . . . . . . . . . . . . . . 49
5.3 Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52

Contents vii
6 Time-Delay Compensation 53
6.1 Idea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
6.2 Block Diagram and Transfer Function . . . . . . . . . . . . . . . . . . . . . 54
6.3 Extension . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
6.4 Investigation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
6.4.1 Traditional TDC . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
6.4.2 Extended TDC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
6.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
7 Describing Functions 67
7.1 Idea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
7.2 Problem Specific Usage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
7.3 Investigation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
7.4 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
8 Simulations 79
8.1 Influence of the Gain Matrix . . . . . . . . . . . . . . . . . . . . . . . . . . 79
8.2 Influence of the Dynamics Matrix . . . . . . . . . . . . . . . . . . . . . . . 83
8.2.1 Changing the Integrator Gain . . . . . . . . . . . . . . . . . . . . . 84
8.2.2 Changing the Overall Delay . . . . . . . . . . . . . . . . . . . . . . 86
8.2.3 Adding a Proportional Part . . . . . . . . . . . . . . . . . . . . . . 88
8.2.4 Adding Filters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
8.2.5 An Interesting Observation . . . . . . . . . . . . . . . . . . . . . . . 91
8.3 Influence of Time-Delay Compensation . . . . . . . . . . . . . . . . . . . . 92
8.3.1 Under- and Overcompensating the Delay . . . . . . . . . . . . . . . 92
8.3.2 Under- and Overestimating the Gain . . . . . . . . . . . . . . . . . 94
8.3.3 Rule of Thumb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
8.4 Influence of Binary Feedback . . . . . . . . . . . . . . . . . . . . . . . . . . 97
8.5 Influence of Varying the Gain Matrix . . . . . . . . . . . . . . . . . . . . . 99

viii Contents
8.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
9 Conclusions 105
9.1 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
9.2 Possible Extensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Bibliography 110

List of Figures
1.1 Typical Depiction of a Cellular Wireless Network . . . . . . . . . . . . . . 3
1.2 Definition of the Channel . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1 Toy Network . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2 Step-by-Step Derivation of our Block Diagram (pt.1) . . . . . . . . . . . . 16
2.3 Step-by-Step Derivation of our Block Diagram (pt.2) . . . . . . . . . . . . 18
2.4 Rearranged Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.5 Simplified Rearranged Block Diagram . . . . . . . . . . . . . . . . . . . . . 20
3.1 Simplified Rearranged and Linearized Block Diagram . . . . . . . . . . . . 30
4.1 Standard Loop Layouts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.2 Nyquist Contour . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.3 Stability Region of the Dynamics Matrix . . . . . . . . . . . . . . . . . . . 41
4.4 Stability Investigation of G1 under DPC Control . . . . . . . . . . . . . . . 42
4.5 Stability Investigation of G1 with System h1 . . . . . . . . . . . . . . . . . 43
4.6 Stability Investigation of the Infeasible Network G2 . . . . . . . . . . . . . 44
4.7 Time-Domain Plots of the Considered Examples . . . . . . . . . . . . . . . 44
5.1 Stability Region of the Scaled Dynamics Matrix hI for δ from 2–6 . . . . . 50
5.2 Rates of Convergence for Integral Control of G1 . . . . . . . . . . . . . . . 51
5.3 Time-Domain Plot of Figure 5.2c and 5.2d . . . . . . . . . . . . . . . . . . 52
6.1 Block Diagram with Additional Feedback Paths to Cancel Delays . . . . . 55
ix

x List of Figures
6.2 The Base Station’s TDC Controller . . . . . . . . . . . . . . . . . . . . . . 56
6.3 Reduced Block Diagram of the Time-Delay-Compensated System . . . . . 57
6.4 Stability Region of the BS-TDC Dynamics Matrix . . . . . . . . . . . . . . 59
6.5 Stability Region of the Under-/Overcompensated BS-TDC Dynamics Matrix 60
6.6 Stability Region of the under-/overcompensated extended TDC Dynamics
Matrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
7.1 Split System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
7.2 Block Diagram with Binary Control . . . . . . . . . . . . . . . . . . . . . . 70
7.3 Check of Low-Pass Behavior of g . . . . . . . . . . . . . . . . . . . . . . . 71
7.4 Motivation for Introducing ε . . . . . . . . . . . . . . . . . . . . . . . . . . 71
7.5 Test of Rule of Thumb 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
7.6 Time-Domain Plots of System with Binary Feedback . . . . . . . . . . . . 76
8.1 Feasible Reciprocal Eigenvalues of Γ†Fi . . . . . . . . . . . . . . . . . . . . 82
8.2 Investigation of Increasing Integrator Gain κI . . . . . . . . . . . . . . . . 84
8.3 Time-Domain Plot of Figure 8.2c . . . . . . . . . . . . . . . . . . . . . . . 85
8.4 Investigation of Increasing Overall Delay δ . . . . . . . . . . . . . . . . . . 86
8.5 Time-Domain Plot of Figure 8.4c . . . . . . . . . . . . . . . . . . . . . . . 87
8.6 Investigation of Additional Proportional Part κP . . . . . . . . . . . . . . . 88
8.7 Time-Domain Plot of Figure 8.6c . . . . . . . . . . . . . . . . . . . . . . . 89
8.8 Investigation of the Influence of Filtering . . . . . . . . . . . . . . . . . . . 90
8.9 Nyquist plot of Under and Overcompensation by TDC . . . . . . . . . . . 93
8.10 Time-Domain Plot of Figure 8.11f . . . . . . . . . . . . . . . . . . . . . . . 94
8.11 Nyquist plot of Under and Overestimation by TDC . . . . . . . . . . . . . 95
8.12 Additional TDC examples . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
8.13 Information versus Binary Feedback . . . . . . . . . . . . . . . . . . . . . . 98
8.14 Investigating TDC for a Changing Gain Matrix (low delay) . . . . . . . . . 100
8.15 Investigating TDC for a Changing Gain Matrix (high delay) . . . . . . . . 101
8.16 Investigating Binary Feedback for a Changing Gain Matrix . . . . . . . . . 102

List of Tables
1.1 Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2 Abbreviations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3 Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1 Transfer functions of typical implementations of system components . . . . 22
8.1 Comparison between the Approximated and the Actual Feasibility Region . 81
8.2 Maximal κI for different Systems . . . . . . . . . . . . . . . . . . . . . . . 91
xi

xii List of Tables

Chapter 1
Introduction
This Diploma Thesis discusses the stability and performance of power control in wireless
networks. A special focus lies on the influence of delays, which virtually always occur in
these systems. The point of origin for this work was Fredrik Gunnarsson’s PhD thesis on
the power control in cellular radio systems [6]. Our results are presented in a manner such
that readers from different backgrounds should be able to follow.
The investigated system is introduced in Chapter 1. First, we give a rough overview of
key features of wireless communication networks and then clarify special terminology. The
last section comments on the notation we use throughout this thesis. Chapter 2 covers
the modeling of the introduced system. The main result of the second chapter will be the
system’s transfer function, which is derived via log-linear block diagrams. The following
chapters – Chapter 3 to 5 – treat the analysis of the linearized system. This includes
finding the linearization and investigating its stability as well as its rate of convergence,
both utilizing Nyquist’s criterion. In Chapter 6 we take a look into the so-called Time-Delay
Compensation (TDC) to assess its applicability. We compare two different compensators
and discuss their respective advantages and disadvantages. In the 7th chapter, we will
then expand our model to have binary feedback, which is indeed the case in the real-world
system. Harmonic-balance techniques will be used to predict the amplitude and period
length of the emerging steady-state oscillations. Chapter 8 is intended to give insight into
the system’s dynamics as well as to back up our earlier investigations, both by simulation.
1

2 1 Introduction
We wrap up our results in the final 9th chapter. There, we also discuss the contributions
and possible extensions of this work.
1.1 Wireless networks
In the information age, there are two things which are most important: being informed
and being so whenever, wherever. The only means to achieve this goal to date are wireless
communication networks. The term ‘wireless communication networks’ encompasses a
variety of networks, ranging from short distance Bluetooth interconnections to long distance
WiMax networks, and from two participants to hundreds.
This work will focus on the well-established Third Generation (3G) Network. Although
the fourth generation is already on its way, the 3G system will still play a huge role in
this decade. The reason for this is that its infrastructure is prevalent and thus means
of enhancing the performance of the existing hardware are in demand. Note that other
wireless networks are also covered to a certain extent due to the similarities between all
types of wireless communication.
In the upcoming sections, we will elaborate on the considered framework and the ter-
minology used in this thesis in order to circumvent ambiguities. At the end of this chapter,
a legend of our notation will be given.
1.2 Framework
In the framework of this thesis, wireless communication connects base stations (BS) and
mobile stations (MS). The latter are in most cases mobile phones. One BS provides for a
number of associated MS:s in its so-called cell, see Section 1.2.1. In most wireless networks,
communication is bilateral, i.e. both the BS and the MS:s are transmitters as well as
receivers. The signal’s passage between transmitter and receiver – sometimes including
their respective antennas – is the so-called channel, which is treated in the homonymous

1.2 Framework 3
Section 1.2.2. The channel, however, is prone to diverse disturbances. A short introduction
on our disturbance modeling is given in Section 1.2.3.
1.2.1 Cell
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
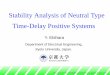
Figure 1.1: Typical Depiction of a Cellular Wireless Network
Hexaeder are traditionally used to depict network cells although they can be found in every size and shape.Each cell consists of one base station (BS), depicted as e, and a number of mobiles (MS), depicted asdots. Note, though, that especially when near a border of a cell, a MS might receive signals from multipleBS.
Due to their limited range and capacities, BS:s have only a limited effective area of
service. This area is called a cell. Cells vary strongly in size and form, dependent on the
expected density of users and geographic conditions. They are, nevertheless, often depicted
as homogeneous hexaeders (see Figure 1.1).
A mobile is assigned to a cell, and consequently to a base station. Ideally, a MS
interacts only with its associated BS. In reality, however, there is a number of phenomena
one has to consider. On the one hand, there will be interference among the users sharing
the cell’s frequency band; and not only amongst those, but also cross-cell interference when
frequency reuse has to be considered. On the other hand, MS:s are by their very nature
mobile, i.e. they will most likely not stay in one cell but traverse from one to another.
When in between two or more cells, multiple connections will occur. In order to provide
continuous connectivity in such cases, means of handing over an MS from one BS to another

4 1 Introduction
have to be considered. Note, though, that hand overs are not considered in this thesis.
Furthermore, we will soon go from a cell point of view to a channel point of view. The
channel is the topic of the next section.
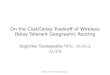
1.2.2 Channel
signal Encoding Modulation Physical Propagation Demodulation Decodingperceivedsignal
Attenuation and Interference
Transmitter Receiver
Channel
Figure 1.2: Definition of the Channel
In this thesis, the Channel comprises everything that happens between sending the signal and perceivingit. This includes the dynamics of the en-/decoding and modulation. In particular, it includes the radiowave phenomena such as attenuation and interference.
We call the complete signal path from the transmitter to the receiver the channel.
The communication medium is air, or, to be more precise, an electro-magnetic carrier
wave transmitted through it. The carrier wave is superposed by the digitally-encoded ac-
tual signal. Typically, the carrier wave is within the Ultra High Frequency (UHF) Band,
i.e. between 300 and 3000 MHz. This bandwidth allows for high data-transmission capac-
ities while weather effects (moisture, rain) are only slight. Unfortunately, mountains and
buildings shield and reflect those radio waves. [6]
We can differentiate between the downlink channel – from BS to MS – and the uplink
channel – vice versa. It is much easier to decouple the downlink signals, i.e. make them
orthogonal in the signal-space, because they originate from a single source. In contrast,
the uplink signals are almost impossible to decouple, especially when considering mobiles
traversing between cells and being connected to two or more BS at the same time. For this
reason, the uplink channel is of special interest for this work. Next, we discuss the channel
attenuation in some detail.

1.3 Notation 5
1.2.3 Attenuations
The channel is cumbered by various wave propagation phenomena. We use the term
attenuation for all channel distortions which do not originate from other signals. This
section follows along the lines of Section 3.3 of [6].
One of the main phenomena of wave propagation is the signal loss due to the distance
between the transmitter and the receiver. It is often modeled as a factor inverse propor-
tional to the distance r to the power of some constant a. The factor a was in early studies
said to be four, while later investigations assume it to be somewhere between two and five,
dependent on topography. Naturally, open spaces correspond to less attenuation, and thus
smaller a, while urban regions hold greater a.
Another important attenuation happens due to shielding by the environment. In con-
trast to the path loss, this effect can lead to fast drops in the channel quality even though
the MS moves slowly. Analogous to the phenomenon when stepping from the light into a
shadow and back, this is called shadowing.
The last phenomenon we want to cover in this section is the so-called multi-path fading.
It occurs when the signal from transmitter to receiver traverses different paths due to
reflections from the environment. As a result of the different path lengths positive or
negative interference can occur at the receiver.
Both shadowing and fading are correlated to the movement of the MS as well as to the
movement of the environment. In this work, we will model all mentioned effects in one
single attenuation factor, see Chapter 2.
1.3 Notation
In this section, we do not only list the used symbols and conventions, but especially want
to point out the subtle difference between describing delays with the z transform and
the time-shift operator q. Although, from a practical point of view, they might be used
interchangeably, one has to stress the difference in order to be rigorous.

6 1 Introduction
1.3.1 Time Shift and Z Transform
We will frequently use two different notations for time delays. The first notation z−n, where
n is the number of samples delay, directly originates from the well-established z trans-
form [1]. Consequently, this is a time-discrete frequency-domain notation and works well
in the framework of time-discrete transfer functions.
The second notation involves the so-called time-shift operator q. This notation is fairly
common in the communication literature [6, 7, 13]. The time-shift operator is defined in
the time domain. We will illustrate its application with the help of a simple example.
Consider the following time-dependent function
f(t) = a(t) + b(t− 1)− c(t− 2),
where a, b and c are arbitrary chosen time dependent functions. Utilizing q yields
f(t) = a(t) + q−1b(t)− q−2c(t).
Accordingly, one can shift the time n steps by employing qn, where a negative n corresponds
to back-shifting while a positive n, naturally, corresponds to a forward shift. With the help
of q we can thus depict time-discrete algorithms like transfer functions. Consider e.g. a
time-discrete Euler-backward integrator
y(t) = y(t− 1) + u(t).
Rewritten with the time-shift operator q it reads:
y = q−1y + u
=q
q − 1u,
which maps directly to the z-transform of an integrator Z(y) = zz−1
Z(u).[1]

1.3 Notation 7
1.3.2 Conventions
The notation in the mathematical formulas of this work employs the conventions from
Table 1.1. Note especially the use of overlined symbols for variables measured in linear
scale in contrast to normal symbols, which are measured in dB.
Table 1.1: Conventions
Font Description
normal symbol measured in logarithmic scale
overlined symbol measured in linear scalebold letters vector (n× 1)
Capital Letters matrix (n×m)vector[i], Matrix[i,j] entry at ith row, jth columnCAPITAL old letters transfer functions/operator (MIMO)
old letters transfer functions/operator (SISO)
1.3.3 List of Abbreviations
The following more or less common abbreviations are used throughout this thesis.
Table 1.2: Abbreviations
Abbreviation Description
3G Third GenerationBS Base StationDPC Distributed Power ControlLTI Linear Time-Invariant
MIMO Multiple-Input Multiple-OutputMS Mobile StationSIR Signal-to-Interference RatioSISO Single-Input Single-OutputUHF Ultra High Frequency

8 1 Introduction
1.3.4 List of used Symbols
Here, we list all used symbols. Note that linear and logarithmic versions are not shown
explicitly.
Table 1.3: Notation
Symbol Description
α, α auto-interference
γ, γ Signal-to-Interference Ratio
γ†, γ† target Signal-to-Interference Ratio
ㆆ, ㆆ new target Signal-to-Interference Ratio (γ† + F−1ι ζ)
δ number of samples delay (often: total,i.e. δb + δm + 2δp)
δb number of samples delay in the base station
δm number of samples delay in the mobile station
δp number of samples propagational delay
δTDC number of samples delay compensated for with TDC (δm + 2δp)
δ∗TDC number of samples delay compensated for with extended TDC (δb+δm+
2δp)
δε number of samples error in the TDC
δ∗ε number of samples error in the extended TDC
ζ, ζ channel attenuation
ι, ι interference signal
. . . continued on next page

1.3 Notation 9
Table 1.3 – continued from previous page
Symbol Description
κ controller parameter
κI controller parameter, integrator gain
κP controller parameter, proportional part
λ an eigenvalue
λ(·) the eigenvalues of ‘·’
σ, σ noise term
ς, ς usable signal
φ filter parameter
Φ(·(z)) counter-clockwise phase rotation of ‘·’ about the origin when z counter-
clockwise traverses the unit circle
Γ attenuated Signal-to-Interference matrix
B, b base-station-controller transfer function
D, d delay transfer function
F, f filter transfer function
G, g generic transfer function
G0, g0 open-loop transfer function
H, h pooled lower-loop transfer function, also: dynamics function
K, k controller transfer function
M,m mobile-station-controller transfer function
F, f feasibility gain matrix
. . . continued on next page

