Embed Size (px)
Citation preview

[7] Nickel, U., Chaumette, E., and Larzabal, P.
Statistical performance prediction of generalized
monopulse estimation.
IEEE Transactions on Aerospace and Electronic Systems,
47, 1 (Jan. 2011), 381—404.
[8] Paine, A. S.
Minimum variance monopulse technique for an adaptive
phased array radar.
IEE Proceedings–Radar, Sonar and Navigation, 145, 6
(Dec. 1998), 374—380.
[9] Fante, R. L.
Synthesis of adaptive monopulse patterns.
IEEE Transactions on Antennas and Propagation, 47, 5
(May 1999), 773—774.
[10] Davis, R. M. and Fante, R. L.
A maximum-likelihood beamspace processor for
improved search and track.
IEEE Transactions on Antennas and Propagations, 49, 7
(July 2001), 1043—1053.
[11] Yu, K. B. and Murrow, D. J.
Adaptive digital beamforming for angle estimation in
jamming.
IEEE Transactions on Aerospace and Electronic Systems,
37, 2 (Apr. 2001), 508—523.
[12] Wu, J. X., Wang, T., and Bao, Z.
Fast realization of maximum likelihood angle estimation
with small adaptive uniform linear array.
IEEE Transactions on Antennas and Propagation, 58, 10
(Dec. 2010), 3951—3960.
[13] Goodman, N. A. and Stiles, J. M.
On clutter rank observed by arbitrary arrays.
IEEE Transactions on Signal Processing, 55, 1 (Jan. 2007),
178—186.
[14] Landau, H. J. and Pollak, H. O.
Prolate spheroidal wave functions, Fourier analysis
and uncertainty–III: The dimension of the space of
essentially time- and band-limited signals.
Bell System Technical Journal, 41, 4 (July 1962),
1295—1336.
Development of 3-D Modified ProportionalNavigation Guidance Law against High-SpeedTargets
The work presented here proposes a terminal guidance law
against very high-speed targets. Proportional navigation guidance
(PNG) is mostly effective for interceptors and targets with
ideal dynamics and constant speeds during the collision course,
however, it is nonrobust for the objects with nonconstant speeds,
such as the interceptor equipped with thrust-vector-control
(TVC). To resolve the problem the interceptor considered
here is guided by a 3-dimensional (3-D) modified proportional
navigation guidance (MPNG) law, which is developed to account
for the interceptor’s axial acceleration. The guidance law is
potentially applicable to interceptors with TVC to provide lateral
accelerations.
NOMENCLATURE
LOS Line of sight
(XI ,YI ,ZI) Reference coordinate system
(XL,YL,ZL) LOS coordinate system
(XM ,YM ,ZM) Interceptor body coordinate system
(XT,YT,ZT) Target body coordinate system
(iI,jI,kI) Unit vectors corresponding,
respectively, to (XI ,YI ,ZI) axes
(iL, jL,kL) Unit vectors corresponding,
respectively, to (XL,YL,ZL) axes
(iM, jM,kM) Unit vectors corresponding,
respectively, to (XM ,YM ,ZM) axes
(iT, jT,kT) Unit vectors corresponding,
respectively, to (XT,YT,ZT) axes
r Relative distance between
interceptor and target
μL,ÃL Euler angles from reference
coordinate system to LOS
coordinate system
μM ,ÃM Euler angles from LOS coordinate
system to interceptor’s body
coordinate system
μT,ÃT Euler angles from LOS coordinate
system to target’s body
coordinate system
Manuscript received September 9, 2010; revised April 15 and
October 6, 2011; released for publication July 23, 2012.
IEEE Log No. T-AES/49/1/944383.
Refereeing of this contribution was handled by M-J. Tahk.
This research was sponsored by Chung Shan Institute of Science
and Technology, Taiwan, ROC under Grant XB99086.
0018-9251/13/$26.00 c° 2013 IEEE
CORRESPONDENCE 677

Ám,°m,Ãm Euler angles (flight path angles)from reference coordinate systemto interceptor body coordinatesystem
°t,Ãt Euler angles (reentry angles) frominterceptor body coordinatesystem to reference coordinatesystem
°c,Ãc Flight path control commands
(xpip,ypip,hpip) Position of predict interception point(PIP) in reference coordinatesystem
(xm,ym,hm) Position of interceptor in referencecoordinate system
Smh(Sth) Distance from missile (target) to thecollision point C in LOSH plane
VM(VT) Interceptor (target) velocity vector
AM(AT) Interceptor (target) accelerationvector
ACM Acceleration command vector ofinterceptor
Acy(Acp) Yaw (pitch) acceleration commandof interceptor
tf Interceptor flight time
tgo Time-to-go
C The collision point of interceptorand target
D Drag force of the interceptorg Gravity accelerationL Lift force of the interceptorN Navigation gainT Thrust force of the interceptorW Target weightmfuel Propellant mass of the interceptor
tb Fuel burn time of the interceptor
® Angle-of-attack of the interceptor¯ Ballistic coefficient of the target½ Air densityCmD Drag coefficient of the interceptor
CmD0(CtD0) Zero-lift drag coefficient of theinterceptor (target)
CmL Lift coefficient of the interceptor
CmL®
= @CmL=@®
st Reference area of the target
( _̧ x,_̧y,_̧z) XL,YL,ZL components of the LOS
angular velocity vector(Vmx
L,Vmy
L,Vmz
L) XL,YL,ZL components of the
interceptor velocity (Vm)
(Vtx,Vty,Vth) XI ,YI ,HI components of the targetvelocity (Vt)
(Atx,Aty,Ath) XI ,YI ,HI components of the targetacceleration (At)
I. INTRODUCTION
The proportional navigation guidance (PNG)
law [1—3] has long been adopted in air-to-air
or surface-to-air homing missiles because of its
simplicity and effectiveness in defeating targets with
low maneuverability. However, facing very high-speed
ballistic targets, the traditional PNG law may not be
competent anymore. During the past few decades, a
variety of guidance design techniques, such as linear
quadratic regulator (LQR) [4], modified proportional
guidance [5], extended proportional navigation [6],
neural-fuzzy-based guidance [7—8], and geometric
control [9], have been widely attempted to deal with
the guidance design problem for high-speed target
engagement. Traditionally, mid-course guidance is
formulated mostly as an optimal control problem
to shape the flight trajectory and to maximize the
terminal speed or minimize the flight time. However,
solving LQR problems or training neural networks in
real time is often practically infeasible, especially in
the actual defense industry. Neural network guidance
might be unreliable in practice if neural networks are
not trained adequately.
