Embed Size (px)
Citation preview

Density Estimation Using the Trapping Web Design: A Geometric AnalysisAuthor(s): William A. Link and Richard J. BarkerSource: Biometrics, Vol. 50, No. 3 (Sep., 1994), pp. 733-745Published by: International Biometric SocietyStable URL: http://www.jstor.org/stable/2532787 .
Accessed: 28/06/2014 12:51
Your use of the JSTOR archive indicates your acceptance of the Terms & Conditions of Use, available at .http://www.jstor.org/page/info/about/policies/terms.jsp
.JSTOR is a not-for-profit service that helps scholars, researchers, and students discover, use, and build upon a wide range ofcontent in a trusted digital archive. We use information technology and tools to increase productivity and facilitate new formsof scholarship. For more information about JSTOR, please contact [email protected].
.
International Biometric Society is collaborating with JSTOR to digitize, preserve and extend access toBiometrics.
http://www.jstor.org
This content downloaded from 141.101.201.171 on Sat, 28 Jun 2014 12:51:20 PMAll use subject to JSTOR Terms and Conditions

BIOMETRICS 50, 733-745 September 1994
Density Estimation Using the Trapping Web Design: A Geometric Analysis
William A. Link
USFWS, Patuxent Wildlife Research Center, Laurel, Maryland 20708, U.S.A.
and
Richard J. Barker*
Fish and Wildlife Cooperative Research Unit, Department of Wildlife and Range Sciences,
University of Florida, Gainesville, Florida 32611, U.S.A.
SUMMARY
Population densities for small mammal and arthropod populations can be estimated using capture frequencies for a web of traps. Anderson et al. (1983, Ecology 64, 674-680) adapted the point transect methodology to the analysis of such data. This paper proposes a conceptually simple geometric analysis that avoids the need to estimate a point on a density function. The new analysis has the advantage of incorporating data from the outermost rings of traps, explaining large capture frequencies in these rings rather than truncating them from the analysis.
1. Introduction The trapping web design is used as a technique for obtaining density estimates for small mammal and arthropod populations. The design was first proposed by Anderson et al. (1983), as an alternative to estimation of population size N, when the geographic area A associated with N is poorly defined, or unknown. Anderson et al. (1983) adapted the point transect methodology (Burnham, Anderson, and Laake, 1980) to the analysis of trapping web data. Their procedure, which we shall refer to as the Fourier analysis, has been widely accepted, in part due to the perception that it "has the advantage of requiring few assumptions" (Parmenter, MacMahon, and Anderson, 1989).
The trapping web consists of S lines of traps emanating at equal angular increments from a center point, like the spokes of a wheel. On each line, R traps are placed at equal distances d. Each collection of S traps equidistant from the center is referred to as a ring.
We propose an alternative analysis of trapping web data that we believe has several advantages over that of Anderson et al. (1983). Our analysis is in the spirit of that proposed by Schroder (1981, p. 568), who recognized that the relative success rates of a collection of traps are influenced in part by the trap distribution, noting that traps "on the margin of the grid ... have fewer neighboring traps with which to compete for available animals."
In Sections 2 and 3 we discuss assumptions relevant to density estimation, establish notation, and review the model proposed by Anderson et al. (1983). In Section 4, we discuss a shortcoming of the Fourier analysis and of many similar parametric models-namely, their inability to account for edge effects. Sections 5 and 6 describe a new procedure for analyzing trapping web data that accounts for edge effects, and in Section 7 the method is applied to the data analyzed by Anderson et al.
2. The Homogeneity Assumption In describing the models for analyzing trapping web data, it is necessary to refer to an animal's location. This is not to infer that the animals are immotile. We shall, nevertheless, leave the
* Current address: Department of Statistics; Massey University; Palmerston North, New Zealand.
Key words: Capture-recapture; Fourier series model; Population density estimation; Small mam- mals; Trapping web design.
