Embed Size (px)
Citation preview

123
Design of an unmanned aerial vehicle (UAV) for measuring greenhouse gases
Diseño de un vehículo aéreo no tripulado (UAV) para medición de gases de efecto invernadero
Pedro Jiménez1, Juan Hernández2, Jorge Silva3 [email protected], [email protected], [email protected]
Universidad de San Buenaventura Bogotá, Colombia
Artículo de investigación
Abstract
At this moment, Colombia does not have a wide knowledge about pollution levels that have some geographical zones like Aburra Valley and tropical savannas. Industrial growth and development that have these zones has led to announce alarms by pollution in Medellin (Aburra Valley) and tropical savannas by the frequent fires, producing great concern to ambient level by the high level of particulate matter found and poor control for atmospheric warning. The lack of an unmanned aerial vehicle (UAV) for atmospheric data measuring will complicate the labor of data acquisition. The aim of this research is the development of an UAV, to obtain data like: temperature, carbon dioxide quantities, carbon monoxide, nitrous oxide, methane, ozone, among others, which will be used to update the mathematician models that work to know the greenhouse gas behavior. The aircraft must be built to accomplish some requirements that stand out like: 1 hour of endurance, 1 km of service ceiling and 1 kg approximately of weight of the equipment of atmospheric measuring, in addition, it is important stand out that the aircraft must be propeller powered and motorized by electrical energy.
Keywords: Unmanned aerial vehicle (UAV), Aburra valley, tropical savannas, particulate matter, atmospheric data acquisition. Resumen
En la actualidad, Colombia no cuenta con un conocimiento amplio sobre el nivel de contaminación que posee algunas zonas geográficas como el Valle de Aburrá y las sabanas tropicales. El gran crecimiento y desarrollo industrial que han tenido estas zonas, ha llevado a que se emitan alertas por contaminación específicamente en Medellín (Valle de Aburrá) y en las sabanas tropicales por los frecuentes incendios presentados, generando gran preocupación a nivel ambiental por los altos niveles de material particulado y el poco control que se tiene de los mismos. La ausencia de un vehículo aéreo no tripulado (UAV) para la medición de datos atmosféricos hace complicada la labor de recolección de datos. El propósito de esta investigación es el desarrollo de un UAV, el cual permita obtener datos como: temperatura, cantidades de dióxido de carbono, monóxido de carbono, óxido nitroso, metano, ozono, entre otros, los cuales serán utilizados para actualizar los modelos matemáticos que se emplean para conocer el comportamiento de los gases de invernadero. La aeronave debe ser construida para cumplir ciertos requerimientos en los que sobresale; autonomía de 1 hora, techo de servicio de 1 km y carga del equipo de medición atmosférica de aproximadamente 1 kg, anexo a lo anterior es importante resaltar que la aeronave debe ser propulsada y energizada por medio de energía eléctrica.
Palabras clave: UAV, Valle de Aburrá, sabanas tropicales, material particulado, recolección de datos atmosféricos.
© 2017. IAI All rights reserved
Actas de Ingeniería Volumen 3, pp. 123-132, 2017
http://fundacioniai.org/actas

124
1. Introducción
A nivel ambiental es de gran importancia considerar el efecto que tiene el aumento de contaminación sobre la población colombiana, destacando ciudades como Medellín. Actualmente no existe una herramienta eficiente que pueda medir de manera precisa el material particulado sobre determinadas zonas y a diferentes alturas, es por ello que el desarrollo de un vehículo aéreo no tripulado ejercerá un papel importante en el transporte de un sistema de medición atmosférica que pueda llevar a cabo tal fin. Los sistemas aéreos no tripulados presentan ventajas importantes como el costo de operación, versatilidad en transporte, flexibilidad de diseño y pequeñas dimensiones, que lo convierten en un vehículo o medio de transporte ideal para realizar este tipo de misiones. Antes de abordar el diseño es preciso mencionar la plataforma y el sistema de medición que se han empleado para el presente estudio.
El ADAS-X1 (Figura 1) es una aeronave usada para labores de investigación relacionadas a medición de parámetros atmosféricos. En esta plataforma se han desarrollado los primeros avances de medición de material particulado en zonas como Bogotá D.C. y Medellín. Esta aeronave hace parte de la fase inicial de este estudio y será un referente teórico-experimental para el diseño de la nueva plataforma que se espera que tenga mejores características de rendimiento, aerodinámica y resistencia estructural, traducidos en mayor tiempo de vuelo, capacidad de carga y menor peso al despegue.
Figura 1. Aeronave ADAS X-1 (Atmospheric Data Adquisition
System)
La aeronave ADAS-X1 es de configuración ala fija,
empenaje convencional y motor tipo tractor, además de eso requiere de una pista para el despegue y aterrizaje. Debido a su configuración con el piloto automático, puede ser pilotada de manera manual y automática, cubriendo una amplia área de medición. Posee un motor eléctrico tipo brushless y obtiene la energía de una batería LiPo de 10000 mAh. La estructura interna permite soportar el peso de la carga paga (sistema de medición atmosférica) a través de un módulo removible. El principal material de la aeronave es madera de balso, sin embargo, la estructura externa de las alas es reforzada en una sección con fibra de carbono, por lo tanto, el avión puede ser transportado de manera fácil y emplearse en terrenos difíciles. La aeronave cuenta con un piloto automático conocido como 3DR Pixhawk Mini y el hardware incluye sensores de presión barométrica para la determinación de altitud, giróscopos, acelerómetros, magnetómetros, sistema de posicionamiento global (GPS) y sensores de voltaje para medir el estado de la batería [1].