10 1 Introduction
Table 1.3 – continued from previous page
Symbol Description
G, g gain matrix
I identity matrix
p, p output power of the mobile stations
pss, pss output power of the mobile stations in steady state
Γ†F feasibility matrix
I,∇I interference function, linearized interference function

Chapter 2
Modeling
We will begin the modeling of the uplink power control of the 3G network by defining a
quality measure for radio-based communication networks and thus our controller reference.
Taking this as our point of departure, we will derive a block diagram of our system, step-
by-step, going from a simplistic one-mobile case to a full block diagram with various delays.
Finally, this block diagram will be used to deduce the transfer function of the considered
wireless network. The block diagrams and transfer functions will aid in the investigation
of the performance of different networks and controller designs throughout this work.
2.1 Controller Objective
In order to model our system, we, first of all, define a controller objective. In the case
of wireless networks the main objective is to provide a certain quality of service. Here,
it is most convenient to measure this reference in terms of the well-established Signal-to-
Interference Ratio, short SIR. It is frequently defined in the literature, see e.g. [14]; we
begin our definition as follows:
11

12 2 Modeling
Definition 1 (Signal-to-Interference Ratio). The SIR for mobile i is defined as
γi∆=
signaliinterferencei
∆=ςiιi
or γi∆= signali − interferencei
∆= ςi − ιi,
dependent on whether we measure in [mW ] (linear) or [dB] (logarithmic).
Moving on, we define the signal ς and the interference ι in more detail.
2.1.1 Signal
First, let us have a look at the signal ςr picked up at receiver r. It is generated by a mobile i
with power output pi. We assume the signal strength to be directly proportional to this
power output. The sent signal, however, will never entirely reach the target receiver r.
Consequently, we multiply it by a factor gri ∈ [0, 1], the transmission gain. This gain
– or attenuation, as it is always less than one – includes effects such as shadowing and
multi-path fading amongst others, which were discussed in Section 1.2.3. The model for
the signal follows as
ςr∆= gripi or ςr
∆= gri + pi,
again, dependent on whether we measure in linear or in logarithmic scale.
2.1.2 Interference
Our interference model consists of three parts. First, we have the interference from other
users; it occurs due to unorthogonal transmission from other mobiles j affecting the re-
ceiver r and is modeled as a factor grj ∈ [0, 1] times the interfering transmission power pj .
Second, we have background noise which is modeled by the additive noise term σr.
For notational convenience, we introduce the following convention: The target receiver r
of mobile i is also called receiver i. Thus, we go from a transmitter-receiver point of view
to a channel point of view. Note that in this framework we cannot explicitly see which

2.1 Controller Objective 13
physical BS a MS is connected to; what we very well can differentiate are the different
channels at one base station. We can thus tackle in- as well as inter-cell interference very
conveniently.
Using the above convention, we introduce the so-called gain matrix G[ij] = gij , where the
diagonal elements are the channel-gains while the off-diagonal elements are cross-channel
gains. In an ideal case, where there is no interference and no channel attenuation, the gain
matrix would thus be the identity matrix. This matrix is naturally time-dependent since
the connectivity of the mobiles changes with time. However, we will in most parts of this
work consider the gain matrix fixed in the time scale of the analysis. Figure 2.1 represents
a small toy network with two mobiles and two BS. We want to stress that those ‘Base
Stations’ may in fact be different channels of the same physical BS.
The interfering signal ιi at BS i is given by the non-linear interference function Ii,
which is, making use of the above, defined as
Ii∆= 10 log10(Ii), where Ii
∆= σi +
∑
j 6=i
gij pj .
Here, i, j ∈ {1, . . . , n} and n is the number of mobiles.
e e
H H
g11
g21 g12
g22
Figure 2.1: Toy Network
Here, two base stations (e) and two mobile phones (H) are depicted. The channel gains are given by g11and g22. The cross-channel gains, which depict the strength of the interference, are given by g12 and g21.

14 2 Modeling
2.1.3 Auto-Interference
A further source of interference can actually be the sent signal itself. This so-called auto-
interference is the third part of our interference modeling and happens when the receiver
cannot pick up the entire signal. The unused part of the signal then effectively acts as
additional noise. In order to model auto-interference, we hence add another term αigiipi to
the interference part. Here, 0 ≤ αi < 1 is the positive auto-interference factor. Moreover,
the interfering part of the signal has to be subtracted from ςi. Considering both terms, we
get the overall signal and interference as
ςi∆= (1− αi)giipi and (2.1)
Ii∆= σi + αigiipi +
∑
j 6=i
gij pj (2.2)
2.1.4 Signal-to-Interference Ratio
Plugging the above discussed model for the signal (2.1) and the interference (2.2) into
Definition 1 yields
γi =(1− αi)giipi
σi + αigiipi +∑
j 6=i gij pjor (2.3)
γi = gii + pi + 10 log10(1− αi)− 10 log10(σi + αigiipi +∑
j 6=i
gij pj), (2.4)
where, again, i, j ∈ {1, . . . , n} and n is the number of mobiles. Keep in mind that overlined
symbols are linearly measured values while non-overlined are values measured in logarith-
mic scale. Having defined the objective for our system, we move on to the derivation of its
block diagram.

2.2 Block Diagram 15
2.2 Block Diagram
Block diagrams can give valuable insight into systems dynamics. One of their many ad-
vantages is that one does not have to model each part of the system in every detail, but
instead uses abstract blocks, which can be defined in more detail later. Consequently, block
diagrams provide a convenient framework to derive general transfer functions for a whole
class of systems.
In our class of systems, radio-based networks, measurements are predominantly done
in dB; it is therefore natural to build up a block-diagram model of the system using these
logarithmically-scaled signals. The main advantage of doing so is that we get a linear
relation for the SIR which allow for easier analysis.
Note that block diagrams are most commonly used in the frequency domain, where
every block depicts a transfer function. They, however, do also work as a description
of a control algorithm in the time domain when utilizing the time-shift operator q, see
Section 1.3.1. In this section, we will solely use the time-domain interpretation, as it is
predominantly used in communications literature.
2.2.1 One-Mobile Case
We begin the derivation of the block diagram by looking at the simple one-mobile case,
which is illustrated in Figure 2.2a. It occurs when there is only one mobile in the considered
network or if we model the disturbances from other mobiles solely as noise. The latter might
be appropriate for a very large number of mobiles interfering with each other.
The controller within the base station b compares a target SIR γ† to the actual SIR γ.
The Signal-to-Interference Ratio in logarithmic scale is just the difference between the
signal ς and the interference ι. The difference between γ† and γ is then used as the
logarithmic control error e, which is used to compute the output u of the BS’ controller b;
the output is subsequently transmitted to the mobile m, which adjusts its power output p
accordingly. The power output is then fed back, impaired by the channel gain g, and
together with ι determines the next γ and thus the next e.

16 2 Modeling
Note that we split the SIR into two parts. The lower feedback path contains the damped
signal (ς = p+ g) while the upper path involves the interference ι. In this special case, the
latter is pure noise σ.
b mγ†
g
σ
e u p
ς
−
ι
(a) One-mobile case
I
B Mγ†
ζ
σ
e u p
ι
ς
−
(b) Multiple-mobiles case
Figure 2.2: Step-by-Step Derivation of our Block Diagram (pt.1)
(2.2a) The controller in the BS b compares the target SIR γ† to the actual SIR (γ = ς − ι), which is splitinto the an upper noise path (ι = σ) and a lower signal path (ς = p+ g), resulting in the control error e.The computed control signal u is sent to the mobile m, which has the power output p.(2.2b) Other mobiles and the consequently emerging interference I (see (2.2)) are considered. From nowon all signals are ∈ Rn, where n is the number of mobiles, and the channel attenuation g becomes ζ[i] = gii,where i ∈ {1, . . . , n}.
2.2.2 Multiple-Mobile Case
The second considered case, depicted in Figure 2.2b, is the multiple-mobile case. Here,
the influence of other mobiles is explicitly modeled by the interference function I, which
was defined in (2.2). Now, both paths accommodate feedback; the upper interference
path, however, has a nonlinearity in it. This nonlinearity will be treated in more detail
in Chapter 3. The attenuation in the lower signal path is henceforth denoted by ζ ∈ Rn,
where ζ[i] = gii.
Note that all signals from now on are vectors in Rn, where n is the number of considered
mobiles. Accordingly, all blocks represent multivariate operators/transfer functions. Due
to the distributed nature of our system, only local informations are available. Thus, the
controller blocks are assumed to be diagonal, i.e. B = diag{bi} and M = diag{mi}.

2.2 Block Diagram 17
2.2.3 Delay Case
The next addition to our block diagram are time delays, which are an issue in the real-
world system. They occur mainly because of computation time in the signal processing/the
controller of the base station and/or of the mobile and may also occur due to the fact that
the propagation velocity of radio waves is limited. The latter, however, is commonly not an
issue in mobile networks since the cells are sufficiently small in size and thus propagational
delays can be neglected in most cases.
In Figure 2.3a, time delays are depicted by Dj . In particular, DB, DM and Dp are
the delays that occur in the base station, the mobile and due to propagation, respectively.
Generally, Dj is defined as diag(
q−δj,ii
)
, where the δj,i are the number of samples delay
of block j affecting channel i and q is time-shift operator. Keep in mind that the delay
might vary for each channel. Note that Dj corresponds to diag(
z−δj,ii
)
when considering
the frequency domain.
2.2.4 Complete Block Diagram
In order to complete our block diagram, we add an interference- and a signal-filter block,
Fι and Fς , which leads to Figure 2.3b. These filter blocks are composed of possibly differing
channel filters fi and thus defined as F = diag{fi}. Filters are implemented in real-world
systems in order to reduce measurement noise. The reason for explicitly modeling them
here is that they might generate additional dynamics and possibly delays which may not
be neglectable.
2.2.5 Rearranging the Block Diagram
There is only one block in Figure 2.3 which is assumed to be non-linear and widely unknown.
This block is the interference I. To isolate the interference, we pool all of the systems
dynamics into the dynamics block H. We do so by rearranging Figure 2.3b to Figure 2.4,

18 2 Modeling
I Dp
DBB Dp DMM
Dp
γ†
ζ
σ
e u p
ι
ς
−
(a) Delay case
Fι I Dp
DBB Dp DMM
Fς Dp
γ†
ζ
σ
e u p
ι
ς
−
Base Station ChannelMobile Station
(b) Complete diagram
Figure 2.3: Step-by-Step Derivation of our Block Diagram (pt.2)
(2.3a) Time delay blocks for base station DB, the mobile DM and the propagation Dp are added toFigure 2.2b; computational delays are combined with their respective controller transfer function to stresstheir inseparability.(2.3b) Additionally, filters F for the signal ς and the interference ι are introduced; The dashed lines indicatethe base station, the channel and the mobile station.

2.2 Block Diagram 19
I
Fι DBB Dp DMM Dp
Fς
F−1ι Fς Dp
γ†
ζ
σ
e u
pι
−
ㆆ
H
Figure 2.4: Rearranged Block Diagram
The attenuation ζ is pulled out and a new input ㆆ is defined. Note that here, for notational convenience,p are the delayed output powers p[t− δp]. The dashed line indicates the blocks which are pooled into theso-called dynamics block H.
which, introducing the new input
ㆆ∆= F−1
ι γ† + FςDpζ,
ultimately leads to Figure 2.5. Note that the definition of the new input ㆆ obviously
requires the interference filter Fι to be invertible and its inverse to be stable. One can,
however, argue that this restriction is simply a modeling issue and thus does not affect the
real system. Another point of view is that unstable F−1ι would immediately be stabilized
by its own inverse, see Figure 2.4. Having completed the derivation of the block diagram
for the considered system, we move on to the derivation of its transfer function.

20 2 Modeling
I
Hㆆ
pι
Figure 2.5: Simplified Rearranged Block Diagram
Wireless network in a standard layout from the new ㆆ to p. This structure facilitates the investigationof the influence of the interference.
2.3 Transfer Function
Transfer functions are the very basis for investigating linear time-invariant (LTI) systems.
They give a description of the system’s input-output behavior in the frequency domain.
The transformation from the time domain into the frequency domain is commonly done
by Fourier transformation for continuous-time signals and by the z transformation for
discrete-time systems. More information on this topic can be found in every good control
theory book.
In this short section, we will derive the transfer function of the final block diagram,
Figure 2.5. Additionally, we will state some transfer functions for the so-far abstract
controller- and filter-blocks at the end of this section. The introduced controller- and
filter-implementations will be used in the subsequent analysis.
2.3.1 Transfer Function of our Block Diagram
The simplified block diagram, depicted in Figure 2.5, yields the simple transfer function
p = H(ㆆ + ι).

2.3 Transfer Function 21
The transfer function of the dynamics block H can be derived by considering Figure 2.4 as
follows:
p = DpDMMDpDBB(Fι(ㆆ + ι)− Fςp)
⇔ p = (I +DMBFς)−1DMBFι(γ
†† + ι)
where D = DBDMD2p contains the overall delay and I is the n-dimensional identity matrix.
Consequently,
H = (I +DMBFς)−1DMBFι. (2.5)
This transfer function will find great use in the Nyquist analysis in Chapter 4. All blocks –
except, of course, the interference – are assumed to be diagonal. This depicts that only local
information is available. Assuming, furthermore, that our system is homogeneous, i.e. all
channels share the same controller, filter and delay we get hi = h for all i. Hence, H = hI,
with
h =bmfι
zδ + bmfς, (2.6)
where b = B[i,i], m = M[i,i], f = F[i,i] and δ = δb + δm + 2δp is the number of samples
delay in total. We end this chapter by introducing some typical implementations of the
still-abstract sub-blocks.
2.3.2 Block implementations
A strength of the block diagram approach is that we did not need to specify the single
blocks in more detail. If we, however, want to analyze the system dynamics, they have to
be defined at some point. Table 2.1 depicts some possible realizations for the controllers in
the base station and the mobile station as well as two possible filters. Note that the local
average filter fLA has no stable inverse (see Section 2.2.5).

22 2 Modeling
Table 2.1: Transfer functions of typical implementations of system components
Transfer Function Description
dj = 1
zδj
Delay of one, often used as additional factor
kP = κP P-controller with gain κPkI = κI
zz−1
I-controller with integrator gain κIkPI = κP + κI
zz−1
PI-controller with gain κP and integrator gain κI
fLA =∑ν−1
i=0 z−i
νlocal average filter, which takes ν ∈ N steps into account
fEF = z(1−φ)z−φ
, φ ∈ (0, 1) exponential forgetting filter; ≈ 21−φ
contributing measurements [12]
We will frequently consider the following standard case
bi = dm,ikP,i =κP,izδm,i
, mi = db,ikI,i =zκI,i
zδb,i(z − 1), fι,i = fς,i = 1,
that means we have an integrator in the mobile which is driven by the proportional con-
troller in the base station. Note, however, that in the current diagonal LTI layout it
actually does not matter where which controller is situated1. Thus, it is sufficient to model
the homogeneous unfiltered system as
h(z) =k(z)
zδ + k(z), (2.7)
where k is the joined controller of base and mobile station and δ is the overall delay δb +
δm + 2δp.
For the given standard case we can without loss of generality assume the proportional
base-station gain to be one. This leads to the following transfer function for our lower-loop
dynamics:
hI =κI
zδ−1(z − 1) + κI. (2.8)
1The whereabouts of the specific controllers will play a role later on, when we model the binary feedbackbetween base station and mobile in Chapter 7.

2.4 Conclusion 23
2.4 Conclusion
In order to model our system, we first defined our controller objective, the so-called SIR γ.
This required us to have a look at different wave-propagation phenomena which disturb
wireless communication. During the course of this discussion, we defined the so-called gain
matrix G which will be used from now on to depict the networks connectivity. Connec-
tivity in this context does not only stand for ‘which mobile interacts with which other
mobile’; since we assume every mobile to have an influence on all other mobiles in the
same network/model, connectivity here means ‘how strong are those interactions’.
The outcome of this chapter is not only that we have a transfer function for our system,
in the course of its derivation we also built the system’s block diagram. This block diagram
can aid greatly in understanding system dynamics and especially helps to explicitly see
what happens where. A drawback of the system as-is is that we still have a nonlinearity in
it: the interference function I. We will tackle this problem with a linearization approach
in the next chapter.