733
This content downloaded from 141.101.201.171 on Sat, 28 Jun 2014 12:51:20 PMAll use subject to JSTOR Terms and Conditions

734 Biometrics, September 1994
definition of location vague, considering it only to be some single point that can be used to characterize the locus of the animal's activity during the trapping period. The important thing is that the notion of location, stated or unstated, affects the interpretation of the term density, and affects the implications of the assumptions used in the analysis. That this is the case will be demonstrated in this section and the following section.
Suppose that the population under consideration consists of N animals. Assuming that captures are independent events, the total number of animals captured, n, is a binomial random variable with success rate Pc. Thus
E(n) = NPc.
The capture probability Pc is related to the density as follows: Let X denote the distance from a randomly selected animal to the center of the web, and let IC be an indicator of the event that the animal is captured. The area of the circle of radius X is Y = nrX2. Let B(y) = Pr(Y S y) and g(y) = Pr(C = lIY = y). Then
Pc- Pr(' = 1) = f g(y) b(y) dy,
where b(y) = dB(y)/dy. Letting F(y) = Pr(Y < ylj = 1) and f(y) = dF(y)/dy, it follows from Bayes' theorem that f(y) =
g(y)b(y)/Pc. If it is assumed that all animals at the center of the web are captured, then g(O) = 1, so f(O) = b(O)/Pc. Thus
B(y) Pr(Y <y) NP(X '
E{f(O) n} =Nb(O) =N lim (Y =N lim = lim y Y , y y YO Y
= lim Expected number of animals within distance yhw of the trapping web's center
Y--->O Area of region within distance 8yh of the trapping web's center
= lim(Average density of animals over circle of area y, centered at trapping web's center)
=D, say.
The quantity D is a description of the center of the web; it is a local density, and has little relevance to the entire study area, unless the web center was chosen at random. In this case, the parameter D can be regarded as a random sample of size 1 of possible values of D within the study area, and hence an unbiased estimate (though possibly imprecise due to spatial variation in D) of the average value of D.
Alternatively, it can be assumed that the locations of animals are such that the expected number of animals in any region is proportional to the size of the region, with proportionality constant D. We refer to this as the homogeneity assumption. Under the homogeneity assumption, the need for random placement of the web center is avoided. We stress that the homogeneity assumption is not required either for the Fourier analysis or for the new analysis. Its importance is in interpreting the results of the analyses, and in defining the term "density."
This assumption might be considered to be too restrictive. If it is not reasonable to assume homogeneous distribution of animals, the following points need to be considered: First, random placement of the web center may not be feasible. Second, the value of information relevant only to the exact location of the trapping web's center is limited; the experiment is effectively a sample of size 1. Finally, it is likely that the estimate obtained will be considered a description of the entire study area (or at least the entire range of the web; e.g., Anderson et al. 1983, p. 677), rather than of a single point.
Without the homogeneity assumption, multiple trapping webs are needed. The variance of the average estimated density must account for sampling variability within webs and spatial variability among webs.
Clumping does not violate the homogeneity assumption. Instead clumping suggests a violation of
This content downloaded from 141.101.201.171 on Sat, 28 Jun 2014 12:51:20 PMAll use subject to JSTOR Terms and Conditions

Geometric Analysis of Trapping Web Data 735
a different assumption of the Fourier analysis-namely, that animal captures are independent events.
3. The Closest Trap Assumption Let n,. denote the number of distinct animals caught in the r-th ring. Conditional on there being a total of n captures, the vector (n1, n2, ..., nR)' is a multinomial random variable with cell probabilities Pi, i = 1, 2, ..., R, given by
pi= Pr{Captured in ring i|Captured}.
Let bi be the distance from the center of the web to the point halfway between the ith and (i + l)th rings of traps, and let ci = 7rb . (For the outermost ring, bR = bR 1 + d.) Anderson et al. (1983) state that as a consequence of the independence of capture events,
Cti Pi f (y) dy.
