Embed Size (px)
Citation preview

DeMoN: Depth and Motion Network for Learning Monocular Stereo
Benjamin Ummenhofer*,1 Huizhong Zhou*,1
{ummenhof, zhouh}@cs.uni-freiburg.de
Jonas Uhrig1,2 Nikolaus Mayer1 Eddy Ilg1 Alexey Dosovitskiy1 Thomas Brox1
1University of Freiburg 2Daimler AG R&D
{uhrigj, mayern, ilg, dosovits, brox}@cs.uni-freiburg.de
Abstract
In this paper we formulate structure from motion as a
learning problem. We train a convolutional network end-
to-end to compute depth and camera motion from succes-
sive, unconstrained image pairs. The architecture is com-
posed of multiple stacked encoder-decoder networks, the
core part being an iterative network that is able to improve
its own predictions. The network estimates not only depth
and motion, but additionally surface normals, optical flow
between the images and confidence of the matching. A cru-
cial component of the approach is a training loss based on
spatial relative differences. Compared to traditional two-
frame structure from motion methods, results are more ac-
curate and more robust. In contrast to the popular depth-
from-single-image networks, DeMoN learns the concept of
matching and, thus, better generalizes to structures not seen
during training.
1. Introduction
Structure from motion (SfM) is a long standing task in
computer vision. Most existing systems, which represent
the state of the art, are carefully engineered pipelines con-
sisting of several consecutive processing steps. A funda-
mental building block of these pipelines is the computation
of the structure and motion for two images. Present imple-
mentations of this step have some inherent limitations. For
instance, it is common to start with the estimation of the
camera motion before inferring the structure of the scene by
dense correspondence search. Thus, an incorrect estimate of
the camera motion leads to wrong depth predictions. More-
over, the camera motion is estimated from sparse corre-
spondences computed via keypoint detection and descriptor
matching. This low-level process is prone to outliers and
does not work in non-textured regions. Finally, all exist-
∗Equal contribution
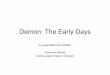
Figure 1. Illustration of DeMoN. The input to the network is two
successive images from a monocular camera. The network esti-
mates the depth in the first image and the camera motion.
ing SfM approaches fail in case of small camera translation.
This is because it is hard to integrate priors that could pro-
vide reasonable solutions in those degenerate cases.
In this paper, we succeed for the first time in training a
convolutional network to jointly estimate the depth and the
camera motion from an unconstrained pair of images. This
approach is very different from the typical SfM pipeline in
that it solves the problems of motion and dense depth esti-
mation jointly. We cannot yet provide a full learning-based
system for large-scale SfM, but the two-frame case is a cru-
cial first step towards this goal. In the longer term, the learn-
ing approach has large potential, since it integrates naturally
all the shape from X approaches: multi-view, silhouettes,
texture, shading, defocus, haze. Moreover, strong priors on
objects and structure can be learned efficiently from data
and regularize the problem in degenerate cases; see Fig. 6
for example. This potential is indicated by our results for
the two-frame scenario, where the learning approach clearly
outperforms traditional methods.
Convolutional networks recently have shown to excel at
depth prediction from a single image [7, 8, 24]. By learning
priors about objects and their shapes these networks reach
remarkably good performance in restricted evaluation sce-
15038

narios such as indoor or driving scenes. However, single-
image methods have more problems generalizing to previ-
ously unseen types of images. This is because they do not
exploit stereopsis. Fig. 9 shows an example, where depth
from a single image fails, because the network did not see
similar structures before. Our network, which learned to ex-
ploit the motion parallax, does not have this restriction and
generalizes well to very new scenarios.
To exploit the motion parallax, the network must put the
two input images in correspondence. We found that a sim-
ple encoder-decoder network fails to make use of stereo:
when trained to compute depth from two images it ends up
using only one of them. Depth from a single image is a
shortcut to satisfy the training objective without putting the
two images into correspondence and deriving camera mo-
tion and depth from these correspondences.
In this paper, we present a way to avoid this shortcut and
elaborate on it to obtain accurate depth maps and camera
motion estimates. The key to the problem is an architecture
that alternates optical flow estimation with the estimation
of camera motion and depth; see Fig. 3. In order to solve
for optical flow, the network must use both images. To this
end, we adapted the FlowNet architecture [5] to our case.
Our network architecture has an iterative part that is com-
parable to a recurrent network, since weights are shared.
Instead of the typical unrolling, which is common practice
when training recurrent networks, we append predictions of
previous training iterations to the current minibatch. This
training technique saves much memory and allows us to in-
clude more iterations for training. Another technical contri-
bution of this paper is a special gradient loss to deal with the
scale ambiguity in structure from motion. The network was
trained on a mixture of real images from a Kinect camera,
including the SUN3D dataset [43], and a variety of rendered
scenes that we created for this work.
2. Related Work
Estimation of depth and motion from pairs of images
goes back to Longuet-Higgins [25]. The underlying 3D ge-
ometry is a consolidated field, which is well covered in text-
books [17, 10]. State-of-the-art systems [14, 42] allow for
reconstructions of large scenes including whole cities. They
consist of a long pipeline of methods, starting with descrip-
tor matching for finding a sparse set of correspondences
between images [26], followed by estimating the essential
matrix to determine the camera motion. Outliers among
the correspondences are typically filtered out via RANSAC
[11]. Although these systems use bundle adjustment [39]
to jointly optimize camera poses and structure of many im-
ages, they depend on the quality of the estimated geometry
between image pairs for initialization. Only after estimation
of the camera motion and a sparse 3D point cloud, dense
depth maps are computed by exploiting the epipolar geom-
etry [4]. LSD-SLAM [9] deviates from this approach by
jointly optimizing semi-dense correspondences and depth
maps. It considers multiple frames from a short temporal
window but does not include bundle adjustment. DTAM
[30] can track camera poses reliably for critical motions by
matching against dense depth maps. However, an external
depth map initialization is required, which in turn relies on
classic structure and motion methods.
