Embed Size (px)
Citation preview
Deon BlaauwModular Robot Design
University of StellenboschDepartment of Electric and Electronic Engineering

Why Design a Robot? During the Last Decade a Renewed Interest in the
Field of Robotics – Most Research Involving Multi-Robot Teams
Today, Robots are Used to Explore Terrain Dangerous or Inaccessible to Humans
Aim is to Develop a Modular Embedded Autonomous Agent (Robot) that can be Upgraded and Expanded as needed
Primary Goal – First Prototype Must Be Modular Enabling Different Versions with Different Capabilities to Be Developed from the Base Model
Secondary Goal - First Prototype Will Demonstrate Engineering Principles to Prospective Students
Achieving Flexible Design
The Current Robot Exists out of Layers, With Each Additional Layer Improving Overall Robot Functionality
Layers are Asynchronous Modules Communicating With Each Other – Each Individual Module Possesses Some form of Computational Ability
For the Robot to Achieve More Complex Tasks, Higher Level Modules With Extra Responsibilities can be Added
The Result of the Design is a Very Flexible and Expandable Robotic Vehicle
Base Prototype Overview
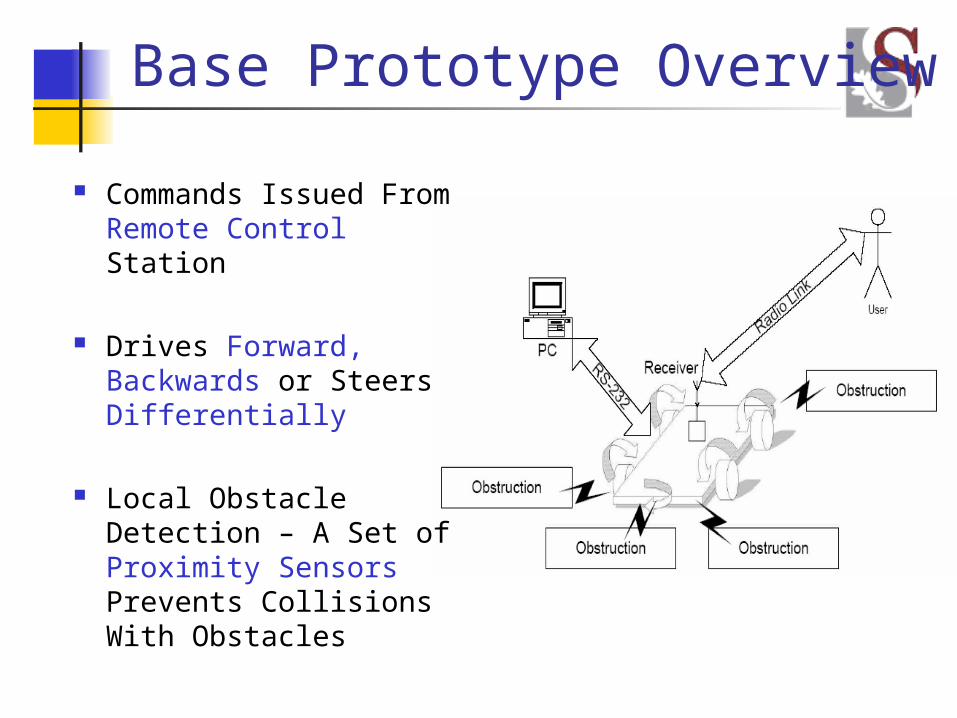