Por otro lado, el sistema de medición (Figura 2) que se emplea es compacto y liviano, y se compone principalmente de múltiples sensores especializados en la medición de material particulado, instalados de manera conjunta (cooperación entre 3 universidades) y funcionando de forma independiente, además de material particulado se puede saber parámetros como altura, temperatura, humedad y radiación UV. La estructura donde se soportan todos los sensores consta de una lámina en fibra de carbono con núcleo en poliuretano (divinicell), esto tiene como ventaja un menor peso y mayor resistencia estructural, debido a las propiedades que ofrece la fibra de carbono [9]. El desarrollo del sistema fue un proyecto que surgió de la unificación de esfuerzos entre la Universidad de Medellín y la Universidad de San Buenaventura, Medellín. En la Figura 3 se muestra el conjunto aeronave-equipo de medición, los cuales conjugan el sistema empleado para medir contaminantes.
Figura 2. Sistema de medición atmosférica desarrollado y
patentado por la Universidad de San Buenaventura Medellín y la Universidad de Medellín
Figura 3. Sistema de medición montado en la aeronave ADAS
X-1
La aeronave ADAS-X1, como ya se mencionó es una plataforma que se ha empleado para aerotransportar el sistema de medición y obtener algunos valores iniciales de contaminantes y rendimiento de la aeronave, estos datos se usarán para el desarrollo del nuevo UAV llamado ADAS-X2. En la parte de diseño de la nueva aeronave, se comienza estableciendo una serie de especificaciones y requerimientos como paso inicial (diseño conceptual). En general se hace una estimación inicial de la forma, tamaño, peso y rendimiento, a través de bocetos y cálculos sencillos, sin embargo, la geometría siempre está sometida a ser cambiada a medida que se continúe con el diseño de la aeronave hasta llegar a un punto neutro que cumpla con las características y requerimientos establecidos inicialmente.
Un resultado o producto común obtenido del diseño conceptual, es la elaboración de un dibujo o boceto del objeto de análisis, para este caso en específico sería el UAV en su fase inicial con la configuración determinada de alas, fuselaje y empenaje. La fase de diseño conceptual determina aspectos fundamentales como la forma de las alas, su ubicación, su ángulo de flechamiento y diedro, la forma del fuselaje, la forma de los estabilizadores vertical y horizontal, con sus respectivas dimensiones [2].

125
2. Análisis de requerimientos Dentro del marco conceptual del vehículo aéreo no
tripulado, se deben establecer como primera medida parámetros iniciales que permitirán direccionar el proceso de diseño hasta la finalización del mismo. A continuación, se presentan los requerimientos planteados por la Universidad de San Buenaventura Medellín y la Universidad de Medellín (Tabla 1).
Tabla 1. Requerimientos para cumplir con la misión
Parámetro Valor Unidad Autonomía 65 min Carga Paga 1 Kgf Techo de Servicio 1 Km
En la Tabla 1 se muestran los requerimientos más
importantes para el cumplimiento de la misión, sin embargo, se deben considerar otros que complementan parte del diseño de la aeronave a nivel de rendimiento, los cuales se pueden evidenciar en la Tabla 2.
Tabla 2. Requerimientos para el diseño
Parámetro Valor Unidad Rango 50 Km Distancia de Despegue 250 m Distancia de Aterrizaje 200 m
Velocidad de Pérdida 13 m/s Velocidad de Crucero 20 m/s Velocidad Máxima 30 m/s Tasa de Ascenso 3 m/s Tasa de Descenso -2 m/s
Máximo Factor de Carga 3,8 -
2.1 Autonomía
Es un parámetro que describe el máximo recorrido que se puede lograr al agotar por completo toda reserva energética y se expresa en unidad temporal [2]. Para este caso de estudio la autonomía requerida debe estar en un valor de 60 min, para que se lleve a cabo el perfil de misión y por ende la medición de datos atmosféricos de forma verás, sin embargo el tiempo de vuelo debe ser de por lo menos 65 min (Tabla 1), debido a que se debe tener un margen de seguridad frente a cualquier evento inesperado, por ello es un valor restrictivo que ofrece seguridad y garantiza el cumplimiento de la misión, de esta forma el diseño se basará considerando un tiempo mínimo de 65 min.
2.2 Carga paga
Es aquella carga de la cual se obtiene algún beneficio al transportarla durante el vuelo [2]. En este caso, la carga paga que se debe transportar pesa como mínimo 1 Kg (Tabla 1), es decir, existe la posibilidad de que el peso y dimensiones cambien debido a materiales de construcción, ya que la caja donde se alberga el conjunto de medición está en constante modificación (Figura 2).
2.3 Techo de servicio
Es la altura máxima de operación que alcanza el
vehículo aéreo no tripulado [3]. En este caso, el vehículo aéreo no tripulado debe alcanzar una altura máxima de 1 Km (Tabla 1), durante la cual es necesario medir agentes contaminantes a través del sistema de medición en
vuelos de columna de aire y en Loiter. La altura seleccionada como punto máximo de ascenso está determinada por los requerimientos propios de la medición en la tropósfera baja.
2.4 Rango
El rango es la distancia máxima de vuelo a la cual se
somete una aeronave [3]. Para el caso de diseño, se estima que el vehículo aéreo no tripulado alcance una distancia entre 50 Km a 90 Km (Tabla 2), en la cual se desarrolle todo el perfil de misión. En el rango se contempla distancias de despegue y aterrizaje, ascenso y descenso, crucero y hasta el perímetro de la trayectoria de medición en loiter y columna de aire. El valor de 50 km es seleccionado como valor aproximado del total de distancia recorrida por la aeronave, sin embargo, es probable que se incremente el valor por algún evento inesperado, por esta razón en el diseño se contempla un alcance mayor de hasta 90 km.
2.5 Distancia de despegue
Se entiende como la distancia requerida para que la
aeronave inicie su carrera de despegue hasta que el tren principal o la superficie en contacto con el suelo deje la tierra y se alce en vuelo [3]. Para el caso abordado del vehículo aéreo no tripulado, este debe alcanzar la suficiente velocidad para despegar en una distancia menor a 250 m con el máximo peso al despegue (Tabla 2). Se contempla, además, la posibilidad de despegar en pistas no acondicionadas o preparadas para tal fin, es por ello que se requiere la menor distancia posible para lograr el despegue. El valor asumido es considerado debido a que las pistas con las que se cuenta en los lugares de medición generalmente no son preparadas y el espacio disponible oscila en un valor promedio de 200 m a 300 m.
