Embed Size (px)
Citation preview

Abstract— En este proyecto se desarrollaron varios indicadores de estado de salud para engranajes y rodamientos basados en medidas de vibración procedentes de un ensayo experimental de dos turbinas eólicas (dañada y en buen estado). Se procesaron las señales y se extrajeron características, tanto temporales como en dominio de frecuencia, para modelar los conjuntos de datos de referencia para funcionamiento óptimo en cada eje. Se utilizaron técnicas de minería de datos para la elaboración de dos modelos de referencia, basados en mapas auto-organizados (SOM) y modelo mixto gaussiano (GMM). Se definieron indicadores de estado para cada modelo, cuyo desempeño se evaluó en base a datos procedentes de la turbina dañada.
Palabras clave— Aerogenerador, análisis de vibraciones, engranaje, rodamientos, Self-Organizing Maps, Gaussian Mixture Model.
I. INTRODUCCIÓN Uno de los rasgos característicos de las energías renovables
en general, y de la generación eólica en particular, es el alto coste de mantenimiento. Los aerogeneradores actuales están diseñados para trabajar alrededor de 120.000 horas de operación a lo largo de un tiempo de vida de unos 20 años. En término medio, los costes asociados a su mantenimiento suponen una pequeña fracción de la inversión total, en torno al 3 %.
Aunque el tipo de fallo y su naturaleza varía enormemente en un aerogenerador, las averías de naturaleza mecánica tienen una mayor incidencia en el tiempo de inactividad[1]. Los requerimientos básicos para la supervisión de turbinas eólicas han sido frecuentemente formulados (GL 2013[2]) en base a la condición de sus componentes rotativos (cadena de transmisión, engranajes y rodamientos), considerándose el estado de éstos como suficientemente representativos del estado de salud de la máquina. Así, la industria eólica actual se centra en el mantenimiento predictivo basado en la medición de vibraciones, cuya utilidad ha sido probada en la práctica y se ha convertido en el equipamiento de mantenimiento estándar.
Actualmente, el estado del arte para la caracterización de
señales de vibración cubre un gran número de técnicas, ya sean en dominio del tiempo (parámetros estadísticos, promediado síncrono) como en dominio de la frecuencia (FFT, análisis de órdenes, análisis de la envolvente, análisis cepstrum, entre otros), los cuales resultan especialmente útiles en la detección de defectos de engrane y de rodamientos[3].
Por otro lado, técnicas más avanzadas relativas al
mantenimiento predictivo tienen su origen en algoritmos de aprendizaje automático (machine learning), cuya aplicación permite predecir potenciales fallos. Estos pueden resumirse en dos tipos: supervisados (árboles de decisión, K-Nearest Neighbors, Support Vector Machine, etc) y no supervisados (k-means, GMM, SOM, etc). Todos ellos han sido ampliamente utilizados en la monitorización de turbinas eólicas y resultado de gran utilidad en el diagnóstico de defectos.
II. OBJETIVOS El objetivo del proyecto es desarrollar un método capaz de
identificar el estado de salud de un aerogenerador a partir de medidas de vibraciones en puntos clave de su estructura.
Se exploraron diversas técnicas de minería de datos, basadas en algoritmos no supervisados, para caracterizar el comportamiento de un aerogenerador en buen estado. En concreto se aplicaron algoritmos como k-means, SOM y GMM, cuyos parámetros se optimizaron en base al grado de ajuste sobre los datos extraídos. Por cada modelo y en base a datos experimentales, se elaboró un indicador de salud que permite determinar tanto el origen como la severidad del fallo.
El seguimiento de éstos indicadores de comportamiento podrá usarse para reducir los tempos de detección de fallos y/o reajustar el plan de mantenimiento previsto en los componentes monitorizados. El diagrama de bloques del método propuesto se muestra en Figura 1.
Figura 1. Diagrama de bloques del método propuesto.
III. CASO DE ESTUDIO El estudio se basa en un conjunto de datos proporcionados
por National Renewable Energy Laboratory (NREL)[4]. Las turbinas estudiadas proceden de dos aerogeneradores de regulación stall de 750 kW de tres palas con la misma
Detección de anomalías en aerogeneradores mediante el estudio de vibraciones
Autor: Martínez Montaña, Miguel Director: Sanz Bobi, Miguel Ángel
Entidad Colaboradora: ICAI – Universidad Pontificia Comillas

estructura: eje principal de baja velocidad, caja elevadora, eje de alta velocidad y generador. El estudio se centra en la multiplicadora cuya configuración interna se divide en cuatro ejes (PLC, LS, IMS y HS) y tres etapas de aumento (Figura 2).
Figura 2. Esquema de la turbina.
Input (rpm) Output (rpm) Potencia (%) Duración 22.09 1800 50 10 min
Tabla 1. Condiciones de ambos ensayos.
Los datos se extrajeron con 8 acelerómetros de dos ensayos de 10 min, uno en funcionamiento normal (healthy) y otro de una turbina defectuosa (damaged). Se dispone de la descripción de sus componentes (engranajes, rodamientos), de las condiciones de los ensayos así como los defectos existentes en la turbina dañada. En base a ellos se calcularon las frecuencias características de giro (SF), de engrane (GMF) y de rodamientos (BPI, BPO, BS).
IV. METODOLOGÍA
A. Procesado de señales Se exploró la utilización del promediado síncrono (TSA), el
cual presentó varios inconvenientes, por lo que se utilizaron finalmente filtros comb para filtrar armónicos de SF y GMF [5].