The analysis of pure PNG law in 3-dimension
(3-D) was first studied in [10]. The performance
of pure PNG law is altered while the missile and
target motions deviate from the intercept course.
In [11]—[12] the demonstration of this pure PNG
was based on a missile with constant velocity. A
3-D PNG law according to the radial basis function
(RBF) neural network was proposed in [13], which
was applied to decrease miss distance (MD) between
aircraft and missile that travel in constant speed.
The issue of 3-D PNG law was discussed in [14] by
nonlinear differential equations and vector analysis.
The results of these references have characterized
the properties of the pure PNG law based on the
nonlinear dynamics of interception situations.
However, the issue of the interceptor traveling
with axial acceleration in 3-D space is much closer
to the real-world situations of interceptor-target
engagement.
Literature detailing the issues of medium or
terminal phase guidance law design subject to
high-speed targets is very rare. Here, a 3-D modified
proportional navigation guidance (MPNG) law is
derived, which accounts for the interceptor’s axial
acceleration and variation of the target acceleration.
It is, thus, especially applicable to interceptors
configured with a thrust-vector-control (TVC)
system for attitude control. In the medium guidance
phase, the interceptor trajectory is shaped by directly
controlling its flight path toward the incoming target
for energy expenditure savings. For the homing
phase the interceptor is guided by the MPNG law for
enhancement of agility and endgame performance.
The effect of the proposed design is verified via
numerical simulation to examine its engagement
performance. MD analysis is conducted for endgame
performance verification.
678 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 49, NO. 1 JANUARY 2013
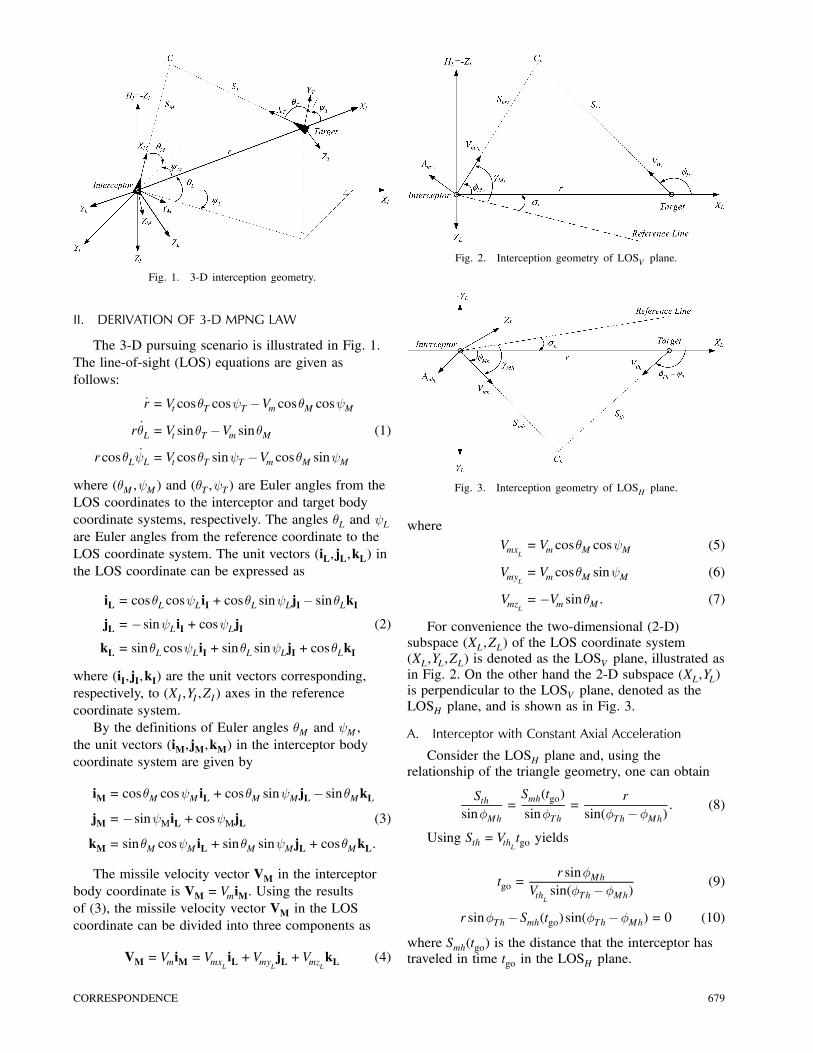
Fig. 1. 3-D interception geometry.
