Embed Size (px)
Citation preview
September 21, 2015 10:5 WSPC/S0218-1274 1530027
International Journal of Bifurcation and Chaos, Vol. 25, No. 10 (2015) 1530027 (12 pages)c© World Scientific Publishing CompanyDOI: 10.1142/S021812741530027X
Design of Grid Multiscroll Chaotic Attractorsvia Transformations
Xingxing Ai, Kehui Sun∗, Shaobo He and Huihai WangSchool of Physics and Electronics,
Central South University,Changsha, Hunan 410083, P. R. China
∗School of Physics Science and Technology,Xinjiang University, Urumqi,Xinjiang 830046, P. R. China
Received December 25, 2014; Revised February 28, 2015
Three transformation approaches for generating grid multiscroll chaotic attractors are presentedthrough theoretical analysis and numerical simulation. Three kinds of grid multiscroll chaoticattractors are generated based on one-dimensional multiscroll Chua system. The dynamics ofthe multiscroll chaotic attractors are analyzed by means of equilibrium points, eigenvalues, thelargest Lyapunov exponent and complexity. As the experimental verification, we implementedthe circular grid multiscroll attractor on DSP platform. The simulation and experimental resultsare consistent well with that of theoretical analysis, and it shows that the design approaches areeffective.
Keywords : Chaos; grid multiscroll chaotic attractor; Chua system; complexity; DSP implemen-tation.
1. Introduction
Chaos has been studied extensively for severaldecades, and shows potential applications in manyfields, including secure communication, controlengineering, mathematics, physics and chemistry.Due to the application prospects, people are com-mitted to construct a chaotic system with good per-formance, such as a hyperchaotic system or complextopology structure system. A hyperchaotic systemhas two or more than two positive Lyapunov expo-nents [Shen et al., 2014a, 2014b], while a complextopology system, including multiscroll or multiwingchaotic systems, has more than two scrolls or twowings in the phase space [Zuo et al., 2014; Yu et al.,2010]. Both of the two classes of chaotic systems areuseful for chaos applications, and they are defined as
the strengthened chaotic system [Sun et al., 2014].Since multiscroll chaotic system has potential appli-cations in the field of secure communication [Aiet al., 2014; Lin et al., 2015], it has practical sig-nificance when carrying out research on design ofgrid multiscroll chaotic system.
Since Suykens and Vandewalle [1991, 1993]first introduced a family of n-double scroll chaoticattractors from quasi-linear function approach, andArena et al. [1995, 1996] realized the generalized n-double scroll Chua’s circuit by using a three-state-controlled cellular neural network, the research ofdesigning multiscroll chaotic system has become ahot topic in chaotic research field. Lu et al. [2002]presented a switching manifold approach for gen-erating chaotic attractors with multimerged basins
∗Author for correspondence
1530027-1
September 21, 2015 10:5 WSPC/S0218-1274 1530027
X. Ai et al.
of attraction. Cafagna and Grassi [2003a, 2003b]developed a coupling Chua circuit method by usingsine nonlinearity for creating one-dimensional n-scroll, two-dimensional grid multiscroll attractor.Lu and Chen [2006] surveyed the multiscroll chaoticattractor generation, including some fundamen-tal theories, design methodologies, circuit imple-mentations and practical applications. Meanwhile,some other functions, including hyperbolic function,trigonometric function, saw-tooth function, wereproposed to generate one-dimensional and grid mul-tiscroll chaotic attractors [Xu & Yu, 2010; Gunay,2012; Wang & Liu, 2008; Chen et al., 2010]. Inaddition, lots of new techniques have been reportedfor generating various types of one-dimensionaland grid multiscroll chaotic attractors [Lu et al.,2008; Zhang & Yu, 2010; Turk & Ogras, 2010;Turk & Gulten, 2011], especially by modern con-trol technology [Gui et al., 2013; Wang et al., 2009;Tang & Yu, 2013]. At present, it is easy to get one-dimensional multiscroll chaotic attractors based ongeneral chaotic systems, and some systems with gridmultiscroll attractor under specific conditions arereported in literature [Chua et al., 1986; Liu et al.,2012a; Liu et al., 2012b]. The problem is interestingwhen general approaches are extended to an one-dimensional multiscroll chaotic system into a gridmultiscroll chaotic system. We will focus on thisissue in this paper. Compared with conventionalanalogue circuits [Lu et al., 2006], digital circuits ofchaotic systems have better flexibility and repeata-bility, so we will take the DSP implementation ofthe circular grid multiscroll system as an experi-mental verification.
For the better application of the grid multi-scroll chaotic system, the dynamics analysis is veryimportant. In addition to the Lyapunov exponentanalysis [Wolf et al., 1985], complexity is also animportant way to analyze the dynamics of a chaoticsystem. It can reflect the security of the system tosome extent, if it is used in information securityfield. Currently, there are several methods to mea-sure the complexity of time series, including permu-tation entropy (PE) [Bandt & Pompe, 2002; Sunet al., 2013], statistical complexity measure (SCM)[Sun et al., 2011], sample entropy (SampEn) [Rich-man & Moorman, 2000], fuzzy entropy (FuzzyEn)[Chen et al., 2009], and spectral entropy (SE) [Stan-iczenko et al., 2009]. Among them, PE algorithm isa proper choice to estimate the complexity of a timeseries accurately and rapidly. Recently, multiscale
permutation entropy (MPE) was proposed to ana-lyze the complexity of time series for its faster com-putation speed [Fan et al., 2013]. In this paper, wewill employ MPE algorithm to measure the com-plexity of the chaotic sequence generated by differ-ent grid multiscroll chaotic attractors.
The rest of this paper is organized as follows.In Sec. 2, three kinds of transformation methodsare investigated to generate grid multiscroll chaoticattractors based on one-dimensional multiscrollChua system. The performances and implementa-tion of the multiscroll chaotic attractors are pre-sented in Sec. 3. Finally, we summarize the resultsand indicate future directions.
2. Grid Multiscroll AttractorGeneration and NumericalSimulation
2.1. Definition and principle oftransformation approaches
There are three methods for designing grid mul-tiscroll chaotic attractors, including parallel trans-formation (PT), mirror transformation (MT) androtation transformation (RT). Firstly, we describethe definitions of three different transformations.