24 2 Modeling

Chapter 3
Steady-State Analysis
In this chapter, we will first give an analytical expression for the steady-state vector of
power outputs – henceforth only referred to as the steady state. Then, we will study its
feasibility, i.e. the existence of a feasible steady state, which is, of course, indispensable if
one wants to stabilize the system. Finally, we will linearize our system around this steady
state in order to gain further insight by using tools from linear systems analysis such as
the Nyquist criterion.
3.1 Computing the Steady State
A steady state of our system is a point in state space where the power-output level of every
mobile remains constant for all times if it is unperturbed. This state is defined as follows:
Definition 2 (Steady State). The system is said to be in a steady state if
p[t+ 1]− p[t] = 0, ∀t
where pi[t] is the power output level of mobile i at sample t, and i ranges from 1 to n, the
total number of considered mobiles. The steady-state power-output level is denoted pss.
We search for a steady state where the network provides every user with a satisfying quality
of service, i.e. γi ≥ γ†i , where the latter is the minimal SIR to provide sufficient service,
25

26 3 Steady-State Analysis
the target SIR. It has been shown that the steady state where every mobile i has a SIR of
exactly γ†i is optimal in the sense that the vector of power outputs p is indeed minimal [10].
A minimal power output is desirable because it leads to maximal battery life. Hence, using
(2.3), we search for the output powers where
γ†i!= γi =
(1− αi)giipi,ssσi + αigiipi,ss +
∑
j 6=i gij pj,ss. (3.1)
In the following derivation we drop the additional index ‘ss’ for improved readability.
Rearranging (3.1) to
pi =γ†i
(1− αi)gii
(
σi + αigiipi +∑
j 6=i
gij pj
)
,
and bringing it in matrix-vector form,
p1...
pn
= diag
(
γ†i(1− αi)gii
)
σ1...
σn
+
α1g11 g1n. . .
gn1 αngnn
p1...
pn
,
yields
p = Γ†(σ + F p)
⇔ p = (I − Γ†F )−1Γ†σ, (3.2)
where
Γ† ∆= diag
(
γ†i(1− αi)gii
)
, σ[i]∆= σi and F[i,j]
∆=
αigii for i = j
gij for i 6= j.
Note, though, that various definitions for what we call F , Γ† and σ can be found in
the literature [6, 10]. Most interestingly, the spectrum of Γ†F can differ dependent on

3.2 Feasibility 27
the notation1. The spectrum plays a role in the investigation of the system’s feasibility,
stability and rate of convergence.
Furthermore, note that the derivation of the steady state was independent of b and m.
As long as we assume our system to have integral behavior, i.e. a pole at 1, this steady
state will be preserved. Note that this is the same steady state as for the famous DPC
algorithm [3], where
pi[t+ 1] =γ†iγipi[t].
It translates to a simple integrator in our framework. A proof can be found in [9].
We will now focus on the feasibility of the steady state pss. The investigation of its
stability can be found in Chapter 4, an estimation of the rate of convergence in Chapter 5.
3.2 Feasibility
The power output vector in the steady state pss must be non-negative in order to be feasible.
This is simply due to the fact that one cannot send out negative energy. Translated into
an equation this condition gives, with (3.2),
(I − Γ†F )−1Γ†σ!≥ 0. (3.3)
The latter part, Γ†σ, is always non-negative as all γ†i , gii as well as σi are non-negative and
consequently Γ† as well as σ is non-negative. Hence, the feasibility depends solely on the
first part of (3.3). In order to prove its non-negativity we utilize the following theorem:
Theorem 1 (from [15], abbreviated). The following statements are equivalent
(I − A)−1 =
∞∑
i=0
Ai and ρ(A) < 1,
where A is a n× n-matrix and ρ(A) is its spectral radius.
1Not further investigated in this thesis.

28 3 Steady-State Analysis
In our case that means if and only if ρ(Γ†F ) < 1 we can rewrite
(I − Γ†F )−1 as
∞∑
i=0
(Γ†F )i
and thus show the non-negativity and consequently feasibility of pss by proving Γ†F to be
non-negative. We show this by simply writing out
Γ†F =
α1
(1−α1)γ†1
g1n(1−α1)g11
γ†1. . .
gn1
(1−αn)gnnγ†n
αn
(1−αn)γ†n
.
Keep in mind that αi < 1, see Section 2.1.3. Thus, Γ†F is always non-negative since all
of its components are non-negative. Therefore, the feasibility condition condenses to the
spectral radius condition
ρ(Γ†F ) < 1. (3.4)
Accordingly, the matrix product Γ†F will from now on be called feasibility matrix.
For positive matrices the Perron-Frobenius theorem states that the biggest eigenvalue,
i.e. the spectral radius, is always simple and real. This holds also for non-negative matrices,
but only if they are irreducible [4]. Irreducibility for matrices is closely related to graph
theory and it basically means that every node has to be reachable from every other node,
no matter how many steps it takes. In our framework, a reducible matrix would mean that
there exists a mobile or a group of mobiles which does/do not influence the other mobiles
and hence it would make only limited sense to model them in the same network.
We have just shown that the system is always feasible when ρ(Γ†F ) < 1. A first

3.2 Feasibility 29
approximation of the feasibility directly from the gain matrix G can be derived as follows:
ρ(Γ†F ) < 1
⇔ maxk
|λk(Γ†F )| < 1
and thus
∣∣∣∣∣∣∣∣∣
λk
α1
(1−α1)γ†1
g1n(1−α1)g11
γ†1. . .
gn1
(1−αn)gnnγ†n
αn
(1−αn)γ†n
∣∣∣∣∣∣∣∣∣
< 1 ∀k, (3.5)
where k ∈ {1, · · · , n} is the arbitrary chosen numbering of the eigenvalues. Using Gersch-
gorin Disks [5] we know that the eigenvalues of a matrix A lie within the union of circles
around its diagonal elements aii. The circles’ radii are their respective off-diagonal row-
or column-sum, where, of course, the smaller radius gives the better bound. Hence, the
following condition is sufficient for feasibility:
αi(1− αi)
γ†i +
n∑
j = 1
j 6= i
1
1− αj
gjigjjγ†j < 1, ∀j
or
αi(1− αi)
γ†i +
n∑
j = 1
j 6= i
1
1− αi
gijgiiγ†i < 1, ∀i
.
We conclude the subsequent rule of thumb:
Rule of Thumb 1. Assuming the channel gains gii to be one, no auto-interference and
all target SIR γ†i to be equal, the system’s feasibility can be guaranteed if all row- or all
column-sums of the cross-channel gains are smaller than the reciprocal SIR.

30 3 Steady-State Analysis
3.3 Linearization
Now that we have found the system’s feasible steady state, we can linearize the interfer-
ence I around it and by doing so linearize the whole system. The linearized interference
will henceforth be denoted ∇I. Keep in mind that I = 10 log10(I), see Section 2.1.2. Due
to this nonlinearity we must apply the chain rule properly, which yields
∇I∆=∂I
∂p
∣∣∣∣p=pss
= diag(Ii)−1 ∂I
∂p
∣∣∣∣p=pss
and thus, using (2.2),
∇I[i,j] =
αigiipi,ss/Ii for i = j
gij pj,ss/Ii for i 6= j, (3.6)
where Ii is defined by (2.2) and evaluated at p = pss.
Employing the linearized interference gives Figure 3.1, which, using (2.5), yields
∆p = H(ㆆ +∇I∆p)
⇔ ∆p = (I − H∇I)−1Hㆆ
= (I +DMB(Fς − Fι∇I))−1DMBFιㆆ,
where ∆p is the vector of output powers, linearized around the steady state pss.
∇I
Hㆆ
∆pι
Figure 3.1: Simplified Rearranged and Linearized Block Diagram
The linearized interference function ∇I allows for an expression of ι as a function of ∆p and thus for linearanalysis of the now completely linearized system.

3.4 Connection between the Linearized Interference and Feasibility Matrix 31
3.4 Connection between the Linearized Interference
and Feasibility Matrix
Most interestingly, there exists a close connection between the linearized interference ∇I
and the feasibility matrix Γ†F .
Theorem 2. The linearized interference ∇I and the feasibility matrix Γ†F , both evaluated
at p = pss, have the same eigenvalues.
Proof. Using (2.2) and (2.3), we can write
Ii =(1− αi)giipi,ss
γ†i,
which, plugged into (3.6), yields
∇I[i,j] =
αi
(1−αi)γ†i for i = j
gij(1−αi)gii
pj,sspi,ss
γ†i for i 6= j. (3.7)
Keeping in mind the structure of Γ†F
Γ†F[i,j] =
αi
(1−αi)γ†i for i = j
gij(1−αi)gii
γ†i for i 6= j
we rewrite (3.7) into
∇I = diag(pss)−1Γ†Fdiag(pss).
Using the fact that λ(A) = λ(M−1AM), where M is a non-singular matrix, completes the
proof.

32 3 Steady-State Analysis
3.5 Conclusion
In this short chapter, we found the system’s steady state. We also gave a condition for its
feasibility as well as a rule of thumb which provides a sufficient condition for the system’s
feasibility solely based on the gain matrix G and γ†. Most importantly, we brought the
whole system into a linear form by linearizing the interference function I around the steady
state. Based on the linearization, we will investigate the system’s stability locally in the
next chapter.
Note that we could show a direct connection between the linearized interference ∇I
and the feasibility matrix Γ†F . This facilitates the analysis and also shows how the target
SIR and the gain matrix affect stability.

Chapter 4
Nyquist Analysis
The Nyquist stability criterion is a classical easy-to-use tool in linear systems analysis
which was postulated 1932 by Harry Nyquist [16]. Despite of its age, Nyquist’s criterion
is still widely used up to date. One of its great advantages is that one can illustrate the
stability of even multi-dimensional systems in one figure, the so-called Nyquist plot. With
the linearization from Section 3.3 and some minor modifications, Nyquist’s criterion is
applicable to our system.
In this chapter, we will first state the general Nyquist criterion for the one- and the
multi-dimensional case, both in their discrete-time version. Then, we will utilize the prop-
erties of our system to derive a problem-specific Nyquist criterion. This criterion will then
be used to investigate some example networks.
33

34 4 Nyquist Analysis
K G
(a) Open Loop
G
K
−
(b) Parallel Closed Loop
K G−
(c) Serial Closed Loop
h
∇I
+
(d) Our closed loop
Figure 4.1: Standard Loop Layouts
Loop layouts (a)–(c) are considered standard. Both, the serial and the parallel loop can be used to deriveNyquist’s criterion since their poles are the same. The difference in our case is not only the exchangedposition of controller and plant but also the positive, instead of the negative, feedback. Note that thepositioning of the feedback as upper loop is solely for the purpose of generating resemblance with theformerly-derived block diagrams.
4.1 Preliminaries
Nyquist’s criterion allows stability analysis of a closed loop (Figure 4.1b, 4.1c) by only
considering the open loop (Figure 4.1a). For its statement we use the open-loop transfer
function
G0 = GK, (4.1)
where G is the transfer function of the plant and K is the transfer function of the controller.
Note that our system is not entirely in one of the standard layouts (Figure 4.1b, 4.1c) which
are normally used to state the Nyquist criterion. Their transfer functions are
Gserial = (I +GK)−1GK = (I +G0)−1G0
Gparallel = (I +GK)−1G = (I +G0)−1G,

4.1 Preliminaries 35
-2 -1 0 1 2-2
-1
0
1
2
Im
Re-2 -1 0 1 2
-2
-1
0
1
2
Im
Re
g0=⇒
Figure 4.2: Nyquist Contour
On the left, we have the plot of z = ejφ when φ ∈ [0, 2π), the well-known unit circle. On the right, wehave the so-called Nyquist contour, which is the unit circle under the mapping of g0.
where I is the n-dimensional identity matrix and (4.1) holds. We, nevertheless, state the
criterion in a classical way but want to point out the swapped position of ‘plant’ ∇I and
‘controller’ H. The problem’s layout results in
Ghere = (I − H∇I)−1H = (I −G∗0)
−1H,
where G∗0 = H∇I. The positive – instead of the more common negative – feedback is
already accounted for.
When talking about Nyquist’s criterion the statement of the so-called Nyquist contour
is hard to avoid. Basically, the Nyquist contour is the image of the unit circle under the
mapping of the considered function. So, for example, an open-loop transfer function of
g0(z) =0.5
z(z − 1) + 0.5
would lead to Figure 4.2.
Keep in mind that we are analyzing the linearized system, not the system itself. Thus,
the results of this chapter will only hold in a neighborhood around the steady state.

36 4 Nyquist Analysis
4.1.1 One-Dimensional Nyquist Criterion
Here, we state the time-discrete one-dimensional Nyquist criterion without proof. Proofs
can frequently be found in the literature.
Theorem 3 (Nyquist Criterion). Assume G0(z) has no poles on the unit circle. Let
Φ(1 +G0(z)) be the counter-clockwise phase rotation of 1 +G0(z) about the origin when z
counter-clockwise traverses the unit circle and let #p be the number of poles of G0(z) inside
the unit circle. Then, the closed loop is stable if and only if
Φ(1 +G0(z))!= 2π#p.
Note that 1 +G0(z) must not be 0 for all z on the unit circle for this theorem to hold.
The more classical version of the Nyquist criterion is formulated in the continuous fre-
quency domain. There, the poles in the left s half plane are of interest. Furthermore,
often Φ(G0(z)) instead of Φ(1 +G0(z)) is considered and consequently the phase rotation
about the so-called Nyquist point (−1, 0) instead of the origin is measured. One may also
find definitions where z only traverses half the unit circle and therefore half the rotation
has to occur.

4.1 Preliminaries 37
4.1.2 Multi-Dimensional Nyquist Criterion
The multi-dimensional extension of the classical formulation reads very similar and is,
again, stated without proof. An insightful proof can e.g. be found in [11].
Theorem 4 (Multivariate Nyquist Criterion). Assume G0(z) has no poles on the unit
circle. Let Φ (det(I +G0(z))) be the counter-clockwise phase rotation of det(I + G0(z))
about the origin when z counter-clockwise traverses the unit circle and let #p be the number
of poles of G0 inside the unit circle. Then, the closed loop is stable if and only if
Φ (det(I +G0(z)))!= 2π#p.
Note that det(I + G0(z)) must not be 0 for any z on the unit circle for this theorem to
hold. Furthermore, G0(z) is n-dimensional and accordingly I is the n-dimensional identity
matrix.
Nyquist’s Criterion is also capable of handling poles at the border of stability, i.e. poles
that lie exactly on the unit circle. In order to include those, one has to add diminishing
indentations to the Nyquist contour – in the time-discrete case the unit circle – enclosing
these poles. Then each conjugate-complex pair of poles corresponds to an additional #p.

38 4 Nyquist Analysis
4.2 Analytical Usage
So far, the multivariate Nyquist criterion is of little practical use as we would have to plot
the Nyquist locus for every single controller K. In this section, we utilize the structure of
our system to get a practicable test for stability. A similar derivation was done in [2].
4.2.1 General Derivation
Assume the controller K to be frequency-independent and the plant G to be diagonal with
only identical sub-systems g, i.e. G = gI. Using the facts that
det(·) =∏
i
λi(·) and λi(I + cM) = 1 + cλi(M),
where λi(·) denotes the eigenvalues of ‘·’, M is a matrix and c is a constant, we get
det(I +G(z)K) =∏
i
(1 + g(z)λi(K)).
Keep in mind that we are ultimately interested in the phase rotation. In order to isolate
the phase, we can write any complex number in the form
z = z ejφ,
where z ∈ C; z is its amplitude and φ its phase. Since exponents add up when multiplied,
we can write
Φ (det(I +G(z)K)) =∑
i
Φ (1 + g(z)λi(K)) ,
where Φ(·) is the phase rotation of ‘·’. Pulling out the eigenvalues yields
Φ (det(I +G(z)K)) =∑
i
Φ((λi(K)
−1 + g(z))λi(K))
=∑
i
Φ(λi(K)
−1 + g(z))+ Φ(λi(K))︸ ︷︷ ︸
=0

4.2 Analytical Usage 39
and hence
Φ (det(I +G(z)K)) =∑
i
Φ(λi(K)
−1 + g(z)). (4.2)
Thus, we have shown that the stability of the closed loop can be investigated by counting
the number of counter-clockwise encirclements of −λi(K)−1 by the Nyquist contour of G(z)
when z traverses the unit circle counter-clockwise. This means we only have to study one
Nyquist plot of g(z) in order to infer stability for all K.
4.2.2 Problem-Specific Usage
As mentioned in Section 4.1, the plant G(z) corresponds in our case to the dynamics
block H(z), which includes the actual controllers, while the usual controller K(z) here only
includes the linearized interference ∇I. Assuming the system to be homogeneous, see
Section 2.3.2, we have H(z) = h(z)I. Taking also the positive feedback into account, we
get from (4.2) that
Φ (det(I +∇Ih(z))) =∑
i
Φ(−λi(∇I)−1 + h(z)
).
Hence, we can conclude the following theorem:
Theorem 5. Let h(z) be the stable transfer function of the dynamics block (see Figure 2.4).
For i from 1 to n, where n is the number eigenvalues, let Φ (−λi(∇I)−1 + h(z)) be the
counter-clockwise phase rotation of h(z) about λi(∇I)−1 when z traverses the unit circle in
counter-clockwise direction. Then the linearized system is stable if and only if
∑
i
Φ(−λi(∇I)−1 + h(z)
) != 0.
Since cancellations of clockwise and counter-clockwise encirclements are rare for the con-