Camera motion estimation from dense correspondences
has been proposed by Valgaerts et al. [41]. In this paper,
we deviate completely from these previous approaches by
training a single deep network that includes computation of
dense correspondences, estimation of depth, and the camera
motion between two frames.
Eigen et al. [7] trained a ConvNet to predict depth from
a single image. Depth prediction from a single image is an
inherently ill-posed problem which can only be solved us-
ing priors and semantic understanding of the scene – tasks
ConvNets are known to be very good at. Liu et al. [24]
combined a ConvNet with a superpixel-based conditional
random field, yielding improved results. Our two-frame
network also learns to exploit the same cues and priors as
the single-frame networks, but in addition it makes use of a
pair of images and the motion parallax between those. This
enables generalization to arbitrary new scenes.
ConvNets have been trained to replace the descriptor
matching module in aforementioned SfM systems [6, 44].
The same idea was used by Zbontar and LeCun [45] to es-
timate dense disparity maps between stereo images. Com-
putation of dense correspondences with a ConvNet that is
trained end-to-end on the task, was presented by Dosovit-
skiy et al. [5]. Mayer et al. [28] applied the same concept
to dense disparity estimation in stereo pairs. We, too, make
use of the FlowNet idea [5], but in contrast to [28, 45], the
motion between the two views is not fixed, but must be es-
timated to derive depth estimates. This makes the learning
problem much more difficult.
Flynn et al. [12] implicitly estimated the 3D structure
of a scene from a monocular video using a convolutional
network. They assume known camera poses – a large sim-
plification which allows them to use the plane-sweeping
approach to interpolate between given views of the scene.
Moreover, they never explicitly predict the depth, only RGB
images from intermediate viewpoints.
Agrawal et al. [2] and Jayaraman & Grauman [19] ap-
plied ConvNets to estimating camera motion. The main fo-
cus of these works is not on the camera motion itself, but on
learning a feature representation useful for recognition. The
accuracy of the estimated camera motion is not competitive
with classic methods. Kendall et al. [21] trained a ConvNet
for camera relocalization — predicting the location of the
camera within a known scene from a single image. This is
mainly an instance recognition task and requires retraining
5039

3x
r,t
egomotionimage pairbootstrap net refinement netiterative net
depth
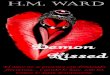
Figure 2. Overview of the architecture. DeMoN takes an image pair as input and predicts the depth map of the first image and the relative
pose of the second camera. The network consists of a chain of encoder-decoder networks that iterate over optical flow, depth, and egomotion
estimation; see Fig. 3 for details. The refinement network increases the resolution of the final depth map.
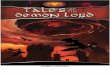
Figure 3. Schematic representation of the encoder-decoder pair used in the bootstrapping and iterative network. Inputs with gray font are
only available for the iterative network. The first encoder-decoder predicts optical flow and its confidence from an image pair and previous
estimates. The second encoder-decoder predicts the depth map and surface normals. A fully connected network appended to the encoder
estimates the camera motion r, t and a depth scale factor s. The scale factor s relates the scale of the depth values to the camera motion.
for each new scene. All these works do not provide depth
estimates.
3. Network Architecture
The overall network architecture is shown in Fig. 2.
DeMoN is a chain of encoder-decoder networks solving dif-
ferent tasks. The architecture consists of three main com-
ponents: the bootstrap net, the iterative net and the refine-
ment net. The first two components are pairs of encoder-
decoder networks, where the first one computes optical flow
while the second one computes depth and camera motion;
see Fig. 3. The iterative net is applied recursively to succes-
sively refine the estimates of the previous iteration. The last
component is a single encoder-decoder network that gener-
ates the final upsampled and refined depth map.
Bootstrap net. The bootstrap component gets the image
pair as input and outputs the initial depth and motion es-
timates. Internally, first an encoder-decoder network com-
putes optical flow and a confidence map for the flow (the
left part of Fig. 3). The encoder consists of pairs of convo-
lutional layers with 1D filters in y and x-direction. Using
pairs of 1D filters as suggested in [37] allows us to use spa-
tially large filter while keeping the number of parameters
and runtime manageable. We gradually reduce the spatial
resolution with a stride of 2 while increasing the number
of channels. The decoder part generates the optical flow
estimate from the encoder’s representation via a series of
up-convolutional layers with stride 2 followed by two con-
volutional layers. It outputs two components of the optical
Method L1-inv sc-inv L1-rel
Single image 0.080 0.159 0.696
Naıve image pair 0.079 0.165 0.722
DeMoN 0.012 0.131 0.097
Table 1. Naıve two-frame depth estimation does not perform bet-
ter than depth from a single image on any of the error measures
(smaller is better). The architecture of DeMoN forces the network
to use both images, yielding a large performance improvement.
flow field and an estimate of their confidence. Details on the
loss and the training procedure are described in Section 5.
The second encoder-decoder, shown in the right part of
Fig. 3, takes as input the optical flow, its confidence, the im-
age pair, and the second image warped with the estimated
flow field. Based on these inputs it estimates depth, sur-
face normals, and camera motion. The architecture is the
same as above, apart from the extra 3 fully connected lay-
ers that compute the camera motion and a scaling factor for
the depth prediction. The latter reflects the inherent con-
nection between depth and motion predictions due to scale
ambiguity; see Section 4.
