Embed Size (px)
Citation preview

Module Title: Control Systems Design (EE3005)
Title: Design via Root Locus and Frequency Response
Contents
Introduction......................................................................................................................................3
Results..............................................................................................................................................4
Discussion......................................................................................................................................15
Conclusion.....................................................................................................................................16
References......................................................................................................................................16
1

Introduction
The key characteristic of control is to interfere, to influence or to modify the process. This control function or the interference to the process is introduced by an organization of parts (including operators in manual control) that, when connected together is called the Control System. Depending on whether a human body (the operator) is physically involved in the control system, they are divided into Manual Control and Automatic Control. Due to its efficiency, accuracy and reliability, automatic control is widely used. (Edinburgh, 2011)
This assignment aims at presenting the design of control systems using root locus and frequency response by calculations and verifying using MATLAB.
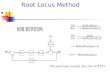
Root locus analysis is a graphical method for examining how the roots of a system change with variation of a certain system parameter, commonly the gain of a feedback system. This is a technique used in the field of control systems developed by Walter R. Evans. (Wikipedia, October 2011)
Given a feedback control system and the root locus for the system would be found used to predict aspects of the system's closed loop behavior, including speed of response, the proportional controller gain(s) that will produce a given damping ratio in complex poles.( E. J. Mastascusa, 2011)
Frequency response uses Bode plots. A Bode plot is a graph of the transfer function of a linear, time-invariant system versus frequency, plotted with a log-frequency axis, to show the system's frequency response. It is usually a combination of a Bode magnitude plot, expressing the magnitude of the frequency response gain, and a Bode phase plot, expressing the frequency response phase shift. (Wikipedia, 2011).
The frequency response is a representation of the system's response to sinusoidal inputs at varying frequencies. The output of a linear system to a sinusoidal input is a sinusoid of the same frequency but with a different magnitude and phase. The frequency response is defined as the magnitude and phase differences between the input and output sinusoids. (Michigan, 2011).
2

Results
1. Figure shows a unity feedback, closed-loop control system with the following open-loop transfer function :
G(s)= k
( s2+20 s+101 )(s+20)
The closed-loop system response is desired to have a damping ratio of ζ of 0.37 and a settling time Ts of 0.9s
a. Evaluate the dominant poles
ζ = 0.37; Ts= 0.9s
ωn= 4ζ∗Ts
= 40.37∗0.9
=12.012 rads /s
S1,2¿−ξ∗ωn± jωn√1−ξ2
S1,2¿−0.37∗12.012± j12.012√1−0.372
S1,2¿−4.44± j11.160
b. Evaluate the location of the compensator zero if the compensator pole is located at -15.
∠k (s+Zc)
(s2+20 s+101 ) (s+20 )(s+15)∣S1,2=−4.44± j 11.160=∠151.03 °
180 °−151.03 °=28.97 °
3

tan28.97 °= 11.160Zc−4.44
Zc= 11.160tan 28.97 °
+4.44=24.60
Compensator zero, Gc=(s+24.60)
c. Evaluate system gain
k (s+Zc)(s2+20 s+101 ) (s+20 )(s+15)
∣S1,2=−4.44± j 11.160=1
k (s+24.60)(s2+20 s+101 ) (s+20 )(s+15)
∣S1,2=−4.44± j 11.160=1
5.05775∗10−4 k=1
K=1977.163
The required system gain is K = 1977.163
4