Se estudió la envolvente de la señal temporal mediante la técnica de filtrado espectral para el diagnóstico de rodamientos. La implementación del curtograma [6] resultó de gran utilidad para determinar las bandas de frecuencia óptimas para detección de BPI, BPO y BS. El procesado se realizó sobre tamos de igual longitud, en cada una de las 8 señales disponibles sobre los que se obtuvieron señal filtrada (𝑥"#$) y residual (𝑑"#$) a GMF y envolvente filtrada en el ancho de banda óptimo (𝑒($)(ver Figura 3).
Figura 3. Procesado de la señal bruta.
B. Extracción de características Se calcularon en total trece características en total: siete
procedentes de 𝑥"#$(junto con 𝑑"#$) y seis de 𝑒($ respectivamente (ver Tabla 2). Las características #1, 2, 3 y #8,
9, 10 son parámetros estadísticos que describen la señal en el dominio del tiempo. Las #5, 6, 7 son indicadores de estado ampliamente utilizados en la literatura para detectar defectos de engrane.
# Nombre Definición
Diagnóstico de
engranajes
1 Valor eficaz (𝑟𝑚𝑠) 𝑥"#$ 𝑡 -
.
/01
2 Curtosis (𝑘𝑢𝑟𝑡)
𝑚4(𝑥"#$)𝑚- 𝑥"#$ -
3 Factor de cresta (𝐶𝐹)
max 𝑥"#$ − min (𝑥"#$) 𝑟𝑚𝑠(𝑥"#$)
4
Potencia espectral a
GMF (𝑃𝑆"#$)
10 log 𝑃𝑅"#$[𝑘]I
J01
∀𝑘 𝑚ú𝑙𝑡𝑖𝑝𝑙𝑜 𝑑𝑒 𝐺𝑀𝐹
5 𝐹𝑀0 max 𝑥"#$ − min (𝑥"#$)
𝑋"#$[𝑘]I1
∀𝑘 𝑚ú𝑙𝑡𝑖𝑝𝑙𝑜 𝑑𝑒 𝐺𝑀𝐹
6 𝐹𝑀4 𝑚4(𝑑"#$)𝑚- 𝑑"#$ -
7 Energy Ratio (𝐸𝑅)
𝑟𝑚𝑠 𝑑"#$𝑟𝑚𝑠(𝑥"#$)
Diagnóstico de
rodamientos
8 Asimetría de Fisher (𝑠𝑘)
𝑚V(𝑒($)𝜎 𝑒($ V
9 Curtosis (𝑘𝑢𝑟𝑡)
𝑚4(𝑒($)𝑚- 𝑒($ -
10 Factor de cresta (𝐶𝐹)
max 𝑒($ − min (𝑒($) 𝑟𝑚𝑠(𝑒($)
11 Potencia
espectral a BPI (𝑃𝑆(XY)
10 log 𝑃𝑅(XY[𝑘]I
J01
∀𝑘 𝑚ú𝑙𝑡𝑖𝑝𝑙𝑜 𝑑𝑒 𝐵𝑃𝐼
12 Potencia
espectral a BPO (𝑃𝑆(X\)
10 log 𝑃𝑅(X\[𝑘]I
J01
∀𝑘 𝑚ú𝑙𝑡𝑖𝑝𝑙𝑜 𝑑𝑒 𝐵𝑃𝑂
13 Potencia
espectral a BS (𝑃𝑆(^)
10 log 𝑃𝑅(^[𝑘]I
J01
∀𝑘 𝑚ú𝑙𝑡𝑖𝑝𝑙𝑜 𝑑𝑒 𝐵𝑆
𝑚_ 𝑥 = 1
.𝑥 𝑡 − 𝑥 _.
/01 es el momento i-ésimo respecto de la media, 𝜎 𝑥 = .
.a1𝑚-(𝑥) la
desviación típica; 𝑆𝐹, 𝐺𝑀𝐹, 𝐵𝑃𝐼, 𝐵𝑃𝑂, 𝐵𝑆 las frecuencias de giro, de engrane, de defecto interior, exterior y de elemento rodante; y 𝑋[𝑘] la amplitud de FFT de 𝑥[𝑡] a frecuencia 𝑘. 𝑃𝑅 se describe en la sección siguiente.
Tabla 2. Características extraídas.
Las características #4,11,12,13 se basaron en el cálculo promediado de FFT con ventana Hamming y solapamiento 50%. El indicador de salud utilizado se basa en la fórmula siguiente:
𝑃𝑅c 𝑓 =𝑋 𝑓 -
∆fg𝑅 𝑓 -
∆fh, ∆𝑓1 = 0.03𝑓, ∆𝑓- = 𝛼∆𝑓1
donde 𝑋 𝑓 y 𝑅 𝑓 representa las magnitud de la señal de estudio y la residual (tras eliminar las componentes contenidas en ∆𝑓1) a la frecuencia 𝑓, con 𝛼 = 5. La resolución espectral se ajustó lo máximo posible, obteniendo finalmente ±4Hz y 600 tramos de señal.
C. Selección de características y PCA Se obtuvieron 8 conjuntos de características, uno por sensor,
cada uno compuesto de 600 observaciones y 13 variables, para cada ensayo (healthy, damaged). Estos se normalizaron restando la media y dividiendo por la desviación típica del conjunto healthy (z-scores). Para cada eje se elaboraron dos conjuntos de datos, uno para el diagnóstico de engranajes (variables #1-7) y otro para el de rodamientos (variables #8-13) respectivamente. En cada conjunto se aplicó un filtrado por correlación mutua y finalmente se aplicó análisis de
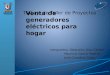
componentes principales (PCA) para reducir la dimensión[8]. El resultado aparece en Tabla 3.
