Embed Size (px)
Citation preview

590 Nuclear Instruments and Methods in Physics Research A270 (1988) 590-597 North-Holland, Amsterdam
D E S I G N A N D I M P L E M E N T A T I O N O F A P O R T A B L E C O M P U T E R I Z E D A X I A L T O M O G R A P H Y
S Y S T E M F O R F I E L D U S E
W i l l i a m H. M I L L E R
Nuclear Engineering Program, University of Missouri, Columbia, Missouri 65211, USA
Received 1 September 1987 and in revised form 30 November 1987
A prototype, portable computerized axial tomography (CAT) scanner for in-field use has been designed, built and tested by researchers at the University of Missouri - Columbia. The device weighs 24 kg (53 lbs), is battery-powdered (providing eight hours of use without recharge), and fits into two small suitcases. A typical scan provides a low resolution (1.0 cm) image of an object 30 cm (12 in.) in diameter with a density of 0.65 g/cm 3 in eight minutes of imaging and data reconstruction time. The resulting image is displayed in the field on the system's portable computer system.
1. Introduction
The use of computerized axial tomography (CAT) has become an important and widely used technology in the medical field. Researchers are now implementing this technique to a variety of industrial applications. Over the past decade, various nonmedical devices have been constructed and tested [1-13]. Most of these de- vices, however, are similar in size and complexity to their medical counterparts. None are truly portable. This paper describes the development and initial testing of a lightweight, portable CAT scanner for in-field imaging of objects of interest. The design has focused on a device that can be carried by a single individual, is battery-powered, and can produce and display an image in the field in a few minutes. Specifically, this device is being applied to the inspection of wooden utility poles to determine the extent of internal voiding due to decay or rot.
With respect to the first criterion, initial estimates were for a device weighing less than 45 kg (100 lbs). The device must also be as compact as possible to fit closely around the object to be imaged. (This is particularly true for the imaging of wooden utility poles in which most decay occurs at or below groundline and excava- tion is necessary to test at this level.) Within the con- straints of size and weight, there is a necessary trade-off between the radiation source strength, scanning time, and the spatial and density resolution of the resulting image. It was assumed that a spatial resolution of approximately 1 cm (0,4 in.) would be sufficient for most field applications. A design target of density accu- racy of _+ 2% was assumed, as was a scanning time of less than 5 rain for low density (0.5-1.0 g / c m 3) objects up to 30 cm (12 in.) in diameter. In practice, the current, prototype device weighs 24 kg (53 lb) and can image a 30 cm (1 ft.) diameter wooden pole in 8 min with a spatial resolution of 1.5 cm (0.6 in.) resolution and a density accuracy of _+ 4%.
2. Design considerations
For a CAT scanner to be useful in field applications, specific criteria must be established for the design. These criteria are primarily related to designing a device that is (1) small, lightweight, and battery-powered for use in remote locations (possibly hand-carried by a single individual); (2) fast enough in scan and image reconstruction time to provide data in a reasonable amount of time (ideally under 10 min); and (3) capable of providing sufficiently accurate images to provide meaningful information.
0168-9002/88/$03.50 © Elsevier Science Publishers B.V. (North-Holland Physics Publishing Division)
3. Portable scanner design
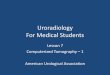
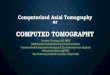
Fig. 1 is a sketch and a photo of the current scanner, and fig. 2 is a block diagram of the system. The compo- nents are described in the text following.
3.1. Source
Size, weight, and power requirements precluded the use of an X-ray source, as is utilized in medical CAT scanners. The alternative was a radioactive isotope with

IV.H. Miller / Portable computerized axial tomography system 591
D e t e c t o r Modu 1 •
SLde View
p p o r t ~ing
M o d u l e
Fig. 1. Portable scanner.
