Embed Size (px)
Citation preview

DESIGN OF A RECONFIGURABLE END-EFFECTOR
AND A CLIMATIC SENSORS ADAPTER FOR THE
BIO-PLEX BIOMASS PRODUCTION CHAMBER
by
Tilmann Negele
A thesis submitted in partial fulfillment of
the requirements for the degree of
Master of Science
(Mechanical Engineering)
at the
UNIVERSITY OF WISCONSIN - MADISON
2001

i
Abstract
Advanced life support systems based on the integration of regenerative biological and
physicochemical processes to produce food, potable water, and a breathable atmosphere
from metabolic wastes need to be developed to sustain current long-term space missions
and future permanent human presence in space. NASA Johnson Space Center (JSC) is
developing a Bioregenerative Planetary Life Support Systems Test Complex (BIO-Plex)
to provide comprehensive study of human-rated regenerative life support systems for
extended durations. One of the modules in the BIO-Plex is the Biomass Production
Chamber (BPC), an enclosed and environmentally controlled cylinder with 4.6m (15ft)
in diameter and 11.6m (35ft) in length, which is specifically used for food crop produc-
tion from propagation and seeding to harvest of raw agricultural crops. To facilitate
crop observation, environment monitoring, crop material transportation, and system
maintenance, an automated robotic system is in development, which is composed of a
two degree-of-freedom (DOF) gantry, a five DOF robot manipulator, and a single DOF
reconfigurable robotic end-effector.
One goal of this project was the development of the end-effector for the robotic sys-
tem, which is used for fully automated environmental sampling, video monitoring, and
plant material sampling. A unique plug was designed to allow the end-effector to inter-
face with different types of sensor/probe adapters and the plant sampling mechanism,

iiwhich provides rapid and automatic configuration for a variety of tasks ranging from
measurement of environmental conditions to tissue sampling and storage without human
intervention. The other goal was the design of an exemplary adapter for acquisition
of temperature, relative humidity, air velocity and photosynthetic photon flux data.
Sensor data and a video composite signal are sent to a remote-located computer via
wireless transmission to minimize wiring. Control of the end-effector, including continu-
ous acquisition of data, will be integrated into the computer that monitors the operating
status of the BPC, and controls the chamber conditions to the desired set points.

iii
Acknowledgments
I would like to thank Prof. Uwe Heisel at the University of Stuttgart who enabled me
to get this unique experience of studying abroad, and the German Academic Exchange
Service (DAAD) for the funding of this exchange program.
I would like to express sincere gratitude to Prof. Neil A. Duffie and Dr. Weijia Zhou
who gave me the opportunity to work on this project and provided the financial support.
As well, I want to thank them for their guidance and advice during my research. I am
grateful to Prof. John J. Jr. Uicker and Prof. Nicola J. Ferrier who committed their
time by serving on my committee.
Thanks to the people who contributed to this project by providing helpful support
and advice: The staff of the Wisconsin Center for Space Automation and Robotics,
especially Matt DeMars for helping me getting started with the programming, and the
Department of Mechanical Engineering staff, especially Erick Oberstar for designing
the electronics.
Last but not least, thanks and greetings to my friends for supporting my work, and for
the unforgettable nights on the Terrace.

iv
Contents
Abstract i
Acknowledgments iii
1 Introduction 1
1.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Research Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3 Summary and Report Contents . . . . . . . . . . . . . . . . . . . . . . . 8
2 Design of the Mechanical Parts 11
2.1 Design Strategy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Defining the Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.1 Functional Requirements . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.2 Geometry and Size . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.3 Kinematics, Kinetics, Forces . . . . . . . . . . . . . . . . . . . . . 16

v2.2.4 Energy and Data Flow . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.5 Materials, Machining, Assembly . . . . . . . . . . . . . . . . . . . 17
2.2.6 Reliability, Safety, Ergonomics, Usage . . . . . . . . . . . . . . . . 17
2.2.7 Summary of Requirements . . . . . . . . . . . . . . . . . . . . . . 18
2.3 Conceptual Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.4 Selection of Sensors and Tools . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4.1 Air Velocity Sensors . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.4.2 Temperature and Relative Humidity Sensors . . . . . . . . . . . . 24
2.4.3 Photosynthetic Photon Flux . . . . . . . . . . . . . . . . . . . . . 26
2.4.4 Camera System and Image Acquisition . . . . . . . . . . . . . . . 27
2.4.5 Physiological Measurements . . . . . . . . . . . . . . . . . . . . . 29
2.4.6 Grabber . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.5 Range Enlargement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.5.1 Evaluation of Options . . . . . . . . . . . . . . . . . . . . . . . . 32
2.5.2 Evaluation of Linear Motion Options . . . . . . . . . . . . . . . . 33
2.5.3 Evaluation of Motor Principles . . . . . . . . . . . . . . . . . . . 35
2.5.4 Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.6 Principles for the Remaining Partial Functions . . . . . . . . . . . . . . . 37

vi2.6.1 Power Supply . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.6.2 Data Transmission . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.6.3 Mechanical and Electrical Connector . . . . . . . . . . . . . . . . 39
2.6.4 Rack . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.6.5 Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.6.6 Adapters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.7 Evaluation of Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.7.1 Power Supply . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.7.2 Data Transmission . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2.8 Definition of the Principal Solution . . . . . . . . . . . . . . . . . . . . . 45
2.8.1 Mechanical and Electrical Connection . . . . . . . . . . . . . . . . 45
2.8.2 Data Transmission . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.8.3 Allocation of Sensors to Adapters . . . . . . . . . . . . . . . . . . 48
2.8.4 Conceptual Design Summary . . . . . . . . . . . . . . . . . . . . 49
2.9 Embodiment Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
2.9.1 Climatic Sensors Adapter . . . . . . . . . . . . . . . . . . . . . . 50
2.9.2 Plug . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2.9.3 Rack . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55

vii2.10 Detail Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.10.1 Adapter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.10.2 Plug . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
2.11 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3 End-Effector and Adapter Electronics 65
3.1 Linear Actuator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
3.1.1 Power Supply and Communication Interface . . . . . . . . . . . . 67
3.1.2 Home Position Switch . . . . . . . . . . . . . . . . . . . . . . . . 67
3.1.3 Programming the Smart Motor . . . . . . . . . . . . . . . . . . . 68
3.1.4 Calculations for the Generation of Motion . . . . . . . . . . . . . 69
3.2 RF Transceiver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
3.3 Voltage Supply Board . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.4 Data Acquisition and Signal Conditioning Board . . . . . . . . . . . . . . 75
3.5 Pogo-Pin Connector Plate . . . . . . . . . . . . . . . . . . . . . . . . . . 80
3.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4 Software 82
4.1 Selection of the Programming Language . . . . . . . . . . . . . . . . . . 83
4.2 Design of the Graphical User Interface . . . . . . . . . . . . . . . . . . . 85

viii4.3 Program Logic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
4.3.1 Logic for Data Acquisition . . . . . . . . . . . . . . . . . . . . . . 86
4.3.2 Data Representation . . . . . . . . . . . . . . . . . . . . . . . . . 89
4.3.3 Logic for Storage of Data . . . . . . . . . . . . . . . . . . . . . . . 92
4.3.4 Logic for Tool Exchange . . . . . . . . . . . . . . . . . . . . . . . 92
4.3.5 Logic for Motion Controls . . . . . . . . . . . . . . . . . . . . . . 94
4.4 C Program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
4.4.1 Structure and Organization . . . . . . . . . . . . . . . . . . . . . 96
4.4.2 Main Body . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
4.4.3 Implementation of Serial Communication . . . . . . . . . . . . . . 97
4.4.4 Timed Events . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
4.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
5 Assembly and Evaluation 100
5.1 End-Effector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
5.2 Climatic Sensors Adapter . . . . . . . . . . . . . . . . . . . . . . . . . . 102
5.3 Experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
5.4 Evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
5.4.1 End-Effector and Plugging Mechanism . . . . . . . . . . . . . . . 108

ix5.4.2 Climatic Sensors Adapter and Data Acquisition Process . . . . . . 111
5.4.3 Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
5.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
6 Conclusions and Recommendations 115
6.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
6.2 Recommendations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
6.3 Outlook . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
6.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
Appendix A Basics of Robotics 123
Appendix B Basics of Data Acquisition 126
Appendix C Basics of Serial Communication 129
List of Figures 131
List of Tables 136
Bibliography 139

1
Chapter 1
Introduction
1.1 Background
For long duration space missions, permanent bases on the lunar surface or travel to
Mars, systems to produce food, purify water supply, regenerate oxygen and remove
undesirable components of the air are necessary. Such a system would be a tightly
controlled closed loop system in which the growth of crop plants would contribute to
the life support functions [1]. Due to the nature and given restrictions of space flights,
minimizing volume, mass, energy, and labor are key efforts in system design.
Part of this research program for life support systems is the Bioregenerative Plane-
tary Life Support Systems Test Complex (BIO-Plex), a high-fidelity NASA facility for
long duration tests of bio-regenerative planetary life support systems. It is a large test
bed with human test crews for interdisciplinary research and experimentation [2]. The
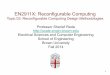
preliminary layout of the facility is shown in Figure 1.1. Illustrated are the five ma-
jor chambers for habitation, life support systems, laboratory, biomass production and

2the interconnecting service tunnel. Main research objectives of the BIO-Plex project
concern:
• Reliance on expenditures like energy or fertilizer
• Long-term effects on stability and steady-state behavior
• Biological and physio-chemical properties
• Accumulation of contaminants
• Effects of realistic metabolic and hygiene inputs
• Training and operation issues
• Energy management
• Reliability and maintainability
Figure 1.1: Layout of BIO-Plex, adapted from [1]

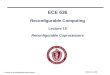
3The Biomass Production System (BPS) is one of seven life support systems planned
for BIO-Plex. The life support systems and their relationships are illustrated in Figure
1.2. The following criteria were applied in design of the BPS according to [2]:
• Maximized food production, growing area and productivity
• Modularity in design to allow replacement of components
• Energy efficient and low mass components where possible
• Automate and mechanize crop handling
• Reduce dependency on crew time
• Independently controlled shoot and root conditions for all crops
• Common atmospheric control
Water
System
Biomass
Production
System
Processing
Food Solids
Processing
System
Control
Thermal
System
Integrated
System
Control
System
Recovery
Water
System
Air
Revitalization
2
2
CO
O
Nutrient
Biomass
Heat
Data
Produce
Figure 1.2: Mass, Energy and Data Flow for the BIO-Plex Project, adapted from [2]

4The main goal of the BPS is supporting the entire cycle of food crop production from
propagation and seeding to harvest and storage of raw agricultural products [2]. It
includes two Biomass Production Chambers (BPC), which contain the systems to grow
plants under optimized conditions and other equipment associated with food crop pro-
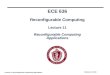
duction. The profile and main dimensions of one of the BPCs is shown in Figure 1.3.
P
O460 /
GA
SS
AACS
SS
T
Figure 1.3: Profile of the Biomass Production Chamber with Dimensions in cm, adaptedfrom [2]
• SS: Side Shelf

5• CS: Central Shelf
• GA: Growth Area
• T: Biomass Transporter
• A: Aisle
• P: Platform
The chambers measure 4.6m in diameter and 11.3m in length. The design contains
three shelves and two aisles, providing an overall growth area of 82.4m2. Each side shelf
has three, the central shelf has four growth areas. The two-axis biomass transporter is
an elevator-like gantry robot operating in each aisle, it moves the platform bearing the
robot along and up and down the shelves. The transporter is designed to support a
crew member for direct observation and a robotic arm originally equipped with a simple
gripper, which is shown in Figure 1.4. The gripper is capable of holding tools that a
crew member has to provide. The overall range of the arm at full extension is 76cm.
Figure 1.4: Robotic Arm, adapted from [3]
The degrees of freedom (DOF) of the resulting system, including platform, robot and
end-effector, are illustrated in Figure 1.5. DOF1 and DOF2 are due to the gantry

6robot. The robotic arm, as shown in Figure 1.4, is a five degree of freedom manipulator
in R-P-P-P-R configuration [4]. ”R” stands for a full rotary degree of freedom, while
”P” indicates rotary joints with limited motion range of 210 degrees [5]. This means,
that base (DOF3) and wrist (DOF7) have full rotary freedom, while motion in the
intermittent joints DOF4 - DOF6 is limited to 210 degrees. DOF8 is added by the
linear axis of the end-effector.
2
1
3
4
78
5 6
Figure 1.5: Degrees of Freedom
1.2 Research Objectives
Reduction of crew time and automation of processes is a key interest for the Biomass
Production System. A large amount of data is needed for the control of growing condi-

7tions and evaluation of tests. In this project a new end-effector and an adapter module
for climatic measurements were designed. Data acquisition within the Biomass Pro-
duction Chamber was made possible without human intervention due to the automatic
exchange of adapter modules. The modular design allows to expand the system with
additional adapters for acquisition of physiological data and collection of plant samples.
The objective of this project was:
• Mechanical design of an end-effector for the robotic arm and the climatic sensors
adapter. The end-effector consists of the linear actuator for range enlargement and
the fork-like plug device. A ball-screw rotary to linear motion transformer driven
by a servo motor and a belt provides the linear motion for range enlargement.
The plug uses two cylindrical forks that fit into reamed holes in the adapter. The
mechanical joint is realized by ball plungers that snap into a notch in the cylinders
as male part of the joint. The adapter consists of electronic boards, sensors and
the interface to the plug.
• Design and implementation of electronics for data acquisition, power supply and
control. Sensors and tools for sampling of temperature, relative humidity, light
intensity, air velocity data and video signals were selected. Additional electronics
were necessary for signal conditioning, analog to digital signal conversion and
processing of data in respect of requirements for serial communication over a
radio frequency link. Power supply was realized by pre-stressed pogo-pins.
• Software development for control of end-effector motion, data acquisition pro-
cess, storage and display of data. The Windows-based program developed in this
project provides a user-friendly graphical interface.

81.3 Summary and Report Contents
Figure 1.6 shows a picture of the designed system consisting of the end-effector and
the climatic sensors adapter Mechanical, electrical and software design were done in
parallel, nevertheless they are discussed separate in the next chapters for better clarity.
Figure 1.6: Reconfigurable End-Effector with mounted Climatic Sensors Adapter
Chapter 2 describes the physical design of the end-effector consisting of a linear actuator
and the attached plug device, and the adapter for climatic data acquisition. As well,
the selection of the linear actuator, the sensors and the video camera is discussed.
Chapter 3 describes design and implementation of electronics and interfaces that were
necessary to provide power supply and wireless transmission of data in an appropriate
manner.
Chapter 4 describes the development of software that allows control of the linear axis,
sensor calibration, control of data acquisition and storage of data in files for display and
later examination with conventional spreadsheet programs.
Chapter 5 describes the assembly and results of tests with the designed system. The

9feasibility of the general idea of an adaptive and reconfigurable design was proven.
Chapter 6 contains conclusions and recommendations for further development of the
design.
Table 1.1 lists definitions, Table 1.2 contains abbreviations as used in the following
chapters.
Platform platform of the gantry robot transporter in BPC
Robot 5-axis robotic arm mounted to the platform
End-Effector Module that is attached to the robot, consisting of the linear actu-
ator and the plug device
Linear Actuator Module providing range enlargement consisting of the motor and
the attached belt-driven linear axis
Plug Device that is attached to the tip of the linear axis, serving as
interface to the adapter
Adapter Module that carries the tools and additional electronics
Rack Storage facility for unused adapters
Table 1.1: Definitions

10
NASA National Aeronautics and Space Administration
JSC Johnson Space Center
WCSAR Wisconsin Center for Space Automation and Robotics
BIO-Plex Bioregenerative Planetary Life Support Systems Test Complex
BPS Biomass Production System, consisting of BPC1, BPC2 and addi-
tional equipment
BPC Biomass Production Chambers
SMI Smart Motor Interface, manufacturer software for control of the
linear actuator
DOF Degree(s) of Freedom
ADC Analog to Digital Converter
I/O Input/Output
VDC Voltage Direct Current
DAQ Data Acquisition
PPF Photosynthetic Photon Flux
MCU Micro-Controller Unit
Table 1.2: Abbreviations

11
Chapter 2
Design of the Mechanical Parts
The design of the physical parts for the end-effector and the climatic sensors adapter
is described in this chapter. In the beginning the theoretical approach to the design
process is explained, then the requirements for the system are discussed. The following
sections deal with the selection of the sensors and the camera, the design of additionally
needed components, and their combination into a system that is capable of meeting the
requirements.
2.1 Design Strategy
The design methodology implemented in this project is based on the Association of
German Engineers (Verein Deutscher Ingenieure - VDI) Guidelines 2220 to 2225 [6].
The guidelines are commonly used in development and design of technical systems and
products. They are presented and explained in [7]. The design process starts with
abstraction of the main functionality and leads to a solution for the concrete system.
Another central characteristic is the iterative nature of the process, regression to earlier

12phases is important and necessary, because requirements or perspectives may change.
An overview of the four main phases in design is given in Figure 2.1; it is fundamental
for all engineering designs.
Requirements
Detail
Design
Embodiment
Design
Conceptual
Design
Defining the
Figure 2.1: Design Process
Design begins with the first phase, the problem identification to define the requirements.
In this project, information about intended goals and the background of the BIO-Plex
project was required for the definition of the problem. The next step was dividing the
task into functional groups. Abstracting helped in identifying the core of the task, the
functions that affected the design most.
The following phase, called the conceptual design, was the creative part of the mechan-
ical design, it comprised finding solutions for the functional groups determined before.
Later those partial solutions were evaluated. The selection of a particular partial solu-
tion had to consider the performance of the entire design.