II. DERIVATION OF 3-D MPNG LAW
The 3-D pursuing scenario is illustrated in Fig. 1.
The line-of-sight (LOS) equations are given as
follows:
_r = Vt cosμT cosÃT¡Vm cosμM cosÃMr _μL = Vt sinμT¡Vm sinμM
rcosμL_ÃL = Vt cosμT sinÃT¡Vm cosμM sinÃM
(1)
where (μM ,ÃM) and (μT,ÃT) are Euler angles from the
LOS coordinates to the interceptor and target body
coordinate systems, respectively. The angles μL and ÃLare Euler angles from the reference coordinate to the
LOS coordinate system. The unit vectors (iL, jL,kL) in
the LOS coordinate can be expressed as
iL = cosμL cosÃLiI+cosμL sinÃLjI¡ sinμLkIjL =¡sinÃLiI+cosÃLjIkL = sinμL cosÃLiI+sinμL sinÃLjI+cosμLkI
(2)
where (iI,jI,kI) are the unit vectors corresponding,
respectively, to (XI ,YI ,ZI) axes in the reference
coordinate system.
By the definitions of Euler angles μM and ÃM ,
the unit vectors (iM,jM,kM) in the interceptor body
coordinate system are given by
iM = cosμM cosÃM iL+cosμM sinÃMjL¡ sinμMkLjM =¡sinÃMiL+cosÃMjL (3)
kM = sinμM cosÃM iL+sinμM sinÃMjL+cosμMkL:
The missile velocity vector VM in the interceptor
body coordinate is VM = VmiM. Using the results
of (3), the missile velocity vector VM in the LOS
coordinate can be divided into three components as
VM = VmiM = VmxLiL+Vmy
LjL+Vmz
LkL (4)
Fig. 2. Interception geometry of LOSV plane.
Fig. 3. Interception geometry of LOSH plane.
where
VmxL= Vm cosμM cosÃM (5)
VmyL= Vm cosμM sinÃM (6)
VmzL=¡Vm sinμM: (7)
For convenience the two-dimensional (2-D)
subspace (XL,ZL) of the LOS coordinate system
(XL,YL,ZL) is denoted as the LOSV plane, illustrated as
in Fig. 2. On the other hand the 2-D subspace (XL,YL)
is perpendicular to the LOSV plane, denoted as the
LOSH plane, and is shown as in Fig. 3.
A. Interceptor with Constant Axial Acceleration
Consider the LOSH plane and, using the
relationship of the triangle geometry, one can obtain
SthsinÁMh
=Smh(tgo)
sinÁTh=
r
sin(ÁTh¡ÁMh): (8)
Using Sth = VthLtgo yields
tgo =r sinÁMh
VthLsin(ÁTh¡ÁMh)
(9)
r sinÁTh¡ Smh(tgo)sin(ÁTh¡ÁMh) = 0 (10)
where Smh(tgo) is the distance that the interceptor has
traveled in time tgo in the LOSH plane.
CORRESPONDENCE 679

By using the LOS equations:
_r = VthLcosÁTh¡Vmh
LcosÁMh (11)
r _¾h = VthLsinÁTh¡Vmh
LsinÁMh (12)
and substituting (11) and (12) into (9), one can have
tgo =r sinÁMh
r _¾h cosÁMh¡ _r sinÁMh=
r
r _¾h cotÁMh¡ _r: (13)
From (9), (10), and (12), one gets
_¾h+1
r[Vmh
L¡ V̄mh
L] sinÁMh = 0 (14)
where the average speed V̄mhL= Smh(tgo)=tgo.
For a variable-speed interceptor heading to a
constant-speed target, Gutman’s result [15] was
_°Mh =N
·_¾h+
1
r(Vmh
L¡ V̄mh
L) sinÁMh
¸(15)
where N can be treated as the navigation guidance
gain. In particular the interceptor flies along the
interception course, with _°Mh = 0 in the LOSH plane
yielding
_¾h =¡1
r(Vmh
L¡ V̄mh
L)sinÁMh 6= 0: (16)
While _¾h = 0, by differentiating (12) and °Mh =
ÁMh+¾h, one obtains
_°Mh =¡_Vmh
L
VmhL
tanÁMh 6= 0: (17)
For practical purposes elaborating (15) in terms of
time-to-go gives
VmhL= Vmhf
L¡Amhx
Ltgo
Smh = VmhfLtgo¡
1
2Amhx
Lt2go
V̄mhL=Smh(tgo)
tgo= Vmhf
L¡ 12Amhx
Ltgo
(18)
where VmhfLis the final missile speed in the LOSH
plane and AmhxLis the missile longitudinal acceleration
in the LOS coordinates. Substituting (18) into (14)
givesr
tgo_¾h¡
1
2Amhx
LsinÁMh = 0: (19)
From the time-to-go equation (13), r=tgo =
r _¾h cotÁMh¡ _r, and substituting this into (19) gives(r _¾h cotÁMh¡ _r) _¾h¡ 1
2Amhx
LsinÁMh = 0: (20)
Recall (13) again
tgo =r
r _¾h cotÁMh¡ _r=
2r _¾hAmhx
LsinÁMh
: (21)
Using Vc =¡_r for the closing speed, the suggestedlateral command for collision in the LOSH plane is
AmhL=N 0 cosμM((Vc+ r _¾h cotÃM) _¾h¡ 1
2Amx cosμM sinÃM)
(22)where N 0 =NVm=Vc.The lateral acceleration command in the LOSH
plane can be translated in the interceptor body
coordinates by
AMHL=N 0 cosμM((Vc+ r
_̧z cotÃM)
_̧z ¡ 1
2Amx cosμM sinÃM )jM
(23)
where _̧ z is the LOS angular velocity vector in ZLcomponents in LOS coordinates. Using the same
procedures in LOSH before, the lateral acceleration
command in the LOSV plane is
AMVL=N 0[(Vc+ r
_̧y cotμM cosÃM)
_̧y ¡ 1
2Amx sinμM]
£ (sinμM sinÃM jM¡ cosÃMkM) (24)
where _̧ y is the LOS angular velocity vector in YLcomponents in LOS coordinate system.