Dataset Sensores
Variables por sensor
(#) Abrev. Dimensión
inicial Dimensión
final
Varianza recogida
(%)
PLC AN3, AN4, AN10
1-7 D11 21 9 80.32 8-13 D12 18 9 84.18
LS AN5 1-7 D21 7 3 82.92 8-13 D22 6 5 92.23
IMS AN6 1-7 D31 7 3 88.47 8-13 D32 6 4 87.26
HS AN7, AN8, AN9
1-7 D41 21 9 83.13 8-13 D42 18 10 80.65
Tabla 3. Conjuntos de entrenamiento.
D. Modelo basado en SOM Se ajustó un SOM [7] para cada conjunto de datos. Para la
estimación del número de nodos (K), se evaluó el desempeño del kmeans (suma de errores cuadrados con respecto a cada centroide, SSE) entre K=1 y 100 componentes, escogiendo el valor según la regla del codo.
Dataset D11 D12 D21 D22 D31 D32 D41 D42
K 12 15 25 17 16 15 11 12 Dimensiones
SOM 4x3 4x4 5x5 4x4 4x4 4x4 4x3 4x3
Tabla 4. Dimensiones del SOM para cada dataset.
Como indicador de estado, se utilizó la distancia al BMU (nodo más cercano) de cada observación, normalizada por la distancia máxima entre nodos.
𝐶𝐼 \# =𝑑𝑖𝑠𝑡 𝑥, 𝑤(#o
maxpq 𝑑𝑖𝑠𝑡 𝑤_, 𝑤r (1)
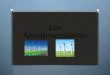
Utilizando la distancia euclídea y estudiando la distribución
del indicador, se observa cierta tendencia a una log-normal, lo que puede verificarse mediante un contraste Kolmogorov-Smirnov. Se realizó dicho test sobre la variable log (𝐶𝐼 \#s) aceptándose dicho ajuste con un nivel de significación 𝛼=0.05. Finalmente, se definió un umbral utilizando el percentil 95% de la distribución obtenida, de forma que cualquier observación mayor se consideró potencialmente anómala. En Tabla aparecen los p-valor del ajuste y el percentil 95 de cada distribución.
Figura 4.Ajuste de log-normal para el dataset D41.
Dataset D11 D12 D21 D22 D31 D32 D41 D42
p-val 0.124 0.810 0.112 0.809 0.059 0.119 0.459 0.556 p95 1.142 0.326 0.322 0.697 0.137 0.252 0.828 0.467
Tabla 5. P-valor y umbrales resultantes del ajuste.
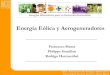
A parte de esto, se exploró el uso de un indicador probabilístico basado en el SOM, que finalmente fue sustituido por el GMM.
E. Modelo basado en GMM
Se elaboró un modelo de referencia mediante estimación de densidad ajustando un modelo GMM [8] para cada conjunto de datos. El número de componentes se seleccionó mediante criterios BIC y de validación cruzada (con 12.5% de los datos), evitando el sobreajuste. Este último se volvió a utilizar para obtener el modelo final (con 10% de los datos), el cual se validó calculando el ratio de observaciones recogidas en el 95% de la función de densidad (𝑅tu%).
Figura 5. Desempeño de GMM entre 1 y 20 componentes para D41.
Dataset D11 D12 D21 D22 D31 D32 D41 D42
K 1 3 3 1 4 2 2 3 𝑻𝒆𝒔𝒕 𝐥𝐨𝐠 𝓛 926.081 879.444 328.653 449.869 362.916 352.528 902.851 908.157
𝑹𝟗𝟓% 0.927 0.935 0.958 0.950 0.965 0.942 0.945 0.931
Tabla 6. Parámetros del GMM en cada dataset.
El indicador de salud se definió en base a la función de densidad obtenida en el modelo, 𝑝(𝑥), según la Ecuación 2. De esta forma, para observaciones alejadas del estado de funcionamiento óptimo, 𝑝(𝑥) decrecerá aumentando el valor de 𝐶𝐼"##.
𝐶𝐼"## = − log𝑝 𝑥
𝑚𝑎𝑥� 𝑝 𝑥 (2)
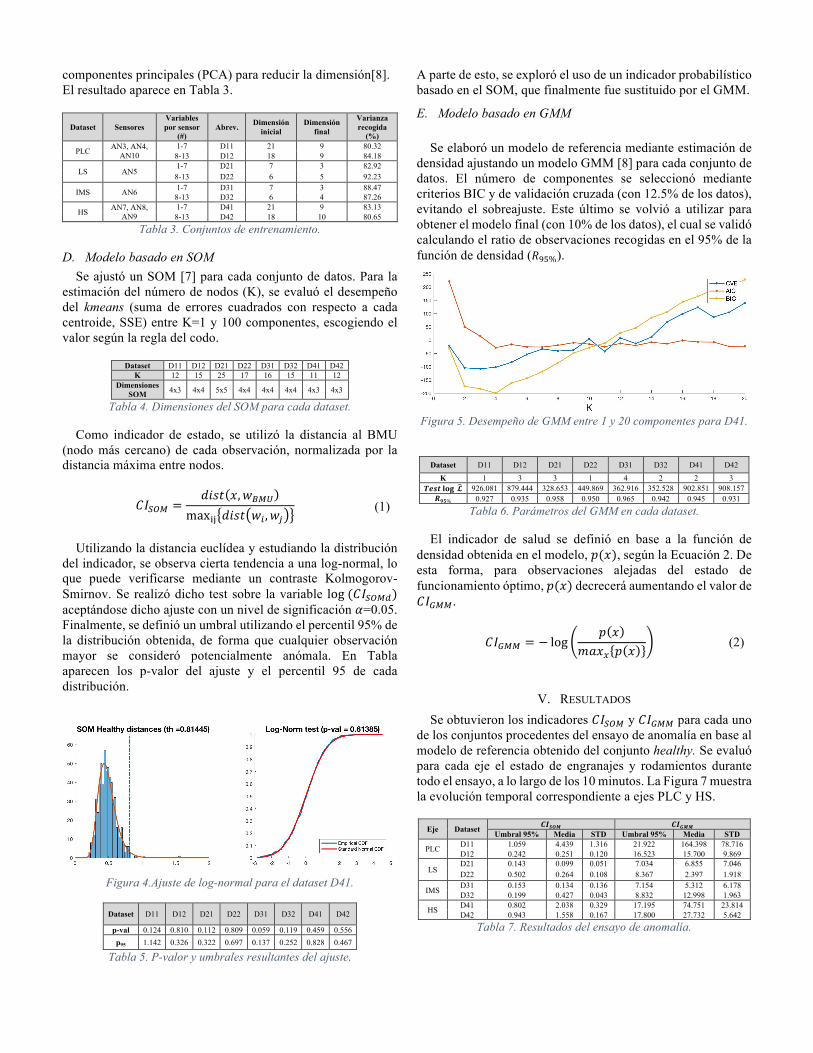
V. RESULTADOS Se obtuvieron los indicadores 𝐶𝐼 \# y 𝐶𝐼"## para cada uno
de los conjuntos procedentes del ensayo de anomalía en base al modelo de referencia obtenido del conjunto healthy. Se evaluó para cada eje el estado de engranajes y rodamientos durante todo el ensayo, a lo largo de los 10 minutos. La Figura 7 muestra la evolución temporal correspondiente a ejes PLC y HS.