Commands Issued From Remote Control Station
Drives Forward, Backwards or Steers Differentially
Local Obstacle Detection – A Set of Proximity Sensors Prevents Collisions With Obstacles
Enabling Motion
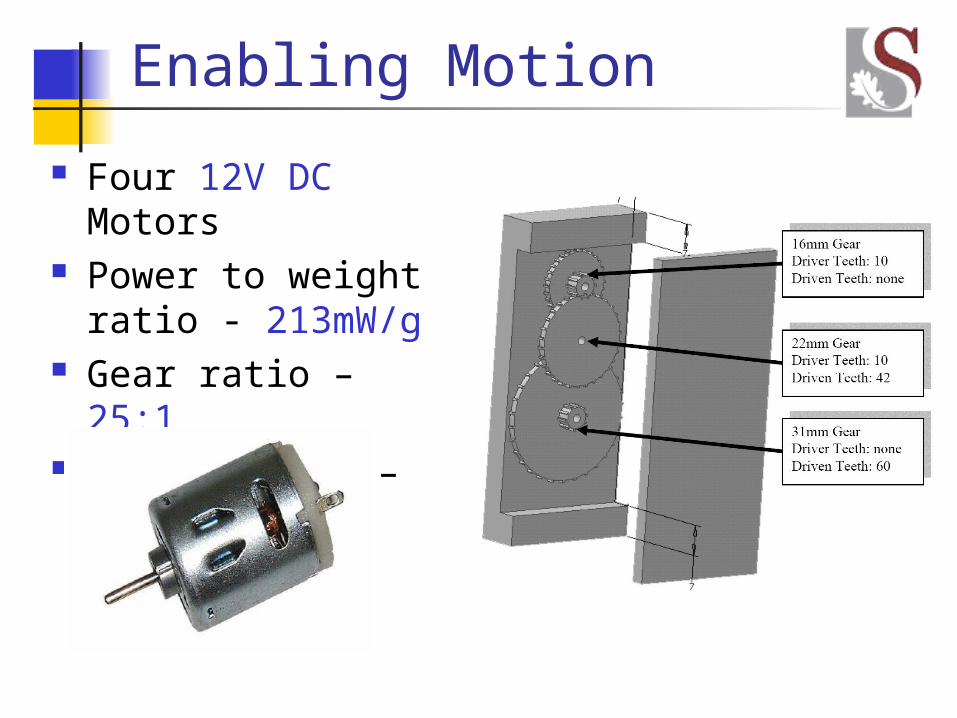
Four 12V DC Motors
Power to weight ratio - 213mW/g
Gear ratio – 25:1 Robot Weight –
2kg
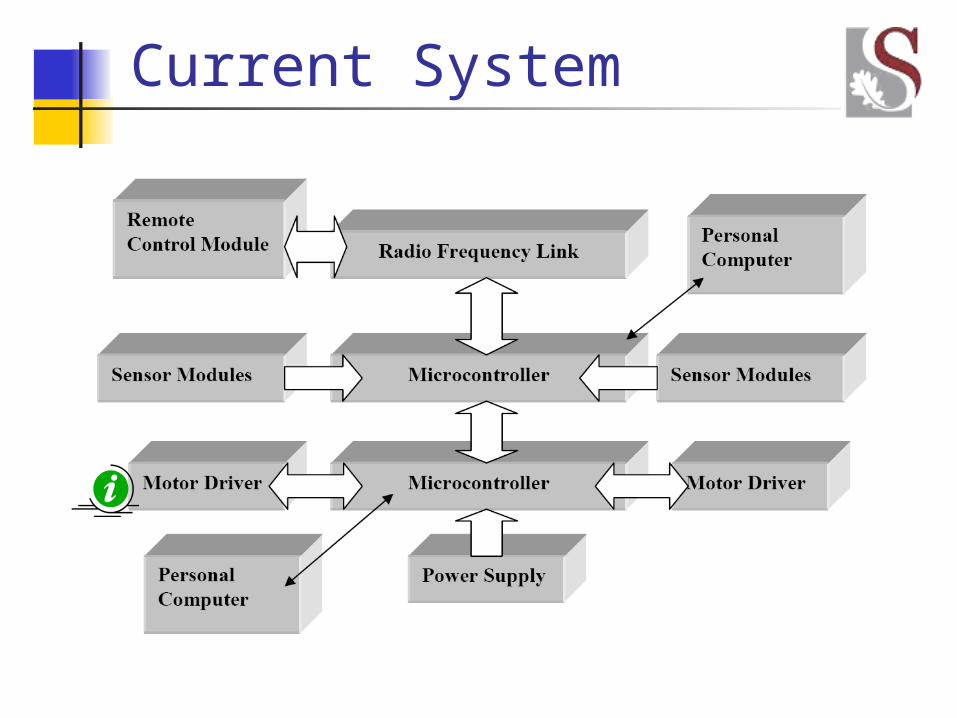
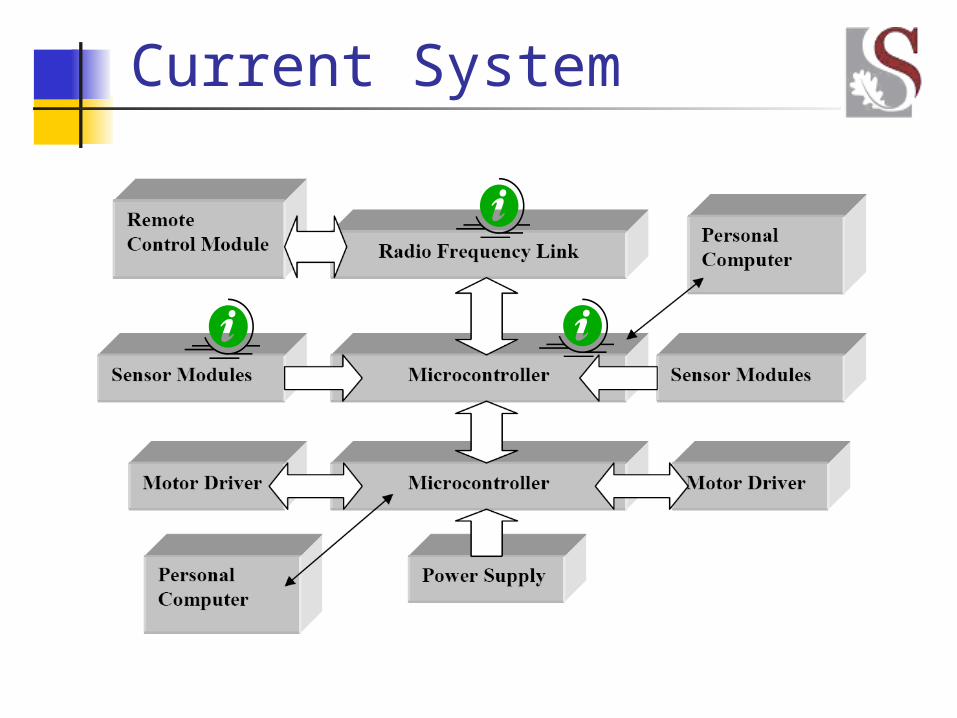
Current System
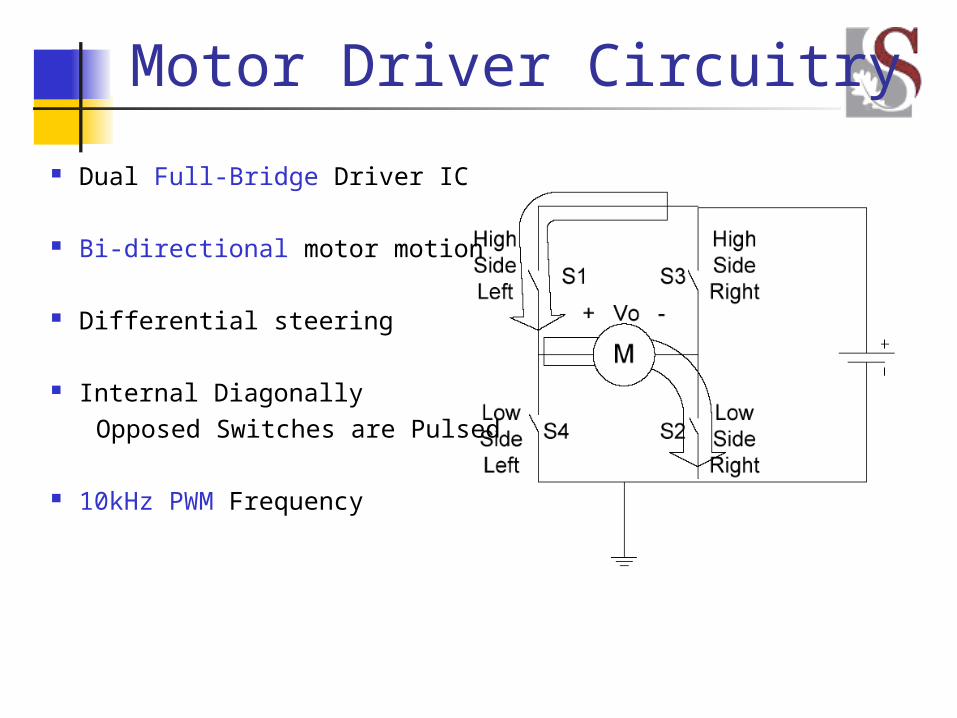
Motor Driver Circuitry
Dual Full-Bridge Driver IC
Bi-directional motor motion
Differential steering
Internal Diagonally Opposed Switches are Pulsed