I Toshiba I I O0 Plus 1 Computer
~ RS-232 Interface
. . . . . . . . . . . . . . . . . . . . . . S i n g l e B o a r d
Computer
I Pa,*e Co°n, r I Circuitry / ....... S StepperMotor ~ ~ }
~+67VJ L Drive Circuitry J
~ ~ Detector Motor Source Motor
Source Detector Fig. 2. System block diagram.
a long half-life (on the order of years) and an ap- propriate energy for low density objects. To determine this energy, the relationship developed by Grodzins [14] was used:
i~ = 2 / D , (1)
where D is the diameter of the object of interest and /~ is the linear attenuation coefficient. This equation satis- fies the condit ion of min imum scan time for a given material at a given resolution sensitivity. For a 30 cm (1 ft.) diameter wooden pole with a nominal density of 0.5 g / c m 3, the opt imum energy is approximately 100 keV. One of the more readily available sources in this energy range is 241Am, which has a primary gamma-ray energy of 60 keV and a half-life of 432 yr. This energy is somewhat lower than the opt imum specified above, but is ideal for any smaller or less dense objects. A scanner designed for use primarily on larger objects (such as transmission-sized poles which axe up to 50 cm (20 in.) in diameter) may benefit from a higher energy source.
The source strength was determined next, ideally to be as large as possible to minimize scanning time and maximize image quality. However, the amount of shielding required to minimize personnel exposure and the physical size of the source (so as to closely ap- proximate a point source) places limits on this source strength. A commercial ly available, 200 mCi 241Am source with a source area of 5 mm was chosen for the

592 W.H. Miller / Portable computerized axial tomography system
prototype scanner. This source strength is effectively shielded with 3 cm (1.2 in.) of lead alloy shielding material to near background levels at the surface of the shield.
count rates are below 10 000 cps and no corrections are necessary.
3. 3. Computer system
3.2. Detector
Unlike medical CAT scanners that measure trans- mission data using current mode with subsequent ana- log-to-digital conversion, the use of a relatively small 241Am source strength, dictates the use of pulse mode counting. Because of this, only two detection systems are applicable for this design: scintillation detectors (with associated photomultiplier tubes operating in pulse mode) or solid state detectors.
A CdTe semiconductor detector from Radiat ion Monitoring Devices, Inc. (RMD) [15], was chosen for this application. This detector eliminates the need for photomultiplier tubes and high voltage power supplies associated with scintillation type detectors. The detector has an active diameter of 1.4 cm (0.55 in.), closely approximating the preliminary design specification reso- lution of 1 cm (0.4 in.). Its 2 mm thickness produces an intrinsic efficiency of 80% at the source energy of 60 keV. The R M D detector and its associated preamplifier weigh less than 0.2 kg (0.5 lb), and the preamplifier is only 5 × 2 × 2 cm in size, making the entire detector system very compact. The preamplifier uses both + 12 V and - 12 V supplies, and the detector requires a + 60 V biasing voltage. These power needs are easily sup- plied with batteries.
For the pulses from the detector, a simple LM 314N comparator circuit is used to generate a square wave, TTL compatible pulse suitable for counting. The detec- tor's preamplifier produces a 150 mV negative pulse corresponding to a gamma ray of 60 keV. By biasing the second input of the comparator to a negative 50 mV through a variable resistor, a simple threshold bias is set.
When using a detector in pulse mode, dead time corrections become a concern at high count rates. Specifications for the R M D CdTe detector suggest a maximum count rate of approximately 15 000 cps. (It is not known if this specification is intended to preclude dead time losses or if it is intended to eliminate spectral distortions due to pulse pileup when the detector is being used for spectroscopy measurements.) Count rates up to 50000 cps are present with the scanner when a ray-sum is being measured along the edge of an object (i.e., no attenuation of the source), so experimental data were taken to determine the detector's dead time. The system was found to have a dead time of approximately 3 /Ls, resulting in the need for a 15% correction at a count rate at 50 000 cps. This correction is written into the system software even though the majority of the transmission data is taken through the object where
A Toshiba T l l00 -P lus personal computer is being used as the main computer for this system. This computer is IBM compatible, is totally portable (with an internal battery providing eight hours of operation without recharge), weighs 4.5 kg (10 lbs), has two 760K, 3½ in. disk drives, and utilizes a 600 × 200 pixel LCD screen that is visible in direct sunlight. This computer represents one of the more recent developments in the portable computer field and is ideally suited for this application. Future computers will likely be available that will provide more capabilities in even smaller and lighter packages and will enhance the system even more.