Eje Dataset 𝑪𝑰𝑺𝑶𝑴 𝑪𝑰𝑮𝑴𝑴
Umbral 95% Media STD Umbral 95% Media STD
PLC D11 1.059 4.439 1.316 21.922 164.398 78.716 D12 0.242 0.251 0.120 16.523 15.700 9.869
LS D21 0.143 0.099 0.051 7.034 6.855 7.046 D22 0.502 0.264 0.108 8.367 2.397 1.918
IMS D31 0.153 0.134 0.136 7.154 5.312 6.178 D32 0.199 0.427 0.043 8.832 12.998 1.963
HS D41 0.802 2.038 0.329 17.195 74.751 23.814 D42 0.943 1.558 0.167 17.800 27.732 5.642
Tabla 7. Resultados del ensayo de anomalía.

(a) (c)
(b) (d)
Figura 6. Indicadores de salud obtenidos de conjuntos D11(a), D12(b) (eje PLC), D41(c), D42(d) (eje HS).
(a) (b) (c) (d)
Figura 7. Diagrama de dispersión con valores de 𝐶𝐼"## procedentes de cada par de datasets de PLC (a), LS (b), IMS (c) y HS (d).
La Figura 7 muestra la comparación del estado de los componentes en base al indicador 𝐶𝐼"##. En base al ensayo y de forma cualitativa, se puede concluir por tanto, en la existencia de defectos graves y constantes en el engrane de PLC y de HS, mientras que los principales defectos en los rodamientos proceden del eje IMS y HS.
De la evaluación experimental de la turbina dañada, pueden extraerse varias conclusiones, resumidas a continuación. • El diagnóstico realizado es orientativo, se estima la
severidad del fallo con cada indicador, en base a él se pueden explorar indicadores más precisos, o revisar el estado del componente en caso de grandes desviaciones. En caso de mayor histórico de datos, puede proporcionarse un análisis de tendencia, o localizar momentos de rotura.
• Los indicadores solo son comparables cuando proceden del mismo conjunto de datos, pues en caso contrario están basados en mediciones totalmente distintas. En cualquier caso, para un conjunto concreto, la estimación del defecto es similar en ambos indicadores.
• Desalineaciones, excentricidades, y otros defectos pueden verse reflejados en estos especialmente en los indicadores de engrane, al tratar estos la señal filtrada en armónicos de GMF (que a su vez son armónicos de giro). En cualquier caso, la detección de estos fallos es en general, mucho más
simple. Asimismo, armónicos de GMF pueden influir en el filtrado por curtosis espectral.
• En ejes de baja velocidad (i.e. PLC), la estimación espectral puede ser peor, al ser las frecuencias de estudio cercanas a la resolución de FFT (2Hz), lo que puede influir en el valor de los indicadores calculados.
VI. CONCLUSIONES Los indicadores obtenidos resultan ser útiles y detectan las
principales anomalías presentes en la turbina dañada. El método propuesto presenta, no obstante, algunas limitaciones: • Punto de operación único. Los ensayos se realizaron a
velocidad constante, por lo que los resultados obtenidos son válidos para un punto de operación (velocidad del eje HSS de 1200 rpm). No obstante, la aplicación de promediado síncrono anterior a la extracción de características resuelve de forma efectiva este problema.
• Corta duración del ensayo. El presente estudio ha estado limitado en todo momento por el corto intervalo de tiempo del que se ha dispuesto (10 min). Esto se ha traducido en la búsqueda de un compromiso para obtener una resolución espectral en cada tramo de señal manteniendo un suficiente número de observaciones. De haber dispuesto de más muestras, no habrían existido dicho problema.
• Monitorización muy específica. Se trata de un método válido para turbinas de similares a las estudiadas, con la

misma configuración de sensores. Por tanto, éste sería justificable para parques eólicos con gran número de aerogeneradores del mismo modelo. En otro caso, un modelo para cada uno sería necesario.
• Defectos no aislados. Los resultados obtenidos del ensayo de anomalía revelan, en general, una desviación grande ya que la turbina presentaba múltiples roturas al mismo tiempo. Para una mejor verificación de los indicadores propuestos, sería deseable disponer de ensayos con defectos aislados para un mismo componente.