40 4 Nyquist Analysis
sidered system, we will frequently use the sufficient condition
Φ(−λi(∇I)−1 + h(z)
) != 0 ∀i.
This theorem allows for an in-depth investigation of the influence of the linearized inter-
ference ∇I on the system’s performance. We want to point out that h(z) has to be stable
for Theorem 5 to hold.
4.3 Application
In this section, we show how to apply the problem-specific stability analysis. As a simple
example, we will consider two three-mobile networks G1 and G2. We will check feasibil-
ity and then move on to checking the performance of different controllers with the just
introduced Nyquist analysis. Our results will be verified by time-domain simulations.
First of all, we have to make sure to use only stable h(z). A check of our standard
case (2.7) with a PI-controller gives Figure 4.3. There, we plot the maximum κP and κI
leading to a stable lower loop. We begin with an overall delay δ of 2 in order to have
strictly proper update rules in both, the base station and the mobile.
For the sake of this discussion, consider the following target SIR and noise terms:
γ†i = 10 and σi = 10 ∀i (4.3)
These terms are arbitrarily chosen since they basically only scale the results. Now, consider
two networks with their respective gain matrices G1 and G2.
G1 =
1.000 0.012 0.013
0.021 1.000 0.023
0.031 0.032 1.000
G2 =
1.000 0.120 0.130
0.210 1.000 0.230
0.310 0.320 1.000
Applying Rule of Thumb 1 we expect, on the one hand, that the second network is not

4.3 Application 41
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
1.0
κP
κI
δ = 2
δ = 3
δ = 4
δ = 5
δ = 6
Figure 4.3: Stability Region of the Dynamics Matrix
Considering (2.7) with a PI-controller and an overall delay δ = δb + δm + 2δp from two to six we getthe shaded regions of stability for the parameters κI and κP . The stability of the dynamics matrix is anecessary condition for Theorem 5 to hold. Note that this figure, naturally, also captures the case of soleproportional or integral control on its axes.
feasible and know, on the other hand, that the first case is indeed feasible; both, of course,
regarding a target SIR of ten. Checking the eigenvalues of the respective feasibility matrices
reveals
λ(Γ†F1) = {0.503282,−0.321858,−0.181424}
λ(Γ†F2) = {5.03282,−3.21858,−1.81424}
and thus that the spectral radius condition (3.4) is indeed violated for G2. Accordingly,
we move on to the analysis of G1.
As a first control law, we investigate the so-called Distributed Power Control (DPC)
Algorithm. It was first postulated by Foschini and Miljanic in 1993 [3] and had great
impact on the communication community [14]. In our framework, DPC corresponds to

42 4 Nyquist Analysis
æææ
-6 -4 -2 0 2-2
-1
0
1
2
Im
Re
Figure 4.4: Stability Investigation of G1 under DPC Control
Here, the red dots depict the reciprocal eigenvalues of the feasibility matrix Γ†F1 of network G1. The blackcurve represents the Nyquist plot of hDPC . Since there are no encirclements of the reciprocal eigenvaluesby the Nyquist plot, the DPC algorithm stabilizes network 1, pursuant to Theorem 5.
unfiltered integral control with a gain κI of one; a computational delay of one, but no
further delays are considered. Hence, using (2.8), hDPC equates to
hDPC(z) =κI
z − 1 + κI=
1
z.
The examined system is stable when the Nyquist plot of hDPC(z) does not encircle any
eigenvalues of the feasibility matrix Γ†F . The latter is a function of the gain matrix G
while the former is not. Plotting the Nyquist curve of the DPC algorithm gives the unit
circle, see Figure 4.4. Keeping in mind the spectral radius feasibility condition (3.3), we
see that for DPC stability and feasibility coincide. Thus, any feasible system with no more
than one delay is stabilized – this naturally includes G1.
As a further example, consider a slightly more realistic case where there is an overall
delay δ of two. For the sake of this discussion, we choose an I-controller with gain κI = 0.5
resulting, with (2.8), in
h1(z) =0.5
z2 − z + 0.5.
This is a stable transfer function, which can be shown by checking its poles or simply
looking up Figure 4.3. Plotting the reciprocal eigenvalues of Γ†F1 and the Nyquist plot
of h1(z) yield Figure 4.5. For the chosen parameters there are no encirclements of the

4.3 Application 43
æææ
-6 -4 -2 0 2-2
-1
0
1
2
Im
Re
Figure 4.5: Stability Investigation of G1 with System h1
The same definitions as in Figure 4.4 hold. Hence, since there are no encirclements, the overall system isstable. Note that the increased delay involves a further encirclement of the origin and, even though theintegrator gain is smaller, a larger curve.
inverse poles of Γ†F1. Thus, according to Theorem 5, the system is stable.
Now, reconsider the second network, G2, and a two-delay PI-controller with κP = 1
and the same integral part as before, κI = 0.5, i.e.
h2(z) =1.5z − 1
z3 − z2 + 1.5z − 1.
Plotting this controller in conjunction with the reciprocal eigenvalues of Γ†F2 gives Fig-
ure 4.6. This plot suggests that G2 is stabilized by h2(z). That, however, is a fallacy
since there exists no feasible steady state which could be stabilized for G2. Furthermore,
the parameters are chosen such that h2(z) is unstable. Hence, the requirements for Theo-
rem 5 were not met in the first place. With this daunting example we want to stress the
importance of checking the required conditions before applying Theorem 5.
The time-domain plots in Figure 4.7 confirm the anticipated behavior. The powers for
the individual mobiles approach their respective steady states for our first example while
in the second case, the system is unstable.

44 4 Nyquist Analysis
æææ
-2 0 2 4 6-2
-1
0
1
2Im
Re
Figure 4.6: Stability Investigation of the Infeasible Network G2
This figure is an example for the misuse of Theorem 5. It contains no encirclements of the reciprocaleigenvalues of Γ†F2 (red) by the Nyquist plot of h2 (black). Accordingly, the plot suggests stability of theconsidered system. This, of course, is wrong since the requirements for Theorem 5 were not met.
0 10 20 30
18
20
22
24
26
t
pi(t)
(a) Time-Domain Plot of Figure 4.5
0 10 20 300
100
200
300
400
t
pi(t)
(b) Time-Domain Plot of Figure 4.6
Figure 4.7: Time-Domain Plots of the Considered Examples
These plots show the course of the output powers pi of the considered three mobiles over the time t in red.Their respective steady-state power pss are depicted by a dashed black line. Note that the network G2,which is considered in the right plot, has no feasible steady state for the considered parameters.

4.4 Conclusion 45
4.4 Conclusion
In this chapter, we first presented some basics of Nyquist analysis. Then, we moved
on to utilize the system’s characteristics to derive a problem-specific Nyquist criterion.
Furthermore, we showed how to apply this criterion on a simple example and pointed out
that special attention should be paid to the theorem’s requirements.
We now have a powerful tool to investigate the system’s stability. Keep in mind,
however, that Nyquist analysis is based on the system’s linearization and thus only holds
in a neighborhood of the steady state. We will see in Chapter 8, though, that typically
this region is adequately large for our considered system.
So far, the Nyquist analysis gives only information whether the system is stable or not.
The subsequent chapter will deal with analyzing the system from a performance point of
view, relying heavily on the results from this chapter.

46 4 Nyquist Analysis

Chapter 5
Rate of Convergence
We have just investigated the system’s stability. Another very important system property
is the time which our controller needs to stabilize the system. This chapter is dedicated to
finding a measure for this rate of convergence.
First, we will introduce a scaling for the system states in the time domain. With
this scaling we are able to give exponential bounds on its rate of convergence. In the
next section, we will translate the time-domain scaling into the frequency domain via the
z transform. Finally, we will investigate the rate of convergence for the example of the
previous chapter.
47

48 5 Rate of Convergence
5.1 Scaling in the Time Domain
In order to find a bound on the rate of convergence of our system, first consider the following
scaled version of the system’s states
∆p(t)∆= at∆p(t), (5.1)
where a > 1 is the scaling factor. Suppose the scaled system is stable, i.e.
limt→∞
∆p(t) = ∆pss (5.2)
has to hold. Since we have linearized our system around the steady state, ∆pss equals 0.
Furthermore, it follows directly from (5.1) that
∆p(t) = a−t∆p(t),
and with (5.2) that our nominal system in ∆p converges factor a faster than the scaled
system in ∆p does. The analysis of the system’s stability was done in the frequency domain,
not the time domain. Hence, we move on to the z transform of the just introduced scaling.

5.2 Scaling in the Frequency Domain 49
5.2 Scaling in the Frequency Domain
For the translation of the time-domain scaling into the frequency domain we use
atf(t) ◦–• F (z/a) (5.3)
from [1], where a is a constant, f(t) is a function in the time domain and F (z) is its
z transform. This scaling has, of course, a negative effect on the systems stability. To
investigate the stability of the scaled system, we once more utilize Theorem 5. Accordingly,
we have to check the stability of H(z) = H(z/a). This includes the check of the poles of
the scaled transfer function itself as well as the Nyquist contour of the scaled system.
Note that the poles of the feasibility matrix Γ†F are not frequency dependent and thus
do not change with the scaling; the Nyquist plot of h(z), however, will. Unfortunately,
this happens in a non-linear fashion. Some intuition on the nature of the changes can be
obtained by the examples in the next section.

50 5 Rate of Convergence
5.3 Examples
Consider the standard case (2.8) with integral control and an overall delay of two where
hI(z) =κI
z2 − z + κI.
Scaling this system with (5.3) yields
hI(z) =a2κI
z2 − az + a2κI.
Now, let us first investigate the set of stable a for all stable κI . Figure 5.1 was obtained
by simply checking the poles of hI(z) and shows the region of stability.
0.0 0.2 0.4 0.6 0.8 1.0
1.0
1.2
1.4
1.6
1.8
2.0
κI
a
δ = 2
δ = 3
δ = 4δ = 5δ = 6
Figure 5.1: Stability Region of the Scaled Dynamics Matrix hI for δ from 2–6
Considering h with an I-controller and an overall delay δ = δb + δm + 2δp, we get the shaded regions ofstability for the parameters κI and a. Increasing delay leads to decreased maximal possible a. Note thatthe stability of hI is just a necessary condition for the system’s stability, no sufficient one.
The next step, the Nyquist stability analysis, cannot be done so easily, though. We

5.3 Examples 51
æææ
-6 -4 -2 0 2-2
-1
0
1
2
Re
Im
a = 1.0
a = 1.1a = 1.2
(a) G1, κI = 0.1, δ = 2
æææ
-6 -4 -2 0 2-2
-1
0
1
2
Re
Im
a = 1.0a = 1.1
a = 1.2
(b) G1, κI = 0.2, δ = 2
æææ
-6 -4 -2 0 2-2
-1
0
1
2
Re
Im
a = 1.0a = 1.1
a = 1.3a = 1.2
(c) G1, κI = 0.4, δ = 2
æææ
-6 -4 -2 0 2-2
-1
0
1
2
Re
Im
a = 1.0a = 1.1
a = 1.3a = 1.2
(d) G1, κI = 0.5, δ = 2
Figure 5.2: Rates of Convergence for Integral Control of G1
Each subfigure holds plots of the same system, differently scaled. Dashed lines mark unstable systems,dotted lines mark unstable h and thus invalid plots. Most interestingly, smaller gain may lead to fasterrate of convergence – compare Figure 5.2c and 5.2d. Keep in mind, that for Theorem 5 to hold, h has tobe stable. This is indeed not given for a ≥ 1.2 in Figure 5.2a.
consider the example network G1 from Section 4.3 and pick four gains κ1 = 0.1, κ2 = 0.2,
κ4 = 0.4 and κ5 = 0.5. Figure 5.2 illustrates the influence of growing a, beginning at one,
the unscaled case, up to the respective borders of stability. It could be expected that the
biggest stable gain yields the best rate of convergence. This is, however, not the case here,
see Figure 5.2.
Remember that the scaling only gives an upper bound on the rate of convergence. A
time-domain plot of an interesting example can be found in Figure 5.3. Here, it is shown
that a higher gain can lead to a slower rate of convergence, just as it was predicted by our
frequency-domain analysis.

52 5 Rate of Convergence
5.4 Conclusion
In this short chapter, we could find bounds on the systems rate of convergence by simply
introducing a scaling factor a. This was motivated by a time-domain consideration but
could easily be adopted into the frequency domain, where we could use the results from
Chapter 4. We also investigated the rate of convergence with a small example, where
time-domain simulations could verify our predictions.
Note, however, that we just found bounds on the rate of convergence, not the rate
itself. Those bounds might be conservative but qualitatively they often still give valuable
information. Furthermore, note that our results are based on a linearization around the
system’s steady state and are thus only valid locally. After finding a performance measure,
we now move on to improving the system’s performance with respect to time delays.
0 5 10 15 20 25 30 3515
20
25
30
t
pi(t)
Figure 5.3: Time-Domain Plot of Figure 5.2c and 5.2d
We compare the time-domain plots for network G1 under hbase with κI = 0.4 (red) and 0.5 (blue). Thebounds derived in Figure 5.2c and 5.2d suggest that the smaller gain should converge faster. This is indeedthe case. The dash-dotted pink line depicts the bound with a = 1.3.

Chapter 6
Time-Delay Compensation
The investigations in the previous chapters have shown that time delays are critical to
the stability of our system. In this chapter, we will therefore present the so-called Time-
Delay Compensation (TDC), see e.g. [6]. First, we will state the general idea behind TDC.
Then, we will visualize how TDC is implemented in the framework of the block diagrams
from Section 2.2. This will lead us directly to the derivation of the transfer function of the
delay-compensated system. Furthermore, we will derive an extended TDC controller for our
system that guarantees stability for any delay. Finally, we will investigate to which extent
TDC can compensate for time delays and what happens if one over- or undercompensates.
6.1 Idea
The goal of our controller is to guarantee a sufficient Signal-to-Interference Ratio γ. In
order to achieve this, it compares the target SIR γ† to the measured SIR γm resulting in
the control error
e[t] = γ†[t]− γm[t].
Problems occur when the measured data is outdated and thus
γm[t] = ς[t− δς ]− ι[t− δι],
53

54 6 Time-Delay Compensation
where δς and δι are the number of samples delay for the signal and the interference, re-
spectively. Using the time-shift operator q (see Section 1.3.1), the measured SIR follows
as
γm[t] = q−δς ς[t]− q−διι[t].
As a matter of fact, we know the current base station controller output u[t]. Thus, we can
approximate the actual signal ς[t] and consequently compensate for the delay simply by
subtracting the approximated delayed signal and adding the approximated current signal.
γmTDC [t] = q−δς ς[t]− q−διι[t]−q−δς ς[t] + ς[t]︸ ︷︷ ︸
TDC
⇔ γmTDC [t] = ς[t]− q−διι[t]
This results in the control error
e[t] = γ†[t]− ς[t]− q−διι[t],
which now only involves the interference delay δι. We will see later on that the delay in
the lower loop has a much larger effect on the system’s stability. Thus, the TDC will prove
very useful in our case.
6.2 Block Diagram and Transfer Function
Adding additional feedback paths to Figure 2.3b in order to cancel the lower delayed signal
path and to feed back the undelayed signal leads to Figure 6.1. The outer TDC path ideally
cancels the lower loop completely, leaving only the undelayed feedback of the ideal mobile.
Thus, theoretically all delays except the delay DB in the base station are canceled from
the lower loop.1
For notational convenience, let us condense the just introduced additional paths into a
1Note that the classical TDC is basically a Smith predictor

6.2 Block Diagram and Transfer Function 55
block T = diag(ti) (see Figure 6.2). This leads to a new base-station controller BTDC with
an inner loop. Component-wise it reads
bTDC =dbb
1 + dbbt, (6.1)
where
t = m− dpdmmdpfς
= m(1− dTDCfς),
with dTDC = dmd2p, the compensated delay. We can use this new time-delay-compensated
base-station controller block BTDC instead of a normal controller in the old block diagram
of Figure 2.3b. The derived time-delay compensation is very similar to the one derived
I Dp
Fι DBB Dp DMM
M Dp DMM
Fς Dp
Fς Dp
ㆆ
σ
e u
pι
−
−
+
T
Figure 6.1: Block Diagram with Additional Feedback Paths to Cancel Delays
We added two additional inner loops to Figure 2.3b. The dashed line marks the Time-Delay Compensation(TDC) block T. It ideally cancels the lower loop completely and adds the feedback of the ideal version ofthe mobile. Note that we can not cancel the base station’s delay DB with this TDC.