The system has been programmed in compiled BASIC (see the next section concerning software de- tails). Reconstructed images are processed as the data is being collected, with an image displayed immediately on the screen following data acquisition.
A Z-8, single board computer [16] is used to control the scanner hardware. This computer contains 40K of R A M and ROM, two timers, several I / O ports for interfacing with the scanner system, and a 4800 baud, RS-232 interface to communicate with the T l l00 . It requires a single + 5 V power supply and additional + 12 V and - 1 2 V supplies for the RS-232 interface. The single board computer is programmed primarily in machine language, but it also has an on-board Tiny BASIC compiler to assist in communications and pro- gram development. This computer is responsible for routine tasks such as pulsing stepper motors, timing detector counts, and transferring data to the T l l00 . This frees the T l l 0 0 to reconstruct the image while data is being taken by the Z-8 computer.
3.4. Scanner hardware
To minimize the space required around the object for the scanner, a circular scanning motion is used for the source and detector (see fig. 3). This is similar to the fan-beam geometry used by medical scanners, but with some important differences. Fan-beam geometry typi- cally moves the detector in a constant radius about the source, which requires additional space around the ob- ject being imaged for the arc subtended by the detector. The geometry for this new system has the detector at a constant radius about the center of the object to be imaged. Geometr ic positioning corrections can be ap- plied to account for this difference, but fan beam recon- struction algorithms are more complicated, requiring approximations and additional computations to recon- struct the image. A cylindrical geometry, parallel beam scanning mode was developed in which the detector and

W.H. Miller / Portable computerized axial tomography system 593
O e t e r t o r
o n
Fig. 3. Scanning mode.
source are simultaneously moved on a circular arc for parallel beam transmission data to be measured. This scanning mode is believed to be unique. Corrections must be applied to the transmission data to account for changes in the source-to-detector distance for each ray- sum in a given projection, and for changes in the angle of incidence of the detector, which is no longer per- pendicular to the source at each measurement. These corrections are determined experimentally using a calibration routine in the software. Since the two effects tend to compensate for each other, the overall correc- tion is not large and is typically less than 4% across a projection.
The source and detector are moved around the ring using Superior Electric :g: MO61-FF-6201B stepper mo- tors. These motors use 2.8 V at 1.8 A (5 W) at steady state, which drops to about 1 W when in motion. Each pulse or step results in a 1.8 ° shaft motion, with a maximum speed of about 500 steps per second, or 2.5 revolutions per second. The Z-8 single board computer sends a prescribed number of pulses to each motor for necessary movements. Pulses are also speeded up and down by the Z-8 to provide necessary start-up and slow-down torque.
A simple aluminum ring with a thickness of 2.5 cm (1 in.) was fabricated using a 1.25 cm (1/2 in.) thick aluminum plate. The outer edge of the ring is flat to provide a surface for the friction drive of the splined stepper motor shafts, with the ring supported on the pole by three pins threaded for adjustment to different sized poles. Future designs may incorporate a geared ring for more accurate positioning, but the current system has a less than 0.5% cumulative positioning error during a typical scan. Later designs will also incorpo- rate several different sized rings for various pole sizes and a quick attachment system for mounting the system on the pole. Two positioning tabs have been placed on top of the ring and are sensed using an infrared source
and detector to insure the proper initial placement of the 241Am source and detector.
3.5. Battery supplies
The primary voltage supplies required for the com- ponents described above are: (1) a 4 V supply to the stepper motor switching circuit, providing the 2.8 V supply required by the windings themselves; (2) a 5 V supply for the Z-8 computer, miscellaneous TTL cir- cuits, and the infrared position sensing components; (3) two 12 V supplies (one positive and one negative) for the CdTe detector preamplifier and the RS-232 inter- face between the two computers; and (4) a 60 V supply for the CdTe detector bias. The Toshiba T l l00 com- puter has its own internal battery pack.