Using MATLAB
% uncompensated and compensated step response% Uncompensated
predeng1 = [1]; % numeratorpredeng2 = [1 20 101];predeng3 = [1 20];predeng4=conv(predeng2,predeng3)G1 = tf(predeng1,predeng4)z = 0.37;rlocus(G1) % Plot uncompensated root locussgrid(z,0) % Overlay desired percent overshoot linetitle('Uncompensated Root Locus') % Title uncompensated root locus[K1] = rlocfind(G1) % Generate gain, K, and closed-loop, poles'T1(s)'T1 = feedback(K1*G1,1) % Find uncompensated T1(s)T1zpk=zpk(T1)poles = pole(T1)
%compensated
zc = 24.6; % Calculated PD zero locationpredeng5 = [1 24.6]; %numerator for the compensator systempredeng6 =[1 15]; % Calculate numerator of Gc(s)Gc = tf(predeng5,predeng6)Ge = G1*Gc % Cascade G(s) and Gc(s)Gezpk=zpk(Ge)rlocus(Ge) % Plot root locussgrid (z, 0) % Overlay desired percent overshoot linetitle ('Compensated Root Locus')[K2] = rlocfind(Ge)'T2(s)'T2 = feedback(K2*Ge,1) % Create and display PD compensatedT2zpk=zpk(T2)poles = pole(T2)step(T2,T1)title(['Step Response for Uncompensated and Compensated Systems'])grid on;
5

MATLAB Response:
predeng4 = 1 40 501 2020
Transfer function: 1---------------------------s^3 + 40 s^2 + 501 s + 2020
Select a point in the graphics window
selected_point = -5.0918 +12.8810i
K1 =3.7289e+003
ans =T1(s)
Transfer function: 3729---------------------------s^3 + 40 s^2 + 501 s + 5749 Zero/pole/gain: 3728.9466------------------------------(s+29.64) (s^2 + 10.36s + 194) poles = -29.6411 -5.1794 +12.9277i -5.1794 -12.9277i
Transfer function:s + 24.6-------- s + 15 Transfer function: s + 24.6----------------------------------------s^4 + 55 s^3 + 1101 s^2 + 9535 s + 30300
6

Zero/pole/gain: (s+24.6)-------------------------------(s+20) (s+15) (s^2 + 20s + 101) Select a point in the graphics window
selected_point =
-4.3673 +10.9294i
K2 =1.9048e+003
ans =
T2(s)
Transfer function: 1905 s + 4.686e004-------------------------------------------------s^4 + 55 s^3 + 1101 s^2 + 1.144e004 s + 7.716e004 Zero/pole/gain: 1904.7562 (s+24.6)-------------------------------------------(s^2 + 45.96s + 543.4) (s^2 + 9.044s + 142)
poles =
-22.9781 + 3.9236i -22.9781 - 3.9236i -4.5219 +11.0247i -4.5219 -11.0247i
7

Root locus of the uncompensated system.
Root locus of the compensated system.
8

Step response of the compensated and uncompensated system.
9

2. Figure Q2 shows a unity feedback, closed-loop control system with the following open-loop transfer function:
G(s)=k (s+20 )(s+25)
s (s+5 ) (s+8 )(s+14 )
a. Use the frequency response method to evaluate the value of the gain, k, to yield a step response with a 15% percentage overshoot OS%. Make any required second order approximations.
Percentage overshoot OS% =15;
Using : ζ =
−ln(%OS100 )
√π2+ ln2(%OS100 )
ζ = −ln (0.15 )
√π2+ ln2 (0.15 )=0.5169
Phase margin to achieve 15% overshoot:
φ PM= tan−12∗ζ
√−2¿¿¿
φ PM=tan−12∗(0.5169)√−2¿¿¿
= 53.17°
10

Phase margin occurs when Magnitude = 0dB. At this point, the phase should be:
-180° + 53.17° = -127°
From the bode plot at -1270 the radian frequency is 2.23 rad/s,
Tracing this value the gain margin (Gm) at 2.23 rad/s is: -9.12
Gm(dB)=0−(−9.12)=9.12
9.12=20∗log10 k
Therefore k=10(9.12 /20)=2.8576
K=2.8576
11

%MATLAB CODE FOR G(S)= K(S+20)(S+25)/S(S+5)(S+8)(S+14)
%code for bode plot G = zpk([-20 -25],[0 -5 -8 -14], 1)Bode(G)grid on
%code for the step responsek = 2.8576T = feedback(k*G,1);Step(T)
MATLAB Results:
Zero/pole/gain: (s+20) (s+25)--------------------s (s+5) (s+8) (s+14)
k = 2.8576
Bode plot for K = 1
12