Parallel transformation (Mirror transforma-tion, Rotation transformation) is an action intro-duced to obtain grid multiscroll attractor by paralleltransformation function (mirror symmetry transfor-mation function, rotation transformation function)based on one-dimensional multiscroll attractor.
A chaotic system can generate one-dimensionalmultiscroll attractor with m dimension as shownin Eq. (1). If the span of one-dimensional variablexi is consistent, then some transformation functionsf(xi) are introduced to replace the xi to obtain gridmultiscroll attractor.
x1 = f1(x1, x2, . . . , xm)
x2 = f2(x1, x2, . . . , xm)...
xm = fm(x1, x2, . . . , xm)
. (1)
It is well known that saddle-focus equilibriumpoint with index 2 is a necessary condition for gen-erating scroll attractor. If the equilibrium pointis saddle-focus equilibrium point with index 2, itcan generate scroll attractor in the phase plane.
1530027-2

September 21, 2015 10:5 WSPC/S0218-1274 1530027
Design of Grid Multiscroll Chaotic Attractors via Transformations
So the principle of designing multiscroll attractor isto extend the saddle-focus equilibrium point withindex 2.
Unless otherwise specified, we set the step sizeh = 0.001 and the iterative initial value (x, y, z) =(0.1, 0.1, 0.3) for the numerical simulation in thispaper.
2.2. Parallel transformation
Chua system is described by [Chua et al., 1986]
x = α(y − h(x))
y = x − y + z
z = −βy
, (2)
where α = 10, β = 16, and h(x) is the nonlinearfunction. For 2N + 2-scroll attractor, it is writtenas
h(x) = kx − pk
[−sgn(x) +
N∑i=0
sgn(x + 2ip)
+N∑
i=0
sgn(x − 2ip)
]. (3)
For 2N + 3-scroll attractor, it is given by
h(x) = kx − pk
[N∑
i=0
sgn(x + (1 + 2i)p)
+N∑
i=0
sgn(x − (1 + 2i)p)
], (4)
in which k = 0.3, p = 0.5, and
sgn(x) =
{1 if x > 0
−1 if x < 0. (5)
5-scroll chaotic attractor and 6-scroll chaoticattractor are obtained as shown in Fig. 1.
To get grid multiscroll chaotic attractors basedon system (2) with one-dimensional multiscrollattractor, a parallel transformation function y −f1(y) is added to the y dimension of the system (2).Then, system (2) becomes
x = α(y − f1(y) − h(x))
y = x − (y − f1(y)) + z
z = −β(y − f1(y))
, (6)
where f1(y) is defined as
f1(y) =M1∑i=1
A[1 + sgn(y − yi)]
±M2∑j=1
A[1 ± sgn(y − yj)], (7)
in which A = 2.5, α, β and h(x) are the same asabove. M1 and M2 are non-negative integers. Sys-tem (6) can generate (2N + 2) × (M1 + M2 + 1)scrolls or (2N + 3) × (M1 + M2 + 1) scrolls chaoticattractors. It is worth mentioning that A, yi and yj
are obtained by trial-and-error method. The valueof A is related with the size of attractor, whilethe values of yi and yj are related with the posi-tion of attractor. If f1(y) = A(1 + sgn(y − 2.5)),
(a) (b)
Fig. 1. Multiscroll chaotic attractors in x–y plane: (a) 5-scroll attractor and (b) 6-scroll attractor.
1530027-3
September 21, 2015 10:5 WSPC/S0218-1274 1530027
X. Ai et al.
(a) (b)
(c) (d)
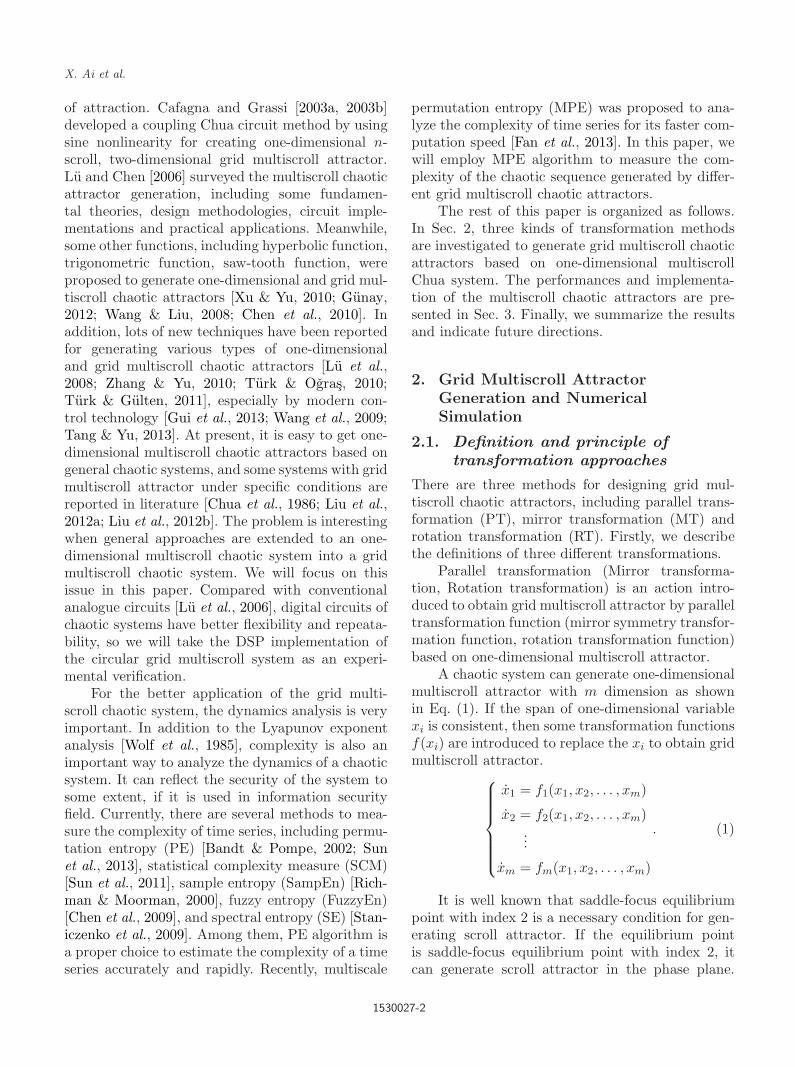
Fig. 2. Grid multiscroll chaotic attractors by PT: (a) 5 × 2 scrolls attractor, (b) 5 × 3 scrolls attractor, (c) 6 × 4 scrollsattractor and (d) 6 × 5 scrolls attractor.