2.6 Distancia de aterrizaje
Se entiende como la distancia requerida para que la
aeronave detenga su carrera de aproximación desde que el tren principal entre en contacto con el suelo hasta que se detenga completamente [3]. Para el caso de estudio, la plataforma aérea debe detenerse en la menor distancia posible, un valor inferior a 200 m sobre la pista preparada y la no preparada (Tabla 2), debido a la limitación de espacio en las zonas de medición como se mencionaba anteriormente.
2.7 Velocidad de pérdida
Es la velocidad mínima de vuelo que no debe
reducirse, debido a que el flujo de aire sobre la superficie del ala comienza a separarse y genera una pérdida de sustentación progresiva [2, 3]. En el caso de estudio, el vehículo aéreo no tripulado no debe disminuir la velocidad por debajo de 13 m/s (Tabla 2). Esta velocidad es crítica y lo recomendable es no operar bajo este valor durante el desarrollo del perfil de misión (o durante la toma de datos atmosféricos), sin embargo, cabe aclarar que este valor de velocidad se asume debido a vuelos experimentales realizados con el ADAS-X1 (Figura 1).

126
2.8 Velocidad de crucero Este tipo de velocidad se caracteriza por ser uniforme
o constante a lo largo del tiempo (es lo ideal), este valor estable es debido a que los parámetros de operación no sufren ningún cambio durante un trayecto considerable en vuelo [3]. En este caso se requiere que el vehículo aéreo no tripulado alcance una velocidad de crucero entre 16 m/s a 20 m/s. Es importante que esta velocidad no sufra cambios abruptos de magnitud, de esta forma se garantiza una operación estable en vuelo y una toma de datos precisa. El rango que se aborda de velocidades está basado en los vuelos experimentales del ADAS-X1 y se asume un valor de 20 m/s porque fue el valor más adecuado para realizar la medición (Tabla 2).
2.9 Velocidad máxima
Es la velocidad límite (máxima) durante el vuelo, al
superarla se compromete la integridad estructural y se aumenta la probabilidad de perder el control [2]. Para el caso del vehículo aéreo no tripulado se requiere que la velocidad máxima no supere 30 m/s [4], ya que puede influir de manera negativa a todo el conjunto de estructura y generar mediciones erróneas por parte del sistema de medición, sin mencionar la seguridad de operación la cual debe ser garantizada todo el tiempo (Tabla 2).
2.10 Tasa de ascenso
Es un valor que permite identificar la velocidad a la
cual el vehículo aéreo no tripulado aumenta su altitud [3]. En el caso de estudio se requiere que la tasa de ascenso oscile entre 3 m/s a 5 m/s. Es importante que este ascenso se realice lo más eficiente posible, debido a que se necesita que ascienda rápido pero que no
consuma mucha energía de la batería. El valor de 3 m/s se asume debido a vuelos experimentales realizados con el ADAS-X1 (Tabla 2).
2.11 Tasa de descenso
Es un valor que permite identificar la velocidad a la
cual el vehículo aéreo no tripulado disminuye su altitud [3]. En el caso de estudio se requiere que la tasa de descenso oscile entre -1.5 m/s a -3 m/s. Es importante que el descenso se realice bajo un tiempo considerable, para que durante el Loiter en descenso se tome la cantidad restante de datos referentes a los parámetros atmosféricos. El valor de -2 m/s se asume debido a vuelos experimentales realizados con el ADAS-X1 (Tabla 2).
2.12 Máximo factor de carga
Es un parámetro que varía conforme cambia la velocidad del vehículo aéreo no tripulado, se manifiesta a través de un esfuerzo sobre la estructura, en donde el peso bruto se incrementa en función de este factor [2]. Para el caso del vehículo no tripulado este factor de carga máximo no debe superar 3,8 [4], debido a que el sistema de medición y la estructura del avión se pueden ver afectadas con un factor de carga mayor (ver Tabla 2).
2.13 Análisis de semejanza
Después de evaluar y analizar los requerimientos
para el desarrollo del diseño del ADAS-X2, el siguiente paso será buscar aviones no tripulados de características similares, para ello se realiza una investigación que tiene como fin encontrar parámetros como; el peso al despegue, peso vacío y peso de la carga paga, los resultados obtenidos se muestran en la Tabla 3.
Tabla 3. Investigación de aeronaves similares
Avión Peso al despegue (Kg) Peso carga paga (kg) Peso vacío (Kg) We/Wto Stardust II R13 3,7 0,4 1,9 0,51
Bramor RTK 3,8 1 1,8 0,47 EVE-2000 4,6 0,9 2,5 0,54 Hugin H2M2-V 5 1 2,7 0,54 MTD-1800 UAV 5,3 0,8 2,9 0,55 Zephyr UAV 6 1,5 3,5 0,58 Hugin II Electric Powered UAV 9 2,5 5,3 0,59 S-UAV Swallow Electric 9 2 5,4 0,6 DT-26M Ultra Long Range 11 4 6,7 0,61
E-300 Viewer ELIMCO 15 4 8,4 0,56
De la Tabla 3 se pueden determinar algunos parámetros iniciales, como por ejemplo el peso al despegue y la relación del peso vacío y el peso al despegue (We/Wto). Es importante resaltar que son estimaciones iniciales y que el valor exacto de cada parámetro puede variar durante el proceso de diseño. Partiendo de esta Tabla, se puede determinar la relación de peso vacío de la aeronave (We/Wto) por medio de una regresión lineal con pendiente igual a cero y tomando como valor el punto de corte con el eje “Y” como se muestra en la siguiente figura. Este parámetro es muy importante, debido a que permite calcular el peso de la estructura y los equipos que no hacen parte de la carga paga de la aeronave.