56 6 Time-Delay Compensation
in [6]. Note, though, that we do not filter both feedback paths, which originates from our
block-diagram point of view and leads to smaller Nyquist curves and thus to better results.
DBB
M
Fς Dp DMM Dp
e u
−
−
T
(a) BS Controller with Every Subblock
DBB
T
e u
−
(b) Condensed BS Controller
Figure 6.2: The Base Station’s TDC Controller
Here, we isolated the additional paths to show the base station’s TDC controller in more detail. Note thatthis controller can be plugged into the the existing framework without any further modifications.
6.3 Extension
The weakness of this approach is that it cannot compensate for delays in the base-station
controller. Keeping that in mind, one can analogously derive a similar controller for the
mobile. We have thus found means to cancel all lower-loop delays except the ones in the
base station; or to cancel all lower-loop delays except the ones in the mobile.
The logical next step is to combine those two time-delay compensators. One has to
keep in mind, however, that the TDC in the BS is dependent on the transfer function of the
mobile and vice versa. Applying such kind of double TDC is not practicable since both the
BS and the MS exactly need to know whether the other does compensate, and if, for which
delay. Especially when considering mobiles being in soft handover, i.e. being connected to
more than one base station while transitioning between cells, this is not feasible due to
possibly varying delays and compensations.
Let us reconsider the normal TDC again. Reducing its block diagram (Figure 6.1)

6.3 Extension 57
yields Figure 6.3 which has the following lower-loop dynamics:
hTDC =dbb
1 + dbbmdmmd2pfι. (6.2)
We see that the TDC does not actually cancel delays but merely shifts them out of the
feedback path. This results in less-delayed lower-loop dynamics with the same input-output
delay. The BS delay, however, remains and threatens to destabilize the system. Naturally,
analogous results hold for TDC in the MS.
An ultimate goal of a TDC is a totally undelayed feedback, i.e. a system where
h!=
b
1 + bmdbdmmd2pfι.
Using the transfer function (2.6) of the dynamics of the uncompensated system
h =dbbdmmd2pfι
1 + dbbdmmd2pfς
I
Fι DBB Dp DMM Dp
M
ㆆ
σ
e u
pι
−
Figure 6.3: Reduced Block Diagram of the Time-Delay-Compensated System
Considering the cancellations from Figure 6.1 gives this block diagram. Note that this analogously worksfor TDC in the mobile. The only difference in the block diagram would be switched B:s and M:s.

58 6 Time-Delay Compensation
we find the following ansatz:
dbb∗TDCdmmd2pfι
1 + dbb∗TDCdmmd2pfς
!=
b
1 + bmd∆mfι, (6.3)
where d∆ is the yet-unknown delay of the the time-delay-compensated dynamics. The
compensated base station’s transfer function dbb∗TDC has the following structure:
dbb∗TDC =
dbbt∗
1 + dbbt∗
and we search for a stable and proper t∗. Solving (6.3) gives
t∗ =d∆
dbdmd2p + dbdmd2pbm− dbdmd2pd∆fςbm− dbd∆b.
The question that arises is: are the introduced blocks (t∗ and dbb∗TDC) stable? If this was
the case, we would have found a controller that performs independent of the considered
system’s delay.
Note that if there are no delays in the base station, the traditional and the extended
TDC coincide. We now move on to an evaluation of the classical as well as the just derived
TDC controllers. A focus will lie on their robustness against errors in the prediction of the
time delays and the mobile gain as well as their internal stability.
6.4 Investigation
In this section, we will investigate the advantages and disadvantages of applying a Time-
Delay Compensation to our system. The tools we use will be the Nyquist analysis as
introduced in Chapter 4 as well as Matlab simulations to confirm e.g. rate-of-convergence
predictions (see Chapter 5). We will compare the traditional TDC to the just derived
extended TDC. Furthermore, we will investigate how both kinds of TDC perform when
too high/too low delays/gains are assumed, i.e. when one over- or undercompensates.

6.4 Investigation 59
6.4.1 Traditional TDC
Our stability analysis is based on Theorem 5 which is only applicable when the lower loop is
stable. Thus, we will first investigate the stability of the time-delay-compensated dynamics
block hTDC (6.2) in dependence of the delays and controller parameters. Remember that
in the investigation of the uncompensated lower loop, see Figure 4.3, we did not have to
distinguish where the delays occur. The reason for this is clear from the block diagram:
all delay blocks are found in linear succession and thus interchangeable in their position
due to their diagonal form and time invariance. The commutability, however, is destroyed
by the feedback loop introduced with BTDC . Hence, we have to investigate the impact of
delays in the base station and delays elsewhere separately.
0.0 0.5 1.0 1.5 2.00.0
0.2
0.4
0.6
0.8
1.0
κP
κI
δb = 1δb = 2
δb = 3δb = 4
δb = 5δb = 6
Figure 6.4: Stability Region of the BS-TDC Dynamics Matrix
Consider hTDC with a PI-controller and a delay of δb = 1. Now, increase δb step by step. The shadedregions then depict the regions of stable hTDC . The compensator delay δTDC is δm + 2δp. Note that thisplot captures any case of δm and δp. Those delays do not threaten stability, since they were compensatedfor by shifting them outside the feedback path.
Figure 6.4 shows the regions of stability for hTDC with a PI-controller in the mobile.
We begin with the case where there is one delay in each, the BS and the MS, and then
raise the delay δb in the base station. Not surprisingly, this plot is exactly the same as
Figure 4.3, when considering δb as δ. In fact, this single plot captures any combination of
delays outside the base station!
Keep in mind that the plot above only depicts the input-output dynamics of the ideal
case, i.e. the delay and gain of the system is known and consequently δTDC is chosen

60 6 Time-Delay Compensation
correctly to be δm +2δp. Furthermore, the TDC-intern model of the mobile mTDC behaves
exactly like mobile in the network m. Keep in mind that errors in the compensation might
destabilize even stable systems.
As an example, consider hTDC with integral control. Here, we get the stability regions
of Figure 6.5a and 6.5b for over- and undercompensation for delay in dependence of the
0.0 0.2 0.4 0.6 0.8 1.00.0
0.2
0.4
0.6
0.8
1.0
κI,T
DC
κI
δε = 0
δε = −1
δε = −2
δε = −3
δε = −4
(a) Undercompensated TDC
0.0 0.2 0.4 0.6 0.8 1.00.0
0.2
0.4
0.6
0.8
1.0
κI,T
DC
κI
δε = 0
δε = 1
δε = 2δε = 3δε = 4δε = 5
(b) Overcompensated TDC
0.0 0.2 0.4 0.6 0.8 1.00.0
0.2
0.4
0.6
0.8
1.0
κI,T
DC
κI
δε = 0
δε = −1δε = −2
δε = −3
δε = −4
(c) Undercompensated Stable TDC
0.0 0.2 0.4 0.6 0.8 1.00.0
0.2
0.4
0.6
0.8
1.0
κI,T
DC
κI
δε = 0δε = 1
δε = 2δε = 3δε = 4δε = 5
(d) Overcompensated Stable TDC
Figure 6.5: Stability Region of the Under-/Overcompensated BS-TDC Dynamics Matrix
Consider hTDC with an I-controller and a delay of δm = δb = 2 as well as δp = 1. The compensator delayδTDC is δm + 2δp + δε. Thus, we consider undercompensation in the left plots and overcompensation inthe right ones. The shaded regions depict the regions of stable hTDC . In the upper plots, only hTDC wastaken into account. The lower plots show the same system when also considering the stability of bTDC .

6.4 Investigation 61
internal and external mobile gain κI,TDC and κI . As one would expect, there is a stability
region roughly around the diagonal, i.e. where κI,TDC and κI are similar. When one,
however, also considers the internal stability, i.e. imposes that bTDC has to be stable,
one gets Figure 6.5c and 6.5d. Here, we see that the TDC introduces unstable pole-zero
cancellations for higher gains. Those have to be taken into account when designing a TDC
controller.
So far, we have only investigated the lower-loop stability which is not sufficient for
the overall stability. In order to investigate the stability of our system, we need to take
the interference into account which is done by once more utilizing Theorem 5. We also
calculate the bounds on the system’s rate of convergence pursuant to Chapter 5. Some
example plots can be found in Chapter 8.
The following observations were made during our investigation:
• Higher controller gains are almost always possible with TDC.
• Bounds on the rate of convergence suggest that TDC converges slower for systems
far away from the border of stability and faster for stability-critical systems. This
behavior could be confirmed by simulation.
• Undercompensation of the delay does not threaten stability, in the worst case, i.e. δε =
−δTDC , the Nyquist curves of h and hTDC are identical.
• Overcompensation of the delay can threaten stability in some cases, e.g. high delay
and/or high gain systems.
• Underestimating the mobile’s gain leads to a growing Nyquist curve and can thus lead
to instability. Note that the curve of the compensated system grows; in cases with
considerable delay this might consequently still be preferable to an uncompensated
system.
• Overestimating the mobile’s gain leads to a shrinking Nyquist curve. This would be

62 6 Time-Delay Compensation
desirable, but the internal stability deteriorates rapidly with growing ∆κI and hence
has to be considered carefully.
6.4.2 Extended TDC
The extended TDC, introduced in Section 6.3, promises delay independent performance.
This comes to the cost of complexity. Its advantages and drawbacks are discussed in this
section.
In an ideal case we have from (6.3) that
h∗TDC =bm
1 + bmd∆fι,
which for the standard case (2.7) with integral control yields
h∗TDC =zκIz−1
1 + zκIz−1
1
zδ∆fι
=zκI
z(κI + 1)− 1
1
zδ∆fι
=
κIκI+1
z − 1κI+1
1
zδ∆−1fι. (6.4)
Apart from known perturbations by the filter dynamics, this obviously has only poles
inside the unit disk and the lower-loop gain is always smaller one for all κI > 0. For
the standard case, the extended TDC has thus restored the DPC property that feasibility
implies stability.
Analogous to the discussion in the last section, we have to consider that the real delay
and gain in the system might not be known exactly. This might indeed have a devas-
tating effect since the base-station controller now is a high-order system itself. Hence,
introduce δ∗ε , the error in the time-delay compensation. We only needed to consider one
uncertainty for the delays since the delays outside the base station (δm and δp) enter the
equations in the same fashion. Furthermore, the base-station delay can in all conscience
be assumed to be locally known.

6.4 Investigation 63
0.0 0.2 0.4 0.6 0.8 1.00.0
0.2
0.4
0.6
0.8
1.0κI,T
DC
κI
δ∗ε = 0δ∗ε = −1δ∗ε = −2
δ∗ε = −3
δ∗ε = −4
δ∗ε = −5
(a) Undercompensated TDC*
0.0 0.2 0.4 0.6 0.8 1.00.0
0.2
0.4
0.6
0.8
1.0
κI,T
DC
κI
δ∗ε = 0
δ∗ε = 1
δ∗ε = 2
δ∗ε = 3δ∗ε = 4
δ∗ε = 5
(b) Overcompensated TDC*
0.0 0.2 0.4 0.6 0.8 1.00.0
0.2
0.4
0.6
0.8
1.0
κI,T
DC
κI
δ∗ε = 0δ∗ε = −1δ∗ε = −2
δ∗ε = −3
δ∗ε = −4
δ∗ε = −5
(c) Undercompensated Stable TDC*
0.0 0.2 0.4 0.6 0.8 1.00.0
0.2
0.4
0.6
0.8
1.0κI,T
DC
κI
δ∗ε = 0
δ∗ε = 1
δ∗ε = 2
δ∗ε = 3
δ∗ε = 4
δ∗ε = 5
(d) Overcompensated Stable TDC*
Figure 6.6: Stability Region of the under-/overcompensated extended TDC DynamicsMatrix
Consider h∗TDC with an I-controller and a delay of δm = δb = 2 as well as δp = 1. The compensator delayδ∗TDC is δb + δm + 2δp + δ∗ε . Thus, we consider undercompensation in the left plots and overcompensationin the right ones. The shaded regions depict the regions of stable h∗TDC . In the lower plots, we took alsothe internal stability of b∗TDC into account.
In Figure 6.6, we plotted the regions where h∗TDC is stable. This is done in dependence of
the error in the assumed delay and gain. In the upper plots, we only consider the stability
of h∗TDC , in the lower plots also the stability of t∗ is taken into account. If one considered
the base station block (δbb∗TDC) as a line of code in the base station, only the stability of
this block has to be considered. Note that those cases are captured in Figure 6.6a and 6.6b.

64 6 Time-Delay Compensation
Despite the complexity of the new controller design, the lower block seems to be relatively
robust to uncertainties in the delay and the mobile’s gain.
Since the lower-loop stability is not sufficient for stability, we move on to the Nyquist
analysis of the considered cases. Moreover, bounds on the rate of convergence are calculated
and compared to time-domain simulations. Some examples with concrete numbers can be
found in Chapter 8. During our tests, the following observations were made:
• The extended TDC shows remarkable stability to a wide range of parameters when
the internal model of the mobile and delay is exact.
• Bounds on the rate of convergence suggest that the extended TDC performs slower
than the traditional TDC. However, time-domain plots show that those bounds might
be conservative for some parameters.
• Undercompensation of the delays does not threaten stability, in the worst case,
i.e. δ∗ε = −δ∗TDC , the Nyquist curves of h and h∗TDC are identical.
• Underestimating the mobile’s gain can lead to instability, just like for the traditional
TDC.
• Overestimating the mobile’s gain may lead to internal instability when found in
combination with overcompensating for the delay. Otherwise, the extended TDC is
relatively robust to overestimation.
If one compares both compensations, huge similarities in the respective behavior can be
found. If there are delays in the base station, the extended TDC outperforms the traditional
TDC significantly. If there is, however, no delay in the base station, the new TDC offers
no advantages.

6.5 Conclusion 65
6.5 Conclusion
In this chapter, we introduced the concept of Time-Delay Compensation, both in the
framework of the time domain and our block diagram. The drawback of not being able
to compensate for base-station-internal delay motivated us to come up with an extended
version of the traditional TDC.
In our investigations, we focused on what happens if one over- or undercompensates
for delays and the mobile’s integrator. It seems that one should always compensate for the
lowest expected delay, since undercompensation does not threaten stability but increases
the maximum feasible delay. Also, the internal stability of our base-station controller has
to be taken into account when choosing the gain of the internal mobile. Furthermore,
the extended TDC seems more robust to an erroneous delay assessment than one would
expect. Some simulations backing our assessment can be found in Chapter 8. Still, we
want to point out that the extended TDC is of theoretical nature and its applicability has
to be checked carefully and problem-specific.
Keep in mind that so far, we have only considered information feedback. The next
chapter will elaborate on methods of investigating binary feedback.

66 6 Time-Delay Compensation

Chapter 7
Describing Functions
One fact that has been neglected thus far is that in the real-world 3G system there is no
information feedback. Instead, the base station just sends one deciding bit which causes an
increase or decrease of the power-output level of the mobile. This provides faster update
rates at the price of precision.
In our framework, the binary feedback corresponds to a sign block after the controller
in the base station. Given that the update rate is sufficiently high, our model should give
a good approximation. If the rate, however, does not suffice, means of handling the non-
linear feedback have to be found. One way of tackling binary feedback is the method of
describing functions.
We will first present the basic idea behind describing functions. Then, we will derive
the system-specific describing function and show how period lengths and amplitudes of
different modes can be predicted. Our results will be backed up by simulations.
In [7], Gunnarson derives the describing-function theory for the lower loop, i.e. the SISO
case. However, he leaves the interference-feedback case open. This chapter is dedicated to
answer the left-open question by capturing the MIMO case locally. In particular, we can
predict and verify that here larger amplitudes can occur than in the SISO case.
67

68 7 Describing Functions
G(z)
f(·)
r e
uy
−
Figure 7.1: Split System
Consider a system which can be split into a linear part G and a nonlinear function y = f(u). The referencevalue r is chosen to be zero for the derivations.
7.1 Idea
We consider systems that can be split into a linear partG and a nonlinear function y = f(u),
see Figure 7.1. The general idea behind the describing-function method is to assume that
those systems show oscillatory behavior, both in the input and the output of the nonlin-
earity. Assuming that the fundamental frequency is dominating and that G has sufficient
low-pass behavior, one then derives, based on first-order Fourier estimation, an approxima-
tion for the system’s nonlinearity. This approximation is called describing function Ψ(u)
and, as the name suggests, will be a function of the assumed oscillation. Thus, if there
exists a solution to the approximated system, the assumed oscillation approximately exists.
Let us derive describing functions in a general framework. We use the following nota-
tion:
ui . . . signal u, i-th component
ui . . . amplitude of signal ui
ui . . . first Fourier coefficient of signal ui
The first discrete-time Fourier coefficient is computed as follows:
ui
(
j2π
N
)
∆=
1
N
N−1∑
t=0
ui[t]e−j 2π
Nt, (7.1)

7.1 Idea 69
where N ∈ N is the number of discrete time steps in one period. Now, assume the
input u to our nonlinearity f to be a n-dimensional vector of sinusoids with the same
frequency ω = 2π/N but possibly differing phase φi, i.e.
ui[t] = ui sin
(2π
N(t+ φi)
)
, i ∈ {1, 2, . . . , n},
where n is the system’s dimension. The first discrete Fourier coefficient of ui[t] is conse-
quently, using (7.1),
ui
(
j2π
N
)
=ui2jej
2πNφi =
ui2ej(
2πNφi−
π2 ). (7.2)
Moreover, the first Fourier coefficients for the output yi[t] of f(ui) has to be computed
case-specific from
yi
(
j2π
N
)
=1
N
N−1∑
t=0
f(ui[t])e−j 2π
Nt.
Finally, the describing function Ψ(u) for the nonlinearity follows from
y = Ψ(u)u. (7.3)
This approximation then replaces the nonlinearity f(·) in the block diagram and thus
allows to write
GΨ(u) = −1, (7.4)
which is frequently rewritten into two separate equations for phase and amplitude, see
e.g. [7, 8]. Note that the solution to (7.4) is a function of ui, φi and N . If solutions exists,
the set of parameters approximately describes possibly existing oscillation in the system.
Oscillations might in general not be desirable, but they necessarily exist for systems
with a sign function, which leads us to the specific usage in our case.

