Embed Size (px)
Citation preview

'Development and Manufacturing ofDirect Antenna Integrated RF
Front-End for Ice Sounding Radar'
Master thesis
by
Thomas Sørensen Yassin, s991685
project councilor
Viktor Krozer
instituteØrsted DTU

ContentsContents iii
List of Figures vii
List of Tables viii
1 Acknowledgement ix
2 Introduction 12.1 Operating description . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
3 System Architectures 43.1 Transmit/Receiver modules . . . . . . . . . . . . . . . . . . . . . . . . 43.2 Small T/R modules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53.3 One vs. several T/R modules . . . . . . . . . . . . . . . . . . . . . . . 8
4 System components 94.1 Switch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94.2 High Power Amplier . . . . . . . . . . . . . . . . . . . . . . . . . . . 94.3 Low Noise Amplier . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4.3.1 Noise Figure . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104.4 Digital Signal Generator (DSG) . . . . . . . . . . . . . . . . . . . . . . 124.5 Digital Front End (DFE) . . . . . . . . . . . . . . . . . . . . . . . . . . 124.6 Antenna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124.7 P-sounder architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.7.1 P-sounder Calibration procedure . . . . . . . . . . . . . . . . . 14
5 P-sounder component specications 175.1 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
6 P-sounder operation 196.1 Aircraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196.2 Clutter suppression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196.3 Field operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
7 Power amplier 237.1 Power Amplier basics . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
8 Components 278.1 Power modules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 278.2 Low noise amplier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 288.3 circulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
9 Power divider design 309.1 Semi-lumped Wilkinson power divider . . . . . . . . . . . . . . . . . . 319.2 Lumped Wilkinson Power Divider . . . . . . . . . . . . . . . . . . . . . 339.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
i

10 Rat-race hybrid/coupler 4110.1 Lumped element Rat-race hybrid . . . . . . . . . . . . . . . . . . . . . 42
10.1.1 Improving amplitude and phase bandwidth . . . . . . . . . . . 4510.2 Practical implementation . . . . . . . . . . . . . . . . . . . . . . . . . 47
10.2.1 Alternative design using Wilkinson divider . . . . . . . . . . . . 5010.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
11 Switch 5411.1 Switch devices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5511.2 PIN diode basics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5611.3 Switch topologies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
11.3.1 Multi-throw switches . . . . . . . . . . . . . . . . . . . . . . . . 5911.4 The UP1001 PIN diode . . . . . . . . . . . . . . . . . . . . . . . . . . 60
11.4.1 PIN circuit model . . . . . . . . . . . . . . . . . . . . . . . . . 6211.5 Switch design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6511.6 Transient measurement . . . . . . . . . . . . . . . . . . . . . . . . . . . 6911.7 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
12 Antenna 7212.1 Antenna selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7212.2 Bandwidth improvement . . . . . . . . . . . . . . . . . . . . . . . . . . 7312.3 Feed mechanism design . . . . . . . . . . . . . . . . . . . . . . . . . . . 7312.4 The P-sounder antenna . . . . . . . . . . . . . . . . . . . . . . . . . . 75
12.4.1 Foam antenna . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7612.4.2 Cavity antenna . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
12.5 P-sounder array . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8312.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
13 Measurements 8613.1 Power module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8613.2 Low Noise Amplier . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9213.3 Complete system test . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
13.3.1 Complete test results . . . . . . . . . . . . . . . . . . . . . . . . 9313.4 summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
14 Conclusion 95
A Summery of T/R modules 101
B Power device 101
C Mechanical drawings 102
D Distributed Rat-race coupler 104
E Layout Wilkinson divider 107
F Layout lumped Rat-race and 180 wilkinson coupler 108
G Layout Switch 110
ii

H Antenna test xture 111
I Transistor box 113
iii

List of Figures1 A mapping of the ice depth and mean temperature in Antarctica[1]. . 12 Simple block diagram of a front-end module. . . . . . . . . . . . . . . . 43 Example of architecture using several T/R modules[2]. . . . . . . . . . 54 Example of architecture in small T/R module[2]. . . . . . . . . . . . . 65 Amplitude and phase as a function of frequency for 14 T/R modules [2]. 76 Example of front-end using one high power amplier. . . . . . . . . . . 87 Cascaded network. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108 Illustrating the P-sounder architecture. This is showing only one patch. 139 Receive conguration for the P-sounder . . . . . . . . . . . . . . . . . 1410 The calibration loops of the EMI SAR [3] . . . . . . . . . . . . . . . . 1511 Superposition of all the T/R modules, where each module is scrambled
by its own code sequence.[4] . . . . . . . . . . . . . . . . . . . . . . . . 1612 The Twin Otter airplane seen from above with possible antenna place-
ments. The structures are up to scale. . . . . . . . . . . . . . . . . . . 1913 Illustrates the ight direction and the dierent across and along track. 2014 Showing the P-sounder antenna array divided into two apertures, A
and B. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2015 The last reected signal from a transmitted pulse for dierent ice thick-
nesses. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2216 Illustration of prototype amplier and current waveform.[5] . . . . . . 2317 Pulse waveform due to class B operation[6]. . . . . . . . . . . . . . . . 2418 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2519 Wilkinson Power Divider . . . . . . . . . . . . . . . . . . . . . . . . . . 3120 Equivalent section of λ/4-segment. . . . . . . . . . . . . . . . . . . . . 3121 Geysel 3-dB power divider. All lines are λ/4. . . . . . . . . . . . . . . 3322 Low-pass networks. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3323 Ideal lumped Wilkinson divider. . . . . . . . . . . . . . . . . . . . . . . 3524 Simulation of Wilkinson divider with inductor models. . . . . . . . . . 3525 Measured response of Wilkinson divider with variable capacitors. . . . 3626 Schematic of Wilkinson divider with SMD components corresponding
to the values in Table.7. . . . . . . . . . . . . . . . . . . . . . . . . . . 3727 Simulation result of circuit in Fig.26. . . . . . . . . . . . . . . . . . . . 3728 Measured frequency response of Wilkinson power divider with SMD
components. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3829 Layout of distributed ring hybrid[7]. . . . . . . . . . . . . . . . . . . . 4130 High-pass tee network . . . . . . . . . . . . . . . . . . . . . . . . . . . 4231 Schematic of Rat-race coupler with ideal components. Port 1 is the
input port and port 4 is the isolated port. . . . . . . . . . . . . . . . . 4332 Simulation of Rat-race coupler with ideal components. . . . . . . . . . 4433 Phase dierence between port 2 and port 3 in Fig.32 . . . . . . . . . . 4434 Rat-race coupler with each arm made from two sections. . . . . . . . . 4535 Simulation of Rat-race coupler with ideal components and two sections. 4636 Phase dierence between port 2 and port 3 in Fig.34 . . . . . . . . . . 4637 Simulated response for the rat race coupler with non-ideal components. 4738 Showing the inductance and quality factor of the Mini SpringTM Coil-
craft inductors. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4839 Measured response for the rat race coupler with non-ideal components. 49
iv