Figura 4. Fracción de peso vacío
Después de hacer la regresión lineal con los datos de la Tabla 3, el valor obtenido para la fracción de peso vacío se logra con la ecuación (1).
We
Wto= 0,58 (1)

127
2.14 Estimación de peso El peso al despegue de la aeronave está conformado
principalmente por el peso de la carga paga, el peso vacío y el peso de la batería, el cual no varía (ecuación (2)). El peso vacío incluye la estructura, los motores, el tren de aterrizaje, los equipos fijos, los equipos de aviónica y todo lo demás que no es considerado como parte de la carga [4, 5]. De esta forma se tiene la ecuación (3) que expresa el peso vacío.
Wto = Wcarga paga + Wvacío + Wbatería (2)
We = Wvacío = Westructura + Wmotores +Wtren de aterrizaje + Waviónica (3)
El peso de la carga paga se conoce a partir de los requerimientos de la misión (Tabla 1). Las incógnitas de la ecuación serán entonces el peso vacío y el peso de la batería. Para simplificar un poco los cálculos, las dos incógnitas mencionadas se pueden expresar como fracciones del peso total al despegue (ecuación (4)).
Wto =Wcarga paga
1−Wbatería
Wto−
WeWto
(4)
La ecuación (4) permite calcular de forma más certera el peso al despegue, sin embargo, aún no se ha determinado la fracción másica de la batería, para ello se emplea la ecuación (5) [5].
Wbat
Wto= MFbat =
E g V
ESpec ∏ η ηbat fUsable L D⁄ (5)
En donde, 𝐸 es la autonomía de vuelo, 𝑔 es la gravedad, 𝑉 es la velocidad de crucero de la aeronave, 𝐸𝑆𝑝𝑒𝑐 es la energía específica de la batería, ∏ 𝜂 es el
producto de las eficiencias del sistema de propulsión, 𝜂𝑏𝑎𝑡 es la eficiencia de la batería, 𝑓𝑈𝑠𝑎𝑏𝑙𝑒 es un factor de profundidad de descarga, el cual relaciona la energía utilizable y la energía almacenada total de la batería, y por último 𝐿 𝐷⁄ que es la relación de sustentación y arrastre (Lift-to-drag ratio). Al resolver la ecuación 5 se obtiene un valor de fracción másica de la batería, representado en la ecuación (6).
Wbat
Wto= 0,26 (6)
Conociendo ahora todas las variables, ya es posible obtener una primera estimación del peso al despegue de la aeronave utilizando la ecuación (4).
Wto = 6,25 Kg
Ahora, con este dato y utilizando la fracción de peso vacío (ecuación (1)), se puede calcular el peso vacío de la aeronave para lograr una primera estimación del mismo con la ecuación (7).
We = 0,58 Wto (7)
We = 0,58 (6,25 Kg)
We = 3,62 Kg
De igual forma, empleando la fracción másica de la batería (ecuación (6)), se puede calcular el peso en baterías que se podría llevar en la aeronave con la ecuación (8).
Wbat = 0,26 Wto (8)
Wbat = 0,26 (6,25 Kg)
Wbat = 1,62 Kg
En la Figura 5 se muestra la distribución final de pesos clasificándolos en varias categorías.
Figura 5. Clasificación de pesos de la aeronave ADAS-X2
2.15 Diagrama de restricciones
Para poder realizar el diagrama de restricciones, primero se tienen en cuenta algunos parámetros básicos del avión, estos parámetros se listan en la Tabla 4.
Tabla 4. Datos para el diagrama de restricciones
Datos Valor CL máximo con flaps retraídos 1,6 L/D 20 Pendiente de CL vs delta del flap 0,0346 Masa al despegue (Kg) 6,25 Cuerda (m) 0,433 Swet/S 3,3 Altura de obstáculo según regulaciones (m) 15,24 Sg (m) 100 j 1,15 N (segundos) 1,2 μ 0,3 Factor de carga máximo (n) 3,8 Velocidad de pérdida (m/s) 13 Velocidad de crucero (m/s) 20 Velocidad máxima (m/s) 30 Velocidad del giro sostenido (m/s) 25 Tasa de ascenso máxima estimada (m/s) 3 Ángulo de ascenso (grados) 10
De la anterior tabla se emplean los datos mostrados,
como datos de entrada para graficar el diagrama de restricciones (Figura 6).
Figura 6. Diagrama de restricciones
El objetivo del diagrama es delimitar una zona de
diseño, en la cual se pueden variar parámetros de la carga alar (W/S) y la relación empuje-peso (T/W) sin dejar de satisfacer los requerimientos de diseño [4].
2.16 Geometría de la aeronave
Para la realización de la geometría inicial de la
aeronave ADAS-X2, se comenzó con la elaboración de bocetos como primera aproximación al diseño de la misma. Dentro de los bocetos mencionados (Figura 7) se establece la configuración inicial que se esperaba de la
128
aeronave, sin embargo, durante el proceso de diseño ha sufrido varias modificaciones que han permitido avanzar de manera favorable hasta un punto final de diseño. A
continuación, se muestra todo el levantamiento geométrico de la aeronave durante este proceso de diseño.