13The embodiment design is the third phase of the design process. It entails the elab-
oration of the principles agreed on in the preceding phase and results in an explicit
and fully defined structure. The laying out of the parts was supported by the checklist
presented in Figure 2.2. The features were designed sequentially in order of importance
[7].
Ability to Assemble
Aspects Concerning Usage
Aspects in Manufacturing
Security and Ergonomics
Layout, Ability to Endure Load
Effect of the Active Principle
Fulfillment of Functionality
Figure 2.2: Checklist for Layout of the Parts
Following the checklist in Figure 2.2 guaranteed functionality, effectiveness of the chosen
active principle and fulfillment of tasks in the whole context. As well, ease of fabrication
by the machine shop and assembly were ensured.

14The detail design phase finalized the design. Dimensions were assigned to all parts,
documentation of the design was generated and forwarded for execution to the machine
shop.
2.2 Defining the Requirements
This section describes the first phase of the design process presented in Figure 2.1. A
thorough understanding of the intended functionality and knowledge of any applicable
limitations is always very important for an effective design. As well, conditions pre-
sented by environment or the character of intended space travel and their significance
were determined. Costs played a less important role in this design, because the system
was designed as a prototype for use in a special application. This was a major difference
with respect to the design of a commercial product where costs are usually the most
important and determining factors for the success of a design.
2.2.1 Functional Requirements
The purpose of the system to be designed was automated data acquisition within the
plant growth chamber. The measurements to be accomplished at this stage included:
• Temperature
• Relative humidity
• Air velocity
• Light intensity

15A further requirement was the handling of the digital still camera. The images are
used for orientation of several tools as well as monitoring of the chamber. Later a
grabber or cutter will be added to get samples of plants or soil, and the data acquisition
will be expanded by physical measurement systems, which include a leaf chlorophyll
meter, steady-state porometer and a plant-stress meter. Therefore, the whole design
had to provide the ability for further expansion and adaptivity. The required functions
included:
• Handling of sensors and tools
• Automatic exchange of adapters
• Storage of unused adapters and tools
• Display, storage and processing of data
• Automated execution of all required movements
2.2.2 Geometry and Size
The existing 5-axis robot, shown in Figure 1.4, has a total length of 76cm. From the
dimensions of the chamber, shown in Figure 1.3, it was concluded that the required
maximum range was approximately 120cm. Access to all locations within the plant
growth chamber had to be provided with best achievable flexibility in orientation of the
tools. Therefore, the range of movement had to be increased by about at least 44cm.
Space within the plant growth chamber is limited, so all designed parts had to be as
small and compact as possible.

162.2.3 Kinematics, Kinetics, Forces
The end-effector will be used on earth rather than in space, so gravitation forces will
be present. This applies for the masses of tools, sensors and all mechanical parts of
the adapters. The payload of the existing robot is 15N (3lbs), but it is capable of
handling more [3]. A design as lightweight as possible was desired, because the payload
is very low for the intended task. High forces during the exchange of adapters had to
be prevented. Accelerations and speeds will be relatively low during operation when
compared to most industrial assembly or manufacturing processes.
Reaction forces during the data acquisition don’t exist intentionally; an exception is a
possible collision with obstacles within the chamber. The design therefore had to be
such that collisions would not damage fragile components like sensor probes. Paths for
tool exchange and avoiding obstacles during trajectory are a matter of motion pattern
planning, which was not subject of this project.
2.2.4 Energy and Data Flow
Transmission of data was the central objective of the project as will be discussed later in
this chapter. The transmission of data had to be reliable. Noise had to be held as low as
possible; further considerations included filters, signal conditioning and amplification.
The connection between the adapter and the plug needed to be reliable under all possible
circumstances. The system needed to be easy and safe to set up.
Power supply was necessary for the linear actuator, the sensors and the camera. The
only source available in the system is a 24 VDC battery pack mounted on the plat-
form [3]. Energy consumption of the components had to be kept in mind, and a safe
connection to the source had to be provided. Electro-magnetic waves can influence

17signal transmission and other functions, so shielding needed consideration. Control of
the robot and data acquisition will be executed by a remote laptop using a PCMCIA
interface.
2.2.5 Materials, Machining, Assembly
Materials that were easy to handle and machine but still provided sufficient strength
were to be used. As well, the parts had to be as lightweight as possible. Certain
manufacturing processes like molding or blow molding are cheap in mass production
but not applicable for the design of a prototype. The design had to be such that
the machine shop could easily manufacture the parts. Demands on accuracy of the
manufactured parts were kept low to reduce costs and effort. The design had to include
possibilities to adjust the parts during the assembly and provide adaptability. Sharp
edges are not acceptable in space travel, all parts had to be chamfered in order to
increase safety.
2.2.6 Reliability, Safety, Ergonomics, Usage
All parts required protection from environmental effects like dust, temperature and
corrosion resulting from high levels of relative humidity. Proven and highly reliable
components had to be used. Only very small or no wear at all can be accepted. All
parts needed to require as low maintenance time as possible to reduce crew time as
much as possible [2]. Additional protection features like housings, covered mounts, and
safety switches were considered.

182.2.7 Summary of Requirements
Summing up the preceding sections leads to the demand for a system fulfilling the mayor
requirements shown in Table 2.1. The table uses the following convention:
1 ”must”
2 ”do as good as possible”
Requirement Priority
Fulfillment of all tasks 1
Increase range by at least 44cm 1
Supply from 24 VDC battery pack 1
Overall mass of end-effector less than 1.5kg 2
Controllable from laptop 1
Low energy consumption 2
Reliability 2
Table 2.1: Design Requirements
2.3 Conceptual Design
The conceptual design phase consists of the steps shown in Figure 2.3. The list of
requirements yields in the generation of a functional structure. Gathering solutions for
the separated partial functions, regardless of whether they seem to be reasonable follows.
This creates a variety of alternatives to chose from. Generally applicable methods for
the generation of solutions can be intuitive, discursive and systematic in nature [7].
Sources of ideas for this project were brainstorming, literature and Internet research,

19analysis of known similar systems and analogies in functionality to other products. This
was necessary not only to find hints or fractional solutions, but also to make sure there
was no solution already available that fulfills all those tasks in a satisfying manner.
The functional modules are then evaluated separately. Promising partial solutions are
selected and combined to the final design approach.
List of Requirements
Principal Solution
Definition of the
Combinations
Selection of
Structure
Generation of a
Principles for the
Partial Functions
Partial Functions
Evaluation of the
Figure 2.3: Steps in Conceptual Design
The generation of a functional structure is the first step of the conceptual design phase.
Consideration of the design requirements, especially the functional tasks, resulted in
the functional modules shown in Figure 2.4. The method that was applied for making

20up those modules was mostly common sense, guided by the insights gathered during
the design process so far. Each module or partial function was then studied separately.
Tools and accompanying electronics are lumped into a module called adapter. Range
enlargement was a very complex module due to the number of options. Storage of
unused sensors is accomplished by the rack module. The connector module combines
considerations on providing electrical and mechanical joints between the plug of the end-
effector and the adapter. Data and power transmission are issues which are addressed
separately. The software module contains tasks concerning control, data processing and
communication.
Connector
Rack
& Tools
Sensors
Range
Enlargment
Power
Supply
Software
Data
Transmission
Adapter
Figure 2.4: Functional Modules shown without Relationships
2.4 Selection of Sensors and Tools
This section discusses the selection of sensors and the video camera sub-system. Spec-
ifications of the sensors had to be known in order to be able to evaluate and combine

21the other fractions accordingly. The following sensors and tools were needed:
• Temperature sensor
• Relative Humidity sensor
• Air Velocity sensor
• Photosynthetic Photon Flux sensor
• Video Camera
Sensor designs can be divided according to the use of active and passive principles.
Passive sensors do not require an external power source [8]. They have relatively weak
output signals that need to be amplified for further processing. Active sensors need
a stable power supply in order to output reliable data. Digital or analog (voltages or
currents) outputs are possible. Combined probes are available for some measurements
like air velocity, relative humidity and temperature. The following properties were
examined in order to select suitable sensors for this project:
• Weight inclusive peripherals
• Size (compact and small)
• Resolution, accuracy and repeatability
• Time needed for data acquisition (response time or time constant)
• Energy consumption and voltage
• Output signal
• Overall design and mounting capabilities
• Compatibility with desired controls
• Integrated radio transmitter if available to avoid wiring effort
• Price low if possible

222.4.1 Air Velocity Sensors
Probes for the measurement of air velocity in rooms and tubes are called anemometers.
They are widely used especially in HVAC applications. Therefore, most commercial
products are designed with features like tube mounts or long telescopic probes. Main
principles for measurement of air velocities are:
• Pin wheel: The streaming air lets a pin wheel rotate. The rotational velocity
is measured either opto-electronically with encoders or by a rotating spool in a
magnetic field. These sensors are cheap and easy to use but are too bulky for this
application.
• Hot wire anemometry: A hot wire either heated by a constant current or main-
tained at a constant temperature. The heat loss due to fluid convection is a
function of fluid velocity, and this principle is used to perform thermal anemome-
try. Advantages are excellent resolution and fast response. Problems include high
power demands, fragility of the wire and high costs [9].
• Thin film technology: This is another method of thermal anemometry. An elec-
trical current increases the temperature of a resistor on glass-like substrate, while
flowing air causes a reduction of this temperature. The cooling effect is directly
proportional to the mass flow and consequently to the air velocity. For tempera-
ture compensation, a second temperature sensor is usually placed in the same air
flow. Characteristics of the designs are similar to hot wire anemometry [10].
For the measurement of air velocities, bi- and omni-directional probes are available.
In this design a bi-directional probe was needed in order to be able to determine the
direction of the air flow as well as the intensity. A system with a probe mounted to
a flexible cable was finally chosen due to mounting and space considerations. Most of

23the products were far too heavy and big. Cambridge Accusense offered the best suited
air velocity probe. They specialize in probes for use in clean room environments, and
their AVS1000 series were the lightest and smallest probes available. Most importantly,
high resolution for low air velocities is accomplished. Specifications for this product are
listed in Table 2.2, and the probe is shown in Figure 2.5.
Mass 30 g
Size 73x45x17 mm
Accuracy ∼ 3%(8bit)
Range of Velocity ±2.5m/s
Time Constant 0.1 s
Supply Voltage 10-16 V
Current Consumption 50 mA
Output 0±10 V
Total Price $450
Table 2.2: Specifications of the Air Velocity Sensor, adapted from [11]
Figure 2.5: AVS1000 Air Velocity Probe, adapted from [11]

242.4.2 Temperature and Relative Humidity Sensors
A probe that combines both measurements was favored because relative humidity is tem-
perature dependent. Combined probes were smaller and more compact than separated
probes. The range of temperature to be measured within the chamber is approximately
18 to 26 degrees Celsius. Principles generally used for temperature measurements are:
• Resistance Temperature Detectors (RTD) are comprised of a lightly supported
wire coil in a quartz protective or ceramic tube or platinum foil on alumina sub-
strate. The working principle is the measurement of platinum resistance and the
linear relationship between the temperature and the resistance. RTDs output
small changes in voltage, are expensive, but are easy to use and very accurate [8].
• Thermistors are made of temperature sensitive oxides that act as semicoductors.
Changes in temperature result in a change in resistance[12]. The output is not as
linear as with RTDs, but they are much more sensitive.
• Thermocouples consist of two dissimilar metals in contact (called a junction),
which generate a thermo-electric voltage. This is called the Seebeck effect. For
temperature measurements, one junction is kept at a constant reference tem-
perature or temperature reference is provided by instrumentation, which is self-
powered, inexpensive and rugged. Another junction is placed at the measurement
site. Typical temperature resolution is approximately 1 degree Celsius, which is
not enough for this application [8], [13].
Principles generally used for humidity measurement are:
• Sorption methods are based on a thin polymer film either absorbing or exuding
water vapor as the relative humidity of the ambient air rises or drops. The dialectic
property of the polymer film depends on the amount of water contained in it; as

25the relative humidity changes, the dialectic property of the film changes and so
does the capacitance of the sensor. The capacitance of the sensor is measured and
converted into a humidity reading [14].
• Condensation methods are implemented in cold climates, where the humidity level
is low (in mountains, polar, or upper air measurements). Hygrometers based on
this principle are generally called chilled mirror hygrometers [15].
• Absorption of electro-magnetic radiation by water vapor is another method. It is
used for tracking of fast humidity fluctuations [15].
The Humitter 50Y probe from Vaisala was finally chosen. It uses an interchangeable
sensor, making recalibration unnecessary [14]. It is electro-magnetically shielded and
has a lightweight plastic housing providing shelter from spray water. It is very compact
and provides sufficient accuracy. In fact, most probes available from other manufactur-
ers make use of the Vaisala sensors. The temperature is measured by a Pt1000 element
(RTD probe with a resistance of 1000Ω at the reference point of 0 degrees Celsius).
Relative humidity is measured by a polymer film absorbing vapor. Its characteristics
are listed in Table 2.3, the probe is shown in Figure 2.6.
Figure 2.6: Humitter Temperature and Relative Humidity Probe, adapted from [14]

26
Mass 30g
Size 12x69mm
Accuracy ∼ 2%
Range of Temperature -10 to +60C
Range of Humidity 0− 100%
Time Constant < 1s
Supply Voltage 7-28V
Current Consumption 2mA
Output 0-1V each
Total Price $200
Table 2.3: Specifications of the Temperature and RH Sensor, adapted from [14]
2.4.3 Photosynthetic Photon Flux
Photosynthetic Photon Flux (PPF) sensors measure the intensity of radiation between
400 and 700 nm, which are the most important wavelengths for photosynthesis and
plant growth. A silicon photodiode is used as the detector. PPF sensors are passive
sensors that don’t need external power supply. The drawback is that output signals are
very weak and therefore require high resolution data acquisition. PPF is measured in
micromoles of photons per square meter second.
The sensor chosen was the QSO-ELEC from Apogee Instruments. Another smaller
sensor was offered, but this version was easier to mount and still compact enough. It
was calibrated for use with electric light and created for use in computer controlled data
acquisition systems. The Apogee sensor already includes an internal resistor to boost
the output signal to a higher output value. Specifications are given in Table 2.4, the
probe is shown in Figure 2.7.