40 Schematic showing the components of the 180 divider. . . . . . . . . . 5141 Simulated frequency response of 180 Wilkinson power divider. . . . . 5242 Measured frequency response of 180 Wilkinson power divider. . . . . 5343 Dierent switch topologies . . . . . . . . . . . . . . . . . . . . . . . . . 5444 Electrical symbol and chip outline . . . . . . . . . . . . . . . . . . . . 5645 (Left)Simplied PIN diode model under reverse bias. (Right)Simplied
PIN diode model under forward bias. . . . . . . . . . . . . . . . . . . . 5846 SPST switch with diode in series conguration. Also shown is the
equivalent circuit.[8] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5847 SPST switch with diode in shunt conguration. Also shown is the
equivalent circuit.[8] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5948 SPST switch with diodes in series and shunt conguration.[9] . . . . . 5949 SPST switch with diodes in tuned conguration.[9] . . . . . . . . . . . 6050 Examples of SPDT switches using series and shunt diodes[9]. . . . . . 6051 Nonlinear model of PIN diode. . . . . . . . . . . . . . . . . . . . . . . 6252 Measured data from the UPP1001 PIN diode datasheet. . . . . . . . . 6253 The I-V characteristic of the UPP1001 PIN diode. . . . . . . . . . . . 6354 The I-V characteristic with the current in logarithmic scale. . . . . . . 6455 Measured resistance of the UPP1001 diode as a function of forward
current. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6456 Comparison between PIN diode model and measurement. . . . . . . . 6557 Ideal schematic of SPDT switch. . . . . . . . . . . . . . . . . . . . . . 6658 Schematic of SPDT switch with layout incorporated. . . . . . . . . . . 6759 Simulation results of the SPDT switch. . . . . . . . . . . . . . . . . . . 6760 Measurement transmission of the SPDT switch from port 1 to port 2. 6861 Measurement results of the SPDT switch from port 1 to port 3. . . . . 6862 Measurement isolation of the SPDT switch. . . . . . . . . . . . . . . . 6963 Transient response of the output signal with bias turned On and OFF.
The scale is 40µs/div and 1.0V/div. . . . . . . . . . . . . . . . . . . . 7064 A zoom in on the transition from "ON" to "OFF" for the switch. . . . 7065 Bias circuitry for the control of PIN switch . . . . . . . . . . . . . . . 7166 Showing the bandwidth and eciency variations vs. substrate thickness
and dielectric constant[10]. . . . . . . . . . . . . . . . . . . . . . . . . . 7367 Dierent excitation structures with matching elements. . . . . . . . . . 7468 Example of edge coupled patch antenna.[10] . . . . . . . . . . . . . . . 7469 Patch antenna with capacitive probe feeds.[10] . . . . . . . . . . . . . . 7570 Input impedance of patch antenna with a length of 52 x 52 mm at
1.8GHz as a function of probe dimensions. (a) Gap width between rect-angular resonant patch and capacitor patch(keep l=5mm and w=10mm).(b) Length of the capacitor patch (keep d=8mm and l=5mm). (c)Width of the capacitor patch (keep d=8mm and w=10mm).[10] . . . 76
71 P-sounder Foam antenna. . . . . . . . . . . . . . . . . . . . . . . . . . 7772 Radiation pattern of Foam antenna. . . . . . . . . . . . . . . . . . . . 7773 S-parameters of Foam antenna. Notice that S11 = S22 and S21 = S12. . 7874 Showing the simulated directivity components with two cuts of the
Foam antenna. Each plot contains the co- and crosspolarization. . . . 7875 Foam antenna and its measurements xture at IMST. . . . . . . . . . 7976 Measured directivity for the Foam antenna with φ = 0(E-plane). . . . 79
v

77 Measured directivity for the Foam antenna with φ = 90(H-plane). . . 7978 P-sounder Cavity antenna. The whole antenna is enclosed in a metal
box. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8079 Simulated radiation pattern of Cavity antenna. . . . . . . . . . . . . . 8180 Comparison between simulated and measured data for the Cavity an-
tenna, when a signal is exciting the horizontal port. . . . . . . . . . . . 8181 Comparison between simulated and measured data for the Cavity an-
tenna, when a signal is exciting the vertical port. . . . . . . . . . . . . 8282 Showing the simulated directivity components with two cuts of the
Cavity antenna. Each plot contains the co- and crosspolarization. . . . 8283 Cavity antenna and its measurements xture at IMST. . . . . . . . . . 8284 Measured directivity for the Cavity antenna (left) E-plane and (right)
H-plane. Both copolarization. . . . . . . . . . . . . . . . . . . . . . . . 8385 Measured directivity for the Cavity antenna (left) E-plane and (right)
H-plane. Both cross-polarization. . . . . . . . . . . . . . . . . . . . . . 8386 The P-sounder antenna with outer dimensions. . . . . . . . . . . . . . 8487 The internal structure of one antenna with dimensions. . . . . . . . . . 8488 Excitation scheme for the array. . . . . . . . . . . . . . . . . . . . . . . 8489 Antenna pattern of the conguration in Fig.88.(Left) is the horizontal
array. (Right is the vertical array.) . . . . . . . . . . . . . . . . . . . . 8590 Showing the power module in its case. . . . . . . . . . . . . . . . . . . 8691 Test setup for measurement of output power. . . . . . . . . . . . . . . 8792 Output power measured at dierent input power levels. They are both
biased with VDD=12.5V and VGG=5V. . . . . . . . . . . . . . . . . . 8793 Measured coupling factor in dB of the coupler in Fig.91. . . . . . . . . 8894 Output power measured as a function of input power. This is mea-
sured at the center frequency of 435MHz. They are both biased withVDD=12.5V and VGG=5V. . . . . . . . . . . . . . . . . . . . . . . . . 88
95 Drain current measured at dierent input power levels. They are bothbiased with VDD=12.5V and VGG=5V. . . . . . . . . . . . . . . . . . 89
96 Drain eciency measured at dierent input power levels. They areboth biased with VDD=12.5V and VGG=5V. . . . . . . . . . . . . . . 89
97 Test setup to measure the input return loss. . . . . . . . . . . . . . . . 9098 Return of the two power modules at dierent power levels. They are
both biased with VDD=12.5V and VGG=5V. . . . . . . . . . . . . . . 9099 Output of oscilloscope with a square wave at the gate terminal. . . . . 91100 Close up of Fig.99 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91101 Measured data for the LNA of the P-sounder system. . . . . . . . . . . 92102 Test setup of the complete system test. . . . . . . . . . . . . . . . . . . 93103 Mechanical drawing of the power module box. . . . . . . . . . . . . . . 102104 Mechanical drawing of the power divider carrier. All holes are Ø2. . . 103105 Simulated and measured transfer response of distributed Rat-race coupler.104106 Simulated and measured reection coecients of distributed Rat-race
coupler. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105107 Amplitude dierence. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105108 Phase dierence. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105109 Layout of distributed Rat-race coupler. . . . . . . . . . . . . . . . . . . 106110 Layout of Wilkinson divider. . . . . . . . . . . . . . . . . . . . . . . . . 107
vi

111 Photo of lumped wilkinson divider. . . . . . . . . . . . . . . . . . . . . 107112 Layout of lumped Rat-race coupler. . . . . . . . . . . . . . . . . . . . . 108113 Photo of 180 hybrid coupler. . . . . . . . . . . . . . . . . . . . . . . . 108114 Layout of the 180 power divider. . . . . . . . . . . . . . . . . . . . . . 109115 Photo of the 180 wilkinson divider. . . . . . . . . . . . . . . . . . . . 109116 Layout of switch. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110117 Photo of switch. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110118 Test xture for the Foam antenna. . . . . . . . . . . . . . . . . . . . . 111119 Test xture for the Cavity antenna. . . . . . . . . . . . . . . . . . . . . 111120 Foam antenna. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112121 Cavity antenna. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112122 Drawing of transistor in its box. . . . . . . . . . . . . . . . . . . . . . . 113
vii