By feeding optical flow estimate into the second
encoder-decoder we let it make use of motion parallax.
Tab. 1 shows that an encoder-decoder network trained to es-
timate depth and camera motion directly from an image pair
(naıve image pair) fails to make use of stereo cues and per-
forms on par with a single-image network. DeMoN, on the
other hand, performs significantly better.
Iterative net. The iterative net is trained to improve ex-
5040

isting depth, normal, and motion estimates. The architec-
ture of this encoder-decoder pair is identical to the boot-
strap net, but it takes additional inputs. We convert the
depth map and camera motion estimated by the bootstrap
net or a previous iteration of the iterative net into an op-
tical flow field, and feed it into the first encoder-decoder
together with other inputs. Likewise, we convert the optical
flow to a depth map using the previous camera motion pre-
diction and pass it along with the optical flow to the second
encoder-decoder. In both cases the networks are presented
with a prediction proposal generated from the predictions of
the previous encoder-decoder.
Fig. 4 shows how the optical flow and depth improve
with each iteration of the network. The iterations enable
sharp discontinuities, improve the scale of the depth values,
and can even correct wrong estimates of the initial boot-
strapping network. The improvements largely saturate after
3 or 4 iterations. Quantitative analysis is shown in the sup-
plementary material.
During training we simulate 4 iterations by appending
predictions from previous training iterations to the mini-
batch. Unlike unrolling, there is no backpropagation of the
gradient through iterations. Instead, the gradient of each
iteration is described by the losses on the well defined net-
work outputs: optical flow, depth, normals, and camera mo-
tion. Compared to backpropagation through time this saves
a lot of memory and allows us to have a larger network
and more iterations. A similar approach was taken by Li et
al. [23], who train each iteration in a separate step and there-
fore need to store predictions as input for the next stage. We
also train the first iteration on its own, but then train all iter-
ations jointly which avoids intermediate storage.
Refinement net. While the previous network compo-
nents operate at a reduced resolution of 64 × 48 to save
parameters and to reduce training and test time, the final re-
finement net upscales the predictions to the full input image
resolution (256 × 192). It gets as input the full resolution
first image and the nearest-neighbor-upsampled depth and
normal field. Fig. 5 shows the low-resolution input and the
refined high-resolution output.
A forward pass through the network with 3 iterations
takes 110ms on an Nvidia GTX Titan X. Implementation
details and exact network definitions of all network compo-
nents are provided in the supplementary material.
4. Depth and Motion Parameterization
The network computes the depth map in the first view
and the camera motion to the second view. We represent
the relative pose of the second camera with r, t ∈ R3. The
rotation r = θv is an angle axis representation with angle θand axis v. The translation t is given in Cartesian coordi-
nates.
It is well-known that the reconstruction of a scene from
Bootstrap Iterative 1 2 3 GT
Dep
thF
low
Figure 4. Top: Iterative depth refinement. The bootstrap net fails
to accurately estimate the scale of the depth. The iterations refine
the depth prediction and strongly improve the scale of the depth
values. The L1-inverse error drops from 0.0137 to 0.0072 after
the first iteration. Bottom: Iterative refinement of optical flow.
Images show the x component of the optical flow for better visi-
bility. The flow prediction of the bootstrap net misses the object
completely. Motion edges are retrieved already in the first iteration
and the endpoint error is reduced from 0.0176 to 0.0120.
Prediction Refined prediction Ground Truth
Figure 5. The refinement net generates a high-resolution depth
map (256 × 192) from the low-resolution estimate (64 × 48) and
the input image. The depth sampling preserves depth edges and
can even repair wrong depth measurements.
images with unknown camera motion can be determined
only up to scale. We resolve the scale ambiguity by nor-
malizing translations and depth values such that ‖t‖ = 1.
This way the network learns to predict a unit norm transla-
tion vector.
Rather than the depth z, the network estimates the in-
verse depth ξ = 1/z. The inverse depth allows represen-
tation of points at infinity and accounts for the growing lo-
calization uncertainty of points with increasing distance.To
match the unit translation, our network predicts a scalar
scaling factor s, which we use to obtain the final depth val-
ues sξ.
5. Training Procedure
5.1. Loss functions
The network estimates outputs of very different na-
ture: high-dimensional (per-pixel) depth maps and low-
dimensional camera motion vectors. The loss has to bal-
ance both of these objectives, and stimulate synergy of the
two tasks without over-fitting to a specific scenario.
Point-wise losses. We apply point-wise losses to our
outputs: inverse depth ξ, surface normals n, optical flow
w, and optical flow confidence c. For depth we use an L1
loss directly on the inverse depth values:
Ldepth =∑
i,j |sξ(i, j)− ξ(i, j)|, (1)
5041

with ground truth ξ. Note that we apply the predicted scale
s to the predicted values ξ.
For the loss function of the normals and the optical flow
we use the (non-squared) L2 norm to penalize deviations
from the respective ground truths n and w
Lnormal =∑
i,j ‖n(i, j)− n(i, j)‖2
Lflow =∑
i,j ‖w(i, j)− w(i, j)‖2 .(2)
For optical flow this amounts to the usual endpoint error.
We train the network to assess the quality of its own flow
prediction by predicting a confidence map for each optical
flow component. The ground truth of the confidence for the
x component is
cx(i, j) = e−|wx(i,j)−wx(i,j)|, (3)
and the corresponding loss function reads as
Lflow confidence =∑
i,j |cx(i, j)− cx(i, j)| . (4)
Motion losses. We use a minimal parameterization of
the camera motion with 3 parameters for rotation r and
translation t each. The losses for the motion vectors are
Lrotation = ‖r− r‖2
Ltranslation = ‖t− t‖2.(5)
The translation ground truth is always normalized such that
‖t‖2 = 1, while the magnitude of r encodes the angle of
the rotation.
