Embed Size (px)
Citation preview

8/20/2019 Design of a Hybrid Controller using Differential Evolution and MIT Rule for Magnetic Levitation System
http://slidepdf.com/reader/full/design-of-a-hybrid-controller-using-differential-evolution-and-mit-rule-for 1/7
www.ijsret.org
International Journal of Scientific Research Engineering & Technology (IJSRET), ISSN 2278 – 0882,
Volume 3 Issue 1, April 2014
Design of a Hybrid Controller using Differential Evolution and MIT Rule for
Magnetic Levitation System
Priyank Jain*, M. J. Nigam**
*Department of Electronics and Communication Engineering, Indian Institute of Technology, Roorkee, India
**Department of Electronics and Communication Engineering, Indian Institute of Technology, Roorkee, India
ABSTRACTIn various industrial systems, parameters variation is one
of the major problems faced by control engineers now
days. To overcome the problem of parameter variations,this paper proposes the hybridization of MIT rule based
online tuning of classical PID controllers with
Differential Evolution algorithm. The hybridization of
two techniques results in the offline as well as online
tuning of PID controllers at the same time. The
developed hybrid controller is then applied on magneticlevitation system using MATLAB and Simulink. The
paper also describes the basic steps involved in
Differential Evolution (DE) algorithm and a comparison
between designed hybrid controller and the simple DEalgorithm based controller has been carried out. The
results depict that the performance of the hybrid
controller is better than the offline tuned PID controller
in terms of transient parameters such as peak overshoot
and settling time.
Keywords – Differential evolution, hybridization, MIT
rule, PID controller, soft computing.
I. INTRODUCTION
Inherent disturbances and inaccuracies lead to
parameter variations in any physical system which may
result in degradation in the performance and sometimes
damage the system. To solve the problem of parameter
variation, one needs to design the control system with
more powerful and advanced techniques so as to
maintain the satisfactory performance of the overall
system. 3Adaptive Control is one of the widely used
advanced control strategies, in which one needs todesign an adjustment mechanism to alter the adjustable
parameters of controller [1]. Gradient theory based MIT
rule is one of them, which uses the concept of altering
the adjustable parameters of conventional PID controller
in the direction so that the error between plant output
and reference input can be minimized [1-3]. This type of
control is also called online tuned PID control. Online
tuning results in non-linear behavior of the overall
control system which results in good performance where
nonlinearities and disturbances are inherent part of the
system [4].
Another approach to automatically tune the parameters
of conventional controller is Differential Evolution Soft
Computing Algorithm widely known as DE algorithm
[5]. This technique uses a population based search
algorithm to estimate the controller parameters so as to
minimize the integral square error (ISE) and thisestimation is done automatically through writing a
program using MATLAB [5-8]. DE based PID tuning
comes under offline tuning methods which sets the
values of PID parameters based on a performance index
[6].Literature suggests that the performance of DE based
controller is better than MIT based controller. This pape
proposes the hybridization of above two techniques and
the performance of the hybrid controller has been
evaluated on magnetic levitation system. Section II-IV
explains strategies, simulations and results withnecessary graphs.
II. MIT RULE
There are various approaches used to design the
adjustment mechanism for an adaptive controller and
gradient theory based MIT rule is one of them. MIT rule
uses the alteration of controller parameters in the
negative direction of gradient of a cost function [4]. This
cost function is defined in terms of the error between the
actual behavior and ideal behavior of the plant.
Defining the cost variable,
J(k) = e2 / 2 (1)
In (1), e is the error between plant output and reference
model output, and k is the adjustable parameter of the
controller.