List of Tables1 Sample of other ice-sounding system specications. . . . . . . . . . . . 182 Comparison of power modules appropriate for the P-sounder system. . 273 LNA specications of the Comm-Connect 4028. . . . . . . . . . . . . . 294 Specication of circulators. . . . . . . . . . . . . . . . . . . . . . . . . 295 Ideal component values for Wilkinson power divider. . . . . . . . . . . 346 Comparison of reported Wilkinson dividers. . . . . . . . . . . . . . . . 347 Component values for Wilkinson power divider with SMD components. 368 Comparison of reported 180 dividers. . . . . . . . . . . . . . . . . . . 439 Component values for the ideal Rat-race coupler with θ = π/2. . . . . 4310 Component values for 2-section Rat-race coupler. . . . . . . . . . . . . 4511 Component values for the ideal Rat-race coupler with two sections. . . 4512 SMD component values for the Rat-race coupler. . . . . . . . . . . . . 4813 Comparison of reported 180 Wilkinson dividers. . . . . . . . . . . . . 5014 Component values for the ±90 sections. . . . . . . . . . . . . . . . . . 5015 Component values for the 180 power divider. . . . . . . . . . . . . . . 5016 Sample of commercial available switches. . . . . . . . . . . . . . . . . . 5417 Summery of SPST switches. . . . . . . . . . . . . . . . . . . . . . . . . 5918 Electrical specications of the UPP1001 PIN diode taken from the
datasheet. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6119 Extracted parameters for modelling the UPP1001 PIN diode. . . . . . 6520 Ideal component values for the λ/4 section. . . . . . . . . . . . . . . . 6621 Real component values for the λ/4 section. . . . . . . . . . . . . . . . . 6622 Dimensions of the Foam antenna. . . . . . . . . . . . . . . . . . . . . . 7623 Dimensions of Cavity Antenna. . . . . . . . . . . . . . . . . . . . . . . 8024 Data for dierent architectures. . . . . . . . . . . . . . . . . . . . . . . 10125 Web links to power modules. . . . . . . . . . . . . . . . . . . . . . . . 101
viii

1 AcknowledgementFirst I would like to thank the Department of Electromagnetic for letting me par-
ticipate in this interesting project about the P-sounder. Furthermore I would like tothank my supervisor Viktor Krozer for his valuable guidance whenever it was needed.Also a thanks to Jens Vidkjær for his guidance as well. All the guys at the mechanicalworkshop at Ørsted DTU: Jan, Frank and Martin, who helped me a lot with realizingmy drawings to something that could by build. This included manufacturing of thevarious boxes/carriers and not least the antenna test xture.
Last but not least a thanks to all my family and friends who have been a greatsupport whenever it was needed.
Lyngby, Denmark August 21th, 2006Thomas Sørensen Yassin
ix

Abstract
This M.Sc. thesis deals with the development of a compact front-end module forthe P-sounder system build at Ørsted DTU. The purpose of the P-sounder is to con-duct ice measurements in Antarctica to help develop a climate model.
The front-end architecture investigated here will be the basis of the P-soundersfront-end. The description of a front-end and the components necessary to constructthis is given. So far the trend has been to make one T/R (front-end) module anddistribute the power to several antenna elements. The focus in this thesis, is to builda front-end so compact that it can be integrated on each antenna patch. The com-parison between one and several T/R modules are given. The work in the thesiswill include the design of dierent power dividers such as Wilkinson and rat-racecouplers(hybrids) and power switch(SPDT). This includes the theory and physicalimplementation. They all have in common that they should be made very compactand handle large amount of power, therefore they have very small losses. Furthermoretests/measurements of power modules, low noise ampliers and antennas will be car-ried out. All simulations are carried out by Advanced Design System (ADS) 2004Afrom Agilent.
x

*List of Acronyms
ASIC - Application Specic Integrated CircuitCOTS - Commercial Of The ShelfCW - Continuous WaveDUT - Device Under TestFPGA - Field Programmable Gate ArrayGCPW - Grounded Coplanar WaveguideHEMT - High Mobility Electron TransistorHPA - High Power AmplierHTCC - High Temperature Co-red CeramicsLTCC - Low Temperature Co-red CeramicsIF - Intermediate FrequencyLNA - Low Noise AmplierPAE - Power Added EciencyPRF - Pulse Repetition FrequencySAR - Synthetic Apature RadarSLL - Side Lobe LevelSMD - Surface Mount DeviceVNA - Vector Network Analyser
xi

'Master thesis' August 31, 2006
2 IntroductionThe understanding of Antarctic ice is of great importance due to the climate
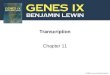
changes. The Antarctic ice has a thickness up to about 4500m and it can be seenas memory of up to 100.000 years of earths history. The Antarctic ice as well as theArctic ice caps is important to understand as the Earths climate and ocean circulationis dependent on these. The polar ice which is in constant motion, driven by windsand ocean currents often several kilometers every day, is inuencing the climate onearth by the heat exchange between ocean and atmosphere. It is believed that theice poles have a crucial eect on the global warming eect. During winters the icehas a tendency to reect most of the radiation. As some of the ice melts during thesummer periods, the ice has been replaced by the highly absorbing ocean. This leadsto a further increase in temperature and more of the ice melts. This can be seenas a positive feedback. A mapping of the Antarctic ice with its internal ice sheetsstructure, the ice sheet volume, ice ow velocity and its direction and history couldbe of great importance. The Antarctic ice consists of several layers. At the top isa relatively thin layer of snow, then ice that again can be split into several layersand on the bottom the bedrock. It is these internal layers, which are interestingto map. These are created by snowfall every year, which eventually sinks into theice sheet due to the load of the overlaying snow layers. The atmospheric processescontrol the snowfall and each snowfall has its own distinct chemical characteristicdue to atmospheric events. The internal ice layers are inuenced by three factors:changes in ice density(refreezing of melting water), changes in crystal orientation(iceow history) and changes in acidity due to ash layers(volcanic activities)[11]. The icereacts very slowly sometimes greater than 10.000 years, it is for this reason that theice contains such interesting information[1].
Figure 1. A mapping of the ice depth and mean temperature in Antarctica[1].
A mapping of the Antarctic ice with its internal ice sheets structure, the ice sheetvolume, ice ow velocity and its direction and history could be of great importanceto understand such eects as the rising of the sea level.
It is believed that a 3-D thermo-mechanical ice sheet model, can help to predict
Thomas Sørensen Yassin 1 of 113

'Master thesis' August 31, 2006
the ice past and future evolution, together with ice ow velocity and its direction. Tohelp develop such a model it is necessary to rst make a 3-D image of the state of theAntarctic ice, this should include the ice thickness, internal layers and ice dielectricproperties to better understand the dynamics of the ice described above[12].
There are several diculties that need to be considered. The ice cover dimensionscan vary a lot over very short distances. This means from open water to ridges of10's of meters of thick ice. There are also small-scale changes in the ice itself. Duringfree-up brine gets entrapped in the ice and this leads to changes in its properties suchas temperature. Moreover the ice reections are dependent on the surface roughnessof the air-snow, snow-ice and the ice salinity, which all make it more complicated tomake a model of the ice[13].
To make this model, the required data can only be gathered from a spacebornesystem. This is due to the fact that only a satellite in space can make a complete andhomogenous coverage of the ice with enough resolution. To make this model, a fre-quency of 435MHz in the P-band was chosen. Frequencies at UHF are well suited forsatellite communication, as the radio waves are not reected by the ionosphere backinto space. Although there has been suggested a system to measure the ice sheets,the problems such as ambiguous surface returns, depth of the ice, Faraday rotationand sensitivity, has delayed the system implementation [14]. The problem arises fromthe operating frequency of 435MHz. It is unknown how the ice reacts to the P-bandfrequency. For this reason ESA has suggested an airborne demonstrator P-band icesounding radar, that will hopefully come up with valuable experience and possiblymake solutions to the already mentioned problems. It is hoped that it can lead to animplementation of a spaceborne P-sounder radar system.
2.1 Operating descriptionThe complete P-sounder should be implemented as a nadir-looking circular polar-
ized pulse radar with pulse compression and Doppler processing capabilities. Pulsecompression can be used to modulate a long in frequency, to obtain the same resolu-tion as short pulse but without the bandwidth reduction. Doppler processing is usedto remove clutter. The P-sounder will employ fully polarimetric data by transmittingon one channel and receiving on both channels. This mean that the eective PRF ishalf of the transmitted PRF.
This project deals with the design of the front-end of the airborne P-band icesounding radar demonstrator system. This includes the design and fabrication of thesystem components like antennas, power ampliers, switches and couplers. It shouldbe mentioned that when ever possible the utilization of COTS is preferred. The P-sounder will use one or more calibration loops, which will be based on the procedureused in [3]. These loops can also be used for test and signal equalization.
The requirements for the whole system is given below:
• Center frequency: 435MHz
• Bandwidth: 80MHz
• Output power: 300W (complete array) approx. 75-80W per patch.
Thomas Sørensen Yassin 2 of 113