27
Mass 30 g
Size 24x25mm
Accuracy ∼ 2− 3%
Time Constant 1 s
Output 0-0.8 V
Total Price $89
Table 2.4: Specifications of the PPF Sensor, adapted from [16]
Figure 2.7: PPF Probe, adapted from [16]
2.4.4 Camera System and Image Acquisition
The system had to be equipped with a camera. It will be used to send images from
within the chamber in order to monitor the chamber for general surveillance and for
guiding several tools. A large variety of cameras exists on the market. Requirements
for the desired camera sub-system were:
• Size and weight as small as possible
• Resolution higher than 300 pixels is enough
• Output signal needs to be color, either digital or analog
• Easily interfaced and transmitted to the screen
• Contrast and light sensitivity is of lower importance

28• Radio transmission of the signal to reduce effort of wiring
• Power supply with a low voltage and low consumption
Supercircuits is a company that specializes in surveillance and video security. They
offered the smallest solutions for cameras and further needed equipment, the tiny size
due to the integrated transmitter was the decisive factor. This made the implementation
of the vision system very easy. Resolution and sensibility are low, but they are sufficient
for this application. The camera uses a pinhole lens. The receiver is very compact as
well and will be set up close to the monitor or a computer with a video card. The
following components were selected, which have the specifications listed in Table 2.5.
• AVX900S5 Color Wireless ATV Video Camera including whip antenna with inte-
grated AVX900 Micro ATV video transmitter, shown in Figure 2.8.
• AVX900R2 high gain receiver, shown in Figure 2.9.
Mass 30 g
Size 26x26x17mm
Resolution 380 lines
Frequency Band 900 MHz
Transmitter Range 250 m
Supply Voltage 9 V
Current Consumption 70 mA
Light Sensitivity 4 lux
Total Price $419
Table 2.5: Features of the Camera and included Transmitter, adapted from [17]

29
Figure 2.8: Digital Video Camera inclusive Transmitter, adapted from [17]
Figure 2.9: High Gain Video Receiver, adapted from [17]
2.4.5 Physiological Measurements
Sensors for physiological measurements include:
• Plant stress meter
• Leaf chlorophyll meter
• Porometer
All of these sensors have requirements for handling, supply and outputs that are similar
to the sensors for climatic measurements discussed above. Those sensors were not

30required at this stage of the development of the end-effector. Nevertheless, the overall
design had to be carried out in a way to be able to add them later.
2.4.6 Grabber
The design of the grabber will strongly depend on what kind of samples have to be
taken (leaves, soil, liquids), and which other requirements for those actions exist. It is
unlikely that this adapter will require data flow, but power supply will be necessary in
case the grabber needs a motor driven sampling device. Orientation and positioning of
the grabber with respect to the plant or object will be done by the robot, most likely
using images from the video camera. Possible grabber functions include:
• Scissors or knives to cut off samples
• Tearing off samples
• Taking leaf samples by a hole puncher.
The design of the grabber was outside the scope of this project and is not examined
further.
2.5 Range Enlargement
This section describes the selection of the linear actuator, which was implemented
in order to achieve the required range enlargement. The requirements for the linear
actuator were:
• Desired supply voltage according to battery pack is 24VDC.
• Energy consumption should be as low as possible.

31• Max mass of axis and adapter is 1.5kg, therefore the motor should be as light as
possible.
• Force perpendicular to axis of motion due to mass of adapters won’t exceed 10N.
• Force in direction of axis just occurs during the docking process and won’t exceed
100N.
• The sensors and tools require low operating forces and positioning accuracies, so
high structural strength is not necessary.
• Required velocities and accelerations are low compared to most applications, ve-
locity of approximately 50mm/s is sufficient.
• The additional length is to be at least 44cm, of which as much as possible should
be driven to improve dexterity.
• Costs are a minor consideration due to the fact that this will be a research pro-
totype.
• The solution has to be reliable.
• Wear that would require maintenance is not allowed.
• End-effector needs to be resistant to environment of high humidity.
• Electro-magnetic fields affect sensor and transmitter performance.
• The axis has to be easily implemented into the control system to be programmed.
Many choices in design for range enlargement existed. A rough classification can be
seen in Figure 2.10. The two main options were adding a rod of fixed length or adding a
driven axis achieving variable length. Within the driven solutions, a number of options
existed for providing energy for the movement: Electric motors are widely used (stepper
or servomotors, AC or DC, brushed or brushless, etc. are all available in many different
designs). Hydraulic (liquid pressure) or pneumatic (air pressure) cylinders are used to
provide linear movements directly. Motion can be generated by rotary axes, electrical

32linear direct drives, rotary to linear motion converters or telescopic solutions. The most
common motion transducer designs are:
• Ball screw (twist prevented internally)
• Ball screw and two slides
• Rack and pinion
Actuator
Enlargment
Range
Driven Axis
Electric Pneumatic Hydraulic
Rotary to LinearConverter
Fixed Rod
RotaryLinearMotion
General Design
Figure 2.10: Possibilities for Range Enlargement
2.5.1 Evaluation of Options
Adding a rigid rod would have improved the range but decreased dexterity considerably.
It would have been a very cheap and easy to implement solution, but would have limited
the flexibility too much. Therefore this idea was dropped first. Hydraulic or pneumatic
cylinders are one option for providing linear movements, but because no pressurized
air or oil supply was available within the chamber, these options were also discarded.
Telescopic solutions typically are highly specific, complicated and heavy in design. Few
adaptable products are available on the market, and a custom solution would have been
too expensive and time-consuming. Therefore, these also were not investigated further.

33The existing robot has already five rotary axis, an additional rotary axis was not desir-
able. The addition of a linear axis has many advantages for the generation of motion
in this application. Many movements will be linear in nature, for example the tool
exchange as well as the gathering of data or samples.
2.5.2 Evaluation of Linear Motion Options
Direct-driven axis are often used for assembly robots or table drives. A problem is that
most solutions are bulkier than comparable designs with rotary drives. An exemplary
linear direct drive is shown in Figure 2.11. Cylindrical linear axis, as often used in
medical or precision applications, sometimes even including an additional rotary move-
ment, would fit the requirements perfectly. No product that was robust enough for this
application was obtainable yet. A comparison of electrical linear direct drives and axis
on basis of ball spindles is given in Table 2.6 [18], [19].
Figure 2.11: Linear Direct Drive, adapted from [20]
Rotary to linear motion converters are usually built using ball screws, such as that
shown in Figure 2.12. The ball screw is either driven by a belt, by gears, or the motor
is directly attached. Belt-driven spindles introduce elasticity that damps hard shocks
and they have a good relationship of driven length to overall length of the design. The

34
Direct Drives Ball Spindle Drives
High accelerations and velocities Slower, but sufficient
High accuracy due to low friction and
no elasticity
No slackness, but stick-slip effects
Heavy and bulky Lightweight and compact
Electro-magnetic fields Very high efficiency factor
Very quiet Can be noisy due to vibrations
Maintenance free Subject to wear
Designs expensive Cheap
Mostly customized Standardized, often modular
Table 2.6: Characteristics of Linear Direct Drives and Ball Spindle Drives
rotation of the nut has to be prevented in order to create motion.
Figure 2.12: Ball Screw and Nut, adapted from [21]
Electrical requirements for direct drives became less demanding, because most products
include integrated brakes to hold their position powerless. As well, electro-magnetic
fields are less disturbing than a couple of years ago. For high performance applications
a direct drive might be favorable due to higher speeds and accuracy. However, a linear
actuator using a ball screw and a rotary drive was sufficient for this application.

352.5.3 Evaluation of Motor Principles
Available options were servo and stepper drives, properties of both are summarized
in Table 2.7. The decision depended on which one could easier be integrated in the
control system of the existing robot. The available servo drives were more flexible in
programming, but were slightly more expensive. Stepper drives weigh a little bit less
but are often designed for use in systems with repeated similar motions patterns and
preprogrammed positions.
Stepper Servo
Controls open loop closed loop
External measurement system unnecessary necessary
Control properties easy more demanding
Dynamics poorer better
Positioning properties poorer better
Torque generation poorer better
Efficiency poorer better
Rotational velocity poorer better
Price cheap higher
Weight and size little better acceptable
Table 2.7: Properties of Stepper and Servo Drives, adapted from [19]
2.5.4 Selection
A product already including all needed components, such as motor, motion transformer,
controller and drivers, was preferable. However, most commercial products are modules
for robotic assembly or manufacturing systems designed for high positioning velocities,

36accelerations and accuracy and are too heavy for this application. A Smart Actuator
from Ultramotion was finally selected for range enlargement in this application. A
cutaway drawing of this linear actuator is given in Figure 2.13, Figure 2.14 shows a
picture of the chosen model, as well, the interface for control and power supply, the
selected mounting bracket and the end position switch, mounted to the tube of the ball
spindle, are shown. At the time the axis was selected, few was known about the controls
and interfaces of the robot in BioPlex. This actuator, driven by a servo motor, offered
good integration flexibility.
Figure 2.13: Cutaway of Smart Actuator, adapted from [23]
The design uses a self-locked ball screw, driven by a servo motor from Animatics over
a belt. The shown linear potentiometer is an additional option and was not ordered. It
was not necessary since the accuracy of the rotary encoder of the motor was sufficient.
The internal brake is included by default, but not needed in this application because
forces are low and the spindle is self-arrestive. The actuator is protected from overload
by a slip clutch in the drive train set to approximately 330N [27]. Drivers for the motor
are already included along with software that provides a programming interface. An

37MotorConnector Linear Axis
Belt Case Home Position Switch Bracket Mount Nose Rod Clevis
Figure 2.14: Smart Actuator
additional home position switch is mounted on the shaft. This is necessary to find
a predefined position again after loss of power. A rod clevis nose offered the best
possibility to mount the plug that is used as interface to the adapter. A block mount
was ordered to be used as connecting element to the robot. Characteristics of the chosen
linear actuator are given in Table 2.8.
2.6 Principles for the Remaining Partial Functions
Next step in the design of the end-effector was finding possible solutions for the re-
maining partial functions. Yet the relationship of the modules to each other was not
investigated.

38
Mass of motor 450 g
Mass of axis 900 g
Dimensions (ext./retract.) 540/330 mm
Force Limitation axial 330 N
Force Limitation radial 13 N
Belt ratio 2 : 1
Lead screw pitch 2.117mm (1/12in)
Encoder Rotary Resolution 2,000 counts/rev
Linear Resolution 1890 counts/mm
Supply Voltage 20-48 V
Current Consumption (max) 450 mA
Sample Rate 4 kHz
Velocity max 50 mm/s
Total Price $2100
Table 2.8: Characteristics of the Smart Actuator SA-2-A.083-8-K-1-B/NRC3, adapted
from [24]
2.6.1 Power Supply
Components that have to be supplied with energy are:
• Robot
• Linear actuator
• Sensors excluding the PPF probe (active principle)
• Camera
• Data transmission system (transceiver)

39The only existing power source available was the 24VDC battery pack. If the 24VDC
pack is used alone, it will be necessary to use voltage dividers to achieve the appropriate
voltage for every consumer. However, own power sources could be installed on the
adapter or on the motor mount.
2.6.2 Data Transmission
Crucial for the performance of the data acquisition process is routing the acquired data
from the adapter to the laptop. Important factors concerning data transmission are
the quality of the transmitted signal, the required effort including wiring and plugs,
interference with other signals and the reliability (potential loss of data) of the entire
system. Possible choices for data transmission are:
• Cables connecting laptop and sensors directly
• Data logger, download gathered information later
• Wireless technology, for example radio transmission or an infrared data link
2.6.3 Mechanical and Electrical Connector
One objective for this project was an exchange facility for the adapters. Therefore an
electrical (power and data) and mechanical interface had to be provided. Tasks and
requirements of the interface are:
• Maintain electrical connection during usage
• Provide secure mechanical connection
• Reliability

40• Protect pins and connector parts from damage
• Pilots to accommodate inaccuracies without damage to any parts
While a commercial product is cheaper and functionality is proven, a customized con-
nector can be designed, which might integrate more functions in one part and exactly
fits to this special application. There was a large variety of possible principles for the
general design of the mechanical connectors, including:
• Screwed connector requiring rotary motion for connection
• Snap or bayonet mount
• Snapping system for force connection, consisting of beams or springs
• Shape locking features and corresponding counterpart
• Design that clamps the adapter
• Magnetic
Ideas for electrical connectors include:
• Use an independent power supply on the adapter
• Use a common electrical plug or pin connector
• Design a custom connector using springs or other flexible parts
• Integrate electrical and mechanical connector
2.6.4 Rack
Unused adapters will be placed in the rack. The detailed tasks and requirements for
this module strongly depended on the final design of the adapters. Possible tasks and
considerations were:

41• Secure and reliable storage of unused adapters
• Prevent adapters from damage and dirt
• Equalize and compensate inaccuracies during tool exchange
• Safety features to ensure functionality or report errors
• Turns power on and off if batteries are used
• Loading of rechargable batteries if used
• Easy to manufacture, assemble, and expand
Possible solutions include:
• Adapter inserted in slot (vertical or horizontal)
• Design based on cylindrical, squared, or fork-like features
• Slots, able to provide the reagent force for the plugging process
• Threaded mounting device in rack
• Snapping feature
• Accommodate inaccuracies using pilots, elastic parts or by slackness
2.6.5 Software
At this stage a very brief look at tasks and frame conditions was sufficient. Software
development is addressed in Chapter 4. The following aspects were considered:
• Influence of interfaces, software and language on data transmission, sensors and
motor performance.
• Coordination of data acquisition and motion control.
• Requirements of the computer interface. If analog data is directly routed to the
computer, a data acquisition board will be needed. If data is transmitted digitally,
a serial communication port has to be used.

422.6.6 Adapters
The only function of the adapter module is providing mounts for sensors, tools, connec-
tors and electronics. The design of the physical parts of the adapter was depending on
the principle used for power and data transmission. The actual shape and requirements
were determined by later decisions.
2.7 Evaluation of Functions
The conceptual design, as shown in Figure 2.3, continues with the evaluation of the
partial functions. In this section the ideas generated were reduced to a reasonable
number of promising options.
2.7.1 Power Supply
The power supply of the video receiver and the data acquisition transceiver on the
computer side was easily achieved. Both are close to the laptop and can be directly
connected to the battery pack on the platform. The power supply of the linear actuator
required cabling from the platform to the tip of the robot. The remaining need was to
evaluate the options for the power supply for the sensors, the camera and additional
electronics. This task was difficult because power consumption of the transceivers and
additional electronics like microprocessors and the A/D converter were unknown at this
point.
If replaceable batteries were used they would have had to be integrated in the adapter,
adding additional weight and size. In any case, supply voltages had to be as low

43and as few as possible. Batteries deliver stable constant voltages, but only for a limited
time. This makes the use of batteries difficult for continuous measurements. Depending
on yet unknown overall power consumption of the components, the periods between
battery changes could be very short. This would violate the major intention of being
independent from crew time [2].
The use of rechargeable batteries solves the problem of dependency on a crew member
to change the batteries. A charging device could be integrated into the rack, placing
the adapter in the rack would install the connection. Unfortunately it does not solve
the problem of allowing continuous measurements. If the acquisition cycle is very long
lasting, loss of power is possible before recharging.
Another form of an own power supply on the adapter are solar panels. This would allow
continuous measurements if enough light is available and the power demands are low,
because no wiring outside the adapter would be required. This option was rejected for
this project because of unknown light and space conditions and high power consumption
of the components.
To supply power to the adapter using cables, one wire for each voltage is needed and
an additional wire for the ground, if every required voltage level is wired from the
platform through the robot. Weight and space would be saved on the adapters because
no additional components would be needed. Power supply had to be routed to the linear
actuator, so another option was forwarding this voltage to the adapters by cables along
the axis of the linear actuator. A stretching cord similar to a telephone cable could
be used. Then, voltage dividing electronics could be mounted to the adapter providing
continuous power for the sensors and transceivers.