10kHz PWM Frequency
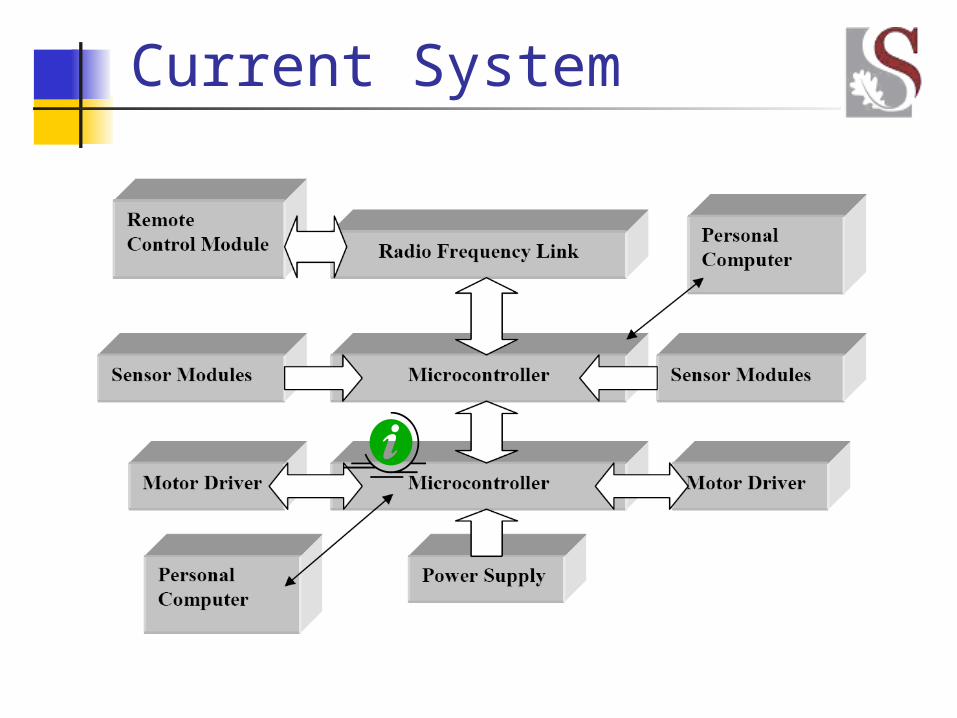
Current System
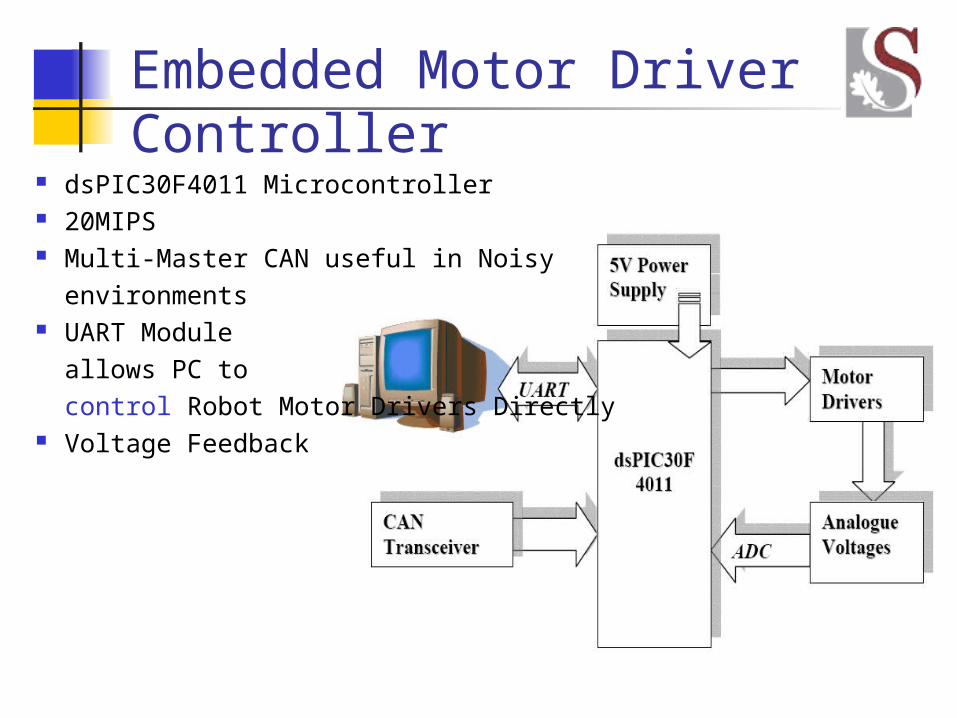
Embedded Motor Driver Controller
dsPIC30F4011 Microcontroller 20MIPS Multi-Master CAN useful in Noisy
environments UART Module
allows PC to control Robot Motor Drivers Directly
Voltage Feedback
Current System
Embedded Sensor and Radio Communication Controller
Monitors Cheap Infrared Proximity Sensors – Detects Reflected Infrared Light from Objects Between 400mm and 600mm away. Every Sensor Has Unique Operating Frequency – This Limits Sensor Cross-Talk
Sends Commands to Motor Controller Module via CAN at 833kbps