then a 5 × 2 scrolls attractor is obtained as shownin Fig. 2(a). If f1(y) = A(1 + sgn(y − 2.5)) −A(1−sgn(y + 2.5)), then a 5 × 3 scrolls attractor is gen-erated as displayed in Fig. 2(b). If f1(y) = A(1 +sgn(y − 2.5))−A(1− sgn(y + 2.5))−A(1− sgn(y +7.5)), then a 6 × 4 scrolls attractor is obtainedas plotted in Fig. 2(c). If f1(y) = A(1 + sgn(y −7.5)) + A(1 + sgn(y − 2.5)) −A(1 − sgn(y + 2.5)) −A(1 − sgn(y + 7.5)), then a 6 × 5 scrolls attractoris obtained as displayed in Fig. 2(d). The chaoticattractors are evenly distributed and have a goodsymmetry. The span of the y dimension is con-sistent. It shows that the approach of designingmultiscroll chaotic attractors is correct and othermultiscroll chaotic attractors can be obtained bychanging the corresponding parameters.
2.3. Mirror transformation
Replacing the variable y with a mirror transforma-tion function sgn(y − y0)(y − y0) + y0 − f2(y) in
Eq. (2), it becomes
x = α(sgn(y − y0)(y − y0) + y0 − f2(y) − h(x))
y = sgn(y − y0)x − (y − y0) − sgn(y − y0)
× (y0 − f2(y)) + sgn(y − y0)z
z = −β(sgn(y − y0)(y − y0) + y0 − f2(y))
,
(8)
here, f2(y) is defined by
f2(y) =M3∑i=1
A[1 + sgn(sgn(y − y0)(y − y0)
− (yi − y0))], (9)
where α = 10, β and h(x) are the same as above. M3
is non-negative integer. A, y0 and yi are obtainedby trial-and-error method. The value of A is relatedwith the size of attractor, while the values of y0 andyi are related with the position of attractor.
1530027-4

September 21, 2015 10:5 WSPC/S0218-1274 1530027
Design of Grid Multiscroll Chaotic Attractors via Transformations
(a) (b)
(c) (d)
Fig. 3. Grid multiscroll chaotic attractors by MT: (a) 4 × 2 scrolls attractor, (b) 5 × 4 scrolls attractor, (c) 6 × 6 scrollsattractor and (d) 7 × 8 scrolls attractor.
By employing mirror transformation, (2N +2) × (2M3 + 2) scrolls or (2N + 3) × (2M3 + 2)scrolls chaotic attractors could be generated fromsystem (8). Setting A = 2.5, y0 = −2.7, y1 = 2.5,y2 = 7.5 and y3 = 12.5, the phase diagram of x–yplane are shown in Fig. 3. M3 is equal to 0, 1, 2, 3 inFigs. 3(a)–3(d), respectively. The results show thatwe can get grid multiscroll chaotic attractors fromone-dimensional multiscroll chaotic system via mir-ror transformation, and the grid multiscroll attrac-tor is mirror-symmetrical in the y dimension. Thegrid multiscroll chaotic attractors are evenly dis-tributed. The span of the y dimension is consistent.
2.4. Rotation transformation
Similarly, if the rotation transformation is appliedto system (2), then it becomes
x = Hx(H1 cos(θ) + H2 sin(θ))
y = Hy(−H1 sin(θ) + H2 cos(θ))
z = −β((|x − x0| + x0) sin(θ)
+ (|y − y0| + y0) cos(θ))
, (10)
where the rotation angle θ = π/4. Hx and Hy aredefined as
Hx =1
2× 0.04(|x− x0 + 0.04| − |x−x0 − 0.04|)
Hy =1
2× 0.04(|y− y0 + 0.04| − |y− y0 − 0.04|)
.
(11)
H1 and H2 are defined as
1530027-5
September 21, 2015 10:5 WSPC/S0218-1274 1530027
X. Ai et al.
H1 = α[(|x − x0| + x0) sin(θ) + (|y − y0| + y0)
× cos(θ) − h((|x − x0| + x0) cos(θ)
− (|y − y0| + y0) sin(θ))]