The only significant power requirements are for the stepper motors (averaging 0.5 A total while the motors are in motion) and the Z-8 single board computer (0.5 A). These needs are supplied with a single 6 V motor- cycle, lead-acid battery with 15 A h of capacity. The stepper motors are supplied by tapping off the first two cells, providing approximately 4 V as required. This battery is sufficient to operate the system for an eight hour day before recharging.
Two small, 1.2 A h, 12 V lead-acid cells are used to provide the _+ 12 V power requirements for the detector preamplifier and RS-232 interface. Finally, a 67.5 V Eveready dry cell is used for the detector bias. With the exception of this dry cell (which should last for over a year of in-field inspections), all of these battery systems can be recharged overnight using an automotive type 12 V battery charger.
4. System software
A filtered back-projection technique [17] is used to reconstruct images from the projection data. In general, the density function f (x , y) (which is the density at a given location (x, y)) is given by:
f ( x , y) = f 0P ( X cos q~ + y sin q~, q~) d•, (2)
where if(r, 0) is the projection data processed by an appropriate filtering operation. One of the more stan- dard filtering techniques is convolution filtering using a ramp filter [181 in which higher frequency components in the data are removed. This results in the following expression for the filtered projection data:
n
p( r~ ) - p(r~) l E P(ri) (3) 4w ~2W j=X,odd (i _ j ) 2 '
where p(ri) is the ray-sum at location r s, w is the spacing between adjacent ray-sums and the summation is taken over all j for which i - j is odd. These filtered

594 W.H. Miller / Portable computerized axial tomography system
projections are then back-projected into the image using eq. (2).
The above equations are implemented using com- piled BASIC on the Toshiba Tl l00 computer. One advantage of this reconstruction technique is that each projection can be processed independently as it is mea- sured, so that reconstruction can proceed concurrently with scanning. The use of the two computer systems also allows the Toshiba to be processing data while the Z-8 is acquiring the next ray-sum. In addition, some calculations can be performed beforehand and stored in matrix form in the Toshiba for quick access. This has been done for the (r, 0) to (x, y) transformation given by eq. (2) to eliminate the calculation of these indices during reconstruction.
For this design, 21 ray-sums per projection were assumed. This results in a spatial resolution of from 1 cm (0.4 in.) to 1.5 cm (0.6 in.) for objects between 20 cm (8 in.) and 30 cm (12 in.) in diameter. Theory suggests that the required number of views or projections, m 0, that will permit accurate image reconstruction is then given by [18]:
m o = 7rno/2 , (4)
where n o is the number of ray-sums, in this case 21. This suggests that approximately rn 0 = 30 angular views or projections are needed, resulting in 630 independent measurements. However, the number of nonzero density values in f ( x , y ) that must be determined is approxi- mately ~rno/4 or 346. Brooks [21] has therefore sug- gested that only
m o = ~rno/4 (5)
angular views or projections are required. This results in 16 angular views for 21 projections, or 336 independent measurements, approximately equal to the number of density values that must be determined. Since ad-
ditional angular views require additional data collection time, data with both 30 and 16 angular views were taken, as will be discussed below.
To test the reconstruction software, theoretical ray- sum data were calculated assuming both uniform den- sity objects and uniform density objects with a void at the center. These results are summarized in fig. 4, which gives the reconstructed density results along a single line drawn through the center of the object. As can be seen, ringing or oscillations are found in regions where the attenuation suddenly changes and is typical of many tomographic reconstruction techniques. In high resolu- tion medical scanners, this effect would occur in a few image pixels near discontinuities spanning a few milli- meters of the image at most. However, for the resolu- tion of the system being studied here, this effect encom- passes several centimeters of the image and produces significantly inaccurate results around the outside por- tion of the image. Chesler [19] has addressed this prob- lem and suggests taking the product of a Hanning window with a conventional ramp filter. The new filtered projection data, #(r i ) , becomes:
where ~(r i ) is given by eq. (3) above. One additional case, using one-half of the smoothing introduced by the Hanning window, was also studied, i.e.