But if this is the case, then
pi = F(ci) - F(ci- 1)
= Pr{bi- 1 < X S bilCaptured}
= Pr{Located closest to ring ilCaptured},
which is not necessarily the same as Pr{Captured in ring ilCaptured}. The equality of these is not guaranteed even by the assumption that animal movement is stable with respect to the web. A somewhat stronger assumption is needed, which we refer to as the closest trap assilmption- namely, that for animals that are captured, the proportion of captures in a given ring is the same as the proportion of captured animals whose locations were closest to that ring. This is not an unreasonable assumption. Though not specifically mentioned in the list of assumptions of Anderson et al. (1983), it is stated in their description of the model: "The captures in the ith ring of traps should therefore be considered to arise from the ring defined by distance bi_-1 to bi" (p. 676).
It is not our purpose in pointing out this assumption to criticize the analysis of Anderson et al. (1983). The model is, after all, a model, and not necessarily a depiction of an exact mechanism. The model and associated estimation procedures need to be judged by how closely they approximate reality. The closest trap assumption, while perhaps not perfectly true, is a reasonable simplification of the complex problem of describing the movement of animals during the trapping period. We shall make use of (virtually) the same assumption in the analysis proposed in Section 5.
4. The Fourier Model for f(y) Given an estimate of the functionf(y), the density can be estimated by n f(O). Anderson et al. (1983) provide a means for estimatingf(y) using what they correctly refer to as "the Fourier series model" (our emphasis). Without a model, it is literally impossible to estimate a probability mass function for a continuous random variable at a single point. The model specifies that
F1 R (ri T a'X rCosI - Y) OY C R
f(y) =CR r= l CR /
o Y > CR,
where a , a2l ... IER are the unknown parameters. It is assumed that aj = 0 for] B m; likelihood ratio tests are advocated for determining the value of m.
We note two things about the Fourier model: first, that it is a model, albeit a very flexible one due to the potentially large number of parameters. Thus the Fourier analysis is not nonparametric.
A more important consideration is that it is assumed thatf(y) - 0 for y > CR. While it is true that
Pr{Captured at distance > CR from center to weblCaptured} = 0,
it seems unreasonable to assume that
Pr{Located at distance > CR from center of weblCaptured} = 0,
This content downloaded from 141.101.201.171 on Sat, 28 Jun 2014 12:51:20 PMAll use subject to JSTOR Terms and Conditions

736 Biometrics, September 1994
because of the movement of the animals. But the two should be the same, by the closest trap assumption.
This is not a trivial consideration. In practice, it is observed that an "edge effect" occurs: "an unusually large number of captures in the outermost ring of traps" (Parmenter et al., 1989, p. 172). The usual solution is "to truncate the data set, discarding the anomalous trap rings prior to analysis" (Parmenter et al., 1989; Anderson et al., 1983). This shortcoming is not restricted to the Fourier analysis; it is shared by any of the parametric analyses used in estimating f(0) [see Parmenter et al. (1989) for a discussion of alternative parametric analyses].
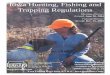
The problem with this procedure is its inherent subjectivity, and the sensitivity of the analysis to discarding outermost rings. Consider, for example, the Fourier model with m = 1. Thenf(y) appears as in Figure 1, the fitted curve for the truncated data of Anderson et al. (1983; the ring frequencies
0
0 000 0.25 0.50 0.75 1.00 Y (Hectares)
Figure 1. The Fourier model density estimate of Anderson et al. (1983), r-n 1, truncated data. Observed relative frequencies r-epresented by histogram. Note the symmetr-y of the Fourier curve
about the line f( y) 1/I cR (dashed line).
are reproduced in our Table 2). A straight line at f(y) =I /cRhas been included to highlight the fact that the Fourier model with m 1 forces a symmetry to the cujrve; in particular, f(O) i/1CR + al
andf(R) 1/R -a,. The value off f(y) in the innermost rings is strongly related to the value in the outermost rings. Large frequencies in the last ring includedJ will lead to low density estimates; small frequencies in the last ring included will lead to high density estimates. Consequently, the choice of a point at which to truncate rings is likely to have a substantial effect on the estimate rBuckland (1985) notes that "a careless choice of truncation point may lead to unreliable estima- tion"].