The MPNG law generating the lateral
acceleration commands in the 3-D case can finally be
represented by
ACM =N0[(Vc+ r
_̧y cotμM cosÃM)
_̧y sinμM sinÃM
+(Vc+ r_̧z cotÃM)
_̧z cosμM ¡ 1
2Amx sinÃM]jM
¡N 0 cosÃM[(Vc+ r _̧ y cotμM cosÃM) _̧ y¡ 1
2Amx sinμM]kM: (25)
B. Interceptor with Changing Axial Acceleration
Assume that the target speed is constant and that
the interceptor has changing axial acceleration. First,
we focus on the LOSH plane. Let
AmhxL(tgo) = Amhxf
L¡ _Amhx
Ltgo (26)
where AmhxfLis the final acceleration at the predict
interception point (PIP), which is projected to the
LOSH plane, and assume that_Amhxf
Lis constant.
Then, the interceptor speed and traveling distance can
be expressed by integrating (26) and is obtained as
follows
¢VmhL= Amhxf
Ltgo¡ 1
2_Amhx
Lt2go
VmhL(tgo) = Vmhf
L¡Amhxf
Ltgo +
12_Amhx
Lt2go
Smh(tgo) = VmhfLtgo¡ 1
2Amhxf
Lt2go +
16_Amhx
Lt3go
V̄mhL= Vmhf
L¡ 1
2Amhxf
Ltgo +
16_Amhx
Lt2go:
(27)
Substituting (26) and (27) into (14) yields
r
tgo_¾h¡
1
2
μAmhxf
L¡ 23_Amhx
Ltgo
¶sinÁMh = 0: (28)
680 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 49, NO. 1 JANUARY 2013
The lateral acceleration command in the LOSHplane can be translated into the interceptor body
coordinates as
AMHL=
N 0 cosμM((Vc+ r_̧z cotÃM)
_̧z ¡ 1
2(Amx+
13_Amxtgo)
£ cosμM sinÃM)jM: (29)
Similarly, the lateral acceleration command in the
LOSV plane can be obtained as
AMVL=N 0[(Vc+ r
_̧y cotμM cosÃM)
_̧y
¡ 12(Amx+
13_Amxtgo)sinμM]
£ (sinμM sinÃMjM¡ cosÃMkM): (30)
Thus, the MPNG law in the 3-D case can finally
be summarized as follows
ACM =N0[(Vc+ r
_̧y cotμM cosÃM)
_̧y sinμM sinÃM
+(Vc+ r_̧z cotÃM)
_̧z cosμM
¡ 12(Amx+
13_Amxtgo)sinÃM]jM
¡N 0 cosÃM"(Vc+ r
_̧y cotμM cosÃM)
_̧y
¡ 12(Amx+
13_Amxtgo)sinμM
#kM:
(31)
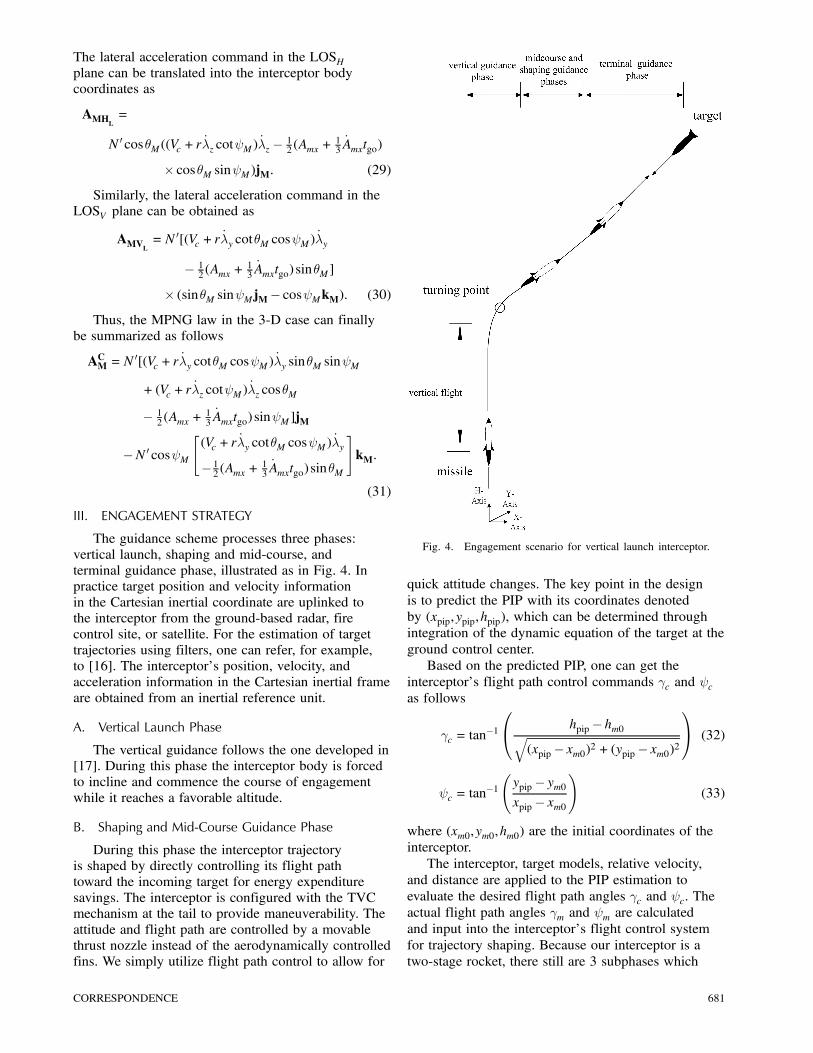
III. ENGAGEMENT STRATEGY
The guidance scheme processes three phases:
vertical launch, shaping and mid-course, and
terminal guidance phase, illustrated as in Fig. 4. In
practice target position and velocity information
in the Cartesian inertial coordinate are uplinked to
the interceptor from the ground-based radar, fire
control site, or satellite. For the estimation of target
trajectories using filters, one can refer, for example,
to [16]. The interceptor’s position, velocity, and
acceleration information in the Cartesian inertial frame
are obtained from an inertial reference unit.