H2 = [(|x − x0| + x0) cos(θ) − (|y − y0| + y0)
× sin(θ) − ((|x − x0| + x0) sin(θ)
+ (|y − y0| + y0) cos(θ)) + z]
,
(12)
where α, β and h(x) are the same as above. Itis worth mentioning that x0 and y0 called turn-ing points are obtained by trial-and-error method.The principle of rotation transformation methodincludes three steps. Firstly, the one-dimensional
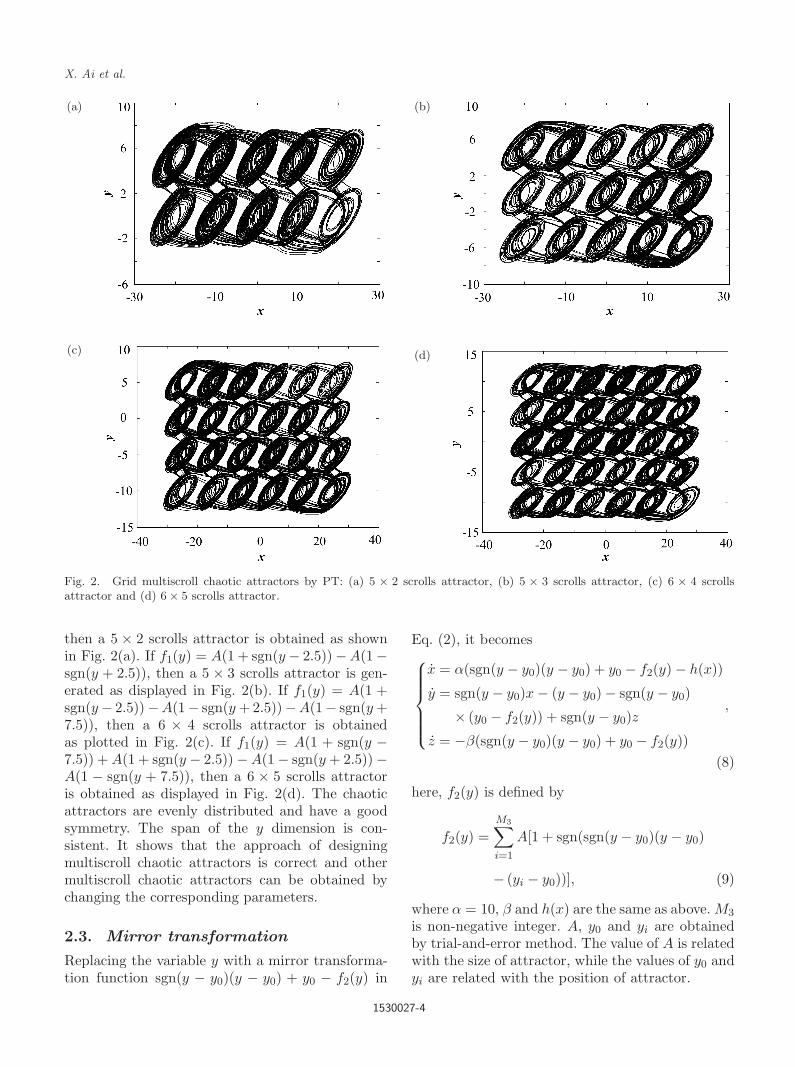
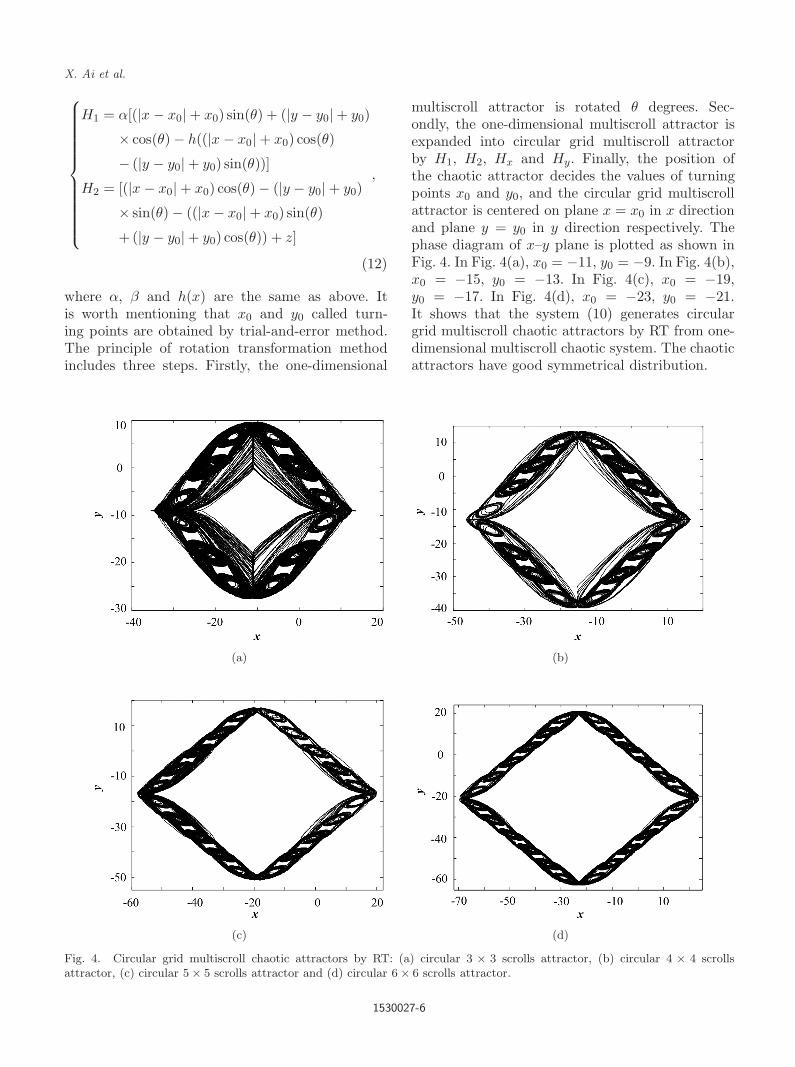
multiscroll attractor is rotated θ degrees. Sec-ondly, the one-dimensional multiscroll attractor isexpanded into circular grid multiscroll attractorby H1, H2, Hx and Hy. Finally, the position ofthe chaotic attractor decides the values of turningpoints x0 and y0, and the circular grid multiscrollattractor is centered on plane x = x0 in x directionand plane y = y0 in y direction respectively. Thephase diagram of x–y plane is plotted as shown inFig. 4. In Fig. 4(a), x0 = −11, y0 = −9. In Fig. 4(b),x0 = −15, y0 = −13. In Fig. 4(c), x0 = −19,y0 = −17. In Fig. 4(d), x0 = −23, y0 = −21.It shows that the system (10) generates circulargrid multiscroll chaotic attractors by RT from one-dimensional multiscroll chaotic system. The chaoticattractors have good symmetrical distribution.
(a) (b)
(c) (d)
Fig. 4. Circular grid multiscroll chaotic attractors by RT: (a) circular 3 × 3 scrolls attractor, (b) circular 4 × 4 scrollsattractor, (c) circular 5 × 5 scrolls attractor and (d) circular 6 × 6 scrolls attractor.
1530027-6

September 21, 2015 10:5 WSPC/S0218-1274 1530027
Design of Grid Multiscroll Chaotic Attractors via Transformations
3. Performance Analysis and DSPImplementation
3.1. Equilibrium points andeigenvalues
The principle of generating grid multiscroll chaoticattractors is to extend equilibrium points withindex 2 from one-dimensional multiscroll system,so we just take the one-dimensional 6-scroll attrac-tor from system (2) as an example to calculate theequilibrium points and eigenvalues. Set the left sideof Eq. (2) to zero, and then the equilibrium pointcoordinates are
x = ip
y = 0
z = −ip
(i = 0,±1,±2,±3,±4,±5). (13)
To calculate the Jacobian matrix correctly, thediscontinuous function sgn(x) is replaced by con-tinuous function tanh(100x) [Sun & Sprott, 2010].Jacobian matrix of system (2) is
J(xi) =
hJ 10 0
1 −1 1
0 −16 0
, (14)
where hJ is solved by
hJ = −10k − 10kp[100(tanh(100x)2 − 1)
+ 100(tanh(100(2p ± x))2 − 1)
+ 100(tanh(100(4p ± x))2 − 1)], (15)
then the eigenvalues of all equilibrium points areobtained as follows,
E±0 = 1.4970,−0.0005 ± 0.0040i
E±5 = −4.4205, 0.2102 ± 3.2885i
E±10 = 1.4970,−0.0005 ± 0.0040i
E±15 = −4.4205, 0.2102 ± 3.2885i
E±20 = 1.4970,−0.0005 ± 0.0040i
E±25 = −4.4205, 0.2102 ± 3.2885i
. (16)
It is obvious that the ±0, ±10 and ±20 equi-librium points are saddle-focus equilibrium pointswith index 1, and the ±5, ±15 and ±25 equi-librium points are saddle-focus equilibrium pointswith index 2. So the system has six saddle-focusequilibrium points with index 2, and the 6-scrollattractor is generated.