442.7.2 Data Transmission
Characteristics of different transmission methods are discussed next. Points of interest
common to all options were supply voltage needed by some methods, power consump-
tion, bandwidth, reliability, and the potential ability to expand functionality in a later
stage of BioPlex. A data logger cannot be used in this application, because the stored
information would be downloaded in the rack and no real time data would be available.
Real time data is necessary as feedback for the system to control the chamber.
Cables could be used connecting the laptop and sensors directly. In this case a multi-
functional data acquisition board could have been used as an interface. Many different
multipurpose boards with sufficient capabilities are available for this task. However,
every sensor requires one line for the output and an additional ground cable is needed.
The use of cables requires a way to plug and disconnect, making the mechanical design
more complex. There is a limit to the number of cables that can be laid in the robot,
therefore the use of cables was limited.
Infrared communication is an effective and inexpensive possibility for short-range data
transmission. The idea of infrared data transmission was dropped because those systems
do not allow obstacles in the line of view due to the nature of the principle [22]. In the
plant growth chamber this cannot be guaranteed, so data might get lost as soon as an
obstacle is in the line of transmission.
Radio transmission is a form of wireless communication that is relatively easy to imple-
ment. Therefore, it was an attractive option to link the sensors to the computer. The
output signals could be transmitted to a receiver near the laptop and interfaced using
the serial communication port. Protocols ensure a safe transmission and prevent loss
of data. A drawback are electro-magnetic waves that can influence the performance

45of other functions in the system. Transmission itself can be faulty due to surrounding
waves. The transmitter would be an additional power consumer on the adapter and
adds space and weight.
2.8 Definition of the Principal Solution
The previously determined functions shown in Figure 2.4 had to be integrated into one
integral concept. The convergence towards a final solution started with the functions
that were most important in determining the overall design: power supply and data
transmission. The design requirements for rack, plug and adapters with mounts for
sensors, tools and additional electronics were independent from each other.
2.8.1 Mechanical and Electrical Connection
The linear axis had to be supplied with 24VDC from the battery on the platform. The
additional effort to route this voltage to the plug was relatively low, and the electrical
connection to the adapter was easily solved. Flexibility to add further components is
ensured. Therefore, the power supply was wired from the platform to the adapter. Pogo-
pins from QA Technology Inc were selected as electrical connectors. Springs within the
tube provide a force that presses the pins against the contact in form of a plate or
pin-shaped counterpart. They are widely used and are designed for use in PC board
testing tools or as contacts for removable displays of car radios. A spring travel of at
least 2mm was desired to accomodate inaccuracies reliably. Pins of the 100-16 series
with about 4mm stroke and an overall length of 25mm were chosen, a picture is given
in Figure 2.15.

46
Figure 2.15: Pogo-Pin, adapted from [25]
A simple force locking mechanism for the mechanical connection was favored over a
shape locking element. A shape locking solution would have required corresponding
parts in the rack and this would have complicated the overall design unnecessarily. It
was unnecessary to design a new locking mechanism because many low-cost parts were
already available for this purpose.
Ball plungers, as shown in Figure 2.16, provided the snapping part, and a simple notch
served as the counterpart. The design was very compact, easy to implement and pro-
vided a defined and repeatable position of the adapter. The chosen plungers had a 6mm
thread and a 3.5mm diameter ball. The distance from the end of the tube to the ball’s
top, defining the maximum spring travel, was 1mm for this design. Smaller plungers
were not desirable due to the short travel length of the spring. Plastic locking elements
were available, facilitating the fixing of the plungers. Each of the plungers provided
an initial force of 0.45lb/2.2N, higher forces would have been available as well. Two
plungers were used, so the force to disconnect was approximately 4.4N.
Figure 2.16: Ball Plungers, adapted from [26]
The electrical and mechanical connection is illustrated in Figure 2.17. The plungers

47were screwed into the insert and fit into the notch of the cylindrical forks of the plug to
form the mechanical connection. The electrical connection consisted of the pogo-pins
and the PC board with the contacts. The following features are indicated:
1. Ball Plunger
2. Insert
3. Fork
4. Pogo-Pin
5. Contact Board
5
4
3
2
1
Figure 2.17: Electrical and Mechanical Connection
2.8.2 Data Transmission
An evaluation of the options for data transmission is given in Table 2.9. The climatic
sensors already required five lines for data (one for each sensor, plus ground), and seven
lines were required for the linear motor. The addition of more sensors later would add

48more wires. Due to the number of cables and the accompanying wiring problems, radio
transmission was finally favored. No additional parts would be needed for cabling,
resulting in a good solution considering overall weight and size.
Cables Wireless
Weight + 0
Size + 0
Signal Quality + +
Effort - 0
Ease of Use 0 0
Control Properties 0 0
Extensibility - +
Table 2.9: Evaluation of Cables and Radio Transmission
2.8.3 Allocation of Sensors to Adapters
Sensors require different handling and orientation due to their characteristics. An im-
portant question was if every sensor should have its own adapter or if a multi-functional
head was favorable. An evaluation was carried out, which is summarized in Table 2.10.
Separate adapters for each sensor make the adapters small and easy to handle dur-
ing sampling. All sensors can be mounted easily to meet their requirements. A small
adapter would have improved ability to reach points that have limited accessibility.
It was found that all of the required climate sensors could be mounted on one adapter.
The physiological sensors could be mounted to another adapter. The main advantage
of this setup was that the cycle time for the entire data acquisition process would be
shortened considerably, because all climatic or physiological data of a given point within

49
Separated All in One
Weight + 0
Size + 0
Positioning close to plants + 0
Cycle Time - +
Table 2.10: Evaluation of Separate and Multi-Functional Adapters
the chamber were obtainable at the same time. A multi-functional adapter would be
moderately heavier and bigger than separate adapters considering the overall weight
of the end-effector. Design effort and control properties depend on the placement and
implementation of electronics for data acquisition and radio transmission. Weighing
these factors, a multi-functional solution was chosen. The self-plugging adapter design
approach allows for increased future functionality because additional adapters can be
developed for holding the grabber and carrying other sensors. The final system will
consist of at least three adapters:
• Adapter 1: Climate Sensors (Temperature, Relative Humidity, Air Velocity, PPF)
• Adapter 2: Physiological Sensors (Plant Stress, Porometer, Chlorophyll)
• Adapter 3: Grabber or Cutter
2.8.4 Conceptual Design Summary
The preceding sections evaluated several ideas for the design. Finally, the resulting
design approach consisted of the following components:
• Linear actuator

50• Frame structure for the plug device
• Frame structure for the adapter
• Counterparts for mechanical and electrical connection
• Sensors and their mounts
• Electronics for data acquisition and transmission
• Voltage dividing circuit for power supply
• Rack insertion feature
2.9 Embodiment Design
During the embodiment design, the final shapes of plug, adapter and rack were deter-
mined. The design followed the sequence presented in Figure 2.18 and regarded the
checklist presented in Figure 2.2. After the main functional parts, the remaining less
important features were designed. Optimization and testing for essential errors finished
the embodiment design phase. Screws are omitted in the following exploded drawings
in order to maintain clarity.
2.9.1 Climatic Sensors Adapter
The layout of the climatic sensors adapter is shown in Figure 2.19. The module consisted
of the following components:
1. Plate
2. Air velocity sensor electronics
3. Stand-offs for mounting of the electronic boards
4. RF transceiver board

51
Principal Solution
Detail Design
Forward to
Optimization
Features
Design of Side
Design of Main
Features
Specifications
Shape Determining
Figure 2.18: Sequence in Embodiment Design
5. PPF probe
6. Temperature and relative humidity probe
7. Frame of the air velocity probe mount
8. Air velocity probe
9. Bracket of the air velocity probe mount
10. Data acquisition board
11. Ball plunger
12. PC board with contacts for the pogo-pins
13. Insert

52
Figure 2.19: Layout of the Climatic Sensors Adapter
A symmetric design was desired for balanced weight of the climatic sensors adapter.
The compact shape ensured improved ability to reach points close to obstacles. Sensor
tips were desired to be as close to each other and as far in front as possible. All sensors
had to be mounted in a way to provide the best possible position according to their
functionality:
• Temperature and Relative Humidity: Both properties have no orientation, so the
sensor could be mounted anywhere on the adapter.

53• Photosynthetic Photon Flux: Needed to be perpendicular to the source of light.
None of the components could block the path of light.
• Air Velocity: The tip had to be exposed and the sensor needed to be positioned
concentric to the wrist. That way, rotation of the wrist can be used to deter-
mine direction in which the air velocity is strongest in a plane. This facilitated
determination of the origin of the air stream.
2.9.2 Plug
The layout of the plug is given in Figure 2.20. The plug consisted of the following
components:
1. Plug body
2. Camera
3. Camera mounting plate
4. Camera mounting bracket
5. Voltage dividing electronic mounting plate
6. Voltage dividing electronic board
7. Pogo-pin
8. Pogo-pin mounting block
9. Forks
The camera is used with all tools, therefore it was mounted on the plug module. The
additional H-shaped frame and the mounting plate were introduced to be able to adjust
the view angle of the camera according to the requirements. A further advantage was
simplified design and smaller dimensions of the plug body. A mounting facility for the

54
Figure 2.20: Layout of the Plug Module
voltage divider electronics was included. The pogo-pins for the electrical connection
shown in Figure 2.15 were mounted on the bottom of the block, corresponding to the
position of the contact block on the adapter. An additional electrical isolating mounting
was necessary.
The linear actuator and the plug device required a joint without slackness that was
easy to manufacture and mount. A tight fitting reamed hole and a pin fixing the
position from the side was chosen. This solution provided a defined concentric mount

55and conducted the forces during usage well. The forks were designed as cylindrical parts
screwed into the main body. The reason for this decision was the ease of manufacture,
especially considering the mounts to the main body of the plug. The diameter of the
forks was chosen in respect to the required notch serving as counterpart to the ball
plungers for mechanical connection.
2.9.3 Rack
The layout of the rack is given in Figure 2.21. Because there was no information about
where in the chamber the adapters might be stored, the preliminary rack just served
as a facility to test the plugging mechanism. It consisted of a plate and two cylindrical
parts in order to keep it as simple as possible. The chamfers served as pilots for the
plugging, inaccuracies are equalized by slackness between the components.
Figure 2.21: Layout of the Preliminary Rack

562.10 Detail Design
Detail design is the last step in the sequence of the design process, adding dimensions,
materials, measures, tolerances, chamfers and other details. Wherever possible the parts
were made of aluminum, because it is an inexpensive and easy to machine material that
is stainless and strong, yet lightweight. The detail design finally resulted in the following
documents:
• Measured drawings of all parts
• Drawings of assemblies and sub-assemblies
• Documentation and compilation of related materials
2.10.1 Adapter
Plate
The plate is shown in Figure 2.22. The indicated holes are used for mounting of the
following components:
1. Air velocity probe mount
2. Data acquisition board
3. PPF sensor
4. Holes for insertion into the rack
5. Air velocity sensor electronics
6. Insert
7. RF transceiver

57
1 2 3 4 5 6 7
Figure 2.22: Plate
The plate was designed to serve as a frame structure for the adapter. The main decision
was whether to use a thicker sheet with tapped holes or a thin sheet with clearance holes.
Tapped holes are more difficult to manufacture and are hard to repair when damaged,
therefore a 1.5mm sheet was used. The heads of four flat head screws fixing the insert
on the plate had to be countersunk. Otherwise they would have been in the way of
the electronics of the air velocity sensor. These screws were chosen because the parts
don’t have to be re-assembled constantly with high precision and an easy to assemble
and space-saving joint was needed. The two holes near the center act as inserts to
the rack and provide the counter force when the adapter is stored. Because all central
locations on the plate were occupied by sensor probes, this was the only possibility and
the symmetric design ensured an even distribution of mounting forces. A clearance of
0.1 to 0.2mm was specified for compensating inaccuracies in positions.

58Insert
The insert is shown in Figure 2.23. The indicated holes are used for mounting of the
following components:
1. Ball plungers
2. Temperature and relative humidity probe
3. Contact board for the pogo-pins
4. Insertion of the forks of the plug
5. Data acquisition board
6. RF transceiver
7. Mounting the insert onto the plate
8. Air velocity sensor electronics
1
2 3 4
5
6
7
8
Figure 2.23: Insert
The insert integrates many mechanical functions into one part and serves as a heat
sink for the electronics. The mechanical connection to the forks of the plug required

59reamed holes, the diameters were specified to form a sliding fit with a clearance of 0.01
to 0.03mm. The holes were highly chamfered to act as a pilot, improving insertion
performance. The notch behind the contact plate was needed for cabling.
Air Velocity Probe Mount
The air velocity probe mount is shown in Figure 2.24. The probe was mounted on a
structure consisting of a frame(2) and a bracket(1) that clamps it. The location above
the Vaisala probe was the only way to provide a central mount for all probes and was
an easy way to align the air velocity probe with the axis of the wrist of the robot.
1
2
Figure 2.24: Air Velocity Probe Mount
2.10.2 Plug
Plug Body
The plug body is shown in Figure 2.25. It contains holes to mount the other components
of the plug device and is used as heat sink for the voltage supply board. The indicated

60holes are used for mounting of the following components:
1. Camera mount bracket
2. Pin for fixing the mounting position of the plug
3. Pogo-pin mount
4. Forks
5. Mounting the plug body to the linear axis
6. Voltage supply board
1
2
3
4
5
6
Figure 2.25: Body of the Plug
Fork
One of the forks is shown in Figure 2.26. The following features are indicated:

611. Width across the flats to facilitate mounting
2. Thread for screwing the fork into the plug body
3. Notch as counterpart to the ball plunger
4. Pilot for reliable insertion into the adapter
The plane shoulder of the forks ensure orthogonal position of the mounted forks. The
chosen diameter of 8mm was determined by the size of the ball plungers and the required
notch. The notch was measured according to Figure 2.27.
1
2
3
4
Figure 2.26: Forks
Figure 2.27: Layout of the Notch and Ball Plunger Connection (in mm)

62Camera Mount
The entire camera mount is shown in Figure 2.28. It consisted of the following parts:
1. Camera mount bracket
2. Camera joint
3. Camera with included radio transmitter
In order to attach the wireless video camera to the plug, an additional bracket serving
as a camera mount was introduced. The camera itself was mounted to the camera joint,
the resulting 2-DOF mount improved adjustment. The bracket has tapped holes on one
and screw clearance holes on the other side; long cheese-head screws were used to clamp
the mount against the plug body and the camera joint against the mount.
1
2 3
Figure 2.28: Camera Mount Bracket

63Pogo-Pin Mounting Block
The pogo-pins were mounted on an electrically insulating plastic block, which is shown
in Figure 2.29, the block was screwed to the plug body, using clearance holes (1).
Seven connectors were provided in order to supply power to the adapter and maintain
flexibility in case that more pins are needed for future changes in the design, the pins
were inserted into clearance holes (2).
1
2
Figure 2.29: Mounting Block for the Pogo-Pins
2.11 Summary
The intended plugging mechanism is illustrated in Figures 2.30 and 2.31. The robot and
the linear actuator of the end-effector need to position the forks of the plug concentric
in front of the adapter insertion holes. The end-effector inserts the forks by performing
a linear motion, the ball plungers snap into the notches and the pogo-pins connect to
the contact board. Then, the robot lifts the plugged adapter from the rack. The next
chapter discusses required electronic components, power supply and communication
between computer, end-effector and adapter.

64
Figure 2.30: Plugging Mechanism, Adapter in Rack
Figure 2.31: Plugging Mechanism, Adapter plugged and taken from the Rack

65
Chapter 3
End-Effector and Adapter
Electronics
This chapter describes the design and layout of the electronics that were required for
data acquisition and power supply. As well, communication between the control pro-
gram on the computer, and the micro-controllers of the linear actuator and the climatic
sensors adapter was addressed. No cables for data transmission were required, because
wireless communication was implemented. Necessary links for transmission of data and
control signals are shown in Figure 3.1. Required connections for power supply are
illustrated in Figure 3.2.
Usually data acquisition boards are used to interface a computer. For this project, all
components and functionality like signal conditioning and analog to digital conversion
were already included in the adapter electronics. The resulting digital data was trans-
mitted, interfaced using the serial communication ports: COM1 was used for motor,
COM2 for sensor communication.