70 7 Describing Functions
7.2 Problem Specific Usage
Fι ∇I Dp
DBB sign Dp DMM
Fς Dp
γ†
ζ
σ
e u c
pι
ς
−
Figure 7.2: Block Diagram with Binary Control
The block diagram for our system as derived in Chapter 2 with an additional sign block to model thebinary control. Here, c = sign(u) is introduced.
In the real-world 3G system there is only binary feedback deciding whether to raise or
to lower the power output of the MS. This is readily included into our block diagram as
sign block resulting in Figure 7.2, which directly maps to Figure 7.1 when considering the
linearized system with positive feedback as well as r = 0. The linear part of our system1,
G, follows from Figure 7.2 as
G = DBM(Fι∇I− Fς),
where D = DBDMD2p. First, we need to check whether this transfer function has low-pass
behavior or not. For this reason, consider the Bode plot of G where we consider integral
control with gain κI = 0.2 and an overall delay of two. Its magnitude plot compared to
a single-pole low-pass filter (pole at 0.8) can be found in Figure 7.3 and shows reasonable
comparability.
In order to find Ψ(u) we first need to compute yi for the case of f = sign(ui). Since
1Note that we are still considering the linearized interference and thus the linearized system.

7.2 Problem Specific Usage 71
10−2 10−1 100−20
0
20
Frequency (rad/s)
Magnitude(d
B)
Figure 7.3: Check of Low-Pass Behavior of g
Here, we compare the Bode plot of a low-pass filter (pole at 0.8, blue) with the Bode plot of g with integralcontrol and gain κI = 0.2 (black). We show the magnitude plot from a typical diagonal element of G, theoff-diagonal elements are cut off at lower frequencies. The plot suggests reasonable low-pass behavior.
its computation is not trivial, we will present the derivation in some detail. During the
course of the derivation we take into account that the sign of a discretized sinus wave,
i.e. the output of our nonlinearity, has an unobservable phase shift. This phase shift will
be called ε and is depicted in Figure 7.4. The observable part of the phase is ⌊φ⌋, where
the lower Gaussian brackets denote the floor operator.
æ
æ
æ
ææ
æ
æ
ææ
æ
-2 0 2 4 6
-1
0
1
timesteps
amplitude
ε
φ
⌊φ⌋
u[t]
c = sign(u[t])
Figure 7.4: Motivation for Introducing ε
We see that only ⌊φ⌋ has an influence on the binary control signal c. The rest of the phase ε is notobservable. We assume εi to be strictly greater than zero in order to avoid hitting the sign function at 0,which would, dependent on the definition of sign(0), lead to asymmetries. Note, however, that those caseswould correspond to an error of 0 and are thus, due to the discrete power levels and their connection viathe interference function, more than unlikely.

72 7 Describing Functions
The computation of the describing function works as follows:
yi
(
j2π
N
)
=1
N
N−1∑
t=0
sign(ui[t])e−j 2π
Nt
=1
N
N−1∑
t=0
sign
(
ui sin
(2π
N(t + φi)
))
e−j2πNt (7.5)
=1
Nej
2πN
⌊φi⌋N−1∑
t′=0
sign
(
sin
(2π
N(t′ + εi)
))
e−j2πNt′ (7.6)
=2
Nej
2πN
⌊φi⌋
N2−1∑
t′=0
e−j2πNt′ (7.7)
=2
Nej
2πN
⌊φi⌋1− e−jπ
1− e−j2πN
(7.8)
=2
Nej
2πN
⌊φi⌋2 e
j πN
2j
ej πN −e−j π
N
2j
(7.9)
=2
N sin(πN
)ej(πN−π
2+ 2π
N⌊φi⌋). (7.10)
Here, we used the following steps:
(7.5)–(7.6): Define t′∆= t + ⌊φi⌋ and εi = φi − ⌊φi⌋. We can see from Figure 7.4 that
only ⌊φi⌋ has an influence on the sign while εi can not be observed. Also utilize the shift
theorem, i.e. take advantage of the periodicity of e−j2πN to sum from zero again.
(7.6)–(7.7): Make use of the sign change in the sinus as well as the exponential term to
sum over only half the period. Note that we implicitly assumed N to be even for N/2− 1
to be an integer. Uneven period lengths in a stable oscillation can be viewed as alternating
even periods2.
(7.7)–(7.8): Use the geometric series∑n
k=0 ak = 1−an+1
1−a, where a = e−j
2πN .
(7.8)–(7.9): Expand with ejπN /2j in order to get exponential representation of the sinus.
2We want to point out that those stable uneven periods could be observed in the system. However, inthe SISO case and for matrices with only real eigenvalues, the even-period conjecture in [7] holds.

7.2 Problem Specific Usage 73
Now, Ψ(u) follows from (7.3), with (7.2) and (7.10), as
Ψ(u)
u12ej(
2πNφ1−
π2 )
...
un2ej(
2πNφn−
π2 )
!=
2
N sin(πN
)
ej(πN−π
2+ 2π
N⌊φ1⌋)
...
ej(πN−π
2+ 2π
N⌊φn⌋)
.
This allows us to define Ψ(u) as follows:
Ψ(u) =4
N sin(πN
)
︸ ︷︷ ︸
∆=ψ
diag
(
ej(πN− 2π
Nεi)
ui
)
︸ ︷︷ ︸
∆=D
. (7.11)
Furthermore, we know that
GΨ(u)u!= u,
and thus directly that
λi(GΨ(u))!= 1, for some i. (7.12)
Note that the describing function is indeed only a function of ui, εi and N , not of ⌊φ⌋.
Utilizing the mainly diagonal structure of the linear part and assuming the filters to be
equal we get
G = DBM(Fι∇I− Fς) = dbmf︸ ︷︷ ︸
∆=g
(∇I− I),
which, combined with (7.11) and (7.12), yields
λi ((∇I− I)D)!=
1
gψ, for some i. (7.13)
We have thus found a system of equations which can be solved for N and ui and con-
sequently yields the period lengths and amplitudes of possible oscillations. The non-
observable εi ∈ (0, 1) can be seen as tuning parameter. However, finding solutions
to (7.13) is still computational expensive.

74 7 Describing Functions
Suppose we model the mobile as an integrator with gain κI . Then, the power output
of the mobile p is an integrated square wave (see Figure 7.4), i.e. a discrete triangle wave.
Taking into account that our assumption of equal frequency ω implicitly introduced the
assumption that all amplitudes ui are equal, we know that the real amplitude of the power-
output oscillation is ˆu = κI4N .
Furthermore, the describing function (7.11) involves a phase shift of πN−2 π
Nεi. Since εi ∈
(0, 1) this phase shift could be relatively big. Supposing that the phase shift due to the
sign block is only marginal, we take εi ≈12.3 Knowing that those changes both make an
approximate analysis even more approximate, we conclude the following rule of thumb:
Rule of Thumb 2. Suppose there exists an approximate solution to
1
λi(Γ†F )
!=
gΨ
1 + gΨ, (7.14)
for some i, where the approximate describing function Ψ is defined as
Ψ∆=
4
uN sin(πN
) .
Then, there exists a triangular steady-state oscillation in the power output of the mobiles
with period N and amplitude κI4N .
Note that we could split the lower-loop dynamics from the interference feedback, just like
in Chapter 4. Furthermore, we used Theorem 2 to substitute λi(∇I) with λi(Γ†F ).
We can now plot the reciprocal eigenvalues of the feasibility matrix and check for
every N if the right-hand side of (7.14) hits one of them for varying u. The exact value
of u is of no importance, since the emerging solution is sufficiently described by the period
length N . Obviously, multiple solutions are possible. In the next section, we will consider
some examples and compare our approximate predictions with time-domain plots of the
system with binary feedback.
3In [7] the unobservable phase shift was fixed to be exactly 0.5. This was necessary due to the one-dimensionality and the integer nature of the solution of a discretized problem.

7.3 Investigation 75
7.3 Investigation
In this section, we will consider a three-user network that has a feasibility matrix with
conjugate-complex reciprocal eigenvalues. We will predict and verify different steady-state
oscillations for that network, showing that even though approximative, the describing
function analysis can give valuable insight into the system’s steady-state dynamics.
Consider the following gain matrix
G3∆=
1 0.055 0.001
0.001 1 0.055
0.055 0.001 1
.
For a target SIR and receiver noise of γ†i = σi = 10 this yields the following reciprocal
feasibility-matrix eigenvalues:
λ(Γ†F3)−1 = {0.56,−0.28 + j0.47,−0.28− j0.47}.
As investigated controller, we chose the standard case (2.8) with an overall delay δ of 4
and gain κI of 0.5. The plot of Rule of Thumb 2 then yields Figure 7.5. Here, we see that
for N = {11.5, 14, 18} the Nyquist curve of right-hand side of (7.14) approximately hits
one of the reciprocal eigenvalues of Γ†F3. Naturally, N = 11.5 can not be obtained, since
the period length has to be an even integer. However, alternations of N = 10 and N = 12
can lead for example to a period length of N ≈ 11.33. In fact, we could find stable modes
with alternating 10 and 12, 10 and two times 12, and only 12 (last mode not shown). This
once more shows the approximate nature of this analysis. It should also be mentioned that
the vast majority of all initial condition led to the 18 mode. This observation is consistent
for all gains and delays we checked. Most interestingly, the mode Gunnarsson found for
SISO systems (N = 2 + 4n, where n is δ − 1 see [7]) still exists for the MIMO case and
can be obtained by initializing all mobiles approximately synchronous or anti-synchronous.
The simulations, obtained by using different initial conditions, can be found in Figure 7.6.

76 7 Describing Functions
æ
æ
æ
-2 -1 0 1 2
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
Re
Im
N = 11.5
N = 14
N = 18
Figure 7.5: Test of Rule of Thumb 2The reciprocal eigenvalues of Γ†F3 are depicted in red, the Nyquist plot of the system in blue. Each linerepresents one N for varying u. Approximate hits can be obtained for N = {11.5, 14, 18}. Note that thederivations of the harmonic balance are only valid for even N . Only to show the hit between 10 and 12the case N = 11.5 was plotted.
60 80 100 120 140
22
24
26
t
pi[t]
(a) Period Length of 11
60 80 100 120 140
22
24
26
t
pi[t]
(b) Period Length of 11.33
60 80 100 120 140
22
24
26
t
pi[t]
(c) Period Length of 14
60 80 100 120 140
22
24
26
t
pi[t]
(d) Period Length of 18
Figure 7.6: Time-Domain Plots of System with Binary FeedbackHere, the predicted modes from Figure 7.5 were obtained by using different initial conditions for thethree mobiles. We highlight one mobile by drawing the output powers of the other mobiles only dotted.They, however, always show identical behavior, which backs our homogeneity assumption which allowedfor using Ψ. Especially note the odd periods in the upper plots. Furthermore, we want to mention thatmost initial conditions lead to N = 18, which has indeed a bigger amplitude than the mode N = 14, whichwas predicted in [7].

7.4 Conclusions 77
7.4 Conclusions
In order to to make a better model of the 3G system, we introduced binary feedback.
Consequently, the steady state of our system became a steady-state oscillation. Describing
functions were introduced in order to describe those oscillations. Here, we successfully
answered the left-open question of the MIMO case in [7].
Taking the interference into account led to further possible oscillations. Note that
shorter as well as longer possible periods could be found. We then tested our predictions
by simulation. Here, all predicted modes could be found.
Even though the describing-functions analysis is very approximative, relatively good
predictions of the emerging steady-state oscillations could be made. Most noteworthy,
we could show that larger amplitudes than those found in the SISO analysis may occur.
Moreover, simulations suggest that the largest mode is most likely to occur. This might
proof useful if one e.g. wants to make sure that a certain minimum Signal-to-Interference
Ratio is obtained.

78 7 Describing Functions

Chapter 8
Simulations
During the course of this thesis, we frequently used both Nyquist and time-domain plots.
The former were generated with self-written Mathematica routines. The latter were
created with a Matlab/Simulink model of Figure 2.3b, also built for this thesis. The
model is capable of simulating disturbances like changing G matrices and command errors.
Both were not explicitly taken into account in our analysis. However, simulations show
that our local analysis gives good insight into the systems behavior.
In this chapter, we give some intuition into the considered system’s response to changes
in the connectivity, portrait by the gain matrix G, and the lower-loop dynamics h, in
particular adding a Time-Delay Compensation. Furthermore, we will compare stability
results for the system with and without information feedback. Lastly, we will add some
simulations of systems with varying G in order to consolidate our results.
8.1 Influence of the Gain Matrix
In this section, we will investigate the influence of the gain matrix to our system. The
gain matrix G portrays the connectivity of a network. The diagonal elements depict the
channel attenuation while the off-diagonal elements represent the amount of cross-channel
interference.
We will base our investigation on a network without channel attenuation and with
79

80 8 Simulations
arbitrarily chosen cross-channel gains of 0.025. The basic network will then be perturbed
by a parameter ε. This parameter will be varied in position and value to illuminate
the influence of differently-structured gain matrices on system feasibility and stability.
The former can be investigated with the help of Γ†Fi and (4.3) only, the latter only in
combination with the dynamics h, which will be dealt with in the subsequent section.
The investigated gain matrices are
GSym =
1.000 ε ε
ε 1.000 ε
ε ε 1.000
GBlk =
1.000 ε 0.025
ε 1.000 0.025
0.025 0.025 1.000
GAsy =
1.000 ε ε
0.025 1.000 ε
0.025 0.025 1.000
GRnd =
1.000 ε 0.025
0.025 1.000 ε
ε 0.025 1.000
GOne =
1.000 ε 0.025
0.025 1.000 0.025
0.025 0.025 1.000
GAtt =
1.000 0.025 0.025
0.025 1.000 0.025
0.025 0.025 1− ε
We begin by considering symmetrical cases, namely GSym, where all cross-channel gains are
raised, and GBlk, where two mobiles increasingly interfere each other. Second, we consider
asymmetric cases. There, we have GAsy, where the upper triangular matrix is perturbed,
and GRnd, where the interference is augmented in a round-robin fashion. The last two cases
capture increasing interference from one mobile to one other mobile (GOne) and growing
attenuation (GAtt).
Before we move on to plotting the eigenvalues of the corresponding feasibility matrices,
we first have to calculate their respective feasibility regions, which are functions of ε.
Table 8.1 shows the maximal feasible ε, evaluated by both the of Rule of Thumb 1 (εappx)
and actual calculus (εcalc), cf. Section 3.2. The error factor in the right column is computed
simply by dividing the maximal approximated through the maximal actual ε. One can see
that the rule of thumb is getting ever more conservative with growing inhomogeneity of the

8.1 Influence of the Gain Matrix 81
Table 8.1: Comparison between the Approximated and the Actual Feasibility Region
Influence (G) max εcalc max εappx error factor
Symmetric (GSym) 0.050 0.050 1Round robin (GRnd) 0.075 0.075 1Block form (GBlk) 0.088 0.075 1.2Attenuation (GAtt) 0.833 0.500 1.7Asymmetric (GAsy) 0.095 0.050 1.9One entry (GOne) 0.275 0.075 3.7
gain matrix G. This was to be expected considering the rule was based on Gerschgorin’s
disks.
Plotting the reciprocal eigenvalues of the feasibility matrices for all six considered cases
gives Figure 8.1. Here, we can see that the biggest always-positive simple eigenvalue is
approaching the unit circle for ε → εmax. This was already known from the Perron-
Frobenius theorem (see Section 3.2). Unknown, however, were the whereabouts of the
smaller eigenvalues. We will use the condensed plot Figure 8.1g to show stability for all
six considered classes of networks in the subsequent section. Note that those are just
arbitrary examples. For a more rigorous discussion on the position of the eigenvalues of
the feasibility matrix Γ†F see [9]. There, we used the specific structure of Γ†F as well as
Perron-Frobenius and Gerschgorin results to find bounds on λ(Γ†F )−1 for whole classes of
networks. Since the examples here have known G, we compute the λi(Γ†Fj)
−1 directly.
Note that the analysis in this section is done without taking the auto-interference α into
account. The reason for this is that with growing α the region of feasible ε shrinks rapidly.
That alone does not influence the analysis at all. The side effect of decreasing the maximal
feasible cross-channel gains, however, is that the biggest eigenvalue increasingly dominates
in the sense that it grows, at least relative to the other eigenvalues. Consequently, the
reciprocals of the other relatively small eigenvalues threaten stability ever less.