A. Vertical Launch Phase
The vertical guidance follows the one developed in
[17]. During this phase the interceptor body is forced
to incline and commence the course of engagement
while it reaches a favorable altitude.
B. Shaping and Mid-Course Guidance Phase
During this phase the interceptor trajectory
is shaped by directly controlling its flight path
toward the incoming target for energy expenditure
savings. The interceptor is configured with the TVC
mechanism at the tail to provide maneuverability. The
attitude and flight path are controlled by a movable
thrust nozzle instead of the aerodynamically controlled
fins. We simply utilize flight path control to allow for
Fig. 4. Engagement scenario for vertical launch interceptor.
quick attitude changes. The key point in the design
is to predict the PIP with its coordinates denoted
by (xpip,ypip,hpip), which can be determined through
integration of the dynamic equation of the target at the
ground control center.
Based on the predicted PIP, one can get the
interceptor’s flight path control commands °c and Ãcas follows
°c = tan¡1
0@ hpip¡ hm0q(xpip¡ xm0)2 + (ypip¡ xm0)2
1A (32)
Ãc = tan¡1Ãypip¡ ym0xpip¡ xm0
!(33)
where (xm0,ym0,hm0) are the initial coordinates of the
interceptor.
The interceptor, target models, relative velocity,
and distance are applied to the PIP estimation to
evaluate the desired flight path angles °c and Ãc. The
actual flight path angles °m and Ãm are calculated
and input into the interceptor’s flight control system
for trajectory shaping. Because our interceptor is a
two-stage rocket, there still are 3 subphases which
CORRESPONDENCE 681

should be taken into consideration, i.e., the 1st stage
mid-course, coast, and 2nd stage mid-course. In our
engagement strategy the 1st stage mid-course phase
uses the flight path control. When the interceptor is in
coast, there is no guidance applied, and the interceptor
conducts free flight toward the PIP. After coast the 1st
stage is separated after the 2nd stage glint. The 2nd
stage mid-course phase is designed to adopt the same
MPNG guidance law as that of the terminal phase to
avoid causing an unsmoothed transient while changing
guidance phases.
C. Terminal Guidance Phase
For the terminal phase, the interceptor is guided
by the MPNG law for enhancement of interception
accuracy which was given by (31).
IV. SIMULATION RESULTS
By simulation we verify the guidance performance
of the MPNG law. The simulation is divided into two
scenarios, interceptor with constant and varying axial
acceleration, which is shown below, respectively. All
the simulation results of MPNG are compared with
traditional PNG.
Consider the 3-D translational equations of motion
of the interceptor’s motion:
_vm = (Tcos®¡D)=m¡ g sin°m, vm(0) = 0
(34)
_°m = (L+T sin®)cosÁm=(mvm)¡ g cos°m=Vm,°m(0) = °m0 (35)
_Ãm = (L+T sin®)sinÁm=(mvm cos°m),
Ãm(0) = Ãm0 (36)
_xm = Vm cos°m cosÃm, xm(0) = xm0 (37)
_ym = Vm cos°m sinÃm, ym(0) = ym0 (38)
_hm = Vm sin°m, hm(0) = hm0 (39)
where m is the missile mass, T is the thrust, ® is the
angle-of-attack, °m is the flight path angle, Ãm is
the azimuth angle, the lift force L= (½v2msmCmL)=2,
and the drag force D = (½v2msmCmD)=2, with
CmL = CmL®(®¡®0) and CmD = CmD
0+¹C2mL. The
aerodynamic derivatives CmL®, CmD
0, and ¹ are given
as functions of the Mach number, that is, the function
of the velocity vm and the altitude hm. sm is the
reference area of the missile, and ½ is the air density
which is measured in kg/m3 and shown to be an
accurately exponential approximation as
½=
(1:22557e¡h=9144, h < 9,144 m
1:7523e¡h=6705:6, h¸ 9,144 m:
Fig. 5. Definitions of interceptor’s flight path angle °m and Ãm.
Fig. 6. Geometry of reentry target and ground-based radar.
Referring to Fig. 5 the flight path angles °m and
Ãm can be treated as the control variables on the
vertical and horizontal plane guidance laws during the
1st stage mid-course guidance phase, respectively.
In modeling the ballistic target motion for
simulation study, we consider the target vehicle in the
reentry phase to be located over a flat, nonrotating
Earth with gravity. The geometry illustration of the
reentry target and radar system is shown in Fig. 6.