'Master thesis' August 31, 2006
• Pulse length: 33 ns-50µs
• Pulse repetition frequency(PRF): up to 10KHz
• Duty cycle: 10-40%
• Max. operating altitude of 7000m
The scope of this project is the design and assembly of one front-end module.This system should operate at a center frequency of 435MHz and with a bandwidthof 80MHz. It utilize a pulse width of 100µs and a PRF of 10KHz. Each pulse has amaximum power of 80Watts.
The thesis is divided into the following chapters: chapter 3 is explaining the front-end and dierent implementation methods. Chapter 3 is covering all the necessarycomponents for implementation and calibration. A comparison between the P-sounderspecication and other reported ice sounders are the subject of chapter 4. The opera-tion of the P-sounder system is the subject of chapter 6. The power module and LNAis COTS component and the selection on these two components is given in chapter8. Chapter 9 to 11 deals with the design of power divider, coupler and switch respec-tively. The antenna design and measurements are given in chapter 12. Measurementsof the power module and LNA is given in chapter 13.
Thomas Sørensen Yassin 3 of 113

'Master thesis' August 31, 2006
3 System ArchitecturesA front-end module is always present in modern communication systems like cel-
lular devices, radar systems and wireless systems. The "front-end" term means ev-erything there is between the antenna and the IF stage. The components introducedin the front-end are usually made up from lters, mixers, switches, HPA, LNAs andmatching networks. It goes without saying that the front-end is perhaps the mostimportant structure in a communication system as this is where the information ishandled last before going out and rst when it is received. This means that everycomponent in the front-end must be optimised to work at their best.In this project the purpose of the front-end module is to direct a signal, which candetect the ice thickness as well as the internal layers. To do this, a pulse/chirpis generated which needs amplication and sending it thereafter to the antenna fortransmission. When the pulse has been sent from the antenna and the desired reectedsignal has been received, the front-end module must direct this to further signal pro-cessing. A basic conguration on how a complete transmit/receive module could looklike is shown in Fig.2.
HPA
LNA
Switch
Antenna Receiver
Transmitter
Figure 2. Simple block diagram of a front-end module.
The front-end in Fig.2 is made up by the LNA, HPA and switch. Although thisseems as a very simple task to construct, but there are several hidden aspects thatneed to be considered. Diagrams like the one in Fig.2, are often seen in books andpapers. The boxes representing ampliers and switches are usually assumed to bebehaving ideally. In real life each box can hide a very complex circuit, which be-haves less ideal i.e., introduce losses, distortion, matching problems, power handlingissues, bandwidth limitations. In the subsequent chapters some of these issues will beaddressed. Furthermore dierent system architectures will also be described.
3.1 Transmit/Receiver modulesThere exists numerous ways of implementing a front-end depending on the appli-
cation. What all the dierent architectures have in common is that they must directa signal to some radiating device. The same front-end must also receive the signaland direct it to further processing without distorting the signal to much.The following is some of the features normally characterizing a T/R module:
• Power amplication of signal power
• Amplication of received signal
• Several polarization outputs
Thomas Sørensen Yassin 4 of 113

'Master thesis' August 31, 2006
• Temperature stability of transmitted power and phase
• Temperature stability of receiver gain and phase
• High power added eciency (PAE)
• Low mass
3.2 Small T/R modulesSo far the general trend in RF communication system designs, have been to have
only one front-end module whether this is used in a single antenna system or a systemwith antenna arrays. For a system with several antennas that needs to be excited,a power distribution network has been necessary. However in recent years there hasbeen focus on developing small T/R(Transmit/Receive) modules that could replaceone large high power module with many smaller low power modules. There has beenseveral reports on architectures especially in X and S band, where many small T/Rmodules have been utilized [15, 16, 17, 18, 19]. The X and S-band have allocatedfrequencies between 8-12GHz and 2-4GHz respectively. The X-band is mainly usedfor satellite communication and radar applications. The S-band is used mainly forsatellite communication, weather satellites and wireless applications. Antennas in theX-band can be made very small due to the frequency. So when they are used inphased arrays or large antenna panels where there can be hundreds or even thousandsof antennas, each of these with their own T/R module. Such an example is shown inFig.3.
Figure 3. Example of architecture using several T/R modules[2].
where each square is a patch antenna and the diagonal rectangles represent T/Rmodules. To justify this large amount of modules it is required that they must below cost eective, mass eective, available for large scale production and ecient.Recently the ability to make very small integrated modules has made this kind ofarchitecture very attractive. The most favoured technologies are LTCC/HTCC andMMIC(GaAs) technologies[15, 20]. To have low mass modules is imperative whenused in space applications, meaning that these sometimes have to weigh less than<100 g, but they must still be able to operate as fully functional power T/R modules.Shown in Fig.4 is an example of a T/R module used in a space based radar activephased array.
Thomas Sørensen Yassin 5 of 113

'Master thesis' August 31, 2006
Figure 4. Example of architecture in small T/R module[2].
This small T/R module contains the same functionality as a high power modulewould. It provides gain, power and phase control to both transmitter and receiversignal path. There is one switch that selects if the module has to transmit or receivedata. This is then passed through the power amplier(Tx) and through the circulator,before a switch decides which polarization is to be excited. The receive path is justthe opposite, only now the signal is passing through the LNA(Rx). The FPGA is usedto control attenuator and phase shifters for scanning purposes. The only dierencebetween this architecture and one with only one T/R module, is the power level ofonly a few watts. This is achieved on a circuit board with the dimensions of only 106 x48mm. A summery of dierent modules and their specications is given in Table.24.The table shows that quite a few of the modules produce very low power levels whichis possible to make in MMICs or other integrated structures. The compact nature ofthe modules make them have extremely low weight.
There are several advantages of using small power T/R modules:
• Losses in the distribution network can be minimized by placing the T/R moduleclose to the antenna.
• More cost eective than using one or several high power ampliers.
• Easy to replace modules for maintenance.
• Easy to implement phased arrays.
These are just a few of the advantages, whether this is for space borne or SAR ap-plications. Space borne radars are very power limited, but are compensated by havingvery large gain antennas because of no space limitations. Therefore it is necessary tohave many T/R modules. The T/R module is the device with the most inuence onthe power dissipation and power generation requirements of the whole system. If onehigh power module was used, a power dividing/combining network would seriouslydegraded the eciency and noise performance due to losses in the network. Usingseveral high eciency T/R modules can reduce this eect. It is however not an easytask to implement thousands of T/R modules in a radar system. Below is listed someof the diculties, which need to be considered:
• Component variations over temperature.
Thomas Sørensen Yassin 6 of 113

'Master thesis' August 31, 2006
(a) (b)
Figure 5. Amplitude and phase as a function of frequency for 14 T/R modules [2].
• Calibration can be dicult.
• Bias supply variations over large array structures.
• T/R modules mismatch can have negative eect on SLL.
The main task in having many T/R modules is to have them stabile over temper-ature and compensating for variations in components. The problem arises when thereare variations in the power devices of each module and uctuations in the switchingpower supplies. This give pulses that vary in amplitude and phase from pulse to pulse,which will make the antenna array exhibit loss of gain and increased side lobes. Thethermal variation is an important cause of instability of T/R modules and is sensi-tive to burst with very wide pulses(150µs to 200µs) and large duty cycles(more than10%). Fluctuations in the power supply are characterized by ripple and slow varia-tions of the bias during burst[17]. For this reason an elaborate calibrations system isrequired. This generally has to be used during every transmitted pulse. To see thiseect, Fig.5 shows the measured amplitude and phase response of 14 "identical" T/Rmodules.
It is evident that there is approximately 2 dB spread in gain between modules anda 40 degree phase dierence. In phased arrays where there are both amplitude andphase shifters, this can course an even more dicult task, as phase shifter not only willchange phase but may also have a small impact on the amplitude. This is caused bythe length of circuit path, which is longer at higher attenuations. This of course alsoapplies for the amplitude shifter(attenuators). These eects can only be corrected bycalibration. One way to make a calibration is to use a Look Up Table. The table shouldcontain the measured data measured under circumstances closest to their operatingenvironment. The basic idea is to make a reference measurement of a module andthen use this as the "original state". An example could be to set a module to acertain attenuation level, this is then measured and recorded as the "original state".When the system requires this state on some of the T/R modules the idea is to haveall modules respond in the same way to the wanted amplitude and phase setting. Adisadvantage is that some dynamic range has to be sacriced. A detailed descriptionof this procedure can be found in [21, 2]. It should be mentioned that although itsounds appealing, the fact is that this is dependent on temperature. Meaning thatcalibration circuits are themselves made from circuit elements like transmission lines,couplers etc. and these are also temperature dependent.Not only temperature has an impact on SLL, also the degradation and replacementof T/R modules together with the mismatch between antenna and T/R module, areinuencing the SLL. This means that the array calibration is no longer valid. To ensure
Thomas Sørensen Yassin 7 of 113