En cualquier caso, se ha comprobado la utilidad de los
indicadores de salud propuestos, la cual es la principal aportación del presente trabajo. Las ventaja de estos puede resumirse en que unifica toda la información correspondiente al estado de un eje de la cadena de transmisión de una turbina y estima el grado de severidad de potenciales defectos, en base al estado de referencia. El objetivo de dichos indicadores no es otro que facilitar el mantenimiento predictivo de las turbinas y ajustar los tiempos de detección de fallos en los componentes.
AGRADECIMIENTOS El estudio realizado en este proyecto se basa en datos proporcionados por National Renewable Energy Laboratory (NREL), CO 80401 USA.
REFERENCIAS
[1] F. Spinato, P.J. Tavner, G.J.W. Van Bussel, E. Koutoulakos, Reliability of wind turbine subassemblies, IET Renewable Power Generation, 2008.
[2] Germanischer Lloyd (GL), Guideline for the Certification of Condition Monitoring Systems for Wind Turbines , 2013
[3] D. Coronado, K. Fischer, Condition Monitoring of Wind Turbines:
State of the Art, User Experience and Recomendations, Institute for Wind Energy and Energy System, Germany, 2015.
[4] S. Sheng, Wind Turbine Gearbox Vibration Condition Monitoring
Benchmarking Datasets. National Renewable Energy Laboratory, 2013.
[5] P.D. MacFadden, M.M. Toozhy, Application of Time Synchronous
Averaging to vibration monitoring of rolling element bearings, University of Oxford, 2000.
[6] J. Antoni, Fast computation of the kurtogram for detection of
transient faults, Université de Technologie de Compiègne, 2005.
[7] T. Kohonen, MATLAB Implementations and Applications of the Self-Organizing Map, Aalto University, School of Science, 2014.
[8] T. Herlau, M.N. Schmidt, M. Mørup, Introduction to Machine
Learning and Data Mining, Technical University of Denmark, 2016.

Abstract— In this project several health indicators for wind turbines have been developed. Based on vibration data driven from two experimental turbines (damaged and healthy), those indicators capture the bearing and gear condition of the gearbox. Signal processing and feature extraction was carried out –on both time and frequency domain– from raw data in order to generate datasets for each shaft. Based on good condition data, data mining approach was used two build two reference models, based on Self-Organizing Maps (SOM) and Gaussian Mixture Models (GMM). The health indicators were defined from healthy turbine data, whose performance was tested in damaged data.
Keywords— Wind turbine, vibration analysis, gearbox, bearing, Self-Organizing Maps, Gaussian Mixture Model.
I. INTRODUCTION One of the most defining feature of renewable energies in
general, and more particular, wind generation, is the high maintenance cost. Current wind turbines are designed to work around 120 000 hours a year, throughout a 20-year lifetime. On average, associate costs with maintenance imply a small proportion of total investment (around 3%).
Although failure type and nature ranges widely, mechanical
turbine damages have greater incidence on downtime periods[1] than other fault type. Basic requirements for wind turbines supervision have been usually formulated (GL 2013[2]) based on their rolling elements condition (drivetrain, gears and bearings). In fact, those are considered to be enough representative of the turbine’s health condition. Hence, present wind industry focuses on predictive vibration-based maintenance, whose utility has been experimentally proven and has turned into standard turbine equipment.
Currently, vibration signal characterization state-of-art
covers a wide number of techniques, on both time domain (statistical parameters, synchronous averaging) and frequency domain (Fourier Transforms, order analysis, envelope analysis, cepstrum, etc), whom turn out to be particularly useful for bearing and gear damages[3].
On the other hand, advanced techniques related to predictive
maintenance are based on machine learning algorithms, whose application allows to predict potential faults. Those can may be summarized in two types: supervised (decision trees, K-Nearest Neighbors, Support Vector Machine, etc) and non-supervised
(k-means, GMM, SOM, etc). All of them have been broadly used in wind turbine condition monitoring and prognostics
II. OBJECTIVES The main objective of this project is to develop a method able
to identify the wind turbine health condition based on vibration measurements from key point of its structure.
Several data mining non-supervised techniques have been
explored to depict the good condition behavior. The proposed algorithms were k-means, SOM and GMM, whose parameters were planned to be optimized based on the degree of fitness on extracted data. For each model, a health indicator is defined, which has to measure both fault location and severity.
