Embed Size (px)
Citation preview

地下电缆防破坏监测系统开发(一阶段)
结题报告
2015.08.21

汇报提要

系统包含:
系统架构方案设计
声源识别
方位角估计
视频触发
振动模块

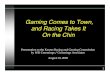
系统架构图

TP-LINK
220/110VInput
12VOutput
12VOutput
TP-LINK
220/110VI nput
12VOutput
12VOutput
TP-LINK
电箱 100m
100m
80m
80m
60m
60m
地网总
线模块
电力载
波模块
振动检
测模块
电力载
波模块
振动检
测模块
电力载
波模块
振动检
测模块
声音定位
阵列
摄像机
变压器
声音定位
阵列
摄像机
变压器
声音识别
阵列
交换机 交换机
交换机
插线板
插线板
插线板插线板
现场施工图
系统架构方案设计

合同执行情况
总结及下一步工作目标——总结
对应的完成情况说明如下:
研制了两种十字声阵列,一种专门用于数据采集,初步建立了在不同环
境下声指纹特征库;另一种阵列实现了定位算法的嵌入式化,实时给出
测向定位结果。研制了: 1)基于LPCC与SVM的声识别算法;2)基于统
计分析的工程器械声识别算法。
在DSP处理器上实现基于AML测向算法,通过网口实时输出方位角估计结
果。
提供了3套传声器阵列,1套用于数据采集,2套用于实时测向。

合同执行情况
总结及下一步工作目标——总结
对应的完成情况说明如下:
振动识别距离:液压(水泥43米),手镐(水泥25米,泥土15米)。
方位角估计:手镐、切割机、挖掘机(理想情况100米,复杂工况40米)100
米方位角估计方差为2度左右。
声源识别精度:
出于成本考虑,目前声阵列还做不到防雨防尘。
设备类型识别距离
理想环境 工地环境
手镐 60m 45m
切割机 70m 50m
冲击锤 230m 180m
挖掘机 50m 50m

科研成果‐硬件成果
总结及下一步工作目标——总结
完成声传感器阵列(以下简称声阵列)定位系统的研制。
声阵列采用十字四元阵的阵型结构,在实际设计中,为了增加冗余,阵型按照八元
阵设计,阵列尺寸如图所示,阵列实物图如图所示。

科研成果‐硬件成果
总结及下一步工作目标——总结
摄像头选用海康威视的DS‐2ZCN2006,声阵列、摄像头实物展示。

科研成果‐硬件成果
总结及下一步工作目标——总结
当声音识别到目标信号后,触发相应摄像头弹出报警窗口,实现视频联动。图为客户
端界面以及声音识别结果触发摄像头弹出报警信息画面。

科研成果‐硬件成果
总结及下一步工作目标——总结
完成振动传感器的选型。该传感器为电阻型传感器,需要使用外部恒流源驱动,所
以在电路上比较复杂,但由于该传感器的输出的特性,并没有受此传感器生产方的
电路影响,所以其传输特性较好,并且能够测试微小的振动。

科研成果‐硬件成果
总结及下一步工作目标——总结
电路板的开发研制。硬件设计以STM32F103RBT6(MCU)为核心,辅以电源模块、
数据存储、人机交互部分以及信号调理部分组成。行成一套完整的从数据的输入—
—放大——模数转换——数据显示——模式设置——数据处理——数据上传的系统。

科研成果‐软件成果
总结及下一步工作目标——总结
地下电缆防外力破坏实时监控系统软件一套,界面如下图所示。

科研成果‐专利
总结及下一步工作目标——总结
完成发明专利3项:
一种基于MFCC改进算法的声音特征提取及工程机械识别方法
基于声音线性预测倒谱系数的工程机械识别方法
一种基于声信号统计特征的挖掘器械识别方法
















![[0820 석재호]headfirst디자인패턴](https://img.pdfslide.net/doc/110x75/5588f93ad8b42a10688b464a/0820-headfirst.jpg)