Table 1. The largest Lyapunov exponent with differentscrolls by PT.
N = 3 N = 4 N = 5 N = 6 N = 7 N = 8
N × 1 0.2149 0.2975 0.2132 0.2396 0.2148 0.2226N × 2 0.2147 0.2422 0.2132 0.2396 0.2148 0.2226N × 3 0.2251 0.2739 0.2132 0.2396 0.2148 0.2226N × 4 0.2397 0.2717 0.2132 0.2396 0.2148 0.2226N × 5 0.2185 0.2284 0.2132 0.2396 0.2148 0.2226N × 6 0.2138 0.2640 0.2132 0.2396 0.2148 0.2226
3.2. The largest Lyapunov exponent
The largest Lyapunov exponent of the systems withdifferent scrolls are calculated based on the Wolfalgorithm [Wolf et al., 1985], and the results arelisted in Tables 1–3, respectively. It is worth men-tioning that the values of the first line of Tables 1and 2 are the same, because they are the resultsfrom the same system, namely one-dimensionalmultiscroll system. Obviously, the largest Lyapunovexponents are greater than zero, which means allthese multiscroll attractors are chaotic. In order todisplay more clearly, the data of Tables 1 and 2 aredepicted in Fig. 5. It shows that the largest Lya-punov exponent with different scrolls is located onthe same level, and the largest Lyapunov exponentof systems with even number of scrolls is slightlylarger than that of those with odd number as shownin Fig. 5. The results of Table 3 show that thelargest Lyapunov exponent of circular 5 × 5 scrollsattractor and circular 6 × 6 scrolls attractor arelarger than that of circular 3 × 3 scrolls attractorand circular 4 × 4 scrolls attractor. Therefore, the
Table 2. The largest Lyapunov exponent with differentscrolls by MT.
N = 3 N = 4 N = 5 N = 6 N = 7 N = 8
N × 1 0.2149 0.2975 0.2132 0.2396 0.2148 0.2226N × 2 0.2091 0.2335 0.2044 0.2464 0.2130 0.2212N × 4 0.2182 0.2728 0.2075 0.2737 0.2128 0.2823N × 6 0.2091 0.2342 0.2130 0.2737 0.2133 0.2993N × 8 0.2083 0.2322 0.2130 0.2737 0.2132 0.2719N × 10 0.2109 0.2781 0.2096 0.2737 0.2132 0.2719
Table 3. The largest Lyapunov exponent withdifferent scrolls by RT.
Circular Circular Circular Circular3 × 3 4 × 4 5 × 5 6 × 6
0.0994 0.0455 0.2105 0.2393
1530027-7

September 21, 2015 10:5 WSPC/S0218-1274 1530027
X. Ai et al.
(a) (b)
Fig. 5. The largest Lyapunov exponent with different scrolls: (a) data from Table 1 and (b) data from Table 2.
systems with even number of scrolls generated byPT and MT are better for their application in securecommunication, and the high number scrolls by RTwould be more reasonable.
3.3. Complexity analysis
Complexity of grid multiscroll chaotic systems isanalyzed in this section by MPE, which is an algo-rithm based on PE. At first, the PE algorithm [Sunet al., 2013] is briefly presented as follows.
Step 1. Defining probability distribution. For dif-ferent dimension d, the probability distribution p(π)is defined by
p(π) =#{i | i ≤ T − d + 1,has type π}
T − d + 1, (17)
where the symbol # stands for number and π is thepossible order pattern.
Step 2. Calculating PE. According to the definitionof Shannon entropy, PE is denoted as
PE(x, d) = −k∑
j=1
pj(π) ln(pj(π))ln(d!)
. (18)
The normalized entropy is evaluated for thispermutation probability distribution. The range ofd is {2, 4, . . . , 7}. In this paper, we choose d = 5 tocalculate PE. Obviously, larger PE value means thetime series is more complex.
To improve the computation speed, the MPEalgorithm was proposed [Fan et al., 2013], and it isbriefly described as follows.
Step 1. Coarse-grained procedure. Given a one-dimensional discrete time series {x(i) : i = 1, 2, . . . ,N}, the consecutive coarse-grained time series areconstructed by
yτ (j) =1τ
jτ∑i=(j−1)τ+1
x(i), (19)
where 1 ≤ j ≤ [N/τ ], and [·] denotes the floor func-tion.
Step 2. Complexity calculation. MPE is defined as
MPE(x, τ, d) = PE(yτ , d). (20)
Taking three kinds of 6 × 6 scrolls chaoticattractors as example, we set the max-scale τ = 200.The y sequence is chosen to calculate the complex-ity of three different kinds of chaotic sequence byMPE. The result is shown in Fig. 6. It shows thatcomplexity value of the chaotic sequence increasesrapidly and then begins to flatten out with scalefactor. The increasing rate represents the capacityto generate new information. Obviously, the PE ofcircular 6× 6 scrolls attractor increases faster thanthat of the others. In order to analyze the increasingrate, the quadratic curve fitting is applied for theresults. The fitting equation is shown in Table 4. Itshows that the fitting equation of chaotic sequenceis quadratic, and the rate of system generated by RTis the biggest. The rate of grid multiscroll systemgenerated by PT is as fast as that of the grid multi-scroll system generated by MT. Hence, the capacityof generating new information by the RT is betterthan that by the others. As the derivative of fittingequation is a straight line equation with the same
1530027-8

September 21, 2015 10:5 WSPC/S0218-1274 1530027
Design of Grid Multiscroll Chaotic Attractors via Transformations
(a) (b) (c)
Fig. 6. Multiscale PE complexity: (a) by PT, (b) by MT and (c) by RT.