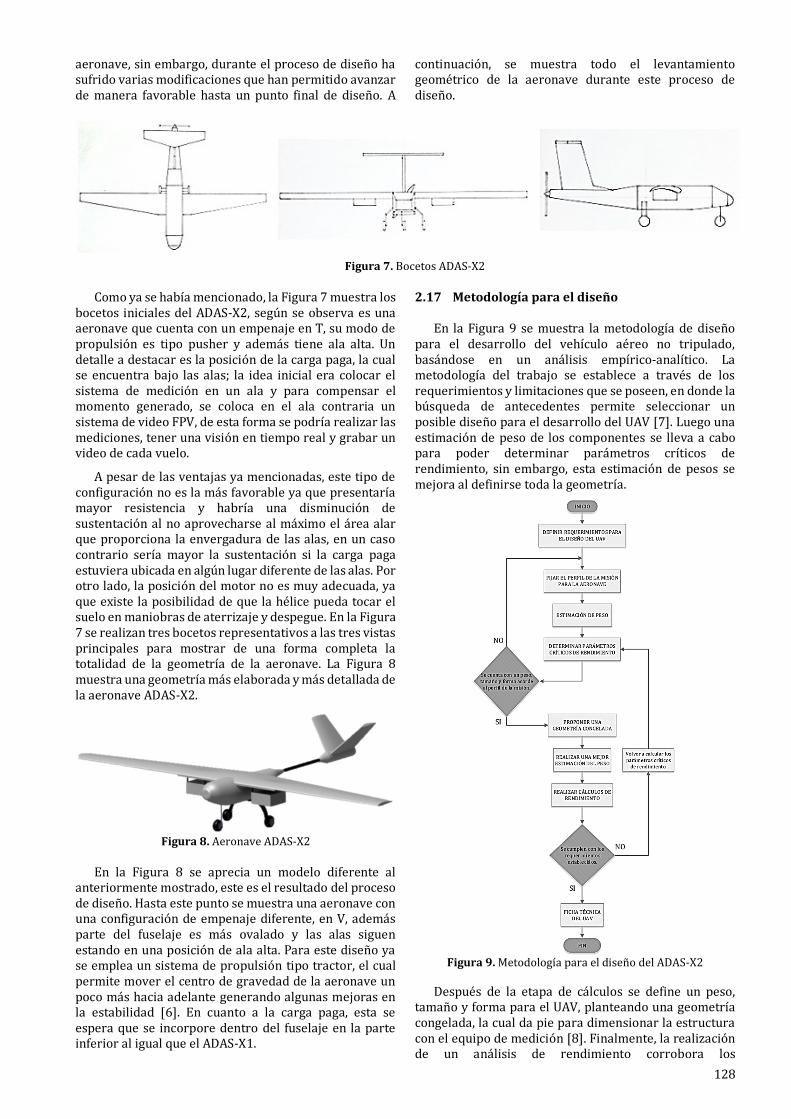
Figura 7. Bocetos ADAS-X2
Como ya se había mencionado, la Figura 7 muestra los bocetos iniciales del ADAS-X2, según se observa es una aeronave que cuenta con un empenaje en T, su modo de propulsión es tipo pusher y además tiene ala alta. Un detalle a destacar es la posición de la carga paga, la cual se encuentra bajo las alas; la idea inicial era colocar el sistema de medición en un ala y para compensar el momento generado, se coloca en el ala contraria un sistema de video FPV, de esta forma se podría realizar las mediciones, tener una visión en tiempo real y grabar un video de cada vuelo.
A pesar de las ventajas ya mencionadas, este tipo de configuración no es la más favorable ya que presentaría mayor resistencia y habría una disminución de sustentación al no aprovecharse al máximo el área alar que proporciona la envergadura de las alas, en un caso contrario sería mayor la sustentación si la carga paga estuviera ubicada en algún lugar diferente de las alas. Por otro lado, la posición del motor no es muy adecuada, ya que existe la posibilidad de que la hélice pueda tocar el suelo en maniobras de aterrizaje y despegue. En la Figura 7 se realizan tres bocetos representativos a las tres vistas principales para mostrar de una forma completa la totalidad de la geometría de la aeronave. La Figura 8 muestra una geometría más elaborada y más detallada de la aeronave ADAS-X2.
Figura 8. Aeronave ADAS-X2
En la Figura 8 se aprecia un modelo diferente al
anteriormente mostrado, este es el resultado del proceso de diseño. Hasta este punto se muestra una aeronave con una configuración de empenaje diferente, en V, además parte del fuselaje es más ovalado y las alas siguen estando en una posición de ala alta. Para este diseño ya se emplea un sistema de propulsión tipo tractor, el cual permite mover el centro de gravedad de la aeronave un poco más hacia adelante generando algunas mejoras en la estabilidad [6]. En cuanto a la carga paga, esta se espera que se incorpore dentro del fuselaje en la parte inferior al igual que el ADAS-X1.
2.17 Metodología para el diseño En la Figura 9 se muestra la metodología de diseño
para el desarrollo del vehículo aéreo no tripulado, basándose en un análisis empírico-analítico. La metodología del trabajo se establece a través de los requerimientos y limitaciones que se poseen, en donde la búsqueda de antecedentes permite seleccionar un posible diseño para el desarrollo del UAV [7]. Luego una estimación de peso de los componentes se lleva a cabo para poder determinar parámetros críticos de rendimiento, sin embargo, esta estimación de pesos se mejora al definirse toda la geometría.
Figura 9. Metodología para el diseño del ADAS-X2
Después de la etapa de cálculos se define un peso, tamaño y forma para el UAV, planteando una geometría congelada, la cual da pie para dimensionar la estructura con el equipo de medición [8]. Finalmente, la realización de un análisis de rendimiento corrobora los

129
requerimientos definidos desde el comienzo, por otro lado, la elaboración de una ficha técnica muestra las principales características diseñadas para el vehículo aéreo no tripulado. El incumplimiento de los requerimientos causa recálculo de parámetros críticos de rendimiento y replanteamiento de los ítems.
3. Prueba del ADAS X-1
A continuación, se hace una descripción del proceso experimental realizado con la aeronave ADAS-X1.
3.1 Lugar de estudio
Los vuelos experimentales con la aeronave no tripulada ADAS X1, son realizados en la vereda los Laureles del municipio de Tenjo, Cundinamarca en Colombia. La pista de vuelo se encuentra ubicada en las coordenadas 4º49’27.235’’N y 74º09’22.78’’O, las dimensiones de esta son: 300m de largo, 30m de ancho a una elevación de 2566m sobre el nivel del mar, suficientes para la operación de aeronaves no tripuladas de pequeñas dimensiones. El rumbo de la pista es de 314º y 134º respecto al polo magnético norte de la tierra. La temperatura promedio del lugar oscila entre los 10ºC a 15ºC, con velocidades de viento de 4 m/s con dirección predominante 300º con respecto al norte [1].