Applying gradient theory [4],dk
dt ∝ −
∂J
∂k (2)
8/20/2019 Design of a Hybrid Controller using Differential Evolution and MIT Rule for Magnetic Levitation System
http://slidepdf.com/reader/full/design-of-a-hybrid-controller-using-differential-evolution-and-mit-rule-for 2/7
www.ijsret.org
International Journal of Scientific Research Engineering & Technology (IJSRET), ISSN 2278 – 0882,
Volume 3 Issue 1, April 2014
Using the gradient theory, one will get the following
equation which depicts the relationship between the
change in parameter k with error e(t) [3].
dk/dt = −γ′ e y (3)
Hence the adjustment law developed by the equation
given above using Laplace transform will be,
k (s) = −γ′
s
ℒ {e(t ).y (t)} (4)
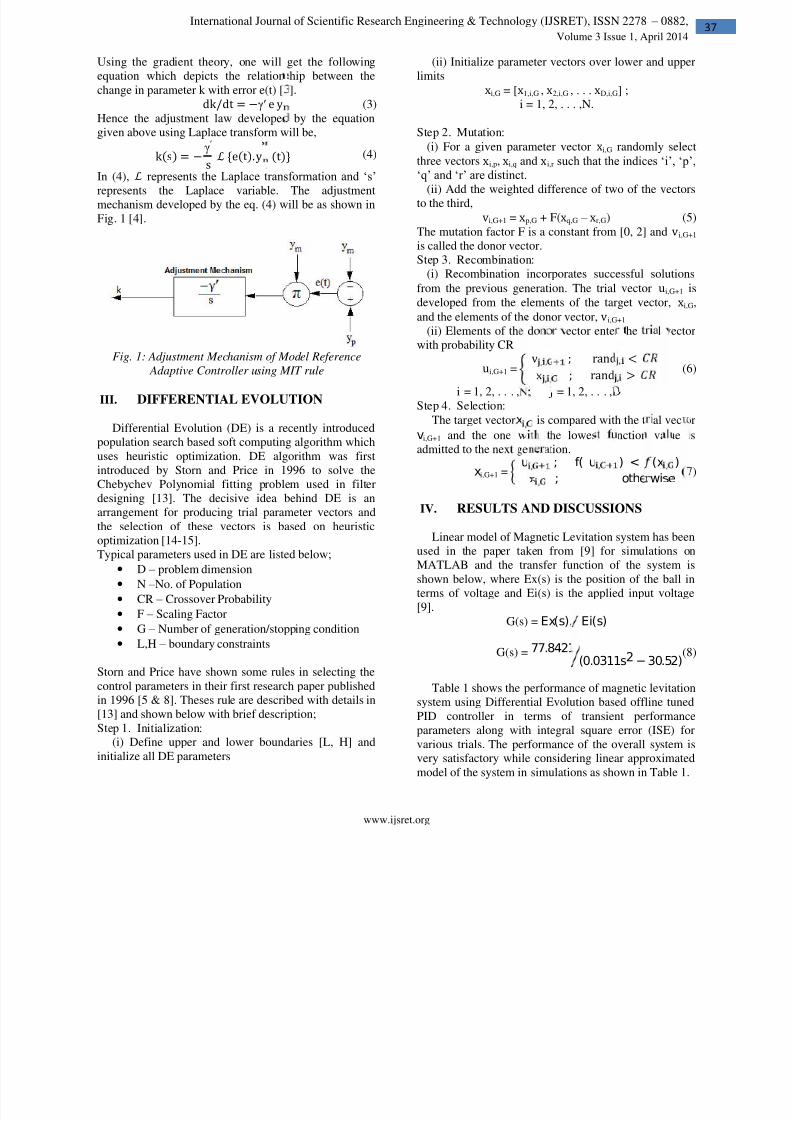
In (4), ℒ represents the Laplace transformation and ‘s’represents the Laplace variable. The adjustment
mechanism developed by the eq. (4) will be as shown in
Fig. 1 [4].
Fig. 1: Adjustment Mechanism of Model Reference
Adaptive Controller using MIT rule
III. DIFFERENTIAL EVOLUTION
Differential Evolution (DE) is a recently introduced
population search based soft computing algorithm which
uses heuristic optimization. DE algorithm was first
introduced by Storn and Price in 1996 to solve the
Chebychev Polynomial fitting problem used in filter
designing [13]. The decisive idea behind DE is an
arrangement for producing trial parameter vectors andthe selection of these vectors is based on heuristic
optimization [14-15].