Table 4. Fitting equation.
PT MT RT
Fitting equation −0.0001t2 + 0.0153t + 0.2181 −0.0001t2 + 0.0150t + 0.2250 −0.0001t2 + 0.0182t + 0.2113Derivative of fitting equation −0.0002t + 0.0153 −0.0002t + 0.0150 −0.0002t + 0.0182
slope, we just use the constant term to compare theMPE with different scrolls. The constants of dif-ferent scrolls are shown in Tables 5–7, respectively.For the same reason as above, the values of the firstlines of Tables 5 and 6 are the same. It can be seenthat the rate of one-dimensional multiscroll systemis the smallest, while that of the grid multiscrollsystem generated by RT is the largest. In addition,the slope of the grid multiscroll system generated byPT is as large as that of the grid multiscroll systemgenerated by MT.
3.4. DSP implementation
In this section, as an experimental verification, thedigital circuit of the circular grid multiscroll systemis implemented based on DSP technique. Firstly, thehardware platform is designed as shown in Figs. 7and 8. It mainly consists of three parts, such as aDSP board, a D/A converter, and an oscilloscope.
Table 5. Constant term of the derivative equation withdifferent scrolls by PT.
N = 3 N = 4 N = 5 N = 6 N = 7 N = 8
N × 1 0.0144 0.0144 0.0143 0.0145 0.0145 0.0146N × 2 0.0152 0.0153 0.0153 0.0153 0.0153 0.0152N × 3 0.0153 0.0152 0.0153 0.0153 0.0153 0.0151N × 4 0.0151 0.0154 0.0152 0.0153 0.0152 0.0155N × 5 0.0153 0.0152 0.0152 0.0153 0.0154 0.0153N × 6 0.0155 0.0153 0.0155 0.0153 0.0154 0.0153
Table 6. Constant term of the derivative equation withdifferent scrolls by MT.
N = 3 N = 4 N = 5 N = 6 N = 7 N = 8
N × 1 0.0144 0.0144 0.0143 0.0145 0.0145 0.0146N × 2 0.0142 0.0146 0.0144 0.0145 0.0146 0.0145N × 4 0.0148 0.0152 0.0150 0.0150 0.0152 0.0151N × 6 0.0149 0.0151 0.0151 0.0150 0.0153 0.0152N × 8 0.0152 0.0151 0.0151 0.0153 0.0152 0.0154N × 10 0.0154 0.0151 0.0152 0.0154 0.0155 0.0152
The key chip of the DSP board is the fixed-pointDSP TMS320F2812. The D/A converter DAC8552with a 16-bit dual-channel is used to convert thetime series generated by DSP. The oscilloscopeMSO 4102B-L is used to record phase portraits ofthe system. Secondly, we discretize Eqs. (10)–(12)
Table 7. Constant term of the derivative equationwith different scrolls by RT.
Circular Circular Circular Circular3 × 3 4 × 4 5 × 5 6 × 6
0.0163 0.0181 0.0182 0.0182
Fig. 7. Block diagram for DSP implementation.
1530027-9
September 21, 2015 10:5 WSPC/S0218-1274 1530027
X. Ai et al.
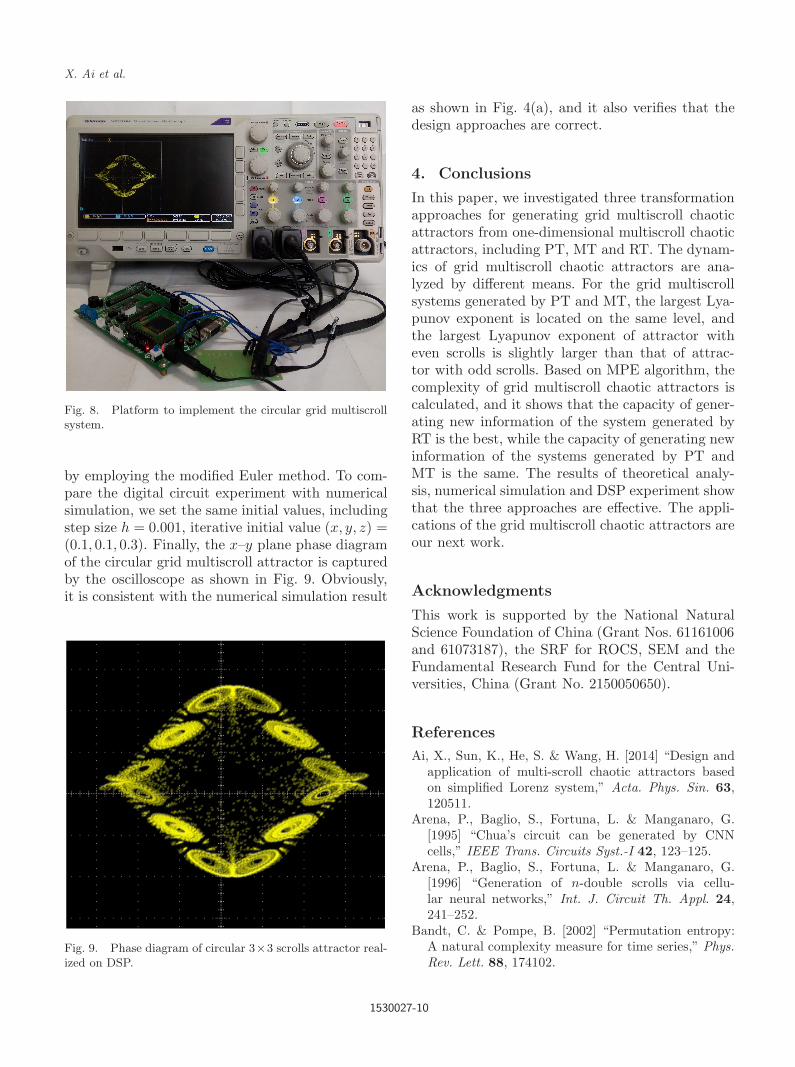
Fig. 8. Platform to implement the circular grid multiscrollsystem.