Figura 10. Pista de vuelo Tenjo
3.2 Determinación de parámetros Por medio de los vuelos de prueba se busca obtener
la telemetría, con el objetivo de determinar parámetros de:
Autonomía de la aeronave. Velocidad de pérdida. Velocidad crucero. Velocidad máxima. Tasa de ascenso. Tasa de descenso. Porcentaje de potencia. Consumo de batería.
3.3 Diseño plan de vuelo
El plan vuelo es diseñado con el fin de estandarizar los
vuelos experimentales del ADAS X1, para comparar los parámetros de rendimiento, desempeño del equipo de medición atmosférica en vuelo, con los resultados de la aeronave ADAS X2. Para generar el plan de vuelo se hace uso del software Mission Planner, esté es un programa especializado en diseñar misiones para vehículos aéreos no tripulados, en el que es posible programar la ruta deseada mediante el uso de waypoints (comandos pre-establecidos), para especificar el perfil de vuelo del UAV.
El plan de vuelo diseñado consta de 4 waypoints, en la Tabla 5 se muestra los comandos utilizados y en la Figura 11 el plan de vuelo con la interfaz de Mission Planner. El primer waypoint hace referencia al despegue; aquí la aeronave debe llegar a una altura de 90 m con respecto al suelo, en el segundo debe realizar un loiter por giros; realizando dos giros de radio 100m, en el tercero debe ejecutar otro loiter; realizando dos giros de radio 120m y por último en el cuarto, debe efectuar un RTL para descender a una altura de 60m. Las coordenadas del centro de cada uno de los giros son mostradas en la Tabla 5.
Tabla 5. Comandos plan de vuelo
No. Comando Radius Lat Long Alt 1 TAKEOFF 0 0 0 90 2 LOITER TURNS 100 4º49’28.776’’N 74º09’15.804’’O 90 3 LOITER TURNS 120 4º49’27.012’’N 74º09’16.847’’O 90 4 RETURN TO LUNCH 0 0 0 60
Es importante resaltar que los modos de vuelo se desarrollan de la siguiente forma: inicialmente la aeronave es despegada en MANUAL, luego es configurada en AUTO para que desarrolle el plan de vuelo y por último cuando lo finalice, es configurada en MANUAL para aterrizar. También que la adquisición de datos se obtiene de manera más confiable cuando se realiza un patrón circular en comparación con otro.
Figura 11. Plan de vuelo experimental en Mission Planner
3.4 Preparación de la aeronave Para el desarrollo del vuelo es necesario someter a la
aeronave ADAS X1 a un chequeo para garantizar su condición de aeronavegabilidad, en la que es importante asegurar que la aeronave este correctamente balanceada, los sensores tomen mediciones coherentes y los componentes electrónicos estén bien conectados. El procedimiento de preparación es el siguiente:
1. Verificar integridad estructural. 2. Revisar torque de los tornillos de sujeción. 3. Conectar sistemas electrónicos. 4. Probar sistema propulsivo. 5. Realizar peso y balance. 6. Establecer conexión estación-aeronave. 7. Verificar transmisión de datos. 8. Cargar plan de vuelo.

130
3.5 Simulación post-vuelo
Después de haber realizado el vuelo, es posible mediante el software Google Earth observar la trayectoria que tuvo la aeronave. En la Figura 12 se muestra el vuelo realizado por el ADAS X1 con sus correspondientes perfiles de vuelo. El loiter 1 hace referencia a los giros con radio 100 m mientras que el loiter 2 a los giros con radio 120 m.
Figura 12. Visualización post-vuelo en Google Earth
3.6 Análisis de la telemetría
Antes de realizar el análisis de telemetría es necesario
extraer las variables de interés de estudio y separarlas de acuerdo a su frecuencia de muestreo, esto para poder generar un orden secuencial en segundos iniciando desde cero hasta el final de la misión. El análisis realizado se muestra a continuación [7].
Altura relativa vs tiempo. En la Figura 13 se muestra la gráfica obtenida de altura relativa vs tiempo. De esta gráfica, se infiere que durante el despegue hasta el ascenso a 90m de altura a la aeronave le tomo 50s, el loiter donde realizó el patrón de vuelo circular para la toma de datos duró 200s y que el descenso hasta el aterrizaje fue de 60s, con lo cual se determina que el vuelo duro 310s.
Figura 13. Altura relativa vs Tiempo
Batería restante vs tiempo. Con el análisis de está
gráfica mostrada en la Figura 14, se determina el porcentaje con el que la aeronave aterrizó. También, como el comportamiento de la gráfica tiende a ser lineal desde que comienza el despegue hasta que termina el loiter, estimar el tiempo con el que la aeronave aterrizaría con un 20% (margen limite) de batería restante, ya que durante el aterrizaje y descenso el consumo de batería es mínimo.
Figura 14. Batería Restante vs Tiempo
De esta gráfica se determinó que la aeronave aterrizó con el 39%, es decir que durante el vuelo se consumió un 61%, siendo el perfil de vuelo en loiter donde se presentó un mayor consumo con un 45%, ascenso 12% y descenso 4%. Para haber aterrizado con un 20% y asumiendo que el vuelo se realiza bajo las mismas condiciones de vuelo, la aeronave podría haber volado 60s más, estimando que por cada min de vuelo se consume un 13% de batería.
Corriente consumida vs Tiempo. La gráfica mostrada en la Figura 15, está muy relacionada con la gráfica de batería restante, ya que la corriente consumida está directamente ligada con la batería. La batería utilizada para el vuelo tiene una capacidad de 10000 mAh. De esta gráfica se infiere que durante despegue-ascenso se consumen 1278 mAh, loiter 4417 mAh y descenso-aterrizaje 311 mAh, es decir que durante todo el vuelo el consumo fue de 6006 mAh.