66
Controls
COM Port
Data Flow
COM Port
Computer
Video Port
Camera
Robot
Interface
Adapter
Actuator
Figure 3.1: Data and Control Signal Flow
VideoReceiver
DataTransceiver Electronics
Data TransceiverSensors
Adapter
Camera
Actuator
RobotBattery
Figure 3.2: Required Power Supply

673.1 Linear Actuator
The linear actuator that was selected in Section 2.5.4, shown in Figure 2.14, is driven
by a brushless DC servomotor, which uses a closed loop PID controller and a built-in
amplifier. The motor was accompanied by its own software for monitoring, PID control
and programming. This section illustrates interfacing and programming of the linear
actuator.
3.1.1 Power Supply and Communication Interface
An illustration of sockets and LED’s on top of the motor can be seen in Figure 3.3,
the 7-pin combo D-SUB connector shown in the middle serves as the interface to wire
the motor to the power supply and one of the serial ports of the computer. Correct
polarity of the power supply is ensured if the servo LED (shown on the lower right
corner of Figure 3.3) turns red. The same LED turns green when the motor receives
power during trajectory or on programmed stop. Initializing the program opens the
selected serial port for communication with the motor. The trajectory LED (upper
right corner of Figure 3.3) turns green during motion. The default protocol for data
exchange is RS-232 with a Baud rate of 9600, 8 data bits, 1 stop bit and no parity.
3.1.2 Home Position Switch
The home position of an axis is its reference for the absolute position. The Smart
Actuator lacks an internal reference, so an external home position switch was mounted
to the tube in order to be able to find the defined ”0” position again after loss of power,
the mounted home position switch is shown in Figure 2.14. When the axis moves and

68
Figure 3.3: Connectors of the SM1720M version 4.12, adapted from [24]
hits this switch, the motor stops immediately and the software can set the reference
position. It is not possible to disable the switch with a programmed command; the
motor always stops when the switch is reached.
3.1.3 Programming the Smart Motor
The motor can either be programmed and operated with the Smart Motor Interface
(SMI) software or by customized software written in C, C++ or Visual Basic. The
microprocessor of the motor is case sensitive and invalid code is ignored. For this
project, the motor was controlled in ”position mode”, in which the position of the
axis is controlled based on the rotary encoder signal [24]. The axis is operated in
host/slave mode, which means that the motor executes commands sent directly from an
external computer program. Table 3.1 lists the basic commands used in this application

69(# indicates a value in encoder counts, calculated according to the transformations
presented in the next section).
Command Explanation
MP Absolute position mode, default
P# Absolute position
D# Relative position
V# Velocity
A# Acceleration
G Go, execute specified motion profile
S Stop move abruptly, motor still on
OFF Stop and turn motor servo off
RP Report current absolute position
RBt Report motion status
O# Set origin
Table 3.1: Basic Motor Commands
3.1.4 Calculations for the Generation of Motion
In this section, the values for the programming of position, velocity and acceleration
of the linear axis are calculated. The used variables are shown in Table 3.2; necessary
motor parameters are listed in Table 3.3.
Position
The axis is driven by the Animatics Smart Motor SM1720M version 4.12. Feedback of its
current position is created by a 500-line optical encoder read in quadrature, resulting

70
Variable Explanation
Plin linear change in position
vrot,sc scaled internal rotational velocity
vlin intended linear velocity
arot,sc scaled internal rotational acceleration
alin intended linear acceleration
Table 3.2: Variables for the Calculation of Motion
Parameter Value Explanation
Rrot 2000 countsrev
rotary encoder resolution
Rsc 131, 072, 000 scaledcountsrev
internal velocity resolution scale factor
n 2 belt drive ratio (2 : 1)
p 1
12
inrev
lead screw pitch
Ts 4069 samples
ssample rate of the servo
Table 3.3: Motor Parameters for the Calculation of Motion
in a 2000 counts per revolution rotational resolution [12]. The corresponding linear
resolution is:
Plin =Rrot ∗ n
p= 1, 890
counts
mm(3.1)
Referring to Table 3.1, the command to move the axis by 1mm would be ”D1890”.

71Velocity
The sample rate of the servo is Ts = 4069 samples
s. Internally, the Smart Motor uses
scaled counts (sc), the resolution factor for this motor is:
Rsc = Rrot ∗ 216 = 2000 ∗ 216 = 131, 072, 000sc
rev(3.2)
The equation for transforming a desired linear axis velocity into the required scaled
motor velocity command is:
vrot,sc =vlin ∗Rsc ∗ n
p ∗ Ts
= vlin ∗ 30437sc ∗ s
sample ∗mm(3.3)
Using this equation and referring to Table 3.1, the command specifying a linear velocity
of 1mms
would be ”V30437”. Scaled rotational velocity is measured in scaledcountssample
.
Acceleration
The acceleration command specifies how fast the motor reaches the velocity that was
chosen for the trajectory. The same value is used for decelerating to stop at the com-
manded position. The scaled acceleration is calculated using:
arot,sc =alin ∗Rsc ∗ n
p ∗ Ts
= alin ∗ 7.4804sc ∗ s
sample ∗mm(3.4)
Using this equation and referring to Table 3.1, the command specifying a linear acceler-
ation of 1mms
would be ”A7” (only integers are allowed). Scaled rotational acceleration
is measured in scaledcountss∗sample
.

723.2 RF Transceiver
Devices that can both send and receive data are called transceivers. Digital strings of
data are sent, replacing a cable. Suitable protocols ensure transmission without loss or
corruption of data. The selection of the board had to respect:
• Flexibility to include additional sensors and motor communication
• Prevent interference with other transmitters (camera uses 900MHz)
• Transmitter frequency that doesn’t require a license
• Required transmission range is from tip of robot to platform (1.5m)
• Power supply of same level as needed for the tools
• Current consumption as low as possible
• Size and weight as small as possible
• Resolution of 10 bits sufficient
Many low cost microprocessors with integrated radio transmission capabilities were
available. A pair of DPC-64-RS232 Intelligent FM Transceiver Modules from Abacom
Technologies were chosen for transmission of data, processing 8-bit serial input at a
Baud rate of 9600. Features of the transceivers are given in Table 3.4, Figure 3.4 shows
a picture of the device. The transceivers have a 3-wire serial interface (Tx, Rx, Ground),
data formatting, encoding and decoding are done by an on-board micro-controller. The
transceivers have an internal communication protocol preventing loss of data during
transmission.

73
Power Supply 7.5-15VDC
Consumption 20mA
RF I/O impedance 50Ω
Range 150m
Operating Frequency 433.92 or 418MHz
Size 73.5 x 53 x 15mm
Price, each $180
Table 3.4: Features of the RF Transceiver, adapted from [28]
Figure 3.4: RF Transceiver Board
3.3 Voltage Supply Board
The power supply requirements were mainly determined by voltage level and power
consumption of the tools and sensors specified during the mechanical design. Different
voltage levels were necessary to supply all components with power, the required voltages
for all components and the available source are shown in Table 3.5. The currents drawn
during common usage of the components, according to the manufacturers, are given in
Table 3.6.

74
Device Voltage
Supply from Battery Pack 24V
Motor 20-48V
Camera 9-12V
Air Velocity Sensor 10-16V
Relative Humidity & Temperature Sensor 7-28V
Micro-Controller Unit 4-6V
Voltage Level Shifter and Amplifier 20V
RF Transceiver 7.5-15V
Table 3.5: Required Supply Voltage Levels
Device Current
Camera 70mA
Air Velocity Sensor 50mA
Relative Humidity & Temperature Sensor 2mA
Micro-Controller 6.4mA
RF Transceiver 20mA
Table 3.6: Specification of Power Consumption
The layout of the power supply board is shown in Figure 3.5, Figure 3.6 shows a picture
of the manufactured board. From Table 3.5 was concluded that three different voltage
levels were sufficient:
• 5V for the microprocessor
• 12V for camera and sensors
• 20V for the voltage level shifter

75
INOUT
CAM V3
V2
V1
Figure 3.5: Power Supply Board Layout
The board contains additional resistors and capacitors that act as filters for ripples in
the supply voltage.
• IN: indicates the pins for the 24VDC input
• OUT: pins for Ground and the three output voltages
• CAM: additional pin connector to branch off the 12VDC supply for the camera.
• V1, V2 and V3: voltage regulators providing the required voltage level
3.4 Data Acquisition and Signal Conditioning
Board
In most computer controlled data acquisition systems, tasks like filtering, amplifica-
tion and analog-to-digital signal conversion are performed by data acquisition boards

76
Figure 3.6: Power Supply Board
plugged directly into the computer. The RF transceiver system processes strings of
serial data, therefore these functions had to be executed by an electronic board on the
adapter. The required circuit board layout is shown in Figure 3.7, and a picture of the
board is shown in Figure 3.8. The board was equipped with three spare analog inputs
in case that more sensors will be added and an additional spare serial port.
• P: Power supply connector
• OSC1: Oscillator providing timing for the MCU
• SP1: Serial port, connecting to the RF transceiver
• RS: RS-232 voltage level converter and UART for the additional serial port
• SP2: Additional serial port
• OSC2: Oscillator providing timing for the UART
• PH: In-circuit programming header
• LED: LEDs that can be used for diagnosis
• QAMP2: Quad amplifier
• IN S: Spare analog voltage inputs for sensors

77• IN AV: Air velocity sensor input
• IN RH: Relative humidity sensor input
• IN PPF: Photosynthetic photon flux sensor input
• IN T: Temperature sensor input
• QAMP1: Quad amplifier
• MCU: micro-controller unit
• PS: power supervisor for the MCU
RS
PH
SP1
P
OSC1
LED
MCUPS
OSC2 QAMP2
QAMP1
IN S
IN T
IN PPF
IN S
IN RH
IN S
IN AV
SP2
Figure 3.7: Data Acquisition and Conditioning Board Layout
On the right and the bottom, seven connectors were included for analog input. Four of
them were needed for the climatic sensors; three additional spare connectors for more
sensors and an additional serial port for optional wireless motor communication in the
future were added. The power supervisor was required as a protection feature for the
micro-controller.

78
Figure 3.8: Data Acquisition and Conditioning Board
The universal asynchronous receiver/transmitter (UART) is responsible for performing
the main task in serial communications with computers, the device changes incoming
parallel information to serial data and performs timing, parity checking, etc. The MCU
already contains one UART, another one was required for the additional serial port.
The acquired data string is transmitted to the first serial port that is connected to the
radio frequency link. The four pins are transmit (Tx), receive (Rx), Ground and 12V
power supply for the RF link.
Data acquisition is controlled by an Atmel AVR micro-controller unit, the analog inputs
provide 10-bit resolution for analog-to-digital conversion [12]. The MCU has one serial
interface and internal clocks. More features of the micro-controller are listed in Table
3.7. When the control program, which is discussed in Chapter 4, requests data, the MCU
was programmed to start the actual acquisition of data. The analog input voltages,
provided by the sensors, are converted into their digital representation and assembled

79to a string of data, as shown in Figure 3.9. This string is then forwarded to the wireless
transceiver system and sent to one of the serial ports of the computer.
Power Supply 4-6VDC, 6.4mA
Included A/D Converter 8-channel, 10-bit
Programmable I/O 32 lines
Memory 4kB
Frequency 0-8MHz
Table 3.7: Features of the Micro-Controller, adapted from [29]
d0 1023 d1 1023 d2 1023 d3 1023 d4 0 d5 0 d6 0 \n
TemperatureSensor
SensorRelative Humidity
Air VelocitySensor
SensorPPF
Spare
Spare
Spare
End ofString
Data Range 0 − 102310−bit Values
Figure 3.9: Exemplary Data String, as assembled by the MCU
The quad amplifiers take care of signal conditioning, and shift and amplify the sen-
sor output to the full range of 0-5V for the expected maximum range of the physical
property. This allows the use of the full bandwidth of the A/D converter and results
in the best achievable resolution. The output voltages of the probes for their entire
bandwidth and the values of the physical property resembling 0 and 5V (corresponding
to the 10-bit values of 0 and 1023 in the digital representation) are given in Table 3.8.

80
Sensor Output signal min max
PPF 0 - 0.8V 0µmol
m2s4000µmol
m2s
Air velocity -10 - +10V -5ms
+5ms
Relative humidity 0-1V 0% 100%
Temperature 0.5-0.7V 10C 30C
Table 3.8: Specification of Analog Voltage Signals
3.5 Pogo-Pin Connector Plate
The electrical connection between the plug and the adapter was done by pogo-pins,
mounted to an isolating plastic block, connecting the connector plate. Four pins were
used in order to connect the electric components on the adapter to the power supply
board on the plug. Three additional contacts were provided in order to be able to
connect the serial port of the motor to the additional serial port on the data acquisition
board, if actuator control is desired to be done wireless in the future. The plate is
shown in Figure 3.10, it uses the assignments shown in Table 3.9.
1 2 3 4
5 6 7
Figure 3.10: Pogo-Pin Connector Assignments

81
Color Assignment
1 red 5V Supply
2 blue Tx Transmit
3 yellow 12V Supply
4 orange 20V Supply
5 brown Serial Ground
6 purple Rx Receive
7 black Power Ground
Table 3.9: Pogo-Pin Connector Assignments
3.6 Summary
This chapter described the electronics that were required for power supply and commu-
nication of the end-effector. The next chapter explains the program that was written
in order to accomplish data acquisition and motion control of the linear axis.

82
Chapter 4
Software
This chapter describes the programming of software for control of data acquisition,
storage and display of data and control of linear actuator motion. For these tasks, the
user has the following options:
• Acquisition of single data points and continuous sets of data
• Saving acquired data automatically or on command
• Acquisition on command or when the end-effector reached its destination
• User selectable motion profile
• Automatic adapter exchange
• Recalibration of sensors.
Figure 4.1 shows the appearance of the graphical user interface. All events are executed
by left mouse clicks on buttons and switches on the main panel. Right mouse clicks open
pop-up panels with brief information about the functionality of the respective control
and indicator. The linear actuator needs to be referenced and a file for saving data

83has to be specified before the program is fully operable. Slides allow the user to select
sampling period and the number of data points in continuous acquisition mode. In
the motion control part, the user can adjust acceleration, velocity and desired position
of the end-effector. The program that creates these functionalities is described in the
following sections. An example of an output file of saved data is shown in Figure 4.2
Figure 4.1: Front Panel of the Data Acquisition and Motion Control Software
4.1 Selection of the Programming Language
The first decision was to select a suitable programming environment. The following
requirements had to be met:

84
Figure 4.2: Exemplary Output File
• Program had to be Windows NT compatible
• Graphical User Interface, nice looking display and easy to use controls
• Easy to program and compile
• Control of end-effector, robot and data acquisition possible
• Resulting program fast enough to perform real time execution
In the beginning the graphical programming environment LabView was favored. It
provides libraries for all common control buttons, indicators, interfaces and communi-
cation with serial ports but is too slow for real time applications, because the resulting
program is not compiled and the program is executed from top to bottom in a repeat-
ing loop. Compared to procedural programming, object oriented programming reduces
programming effort considerably because many software entities are reusable objects
stored in libraries. Object oriented programs tend to be more understandable, better
organized, easier to maintain, modify and debug [30]. Visual Basic or C++ provide
object oriented programming capabilities using ActiveX libraries. LabWindows/CVI

85from National Instruments was finally selected, because its libraries are easier to use.
It generates a skeleton program structure that the programmer fills with commands in
C or other programming languages afterwards. The resulting program is event driven,
responding to events like a keyboard shortcut or a mouse click.
4.2 Design of the Graphical User Interface
The first step in software development with LabWindows/CVI was the design of the
graphical user interface. The GUI, shown in Figure 4.1, is the interface between the
user and the actuators and tools on the end-effector [31]. Before selecting appropriate
controls and indicators, a list of desired program capabilities was generated:
• Acquisition of single data points
• Performing continuous measurements
• User selectable sampling period and number of data points
• Graphical display of data
• Storage of data in files for further processing
• Allow user to adjust sensor calibration
• Move the end-effector to a desired position
• Selectable motion profile of the linear actuator
• Sample data point when position is reached
• Monitor current position of the axis
• Perform adapter exchange
Display of camera images, control of the robot, coordination of motion of the robot and
the linear actuator, and coordination of motion and data acquisition were outside the

86scope of this project. The main objective was to create an interface that was as user
friendly as possible. In order to accomplish this, a layout with one panel including all
major controls and indicators was desired. The GUI, shown in Figure 4.1 was built by
selecting controls from the library and entering all desired attributes and appearances
before the program was compiled. Controls that needed an input by the user before
first use had to be hidden and reminders for activation and timers were added.
4.3 Program Logic
The following sections explain the actions and decisions that the program executes once
the user invokes a function by a left mouse click on the appropriate control button.
Flowcharts illustrate necessary events, the sequence in which they are executed and
error handling routines.
4.3.1 Logic for Data Acquisition
The program allows several ways of data acquisition, executed on user command or
when the linear actuator reaches its destination. Therefore, a separate data acquisition
function facilitated the programming, it is shown in Figure 4.3.
First, the data acquisition function needs to establish communication with the MCU of
the adapter according to the established communication protocol. The control program
on the computer sends a request for data acquisition. The function displays an error
message if the computer does not receive the character sent as the acknowledgment
signal by the MCU. The user can try to establish communication again, or he can abort
the data acquisition process. If the function received the acknowledgment, it commands