Scale invariant gradient loss. We define a discrete scale
invariant gradient g as
gh[f ](i, j) =(
f(i+h,j)−f(i,j)|f(i+h,j)|+|f(i,j)| ,
f(i,j+h)−f(i,j)|f(i,j+h)|+|f(i,j)|
)⊤
.
(6)
Based on this gradient we define a scale invariant loss that
penalizes relative depth errors between neighbouring pixels:
Lgrad ξ =∑
h∈{1,2,4,8,16}
∑
i,j
∥
∥
∥gh[ξ](i, j)− gh[ξ](i, j)
∥
∥
∥
2.
(7)
To cover gradients at different scales we use 5 different
spacings h. This loss stimulates the network to compare
depth values within a local neighbourhood for each pixel.
It emphasizes depth discontinuities, stimulates sharp edges
in the depth map and increases smoothness within homo-
geneous regions as seen in Fig. 10. Note that due to the
relation gh[ξ](i, j) = −gh[z](i, j) for ξ, z > 0, the loss is
the same for the actual non-inverse depth values z.
We apply the same scale invariant gradient loss to each
component of the optical flow. This enhances the smooth-
ness of estimated flow fields and the sharpness of motion
discontinuities.
Weighting. We individually weigh the losses to balance
their importance. The weight factors were determined em-
pirically and are listed in the supplementary material.
5.2. Training Schedule
The network training is based on the Caffe frame-
work [20]. We train our model from scratch with Adam [22]
using a momentum of 0.9 and a weight decay of 0.0004.
The whole training procedure consists of three phases.
First, we sequentially train the four encoder-decoder
components in both bootstrap and iterative nets for 250k
iterations each with a batch size of 32. While training an
encoder-decoder we keep the weights for all previous com-
ponents fixed. For encoder-decoders predicting optical flow,
the scale invariant loss is applied after 10k iterations.
Second, we train only the encoder-decoder pair of the it-
erative net. In this phase we append outputs from previous
three training iterations to the minibatch. In this phase the
bootstrap net uses batches of size 8. The outputs of the pre-
vious three network iterations are added to the batch, which
yields a total batch size of 32 for the iterative network. We
run 1.6 million training iterations.
Finally, the refinement net is trained for 600k iterations
with all other weights fixed. The details of the training pro-
cess, including the learning rate schedules, are provided in
the supplementary material.
6. Experiments
6.1. Datasets
SUN3D [43] provides a diverse set of indoor images to-
gether with depth and camera pose. The depth and camera
pose on this dataset are not perfect. Thus, we sampled im-
age pairs from the dataset and automatically discarded pairs
with a high photoconsistency error. We split the dataset so
that the same scenes do not appear in both the training and
the test set.
RGB-D SLAM [36] provides high quality camera poses
obtained with an external motion tracking system. Depth
maps are disturbed by measurement noise, and we use the
same preprocessing as for SUN3D. We created a training
and a test set.
MVS includes several outdoor datasets. We used the
Citywall and Achteckturm datasets from [15] and the
Breisach dataset [40] for training and the datasets provided
with COLMAP [33, 34] for testing. The depth maps of the
reconstructed scenes are often sparse and can comprise re-
construction errors.
Scenes11 is a synthetic dataset with generated images of
virtual scenes with random geometry, which provide perfect
depth and motion ground truth, but lack realism.
Thus, we introduce the Blendswap dataset which is
based on 150 scenes from blendswap.com. The dataset
provides a large variety of scenes, ranging from cartoon-like
to photorealistic scenes. The dataset contains mainly indoor
scenes. We used this dataset only for training.
5042

NYUv2 [29] provides depth maps for diverse indoor
scenes but lacks camera pose information. We did not train
on NYU and used the same test split as in Eigen et al. [7]. In
contrast to Eigen et al., we also require a second input im-
age that should not be identical to the previous one. Thus,
we automatically chose the next image that is sufficiently
different from the first image according to a threshold on
the difference image.
In all cases where the surface normals are not available,
we generated them from the depth maps. We trained De-
MoN specifically for the camera intrinsics used in SUN3D
and adapted all other datasets by cropping and scaling to
match these parameters.
6.2. Error metrics
While single-image methods aim to predict depth at the
actual physical scale, two-image methods typically yield the
scale relative to the norm of the camera translation vector.
Comparing the results of these two families of methods re-
quires a scale-invariant error metric. We adopt the scale-
invariant error of [8], which is defined as
sc-inv(z, z) =√
1n
∑
i d2i −
1n2 (
∑
i di)2, (8)
with di = log zi−log zi. For comparison with classic struc-
ture from motion methods we use the following measures:
L1-rel(z, z) = 1n
∑
i|zi−zi|
zi(9)
L1-inv(z, z) = 1n
∑
i|ξi − ξi| =1n
∑
i
∣
∣
∣
1zi
− 1zi
∣
∣
∣(10)
L1-rel computes the depth error relative to the ground truth
depth and therefore reduces errors where the ground truth
depth is large and increases the importance of close objects
in the ground truth. L1-inv behaves similarly and resembles
our loss function for predicted inverse depth values (1).
For evaluating the camera motion estimation, we report
the angle (in degrees) between the prediction and the ground
truth for both the translation and the rotation. The length of
the translation vector is 1 by definition.
The accuracy of optical flow is measured by the aver-
age endpoint error (EPE), that is, the Euclidean norm of the
difference between the predicted and the true flow vector,
averaged over all image pixels. The flow is scaled such that
the displacement by the image size corresponds to 1.