Step response of the system
13

Discussion
In order that a system has the desired transient response, the design procedure via gain adjustment usually consists of the following three steps, sketching of the root locus for the system, finding the damping ratio, which results in the desired transient response; and then drawing a radial line to represent the damping ratio, from which the dominate pole, which is the intersection of the root locus and the damping ratio line, as well as the corresponding value of gain, K is found. The compensated and uncompensated have the same the same percent overshoot (due to the same ζ), but the response of the compensated should be faster than that of the point uncompensated (due to the larger real part of compensated when compared with the uncompensated)
Using ζ = 0.37; Ts= 0.9s and ωn=12.012 rads/s, the dominant poles was found to be S1, =-4.44 ± j11.160 from this the compensator zeros Zc was found to be 24.60 and enabled the calculation of the gain K to be 1977.163. the calculation steps is shown in the results.
This results were confirmed to be same using MATLAB by plotting the root locus and selecting the poles for both the compensated and uncompensated system. The step response clearly shows that the compensated system faster with a settling time of 0.749s while the uncompensated settled at 0.777s.
Consistent with the theory compensated close loop dominant pole have more negative real parts than the uncompensated dominant close-loop poles which results in shorter Ts. Compensated systems have larger imaginary parts which lead t smaller Tp and the farther the dominant poles, the compensated close-loop dominant poles moves close to the origin and to the uncompensated close-loop poles with all compensated systems having same %OS.
For the frequency response based design there was a requirement to evaluate the value of the gain, k, to yield a step response with a 15% percentage overshoot OS%. From the %OS specified the damping ratio ζ was found to be 0.5169 from which phase margin was calculated to be 53.17°. Since phase margin occurs when Magnitude = 0dB. At this point, the phase should be:-180° + 53.17° = -127° tracing the point -127° on the phase plot it is located at 2.23 rad/s on the phase plot, and the tracing the frequency 2.23 rad/s gave a gain margin Gm(dB) = 0- (-9.12) = 9.12. using Gm = 20*log10k, the gain K was found to be 2.8576.
MATLAB was used to verify the results by plotting the step response of the system, which shows a %OS of 15.4 and other parameters as well. The calculation steps and MATLAB codes and responses are as shown in the results.
14

Conclusion
This assignment was successfully performed the dominant poles, the compensator zero and the gain of the first system where calculated after which MATLAB was used to simulate and verify the results to be correct as specified, the step response shows that the compensated system has a smaller Ts.
The frequency response based design required evaluation the value of the gain, k, to yield a step response with a 15% percentage overshoot OS%. This was achieved by calculations using the Bode plot from the MATLAB simulation and the step response plot shows the %OS to be 15.4% is a very close approximate of what was specified.
Therefore, the assignment on design via root locus and frequency response has been studied, understood and completed with the results as shown above.
References
Amri Zanal., 2011. Lecture notes/lab manuals, Control System Design (EE3005), Stamford College. Unpublished.
Edinburgh, 2011. Module 1.2: Control Systems. [online] Available at: < http://eweb.chemeng.ed.ac.uk/courses/control/restricted/course/second/course/lecture2.html> [Accessed 8 December, 2011 ].
Wikipedia, 2011. Bode plot. [online] Available at: < http://en.wikipedia.org/wiki/Bode_plot> [Accessed 8 December, 2011 ].
Michigan, 2011. Frequency Response Analysis and Design Tutorial. [online] Available at: < http://www.engin.umich.edu/group/ctm/freq/freq.html> [Accessed 8 December, 2011 ].
E. J. Mastascusa, 2011. An Introduction To The Root Locus. [online] Available at: <http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/RootLocus/RLocus1A.html#Predicting Performance> [Accessed 8 December, 2011 ].
15