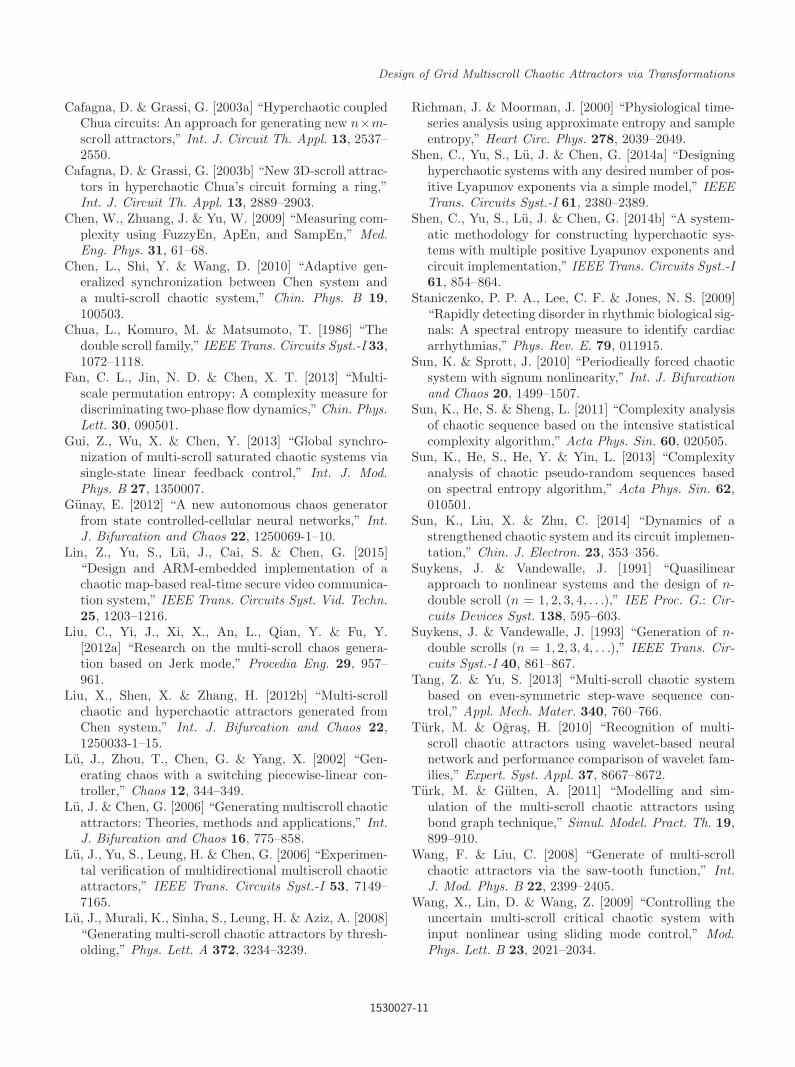
by employing the modified Euler method. To com-pare the digital circuit experiment with numericalsimulation, we set the same initial values, includingstep size h = 0.001, iterative initial value (x, y, z) =(0.1, 0.1, 0.3). Finally, the x–y plane phase diagramof the circular grid multiscroll attractor is capturedby the oscilloscope as shown in Fig. 9. Obviously,it is consistent with the numerical simulation result
Fig. 9. Phase diagram of circular 3×3 scrolls attractor real-ized on DSP.
as shown in Fig. 4(a), and it also verifies that thedesign approaches are correct.
4. Conclusions
In this paper, we investigated three transformationapproaches for generating grid multiscroll chaoticattractors from one-dimensional multiscroll chaoticattractors, including PT, MT and RT. The dynam-ics of grid multiscroll chaotic attractors are ana-lyzed by different means. For the grid multiscrollsystems generated by PT and MT, the largest Lya-punov exponent is located on the same level, andthe largest Lyapunov exponent of attractor witheven scrolls is slightly larger than that of attrac-tor with odd scrolls. Based on MPE algorithm, thecomplexity of grid multiscroll chaotic attractors iscalculated, and it shows that the capacity of gener-ating new information of the system generated byRT is the best, while the capacity of generating newinformation of the systems generated by PT andMT is the same. The results of theoretical analy-sis, numerical simulation and DSP experiment showthat the three approaches are effective. The appli-cations of the grid multiscroll chaotic attractors areour next work.
Acknowledgments
This work is supported by the National NaturalScience Foundation of China (Grant Nos. 61161006and 61073187), the SRF for ROCS, SEM and theFundamental Research Fund for the Central Uni-versities, China (Grant No. 2150050650).
References
Ai, X., Sun, K., He, S. & Wang, H. [2014] “Design andapplication of multi-scroll chaotic attractors basedon simplified Lorenz system,” Acta. Phys. Sin. 63,120511.
Arena, P., Baglio, S., Fortuna, L. & Manganaro, G.[1995] “Chua’s circuit can be generated by CNNcells,” IEEE Trans. Circuits Syst.-I 42, 123–125.
Arena, P., Baglio, S., Fortuna, L. & Manganaro, G.[1996] “Generation of n-double scrolls via cellu-lar neural networks,” Int. J. Circuit Th. Appl. 24,241–252.
Bandt, C. & Pompe, B. [2002] “Permutation entropy:A natural complexity measure for time series,” Phys.Rev. Lett. 88, 174102.
1530027-10
September 21, 2015 10:5 WSPC/S0218-1274 1530027
Design of Grid Multiscroll Chaotic Attractors via Transformations
Cafagna, D. & Grassi, G. [2003a] “Hyperchaotic coupledChua circuits: An approach for generating new n×m-scroll attractors,” Int. J. Circuit Th. Appl. 13, 2537–2550.
Cafagna, D. & Grassi, G. [2003b] “New 3D-scroll attrac-tors in hyperchaotic Chua’s circuit forming a ring,”Int. J. Circuit Th. Appl. 13, 2889–2903.
Chen, W., Zhuang, J. & Yu, W. [2009] “Measuring com-plexity using FuzzyEn, ApEn, and SampEn,” Med.Eng. Phys. 31, 61–68.
Chen, L., Shi, Y. & Wang, D. [2010] “Adaptive gen-eralized synchronization between Chen system anda multi-scroll chaotic system,” Chin. Phys. B 19,100503.
Chua, L., Komuro, M. & Matsumoto, T. [1986] “Thedouble scroll family,” IEEE Trans. Circuits Syst.-I 33,1072–1118.