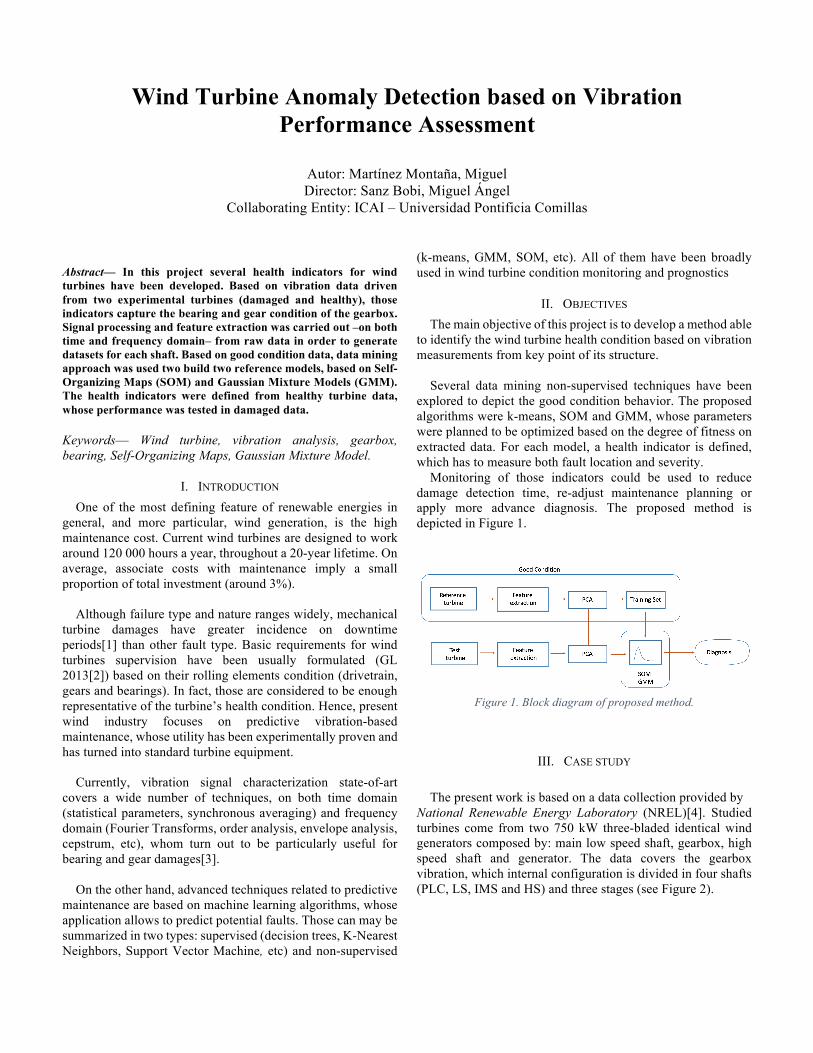
Monitoring of those indicators could be used to reduce damage detection time, re-adjust maintenance planning or apply more advance diagnosis. The proposed method is depicted in Figure 1.
Figure 1. Block diagram of proposed method.
III. CASE STUDY The present work is based on a data collection provided by
National Renewable Energy Laboratory (NREL)[4]. Studied turbines come from two 750 kW three-bladed identical wind generators composed by: main low speed shaft, gearbox, high speed shaft and generator. The data covers the gearbox vibration, which internal configuration is divided in four shafts (PLC, LS, IMS and HS) and three stages (see Figure 2).
Wind Turbine Anomaly Detection based on Vibration Performance Assessment
Autor: Martínez Montaña, Miguel Director: Sanz Bobi, Miguel Ángel
Collaborating Entity: ICAI – Universidad Pontificia Comillas

Figure 2. Turbine diagram.
Input (rpm) Output (rpm) Power (%) Duration 22.09 1800 50 10 min
Table 1. Experiment test conditions.
Data was collected by 8 accelerometers from two similar 10 minute tests, (one from healthy turbine, the other from damaged one). Description of all gearbox components (gears, bearings), accelerometers, test conditions and actual turbine faults were provided. Based on them, characteristic shaft (SF), gear mesh (GMF) and rolling (BPI, BPO, BS) frequencies were calculated.
IV. METHODOLOGY
A. Signal processing Use of time synchronous averaging (TSA) was initially
studied as first option. However, several issues were encountered: short time length, odd gear ratios and lack of tachometer from damaged test. Thus, comb filters were finally used to filter out SF and GMF harmonics [5]. Envelope analysis was carried out for bearing diagnosis by means of spectral kurtosis filtering. Kurtogram implementation [6] was useful to determine those frequency bands more likely to have BPI, BPO and BS impulses.
Processing was implemented in equal length signal portions on each one of the 8 available signals. The obtained signals were GMF filtered and residual (𝑥"#$, 𝑑"#$) and its harmonics, and filtered envelope at optimum band given by kurtogram (𝑒)$). Figure 3 summarizes all those signals.
Figure 3. Raw signal processing.
B. Feature extraction Thirteen features were computed in total, seven from
𝑥"#$(combined with 𝑑"#$) and six from 𝑒)$ respectively (see Table 2). Features #1, 2, 3 and #8, 9, 10 are time domain statistical parameters. Features #5, 6, 7 are condition indicators widely used to detect gear mesh defects.
# Name Equation
Diagnóstico de
engranajes
1 Root mean square (𝑟𝑚𝑠) 𝑥"#$ 𝑡 .
/
012
2 Kurtosis (𝑘𝑢𝑟𝑡) 𝑚5(𝑥"#$)𝑚. 𝑥"#$ .
3 Crest Factor (𝐶𝐹)
max 𝑥"#$ − min (𝑥"#$) 𝑟𝑚𝑠(𝑥"#$)
4 Spectral Power at GMF (𝑃𝑆"#$) 10 log 𝑃𝑅"#$[𝑘]
J
K12
∀𝑘 𝐺𝑀𝐹 𝑚𝑢𝑙𝑡𝑖𝑝𝑙𝑒
5 𝐹𝑀0 max 𝑥"#$ − min (𝑥"#$)
𝑋"#$[𝑘]J2
∀𝑘 𝐺𝑀𝐹 𝑚𝑢𝑙𝑡𝑖𝑝𝑙𝑒
6 𝐹𝑀4 𝑚5(𝑑"#$)𝑚. 𝑑"#$ .