Figura 15. Corriente consumida vs Tiempo
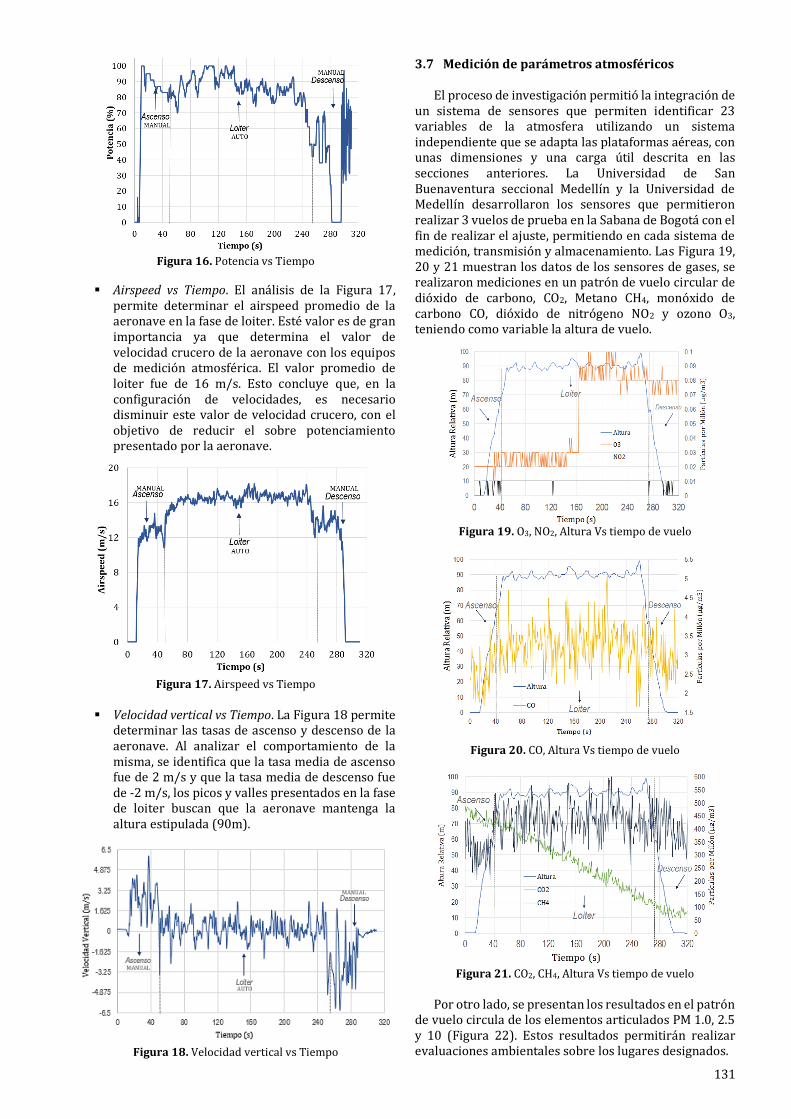
Potencia vs Tiempo. La gráfica mostrada en la
Figura 16, permite determinar el porcentaje de potencia con el que se encontraba la aeronave en cada una de los perfiles de vuelo. El porcentaje de potencia durante despegue-ascenso fue de un promedio de 77%, loiter de 86% y descenso-aterrizaje de 37%, indicando que durante la fase de loiter la aeronave se encontraba sobre potenciada, debido a fuertes corrientes de aire que se encontraban en el lugar el día del vuelo. Es importante resaltar que la aeronave debe realizar de manera adecuada el patrón de vuelo, razón por la cual se evidencia el sistema sobre-potenciado, ya que se debe compensar la velocidad para no entrar en pérdida.
131
Figura 16. Potencia vs Tiempo
Airspeed vs Tiempo. El análisis de la Figura 17, permite determinar el airspeed promedio de la aeronave en la fase de loiter. Esté valor es de gran importancia ya que determina el valor de velocidad crucero de la aeronave con los equipos de medición atmosférica. El valor promedio de loiter fue de 16 m/s. Esto concluye que, en la configuración de velocidades, es necesario disminuir este valor de velocidad crucero, con el objetivo de reducir el sobre potenciamiento presentado por la aeronave.
Figura 17. Airspeed vs Tiempo
Velocidad vertical vs Tiempo. La Figura 18 permite
determinar las tasas de ascenso y descenso de la aeronave. Al analizar el comportamiento de la misma, se identifica que la tasa media de ascenso fue de 2 m/s y que la tasa media de descenso fue de -2 m/s, los picos y valles presentados en la fase de loiter buscan que la aeronave mantenga la altura estipulada (90m).
Figura 18. Velocidad vertical vs Tiempo
3.7 Medición de parámetros atmosféricos
El proceso de investigación permitió la integración de un sistema de sensores que permiten identificar 23 variables de la atmosfera utilizando un sistema independiente que se adapta las plataformas aéreas, con unas dimensiones y una carga útil descrita en las secciones anteriores. La Universidad de San Buenaventura seccional Medellín y la Universidad de Medellín desarrollaron los sensores que permitieron realizar 3 vuelos de prueba en la Sabana de Bogotá con el fin de realizar el ajuste, permitiendo en cada sistema de medición, transmisión y almacenamiento. Las Figura 19, 20 y 21 muestran los datos de los sensores de gases, se realizaron mediciones en un patrón de vuelo circular de dióxido de carbono, CO2, Metano CH4, monóxido de carbono CO, dióxido de nitrógeno NO2 y ozono O3, teniendo como variable la altura de vuelo.
Figura 19. O3, NO2, Altura Vs tiempo de vuelo
Figura 20. CO, Altura Vs tiempo de vuelo
Figura 21. CO2, CH4, Altura Vs tiempo de vuelo
Por otro lado, se presentan los resultados en el patrón
de vuelo circula de los elementos articulados PM 1.0, 2.5 y 10 (Figura 22). Estos resultados permitirán realizar evaluaciones ambientales sobre los lugares designados.