Supports 1.25MHz SPI Interface for Radio Link
UART Enabled Allowing Direct Computer Control of Sensors and Data Link
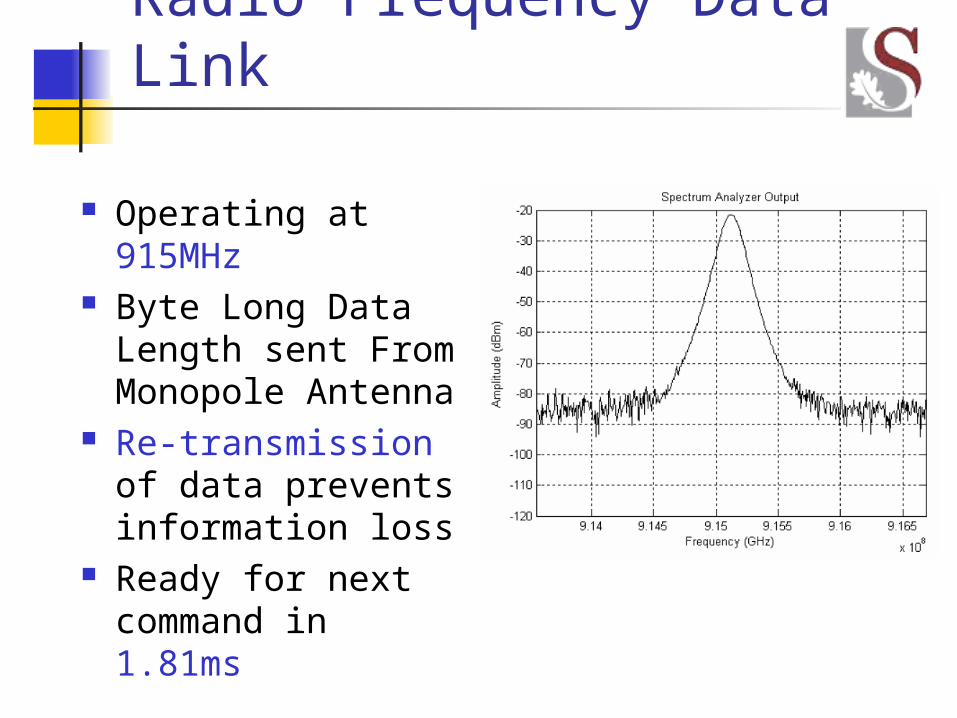
Radio Frequency Data Link
Operating at 915MHz
Byte Long Data Length sent From Monopole Antenna
Re-transmission of data prevents information loss
Ready for next command in 1.81ms
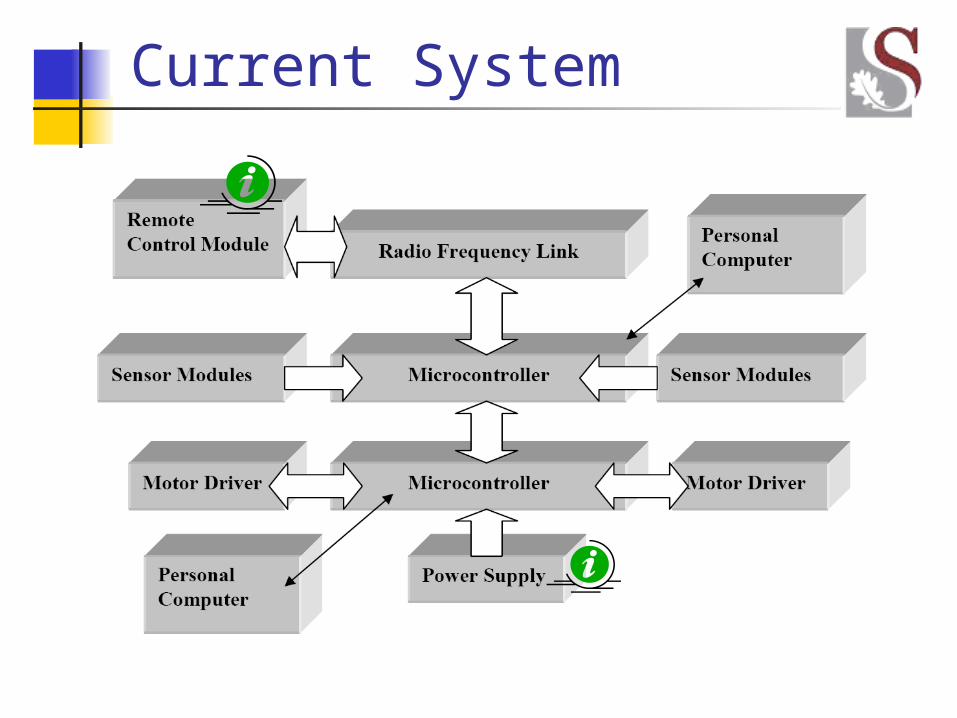
Current System
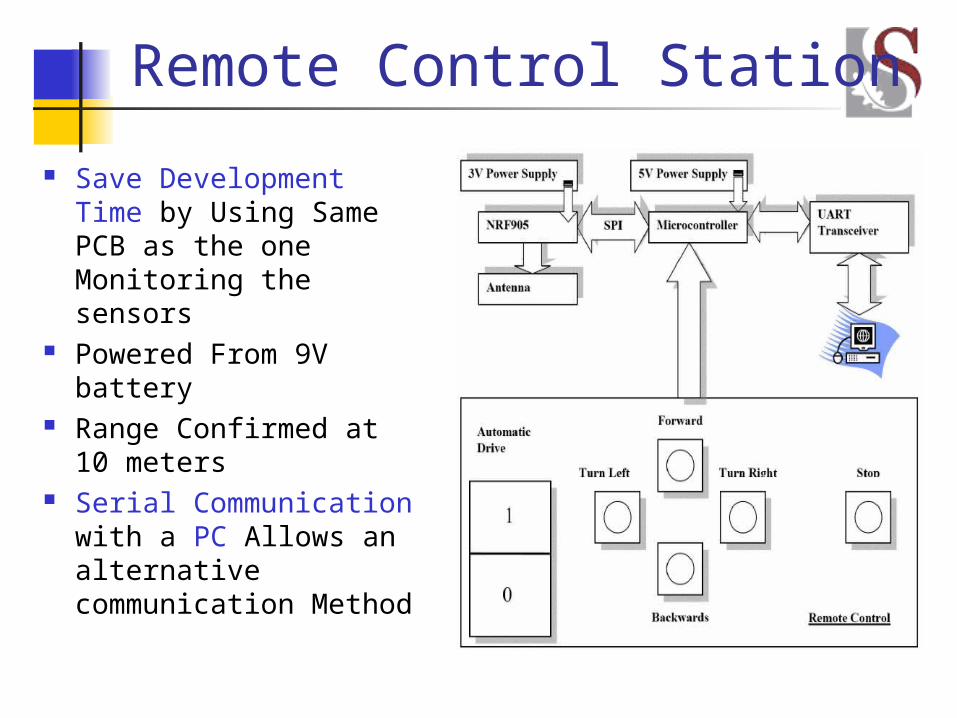
Remote Control Station
Save Development Time by Using Same PCB as the one Monitoring the sensors
Powered From 9V battery
Range Confirmed at 10 meters