Typical parameters used in DE are listed below;
• D – problem dimension
• N – No. of Population
• CR – Crossover Probability
• F – Scaling Factor
• G – Number of generation/stopping condition
• L,H – boundary constraints
Storn and Price have shown some rules in selecting thecontrol parameters in their first research paper published
in 1996 [5 & 8]. Theses rule are described with details in
[13] and shown below with brief description;
Step 1. Initialization:(i) Define upper and lower boundaries [L, H] and
initialize all DE parameters
(ii) Initialize parameter vectors over lower and upper
limits
xi,G = [x1,i,G , x2,i,G , . . . xD,i,G] ;i = 1, 2, . . . ,N.
Step 2. Mutation:
(i) For a given parameter vector xi,G randomly selec
three vectors xi,p, xi,q and xi,r such that the indices ‘i’, ‘p’‘q’ and ‘r’ are distinct.
(ii) Add the weighted difference of two of the vectors
to the third,
vi,G+1 = xp,G + F(xq,G – xr,G) (5)
The mutation factor F is a constant from [0, 2] and vi,G+
is called the donor vector.
Step 3. Recombination:
(i) Recombination incorporates successful solutions
from the previous generation. The trial vector ui,G+1 is
developed from the elements of the target vector, xi,G
and the elements of the donor vector, vi,G+1
(ii) Elements of the donor vector enter the trial vector
with probability CR
ui,G+1 =v , , ; rand , <
x , , ; rand , >(6)
i = 1, 2, . . . ,N; j = 1, 2, . . . ,D
Step 4. Selection:
The target vectorx , is compared with the trial vector
vi,G+1 and the one with the lowest function value is
admitted to the next generation.
xi,G+1 =u , ; f( u , ) < (x , )
x , ; otherwise(7)
IV. RESULTS AND DISCUSSIONS
Linear model of Magnetic Levitation system has been
used in the paper taken from [9] for simulations on
MATLAB and the transfer function of the system is
shown below, where Ex(s) is the position of the ball in
terms of voltage and Ei(s) is the applied input voltage
[9].
G(s) = Ex(s) ⁄ Ei(s)
G(s) = 77.8421(0.0311s2 − 30.52)
(8)
Table 1 shows the performance of magnetic levitation
system using Differential Evolution based offline tuned
PID controller in terms of transient performance
parameters along with integral square error (ISE) for
various trials. The performance of the overall system isvery satisfactory while considering linear approximated
model of the system in simulations as shown in Table 1.

8/20/2019 Design of a Hybrid Controller using Differential Evolution and MIT Rule for Magnetic Levitation System
http://slidepdf.com/reader/full/design-of-a-hybrid-controller-using-differential-evolution-and-mit-rule-for 3/7
www.ijsret.org
International Journal of Scientific Research Engineering & Technology (IJSRET), ISSN 2278 – 0882,
Volume 3 Issue 1, April 2014
From table 1, one can observe that in every trial there
is an overshoot of around 25-35% present in the
response. Although the settling time is much lesser for
every trial but such a large overshoot in the system is
undesirable and may cause the actuator breakdown.
Integral square error (ISE) is well under the desirable
range and the overall performance is satisfactory.
Fig. 3 shows the Simulink model of the proposed
hybrid controller, in which a PID controller is generating
the control input for the system. The integral gain of PID
controller is an adjustable gain which is being adjusted
by MIT rule based adaptive mechanism as shown in Fig.
4. The performance of the designed controller for
various trials, in terms of transient parameters and ISE,
is shown in table 2 and the corresponding responses areshown in Fig. 5. These trials have been performed to
calculate the values of PID parameters in offline mode
using DE algorithm and fine tuning in the value of
parameter KI has been carried out by MIT mechanism
with adaptation gain of 23.5 in online mode.