That this is the case is evident when comparing the fitted curves for in 1 for the full data set and the truncated data set. The larger number of captures in the outermost rings forces the fitted curve to have larger values for large y, and consequently smaller values for small y. In this case, the overall fit is satisfactory (X2 =17.18, degrees of freedom =18), but the density estimate is reduced rfrom ii 92.56 (13.40) to ii 84.54 (11.57); units are animals per hectare] because of the higher frequencies in the outermost rings. The fitted curves for full and truncated data sets, with m 1 and m 2, ar gie '1M 1inrP Fiur 2.T111 IneIthrcs w-as the fit impove by%x inluingiA"r -r
If th trp:r osdrdt ecmeigfrcpue,i sntsrrsn hteg fet shudb bevd Shoe 18)atepe omdlteedeefc saman=ooti ute inomto abu pouato destis Th_nlssta epooentefloigscin siial _niiae deefcs utemr,i aod h eest fetmtn igevleo
aigprobablit mass Founiemon. est siaeo nesne a.(93,m=1 rnae aa
This content downloaded from 141.101.201.171 on Sat, 28 Jun 2014 12:51:20 PMAll use subject to JSTOR Terms and Conditions

Geometric Analysis of Trapping Web Data 737 o 0
,C~ I ?' Truncated Dato Set Complete Daot Set
6 ~ ~ ~ ~ ~~~~~~~'
0 0.0 0.4 0.8 1.2 0 0.0 0.4 0.8 1.2
Y (Hectares) Figure 2. Comparison of Fourier model density function estimates, In 1 (dashed), in= 2
(solid), with and without truncation [data of Anderson et al. (1983)].
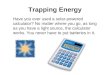
5. The Geometry of the Trapping Web Our approach to the analysis of trapping web data is essentially geometric. Consider the trap in the rth row and sth spoke of the web; we shall denote it by t,.,. The amount of competition between t,.s and other traps depends on their proximity. The closest trap assumption implies that the number of captures at t,.S is determined by the size of the region closest to trs* We refer to this region as the "maximum locus" of t,5. For rings 2, 3, ... , R - 1, the maximum locus of the traps is a trapezoid. For r = 1, the maximum locus is a triangle; for r = R, the maximum locus is unbounded, a sort of infinite trapezoid. Figure 3 shows the locations of traps in a web with R 5 and S 5, and their maximum loci.
00
Figure 3. Trapping web with S 5 and R 5, showing trapezoidal maximum loci of traps.
A trap's "locus of radius y" is the collection of points within distance y that are closer to the given trap than to any other; it is the intersection of a circle of radius y with center at the trap and the maximum locus of the trap. The shape of the locus of radius y is determined by the distance between
This content downloaded from 141.101.201.171 on Sat, 28 Jun 2014 12:51:20 PMAll use subject to JSTOR Terms and Conditions

738 Biometrics, September 1994
traps, the number of spokes, and the position of the trap within the web. Altogether, 17 different forms can be enumerated (12 of these are illustrated in Figures 4 and 5). The area of the locus of radius y is given for all 17 cases in the Appendix. For a given web (i.e., fixed values of R, S, and d), the area of the locus of radius y is determined by the ring r; we denote it by A,.(y).
Figure 4. Six possible forms of trap locus of radius y, for traps in ring r, 1 < r < R. The locus of radius y is the intersection of the circle and the trapezoid.
Figure 5. Six possible forms of trap locus of radius y, for traps in ring r = 1. The locus of radius y is the intersection of the circle and the triangle.
6. An Alternative Analysis for Trapping Web Data We begin by shifting our frame of reference from the center of the web to the spot at which an individual trap is located. Suppose that a single, isolated trap is located at a point to. Define X, Y, and gNc( y) in analogy with Section 2 as
This content downloaded from 141.101.201.171 on Sat, 28 Jun 2014 12:51:20 PMAll use subject to JSTOR Terms and Conditions

Geometric Analysis of Traipping Web Data 739
X= distance from a randomly selected animal to to,
Y = _rX2,
and
gNc(y) = Pr{Captured at tol Y = y, no competition between traps}.