'Master thesis' August 31, 2006
Figure 6. Example of front-end using one high power amplier.
a satisfying operation, it has been reported that the T/R modules should either beelectrically identical or have a match better than a certain value at all antenna ports.The rst method is unrealistic but the second method is realistic and also proves tobe useful. This means that a certain amount of modules can be replaced and as longas amplitude reection is within a certain limit, a new array characterization is notnecessary[22].
3.3 One vs. several T/R modulesSo far the discussion has been concerned with T/R modules at high frequencies
and space applications. But the same advantages and disadvantages apply at lowerfrequencies such as in the P-band. The conventional architecture is to use one highpower amplier and then a distribution network as mentioned previously. As with themany T/R modules have the calibration as a disadvantage, the single T/R module hasthe power amplier as its main disadvantage. The P-sounder system, which requiresin the region of 300W, puts its demand on a suitable power amplier. If this isthe necessary power needed at the antenna for radiation, then the amplier shouldgenerate even more power. This is due to losses in distribution network. Using severalsmaller power modules, makes it possible to place these close to the antenna. Alsoin land based arrays it is easier to repair or shift defect modules and still maintainfunctional operation of the system. However the main concern with only one T/Rmodule is to obtain such a high power amplier. It is possible to buy one althoughthis is an extremely expensive component as it has to be more or less custom made,because of power, frequency and bandwidth requirements. Ørsted DTU has at themoment ongoing research on making such an amplier, this is however not a part ofthis project. By looking at Fig.6 another issue can be addressed.
This gure illustrates how a front-end architecture could look. Here two antennaswith two polarizations are shown. To excite one polarization it requires the outputpower from the HPA to go through two switches and a circulator. It goes withoutsaying that these should be able to withstand the full output power of the HPA. Ofcourse the power would be pulsed, which will reduce the average power considerably.To nd switches and circulators that can handle large average powers are dicult asthese are usually expensive and have to be custom made. Because of the power levelthe switches and isolators also need a substantial amount of isolation so they willnot destroy the LNA. Besides this the insertion loss of the switches is critical. The
Thomas Sørensen Yassin 8 of 113

'Master thesis' August 31, 2006
resistor/attenuator is used for calibration purposes.In this project the module has the sole purpose of directing the pulse generated
by the DGG to the antenna. And to direct the received pulse to the DFE.
4 System componentsThe design of the P-sounder T/R module is compromised at many dierent areas
of RF electronics. This section will provide an overview of the dierent componentsnecessary to implement the front-end module.
4.1 SwitchThe switch is a necessary element in many applications as this can turn on/o
other devices electronically. It can also be used to isolate devices and to minimize asystem by making it possible to use the same signal path for one device at one timeperiod and to make the same path available to another device in another time period.The front-end in this project utilizes two switches: a low-power and a high-powerswitch. The high-power switch is used to direct the transmitted power to either the Hor V polarization channel of the antenna. The low-power switch is used to direct thereceived signal to the LNA and to isolate the LNA during transmission. Without theswitch you would properly also have needed two sets of antennas, one for transmissionand one for receiving. Because the isolators would have isolation in the area of 20 dB,they would not provide sucient isolation alone. For this project this would simply nothave been possible as there is no space available on the aircraft for an extra antennaarray. This shows how important the switch element is. However the switch is not anideal element and two things can seriously aect operation of a system and that is theisolation and insertion loss of a switch. The isolation is not innite, so a leakage signalwill reach the "isolated" port. The insertion loss is not critical in the transmit modeof operation for the high-power switch, but of course should be as low as possible.In receive mode however the switches in front of the LNAs, are directly inuencingthe noise gure. This is directly related to the insertion loss of the switches[7]. Theisolation is also critical when high power is involved. It can be seen in Fig.6 thatthe isolation between the output of the HPA and the input of the LNA in transmitmode is dependent on the circulator and the switch. The circulator usually have anisolation of 20 dB. This means that the low-power switch should provide a substantialamount of isolation to prevent the LNA to be either saturated or damaged, that wouldseriously aect the quality of the received information. Ultimately the switch shouldprevent the LNA from hazardous overload that could lead to permanent destruction.
4.2 High Power AmplierTo detect a target from a large distance or detecting a very small object demands
a great deal of power. The HPA in this project is used to amplify a pulse to havea combined maximum peak power of 300W. In Fig.8 is shown only one front-endmodule. The nal P-sounder will employ four such front-ends as the gure also notes.The HPAs only purpose is to increase the power of the generated pulse from the DGGso that it is suited for detecting the required objects. The eciency of the module isalso very important, as this have the largest inuence on the power consumption ofthe whole front-end. The bandwidth of the pulse is directly inuencing the choice of
Thomas Sørensen Yassin 9 of 113

'Master thesis' August 31, 2006
HPA, which requires the same bandwidth. HPAs can be constructed in dierent waysand some of these are discussed in Section 7. Although the HPA in this project willbe a commercially available model.
4.3 Low Noise AmplierIn applications such as radar systems and mobile telephones, it is often such that
the received signal can be of very low power levels. The problems arise when thishas to be detected in the presence of noise. In this project the same very low powerlevel will have to be picked up by the receiver. After the signal has been travellingfrom the antenna to the bottom of the ice layers and back, the power level is reducedconsiderable but it still has to be detected in the presence of noise. Unless the front-end is cooled down to the absolute temperature of -273K this will also introducenoise.
4.3.1 Noise FigureNoisy networks can be characterized by either an equivalent noise temperature or
a noise gure. The noise gure(NF) F is dened by Eq.(1)
F =Si/Ni
So/No≥ 1 (1)
where Si and Ni are the signal and noise input powers and So and No are the signaland noise output power. If an amplier amplify the signal and noise power equallyand do not introduce any noise itself then the noise gure would be 1 as given byEq.(1). If the amplier is noisy then it will increase the output noise further and theoutput SNR will decrease and F will exceed 1 or 0 dB. The low noise amplier(LNA)is a special amplier especially designed to introduce as little noise as possible. Theimportance of having a LNA as close to the receiving point as possible, becomes clearwhen evaluating Fig.7
Figure 7. Cascaded network.
where G is gain, F is the noise gure and Te is the equivalent noise temperature ofthe system. The input noise power is dened by Boltzmans constant(k), T0 is 290Kand B is the bandwidth, which usually is the bandwidth of the component or system.
N1 = kT0BG1 + kTe1BG1 (2)
N0 = N1G2 + kTe2BG2 (3)Inserting Eq.(2) in Eq.(3) gives the following expression
Thomas Sørensen Yassin 10 of 113