The ballistic target model in the radar coordinates
centered at the radar site can be described as
_Vtx =¡½V2t2¯
g cos°t cosÃt+Atx, Vtx(0) = Vtx0
(40)
_Vty =½V2t2¯
g cos°t sinÃt+Aty, Vty(0) = Vty0 (41)
_Vth =¡½V2t2¯
g sin°t¡g+Ath, Vth(0) = Vth0 (42)
where Vtx, Vty, and Vth are velocity components of Vtin the (XI ,YI ,HI) axes, respectively; Atx(t), Aty(t), and
Ath(t) are uncertain accelerations due to target model
uncertainties and maneuverability.
682 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 49, NO. 1 JANUARY 2013
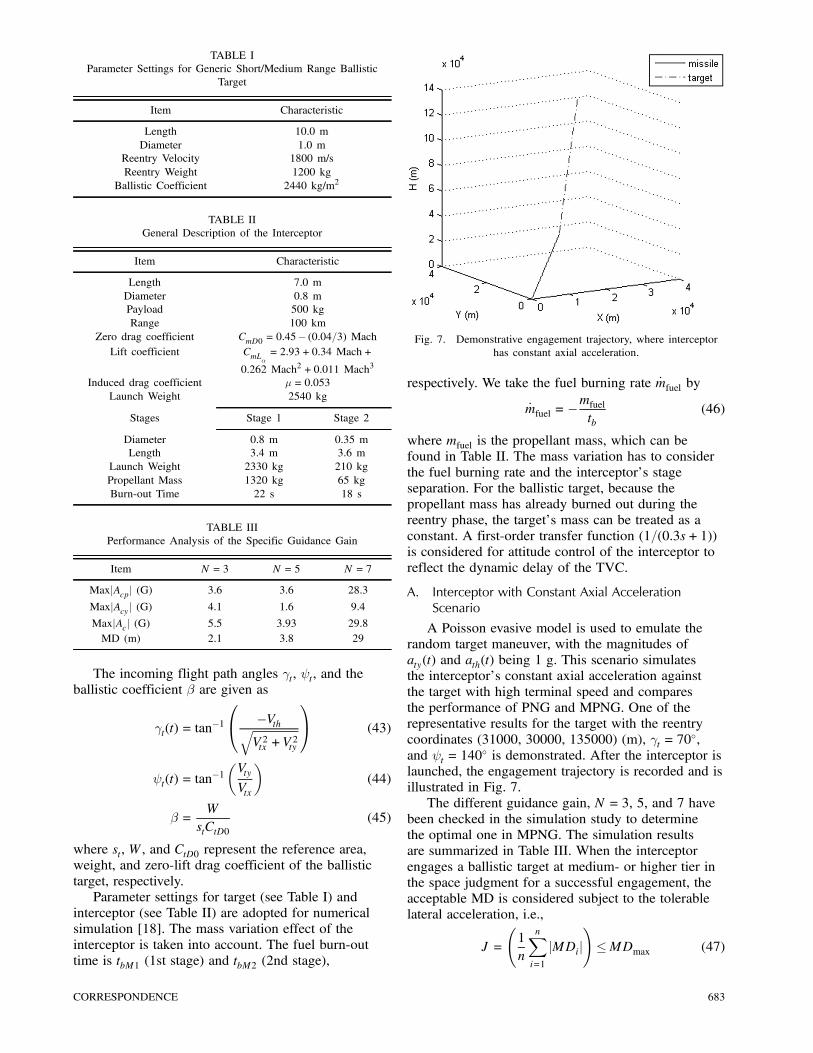
TABLE I
Parameter Settings for Generic Short/Medium Range Ballistic
Target
Item Characteristic
Length 10.0 m
Diameter 1.0 m
Reentry Velocity 1800 m/s
Reentry Weight 1200 kg
Ballistic Coefficient 2440 kg/m2
TABLE II
General Description of the Interceptor
Item Characteristic
Length 7.0 m
Diameter 0.8 m
Payload 500 kg
Range 100 km
Zero drag coefficient CmD0 = 0:45¡ (0:04=3) MachLift coefficient CmL
®= 2:93+0:34 Mach+
0:262 Mach2 +0:011 Mach3
Induced drag coefficient ¹= 0:053
Launch Weight 2540 kg
Stages Stage 1 Stage 2
Diameter 0.8 m 0.35 m
Length 3.4 m 3.6 m
Launch Weight 2330 kg 210 kg
Propellant Mass 1320 kg 65 kg
Burn-out Time 22 s 18 s
TABLE III
Performance Analysis of the Specific Guidance Gain
Item N = 3 N = 5 N = 7
MaxjAcpj (G) 3.6 3.6 28.3
MaxjAcy j (G) 4.1 1.6 9.4
MaxjAcj (G) 5.5 3.93 29.8
MD (m) 2.1 3.8 29
The incoming flight path angles °t, Ãt, and the
ballistic coefficient ¯ are given as
°t(t) = tan¡1
0@ ¡VthqV2tx +V
2ty
1A (43)
Ãt(t) = tan¡1μVty
Vtx
¶(44)
¯ =W
stCtD0(45)
where st, W, and CtD0 represent the reference area,
weight, and zero-lift drag coefficient of the ballistic
target, respectively.