Again, B(y) = Pr(Y S y). The subscript NC is included to indicate that there is no competition between traps for animals. In the absence of competition from other traps, the unconditional probability of capture at to would then be given by
cc PNC = | NC(Y) dB(Y).
Using the trapping web, however, there is competition between traps. Let t,.5 denote the trap in the rth row and sth spoke of the web, and let Pc,,., = Pr{Capture at t,.j}. Then
roc PC,rs = 7 gc,,.s(y) dB(y),
where gc .S is the probability that an animal located at a distance y from t,.s will be captured at t,.s, in the presence of competition between traps. The subscripts r and s indicate that the effects of competition will vary with the location of the trap. For all locations, gc,,s(y) S gNc(Y); the inequality will be greatest at the center of the web. The homogeneity assumption (or random placement of the web center) allows us to omit subscripts r and s from B(y).
We model the competition between traps using the closest trap assumption; thus,
gc,,.s(y) = Pr{Closest to t,.slDistance to trs = Y}gNC(Y).
Consider Figure 6. The expected number of animals in the annulus formed by the circles of radius y and y + dy is N{B(y + dy) - B(y)} = N{dB(y)}. The expected number of animals in this annulus that are also closest to t,.5 is the area of the intersection (the shaded region) times the population density, that is, D{dAr(y)}. Thus the foregoing assumption can be restated as
D{dA,(Y)} gc S(Y) =N{dB(y)} gNC(Y),
so that
Dr PC,rs =N NC(Y) dArY).
Figure 6. Geometric representation of {dA,(y)}.
This content downloaded from 141.101.201.171 on Sat, 28 Jun 2014 12:51:20 PMAll use subject to JSTOR Terms and Conditions

740 Biometrics, September 1994
For simplicity, we omit the subscript NC from gNc(y). It is natural to model g(y) as satisfying g(O) = 1, as in the Fourier analysis. It is also reasonable
to assume that g(y) is nonincreasing on [0, oc), and that g(y) tends to zero as y increases. For simplicity, we approximate g(y) by a step function taking the values 1, (k - 1)/k, (k - 2)1k, . . , 21k, l/k, 0 on k + 1 intervals [po = 0, Pi), [PI, P2), [P2, P3), * * [Pk-2, Pk-1) [Pk-I I Pk), [Pk Pk+ I )
respectively, where k < R - 1. The unknown parameters are the pi's and D. Thus
D k- ( k - D k
Pc ,s = N K k ){A,(pi+ ) - A,.(pi)} = Nk E A,.(pi). (1) Ni==O /~
We follow Anderson et al. (1983) in assuming that individual animal captures are independent events. In this case, conditional on the total number of first captures n, the vector of captures by ring (n1, n2, nR)' is a multinomial random variable with cell probabilities Tr, ' = 1, 2, . R, given by
k
E Ar(Pi)
IT.= . (2) R k
> > A,.(pi) r== A i=1
Estimates of the parameters pi can be obtained by maximum likelihood; substitution of these in (2) yields maximum likelihood estimators ,. Letting f,. = nfrr,., goodness of fit can be tested using Pearson's X2,
E (nfl ,- _ )2
or the likelihood ratio goodness-of-fit statistic,
R
G2 = 2 > n, log(n,lih,.).
These statistics are asymptotically equivalent, having the x2 distribution with R - k - 1 degrees of freedom (df) (see, for example, Bishop, Fienberg, and Holland, 1975). For small sample sizes there is evidence that the x2 distribution more closely approximates the distribution of X2 than that of G2 (Agresti, 1990, pp. 246-247). Note that we have pooled captures in rings. Further pooling may be necessary to avoid low expected frequencies.
Using (1), and letting n,.5 denote the number of animals captured at t,.s, it follows that
D k E(n,.) = SE(n,.) = S - Ar(pi),
and consequently that
D R k
E(n) = S X X A,(Pi).
We therefore propose the density estimator
kn R k
S > E> ,(i ,=~1 i==1
This content downloaded from 141.101.201.171 on Sat, 28 Jun 2014 12:51:20 PMAll use subject to JSTOR Terms and Conditions

Geometric Analysis of Trapping Web Data 741
The variance of 1 given n can be estimated using the delta method, using the estimated information matrix for the pi's (conditional on n). We denote this estimator by varest(D1n).