'Master thesis' August 31, 2006
kToutB = kT0BG1G2 + kTe1BG1G2 + kTe2BG2
Tout = T0G1G2 + Te1G1G2 + Te2G2
Tout = G1G2
(T0 + Te1 +
Te2
G1
)(4)
where the eective noise temperature of the cascade is given by Eq.(5)
Teff = Te1 +Te2
G1(5)
It is seen how the noise temperature of the rst stage is dominating. The followingstages are reduced by the gain of the rst and following stages.
The conversion between noise temperature Te and noise gure F is given by Eq.(6)
F = 1 +Te
T0⇐⇒ Te = (F − 1)T0 (6)
By considering the cascade system in Fig.7 the NF of a cascaded system can beestablished by using Eq.(5) with Eq.(6)
F = F1 +F2 − 1
G1(7)
For an arbitrary number of stages this can be extended to the following generalexpression
F = F1 +F2 − 1
G1+
F3 − 1G1G2
+ · · · (8)
This shows a very important feature, that the rst few networks are the dominantfactor of the overall NF. The later networks are reduced by the product of the gains ofthe rst stages. So to reduce the overall NF it is important to have a device with a lowNF and the highest possible gain as the rst stage. This is why the LNA is well suitedfor this purpose. The optimal solution is to have the LNA as close to the antenna aspossible. However in real systems such as the ice sounder, this is not always possibleand the LNA have to be proceeded by cables and switches/circulators. To see whythis degrades the NF, it is necessary to evaluate Eq.(9), which describes the NF of alossy network
F = 1 +Te
T0= 1 + (L− 1)
T
T0(9)
where L=1/G is the power loss factor and T is the physical temperature of thenetwork. When the network has temperature of T=T0, then the NF is F=L. If thetemperature T is higher than T0 then the NF increases further. Eq.(8) show howa lossy network not only is directly adding to the overall NF. It also "boots" thefollowing stages until a gain stage is reached. Since cables, switches and circulatorsor other passive devices cannot be avoided before the LNA, these can have a directinuence on the NF and have to be considered when the overall system design is done.
Thomas Sørensen Yassin 11 of 113

'Master thesis' August 31, 2006
4.4 Digital Signal Generator (DSG)The DSG functions, as its name suggest, as a waveform generator. This could be
the transmitter shown in Fig.2. Pulses can be downloaded to the DSG memory froma PC and then converted into a real analogue signal. The DSG has a 12-bit digital toanalogue converter at 1250MHz. Therefore any transmitted pulse, directly on carrierfrequencies up to 625MHz is possible. The pulses are stored in SRAM and fed tothe DAC by an FPGA. The SRAM can store up to 1.5 million samples correspondingto a total pulse length of 1200 microseconds. The SRAM can also store up to 512dierent but shorter pulses. The DSG for the P-sounder project will be a copy of analready designed and tested DSG used for the SAR++ project. Therefore almost nohardware changes are necessary to implement this in the P-sounder project.
4.5 Digital Front End (DFE)The DFE is likewise designed and tested for the SAR++ project at Ørsted, DTU.
The DFE could be the receiver in Fig.2. The DFE must collect the received analoguesignal and digitize this. The DFE oer input sampling frequencies up to 600MHz,100MHz and 1500MHz. The analogue bandwidth is 2.2GHz this means that it cansample any bandwidths below 300MHz, 500MHz and 750MHz. The digital output ofthe ADC is fed to an FPGA for further processing and buering. The DFE also hasSRAM, which can be used to perform Doppler ltering for SNR improvement, clutterreduction and data rate reduction.
4.6 AntennaThe antenna is a very important device. The antenna is determining the way the
pulse energy is distributed and collected in space. The radiation pattern is alwaysapplication dependent. Sometimes a high gain antenna is wanted like in radar ap-plication. In other applications the opposite is the case and a more omni directionalpattern is needed, this could be mobile communication. For the P-sounder the an-tenna has to be well considered as the radiation pattern has to have certain propertiesregarding clutter suppression and the necessity of placing this on an airplane. Section12 will deal with the P-sounder antenna.
4.7 P-sounder architectureThe architecture for the front-end module for the P-sounder will be based on
having several medium power T/R modules on each antenna patch. This will eliminatea lot of the problems discussed in section 3.1. In the complete P-sounder there willbe four antennas with a corresponding T/R module for each antenna. This sectionwill give a description on how the whole system is connected. The architecture willbe slightly dierent than Fig.6. There will not be any calibration paths in this gure.But it shows the building blocks that will be the basic of this thesis. The T/R modulefor the P-sounder can be seen in Fig.8.
The basic operating of the P-sounder is as follows: The signal from the DSG issent to a pre-amplier(driver) where the signal is split up into four and passed to theHPAs. Two HPA and two power dividers/combiners are used to generate the sucientpower. The rst power divider will be a low power divider, whereas the second is ableto handle higher power. Each antenna has two polarizations, one horizontal and one
Thomas Sørensen Yassin 12 of 113

'Master thesis' August 31, 2006
Figure 8. Illustrating the P-sounder architecture. This is showing only one patch.
vertical. This is necessary to generate full polarimetric data necessary to synthesize acircular polarized signal. This is done by transmitting on either of the channels andreceiving on both simultaneously. The switch(Sw 1) is determining which channelis transmitting from pulse to pulse. This is then passing through the circulator tothe antenna. On reception the signal is picked up by both channels(H and V) andgoing through the circulators to the LNAs for amplication before reaching the DFE.Some of the problems regarding isolation have already been discussed, but in Fig.8two switches (Sw 2 and Sw 3) have been placed before the LNAs. This is to protectthe LNA for overload on transmission. Another solution could have been to place alimiter, which is simply a diode in shunt conguration, which begins to conduct whenthe power is suciently large. Both solutions will give an increase in noise. The twoswitches before the LNA is either connected to the LNA input or to an absorptionload. The antenna is not ideal, which means that some power will be picked up bythe other port during transmission. This could, as just explained, have a bad impacton LNA saturation, but it could also have negative inuence on the antenna pattern.The load assures that this stray signal is dissipated instead of being reected backto the antenna or arrive at other unwanted places in the circuit. Other interestingfeatures are the placement of the HPA and switch(Sw 1). As it is shown in Fig.8 theswitch needs to be able to withstand more average power. By changing the order ofthe switch and HPA, a low power switch, which usually also is faster, can be usedinstead. However this will double the amount of HPAs.There are also another issues regarding the reception, because there is only one DFE.Because there already existed one DFE at Ørsted DTU and building another wouldtake considerable time and money, the decision to have only this one was chosen.Each DFE have two A/D converter channels. Having eight channels, two from eachantenna, it is obvious that some kind of time multiplexing is necessary to select thewanted channel information. One way to introduce this is to have a network whereeach sub-aperture is connected to one A/D converter. This is shown in Fig.9. Theantenna arrangement is shown in Fig.14.
The input to each LNA from top too bottom in Fig.9 is arranged as follows:Combined V of sub-aperture A, combined H of sub-aperture A. The next two is the
Thomas Sørensen Yassin 13 of 113

'Master thesis' August 31, 2006
Figure 9. Receive conguration for the P-sounder
combined V of sub-aperture B and combined H of sub-aperture B. Depending onthe switch positions, the A/D converters can either detect the combined H or V forboth sub-apertures or detect the individual combined H and V components for eachsub-aperture. It is apparent that it cannot detect all of these at the same time, onlytwo of the combinations are available for each pulse. This is a valid operation as it isexpected that the reections from the ice will not change abruptly from pulse to pulse,therefore this approach is accepted, however it will make the mapping less precise.There are six dierent signal combinations that can be received. If we want to receivethem in cyclic manor, the rst four switches do not need to be very fast and thesecan be mechanical switches. The two switches in the center most be faster as thesewill have to switch between the two polarizations in each sub-aperture. The last twoswitches do not need to switch very fast either. As shown in Fig.9 mechanical switchesare used where speed is not critical. This has the further advantage that mechanicalswitches is less lossy.The signal from the co-polarization is also stronger than the cross-polarization whichis an issue regarding the SNR. It should also be mentioned that when then combinedH or V signal from aperture A is combined with the combined H or V signal fromaperture B, these are not equal. This is because the sub-aperture radiation patternis not the same. It goes without saying that there exists several other possibilities ofcombining the signals. Another combination is a network comprising of only switches.Here all the individual polarizations can be measured, but then the combined V orH polarization of the combined sub-aperture cannot be chosen. It all comes down towhat kind of signal combination is wanted for the signal processing. So a trade o isnecessary.
4.7.1 P-sounder Calibration procedureThe purpose of calibration can be spilt into two kinds: 1) conversion of the radar
output units into predetermined reference units 2) measurement of the dynamic systemcharacteristics. It can also be seen as a way to determine the transfer function of thecomplete system and a predened reference system. In a conventional system with
Thomas Sørensen Yassin 14 of 113