Serial Communication with a PC Allows an alternative communication Method
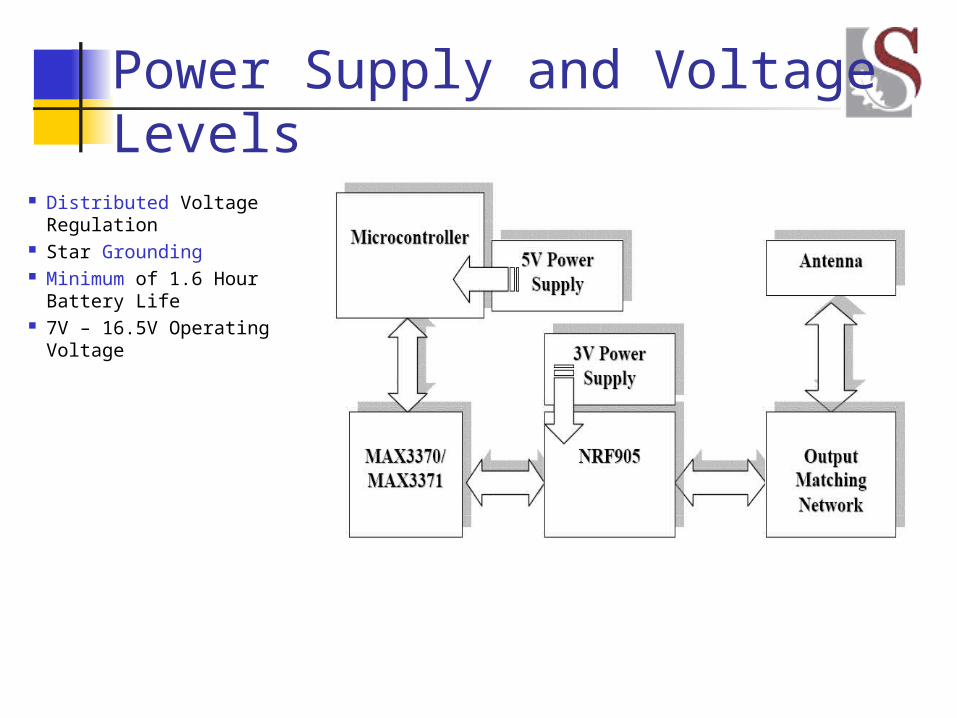
Distributed Voltage Regulation
Star Grounding Minimum of 1.6 Hour Battery
Life 7V – 16.5V Operating Voltage
Power Supply and Voltage Levels
Conclusion Highly Modular Design Approach Using a CAN Interface was
Followed - Simplifies the Addition of Further Functionality and Allows Expansion of the Current Prototype
The Current Prototype Has Four Full-Bridge Drivers Controlled By a Dedicated Microcontroller
A Separate Microcontroller Controls Proximity Sensors Aiding in Collision Avoidance
An External Controller Communicates via Radio Link With Robot Receiver Sub-System.
Able to Act as Test-Bed for a Variety of New Technologies and Clearly Illustrates a Broad Array of Applied Engineering Principles
Conclusion Some Engineering Principles Employed During
Development:
Power Electronics Embedded Programming Digital Circuits Analog Electronics Radio Frequency Communication Power Supply and Grounding Techniques Physics Mechanical Design
Prospective Students are Shown that Applied Engineering Sciences can Lead to Exciting and Very Rewarding Projects
Demonstration





