82 8 Simulations
-6 -4 -2 0 2-2
-1
0
1
2
Im
Re
(a) Inverse eigenvalues of Γ†FSym
-6 -4 -2 0 2-2
-1
0
1
2
Im
Re
(b) Inverse eigenvalues of Γ†FBlk
-6 -4 -2 0 2-2
-1
0
1
2
Im
Re
(c) Inverse eigenvalues of Γ†FAsy
-6 -4 -2 0 2-2
-1
0
1
2
Im
Re
(d) Inverse eigenvalues of Γ†FRnd
-6 -4 -2 0 2-2
-1
0
1
2
Im
Re
(e) Inverse eigenvalues of Γ†FOne
-6 -4 -2 0 2-2
-1
0
1
2
Im
Re
(f) Inverse eigenvalues of Γ†FAtt
-4 -3 -2 -1 0 1 2-1.0
-0.5
0.0
0.5
1.0
Im
Re
(g) Case for later investigation: Γ†FBlk,Asy with ε = 0.08
Figure 8.1: Feasible Reciprocal Eigenvalues of Γ†FiFigures (a)–(f) show the development of the inverse eigenvalues of the feasibility matrices of the consideredcases for ε ∈ [0, εcalc) (see Table 8.1). The biggest eigenvalues are always simple and real (known fromPerron-Frobenius) and approach the unit circle on the positive real axis. The last figure shows the casewe will simulate later on. Here, we took λ(Γ†FBlk)
−1 (red) and λ(Γ†FAsy)−1 (blue) for ε = 0.08.

8.2 Influence of the Dynamics Matrix 83
8.2 Influence of the Dynamics Matrix
In order to simplify our analysis we condensed the lower loop of our system into the
dynamics block H in Chapter 2. This block includes the controller in the base station and
the mobile (B and M) as well as filters (Fς and Fι) and delays (D). Our investigation in
this section will show the influence of growing controller gains, delays and filtering.
As point of departure, we use (2.7) with low-gain integral control (κI = 0.2) and two
samples delay (δ = 2). The transfer function of this basic case is
hbase(z) =0.2
z2 − z + 0.2.
We will assume that there is always an integrator in the system. This leads to the maximal
eigenvalue of Γ†Fi being of no concern, when only considering feasible systems. The recip-
rocal of the maximal eigenvalue of the feasibility matrix always approaches the point (1, 0)
on the positive real axis. The Nyquist plot of h(z), however, is always exactly 1 for ω → 0.
This can simply be shown by including any controller with integral action into (2.6)
h(z) =mbfι
zδ +mbfς
=( bz−1
+ a)fι
zδ + ( bz−1
+ a)fς
=(b+ (z − 1)a)fι
zδ(z − 1) + (b+ (z − 1)a)fς,
where b and a are arbitrary polynomials in z; of course chosen such that the integrator
term is not canceled. Using z = eiω and assuming f(1) = 1 we get for ω → 0 that
h(1) =(b+ 0 · a)fι(1)
zδ · 0 + (b+ 0 · a)fς(1)=b
b= 1.
We now move on to investigating the influence of different choices of parameters.

84 8 Simulations
8.2.1 Changing the Integrator Gain
Let us first visualize the influence of a growing integrator gain. Figure 8.2 shows the
Nyquist plot of h(z) for gains κI from 0.2 to 0.8; the overall delay δ is always two. All
considered gains lead to a stable lower loop, see Figure 4.3. The plots show that the
Nyquist curve expands in a non-linear fashion when κI increases. Hence, we can conclude
different maximal cross-channel gains ε in dependence of the network configurations G and
the controller gains κI . The maximal stable gains will be considered in more detail later
in this section.
Note that the Nyquist plots always traverse through the point (1,0) and thus infeasible
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(a) κI = 0.2, δ = 2
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(b) κI = 0.4, δ = 2
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(c) κI = 0.6, δ = 2
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(d) κI = 0.8, δ = 2
Figure 8.2: Investigation of Increasing Integrator Gain κIFigures (a)–(d) combine Figure 8.1g (red, blue) with the Nyquist plot of hi (black). The unit circle is addeddashed. We see that increasing gain leads to a growing Nyquist curve. Eventually, there are encirclementsof the reciprocal poles of the considered networks. For Figure 8.2c we predict a stable red and unstableblue system. A time-domain plot using the same color conventions can be found in Figure 8.3.

8.2 Influence of the Dynamics Matrix 85
systems are always unstable. Remember that in the case of the simple DPC algorithm,
both the feasibility and the stability condition coincided. However, as soon as one considers
more delays, the conditions diverge and the feasibility condition becomes only necessary
and is not sufficient for stability anymore.
Note, furthermore, that our time-domain plots in Figure 8.3 confirm the results of our
Nyquist analysis. Here, we show for the same controller parameter and initial conditions
the trajectories of the power outputs of all three mobiles for two networks, GAsy and GBlk.
As predicted, one network leads to instability while the other converges to its steady state.
0 20 40 60
30
40
50
t
pi[t]
(a) GBlk
0 20 40 60
30
40
50
t
pi[t]
(b) GAsy
Figure 8.3: Time-Domain Plot of Figure 8.2c
Corresponding to the frequency-domain plot in Figure 8.2 we used GBlk (red) and GAsy (blue) withε = 0.08 such that reciprocal eigenvalues without and with encirclements emerge. While the blue network(no encirclements) is stable, the red (two encirclements) is not. The time-domain simulation thus showsexactly the predicted behavior.

86 8 Simulations
8.2.2 Changing the Overall Delay
A factor that has a major effect on the networks performance is the overall delay δ. Using
a constant gain of κI = 0.2 and increasing the delay δ from two to six gives Figure 8.4.
Again, one should check the stability of the lower loops first; in this case the lower loop
is always stable (see Figure 4.3). Pursuant to the plots below, increasing delay seems to
have a more linear influence on the growth of the Nyquist curve than the increase in the
integrator gain. A big difference is, though, that each delay adds another encirclement of
the origin.
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(a) κI = 0.2, δ = 2
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(b) κI = 0.2, δ = 4
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(c) κI = 0.2, δ = 5
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(d) κI = 0.2, δ = 6
Figure 8.4: Investigation of Increasing Overall Delay δ
Here, again originating from hbase, increasing overall delays δ are considered. The reciprocal eigenvaluesof Γ†FAsy and Γ†FBlk are shown in blue and red, respectively. The Nyquist curve (black) grows withincreasing δ. Every delay adds an encirclement of the origin. Eventually, the border of stability is crossed.A time-domain plot of Figure 8.4c is given on the next page.

8.2 Influence of the Dynamics Matrix 87
Figure 8.5 shows two networks, GBlk and GAsy, with the same controller and an overall
delay of five. The trajectories of the first network slowly diverge from the steady state
while in the second case, slow convergence can be observed. This time-domain plot, again,
validates our predictions. Just as one would expect, more delay leads to longer oscillation
periods. Consequently, the rate of convergence is relatively slow. We will see later on that
this effect can be mitigated by compensating for the delay.
0 20 40 60
30
40
50
t
pi[t]
(a) GBlk
0 20 40 60
30
40
50
t
pi[t]
(b) GAsy
Figure 8.5: Time-Domain Plot of Figure 8.4c
Corresponding to the frequency-domain plot in Figure 8.4 we use GBlk (red) and GAsy (blue) with ε = 0.08such that reciprocal eigenvalues without and with encirclements emerged. While the blue network (noencirclements) is still stable, the red network (two encirclements) is not. Note that convergence for high-delay networks is relatively slow. The time-domain simulation thus shows exactly the predicted behavior.

88 8 Simulations
8.2.3 Adding a Proportional Part
The use of a PI- rather than an I-controller gives
hPI(z) =z(κI + κP )− κP
zδ(z − 1) + z(κI + κP )− κP.
Its plot can be found in Figure 8.6. For the sake of this illustration we used a proportional
part up to κP = 0.6. The integrator gain always remained at κI = 0.2. All investigated
lower loops are stable, see Figure 4.3.
Characteristic for the P part is the expansion of the inner encirclements rather than
the outer ones. Also, a left shift of the encirclements’ center can be observed. This holds
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(a) κP = 0.2, κI = 0.2, δ = 2
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(b) κP = 0.3, κI = 0.2, δ = 2
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(c) κP = 0.5, κI = 0.2, δ = 2
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(d) κP = 0.6, κI = 0.2, δ = 2
Figure 8.6: Investigation of Additional Proportional Part κPHere, a proportional part is added to the controller of hbase, its Nyquist plot is given in black. Thereciprocal eigenvalues of Γ†FAsy and Γ†FBlk are shown in blue and red, respectively. The proportionalpart leads to an expansion and a left shift of the innermost encirclement. A time-domain plot of Figure 8.6cis given on the next page.

8.2 Influence of the Dynamics Matrix 89
true for increasing δ.
Especially the left shift can be seen as a major disadvantage of the PI controller since
the stability-critical reciprocal eigenvalues typically approach the Nyquist plot from the
left. Another disadvantage of PI-control in our particular case is that it is not realizable
with binary feedback. Thus it will be disregarded for most parts in the later analysis. In
the information feedback layout it also seldom contributed positively – only for a small set
of parameters the proportional part is stabilizing.
In Figure 8.7 we can see the influence of the proportional part in the time-domain. As
expected, the stepsize grows with κP . This should lead to a faster convergence of systems
far away from pss. The danger of the bigger steps is that there will be overcompensation
for small errors and thus prolonged oscillations may occur. This might even destabilize the
system, which is the case for the red plot below.
0 20 40 60
30
40
50
t
pi[t]
(a) GBlk
0 20 40 60
30
40
50
t
pi[t]
(b) GAsy
Figure 8.7: Time-Domain Plot of Figure 8.6c
Corresponding to the frequency-domain plot in Figure 8.6, we used GBlk (red) and GAsy (blue) withε = 0.08 such that reciprocal eigenvalues without and with encirclements emerge. While the blue network(no encirclements) is stable, the red (two encirclements) is not. The time-domain simulation thus showsexactly the predicted behavior.

90 8 Simulations
8.2.4 Adding Filters
In order to deliver insight into the effect of filtering, we plot the Nyquist curves in Figure 8.8.
We use the exponential-forgetting and the local-average filter, both were introduced in
Section 2.3.2. The parameters were chosen such that three to five samples were considered
by both the forgetting and the averaging filter. For better comparability, the unfiltered
system was also plotted. Since the filter’s influence on the Nyquist curve is rather small,
we show all plots of one filter in one figure.
We can see that filtering leads to an expansion of on the Nyquist curve. The more
samples are considered, the larger the growth. We see that the local-average filter has a
bigger effect than the exponential forgetting filter. Since both filters fulfill f(1) = 1, our
derivations in 8.2.1 hold and only non-maximal eigenvalues threaten stability. Moreover,
filtering the signal has a bigger influence than filtering the interference. This was clear
from the relative gains of the upper and lower loop.
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(a) Fi = fef , κI = 0.2, δ = 2
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(b) Fi = fla, κI = 0.2, δ = 2
Figure 8.8: Investigation of the Influence of Filtering
Comparison between the exponential-forgetting filter (Figure 8.8a) and the local-average filter (Fig-ure 8.8b). The smallest curve always corresponds to the unfiltered system; then three to five samplesare considered by the filters, leading to growing Nyquist plots. We see, however, that the influence offiltering is only slight and that the biggest eigenvalue stays outside the Nyquist curve.

8.2 Influence of the Dynamics Matrix 91
8.2.5 An Interesting Observation
The following observation was made during the course of our investigations. There seems
to be a linear relationship between the stability regions of the lower loop and those of
the whole system, including the interference. As a small example consider Table 8.2. For
consistency with the rest of the chapter we took the examples of GAsy and GBlk and a
delay from two to six. The regions of stability for the lower loop are depicted in Figure 4.3.
The stability for the MIMO system was investigated with Theorem 5. We see that the
maximal stable κI can be deduced for all delays δ when it is known for one δ. Note that,
for notational convenience, we denoted δ = i with δi and rounded all gains to two digits in
the table below.
Table 8.2: Maximal κI for different Systems
δ2 δ3 (δ3 : δ2) δ4 (δ4 : δ2) δ5 (δ5 : δ2) δ6 (δ6 : δ2)
h 1 0.62 (0.62) 0.44 (0.44) 0.35 (0.35) 0.28 (0.28)hGAsy
0.64 0.39 (0.62) 0.28 (0.44) 0.22 (0.35) 0.18 (0.28)
hGBlk0.55 0.34 (0.62) 0.24 (0.44) 0.19 (0.35) 0.16 (0.28)
This observation is solely of heuristic nature and thus in need of solid proving. Unfor-
tunately, this task has to be handed to the next researcher due to the time constraints of
a Master’s thesis.

92 8 Simulations
8.3 Influence of Time-Delay Compensation
Here, we will show the advantages of implementing TDC in our system as well as its
drawbacks. The focus, however, will lie on the effect of errors in the internal model of the
TDC.
8.3.1 Under- and Overcompensating the Delay
One thing that we assume to be not precisely known in the base station is the overall delay.
It might even be variable. Since we do not have any means of measuring the delay in real
time, the TDC has to be designed with a compensation that actually benefits the systems
performance for all expected delays.
Consider the example from Chapter 6. There we assumed a total delay of six samples,
two per controller and one per propagation. This might be extremely high for the 3G
system but more delays make it easier to showcase the benefit of compensating for it.
Furthermore, wireless communication with higher update rates or cheaper hardware might
experience delays in this magnitude.
Figure 8.9 gives some insight into under- and overcompensation. Both the classical
and the extended TDC are drawn in each plot. In the first plots, where there is only
slight under/overcompensation, also the uncompensated system is drawn. We see that
with growing error δε the Nyquist plots of both the traditional and the extended TDC
grow. We also see that for undercompensation, the worst case equals the uncompensated
case. Furthermore, we see that the extended TDC is more robust to errors in the delay
than the traditional TDC.

8.3 Influence of Time-Delay Compensation 93
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(a) δε = −1, δ∗ε = −1
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(b) δε = +1, δ∗ε = +1
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(c) δε = −3, δ∗ε = −3
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(d) δε = +3, δ∗ε = +3
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(e) δε = −4, δ∗ε = −6
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(f) δε = +4, δ∗ε = +6
Figure 8.9: Nyquist plot of Under and Overcompensation by TDC
Figure (a)–(f) show the reciprocal eigenvalues of the considered systems’ interference in red and blue. Allplots also feature the unit circle, plotted dashed. The uncompensated system is only given in the firstrow (black). We compare the behavior of the traditional TDC (lila) and the extended TDC (green) withrespect to under/overcompensation. The errors are given below the plots. Here, the star denotes theerror in the extended TDC. Note especially Figure 8.9e where the compensated systems as well as theuncompensated coincide.

94 8 Simulations
8.3.2 Under- and Overestimating the Gain
The next source of errors in the compensation is under- or overestimation of the mobiles’
gains. This might happen when user use different update-laws which might not be exactly
known in the base station. We, again, consider the example system from Chapter 6. The
gain in the mobiles’ controller is assumed to be κI = 0.2. A higher gain would benefit the
rate of convergence but also lead to instability in an uncompensated high-delay network.
Intuition on the effect of under and overestimation can be found in Figure 8.11. Again,
both the classical and the extended TDC are plotted in comparison. We see that underes-
timating the mobile’s gain leads to a growth of the Nyquist curve for both compensators.
Most interestingly, the opposite effect can be observed when considering overestimation.
Since smaller curves are desirable, so seems to be overestimation. Note, however, that at
some point this error threatens the internal stability of the base-station controller. This
can be observed in Figure 8.11f as well as a time-domain simulation (Figure 8.10). For the
regions of internal stability, cf. Chapter 6.
0 20 40 60 80 100 120 140 160 180
25
30
35
t
pi[t]
Figure 8.10: Time-Domain Plot of Figure 8.11f
Note that no conclusions can be drawn from Figure 8.11f since the lila plot is based on an internally-unstable base-station controller. We see that the extended TDC converges slowly to the steady state whilethe internally-unstable traditional TDC does not. The time-domain plot thus shows exactly the predictedbehavior.

8.3 Influence of Time-Delay Compensation 95
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(a) ∆κI = −0.05
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(b) ∆κI = +0.05
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(c) ∆κI = −0.10
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(d) ∆κI = +0.20
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(e) ∆κI = −0.15
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(f) ∆κI = +0.30
Figure 8.11: Nyquist plot of Under and Overestimation by TDC
Figure (a)–(f) show the reciprocal eigenvalues of the considered systems’ interference in red and blue. Allplots also feature the unit circle, plotted dashed. The uncompensated system is only given in the firstrow (black). We compare the behavior of the traditional TDC (lila) and the extended TDC (green) withrespect to under/overestimating κI . The errors are given below the plots. Note especially Figure 8.11fwhere the traditional TDC gets internally unstable.