6.3. Comparison to classic structure from motion
We compare to several strong baselines implemented by
us from state-of-the-art components (“Base-*”). For these
baselines, we estimated correspondences between images,
either by matching SIFT keypoints (“Base-SIFT”) or with
the FlowFields optical flow method from Bailer et al. [3]
(“Base-FF”). Next, we computed the essential matrix with
the normalized 8-point algorithm [16] and RANSAC. To
Depth Motion
Method L1-inv sc-inv L1-rel rot trans
MV
S
Base-Oracle 0.019 0.197 0.105 0 0
Base-SIFT 0.056 0.309 0.361 21.180 60.516
Base-FF 0.055 0.308 0.322 4.834 17.252
Base-Matlab - - - 10.843 32.736
Base-Mat-F - - - 5.442 18.549
DeMoN 0.047 0.202 0.305 5.156 14.447
Sce
nes
11
Base-Oracle 0.023 0.618 0.349 0 0
Base-SIFT 0.051 0.900 1.027 6.179 56.650
Base-FF 0.038 0.793 0.776 1.309 19.425
Base-Matlab - - - 0.917 14.639
Base-Mat-F - - - 2.324 39.055
DeMoN 0.019 0.315 0.248 0.809 8.918
RG
B-D
Base-Oracle 0.026 0.398 0.336 0 0
Base-SIFT 0.050 0.577 0.703 12.010 56.021
Base-FF 0.045 0.548 0.613 4.709 46.058
Base-Matlab - - - 12.831 49.612
Base-Mat-F - - - 2.917 22.523
DeMoN 0.028 0.130 0.212 2.641 20.585
Sun3D
Base-oracle 0.020 0.241 0.220 0 0
Base-SIFT 0.029 0.290 0.286 7.702 41.825
Base-FF 0.029 0.284 0.297 3.681 33.301
Base-Matlab - - - 5.920 32.298
Base-Mat-F - - - 2.230 26.338
DeMoN 0.019 0.114 0.172 1.801 18.811
NY
Uv2
Base-oracle - - - - -
Base-SIFT - - - - -
Base-FF - - - - -
Base-Matlab - - - - -
Base-Mat-F - - - - -
DeMoN - - - - -
Depth
Method sc-inv
Liu indoor 0.260
Liu outdoor 0.341
Eigen VGG 0.225
DeMoN 0.203
Liu indoor 0.816
Liu outdoor 0.814
Eigen VGG 0.763
DeMoN 0.303
Liu indoor 0.338
Liu outdoor 0.428
Eigen VGG 0.272
DeMoN 0.134
Liu indoor 0.214
Liu outdoor 0.401
Eigen VGG 0.175
DeMoN 0.126
Liu indoor 0.210
Liu outdoor 0.421
Eigen VGG 0.148
DeMoN 0.180
Table 2. Left: Comparison of two-frame depth and motion es-
timation methods. Lower is better for all measures. For a fair
comparison with the baseline methods, we evaluate depth only at
pixels visible in both images. For Base-Matlab depth is only avail-
able as a sparse point cloud and is therefore not compared to here.
We do not report the errors on NYUv2 since motion ground truth
(and therefore depth scale) is not available. Right: Comparison
to single-frame depth estimation. Since the scale estimates are not
comparable, we report only the scale invariant error metric.
further improve accuracy we minimized the reprojection er-
ror using the ceres library [1]. Finally, we generated the
depth maps by plane sweep stereo and used the approach
of Hirschmueller et al. [18] for optimization. We also re-
port the accuracy of the depth estimate when providing
the ground truth camera motion (“Base-Oracle”). (“Base-
Matlab”) and (“Base-Mat-F”) are implemented in Matlab.
(“Base-Matlab”) uses Matlab implementations of the KLT
algorithm [38, 27, 35] for correspondence search while
(“Base-Mat-F”) uses the predicted flow from DeMoN. The
essential matrix is computed with RANSAC and the 5-point
algorithm [31] for both.
Tab. 2 shows that DeMoN outperforms all baseline
methods both on motion and depth accuracy by a factor of
1.5 to 2 on most datasets. The only exception is the MVS
dataset where the motion accuracy of DeMoN is on par with
the strong baseline based on FlowFields optical flow. This
demonstrates that traditional methods work well on the tex-
ture rich scenes present in MVS, but do not perform well for
example on indoor scenes, with large homogeneous regions
or small baselines where priors may be very useful. Besides
5043

Reference
Sec
on
d
Figure 6. Qualitative performance gain by increasing the baseline
between the two input images for DeMoN. The depth map is pro-
duced with the top left reference image and the second image be-
low. The first output is obtained with two identical images as input,
which is a degenerate case for traditional structure from motion.
First frame Frontal view Top view
Figure 7. Result on a sequence of the RGB-D SLAM dataset [36].
The accumulated pairwise pose estimates by our network (red) are
locally consistent with the ground truth trajectory (black). The
depth prediction of the first frame is shown. The network also
separates foreground and background in its depth output.
that, all Base-* methods use images at the full resolution of
640 × 480, while our method uses downsampled images
of 256 × 192 as input. Higher resolution gives the Base-*
methods an advantage in depth accuracy, but on the other
hand these methods are more prone to outliers. For detailed
error distributions see the supplemental material. Remark-
ably, on all datasets except for MVS the depth estimates of
DeMoN are better than the ones a traditional approach can
produce given the ground truth motion. This is supported
by qualitative results in Fig. 8. We also note that DeMoN
has smaller motion errors than (“Base-Mat-F”), showing its
advantage over classical methods in motion estimation.