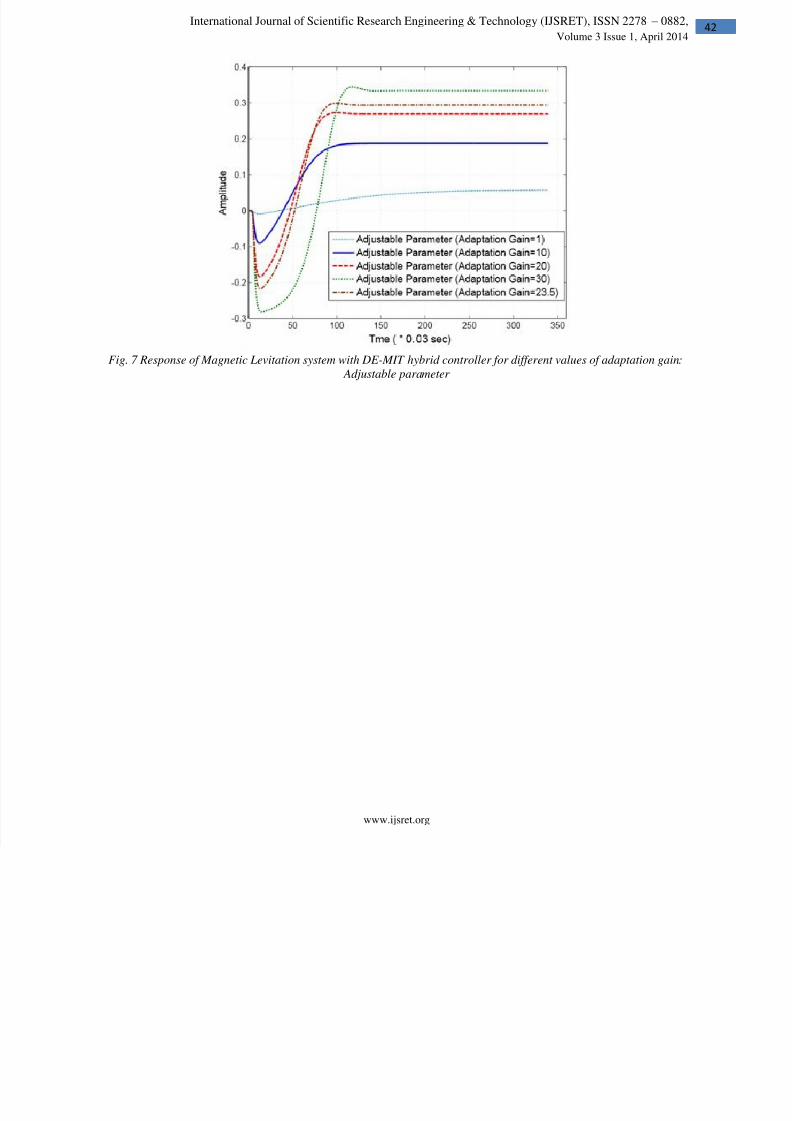
For a particular trial, different responses andcorresponding adjustable parameter for various values of
adaptation gain have been obtained and are shown in the
Fig. 6 and Fig. 7. From Fig. 6, one can observe that for
smaller values of adaptation gain, response of the systemis sluggish with large settling time. As one increases the
value of adaptation gain, the response of the system
becomes better. But after a certain limit of adaptation
gain the response of the system starts deteriorating.
Hence, selection of a range for adaptation gain is verycritical factor.
For a particular value of adaptation gain, responses
obtained for various trials are shown in Fig. 5 and theperformance of the system has been tabulated as shown
in table 2. On comparing the performances of the systemwith DE controller and DE+MIT hybrid controller, one
can observe that the performance of the hybrid controller
is better in terms of peak overshoot and settling time.
The overshoot and settling time has been reduced to
15% and 0.30 sec respectively. Results given in the
paper verify that the performance of the system has been
improved to a large extent with the proposed
hybridization of DE algorithm and MIT rule.
V. CONCLUSION
A brief overview on MIT rule and Differential
Evolution soft computing algorithm has been carried out
in this paper along with the hybridization of two
techniques.DE algorithm is very simple and effective
population based generation algorithm which takes very
less computation time than other soft computing
algorithms.The performance of DE based controller with
appropriately chosen range for various parameters is
satisfactory as shown by the results. Selection of this
range is very critical in DE algorithm and is carried out
carefully. The limitation of DE based controller is that i
does not have the ability to alter the controller
parameters during the run time. To overcome this
limitation, hybridization of DE algorithm with MIT rule
has been proposed in the paper.