If data from m replicate trapping webs are available, and if there is spatial variation in density, the variance of the sample average D as an estimate of the true average density should be estimated by S2/m, where S2 is the sampling variability among the replicate b's. The spatial variability in densities is estimated by S2 - V, where V is the average value of varest(bln). Under the homogeneity assumption, the variability in the sample average 1 as an estimate of the true density should be estimated by V/rm.
We recommend that the analysis be carried out using different values of k, and that k be chosen in accordance with Akaike's information criterion, which is to minimize
AIC = -2(maximum log-likelihood - k),
or, equivalently, G2 - 2(df). [For fixed n,. s and R, G2 and AIC differ only by a constant; see Agresti (1990) for details.]
7. An Example Anderson et al. (1983) applied the Fourier analysis to capture data on Peromyscus spp. from a trapping web consisting of 16 lines (S = 16), each comprising 20 live traps (R = 20). Their estimate D = 92.56 (13.40) was obtained with m = 1, and having truncated data from the last two rings due to suspected edge effect.
We analyzed the same data under the new modelling procedure, obtaining estimates for models with k = 1 and 2; using the AIC criterion, the fit was not substantially improved using k = 2. A summary of the parameter estimates is given in Table 1.
Table 1 Parameter estimates and estimated standard errors for geometric analyses of capture data on Peromyscus spp. from a trapping web experiment. [Raw data, from Anderson et al. (1983),
are summarized in our Table 2.] ~~~~~~~~~~~~~~~~~G 2
k ?1 (se) P2 (se) b (se) (p-value) AIC 1 7.497 (1.283) 87.11 (10.97) 14.04 (.66) -19.96 2 2.437 (.795) 8.390 (1.497) 120.34 (16.35) 13.69 (.62) -18.31
Table 2 Observed capture frequencies and expected frequencies from Fourier analysis of Anderson et al.
(1983) and from the model described in Section 6. Note that the Fourier analysis does not provide fitted values for the outermost rings.
Geometric Geometric Ring Observed Fourier k = 1 k = 2
1 1 .59 .56 .77 2 1 1.05 1.00 1.38 3 0 1.57 1.50 2.07 4 6 2.09 2.00 2.68 5 2 2.61 2.50 3.04 6 2 3.11 2.99 3.38 7 3 3.61 3.49 3.73 8 2 4.08 3.99 4.07 9 4 4.52 4.49 4.42 10 7 4.92 4.99 4.76 11 4 5.27 5.48 5.11 12 5 5.56 5.98 5.45 13 8 5.79 6.23 5.79 14 6 5.96 6.23 6.09 15 7 6.10 6.23 6.13 16 6 6.22 6.23 6.13 17 7 6.36 6.23 6.13 18 5 6.59 6.23 6.13 19 9 -6.23 6.13 20 13 -15.42 14.61
This content downloaded from 141.101.201.171 on Sat, 28 Jun 2014 12:51:20 PMAll use subject to JSTOR Terms and Conditions

742 Biometrics, September 1994
The new analysis yields parameter estimates describing the effectiveness of the traps, if they were operating in isolation; for example, the fitted model with k = 2 indicates that all of the peromyscus within 2.438 meters of an isolated trap would be captured and that half of the peromyscus between 2.438 and 8.390 meters of an isolated trap would be captured.
The new analysis allows inclusion of the outermost rings, and provides a satisfactory fit to them, whereas the Fourier analysis requires their exclusion. Table 2 gives a summary of the observed and expected frequencies under the Fourier analysis and under the new analysis with k = 1 and 2.
8. Discussion The analysis described in this paper differs from previous analyses of trapping web data in that the competition between traps is modelled geometrically. The new model characterizes an animal's probability of capture in the rth ring of spoke s, as
Dr C,rs = N g(y) dA,(y),
where g(y) is a monotone function satisfying g(0) = 1, g(cc) = 0, representing the probability that an animal located at distance y from an isolated trap will be captured. The new model anticipates and accommodates edge effects, and avoids the subjective process of truncating outermost rings.