In contrast to classical approaches, we can also han-
dle cases without and with very little camera motion, see
Fig. 6. We used our network to compute camera trajecto-
ries by simple concatenation of the motion of consecutive
frames, as shown in Fig. 7. The trajectory shows mainly
translational drift. We also did not apply any drift correc-
tion which is a crucial component in SLAM systems, but
results convince us that DeMoN can be integrated into such
systems.
6.4. Comparison to depth from single image
To demonstrate the value of the motion parallax, we
additionally compare to the single-image depth estimation
methods by Eigen & Fergus [7] and Liu et al. [24]. We com-
pare to the improved version of the Eigen & Fergus method,
which is based on the VGG network architecture, and to two
Image GT Base-O Eigen DeMoN
Su
n3
DR
GB
DM
VS
Sce
nes
11
NY
Uv
2
Figure 8. Top: Qualitative depth prediction comparison on var-
ious datasets. The predictions of DeMoN are very sharp and de-
tailed. The Base-Oracle prediction on NYUv2 is missing because
the motion ground truth is not available. Results on more methods
and examples are shown in the supplementary material.
models by Liu et al.: one trained on indoor scenes from the
NYUv2 dataset (“indoor”) and another, trained on outdoor
images from the Make3D dataset [32] (“outdoor”).
The comparison in Fig. 8 shows that the depth maps pro-
duced by DeMoN are more detailed and more regular than
the ones produced by other methods. This becomes even
more obvious when the results are visualized as a point
cloud; see the videos in the supplemental material.
On all but one dataset, DeMoN outperforms the single-
frame methods also by numbers, typically by a large mar-
gin. Notably, a large improvement can be observed even on
the indoor datasets, Sun3D and RGB-D, showing that the
additional stereopsis complements the other cues that can
be learned from the large amounts of training data avail-
able for this scenario. Only on the NYUv2 dataset, DeMoN
is slightly behind the method of Eigen & Fergus. This is
because the comparison is not totally fair: the network of
Eigen & Fergus as well as Liu indoor was trained on the
training set of NYUv2, whereas the other networks have
not seen this kind of data before.
6.4.1 Generalization to new data
Scene-specific priors learned during training may be use-
less or even harmful when being confronted with a scene
that is very different from the training data. In contrast, the
geometric relations between a pair of images are indepen-
dent of the content of the scene and should generalize to
unknown scenes. To analyze the generalization properties
of DeMoN, we compiled a small dataset of images show-
ing uncommon or complicated scenes, for example abstract
sculptures, close-ups of people and objects, images rotated
by 90 degrees.
5044

Image GT Eigen Liu DeMoN
Eigen Liu DeMoN
Figure 9. Visualization of DeMoN’s generalization capabilities to
previously unseen configurations. Single-frame methods have se-
vere problems in such cases, as most clearly visible in the point
cloud visualization of the depth estimate for the last example.
Method L1-inv sc-inv L1-rel
Liu [24] 0.055 0.247 0.194
Eigen [7] 0.062 0.238 0.185
DeMoN 0.041 0.183 0.130
Table 3. Quantitative generalization performance on previously
unseen scenes, objects, and camera rotations, using a self-recorded
and reconstructed dataset. Errors after optimal log-scaling. The
best model of Eigen et al. [7] for this task is based on VGG, for
Liu et al. [24], the model trained on Make3D [13] performed best.
DeMoN achieved best performance after two iterations.
Fig. 9 and Tab. 3 show that DeMoN, as to be expected,
generalizes better to these unexpected scenes than single-
image methods. It shows that the network has learned to
make use of the motion parallax.
6.5. Ablation studies
Our architecture contains some design decisions that we
justify by the following ablation studies. All results have
been obtained on the Sun3D dataset with the bootstrap net.
Choice of the loss function. Tab. 4 shows the influence
of the loss function on the accuracy of the estimated depth
and motion. Interestingly, while the scale invariant loss
greatly improves the prediction qualitatively (see Fig. 10),
it has negative effects on depth scale estimation. This leads
to weak performance on non-scale-invariant metrics and the
motion accuracy. Estimation of the surface normals slightly
improves all results. Finally, the full architecture with the
scale invariant loss, normal estimation, and a loss on the
flow, leads to the best results.
a b c d
Figure 10. Depth prediction comparison with different outputs and
losses. (a) Just L1 loss on the absolute depth values. (b) Addi-
tional output of normals and L1 loss on the normals. (c) Like (b)
but with the proposed gradient loss. (d) Ground truth.
Depth Motion
grad norm flow L1-inv sc-inv L1-rel rot tran
no no no 0.040 0.211 0.354 3.127 30.861
yes no no 0.057 0.159 0.437 4.585 39.819
no yes no 0.037 0.190 0.336 2.570 29.607
no yes yes 0.029 0.184 0.266 2.359 23.578
yes yes yes 0.032 0.150 0.276 2.479 24.372
Table 4. The influence of the loss function on the performance.
The gradient loss improves the scale invariant error, but degrades
the scale-sensitive measures. Surface normal prediction improves
the depth accuracy. A combination of all components leads to the
best tradeoff.
Depth Motion Flow
Confidence L1-inv sc-inv L1-rel rot tran EPE
no 0.030 0.028 0.26 2.830 25.262 0.027
yes 0.032 0.027 0.28 2.479 24.372 0.027
Table 5. The influence of confidence prediction on the overall per-
formance of the different outputs.
Flow confidence. Egomotion estimation only requires
sparse but high-quality correspondences. Tab. 5 shows that
given the same flow, egomotion estimation improves when
given the flow confidence as an extra input. Our interpreta-
tion is that the flow confidence helps finding most accurate
correspondences.