Performance of the proposed hybrid controller is
evaluated on MATLAB and the designed controller has
been applied on magnetic levitation system. The
performance of hybrid controller very much depends
upon the value of adaptation gain and selection of this
gain is very critical in designing the controllerEffectiveness of the hybrid controller also depends upon
the efficient programming for DE algorithm carried ou
by an expert. Results carried out and shown in the paper
clearly shows that the performance of hybrid controller
is much better than the DE based controller. Results also
depict the reduction in peak overshoot from 30% to 15%and in settling time from 0.4 sec to 0.3 sec, which proves
better performance of proposed hybrid technique.
REFERENCES[1] K. J. Astrom and B. Wittenmark, Adaptive contro
(2nd edition), Dover Publications Inc., New York
1995, ch. 5, pp. 185 – 234.
[2] P. Swarnkar, S. K. Jain and R. K. Nema, “Effect ofadaptation gain on system performance for model
reference adaptive control scheme using MIT rule”presented at International Conference of World
Academy of Science, Engineering and TechnologyParis, pp. 70-75, 2010.
[3] P. Swarnkar, S. Jain, R. K. Nema,“Application ofModel Reference Adaptive Control Scheme To
Second Order System Using MIT Rule”, presentedat International Conference on Electrical Power
and Energy Systems (ICEPES-2010), MANIT
Bhopal, India, 2010.
[4] Priyank Jain and M. J. Nigam, “Real Time Contro
of Ball and Beam System with Model Reference
Adaptive Control Strategy using MIT Rule”presented at 2013 IEEE International Conference
on Computational Intelligence and Computing Research (ICCIC), Madurai, pp. 305-308, 2013.
[5] R. Storn, K. Price, “Differential evolution-a simple
and efficient adaptive scheme for globa
optimization over continuous spaces," Journal of
Global Optimization, Vol.11, pp. 341-359, 1997.
[6] Rainer Storn, “Differential Evolution forContinuous Function Optimization

8/20/2019 Design of a Hybrid Controller using Differential Evolution and MIT Rule for Magnetic Levitation System
http://slidepdf.com/reader/full/design-of-a-hybrid-controller-using-differential-evolution-and-mit-rule-for 4/7
www.ijsret.org
International Journal of Scientific Research Engineering & Technology (IJSRET), ISSN 2278 – 0882,
Volume 3 Issue 1, April 2014
"http://www.icsi.berkeley.edu/storn/code.html,
2005.
[7] K. Price, “An introduction to differentialevolution," New Ideas in Optimization, eds. D.
Corne, M. Dorigo, and F. Glover, McGraw-Hill,
London (UK), pp. 79-108, 1999.
[8] R. Storn, “On the Usage of Differential Evolution
for Function Optimization”. in Proceedings of the
Fuzzy Information Processing Society, Berkeley,
CA, USA, 1996.
[9] AbhishekRawat and M. J. Nigam, “Comparisonbetween adaptive linear controller and radial basis
function neural neurocontroller with real time
implementation on magnetic levitation system”,
presented at 2013 IEEE International Conference
on Computational Intelligence and Computing
Research (ICCIC), Madurai , pp. 515-518 , 2013.
[10] Adrian-VasileDuka, StelianEmilianOltean, and
MirceaDulău, “Model Reference Adaptive vs.
Learning Control for the Inverted Pendulum”,
presented at the International Conference onControl Engineering and Applied Informatics
(CEAI), vol. 9, pp. 67-75, 2007.
[11] M. S. Ehsani, “Adaptive Control of Servo Motor by
MRAC Method”, presented at IEEE International
Conference on Vehicle, Power and Propulsion
Arlington, TX, pp. 78-83, 2007.
[12] K. S. Narendra and A. M. Annaswamy, Stable
Adaptive Systems, Prentice-Hall, Englewood Cliffs
New Jersey, 1989.