We have recommended approximating g( y) by a step function; it would also be possible to specify that g(y) be a member of some parametric class of functions, such as
g(y) = 1 - exp(-Ay), A > 0,
or
exp(-18y){l + exp(a)} g (y) + exp( a - 8y) <a , 130,
and to estimate the unknown parameters. Despite the complexity of the functions A,.(y) used in the new analysis (see Appendix), the
underlying notion of the new analysis is simple: the competition between traps has been modelled geometrically, by considering the relative sizes of the regions closest to them. The same idea could be applied to data obtained from traps laid out in configurations other than that of the trapping web.
ACKNOWLEDGEMENTS
We wish to express our appreciation to James D. Nichols, John R. Sauer, and Kenneth P. Burnham for reviewing an earlier draft of this paper. We also thank two anonymous referees for providing helpful comments.
RESUME
Les densit6s de population chez les petits mammiferes et les arthropodes peuvent etre estim6es a partir des fr6quences des captures faites dans un r6seau de pieges. Anderson et al. (1983, Ecology 64, 674-680) adapterent la m6thode du quadrillage a l'analyse de telles donn6es. Ce papier propose une analyse g6om6trique simple qui 6vite d'estimer ponctuellement la fonction de densit6. Cette analyse presente l'avantage d'incorporer des donnees provennant de pieges situ6s sur des couronnes p6ripheriques, incorporant dans le modele explicatif les captures de taille 6lev6es dans ces regions, plutot que de les supprimer de l'analyse.
REFERENCES
Agresti, A. (1990). Categorical Data Analysis. New York: Wiley. Anderson, D. R., Burnham, K. P., White, G. C., and Otis, D. L. (1983). Density estimation of small
mammal populations using a trapping web design and distance sampling methods. Ecology 64, 674-680.
Bishop, Y. M. M., Fienberg, S. E., and Holland, P. W. (1975). Discrete Milltivariate Analysis: Theory and Practice. Cambridge, Massachusetts: The MIT Press.
Buckland, S. T. (1985). Perpendicular distance models for line transect sampling. Biometrics 41, 177-195.
Burnham, K. P., Anderson, D. R., and Laake, J. L. (1980). Estimation of Density fromtl Line
This content downloaded from 141.101.201.171 on Sat, 28 Jun 2014 12:51:20 PMAll use subject to JSTOR Terms and Conditions

Geometric Analysis of Trapping Web Data 743
Transect Sampling of Biological Populations. Wildlife Monographs. Louisville, Kentucky: The Wildlife Society.
Parmenter, R. P., MacMahon, J. A., and Anderson, D. R. (1989). Animal density estimation using a trapping web design: Field validation experiments. Ecology 70, 169-179.
Schroder, G. D. (1981). Using edge effect to estimate animal densities. Journal of Mammology 62, 568-573.
Received May 1992; revised October 1992 and Febrtuaiy 1993; accepted Febrtualy 1993.
APPENDIX
Trap Loci of Radius y
As defined in Section 5, a trap's "locus of radius y" is the collection of points closest to the trap that are also within y of the trap. For 1 < r < R, the locus is the intersection of a circle and a trapezoid. The six possible cases are shown in Figure 4.
The following notation is convenient for describing A,( y), the size of the locus of radius y of a trap in the rth ring:
6= =IS
T1(y) = rd cos2(0) + cos(6)1y2 - r.2d2 sin2(6),
T9(y) = i d cos2(0) - cos(6) Vy2 - I'2d2 sin2(6),
f(x, y) = xVy2 -x2 + y2 sin-1(x/y).