Fan, C. L., Jin, N. D. & Chen, X. T. [2013] “Multi-scale permutation entropy: A complexity measure fordiscriminating two-phase flow dynamics,” Chin. Phys.Lett. 30, 090501.
Gui, Z., Wu, X. & Chen, Y. [2013] “Global synchro-nization of multi-scroll saturated chaotic systems viasingle-state linear feedback control,” Int. J. Mod.Phys. B 27, 1350007.
Gunay, E. [2012] “A new autonomous chaos generatorfrom state controlled-cellular neural networks,” Int.J. Bifurcation and Chaos 22, 1250069-1–10.
Lin, Z., Yu, S., Lu, J., Cai, S. & Chen, G. [2015]“Design and ARM-embedded implementation of achaotic map-based real-time secure video communica-tion system,” IEEE Trans. Circuits Syst. Vid. Techn.25, 1203–1216.
Liu, C., Yi, J., Xi, X., An, L., Qian, Y. & Fu, Y.[2012a] “Research on the multi-scroll chaos genera-tion based on Jerk mode,” Procedia Eng. 29, 957–961.
Liu, X., Shen, X. & Zhang, H. [2012b] “Multi-scrollchaotic and hyperchaotic attractors generated fromChen system,” Int. J. Bifurcation and Chaos 22,1250033-1–15.
Lu, J., Zhou, T., Chen, G. & Yang, X. [2002] “Gen-erating chaos with a switching piecewise-linear con-troller,” Chaos 12, 344–349.
Lu, J. & Chen, G. [2006] “Generating multiscroll chaoticattractors: Theories, methods and applications,” Int.J. Bifurcation and Chaos 16, 775–858.
Lu, J., Yu, S., Leung, H. & Chen, G. [2006] “Experimen-tal verification of multidirectional multiscroll chaoticattractors,” IEEE Trans. Circuits Syst.-I 53, 7149–7165.
Lu, J., Murali, K., Sinha, S., Leung, H. & Aziz, A. [2008]“Generating multi-scroll chaotic attractors by thresh-olding,” Phys. Lett. A 372, 3234–3239.
Richman, J. & Moorman, J. [2000] “Physiological time-series analysis using approximate entropy and sampleentropy,” Heart Circ. Phys. 278, 2039–2049.
Shen, C., Yu, S., Lu, J. & Chen, G. [2014a] “Designinghyperchaotic systems with any desired number of pos-itive Lyapunov exponents via a simple model,” IEEETrans. Circuits Syst.-I 61, 2380–2389.
Shen, C., Yu, S., Lu, J. & Chen, G. [2014b] “A system-atic methodology for constructing hyperchaotic sys-tems with multiple positive Lyapunov exponents andcircuit implementation,” IEEE Trans. Circuits Syst.-I61, 854–864.
Staniczenko, P. P. A., Lee, C. F. & Jones, N. S. [2009]“Rapidly detecting disorder in rhythmic biological sig-nals: A spectral entropy measure to identify cardiacarrhythmias,” Phys. Rev. E. 79, 011915.
Sun, K. & Sprott, J. [2010] “Periodically forced chaoticsystem with signum nonlinearity,” Int. J. Bifurcationand Chaos 20, 1499–1507.
Sun, K., He, S. & Sheng, L. [2011] “Complexity analysisof chaotic sequence based on the intensive statisticalcomplexity algorithm,” Acta Phys. Sin. 60, 020505.
Sun, K., He, S., He, Y. & Yin, L. [2013] “Complexityanalysis of chaotic pseudo-random sequences basedon spectral entropy algorithm,” Acta Phys. Sin. 62,010501.
Sun, K., Liu, X. & Zhu, C. [2014] “Dynamics of astrengthened chaotic system and its circuit implemen-tation,” Chin. J. Electron. 23, 353–356.
Suykens, J. & Vandewalle, J. [1991] “Quasilinearapproach to nonlinear systems and the design of n-double scroll (n = 1, 2, 3, 4, . . .),” IEE Proc. G.: Cir-cuits Devices Syst. 138, 595–603.
Suykens, J. & Vandewalle, J. [1993] “Generation of n-double scrolls (n = 1, 2, 3, 4, . . .),” IEEE Trans. Cir-cuits Syst.-I 40, 861–867.
Tang, Z. & Yu, S. [2013] “Multi-scroll chaotic systembased on even-symmetric step-wave sequence con-trol,” Appl. Mech. Mater. 340, 760–766.
Turk, M. & Ogras, H. [2010] “Recognition of multi-scroll chaotic attractors using wavelet-based neuralnetwork and performance comparison of wavelet fam-ilies,” Expert. Syst. Appl. 37, 8667–8672.
Turk, M. & Gulten, A. [2011] “Modelling and sim-ulation of the multi-scroll chaotic attractors usingbond graph technique,” Simul. Model. Pract. Th. 19,899–910.
Wang, F. & Liu, C. [2008] “Generate of multi-scrollchaotic attractors via the saw-tooth function,” Int.J. Mod. Phys. B 22, 2399–2405.
Wang, X., Lin, D. & Wang, Z. [2009] “Controlling theuncertain multi-scroll critical chaotic system withinput nonlinear using sliding mode control,” Mod.Phys. Lett. B 23, 2021–2034.
1530027-11

September 21, 2015 10:5 WSPC/S0218-1274 1530027
X. Ai et al.
Wolf, A., Swift, J., Swinney, H. & Vastano, J. A.[1985] “Determining Lyapunov exponents from a timeseries,” Physica D 16, 285–317.
Xu, F. & Yu, P. [2010] “Chaos control and chaos syn-chronization for multi-scroll chaotic attractors gen-erated using hyperbolic functions,” J. Math. Anal.Appl. 362, 252–274.
Yu, S., Tang, W., Lu, J. & Chen, G. [2010] “Designand implementation of multi-wing butterfly chaotic
attractors via Lorenz-type systems,” Int. J. Bifurca-tion and Chaos 20, 29–41.
Zhang, C. & Yu, S. [2010] “Design and implementationof a novel multi-scroll chaotic system,” Chin. Phys. B18, 119–129.
Zuo, T., Sun, K., Ai, X. & Wang, H. [2014] “High-order grid multi-scroll chaotic attractors generated bythe second generation current conveyor circuit,” IEEETrans. Circuits Syst.-II 61, 818–822.
1530027-12





