Parameter settings for target (see Table I) and
interceptor (see Table II) are adopted for numerical
simulation [18]. The mass variation effect of the
interceptor is taken into account. The fuel burn-out
time is tbM1 (1st stage) and tbM2 (2nd stage),
Fig. 7. Demonstrative engagement trajectory, where interceptor
has constant axial acceleration.
respectively. We take the fuel burning rate _mfuel by
_mfuel =¡mfueltb
(46)
where mfuel is the propellant mass, which can be
found in Table II. The mass variation has to consider
the fuel burning rate and the interceptor’s stage
separation. For the ballistic target, because the
propellant mass has already burned out during the
reentry phase, the target’s mass can be treated as a
constant. A first-order transfer function (1=(0:3s+1))
is considered for attitude control of the interceptor to
reflect the dynamic delay of the TVC.
A. Interceptor with Constant Axial AccelerationScenario
A Poisson evasive model is used to emulate the
random target maneuver, with the magnitudes of
aty(t) and ath(t) being 1 g. This scenario simulates
the interceptor’s constant axial acceleration against
the target with high terminal speed and compares
the performance of PNG and MPNG. One of the
representative results for the target with the reentry
coordinates (31000, 30000, 135000) (m), °t = 70±,
and Ãt = 140± is demonstrated. After the interceptor is
launched, the engagement trajectory is recorded and is
illustrated in Fig. 7.
The different guidance gain, N = 3, 5, and 7 have
been checked in the simulation study to determine
the optimal one in MPNG. The simulation results
are summarized in Table III. When the interceptor
engages a ballistic target at medium- or higher tier in
the space judgment for a successful engagement, the
acceptable MD is considered subject to the tolerable
lateral acceleration, i.e.,
J =
Ã1
n
nXi=1
jMDij!·MDmax (47)
CORRESPONDENCE 683

Fig. 8. Time history of lateral acceleration command Acy in missile with constant axial acceleration by using: (a) PNG and (b) MPNG.
TABLE IV
Comparison of PNG and MPNG for a Constant Axial
Acceleration Interceptor
Item PNG MPNG
MaxjAcpj (G) 0.5 0.64
MaxjAcy j (G) 8.8 3.9
MaxjAcj (G) 8.81 3.95
MD (m) 1.3 0.7
TABLE V
Comparison of PNG and MPNG for a Varying Axial Acceleration
Interceptor
Item PNG MPNG
MaxjAcpj (G) 1.24 1.5
MaxjAcy j (G) 13.8 4
MaxjAcj (G) 13.9 4.3
MD (m) 8.9 1.3
Fig. 10. Time history of lateral acceleration command Acy in missile with varying axial acceleration by using: (a) PNG and (b) MPNG.
Fig. 9. Demonstrative engagement trajectory, where interceptor
has varying axial acceleration.
684 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 49, NO. 1 JANUARY 2013

Fig. 11. Comparison of defensible volumes between PNG (dash line) and MPNG (solid line) based designs for interceptor with
constant axial acceleration variety against target reentry angle of (a) 45±, (b) 60±, and (c) 75±.
s.t. qA2cp(t)+A
2cy(t)· Acmax, 0· t· tf (48)
where n is the number of total Monte Carlo runs (in
this research n= 10), MDmax(= 4 m) is the allowable
MD, tf is the total fight time, and Acmax(= 4:5 g) is
the allowable lateral acceleration.
For N = 3 the MD observed is under the
requirement, but the lateral acceleration has already
exceeded the lateral acceleration limit. When N = 7
both the MD and lateral acceleration exceed the
requirements. When N = 5 the simulation result
gets less lateral acceleration with an acceptable MD.
Therefore, N is assigned as 5 in the subsequent
simulation in the study. To compare the interception
performance in PNG and MPNG (both with N = 5),
the results of the lateral acceleration commands in
the vertical (Acp) and horizontal (Acy) planes and MD
CORRESPONDENCE 685

are listed in Table IV. The lateral accelerationcommand Acy for the interceptor guided by PNG andMPNG is displayed in Fig. 8. The simulation resultsshow that the interceptor with MPNG demonstratesmore superior performance than the others with PNGin less lateral acceleration command and smaller MD.
B. Interceptor with Varying Axial Acceleration Scenario
Consider the scenario in which the interceptortravels with varying axial acceleration. The target’sinitial location is also at (31000,30000,135000) (m),and °t = 70
± and Ãt = 140± are considered. The
engagement trajectory is recorded and illustratedin Fig. 9. The results of the lateral accelerationcommands in the vertical (Acp) and horizontal (Acy)planes and MD are listed in Table V. The lateralacceleration command Acy for the interceptor guidedby PNG and MPNG is displayed in Fig. 10. Thesimulation results also show that the interceptor withMPNG demonstrates a more superior performancethan the other with PNG in less lateral accelerationcommand and smaller MD.
C. Defensible Volume
The allowable upper limit of the final MD issupposed to be 4 m so as to meet the missionrequirement. The resulting defensible volume witha comparison between PNG and MPNG laws isillustrated in Fig. 11, which shrinks with the differentreentry angles in 45, 60, and 75 deg of the target.It reveals that sensitivity of the defensible volumewill be increased with the increasing reentry angles.This is quite reasonable because the interceptor’sinitial heading error will increase as the reentry angleincreases. This leads to the fact that the PNG lawcannot adequately intercept because of the extremelylarge lateral acceleration required at the terminalinterception.For the MPNG law the defensible volume under
the target reentry angle of 75 deg is larger than thatof 45 deg. The statistics of our simulation revealsthat the defensible volume is the largest when thereentry angle is 75 deg; if the reentry angle is largerthan 75 deg, the horizontal displacement of the targetwill be small, which increases the difficulty of theinterception and leads to a smaller defensible volume.