For 1 < r S R, the form of the locus of radius y can be determined by consulting the following outline:
(A) y : d12 (1) y S (d2)1+ 2r+12tan2(0)
(a) y (dl2)\1 + (2r - 1)2 tan2(0)
(i) T1(y) < (r +) d tan(6) and T2(y) - (r - 9) d tan(6) (ii) T1(y) > (r + 9)d tan(6) or T2(y) < (r - 9)d tan(6)
(b) y > (dl2)\/I + (2r - 1)2 tan2(0) (2) y > (d/2) /1 + (2r + 1)2 tan2(0)
(B) y < d/2 (1) y : rd sin(6) (2) y < rd sin(6)
Under (A)(1)(a)(i) (bottom left of Figure 4),
A.(y) = tan(6){T2(y) - T2(y)} + f{rd - T(y), Y}
- f{td - T2(Y), Y} +f , Y} -4- ), Y r< R,
and
A,.(y) = tan(){lT2(y) - T2(y)} + f{rd - T1(y), Y
[d 7TFy2 - f{rd - T,(y), Y} + fj Y + r=R.
Under (A)(1)(a)(ii) (bottom center, Figure 4),
A,(y) = 4y2 - d2 + 2y2 sin-1t-, r < R,
and
A(Y) 4 - Y42 {2y))
This content downloaded from 141.101.201.171 on Sat, 28 Jun 2014 12:51:20 PMAll use subject to JSTOR Terms and Conditions

744 Biometrics, September 1994
Under (A)(1)(b) (bottom right, Figure 4),
Ay(y) = tan(0)t T2(y) - (2r - 1)2} +f{rd - Tj(y), y} - 4, - r<R,
and
A.(y) = tan(6) TI(y) - - (2r - 1)2j +f{d - TI(y), y} + 2 -= R.
Under (A)(2) (top left, Figure 4),
A.(y) = 2rd2 tan(0), r < R,
and
A(y) = tan(6)1TI(y) - - (2r - 1) +f{rd-TI(y), Y} + 2' * R.
Under (B)(l) (top center, Figure 4),
A,.(y) = 2rd sin(6)V y2 - i.2d2 sin2(0) + 2y2 sin-' i{ 4 , i R.
Under (B)(2) (top right, Figure 4),
A,.y) - WTY2 r -R
For r = 1, the locus of radius y is the intersection of a circle and a triangle. We have described these loci under the assumption that the first ring of traps is at a distance d from the center of the web [as with the data presented in Anderson et al. (1983)]. Six of the seven possible cases are illustrated in Figure 5.
For r = 1, the form of the locus of radius y can be determined by consulting the following outline:
(A) p S d12 (1) p < d sin(0) (2) p > d sin(0)
(B) dl2 < p S d (1) p S (d12)N1 + 9 tan2(0)
(a) p S d sin(0) (b) p > d sin(0)
(2) p > (d12)V1 + 9 tan2(0)
(C) p > d (1) p S (dl2)\/1 + 9 tan2(0) (2) p > (dl2)\/i + 9 tan2(0)
Under (A)(1) (not pictured), A,(p) =Tp2. Under (A)(2) (bottom row, right, Figure 5),
A,(y) = 2d sin(6) Vy2 - d2 sin2(0) + 2y2 sin-itd sin()}
Under (B)(1)(a) (middle row, center, Figure 5),
rp2 d) A,.(p) = 2 -
Under (B)(1)(b) (middle row, right, Figure 5),
A,.(y) =tan(6){T2l(y) - 72(Y)} +f{d - Ti(Y), y} -f{d - T2(Y), Y} + 2 -ft -, 4'Y
This content downloaded from 141.101.201.171 on Sat, 28 Jun 2014 12:51:20 PMAll use subject to JSTOR Terms and Conditions

Geometric Analysis of Trapping Web Data 745
Under (B)(2) (middle row, left, Figure 5),
[9d2 lTrp A,(y) = tan(O){ - - T2(y)4-f{dT9-(Y), Y} 2
Under (C)(l) (bottom row, left, Figure 5),
d A,.(p) =f{d - Tj(p), p} -fl- 2 4 + tan(6)TO(p)I
Under (C)(2) (bottom row, center, Figure 5), A,.(p) = (9/4) d2 tan(0).
This content downloaded from 141.101.201.171 on Sat, 28 Jun 2014 12:51:20 PMAll use subject to JSTOR Terms and Conditions