7. Conclusions and Future Work
DeMoN is the first deep network that has learned to es-
timate depth and camera motion from two unconstrained
images. Unlike networks that estimate depth from a single
image, DeMoN can exploit the motion parallax, which is a
powerful cue that generalizes to new types of scenes, and al-
lows to estimate the egomotion. This network outperforms
traditional structure from motion techniques on two frames,
since in contrast to those, it is trained end-to-end and learns
to integrate other shape from X cues. When it comes to han-
dling cameras with different intrinsic parameters it has not
yet reached the flexibility of classic approaches. The next
challenge is to lift this restriction and extend this work to
more than two images. As in classical techniques, this is
expected to significantly improve the robustness and accu-
racy.
Acknowledgements We acknowledge funding by the
ERC Starting Grant VideoLearn, the DFG grant BR-
3815/5-1, and the EU project Trimbot2020.
5045

References
[1] S. Agarwal, K. Mierle, and Others. Ceres Solver. 6
[2] P. Agrawal, J. Carreira, and J. Malik. Learning to see by
moving. In IEEE International Conference on Computer Vi-
sion (ICCV), Dec. 2015. 2
[3] C. Bailer, B. Taetz, and D. Stricker. Flow Fields: Dense Cor-
respondence Fields for Highly Accurate Large Displacement
Optical Flow Estimation. In IEEE International Conference
on Computer Vision (ICCV), Dec. 2015. 6
[4] R. T. Collins. A space-sweep approach to true multi-image
matching. In Proceedings CVPR ’96, 1996 IEEE Computer
Society Conference on Computer Vision and Pattern Recog-
nition, 1996, pages 358–363, June 1996. 2
[5] A. Dosovitskiy, P. Fischer, E. Ilg, P. Hausser, C. Hazırbas,
V. Golkov, P. v.d. Smagt, D. Cremers, and T. Brox. Flownet:
Learning optical flow with convolutional networks. In IEEE
International Conference on Computer Vision (ICCV), Dec.
2015. 2
[6] A. Dosovitskiy, P. Fischer, J. T. Springenberg, M. Ried-
miller, and T. Brox. Discriminative unsupervised feature
learning with exemplar convolutional neural networks. IEEE
Transactions on Pattern Analysis and Machine Intelligence,
38(9):1734–1747, Oct 2016. TPAMI-2015-05-0348.R1. 2
[7] D. Eigen and R. Fergus. Predicting Depth, Surface Normals
and Semantic Labels With a Common Multi-Scale Convo-
lutional Architecture. In IEEE International Conference on
Computer Vision (ICCV), Dec. 2015. 1, 2, 6, 7, 8
[8] D. Eigen, C. Puhrsch, and R. Fergus. Depth Map Predic-
tion from a Single Image using a Multi-Scale Deep Network.
In Z. Ghahramani, M. Welling, C. Cortes, N. D. Lawrence,
and K. Q. Weinberger, editors, Advances in Neural Informa-
tion Processing Systems 27, pages 2366–2374. Curran Asso-
ciates, Inc., 2014. 1, 6
[9] J. Engel, T. Schops, and D. Cremers. LSD-SLAM: Large-
scale direct monocular SLAM. In European Conference on
Computer Vision (ECCV), September 2014. 2
[10] O. Faugeras. Three-dimensional Computer Vision: A Geo-
metric Viewpoint. MIT Press, Cambridge, MA, USA, 1993.
2
[11] M. A. Fischler and R. C. Bolles. Random Sample Consen-
sus: A Paradigm for Model Fitting with Applications to Im-
age Analysis and Automated Cartography. Commun. ACM,
24(6):381–395, June 1981. 2
[12] J. Flynn, I. Neulander, J. Philbin, and N. Snavely. Deep-
stereo: Learning to predict new views from the world’s im-
agery. In Conference on Computer Vision and Pattern Recog-
nition (CVPR), 2016. 2
[13] D. A. Forsyth. Make3d: Learning 3d scene structure from
a single still image. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 31(5):824–840, May 2009. 8
[14] J.-M. Frahm, P. Fite-Georgel, D. Gallup, T. Johnson,
R. Raguram, C. Wu, Y.-H. Jen, E. Dunn, B. Clipp, S. Lazeb-
nik, and M. Pollefeys. Building Rome on a Cloudless Day.
In K. Daniilidis, P. Maragos, and N. Paragios, editors, Eu-
ropean Conference on Computer Vision (ECCV), number
6314 in Lecture Notes in Computer Science, pages 368–381.
Springer Berlin Heidelberg, 2010. 2
[15] S. Fuhrmann, F. Langguth, and M. Goesele. Mve-a mul-
tiview reconstruction environment. In Proceedings of the
Eurographics Workshop on Graphics and Cultural Heritage
(GCH), volume 6, page 8, 2014. 5
[16] R. I. Hartley. In defense of the eight-point algorithm. IEEE
Transactions on Pattern Analysis and Machine Intelligence,
19(6):580–593, June 1997. 6
[17] R. I. Hartley and A. Zisserman. Multiple View Geometry
in Computer Vision. Cambridge University Press, ISBN:
0521540518, second edition, 2004. 2
[18] H. Hirschmuller. Accurate and efficient stereo processing
by semi-global matching and mutual information. In IEEE
International Conference on Computer Vision and Pattern
Recognition (CVPR), volume 2, pages 807–814, June 2005.