96 8 Simulations
8.3.3 Rule of Thumb
While investigating the effects of the Time-Delay Compensation we made the following
observation: it is preferable to undercompensate in contrast to overcompensate for delays.
Furthermore, the opposite holds for the estimation of the mobiles’ integrator gains. Thus,
we conclude the following rule of thumb:
Rule of Thumb 3. When implementing Time-Delay Compensation, always compensate
for the lowest assumed-possible delay and the highest assumed-possible gain that leads to
an internally stable controller for improved stability.
As an example, consider once more the example from the last section with a com-
pensation for only half the delay and overestimation the mobiles’ by 100%, i.e. δε = −3
and κI,TDC = 0.4. Even though the considered errors where vast, the Nyquist plot sug-
gests stability, which could be backed up by simulations. Note, though, that for delay-
compensated systems higher gains in the mobiles are possible. For example, doubling the
mobiles gains and assuming we make the same errors, we still get a stable system – at least
for an extended TDC (for both observations see Figure 8.12).
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(a) δε = −3, ∆κI = +0.2
-4 -3 -2 -1 0 1 2-2
-1
0
1
2
Im
Re
(b) Same with κI = 0.4
Figure 8.12: Additional TDC examples
In both plots we see the Nyquist curves of the traditional TDC (lila) and the extended TDC (green), theunit circle (black, dashed) and the reciprocal eigenvalues of two considered linearized interferences. Theleft plot showcases the stability against sizable errors in the internal model of the TDC:s; the right plotdoubles the mobiles gain while having the same errors. We see that the extended TDC allows for highergains even though errors of 50% were made for both model parameters.

8.4 Influence of Binary Feedback 97
8.4 Influence of Binary Feedback
So far, we have just considered information feedback in our simulations. Adding binary
feedback to our block diagram leads to Figure 7.2 which is readily included into our
Simulink model. Note, however, that the sign of 0 has to be defined manually to ei-
ther plus or minus 1 since we only have a binary signal c which leads to an increase or
decrease in the mobile’s power output. This is no inconvenience, though, since an error of
zero is virtually impossible to achieve with binary feedback.
The assumption of information feedback can be seen as a linearization of the sign
function. Consequently, the obtained stability results only hold locally for binary feedback.
In general, good mapping is given for high update rates and small step sizes/integrator
gains in the mobile.
In Figure 8.13, we show three possible cases. First, a rather good approximation where
both, the information and the binary feedback have similar trajectories up to the point
where the binary feedback converges to its steady-state oscillation while the information
feedback converges to the actual steady state. Second, a case where we predicted instability,
but the binary feedback indeed stabilizes our system. We could also construct the inverse,
a case where the binary feedback destabilizes the system. This, however, was only possible
by having a certain stepsize for the binary feedback. As a fourth plot we present an
observation we frequently made when simulating binary feedback. Here, the steady-state
oscillation of the output powers is below the expected pss. The reason for this gets clear
when considering the SIR instead of the powers. Keep in mind that a small increase in the
target SIR leads to a sizable increase in the steady-state powers due to their non-linear
relationship. Thus, there exist oscillations of the SIR around a γ < γ†. Those oscillations
are stable even though our controller reference is γ†. The reason for this is the rough
discretization and high minimal stepsize entailed by the binary feedback. Note that in
those cases, the actual SIR is more often than not below the target SIR. This has to be
taken into account when deciding on the target SIR. In the information case it may be the
minimal SIR leading to sufficient quality of service. Introducing binary feedback leads to

98 8 Simulations
a target SIR that has to be significantly above that.
The reason for the binary feedback often being stable, even though the linearization
constitutes the opposite, is the following. In the information feedback, we basically feed
back the error. If the error grows, so does the input to our integrator. Consequently, it
happens easily that we leave the region of stability. In the binary case, however, we only
increment or decrement the mobiles powers by a fixed number. To include this into the
linearization would mean to have a variable gain, κvarI,i [t] = κI/ei[t]. This gets obvious from
the following small example:
Consider a case where the controller error ei is large, e.g. 6. With information feedback
and gain κI = 0.5 we have a variation in the power output of 3. The binary feedback this
variation is always κI = 0.5 and thus less likely to leave the region of stability. A drawback,
however, is that for small errors the same stepsize holds and thus near the steady state it
is more dangerous to use binary feedback than information feedback.
0 20 40 60 80 100
30
40
50
t
pi[t]
(a) Unexpected Stability
0 20 40 60 80 100
40
60
t
pi[t]
(b) Unexpected Instability
0 10 20 30 40 5022
23
24
25
t
pi[t]
(c) Good Approximation
0 10 20 30 40 5028
30
32
34
t
pi[t]
(d) Unexpected Lower SIR
Figure 8.13: Information versus Binary Feedback
We plot the trajectories of the system with binary feedback in blue, the one with information feedback inred. The steady states are given in black, dashed. We show the following three possible cases: Instabilityof the binary system even though the Nyquist analysis predicted stability, stability even though instabilitywas predicted and good tracking. Additionally, in Figure 8.13d, we show a common feature with binaryfeedback, oscillation around a lower SIR.

8.5 Influence of Varying the Gain Matrix 99
8.5 Influence of Varying the Gain Matrix
In order to show in how far our results – which where all based on having a fixed G – hold
for a system with varying gain matrix we show the following plots where we consider two
systems. In Figure 8.14, we investigate an overall delay of 2, where δb = 1 and δm = 1 and
compare different base-station controllers. In Figure 8.15, we compare the performance of
the two considered TDC:s on a system with an overall delay of 6, where δb = δm = 2 and
δp = 1. Lastly, we compare binary feedback to information feedback in Figure 8.16. The
gain of the mobile is 0.6, if not mentioned otherwise.
In all plots we show the output powers (dotted) as well as the resulting SIR (solid). The
gain matrix is initialized having a mean value of 0.8 on the diagonal and 0.025 for all other
entries. The random values are drawn uniformly with a deviation of 0.2 on the diagonal
and 0.02 for all other entries. The target SIR and noise is fixed to be γ†i = σi = 10.
Generally, we can state the following: Our predictions, which where solely based on the
linearization around the steady state, map adequately to the non-linear case. The TDC
improves the system’s stability to the cost of rate of convergence when far away from the
steady state. However, once near the – here varying – steady state, better performance can
be observed. Also, higher gains are possible (stable) but do not drastically improve the
rate of convergence (not shown). The extended TDC outperforms the traditional TDC if
there are delays in the base station. When considering binary feedback, slower convergence
far away from the steady state and oscillation in the steady state can be observed. Note,
however, that due to a rapidly changing steady state, the behavior of information feedback
is comparable to the behavior of the binary feedback.

100 8 Simulations
0 10 20 30 40 50 60 70 80 90 100
10
20
30
t
γ[t],pi[t]
No TDC (17.568)
TDC (14.8358)
(a) No Compensation vs. TDC
0 10 20 30 40 50 60 70 80 90 100
10
20
30
t
γ[t],pi[t]
No TDC (17.568)
TDC* (14.4922)
(b) No Compensation vs. TDC*
Figure 8.14: Investigating TDC for a Changing Gain Matrix (low delay)
Here we compare the performance of uncompensated, traditional and extended TDC for δb = 1, δm =1, δp = 0 and κI = 0.6. We plot both the output powers (dotted) and the emerging SIR (solid). Addition-ally, the target SIR of 10 is given by a black line. For better comparability we compute the root-mean-squareerror of the SIR for 200 timesteps (in parenthesis). We see that the faster slope of the uncompensatedcase leads to overshot and thus to worse performance once in a region around the varying steady state.

8.5 Influence of Varying the Gain Matrix 101
0 10 20 30 40 50 60 70 80 90 100
10
20
30
t
γ[t],pi[t]
TDC (27.3817)
TDC* (16.0693)
(a) TDC vs. TDC* (no error)
0 10 20 30 40 50 60 70 80 90 100
10
20
30
t
γ[t],pi[t]
TDC (24.8746)
TDC* (16.9294)
(b) TDC vs. TDC* (high error)
Figure 8.15: Investigating TDC for a Changing Gain Matrix (high delay)
Here we compare the performance of traditional and extended TDC for δb = 2, δm = 2, δp = 1 and κI = 0.6in the upper and κI = 0.35 in the lower plot. The lower plot also includes the following prediction errors:δε = −3, ∆κI = 0.35. We plot both the output powers (dotted) and the emerging SIR (solid). Additionally,the target SIR of 10 is given by a black line. For better comparability we compute the root-mean-squareerror of the SIR for 200 timesteps (in parenthesis). In the upper plot we can observe what looks likemarginal stability for the traditional TDC due to the high delay. Consequently, when also introducingerrors in the TDC in the lower plot, we lowered the mobile’s gains to stabilize the TDC. Note that theextended TDC has no issues with the higher gain since it compensates for 2 delays more.

102 8 Simulations
0 10 20 30 40 50 60 70 80 90 100
10
20
30
t
γ[t],pi[t]
Information Feedack (17.568)
Binary Feedback (18.9967)
(a) Information Feedback vs. Binary Feedback (low delay
0 10 20 30 40 50 60 70 80 90 100
10
20
30
t
γ[t],pi[t]
Information Feedback (25.1996)
Binary Feedback (22.6442)
(b) Information Feedback vs. Binary Feedback (high delay)
Figure 8.16: Investigating Binary Feedback for a Changing Gain Matrix
Here we compare the performance of control with information and binary feedback for δb = 1, δm = 1,δp = 0 and κI = 0.6 in the upper and δb = 2, δm = 2, δp = 1 and κI = 0.2 in the lower plot. We plotboth the output powers (dotted) and the emerging SIR (solid). Additionally, the target SIR of 10 is givenby a black line. For better comparability we also compute the root-mean-square error of the SIR for 200timesteps (in parenthesis). For high delay we lowered the mobile’s gain in order to get a stable informationfeedback – binary feedback tolerates approximately five times higher gain.

8.6 Conclusion 103
8.6 Conclusion
In this chapter, we used simulations to back up our earlier assessment. In the course of
doing so, we gave some insight into the impact of various parameter changes. Since there
are a lot of variables in the considered system, we mostly changed the parameters one by
one.
We could see that our analysis, which was only done based on a linearization around
the steady state, gives good insight into the system’s behavior. This holds as long as we do
not consider the binary feedback. For the binary feedback, we saw new phenomena emerge
(e.g. the oscillation around a lower target SIR and improved overall stability).
Lastly, we took into account that our analysis was based on the assumption that the
gain matrix is static in the timescale of the control feedback. Some simulations with
randomly changing gain matrices showed that our analysis holds in that framework to a
certain extend.

104 8 Simulations

Chapter 9
Conclusions
During the course of this work, we modeled the uplink power control of the well-established
3G network. Our point of departure was Gunnarsson’s PhD thesis [6].
The model we derived is a MIMO system. However, we exclusively analyzed the homo-
geneous decentralized case where the actual power control loop is identical and decoupled
for every mobile and the only existing coupling is done by the interference between the
mobiles. The first part, the homogeneity assumption, could be generalized since channel
properties, e.g. delays, might very well vary. The second part, coupling only by interference,
is due to the distributed nature of our system and thus valid.
Note that we did focus on the analysis of the linearized system. It is linearized in
two ways: on the one hand, we linearized the interference around the steady state of the
mobile’s output powers at the desired Signal-to-Interference Ratio. On the other hand, we
considered information feedback, i.e. the mobile receives a control signal u ∈ R, while in the
real-world 3G system there is only binary feedback; that means only a decrease/increase bit
is sent. The validity of our first linearization could be seen through simulation, where the
actual interference was calculated. The second assumption proved to be less maintainable.
Therefore, we added a chapter on describing-function analysis. Note, however, that due to
similarities in communication networks the former analysis still has ample applications.
The analysis of the linearized system comprised stability as well as performance analysis.
The former was done with a modified Nyquist criterion. Here, we could split the dynamics
105

106 9 Conclusions
of the control loop from the dynamics of the linearized interference and thus facilitate the
analysis notably. The latter was done by finding bounds on the rate of convergence of
the linearized system. In order to do so, we utilized the results of the Nyquist analysis in
combination with scaling the system.
Issues of the binary feedback were investigated using describing functions. They could
give a good approximation of possible steady-state limit cycles of our system. The weakness
of this approach is that only the first harmonics are captured. For higher-order control
this might not suffice and a more involved approach, e.g. using more than the first Fourier
coefficient, could be needed.
Considerable efforts were made to find means to handle delays in our system. Again, de-
parting from Gunnarsson’s thesis, we investigated Time-Delay Compensation approaches.
While investigating the classical TDC we came up with an extended version. Both com-
pensators were then subject to internal-model-error robustness analysis. It turns out that
there a constraints on the applicability of both TDC:s. Nevertheless, if applicable, a com-
pensation can greatly improve stability to a small cost of performance.

9.1 Contributions 107
9.1 Contributions
While working on this Master’s thesis the following original results were obtained:
• A proof that the eigenvalues of the linearized interference function and the feasibility
matrix are the same.
• An easy-to-use case-specific Nyquist theorem (see Theorem 5) that allows to split
the interference from the lower loop. Note that ideas from [2] where used in its
derivation.
• A high-order time-delay compensator especially for the case that there exist delays
in the base station due to computation or less frequent power-update signaling was
found.
• Specific describing functions methods for the MIMO case could be found, using sim-
ilar separation as in the Nyquist analysis. This was a left-open question in [7].
• Code for the implementation of the discussed contributions was generated in Math-
ematica and a Matlab/Simulink model was build to validate our predictions.
9.2 Possible Extensions
Further work is possible extending this thesis in a number of areas. Most noteworthy are
the following:
• Relaxing the homogeneity assumption in the modeling, i.e. allowing each channel to
behave differently.
• Finding a more general approach to linearizing the interference, e.g. linearize it
around the manifold of feasible steady states.
• Verifying our heuristic observation from Section 8.2.5 or proving it wrong.
• Extending the describing functions method to include more harmonics.

108 9 Conclusions

Bibliography
[1] Ilja N. Bronstein. Taschenbuch der Mathematik. Verlag Harri Deutsch, Frankfurt am
Main, 7th edition, 2008.
[2] J.A. Fax and R.M. Murray. Information flow and cooperative control of vehicle for-
mations. Automatic Control, IEEE Transactions on, 49(9):1465 – 1476, september
2004.
[3] G.J. Foschini and Z. Miljanic. A simple distributed autonomous power control algo-
rithm and its convergence. IEEE Trans. Vehicular Technology, 42(4):641–646, 1993.
[4] F.R. Gantmacher. The Theory of Matrices, volume 2. Chelsea Publishing Company,
New York, N.Y., 1959.
[5] Semjon A. Gerschgorin. Uber die abgrenzung der eigenwerte einer matrix. Izv. Akad.
Nauk. SSSR Ser. Mat, 1:749–754, 1931.
[6] Fredrik Gunnarsson. Power Control in Cellular Radio Systems: Analysis, Design and
Estimation. PhD thesis, Department of Electrical Engineering, Linkopings universitet,
2000.
[7] Fredrik Gunnarsson, Fredrik Gustafsson, and Jonas Blom. Dynamical effects of time
delays and time delay compensation in power controlled cs-cdma. IEEE Journal on
selected Areas in Communications, 19(1):141–151, 2001.
[8] Hassan K. Khalil. Nonlinear Systems. Prentice Hall, Englewood Cliffs, New Jersey,
3rd edition, 2002.
109

110 Bibliography
[9] Benjamin C. Heinrich, Anders Moller, and Ulf T. Jonsson. Local stability of high
order power control in cellular networks, 2011. Submitted to CDC-ECC 11.
[10] Henrik Sjostrom and Mengxi Wu. Optimization of communication networks: Iterative
algorithms. Bachelor thesis, Department of Mathematics, Optimization and Systems
Theory, Royal Institute of Technology, Stockholm, 2010.
[11] Jan M. Maciejowski. Multivariable Feedback Design. Addison-Wesley, Reading, Mas-
sachusetts, 3rd edition, 1998.
[12] Karl J. Astrom and Bjorn Wittenmark. Adaptive Control. Addison-Wesley, Reading,
Massachusetts, 2nd edition, 1995.
[13] Karl J. Astrom and Bjorn Wittenmark. Computer Controlled Systems – Theory and
Design. Prentice-Hall, Englewood Cliffs, New Jersey, 3rd edition, 1997.
[14] Sarah Koskie and Zoran Gajic. Signal-to-interference-based power control for wireless
networks: A survey 1992–2005. Dynamics of Continuous, Discrete and Impulsive
Systems B: Applications and Algorithms, 13(2):187–220, 2006.
[15] Joseph P. LaSalle. The Stability of Dynamical Systems. SIAM, Philadelphia, Penn-
sylvania, 1976.
[16] Harry T. Nyquist. Regeneration theory. Bell System Technical Journal, 11:126–147,
1932.