87
POP−UP
string error
POP−UPcommunication
SEND start
acknowledge? RECEIVE
RECEIVE data
WRITE
to buffer array
to result arrayWRITE buffer
SPACE
READ
FALSE
POP−UP
READ
digit
REQUEST data
ELSE
SPACE
NUMBER
TRUE
TOOL
END READ
digit
digit
according to
NO
retry?
error
YES
DATAARRAY
ERRORABORT
CommunicationProtocol
tool number
Figure 4.3: Data Acquisition Function
the MCU to acquire sensor data, compose and send the data string according to the
principle illustrated in Figure 3.9. Afterwards, the function needs to decompose the
string, and the sensor data is assigned to an array that is handed back to the requesting
function call. Errors in the string due to faulty assembly or transmission result in an
error message and aborted data acquisition.
The sampling mode switch allows the user to swap between acquisition of single data
points and continuous measurements. In the default single acquisition mode, the con-

88trols for selection of sample period and number of data points and the reset button for
continuous measurements are hidden.
Hitting the data acquisition start button starts the logic given in Figure 4.4. First action
is the request for the selected sampling mode. In single acquisition mode, the program
acquires data by using the data acquisition function shown in Figure 4.3. The values of
successful acquisition are then displayed on the data point indicators. The data points
are saved to the specified file if the auto save function is activated. By default, a header
is written, indicating the sensor associated with each column of acquired data. For
convenience, an additional first column is written indicating the used sampling mode
and successive numbering of the set of acquired data.
DELETEarrays and graphs
number of datapointssample periodGET
DIMcontrol continuous
ACTIVATEacquisition timer
point indicator
SET
AUTOSAVE?
OFF
ON
− point to path
WRITE
SINGLEMODE?
CONT
DATA ACQUISITION FUNCTION
TIMER FUNCTION
Figure 4.4: Data Acquisition Start Button Logic

89In continuous mode, possibly existing graphs and data arrays from former continuous
data acquisition processes are deleted. The next step is to obtain the desired number
of data points and sample period. Once the continuous data acquisition was started,
the switches that allow the user to select the desired sampling period and number of
data points are dimmed. The program must be able to receive other commands during
data acquisition. Therefore, a timer is enabled that executes the data acquisition in
continuous sampling mode.
The logic of this timer function is shown in Figure 4.5. First, the timer acquires sensor
data according to the data acquisition function shown in Figure 4.3. Then, the new data
is appended to the data array of the continuous acquisition process. This new array
is displayed on the graph indicator. When the last data point was received, the timer
disables itself, activates the previously hidden switches for selection of sampling period
and number of data points and saves the array if the auto save option was selected.
The data acquisition stop button is only visible when continuous data acquisition is
in progress and allows abortion of the continuous data acquisition at any time. This
button was found to be necessary in case that an undesirable measurement series was
started, or the acquisition function indicates an error in data transmission. The timer
is disabled, and the mode switch, sampling period and number of data points slides are
reactivated. Data and graphs of this cycle are erased.
4.3.2 Data Representation
Calibration converts the digital value back into the original sensor data, according to
Table 3.8, for display on indicators or graphs or for storage. Usually, no changes in
sensor calibration should be necessary. However, if sensors are exchanged or subject to

90
DISABLE
ACTIVATE
AUTOSAVE?
SAVE data
acquisition timer
control continuous
DATA ACQUISITION FUNCTION
UPDATE PLOTgraph indicator
APENDnew data toexisting sensor array
END OF
CYCLE?YESNO
YES
NO
Figure 4.5: Timer Events
drift, the user is able to adjust the offset and sensor gain within the program. The logic
for the sensor calibration button is illustrated in Figure 4.6. The calibration button
opens the pop-up panel shown in Figure 4.7. Because the program uses linear interpo-
lation between the minimum and maximum values, the user enters the desired physical
property corresponding to 0 and 1023 (the extremes of the 10-bit digital representa-
tion). Hitting the OK button applies the changes and closes the panel. The main panel
remains active and is operable while the pop-up panel is open.

91
UPDATE− variables
− new valuesREQUEST
CLOSE− pop−up panel
− pop−up panelDISPLAY
with current values
Figure 4.6: Calibration Adjustment Logic
Figure 4.7: Calibration Adjustment Pop-up Panel

924.3.3 Logic for Storage of Data
Path and file name need to be specified before data can be saved, and hitting the select
path button opens a file select pop-up panel. The name of the new file then can be
entered in the command line. The name and location of the file are entirely arbitrary
and selection of an existing file deletes its content. The user can save the data as a
text file with a ”txt” ending. The data is stored in plain ASCII, separated by a tab for
further processing by spreadsheet programs. Finally, the auto save switch and the save
button are activated.
The overwrite check box was added to allow the user to specify whether he wants to
replace the old data with the set of data to be acquired next, or if new data should be
appended to the old data. Hitting the save button subsequently writes the content of
the current data buffer to the selected file according to the sampling mode which was
used to acquire the data. Activation of the auto save switch doesn’t cause immediate
action, except disabling the save button in order to avoid saving the same data twice.
Disabling auto save will activate the save button again. Data acquisition routines check
the status of the auto save button and save data in the selected file if this switch is
activated. Data of aborted continuous data acquisition is not saved.
4.3.4 Logic for Tool Exchange
The tool exchange button executes a procedure to equip the robot with a new adapter
according to the logic shown in Figure 4.8. The adapter to be used next can be chosen
from a menu in the pop-up panel shown in Figure 4.9. Clicking on the OK button starts
execution of the tool change. First the program checks which adapter is currently in
use. Nothing happens if the user selects the same adapter again. Otherwise, a motion

93profile to store the formerly used adapter in its appropriate rack slot and another motion
profile to plug-in a new adapter is executed.
NO
− new adapterGET
SAME
REQUEST
− new adapter
CHECK
− active adapter
− active adapter
STORE
YES
Figure 4.8: Tool Change Logic
Figure 4.9: Selection of New Adapter Pop-up Panel

944.3.5 Logic for Motion Controls
The logic for the set reference button is illustrated in Figure 4.10. For repeatable
motion, the reference point has to be found after power is turned on or after loss of
power during usage. Referencing needs to begin with a short extending movement in
case the motor is already at the retracted limit. Then the actuator was programmed to
retract until the switch is hit. The encoder position is then set equal to zero and the
motion start button is activated.
MOVE
short extension
MOVE
retraction
HOME?
REACHED?
SET reference
ACTIVATEmotion startbutton
NO
YES
YES
NO
Figure 4.10: Set Reference Logic
The logic for the motion start button is shown in Figure 4.11. The start button on the
actuator control side of the user interface starts motion according to the parameters
adjusted by the slides. First step is to obtain the selected values for final position,

95velocity and acceleration. Those values have to be sent to the motor. Until the final
position is reached, the current position indicator is updated on timer events. As soon
as the end-effector reaches its destination, the program checks if the automatic data
acquisition switch is enabled. If this is the case, data is acquired by using the data
acquisition function shown in Figure 4.3, the data is displayed in the corresponding
indicators and stored in the selected file, if the automatic data save option is active.
SAVE
− data points
AUTOSAVE
WRITE
− to COM port
AUTODAQ NO
− data points
GET
DISPLAY
− data points
NO
REACHED NO
YES
DISPLAY
− current position
YES
− final position
− velocity
GET
− acceleration
YES
Figure 4.11: Start Motion Logic
The motion stop button interrupts the current motion profile. It allows the user to stop

96a motion profile before termination, for example in case an obstacle was determined. No
data is sampled and the position, velocity and acceleration values remain unchanged.
Hitting the start button again resumes the interrupted motion profile. The motor uses
the new values in case they were altered in the meantime.
Alternatively, the motor can be controlled by text input line, in this case, every com-
mand has to be sent separately by pushing the enter button on the right side of the
window. This allows input of all possible motor commands to be executed. This is
recommended only for users that are familiar with the Smart Motor programming lan-
guage and want the motor to perform in a way different from the modes provided by
the other controls of the program.
4.4 C Program
The following sections explain the structure of the C-program that was written in order
to realize the intended logic.
4.4.1 Structure and Organization
The program begins with a list of included header files. In addition to some basic C
header files, there are headers for the user interface resource files (the graphical user
interface and the pop-up panels). A list of CVI library prototypes and other function
prototypes follows. Global variables, arrays and pointers are declared after the compact
main body. Usually it is desired to use local variables whenever possible [30], but
because most variables are needed by several different functions, many global variables
were required.

97The action that starts the function implementing the logic of the button is called an
event. The event on which the buttons react is chosen as a left mouse click in this
program, called commit (EVENT COMMIT). Other possible events could have been
right mouse clicks, double-clicks, short-cut key combinations and more. Every user
event executes the function assigned to it, called a CVICALLBACK. Every function
call is handled sequentially. LabWindows/CVI has no possibility to apply priority levels,
so they are all treated equally and executed one after the other in order of occurrence
[31].
4.4.2 Main Body
The main body of the program is very small. The first statements prevent a crash of
the system due to lack of memory. Subsequent statements stop the program if the user
interface can’t be loaded for any reason. Then, ”OpenComConfig” opens and initializes
the serial port COM1. ”DisplayPanel” displays the user interface. When in use, the
program remains in the ”RunUserInterface” function. It allows executing the functions
specified later in the code on the resembling event. The program runs until ”0” is
returned by the ”QuitUserInterface” function.
4.4.3 Implementation of Serial Communication
Serial ports have to be initialized and opened, configuration parameters were discussed
earlier. In this program, COM1 is used for communication with the end-effector actua-
tor, and COM2 is used for communication with the adapter MCU. In general, devices
that aren’t currently in use should be shut down; however, the motor needs to be con-
nected all the time, because its micro-controller erases all transmitted data once the

98connection is interrupted.
On the other hand, the connection to the MCU that transmits sensor data needs to
be closed after data is received and opened again before the next data package can be
sent due to the way the communication protocol is implemented on the MCU. Because
initialization of serial ports is a time-consuming operation, this reduces the speed of the
data acquisition process for continuous measurements considerably. The data acquisi-
tion process was programmed to follow a communication protocol between computer
and MCU on the adapter. It ensures that both sides are ready and connected and that
all data is transmitted without corruption or data losses. The following very simple
protocol was used:
1. The program sends the request that data is needed.
2. The MCU confirms by sending an answer.
3. The computer signals the MCU that the answer came through.
4. Data acquisition is started, the string is assembled and sent.
4.4.4 Timed Events
Timed events were necessary for data acquisition and updating the current position.
LabWindows/CVI has a timer function that creates a callback whenever the predefined
period expired. The display of the position of the linear axis is updated every 0.2s during
a trajectory. Data sampling starts as soon as the axis is within 500 encoder counts of the
final position. Because the motor oscillates slightly around the final position, a second
timer was introduced that updates the position display 1s after the motor reached
its goal. It is not possible to define the timer interval with a variable. Therefore,
the data acquisition timer creates interrupts every 0.1s, which is the smallest user

99selectable increment. According to the desired sampling period, the program executes
data acquisition on corresponding multiples of this interval.
4.5 Summary
This chapter discussed the programming of software for data acquisition and motion
control using the designed end-effector and the climatic sensors adapter. The next
chapter describes the assembly and evaluates the testing of the design.

100
Chapter 5
Assembly and Evaluation
The earlier chapters explained the design and selection of all end-effector and adapter
components, the design and implementation of required electronics and the program-
ming of software for control of data acquisition and actuator motion. This chapter
discusses the assembly and testing of the reconfigurable end-effector, consisting of the
linear actuator and the plug device, and the climatic sensors adapter. A picture of the
testbed used for the experiments is shown in Figure 5.1.
5.1 End-Effector
Figure 5.2 shows a picture of the plug device sub-assembly, a picture of the assembled
end-effector is shown in Figure 5.3. The plug device was built by screwing the forks into
the plug body and mounting the camera to the bracket-like extension. It was positioned
by clamping the bracket against the plug body. The voltage supply board was mounted
to the back of the plug device, the electrical connectors required adjustment of the
mounting position. The pogo-pins were inserted into the isolating mounting block,

101Robot
Teach Panel RackAdapterLinear Actutor Plug Device
Computer
Figure 5.1: Setup of the End-Effector Testbed
which was mounted to the bottom of the plug body. Then, camera and pogo-pins were
wired to their respective connector pins of the board.
The home position switch of the linear actuator was mounted approximately 3mm before
the retracted limit of the ball screw in order to protect the clutch, mounting it before
the extended position would require a lot of space for the homing procedure. The plug
of the switch was connected to the left limit input of the connector shown in Figure 3.3.
The plug device sub-assembly fit tightly on the nose of the linear axis and its position
was secured by an aligning pin. The weights of the end-effector and its components are
listed in Table 5.1.

102
Fork Pogo−Pin Connector
Power Supply BoardCamera Mount Camera
Mount for Linear Actuator
Figure 5.2: Plug Device Sub-Assembly
Component Weight
Linear Actuator 1350g
Plug Device 95g
End-Effector 1445g
Table 5.1: Weight of the End-Effector and its Components
5.2 Climatic Sensors Adapter
Figure 5.4 shows a picture of the assembled climatic sensors adapter. The insert was
screwed to the plate using flat-headed screws in order to be able to mount the air velocity
probe electronics on the opposite side of the plate. The plastic locking elements of the
ball plungers allowed adjustment of their position without any additional components.

103Camera
Linear Actuator Plug Device
Home Position Switch Connector
Figure 5.3: End-Effector Assembly
Cables were soldered to the pogo-pin contact plate, which was mounted to the insert.
The sensors were screwed into their mounts and the electronic boards were mounted
using nylon screws and stand-offs in order to create space for cabling. Wiring difficulties
required several slots and notches, so that electrical components on the opposite sides
of the plate could easily be wired. The cables were made longer than necessary in order
to maintain flexibility of the prototype. The resulting weight of the assembled adapter
is 315g, including all sensors and electronics.

104RF Transceiver Antenna Data Acquisition Board
Insertion Holes Ball Plunger Air Velocity Probe PPF Probe RH and Temp. Probe
Figure 5.4: Climatic Sensors Adapter Assembly
5.3 Experiments
This section describes and discusses the testing of the design. Several experiments
were carried out in order to verify the functionality of the end-effector, the intended
plugging procedure, and in order to test data acquisition, wireless data transmission.
Data acquisition and linear actuator motion was controlled by the software written for
this project.
The testbed that was used for the experiments was shown in Figure 5.1. The end-
effector was mounted directly to the wrist of a robot in the lab using a preliminary bent
angle and the bracket mount of the linear actuator. The robotic arm that will be used
in the Biomass Production Chamber was not available for testing. The climatic sensors
adapter was inserted into the preliminary rack, which was clamped to a nearby table.
The actuator and the power supply board were connected to a 24VDC power source,

105and the actuator and one of the transceivers were linked to the serial ports of a remote
computer in the lab.
For testing the mechanical and the electrical plugging mechanism the robot was con-
trolled by using its teach panel. First, the robot moved into a position aligning the forks
of the plug concentric in front of the insertion holes of the adapter insert, as seen in
Figure 5.5. By hitting the tool exchange button of the control software, the end-effector
connected to the adapter by creating the linear motion that plugged the forks into the
inserts of the adapter. This is shown in Figure 5.6. Afterwards, the robot removed
the adapter from the rack, shown in Figure 5.7. Data acquisition and transmission
was tested by executing the continuous measurements function of the control software
with the mounted adapter, varying sampling period and number of data points during
several data acquisition cycles. In order to put the adapter back in the rack, the same
sequence of events was inverted.
Figure 5.5: End-Effector before Plugging

106
Figure 5.6: Plugged Position
Figure 5.7: Adapter removed from the Rack

1075.4 Evaluation
The design requirements for the reconfigurable end-effector and adapter system were
illustrated in the problem identification of Section 2.2. Table 5.2 gives an overview of
how well these requirements were met, the next sections discuss the results in detail.
The following rating convention is used for the evaluation:
+ Solution fulfills the requirements satisfactory
0 Solution is acceptable, but could be improved
- Solution needs improvement in order to meet the requirements
Requirement Rating
Automatic Exchange Mechanism +
Size and Spacial Conditions of the Design 0
Kinematic and Kinetic Requirements +
Forces and Mass 0
Quality of the Acquired Data 0
Data Transmission Properties +
Display, Storage and Processing of Data +
Power Supply +
Control Properties +
Reliability, Safety and Ergonomics 0
Materials, Machining and Assembly 0
Table 5.2: Evaluation of Design Performance