'Master thesis' August 31, 2006
Figure 10. The calibration loops of the EMI SAR [3]
one T/R module a dedicated calibration path is used. This has to include as manysystem components as possible. The possible drifts in the transfer function can thenbe compensated by signal processing. The P-sounder calibration procedure will bebased on the same technique used for the SAR++ system[3]. Here three internalcalibration loops are employed to completely characterize the system. This has theeect of being less dependent on external calibration targets. The calibration loopscan be seen in Fig.10
The switches have two positions as shown in Fig.10. These are illustrated as eitherbold or shaded. There is three calibration loops:
1. Normal: The receivers are fed(through the calibration attenuator) by a sampleof the transmitted pulse (bold TX switch, shaded RX switches)
2. Extended outer loop: The pulse from the upconverter is routed directly viaa directional coupler in the TX through the polarization switch toward theantenna where it is reected, by means of shorting switches, back through thepolarization switch to the receivers(shaded TX switch, bold RX switches)
3. Extended inner loop: The receivers are fed by a sample of the upconverterpulse(shaded TX and RX switches)
A replica of the transmitting pulse is also used for calibration purposes. This canmake an amplitude and phase calibration over the full spectrum and of almost thecomplete system. The drawback is the need to do this between each pulse. Also theantenna cannot be calibrated and has to be done in an anechoic chamber. This meansthat the system must be very stable between pulses. But it is a smart way of knowingexactly how the system performs to the transmitted waveform. Other reports areusing an out of band calibration tone. This has the advantage of calibrating whiletransmitting, but the disadvantage is a calibration with a tone that is out of thefrequency band meaning that the components will be calibrated by a tone not usedby the system. This will of course lead to some inaccuracy of the system calibration.But the two methods have their own benets and disadvantages. These two methodsapplies to the calibration of a single T/R module. The use of several T/R modulescomplicates the procedure of calibration, but it is not impossible.One such method is the Pseudo noise(PN) gating method. This can characterize
Thomas Sørensen Yassin 15 of 113

'Master thesis' August 31, 2006
Figure 11. Superposition of all the T/R modules, where each module is scrambledby its own code sequence.[4]
several T/R modules even individually under operation conditions. The calibrationworks by having the control electronics change the phase on each T/R module shiftedby ±π/2 between successive pulses according to a certain PN sequence. This meanthe phase characterization measurement plus the phase shift of ±π/2. This could looksomething like shown in Fig.11
The output will be a superposition of signals from all the T/R modules each withits own PN sequence. The overall signal can be simulated to the expression in Eq.(10)
sc(t) =NT/R−1∑
i=0
ci(t)aiexp(jϕi) + ni(t) (10)
where the complex signal of the j th T/R module
sj(t) = ajexp(jϕi) (11)the corresponding noise sequence cj(t) and in consideration of noise nj(t) and N isthe number of T/R modules. The idea is that the extraction of information of onemodule can be done by correlating the overall signal with the PN sequence of thatparticular module, expressed by Eq.(12).
CCFj(τ = 0) =∫
sc(t)cj(t)dt = s = ajexp(jϕi) (12)
This removes the PN modulation and the complex peak is an estimation of theamplitude and phase settings on the respective T/R modules (aj and ϕj). It hasbeen reported that the characterization 384 T/R modules have been characterizedwith an accuracy of 0.04 and an amplitude accuracy 0f 0.2 dB. This was done witha Walsh code, which has no cross correlation [4]. Using this method it is possible tocharacterize individual modules under normal operation.
Thomas Sørensen Yassin 16 of 113

'Master thesis' August 31, 2006
5 P-sounder component specicationsAll of the component just discussed will have their specication determined by the
power available at the output of the DSG, the power needed for mapping the ice andthe power received at the DFE. This is mainly dependent on the properties of theice, which in terms determines the overall specications of the complete system. Thethickness of the ice and the resolution of the internal layers, are determining whatfrequency and pulse length are appropriate. Here it has been shown that frequenciesof tens or a few hundred MHz can be used to sound ice bodies many kilometers inthickness[23]. Whereas low frequencies (1-100 MHz) have a low dielectric loss, it lacksthe resolution of microwave frequencies (>2GHz) but poor return loss. This is usuallywhy a compromise between the two regions is made. The pulse length is determiningthe resolution in the ice, which again is having an impact on the average power needed.The power needed is also a function of the ice thickness and ight altitude. To be ableto map through all the ice layers, up to several kilometers, sucient power is needed.The receive side is also dependent on the thickness of the ice. There should be alarge dynamic range to detect the strong near surface returns and the weak returnsexpected many kilometers below the ice[23]. Sometimes the range can be to large forthe ADC that some kind of gain control in the receiver chain is necessary. This meansa reduction or no gain when signal is received from the top and shallow layers.
The specications require a maximum output power of some 300W total, indi-cating that each patch should radiate some 75W. The output power of the DSG isusually in the miliwatt range, meaning that the HPA should generate the 75W ofpower. Unless some really high gain HPA is used, it is usually necessary to use adriver-amplier in front of HPA, to generate the wanted input power level. Withonly 75W needed, it is believed that medium range power modules can be used. Onemodule could have the potential of producing the required power, but would properlyalso be very close to its compression point. For this reason two power modules eachgenerating 35-38W, are used in parallel and power dividers/combiners are used tomake the dividing/combining. By applying the same input power we receive the sameoutput power as with one module, but each power module are now operating furtherfrom its compression point. By introducing power dividers/combiners the loss con-tributors are also increased. These should have as low loss as possible. This is veryimportant as they will handle high power ratings, making the component selectionimportant to increase the system eciency.
It goes without saying that the other two passive system components, switch andcirculator, should also have as low loss as possible. The high power switch should havea very low insertion loss, able to handle high power and be very fast. The two lastrequirements are usually dicult to obtain at the same time, which mean a compro-mise is necessary. Commercially available switches can have an insertion loss around1 dB and can be very broadband. Circulators are capable of having low insertion lossin the region of 0.4 dB and handle high powers. The other critical requirement is thebandwidth of 80MHz. This will be shown to be a challenging parameter for someof the components. The P-sounder antenna will also have to be very ecient andthe bandwidth requirements are especially critical for the impedance bandwidth. Itis important that a minimum of power is reected back during transmission to ful-ll the necessary transmitted power requirements and to have the transmitted signalwaveform as at as possible. Reected power would also be very unpleasant to have
Thomas Sørensen Yassin 17 of 113