These results are also given in fig. 4. Based on the data in fig. 4, it appears that the results
using eq. (7), where one-half of the smoothing of the Hanning window is applied to the filtered projection data, gives the best results. This filter eliminates the ringing effect at the edge of the object without excessive smoothing. The hole in the center of the object is not as
1.X-
1
8.8- I Density 6,6- 8.4- O.Z" B
R a d i a l D i s t a n c e A c r o s s Image
Pig 4 Results of smoot~ng on theoretical images
• F u l l S m o o t h i n g
[ ] l / z S m o o t h i n g
[ ] No S m o o t h i n g

W.H. Miller / Portable computerized axial tomography system 595
pronounced as it is without smoothing. However, for wooden pole inspection application, it is more im- portant to accurately predict the density around the edge of a pole, rather than in the middle, because the outer edge contributes most of the strength and carries most of the load when bending moments are applied to the pole. This latter reconstruction algorithm is there- fore used for subsequent tests of the system.
The rest of the software controls the system by communicating with the Z-8 computer through the serial RS-232 interface. Operator interface is provided by using keyboard "function" keys to initiate various routines to calibrate the system, to manually control movement of the stepper motors, to test the detector, to display a previously generated image, to take a new image, or to store an image. The system prompts the operator to provide an identification number or name for the image, the size of the object, and selected options with respect to the accuracy of the scan (i.e., the number of projections, the number of counts per ray- sum, etc.) As such, the prototype scanner system is user-friendly.
upon the amount of attenuation detected at each ray- sum, which is related to the amount of buildup for that ray-sum. This has improved the accuracy of the image by reducing the error in the middle of the image for the water phantom to less than 5%.
A gasoline phantom (with a density of 0.69 g /cm 3) using the same diameter as the water phantom was tested with this correction. Images were also taken on the gasoline phantom using both 16 and 30 angular projections. The resulting images are completely uni- form (within expected statistical fluctuations) across the center of the image, resulting in densities of 0.697 + 4.15% and 0.698 + 4.01% for the 16 and 30 angular
5. Scanner tests
5.1. Laboratory tests
Several tests of the scanner were performed in the laboratory prior to taking it into the field. The first tests utilized a water phantom of 20 cm (8 in.) diameter to test for image uniformity. Tests were taken assuming 4096 counts per ray-sum, corresponding to a count rate accuracy of 0.5%. Scans were made with 21 ray-sums per projection and both 16 and 30 projections. Initial results indicated a reasonably uniform image, but with a pronounced under-prediction of the density in the mid- dle of the image by approximately 10%. Several sources of error for this density variation were considered, including: (1) errors in the calibration (which account for the change in distance and angle of incidence be- tween the detector and the source), (2) errors in predic- ting the dead time of the detector, (3) errors created by the partial volume effect [20], particularly for pixels near the edge of the object being imaged, and (4) radiation buildup. Radialinn b,,ildup near the center of the object was found to cause additional counts to be recorded by the detector, thus making the density ap- pear less than it actually is. To correct for this effect the threshold of the detector was raised to eliminate the detection of scattered radiation. Due to the energy resolution of the detector, this also eliminates many of the unscattered radiation events, reducing the count rate and adding to the imaging time. As an alternative, a semiempirical correction factor was developed that cor- rects each ray-sum for buildup. This factor is based
Fig. 5. (a) Plexiglass phantom, (b) Image with 16 angular projections, (c) Image with 30 angular projections.

596 W.H. Miller / Portable computerized axial tomography system
projection cases, respectively. The increase in statistical uncertainty using 16 projections is very small (0.14%) considering that it takes almost twice as long to obtain the image using 30 projections. This timing factor will be discussed later in this section.