1085.4.1 End-Effector and Plugging Mechanism
Linear Actuator
The evaluation for the end-effector actuator is given in Table 5.3. The bracket mount
and the nose rod clevis provided good mounting capabilities. Control and serial com-
munication were easy to program and motion capabilities and stability of the axis met
the requirements as expected. Negative effects of the electro-magnetic field, which is
caused by the motor, were not observed. The weight of the actuator was acceptable,
but already close to the allowed 1.5kg for the entire end-effector.
Requirement Rating
Mounting and Interfacing +
Fulfillment of Tasks +
Weight 0
Size +
Motion Characteristics +
Stability and Forces +
Power Supply and Consumption +
Control Properties +
Table 5.3: Evaluation of the Actuator
Camera System
The video camera and transmitter system is evaluated in Table 5.4. The camera is very
compact and lightweight and the signal quality was found to be sufficient. An exposed
mounting position was required in order to avoid obstacles in the direct line of sight,

109endangering the delicate tapped holes and the housing of the camera.
Requirement Rating
Weight +
Size +
Mounting 0
Resolution +
Image Quality +
Power Supply and Consumption +
Table 5.4: Evaluation of the Camera System
Power Supply
The power supply board is evaluated in Table 5.5. The board was easy to mount and
connect. It worked very well in the beginning, but became too hot during usage due
to the packed layout. This led to drift of the sensor output, interruption of the data
transmission due to the changing supply voltage was not observed.
Mechanical Connections
The evaluation for the plugging mechanism between end-effector and adapter and the
rack insertion is given in Table 5.6. All concerned parts were lightweight, small, cheap
and easy to manufacture and assemble. The chosen clearance between the insertion
holes of the adapter and the forks of the plug led to a connection that was easy to
insert and provided a tight fit without slackness. The chamfered insertion holes serving
as pilots worked reliably. Canting while inserting the adapter in the rack was not
observed. The force provided by the selected spring of the ball plungers was found to

110
Requirement Rating
Fulfillment of Tasks 0
Weight +
Size +
Reliability 0
Ease of Implementation +
Flexibility +
Power Consumption -
Table 5.5: Evaluation of the Power Supply Board
be too low to provide a reliable mount. Plungers with stronger springs were tested, but
they would have damaged the forks by carving the aluminum.
Requirement Rating
Plugging Functionality +
Rack Insertion Functionality +
Size +
Weight +
Reliability -
Wear and Maintenance 0
Adaptability +
Table 5.6: Evaluation of the Mechanical Connections
Electrical Connector
The evaluation for the pogo-pin connector is given in Table 5.7. Due to the tiny size of
the connector it was difficult to solder the cables to the pins and the contacts on the

111board. The implemented pins were longer than necessary and the improvised soldering
of the connecting cables added further length, so that the pins almost conflicted with
the front end of the linear axis. Power was transmitted reliably during the experiments,
even when shaking the adapter manually. The seven pins provide enough capacity for
future extension of the adapter functionality.
Requirement Rating
Reliability +
Size 0
Weight +
Adaptability 0
Table 5.7: Evaluation of the Pogo-Pin Connector
5.4.2 Climatic Sensors Adapter and Data Acquisition Process
Sensors Selection and Placement
The implemented sensors and their placement are evaluated in Table 5.8. The sensors
were easy to mount, but the cables required a lot of space. The mounting positions of
the sensors were chosen in order to achieve a compact adapter. Heat dissipation from
the data acquisition board affected the temperature measurements and the shielded
position of this probe hardly allowed any air circulation at the probe tip.
Data Acquisition
The data acquisition board is evaluated in Table 5.9. Acquisition of data, control and
assembly of the strings functioned well, but size and placement of the board affected

112
Requirement Rating
Weight +
Size +
Mounting and Interfacing +
Accuracy and Signal Quality +
Probe Placement -
Power Supply and Consumption 0
Table 5.8: Evaluation of the Sensors
the adapter performance strongly. The outlines of the data acquisition board mainly
determined the size of the adapter and diminished the ability to acquire data close
to plants or in narrow and packed areas. Flexibility to include motor control data or
additional sensors into the wireless transmitted string of sensor data was provided.
Requirement Rating
Fulfillment of Tasks +
Reliability +
Weight +
Size -
Placement 0
Flexibility +
Table 5.9: Evaluation of the Data Acquisition Board
Wireless Data Transmission
The evaluation of the radio transceiver is given in Table 5.10. The transceiver system
behaved exactly like a cable between serial port of the computer and serial port of the

113data acquisition board. The transmission was reliable during testing. Flexibility to
expand the system to one with more than two transceivers for additional sensors and
motor communication is given.
Requirement Rating
Weight +
Size +
Reliability 0
Ease of Implementation +
Flexibility +
Power Supply and Consumption +
Table 5.10: Evaluation of the Transceiver System
5.4.3 Software
Table 5.11 shows the evaluation of the software for testing and demonstration of the
end-effector design. Linear actuator motion for testing of the plugging mechanism was
easily controlled. The continuous data acquisition and display on the graphs was handy
for monitoring of effects like changes in light intensity or impacts of the breath of a
test person near the sensors of the adapter and for testing of the reliability of the radio
transmission system. Interruptions of the serial communication link or the power supply
were detected, the pop-up panel allowed to re-establish the communication or abort the
acquisition process during the experiments. The fastest obtainable data acquisition
time was approximately 0.3s.

114
Requirement Rating
Appearance of the GUI +
User Friendliness +
Functionality +
Speed 0
Stability and Reliability 0
Table 5.11: Evaluation of Software Performance
5.5 Summary
This chapter illustrated the evaluation of the design. The final chapter summarizes
the conclusions drawn from the results of the evaluation and gives recommendations in
order to overcome the remaining problems.

115
Chapter 6
Conclusions and Recommendations
6.1 Conclusions
This chapter discusses the results of the design evaluation. The following conclusions
were reached as a result of the evaluation:
1. The general feasibility of a reconfigurable end-effector design to be used for data
acquisition within the Biomass Production Chamber was proven.
2. The experiments with the prototype developed in this project identified the fol-
lowing major problems: The adapter is too bulky, the electronic boards are too
space consuming and the placement of the electronics influences the measure-
ments. The adapter was designed to be as compact as possible, but a slim design
would have been preferable.
3. The placement of sensors and electronics affects the performance of the design
negatively. The design of the components allows easy modification of the original
assembly configuration, shown in Figure 5.4. Two alternatives were found to

116overcome the major problems:
• Removing all electronics from the adapter and mounting them on the end-
effector, either on the back of the plug device at the current location of
the voltage supply board or at the mount of the linear actuator, shown in
Figure 6.1. This allows a very small and pointed adapter but requires more
cabling effort. Optimized shape results in a slim and compact adapter with
improved flexibility in probe placement and facilitates exchange and storage
properties. No differences in data transmission and power supply properties
are expected, but more pins for the additional adapters would be needed.
• Lengthening the adapter by redesigning the plate, shown in Figure 6.2. This
change is very easy to implement, the end-effector remains unchanged, the
placement of the probes is improved and the adapter can be designed slim
at the tip.
minimized Adapter
on PlugVar 1
Var 2on Actuator Mount
bundled Electronics
Figure 6.1: Alternative Placement of Electronics on the End-Effector
4. The Smart Actuator was found to be a good solution for the required range
enlargement. Aluminum design and seals ensure resistance against environment
effects.

117
Figure 6.2: Redesigned Adapter allowing improved Probe Placement
5. The wireless camera was found to be a good solution for image acquisition, the
signal quality of the camera is outstanding considering the tiny size of the device.
6. In general, the force-locking design of the plugging mechanism with ball plungers
was found to be a good and easy to implement solution.
7. Using stronger ball plungers will provide a reliable connection, but the forks need
to be redone in order to sustain the higher pressure on their surface during the
insertion.
8. The chamfered insertion holes used as pilots (for the forks and the insertion into
the rack) were found to be sufficient. No further pilots are required.
9. The electrical connector, formed by the pogo-pins and the contact plate, was found
to be reliable. The used pogo-pins were obtainable for free and had sufficient
qualities in order to verify the feasibility of the principle. Other models with
better suited dimensions and heads are obtainable.
10. Signal quality and mounting capability of the implemented comparatively cheap

118standard probes was found to be sufficient, at least for testing of this prototype.
Whether resolution, accuracy and signal quality are good enough for the applica-
tion in the Biomass Production Chamber requires more information.
11. The current placement of the temperature and relative humidity sensor under-
neath the data acquisition board was found to be poorly chosen.
12. The data acquisition board worked well. The bulky shape of the adapter was
determined by the size of the board, optimization of its layout allows to shrink
the size of the adapter considerably.
13. The voltage supply board needs to be improved, the heat generation is not ac-
ceptable. Housing of the board will further degrade the heat dissipation.
14. Independent power supplies are required in order to omit cables along the linear
actuator. More detailed information about the intended use of the end-effector
and conditions within the BPC will be needed in order to consider alternatives
such as solar panels or rechargeable batteries. In this case, energy-conserving
electronics, tools and sensors would be required.
15. The chosen principle for wireless communication was found to be reliable, but
problems due to interference with other transmitters and obstacles within the
Biomass Production Chamber are possible.
16. Using more than the two implemented transceivers in order to transmit motor
control or additional sensor data will require a more sophisticated communication
protocol and control program.
17. The software worked well for testing of the prototype, but the serial communica-
tion with the MCU for data acquisition should be improved. So far, the program
just detects interrupted connection and faulty strings. Faster data acquisition

119and improved error handling is achievable by replacing the library function im-
plemented for serial communication by common C code. If no data can be read
from the serial port, the library function waits until a timeout occurs and asks
the user for correction. Usually, the connection during the acquisition process is
intact, just the string was not received. The new program should request the data
string again automatically, and prompt the user only if the same error occurred
again.
18. The flexibility of the software could be further improved by options for user se-
lectable port configuration, memory of changed sensor calibration, shortcut keys
and improved display of data.
6.2 Recommendations
The following recommendations resulted from the experiences made during the design
and testing of the system and will improve the prototype:
1. Altering the adapter according to Figure 6.2 is recommended in order to form
a slim adapter tip for improved reachability. It requires less cabling than the
modifications shown in Figure 6.1 and the system is more flexible for future de-
velopment, because every adapter comprises its electronics instead of bundling
the electronics for all tools on the end-effector.
2. The weight of the end-effector could be reduced if a suitable tubular linear direct
drive would be found or designed. Even a hollow design, allowing cabling within
the axis is thinkable.
3. Usage of stainless or hardened steel forks and implementation of a stronger plunger
model is required.

1204. The pogo-pins should be replaced by a version with shorter tubes and shorter
spring travel in order to save space. Pins with chisel heads might further improve
connectivity.
5. The pogo-pin mounting block should be scaled up, allowing more space between
the pins for easier soldering of the cables. A lower mounting position or longer
plug body allows more space between tube of the linear axis and the electrical
connectors.
6. The data acquisition board should be redone and compressed once it is determined
which functionality is really needed. Four analog inputs and one quad-amplifier
might be sufficient, and the additional serial port might be unnecessary.
7. So far, the acquired sensor data is calculated from theoretical values. Real cali-
bration is necessary in order to provide reliable data.
8. The power supply board should be redone. The body of the plug can be used as
a heat sink if necessary.
9. Regarding the possibility of the use of alternative power sources in the future,
customized probes with lower power demands should be considered. The periph-
eral electronics, as needed for the air velocity probe, could then be bundled with
the other electronic devices.
10. Radio transmission of control data for the motor of the linear actuator should
be achieved. One possible solution would be transmitting the signals using the
transceiver that is already used for sensor communication. In this case either
sensor or motor signals have to be wired along the linear axis depending on which
modified setup is used. An additional serial port in order to do this is already
included on the data acquisition board. Adding another similar transceiver, so

121that sensor and motor signals use separate transceivers is recommended in order to
reduce wiring effort. Both solutions require sophisticated software for coordination
of signal transmission.
11. Re-programming of serial communication using plain C code and improve coordi-
nation between the control software and the program of the MCU.
12. The final design requires housings to shield all components and prevent damage
by collisions, dirt and moist.
13. Once the adapter is shielded by a housing, the mount for the camera should be
reconsidered. An extra actuator for automatic positioning of the camera could be
introduced if this additional feature is desired.
14. Depending on mounting conditions of the robot used in the BPC it might be desir-
able to design a new lid for the belt case of the actuator that provides mounting
facilities to both the actuator and the robot and use it instead of the bracket
mount on the tube.
15. The cables on the adapter should be shortened when the final positions of the
components are determined.
6.3 Outlook
This section lists tasks for further development of the system that were not subject of
this project:
1. Additional adapters need to be designed for the physiological sensors and a tool for
taking plant samples. Adapters for individual sensors could replace the multiple
sensor adapter if desired.

1222. The coordination of motion and data acquisition was not addressed in this project.
An expanded program will be needed to create motion patterns for data acqui-
sition within the Biomass Production Chamber, including path generation and
avoidance of obstacles.
3. Another remaining task is the coordination of motion of the eight degrees of
freedom of the robotic system, consisting of the 2-axis transporter, the 5-axis
robot and the end-effector with its linear axis, as shown in Figure 1.5. It will be
necessary to solve the inverse kinematic problem for the three entities, either with
a program to be developed or with an already existing commercial product.
6.4 Summary
This project investigated many design aspects of a reconfigurable end-effector to be used
for data acquisition in the Biomass Production Chamber. Improvement of the prototype
developed in this project is required in order to achieve a system with satisfying overall
performance, but the expected result after the discussed propositions are implemented
looks very promising. Further improvement of error handling, stability and reliability
of the process, as well as optimization of the physical components requires experiences
that can only be gained by testing of the end-effector design in the Biomass Production
Chamber or a similar environment.

123
Appendix A
Basics of Robotics
Encyclopedias describe robots as versatile programmable machines imitating creatures
and their functions. Robotic science is a synthesis of statics, dynamics, electrical en-
gineering, control theory and programming. The difference between robots and other
automation devices is the flexibility in programming. It has to be differentiated between
software that controls the robot and software written by the user to control the actual
motion. Robot motion can be programmed in teach mode, by specialized robot lan-
guages, or arbitrary high level computer programming languages with special libraries
and subroutines for robot programming. Robot mechanics can be divided in problems
concerning the kinematic (motion) and kinetic (forces) of the robot. Main interest in
robot control is the orientation and position of links, joints and tools in 3-D space.
When talking about the position of the robot, the tool point is commonly addressed.
It is usually defined as the tip of the tool or the base of the tool mount. Kinematic
equations in matrix form relate the coordinate system assigned to the tool to the base
frame as seen in Figure A.1.
The trajectory is the history of position, velocity and acceleration for every joint, or the

124
Base Frame
Workpiece Frame
Tool Frame
Figure A.1: Base, Tool and Workpiece Frames
actual path the tool point takes from one point to the other. The position of all links
during the trajectory is a concern in avoiding obstacles. When modeling a robot, links
are usually considered rigid. Calculation of the tool point from given joint coordinates
is called the forward kinematic problem. In robot control the desired position is given,
and the corresponding joint angles are unknown. Solving the equations of motion for
the unknown joint angles in order to achieve a certain position and orientation is called
the inverse kinematic problem. This is a difficult and complex problem to solve. First
step hereby is determining the position and orientation of the desired tool frame relative
to the base frame. Then the set of possible joint variables is calculated.
The equations are usually nonlinear, closed and numeric solution methods are imple-
mented. Single, multiple or no solutions at all may exist. If multiple solutions for the

125joint variables lead to the same position and orientation, an algorithm has to be used
to decide which set of joint angles will be used. Reasonable choices might be nearest,
smallest motion in a certain joint, energy optimization or obstacles. As an example, a
robot with six rotational DOF can have up to 16 solutions. The availability of solu-
tions for the position of the tool point defines the reachable workspace. The dextrous
workspace is defined as the subspace of the reachable workspace in which the tool point
can reach the position in all possible orientations [5].
Commonly each joint has one degree of freedom operated by an independent actuator.
The position of this joint is measured by a sensor providing feedback for its control. In
order to describe the position of a point in space (in this case the origin of a coordinate
system), three coordinates are sufficient. For orientation of the coordinate system three
additional coordinates are necessary. Therefore, a robot needs six independent degrees
of freedom (DOF) in order to be able to reach an arbitrary point in arbitrary orientation.