7 Energy Ratio (𝐸𝑅)
𝑟𝑚𝑠 𝑑"#$𝑟𝑚𝑠(𝑥"#$)
Diagnóstico de
rodamientos
8 Fisher
Skewedness (𝑠𝑘)
𝑚U(𝑒)$)𝜎 𝑒)$ U
9 Kurtosis (𝑘𝑢𝑟𝑡) 𝑚5(𝑒)$)𝑚. 𝑒)$ .
10 Crest Factor (𝐶𝐹)
max 𝑒)$ − min (𝑒)$) 𝑟𝑚𝑠(𝑒)$)
11 Spectral Power at BPI (𝑃𝑆)WX)
10 log 𝑃𝑅)WX[𝑘]J
K12
∀𝑘 𝐵𝑃𝐼 𝑚𝑢𝑙𝑡𝑖𝑝𝑙𝑒
12 Spectral Power at BPO (𝑃𝑆)W[) 10 log 𝑃𝑅)W[[𝑘]
J
K12
∀𝑘 𝐵𝑃𝑂 𝑚𝑢𝑙𝑡𝑖𝑝𝑙𝑒
13 Spectral Power at BS (𝑃𝑆)]) 10 log 𝑃𝑅)][𝑘]
J
K12
∀𝑘 𝐵𝑆 𝑚𝑢𝑙𝑡𝑖𝑝𝑙𝑒
𝑚^ 𝑥 = 2
/𝑥 𝑡 − 𝑥 ^/
012 is i-th central moment, 𝜎 𝑥 = /
/`2𝑚.(𝑥) the standard deviation;
𝑆𝐹, 𝐺𝑀𝐹, 𝐵𝑃𝐼, 𝐵𝑃𝑂, 𝐵𝑆 represent shaft, gear mesh, inner defect, outer defect and rolling element frequency respectively; 𝑋[𝑘] is the FFT amplitude of 𝑥[𝑡] at frequency 𝑘. 𝑃𝑅 is described below.
Table 2. List of extracted features.
Features #4,11,12,13 were based on the averaged FFT, windowed by Hamming function with 50% overlap. The below equation describes the condition ratio used to measure energy spectrum frequency peaks:
𝑃𝑅a 𝑓 =𝑋 𝑓 .
∆de𝑅 𝑓 .
∆df, ∆𝑓2 = 0.03𝑓, ∆𝑓. = 𝛼∆𝑓2
where 𝑋 𝑓 and 𝑅 𝑓 represent studied signal and residual signal (after removing all frequency magnitudes contained in ∆𝑓2) respectively, at frequency 𝑓. Parameter 𝛼 was set at 5. Spectral resolution was adjusted as best as possible, obtaining finally ±4Hz with 600 signal portions.
C. Feature selection and PCA Eight feature datasets were obtained one per sensor,
composed by 600 observations and 13 variables, for each test (healthy, damaged). Data was normalized by means of z-scores of healthy dataset, since they had different scales.

Data was split and rearranged, so that for each shaft, two datasets were generated: gear diagnosis (variables #1-7) and bearing diagnosis (variables #8-13) respectively. Each dataset was filtered by mutual correlation and finally principal component analysis was carried out to reduce dimensionality [8]. Final datasets appear summarized below in Table 3.
Dataset Sensors Variables per sensor
(#) Abrev. Initial
Dimension Final
Dimension
Explained Variance
(%)
PLC AN3, AN4, AN10
1-7 D11 21 9 80.32 8-13 D12 18 9 84.18
LS AN5 1-7 D21 7 3 82.92 8-13 D22 6 5 92.23
IMS AN6 1-7 D31 7 3 88.47 8-13 D32 6 4 87.26
HS AN7, AN8, AN9
1-7 D41 21 9 83.13 8-13 D42 18 10 80.65
Table 3. Training datasets.
D. SOM-based model A self organizing map was adjusted on each dataset [7].
Number of nodes (K) was estimated by running k-means performance from K = 1 to 100, measuring the total sum of squared errors with respect to each centroid (SSE). According to elbow rule, the value of K was chosen. Results are listed in Table 4.
Dataset D11 D12 D21 D22 D31 D32 D41 D42
K 12 15 25 17 16 15 11 12 SOM Dimensions 4x3 4x4 5x5 4x4 4x4 4x4 4x3 4x3
Table 4. SOM dimensions for each dataset.
As health indicator, BMU (Best Matching Unit) distance was computed on each observation, divided by maximum Euclidean distance among all nodes (Eq.1).
𝐶𝐼][# =𝑑𝑖𝑠𝑡 𝑥, 𝑤)#l
maxmn 𝑑𝑖𝑠𝑡 𝑤^, 𝑤o (1)
Focusing on training distance distributions, certain log-
normal tendency was found on every model. A Kolmogorov-Smirnov test was carried out on distribution of variable log (𝐶𝐼][#p), checking out normality tendency with signification of 𝛼=0.05. Finally, a threshold was defined at percentile 95% of fitted distribution, so that each observation outside this limit was considered potentially anomalous. Table 5 summarizes p-values and thresholds of each test.
Figure 4.Log Normal test on dataset D41.
Dataset D11 D12 D21 D22 D31 D32 D41 D42
p-val 0.124 0.810 0.112 0.809 0.059 0.119 0.459 0.556 p95 1.142 0.326 0.322 0.697 0.137 0.252 0.828 0.467
Table 5. Resulting p-values and thresholds from log normal test.
Apart from that, a probabilistic SOM-based health indicator was also tested, but finally replaced by GMM.
E. GMM-based model A reference probability model was fitted on each healthy
dataset by GMM density estimation [8]. The objective is to measure how likely new observations are based on well-functioning baseline. Number of components was selected by BIC, AIC and K-fold cross validation criterions (with 12.5% data fraction) to avoid overfitting. This last criterion was also used (with 10% of data fraction) to obtain final model, which was validated computing the ratio of observations included within 95% percent of density region (𝑅qr%).
Figure 5. GMM performance among 1 and 20 components on dataset
D41.