Another test utilized a plexiglass phantom 20 cm (8 in.) in diameter. Portions of the phantom were removed by drilling small holes to produce areas of reduced density (see fig. 5a). These areas include a center hole with a 1.3 cm (0.5 in.) diameter, randomly spaced areas 2.5 cm (1 in.) in diameter with densities of 75%, 91% and 96% of normal density, and other areas 1.3 cm (0.6 in.) in diameter, also with 75%, 91% and 96% of normal density. The resulting images are shown in figs. 5b and 5c. In both cases the presence of all of the areas of reduced density are visible in the image. The image using 30 angular projections is slightly more accurate in identifying the actual locations of the holes, but again the increase in accuracy is small compared to the ad- ditional time (approximately 7 min) required to take the addition data.
5.2. Field tests
The prototype scanner has been field tested on several occasions, locations, and on numerous wooden utility poles. In general the system has performed as expected
and has produced images in the field such as those shown in fig. 6. The amount of information contained in these scans in determining the interior condition of the pole is apparent.
Since time is one of the important factors in imaging most objects, the following is a breakdown of the time it takes to produce an image for a 30 cm (12 in.) object with a normal density of 0.65 g /cm 3. The data collec- tion time to obtain the necessary ray-sums is 5 min. This assumes 4096 counts per ray, and 21 ray-sums for each of the 16 views. The stepper motor positioning time to move the detector and source for each ray-sum is 2.5 min. Most of the calculations are performed by the computer while the next ray-sum is being taken, but some calculational overhead is required at the end of each projection, totalling an additional 0.5 min. Thus, the total time to acquire, calculate, and display the image is approximately 8 min. Since the software is written to require 4096 counts per ray-sum, smaller objects or those with internal voids) will be imaged more quickly. Conversely, larger objects will require more time to image, unless modifications are made to the present system, as will be discussed in the next section.
From these measured time intervals, the taking of 30 projections, rather than 16, would significantly increase the imaging time with little improvement in accuracy.
Fig. 6. Typical in-service pole images.

W.H. Miller / Portable computerized axial tomography system 597
By taking this additional data, the statistical uncertainty of the result is decreased since approximately twice as many counts are recorded and the resulting uncertainty becomes less. However, a similar improvement in image quality could be realized by taking approximately twice as many counts per ray-sum, which would result in the same total number of detected events without increasing the time required to move the detector and source to new locations.
6. Conclusions and future studies
a nearly op t imum scanning system has been developed for this particular application.
Acknowledgements
This work has been financially supported by the State of Missouri, Missouri Public Service Corp., Kansas City Power and Light, Union Electric Company, and St. Joseph Light and Power. Assistance has also been pro- vided by Osmose Wood Preserving, Inc., and Boone Electric Cooperative.
This work represents an interesting problem in desig- ning a CAT system of minimal size and weight that can give sufficiently accurate and useful images in a limited amount of time. Although not all original design criteria have been met, the system performs adequately, with future improvements possible.
In the specific application to the utility pole inspect- ion business, the system provides useful data concerning the interior condition of in-service poles that can be used to determine whether a pole should remain in service, should be replaced, or should be repaired.
One of the primary concerns about the commercial application of this system is the time required to obtain an image. The current time of 8 min for a 30 cm (12 in.) diameter wooden pole can be further reduced by a variety of techniques. The first would be to use multiple detectors, as is done on medical scanners. Since over one-half of the time necessary to produce an image is in the counting of the ray-sums, this part of the imaging time can be reduced by a factor of N, where N is the number of detectors. This would add little weight, size, or complexity to the system. Somewhat more powerful stepper motors could also be used to decrease the time required to position the source and detector. The cur- rently used battery system has sufficient capacity to provide the additional power requirements.
For larger objects (such as transmission-sized poles), the source strength a n d / o r the source energy can be increased. The 200 mCi 241Am source does not impose any shielding or personnel dose problems, making pos- sible the use of a larger source. Another approach could be the use of a larger area detector to increase the detector efficiency, which might necessitate the use of a scintillation-type detector system. Future advances in CdTe detectors could possibly provide the necessary increase in detector efficiency.