126
Appendix B
Basics of Data Acquisition
Data Acquisition (DAQ) is the branch of engineering dealing with taking signals from
analog sources and converting them for further processing by a computer, printer or
display. The use of a computer replaces an entire conventional instrument. A computer
for used for data acquisition is therefore called a ”virtual instrument”. The acquired
data can be used for record or control purposes. The signal can be an analog voltage or
current. Voltages are measured relative to ground, which represents the 0V potential.
Signals are transferred to digital numbers, a series of numbers is called ”data”. Table
B.1 is a short summary of some keywords [8], [13]. The components of an entire DAQ
system are illustrated in Figure B.1. All components are available as single units or
combined to multi-functional boards.
• Sensors or transducers convert the physical quantity to be measured into a pro-
portional electrical signal. It’s the device that generates the actual data
• Signal conditioning contains circuits that prepare the raw analog data for the
analog to digital converter. This includes filters, amplifier and sample-hold de-
vices. Filters are used for anti-aliasing and reduction of unwanted high frequency

127
Accuracy Closeness of the measured value to the true value
Precision Closeness of measured values, when repeated using different de-
vices.
Repeatability Closeness of measured values using same devices and conditions.
Resolution Smallest detectable change in the physical property measured.
Sensitivity Change of the sensor response due to the change in the signal.
Calibration Elimination of systematic errors by subsequently adjusting the dif-
ference between the true value and the indicated measure using an
accurate reference.
Table B.1: Definition of Keywords in Metrology
Sensor
ComputerInterfaceADC
MultiplexerConditioning
Figure B.1: Components of Data Acquisition Systems
interference. Amplifiers adapt low sensitivity sensor signals, increasing gain and
bandwidth.
• Multiplexer: Consists of a set of switches connecting alternative input signals to
following single devices. The multiplexer is controlled by the computer.
• Analog to Digital Converter (ADC): Represents the analogue signal as a product
of a reference voltage and a number, which is then represented in binary code for

128further processing by the computer.
The sensor output is a function of the input. For most sensors, the relationship between
input and output is approximately linear for a certain area of validity [8]. The errors
between the assumed linearity and typical behavior of real sensors is shown in Figure
B.2. Evidently, sensors might show a behavior that is a combination of those errors.
Assumption
IN
OUT
OUT
IN IN
OUT
OUT
ININ
OUT
Zero−Based Linearity Error
Terminal Linearity Error Independent Linearity Error
OffsetGain Error
Real
Figure B.2: Common Measurement Errors

129
Appendix C
Basics of Serial Communication
Control of the end-effector actuator was achieved by serial communication between the
computer and the microprocessor of the motor. RF links, as used for transmission of
data and controls between the computer and the adapter, use serial communication as
well. Serial is a very common protocol for device and instrumentation communication
and standard on almost every computer. The serial port sends and receives ASCII data
one bit at a time. Serial communication is slower than parallel, but simpler and more
reliable.
RS-232 is the serial connection found on IBM-compatible PCs. It is also used for con-
necting a mouse, printer, or modem. RS-485 is an improvement, increasing the number
of possible devices and allowing networks of devices connected to a single port. Serial
ports are able to transmit and receive data simultaneously. Important characteristics
of serial communication are baud rate, data bits, stop bits, and parity, for two ports to
communicate, these parameters must match. For simple communication three lines are
sufficient: Transmit (Tx), Receive (Rx), and Ground. Additional handshaking lines are
used to solve problems such as the receiver be overloaded. Terminology:

130• Baud Rate: The Baud rate indicates the number of bit transfers per second, the
speed of data transfer in bits per second. The Baud rate is referred to as clock
cycle as well, since it is a measure for the sampling period of the port in Hz.
• Data Bits: Data bits are a measurement of the actual data bits in a transmission.
Usually standard 7-bit ASCII characters with values from 0 to 127 are sent, some-
times the enhanced 8-bit ASCII character set is used. Therefore, the data packets
have a size of 7 or 8 bits. A packet refers to a single byte transfer, including
start/stop bits, data bits, and parity.
• Stop Bits: Stop bits signal the end of communication for a single packet. In
addition, they give the computers some room for error in clock speeds.
• Parity: Parity is a simple form of error checking used in serial communication.
The types of parity are: none, even, odd, marked, and spaced. It allows the
receiving device to determine if noise is corrupting the data or if the transmitting
and receiving device clocks are out of sync.

131
List of Figures
1.1 Layout of BIO-Plex, adapted from [1] . . . . . . . . . . . . . . . . . . . . 2
1.2 Mass, Energy and Data Flow for the BIO-Plex Project, adapted from [2] 3
1.3 Profile of the Biomass Production Chamber with Dimensions in cm,
adapted from [2] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4 Robotic Arm, adapted from [3] . . . . . . . . . . . . . . . . . . . . . . . 5
1.5 Degrees of Freedom . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.6 Reconfigurable End-Effector with mounted Climatic Sensors Adapter . . 8
2.1 Design Process . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2 Checklist for Layout of the Parts . . . . . . . . . . . . . . . . . . . . . . 13
2.3 Steps in Conceptual Design . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.4 Functional Modules shown without Relationships . . . . . . . . . . . . . 20
2.5 AVS1000 Air Velocity Probe, adapted from [11] . . . . . . . . . . . . . . 23
2.6 Humitter Temperature and Relative Humidity Probe, adapted from [14] . 25

1322.7 PPF Probe, adapted from [16] . . . . . . . . . . . . . . . . . . . . . . . . 27
2.8 Digital Video Camera inclusive Transmitter, adapted from [17] . . . . . . 29
2.9 High Gain Video Receiver, adapted from [17] . . . . . . . . . . . . . . . . 29
2.10 Possibilities for Range Enlargement . . . . . . . . . . . . . . . . . . . . . 32
2.11 Linear Direct Drive, adapted from [20] . . . . . . . . . . . . . . . . . . . 33
2.12 Ball Screw and Nut, adapted from [21] . . . . . . . . . . . . . . . . . . . 34
2.13 Cutaway of Smart Actuator, adapted from [23] . . . . . . . . . . . . . . . 36
2.14 Smart Actuator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.15 Pogo-Pin, adapted from [25] . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.16 Ball Plungers, adapted from [26] . . . . . . . . . . . . . . . . . . . . . . . 46
2.17 Electrical and Mechanical Connection . . . . . . . . . . . . . . . . . . . . 47
2.18 Sequence in Embodiment Design . . . . . . . . . . . . . . . . . . . . . . 51
2.19 Layout of the Climatic Sensors Adapter . . . . . . . . . . . . . . . . . . . 52
2.20 Layout of the Plug Module . . . . . . . . . . . . . . . . . . . . . . . . . . 54
2.21 Layout of the Preliminary Rack . . . . . . . . . . . . . . . . . . . . . . . 55
2.22 Plate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
2.23 Insert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
2.24 Air Velocity Probe Mount . . . . . . . . . . . . . . . . . . . . . . . . . . 59

1332.25 Body of the Plug . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
2.26 Forks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
2.27 Layout of the Notch and Ball Plunger Connection (in mm) . . . . . . . . 61
2.28 Camera Mount Bracket . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
2.29 Mounting Block for the Pogo-Pins . . . . . . . . . . . . . . . . . . . . . . 63
2.30 Plugging Mechanism, Adapter in Rack . . . . . . . . . . . . . . . . . . . 64
2.31 Plugging Mechanism, Adapter plugged and taken from the Rack . . . . . 64
3.1 Data and Control Signal Flow . . . . . . . . . . . . . . . . . . . . . . . . 66
3.2 Required Power Supply . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.3 Connectors of the SM1720M version 4.12, adapted from [24] . . . . . . . 68
3.4 RF Transceiver Board . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.5 Power Supply Board Layout . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.6 Power Supply Board . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
3.7 Data Acquisition and Conditioning Board Layout . . . . . . . . . . . . . 77
3.8 Data Acquisition and Conditioning Board . . . . . . . . . . . . . . . . . 78
3.9 Exemplary Data String, as assembled by the MCU . . . . . . . . . . . . 79
3.10 Pogo-Pin Connector Assignments . . . . . . . . . . . . . . . . . . . . . . 80
4.1 Front Panel of the Data Acquisition and Motion Control Software . . . . 83

1344.2 Exemplary Output File . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
4.3 Data Acquisition Function . . . . . . . . . . . . . . . . . . . . . . . . . . 87
4.4 Data Acquisition Start Button Logic . . . . . . . . . . . . . . . . . . . . 88
4.5 Timer Events . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
4.6 Calibration Adjustment Logic . . . . . . . . . . . . . . . . . . . . . . . . 91
4.7 Calibration Adjustment Pop-up Panel . . . . . . . . . . . . . . . . . . . . 91
4.8 Tool Change Logic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
4.9 Selection of New Adapter Pop-up Panel . . . . . . . . . . . . . . . . . . . 93
4.10 Set Reference Logic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
4.11 Start Motion Logic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
5.1 Setup of the End-Effector Testbed . . . . . . . . . . . . . . . . . . . . . . 101
5.2 Plug Device Sub-Assembly . . . . . . . . . . . . . . . . . . . . . . . . . . 102
5.3 End-Effector Assembly . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
5.4 Climatic Sensors Adapter Assembly . . . . . . . . . . . . . . . . . . . . . 104
5.5 End-Effector before Plugging . . . . . . . . . . . . . . . . . . . . . . . . 105
5.6 Plugged Position . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
5.7 Adapter removed from the Rack . . . . . . . . . . . . . . . . . . . . . . . 106
6.1 Alternative Placement of Electronics on the End-Effector . . . . . . . . . 116

1356.2 Redesigned Adapter allowing improved Probe Placement . . . . . . . . . 117
A.1 Base, Tool and Workpiece Frames . . . . . . . . . . . . . . . . . . . . . . 124
B.1 Components of Data Acquisition Systems . . . . . . . . . . . . . . . . . . 127
B.2 Common Measurement Errors . . . . . . . . . . . . . . . . . . . . . . . . 128

136
List of Tables
1.1 Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2 Abbreviations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1 Design Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.2 Specifications of the Air Velocity Sensor, adapted from [11] . . . . . . . . 23
2.3 Specifications of the Temperature and RH Sensor, adapted from [14] . . . 26
2.4 Specifications of the PPF Sensor, adapted from [16] . . . . . . . . . . . . 27
2.5 Features of the Camera and included Transmitter, adapted from [17] . . 28
2.6 Characteristics of Linear Direct Drives and Ball Spindle Drives . . . . . . 34
2.7 Properties of Stepper and Servo Drives, adapted from [19] . . . . . . . . 35
2.8 Characteristics of the Smart Actuator SA-2-A.083-8-K-1-B/NRC3,
adapted from [24] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.9 Evaluation of Cables and Radio Transmission . . . . . . . . . . . . . . . 48
2.10 Evaluation of Separate and Multi-Functional Adapters . . . . . . . . . . 49

1373.1 Basic Motor Commands . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
3.2 Variables for the Calculation of Motion . . . . . . . . . . . . . . . . . . . 70
3.3 Motor Parameters for the Calculation of Motion . . . . . . . . . . . . . . 70
3.4 Features of the RF Transceiver, adapted from [28] . . . . . . . . . . . . . 73
3.5 Required Supply Voltage Levels . . . . . . . . . . . . . . . . . . . . . . . 74
3.6 Specification of Power Consumption . . . . . . . . . . . . . . . . . . . . . 74
3.7 Features of the Micro-Controller, adapted from [29] . . . . . . . . . . . . 79
3.8 Specification of Analog Voltage Signals . . . . . . . . . . . . . . . . . . . 80
3.9 Pogo-Pin Connector Assignments . . . . . . . . . . . . . . . . . . . . . . 81
5.1 Weight of the End-Effector and its Components . . . . . . . . . . . . . . 102
5.2 Evaluation of Design Performance . . . . . . . . . . . . . . . . . . . . . . 107
5.3 Evaluation of the Actuator . . . . . . . . . . . . . . . . . . . . . . . . . . 108
5.4 Evaluation of the Camera System . . . . . . . . . . . . . . . . . . . . . . 109
5.5 Evaluation of the Power Supply Board . . . . . . . . . . . . . . . . . . . 110
5.6 Evaluation of the Mechanical Connections . . . . . . . . . . . . . . . . . 110
5.7 Evaluation of the Pogo-Pin Connector . . . . . . . . . . . . . . . . . . . 111
5.8 Evaluation of the Sensors . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
5.9 Evaluation of the Data Acquisition Board . . . . . . . . . . . . . . . . . 112

1385.10 Evaluation of the Transceiver System . . . . . . . . . . . . . . . . . . . . 113
5.11 Evaluation of Software Performance . . . . . . . . . . . . . . . . . . . . . 114
B.1 Definition of Keywords in Metrology . . . . . . . . . . . . . . . . . . . . 127

139
Bibliography
[1] NASA Johnson Space Center Advanced Life Support Homepage. Retrieved
from
http : //advlifesupport.jsc.nasa.gov/
[2] D. J. Barta, J. M. Castillo, R. E. Fortson: The Biomass Production Sys-
tem for the Bioregenerative Planetary Life Support Systems Test Complex: Prelim-
inary Designs and Considerations. SAE Technical Paper Series 1999− 01− 2188
[3] D. J. Barta Personal Communication via E-Mail. Johnson Space Center, Septem-
ber 28, 2000
[4] W. Zhou Personal Communication via E-Mail. Wisconsin Center for Space Au-
tomation and Robotics, October 12, 2000
[5] J. J. Craig Introduction to Robotics: Mechanics & Control. Addison - Wesley
Publishing Company 1986
[6] VDI-Richtlinie 2220 - 2225 Methodik zum Entwickeln und Konstruieren tech-
nischer Systeme und Produkte Dusseldorf, VDI Verlag, 1993
[7] W. Beitz, K.-H. Grote Dubbel - Taschenbuch fur den Maschinenbau, 19. Au-
flage. Springer Verlag, Berlin, Heidelberg, New York, 1997.

140[8] H. R. Taylor Data Acquisition for Sensor Systems. Chapman & Hall, First Edi-
tion 1997
[9] efunda Hot-Wire Anemometry: Introduction. Retrieved from http :
//www.efunda.com
[10] JLC International Engineering Information. Retrieved from
http : //www.jlcinternational.com
[11] Cambridge Accusense, Inc. AVS-1000 Datasheet. Retrieved from
http : //www.accusense.com
[12] J.G. Bollinger, N.A. Duffie Computer Control of Machines and Processes.
Addison-Wesley, 1989
[13] H. Stetter Messtechnik an Maschinen und Anlagen. B.G. Teubner Stuttgart
1992
[14] Vaisala Humitter-USA Datasheet. Retrieved from
http : //www.vaisala.com
[15] Meteo-Technology Humidity. Retrieved from
http : //www.meteo− technology.com
[16] Apogee Instruments, Inc. Datasheet Retrieved from
http : //www.apogee− inst.com
[17] Supercircuits Datasheets Retrieved from
http : //www.supercircuits.com/
[18] U. Heisel Werkzeugmaschinen und Produktionssysteme Course Manual, Institut
fur Werkzeugmaschinen, Universitat Stuttgart 1999

141[19] W. Schinkothe, R. Hartramph Aktorik in der Feinwerktechnik Course Man-
ual, Institut fur Konstruktion und Fertigung in der Feinwerktechnik, Universitat
Stuttgart 1997
[20] G.A.S. Linear Direct Drive LD 125 Datasheet Retrieved from
http : //www.g− a− s.de
[21] Bosch Rexroth AG Products and Service Retrieved from
http : //www.rexroth.com
[22] Infrared Data Association Infrared Data Communications with IrDA Re-
trieved from http : //www.irda.org
[23] Ultramotion LLC Datasheet Smart Actuator Retrieved from
http : //www.ultramotion.com
[24] Animatics SmartMotor User’s Manual.
[25] QA Technologies Co., Inc Datasheets Retrieved from
http : //www.qatech.com
[26] McMaster-Carr Datasheets Retrieved from
http : //www.mcmaster.com/
[27] Ultramotion LLC Instructions and Operating Limitations Smart Actuator
[28] ABACOM Technologies Intelligent FM Transceiver Module Datasheet Re-
trieved from http : //www.abacom− tech.com
[29] Atmel Corporation AVR Retrieved from http : //www.atmel.com
[30] H.M. Deitel, P.J. Deitel C How to Program, third edition. Prentice Hall, 2001.
[31] National Instruments LabWindows/CVI Manual. National Instruments, 1999.