V. CONCLUSION
A 3-D MPNG law has been developed to guidethe interceptor against high-speed targets. The MPNGlaw is sophistically designed to account for theinterceptor’s axial acceleration and the variations oftarget acceleration. The effect of the proposed designhas been verified via numerical simulation to examinethe interception performance. 3-D defensible volumeshave also been characterized to evaluate the defenseperformance of our proposed design. Comparison ofthe MPNG and PNG has been conducted to show thesuperiority of the proposed design.
YU-PING LIN
CHUN-LIANG LIN
YUN-HAO LI
Department of Electrical Engineering
National Chung Hsing University
250 Kuo-Kuang Rd.
Taichung, 402
Taiwan
E-mail:
REFERENCES
[1] Guelman, M.
A qualitative study of proportional navigation.IEEE Transactions on Aerospace and Electronic Systems,
AES-7, 4 (1971), 637—643.[2] Fossier, M. W.
The development of radar homing missiles.
Journal of Guidance, Control, and Dynamics, 7, 6 (1984),641—651.
[3] Ghawghawe, S. N. and Ghose, D.Pure proportional navigation against time-varying target
maneuvers.
IEEE Transactions on Aerospace and Electronic Systems,
32, 4 (1996), 1336—1346.[4] Bryson, Jr., A. E. and Ho, Y. C.
Applied Optimal Control.
Washington, D.C.: Hemisphere, 1975.
[5] Newman, B.Strategic intercept midcourse guidance using modified
zero effort miss steering.
Journal of Guidance, Control, and Dynamics, 19, l (1996),107—112.
[6] Yuan, P. J. and Chem, J. S.
Extended proportional navigation.Proceedings of the AIAA Guidance, Navigation and
Control Conference and Exhibit, Denver, CO, Aug., 2000,
AIAA-2000-4161.
[7] Lin, C. L. and Su, H. W.
Adaptive fuzzy gain scheduling in guidance system
design.Journal of Guidance, Control, and Dynamics, 24, 4 (2001),683—692.
[8] Song, E. J. and Tahk, M. J.
Three-dimensional midcourse guidance using neural
networks for interception of ballistic targets.
IEEE Transactions on Aerospace and Electronic Systems,38, 3 (2002), 19—24.
[9] Bezick, S. and Gray, W. S.Guidance of a homing missile via nonlinear geometric
control methods.
Journal of Guidance, Control, and Dynamics, 18, 3 (1995),441—148.
[10] Adler, F. P.
Missile guidance by three-dimensional proportionalnavigation.
Journal of Applied Physics, 27 (1956), 500—507.[11] Song, S. H. and Ha, I. J.
A Lyapunov-like approach to performance analysis of
3-dimensional pure PNG laws.IEEE Transactions on Aerospace and Electronic Systems,
30, 1 (1994), 238—248.[12] Oh, J. H. and Ha, I. J.
Capturability of the 3-dimensional pure PNG law.
IEEE Transactions on Aerospace and Electronic Systems,
35, 2 (1999), 491—503.[13] Gu, W., Zhao, H., and Zhang, R.
A three-dimensional proportional guidance law based onRBF neural network.
Proceedings of the 7th World Congress on Intelligent
Control and Automation, (WCICA 2008), Chongqing,
China, June 25—27, 2008, pp. 6978—6982.
686 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 49, NO. 1 JANUARY 2013

[14] Yang, C. D. and Yang, C. C.
Analytical solution of generalized three-dimensional
proportional navigation.
Journal of Guidance, Control, and Dynamics, 19, 3 (1996),
721—724.
[15] Gutman, S.
Applied Min-Max Approach to Missile Guidance and
Control (Progress in Astronautics and Aeronautics).
Reston, VA: AIAA, 2005.
[16] Farina, A., Ristic, B., and Benvenuti, D.
Tracking a ballistic target: Comparison of several
nonlinear filters.
IEEE Transactions on Aerospace and Electronic Systems,
38, 3 (2002), 854—867.
[17] Lin, C. L., Lin, Y. P., and Wang, T. L.
A fuzzy guidance law for vertical launch interceptors.
Control Engineering Practice, 17, 8 (2009), 914—923.
[18] Lin, C. L., et al.
Development of an integrated fuzzy-logic-based missile
guidance law against high-speed target.
IEEE Transactions on Fuzzy Systems, 12, 2 (2004),
157—169.
Errata: Digital GNSS PLL Design Conditioned onThermal and Oscillator Phase Noise
The above paper1 was published with an incorrect
figure. The correct Figure 6 appears below.
Fig. 6. Wiener filter block diagram. Signal estimate μ̂(n) is made
by passing the signal-plus-noise μ(n)+nμ(n) through filter G(z).
JAMES T. CURRAN
GÉRARD LACHAPELLE
University of Calgary
500 University Drive NW
Calgary, AB T2N 1N4, Canada,
E-mail: ([email protected])
COLIN C. MURPHY
University College Cork
College Rd.
Cork, Munster, Ireland.
1Curran, J. T., Lachapelle, G., and Murphy, C. C., Digital GNSS
PLL Design Conditioned on Thermal and Oscillator Phase Noise,
IEEE Transactions on Aerospace and Electronic Systems, 48, 1 (Jan.
2012), 180—196.
Manuscript received October 27, 2012.
IEEE Log No. T-AES/49/1/944384.
0018-9251/13/$10.00 c° 2013 IEEE
CORRESPONDENCE 687





