6
[19] D. Jayaraman and K. Grauman. Learning image representa-
tions tied to egomotion. In ICCV, 2015. 2
[20] Y. Jia, E. Shelhamer, J. Donahue, S. Karayev, J. Long, R. Gir-
shick, S. Guadarrama, and T. Darrell. Caffe: Convolutional
Architecture for Fast Feature Embedding. arXiv preprint
arXiv:1408.5093, 2014. 5
[21] A. Kendall and R. Cipolla. Modelling Uncertainty in Deep
Learning for Camera Relocalization. In International Conv-
erence on Robotics and Automation (ICRA), 2016. 2
[22] D. Kingma and J. Ba. Adam: A Method for Stochastic
Optimization. arXiv:1412.6980 [cs], Dec. 2014. arXiv:
1412.6980. 5
[23] K. Li, B. Hariharan, and J. Malik. Iterative Instance Segmen-
tation. In 2016 IEEE Conference on Computer Vision and
Pattern Recognition (CVPR), pages 3659–3667, June 2016.
4
[24] F. Liu, C. Shen, G. Lin, and I. Reid. Learning Depth from
Single Monocular Images Using Deep Convolutional Neural
Fields. In IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence, 2015. 1, 2, 7, 8
[25] H. C. Longuet-Higgins. A computer algorithm for re-
constructing a scene from two projections. Nature,
293(5828):133–135, Sept. 1981. 2
[26] D. G. Lowe. Distinctive Image Features from Scale-
Invariant Keypoints. International Journal of Computer Vi-
sion, 60(2):91–110, Nov. 2004. 2
[27] B. D. Lucas and T. Kanade. An Iterative Image Registration
Technique with an Application to Stereo Vision. In Proceed-
ings of the 7th International Joint Conference on Artificial
Intelligence - Volume 2, IJCAI’81, pages 674–679, San Fran-
cisco, CA, USA, 1981. Morgan Kaufmann Publishers Inc. 6
[28] N. Mayer, E. Ilg, P. Hausser, P. Fischer, D. Cremers,
A. Dosovitskiy, and T. Brox. A large dataset to train convo-
lutional networks for disparity, optical flow, and scene flow
estimation. In IEEE International Conference on Computer
Vision and Pattern Recognition (CVPR), 2016. 2
[29] P. K. Nathan Silberman, Derek Hoiem and R. Fergus. Indoor
Segmentation and Support Inference from RGBD Images. In
European Conference on Computer Vision (ECCV), 2012. 6
[30] R. A. Newcombe, S. Lovegrove, and A. Davison. DTAM:
Dense tracking and mapping in real-time. In 2011 IEEE In-
ternational Conference on Computer Vision (ICCV), pages
2320–2327, 2011. 2
5046

[31] D. Nister. An efficient solution to the five-point relative pose
problem. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence, 26(6):756–770, June 2004. 6
[32] A. Saxena, S. H. Chung, and A. Y. Ng. Learning depth from
single monocular images. In In NIPS 18. MIT Press, 2005.
7
[33] J. L. Schonberger and J.-M. Frahm. Structure-from-motion
revisited. In IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR), 2016. 5
[34] J. L. Schonberger, E. Zheng, M. Pollefeys, and J.-M. Frahm.
Pixelwise view selection for unstructured multi-view stereo.
In European Conference on Computer Vision (ECCV), 2016.
5
[35] J. Shi and C. Tomasi. Good features to track. In 1994
IEEE Conference on Computer Vision and Pattern Recog-
nition (CVPR’94), pages 593 – 600, 1994. 6
[36] J. Sturm, N. Engelhard, F. Endres, W. Burgard, and D. Cre-
mers. A benchmark for the evaluation of rgb-d slam systems.
In Proc. of the International Conference on Intelligent Robot
Systems (IROS), Oct. 2012. 5, 7
[37] C. Szegedy, V. Vanhoucke, S. Ioffe, J. Shlens, and Z. Wojna.
Rethinking the Inception Architecture for Computer Vision.
arXiv:1512.00567 [cs], Dec. 2015. 3
[38] C. Tomasi and T. Kanade. Detection and tracking of point
features. Technical report, International Journal of Computer
Vision, 1991. 6
[39] B. Triggs, P. McLauchlan, R. Hartley, and A. Fitzgibbon.
Bundle Adjustment A Modern Synthesis Vision Algorithms:
Theory and Practice. In B. Triggs, A. Zisserman, and
R. Szeliski, editors, Vision Algorithms: Theory and Practice,
volume 1883, pages 153–177. Springer Berlin / Heidelberg,
Apr. 2000. 2
[40] B. Ummenhofer and T. Brox. Global, dense multiscale re-
construction for a billion points. In IEEE International Con-
ference on Computer Vision (ICCV), Dec 2015. 5
[41] L. Valgaerts, A. Bruhn, M. Mainberger, and J. Weickert.
Dense versus Sparse Approaches for Estimating the Funda-
mental Matrix. International Journal of Computer Vision,
96(2):212–234, Jan. 2012. 2
[42] C. Wu. Towards Linear-Time Incremental Structure from
Motion. In International Conference on 3D Vision (3DV),
pages 127–134, June 2013. 2
[43] J. Xiao, A. Owens, and A. Torralba. SUN3D: A Database of
Big Spaces Reconstructed Using SfM and Object Labels. In
IEEE International Conference on Computer Vision (ICCV),
pages 1625–1632, Dec. 2013. 2, 5
[44] S. Zagoruyko and N. Komodakis. Learning to compare im-
age patches via convolutional neural networks. In Confer-
ence on Computer Vision and Pattern Recognition (CVPR),
2015. 2
[45] J. Zbontar and Y. LeCun. Computing the Stereo Matching
Cost With a Convolutional Neural Network. In IEEE Confer-
ence on Computer Vision and Pattern Recognition (CVPR),
June 2015. 2
5047