[13] Mohd S. Saad, HishamuddinJamaluddin, Intan Z
M. Darus “PID Controller Tuning UsingEvolutionary Algorithms, WSEAS Transactions on
System and Control, Vol. 7, 4, pp. 139-149, 2012.
[14] K. J. Astrom and T. Hagglund, “Automatic Tuning
of PID Controllers”, Instrument Society of America
1988.
[15] J. G. Ziegler and N.B. Nichols, “Optimum Settingsfor Automatic Controllers”, Trans. ASME . Vol. 64
8: pp. 759 – 768, 1942.[16] B. C. kuo and F. Golnaraghi, Automatic Contro
Systems (9thedition), John Wiley & Sons, Inc.
2010, ch. 4, pp. 147-252.
[17] G. Saravanakumar, R. S. D. Wahidhabanu, and V
I. George, “Robustness and Performance of
Modified Smith Predictors for Processes withLonger Dead-Times”, International Journal on
Automatic Control and System Engineering
Fig. 2 Simulink diagram of magnetic levitation system with DE based control
TABLE 1: Various values of PID parameters, transient parameters and respective value of ISE on different trials of
DE based controller for Magnetic Levitation system
TrialPID Parameters Overshoot
(%)
Settling
Time
(sec)
Integral
Square Error
(ISE)KP KI KD
I 2.9900 0.0443 15.7818 25.5 0.478 0.0498
II 2.8700 0.0685 18.0636 29 0.32 0.0227

8/20/2019 Design of a Hybrid Controller using Differential Evolution and MIT Rule for Magnetic Levitation System
http://slidepdf.com/reader/full/design-of-a-hybrid-controller-using-differential-evolution-and-mit-rule-for 5/7
International Journal of
III 1.9500 0.0395 1
IV 2.7650 0.0673 1
V 2.1150 0.0422 1
Fig. 3 Simulink diagram of magn
Fig. 4 Si
TABLE 2: Various values of PID param
hybrid
TrialPID Parameters
KP KI
I 2.9732 0.0899 1
II 2.8635 0.2234 1
III 2.9989 0.4981 1
IV 2.9006 0.3649 1
www.ijsret.org
cientific Research Engineering & Technology (IJS
V
.7300 32 0.37 0.031
.8495 30 0.31 0.028
.0800 33 0.35 0.033
etic levitation system with DE and MIT rule based
ulink diagram of adjustable PID controller
ters, transient parameters and respective value of I
controller for Magnetic Levitation system
Overshoot
(%)
Settling
Time(sec)
Integr
Square E(ISEKD
.3613 16.6 0.23 0.008
.6812 15.49 0.30 0.009
.2816 14.74 0.34 0.008
.2532 15.33 0.26 0.008
ET), ISSN 2278 – 0882,
lume 3 Issue 1, April 2014
2
ybrid controller
SE on different trials of
l
rror

8/20/2019 Design of a Hybrid Controller using Differential Evolution and MIT Rule for Magnetic Levitation System
http://slidepdf.com/reader/full/design-of-a-hybrid-controller-using-differential-evolution-and-mit-rule-for 6/7
www.ijsret.org
International Journal of Scientific Research Engineering & Technology (IJSRET), ISSN 2278 – 0882,
Volume 3 Issue 1, April 2014
Fig. 5 Response of Magnetic Levitation system with DE-MIT hybrid controller for different trials with adjustable
parameter k=23.5
Fig. 6 Response of Magnetic Levitation system with DE-MIT hybrid controller for different values of adaptation gain:
Position of the ball
8/20/2019 Design of a Hybrid Controller using Differential Evolution and MIT Rule for Magnetic Levitation System
http://slidepdf.com/reader/full/design-of-a-hybrid-controller-using-differential-evolution-and-mit-rule-for 7/7
www.ijsret.org
International Journal of Scientific Research Engineering & Technology (IJSRET), ISSN 2278 – 0882,
Volume 3 Issue 1, April 2014
Fig. 7 Response of Magnetic Levitation system with DE-MIT hybrid controller for different values of adaptation gain:
Adjustable parameter





