132
Figura 22. PM 1.0, PM 2.5, PM10, Altura Vs tiempo de vuelo
4. Conclusiones El sistema ADAS X1, ha sido una valiosa herramienta
de validación y prueba del sistema de medición atmosférica, obteniendo datos de telemetría después de 6 vuelos en alturas como Bogotá D.C, Rionegro Antioquia, Medellín, Antioquia y Cumaral, Meta. Los datos registrados han logrado establecer parámetros de rendimiento requerido para la etapa de siseo conceptual del ADAS X2. La aeronave ADAS X1, es capaz de realizar vuelos e hasta 14min, con un ascenso de 3m/s con diferentes patrones de vuelo.
Además, la primera fase ADAS X1, fue desarrollada para calibrar sistemas automáticos de control de vuelo y para evaluar las capacidades del Sistema No Tripulado para estudios de contaminación. La aeronave desarrollo planes de vuelo previstos en la configuración del diseño, con una buena cualidad de manejo a lo largo de toda la gama de velocidades, excelente fiabilidad del motor eléctrico, bajos niveles de vibraciones y buen comportamiento de navegación automática.
La aeronave fue capaz de despegar de pistas de césped, caminos pavimentados en menos de 45 metros a una altitud de 3.200 m.s.n.m. También, se comprobó el peso de la carga útil con 960gr de equipo adicional. Se sugiere reducir el peso de los sensores utilizando pequeñas placas electrónicas y optimizar el caso de la carga útil. Los datos suministrados en tiempo real por el sistema de control del piloto automático demostraron que se cumplieron, tales como la velocidad de perdida, la velocidad máxima, el alcance, la resistencia, el techo operativo y la distancia de despegue y aterrizaje. También se encontraron sendas circulares de vuelo de 1,5 km por encima del suelo, para hacer mediciones de columna de aire. La resistencia al vuelo del UAV fue una tarea muy compleja debido a las limitaciones de rendimiento en un modelo de entrenador. El tiempo máximo de vuelo fue de 14min. 1,5 horas puede ser posible para alcanzar la optimización de los parámetros críticos de rendimiento como la relación L / D, W / S, T / W, la selección del motor, la hélice y la más importante, la tecnología de la batería.
Maniobras exactas como volar a altitud constante, rumbo y velocidad, eran prácticamente posibles de lograr con un Ardupilot y Pixhawk. La información obtenida de los vuelos de prueba fue de gran valor para configurar los pilotos automáticos para el vuelo autónomo. La información obtenida de los sistemas de piloto automático se utilizó para formular un modelo dinámico de la aeronave para configurar ganancias PID
basadas en la identificación de sistemas. Se adquirió una valiosa experiencia en navegación y programación de planes de vuelo en los vuelos de prueba. Varias ganancias PID se sintonizaron experimentalmente mediante pruebas de vuelo y hardware en las simulaciones de HIL en el simulador AeroSim R/C, validado con identificación del sistema en MATLAB. Se calcularon diecisiete funciones de transferencia para la plataforma ADAS X1. La exhibición del ADAS X1 UAV en diferentes eventos locales ha suscitado el interés de las aplicaciones civiles en Colombia para desarrollar aún más la plataforma para muchas aplicaciones, así como la atención del público en general por los logros en el diseño, integración y configuración de UAVs con Capacidades locales. Agradecimientos
Este producto es resultado de un proceso de investigación en la Universidad de San Buenaventura, sede Bogotá D.C., Colombia. Fue posible gracias al gran trabajo de investigación de estudiantes, docentes y egresados del programa de Ingeniería Aeronáutica, que han sido el eje principal del desarrollo de este proyecto de investigación, a través de proyectos de grado enfocados al desarrollo de vehículos aéreos no tripulados. En primer lugar, queremos agradecer a los integrantes del Grupo de Investigación AeroTech, al Semillero de Aeronaves No Tripuladas (SANT), quienes con el gran deseo de ver los sueños volar, hicieron posible que este proyecto se hiciera realidad. También, queremos expresar nuestra gratitud a la Universidad de San Buenaventura, que hizo posible el desarrollo y financiación de proyectos y laboratorios afines. Finalmente, a la Universidad de San Buenaventura Medellín y a la Universidad de Medellín por su valioso aporte en el diseño, construcción y ajuste de los sensores que fueron aerotransportados en la aeronave ADAS X1
Referencias [1] Jimenez, P., Zuluaga, E. & Téllez, A. (2016). Validación de
rendimiento y dinámica de vuelo de una aeronave no tripulada multipropósito. Actas de Ingeniería 2, pp. 120-134.
[2] Anderson, J. (1999). Aircraft Performance and Design. USA: McGraw Hill Education.
[3] Raymer, D. (1992). Aircraft Design: A Conceptual Approach. California: AIAA Education Series.
[4] Agudelo, D. & Jimenez, P. (2013). Metodología de diseño de aeronaves no tripuladas: Teoría y Fundamentos. España: Editorial Académica Española.
[5] Gundlach, J. (2012). Designing Unmanned Aircraft Systems: A Comprehensive Approach. Reston: AIAA Education Series.
[6] McCormick, B. (1995). Aerodynamics, Aeronautics, and Flight Mechanics. New York: Wiley.
[7] Jimenez, P. et al. (2017). Diseño, analísis y validación de aeronaves no tripuladas. Medellín: Editorial Bonaventuriana.
[8] Jiménez, P. & Agudelo, D. (2015). Validation and Calibration of a High Resolution Sensor in Unmanned Aerial Vehicles for Producing Images in the IR Range Utilizable in Precision Agriculture. Florida: AIAA SciTech.
[9] Jimenez, P. (2013). Structural Design of a Composite Wing Structure. Germany: Lap Lambert Academic Publishing.





