The prototype system demonstrates the feasibility of using CAT methodology to one application other than medical, in particular, the nondestructive imaging of in-service wooden utility poles. The design has focused upon necessary tradeoffs between size, weight, complex- ity, imaging time, and image quality. It is believed that
References
[1] D.W. Sweeney, Trans. Am. Nucl. Soc. 21 (1975) 101. [2] G.A. Schlapper et al., Trans. Amer. Nucl. Soc. 26 suppl.
(1977) 39. [3] Kruger, R.P., T.M Cannon, A.S. Lundy and R.A. Morris,
Image Understanding Systems and Industrial Appli- cations 155 (1978) 178.
[4] P.A. Schlosser, A.C. DeVuono, F.A. Kulacki and P. Munshi, IEEE Trans. Nucl. Sci. NS-27, (1980) 788.
[5] F.F. Hopkins, I i . Morgan, H.D. Ellinger, R.V. Klinksiek, G.A. Meyer and J.H. Thompson, IEEE Trans. Nucl. Sci. NS-28 (1981) 1717.
[6] W.B. Gilboy and J. Foster, Research Techniques in Non Destructive Testing, vol. 6, ed. R.S. Sharpe (Academic Press, 1982) p. 256.
[7] B.S. Chaing, S.R. Cautam, F.F. Hopkins and I.L. Morgan, IEEE Trans. Nucl. Sci. NS-30 (1983) 1671.
[8] A. Habermehl, Arboricultural J. 6 (1982) 1. [9] A. Habermehl, ibid., p. 121.
[10] G.W. McMillin, Forest Products Res. Soc. 14, No. 3 (1982) 97.
[11] M. Onoe, T.W. Tsao, H. Yamada, H. Nakamura, J. Kogure, H. Kawamura and M. Yoshimatsu, IEEE Trans. Nucl. Sci. 71 (1983) 907.
[12] B.V. Funt, and E.C. Bryant, Forest Products J. 37, no. 1 (1987) 56.
[13] W.H. Miller, Trans. Am. Nucl. Soc. 52 (1986) 350. [14] L. Grodzins, Nucl. Instr. and Meth. 206 (1983) 541. [15] Cadmium Telluride Detector Specifications, Radiation
Monitoring Devices, Inc., 44 Hunt Street, Watertown, MA 02172, USA.
[16] Slim Z-8 Controller/Computer User's Manual, Kustem Data Services, Inc., P.O. Box 734, Franklin Park, NJ 08823, USA.
[17] R.A. Brooks and G. di Chiro, Phys. Med. Biol. (1976) 689. [18] R.A. Brooks, Medical Physics of CT and Ultrasound:
Tissue Imaging and Characterization, eds. G.D. Fullerton and J.A. Zagzebshi (American Institute of Physics, New York, 1980).
[19] D.A. Chesler and S.J. Riederer, Phys. Med. Biol. 20 (1975) 632.
[20] G.T. Herman, Image Reconstruction from Projections: The Fundamentals of Computerized Tomography, State University of New York at Buffalo, Amherst, NY (1980).





![Ln[DO3A-N -(pyrenebutanamido)propionate] complexes ...€¦ · Magnetic Resonance Imaging (MRI), Ultra Sound (US), and X-ray Computerized Axial Tomography (CAT), are imaging modalities](https://img.pdfslide.net/doc/110x75/608645510e0cde1f8e352066/lndo3a-n-pyrenebutanamidopropionate-complexes-magnetic-resonance-imaging.jpg)








![How Science Affects People’s Lives Health Medical Imaging X-Rays C(A)T [Computerized (Axial) Tomography] Scanning PET [Positron Emission Tomography]](https://img.pdfslide.net/doc/110x75/56649ec95503460f94bd6a9a/how-science-affects-peoples-lives-health-medical-imaging-x-rays.jpg)








![[Gabor T. Herman] Fundamentals of Computerized Tomography](https://img.pdfslide.net/doc/110x75/56d6be8a1a28ab3016929351/gabor-t-herman-fundamentals-of-computerized-tomography.jpg)