Dataset D11 D12 D21 D22 D31 D32 D41 D42
K 1 3 3 1 4 2 2 3 𝑻𝒆𝒔𝒕 𝐥𝐨𝐠 𝓛 926.081 879.444 328.653 449.869 362.916 352.528 902.851 908.157
𝑹𝟗𝟓% 0.927 0.935 0.958 0.950 0.965 0.942 0.945 0.931
Table 6.GMM parameters for each dataset.
Health indicator was defined based on density function obtained, 𝑝(𝑥), according to Equation 2. Thus, distant data points from optimum behavior will have low values of 𝑝(𝑥), so 𝐶𝐼"## will increase.
𝐶𝐼"## = − log𝑝 𝑥
𝑚𝑎𝑥� 𝑝 𝑥 (2)
V. RESULTS Both 𝐶𝐼][# and 𝐶𝐼"## were obtained from each damaged
datasets, based on previous reference healthy SOM and GMM models.Thus, for each shaft, the status of gears and bearings was evaluated along all the 10 minute test. Figure 7 shows their temporal evolution corresponding to shafts PLC and HS.
Shaft Dataset
𝑪𝑰𝑺𝑶𝑴 𝑪𝑰𝑮𝑴𝑴 Threshold
95% Mean STD Threshold 95% Mean STD
PLC D11 1.059 4.439 1.316 21.922 164.398 78.716 D12 0.242 0.251 0.120 16.523 15.700 9.869
LS D21 0.143 0.099 0.051 7.034 6.855 7.046 D22 0.502 0.264 0.108 8.367 2.397 1.918
IMS D31 0.153 0.134 0.136 7.154 5.312 6.178 D32 0.199 0.427 0.043 8.832 12.998 1.963
HS D41 0.802 2.038 0.329 17.195 74.751 23.814 D42 0.943 1.558 0.167 17.800 27.732 5.642
Table 7. Damaged turbine test results.

(a) (c)
(b) (d)
Figure 6. Health indicators on datasets D11(a), D12(b) (PLC shaft), D41(c), D42(d) (HS shaft).
(a) (b) (c) (d)
Figure 7. Scatter plot with 𝐶𝐼"## values from each pair of datasets of PLC (a), LS (b), IMS (c) y HS (d).
Figure 7 compares the components condition based on 𝐶𝐼"## values. Qualitatively, one could conclude that there are actually constant and major faults on gears from PLC and HS, and principal bearing faults come from IMS and HS shafts. From this experimental evaluation of damaged turbine, some conclusions can be remarked: • The diagnosis is mainly indicative; failure severity is
estimated. Based on those indicators, more specific techniques could be explored, or components could be revised in case of grater deviations.
• In case of more data available, trend analysis can be directly implemented, as well as localize fault events.
• Those indicators are only comparable when coming from same dataset; on contrary they are based on totally different measurements. Either way, defect estimation appears to be similar with both indicators.
• Shaft misalignments, eccentricities and other damages could be reflected in those indicators, specially on gear based ones, since they come from GMF harmonics filtered signal, which they are likewise shaft harmonics. In any case, those failures are in general much easier to identify.
• In low speed shafts (i.e. PLC), spectral estimation could be worse, since their characteristic frequencies are closer to FFT resolution, which may corrupt the resulting indicators.
VI. CONCLUSIONS It has been proven obtained condition indicators detect main
present anomalies from damaged gearbox. However, proposed method exhibits some limitations:
• Single operating point. Provided tests were performed on
constant speed, so obtained results are worthwhile for only one working regime (HS speed at 1200 rpm). Nevertheless, application of TSA prior to feature extraction solves effectively this issue.
• Short time length. This study has been limited at every turn by small amount of data (10 min). This has been translated into a trade-off solution to obtain admissible spectral resolution and enough number of data points. If more data was available, this would have never been a problem.
• Specific monitoring. This method is useful for similar wind turbines, with same internal distribution and sensor configuration. It would be justifiable in case of wind park with same model amount of turbines. Other way, one model per turbine would be necessary.
• Non isolated defects. Obtained results from damaged turbine reveal in general a great deviation in some shafts, due to multiple defects at same time. For better verification of proposed indicators, it would be desirable to make isolated defect data available.

In any case, usefulness of proposed method has been proven, which has been the principal contribution of this work. Main advantages achieved are the unification of all information corresponding to each shaft condition on the one hand, and estimation of the severity of tested failures on the other hand. The objective of those indicators is to facilitate predictive maintenance of wind turbines and adjust fault detection times on each component.
ACKNOWLEDGEMENT This project is based on data selfless provided by National Renewable Energy Laboratory (NREL), CO 80401 USA.
REFERENCES
[1] F. Spinato, P.J. Tavner, G.J.W. Van Bussel, E. Koutoulakos, Reliability of wind turbine subassemblies, IET Renewable Power Generation, 2008.
[2] Germanischer Lloyd (GL), Guideline for the Certification of Condition Monitoring Systems for Wind Turbines , 2013
[3] D. Coronado, K. Fischer, Condition Monitoring of Wind Turbines:
State of the Art, User Experience and Recomendations, Institute for Wind Energy and Energy System, Germany, 2015.
[4] S. Sheng, Wind Turbine Gearbox Vibration Condition Monitoring
Benchmarking Datasets. National Renewable Energy Laboratory, 2013.
[5] P.D. MacFadden, M.M. Toozhy, Application of Time Synchronous
Averaging to vibration monitoring of rolling element bearings, University of Oxford, 2000.
[6] J. Antoni, Fast computation of the kurtogram for detection of
transient faults, Université de Technologie de Compiègne, 2005.
[7] T. Kohonen, MATLAB Implementations and Applications of the Self-Organizing Map, Aalto University, School of Science, 2014.
[8] T. Herlau, M.N. Schmidt, M. Mørup, Introduction to Machine
Learning and Data Mining, Technical University of Denmark, 2016.