'Master thesis' August 31, 2006
Article Frequency Ptrans PRF NF Smin BW Flight alt. Penetration Resolution Tp
[24] 1257.5 10 1kHz 2.5 -88 dBm 270 0 250m 0.63m 500 ns[25] 150 200 ≥4kHz - - 15 460-900 ≥2 km 10m 100ns-50µs[23] 50 100 1.5-2 - - 1 100-300 km ≥20 km 100m -[26] 50-200 50 - - - 150 space-based ≤5000m 1m -
Table 1. Sample of other ice-sounding system specications.
in the system, which could give false echoes or even damage the receiver. A returnloss of ≥15 dB for the antenna across the whole bandwidth has been sat as a goal forthe antenna. In Table 1 is given a small summery of the overall specication on otherice sounder projects.
Although some key gures are missing, some specications can be compared. Atransmitted power of several hundreds of watt is common when operating at highaltitudes. It can be seen that the sounders operating at high altitudes are usingeither large transmitted power or a low frequency for penetration. Also the depth ofpenetration is dependent on frequency and power. The maximum power of the P-sounder of 300W ts well with these requirements. The fractional bandwidth of 20%of the P-sounder is in the high end, of what is being reported. This is also the mustdicult feature to obtain. Compared also to the T/R modules in Table 24, severalof these modules have fractional bandwidths in the area of 15% and only one above20%. But it is dicult make a comparison as the operating frequency is much higherfor these modules. The output power is also much lower. Another interesting thing isthat many of the modules use a xed pulse width, which in many cases is very small.Together with a low PRF, it gives a low duty cycle.The receiver NF were in many cases not specied for the ice sounding systems inTable.1. The T/R modules in Table 24 had their NF specied to a maximum of4.5 dB. It is believed that the NF for the P-sounder should be even lower, as a NF of4.5NF can not be considered low.
The overall specication for the P-sounder is not a trivial task to meet. None of themodules or ice sounder systems have specied anything about amplitude and phase.The P-sounder has a very strict amplitude variation requirement, with a maximumof 0.1 dB. The dicult requirements, are without a doubt the bandwidth and a smallamplitude variation.
5.1 SummaryTo summarize this section, it has been found that smaller low power T/R modules
have a lot of advantages, such as easy integration, replaceability, cost eectivenessand low loss. The main disadvantage is the calibration process, but this can be madeas several articles have shown. It requires a quite complex calibration procedure, butstill its features are very appealing. Furthermore has the P-sounder architecture beenpresented. The components necessary for implementation have been introduced.
Thomas Sørensen Yassin 18 of 113

'Master thesis' August 31, 2006
6 P-sounder operationIn the previous sections the description of the architecture and operation of the
T/R module has been described. This chapter will bring all of this together by givinga functional description of the P-sounder system under operations.
6.1 AircraftThe complete system should be mounted on a plane, which should be capable of
operating in polar regions like Antarctica and the Arctic. One airplane used exten-sively by Ørsted DTU for the SAR++ missions, is the DC-6 Twin Otter. Below inFig.12 is shown a gure of the twin otter together with possible placements of theantenna array.
Figure 12. The Twin Otter airplane seen from above with possible antenna place-ments. The structures are up to scale.
As seen there are two placement possibilities either under the wing or under theaircraft body. Placing the array under the aircraft body has the advantage that theelectrical and mechanical parts are easier to access. But as can be seen this also meanthat the antenna extends beyond the aircraft. There will be some simulation of theantenna and the aircraft to see how the antenna is inuenced by the aircraft.
6.2 Clutter suppressionWhen measuring the ice thickness, it will not only be reections from the wanted
ice layers that are picked up by the P-sounder. Signals that are picked up, butnot intended are called clutter. Clutter is usually strong enough to hide the desiredsignal. The clutter could be the rst reection when the pulse strikes the ice surface,strong signals from the bedrock or simply signals that are picked up because theantenna pattern is not ideal, meaning it has sidelobes and do not see only in thenadir direction. The P-sounder system should be able to reduce the clutter from thefollowing directions:
• clutter from the surface in the two across track directions
Thomas Sørensen Yassin 19 of 113

'Master thesis' August 31, 2006
Flight direction
Along track
Across track
Figure 13. Illustrates the ight direction and the dierent across and along track.
1 2 3 4
A B B A
Figure 14. Showing the P-sounder antenna array divided into two apertures, A andB.
• clutter from the surface in the two along track directions
• clutter from the near-nadir surface overlaid through pulse sidelobes
These directions can be identied in Fig.13, where the nadir direction is into thepaper.
It is possible to reduce these unwanted signals. Clutter from across track can beeliminated by having an antenna with a large across track dimension, which producea narrow beam in the across-track direction. Furthermore the antenna will be taperedto reduce the side-lobes. The along track clutter will be eliminated with Dopplerprocessing. The main contribution to clutter comes from the nadir direction. This callsfor special design considerations. The P-sounder will be using a clutter suppressiontechnique, which uses its antenna array to suppress clutter in the receive mode. Theprocedure is to divide the array up into two sub-apertures. This will be done byforming a sub-aperture of the two center antennas and likewise with the two outerantennas, shown in Fig.14.
By adding the two sub-aperture the main beam should be formed. The dierencebetween the two sub-apertures should provide a dierence pattern with a null in the
Thomas Sørensen Yassin 20 of 113

'Master thesis' August 31, 2006
nadir direction.
Gr(ϕ, r) = G+(ϕ)− cs(r) ·G−(ϕ) (13)
cs(r) =G+(ϕr)G−(ϕr)
(14)
where cs is a scale factor determined by the ratio of the sum(G+(ϕr)) and dierencesub-aperture(G−(ϕr)). The idea is that the resulting pattern Gr should have a nullin the direction of clutter, ϕ = ϕr and full gain in nadir direction.
6.3 Field operationThe P-sounders maximum and minimum transmit power can be calculated from
the duty cycle given in section 2.1 and an estimated average peak power of 80W foreach antenna. This number could be larger if some compensation for loss is needed.The maximum and minimum powers for each T/R module of the P-sounder are
Pavg,max = 0.4 · 80 W = 32 W
Pavg,min = 0.1 · 80 W = 8 W
The maximum average power shown here is quite large and this can make thecomponent selection even more dicult. To make a comparison, the traditional T/Rmodule as shown in Fig.6 would put some serious pressure on the switch and isolator.Here and average power of 120W could be reached, which is a very dicult task tohandle. Due to the lower power requirements of the proposed P-sounder architecturein Fig.8, it is possible to construct components that can handle such powers.The P-sounder will be operating in a maximum altitude of 7000m and it is necessaryto simulate a spaceborne geometry. If a pulse length of 20µs pulse is transmitted, itwill travel 6 km on 20 µ. This means that the aircraft should at least be 3 km abovethe ice because the receivers should be turned o during transmission for protection.The longest pulse length of 50 µs pose a problem as this correspond to a length of15 km, meaning a required ight altitude of 7.5 km. The rst and last reection of thetransmitted pulse can be expressed as follows
tfirst = 2Haircraft
c
tlast = 2(
Haircraft
c+
Hice
v
)+ Tp
where Haircraft is height above the ice, c speed of light, Hice thickness of ice, vpropagation speed in ice(c/
√3.15) and Tp is the pulse length. The last reection is
important as this determines when the next pulse can be sent. As can be seen this isdependent on the ice thickness, ight altitude and pulse length. This is illustrated inFig.15 where three dierent levels of ice thickness are plotted for Tp = 20 µ at dierentight altitudes.
The lower graph in Fig.15 shows the maximum PRF that can be used at dierentpulse lengths and receive window lengths. If we want a given PRF, there is a limitwhich is set by the pulse length and receive window time. The received pulse isexpected to have a maximum power level of -5 dBm. This will have a direct inuenceon the choice of LNA chosen for the P-sounder.
Thomas Sørensen Yassin 21 of 113

'Master thesis' August 31, 2006
Figure 15. The last reected signal from a transmitted pulse for dierent ice thick-nesses.
Thomas Sørensen Yassin 22 of 113

'Master thesis' August 31, 2006
7 Power amplierTo penetrate many kilometers of ice, demands some very powerful devices. The
device generating the required power, is the power amplier. The next section willdescribe some dierent classes of power ampliers.
7.1 Power Amplier basicsDescribing power ampliers are usually done in terms of eciency and output
power. It is these two gures of merits that are most interesting. The eciency givenin Eq.(15) is an indication on how well the transistor can convert the DC power intoRF power. Or more generally speaking how much power is consumed, to how muchis delivered to the load.
η =Pout
Pdc(15)
where Pout is power delivered to load and Pdc is power from the power supply.Another expression is also used. This is the power added eciency(PAE) given in
Eq.(16). It resembles Eq.(15) a lot, but takes into account the input power as well.
PAE =Pout − Pin
Pdc(16)
where Pin is the input power. As seen this is only critical if the gain of the device isnot large enough.
From the transistor setup shown in Fig.7.1 it is seen how the voltage and currentwaveforms behaves in a transistor. To obtain the maximum eciency from this and thefollowing classes of ampliers, it is required that you achieve the maximum voltageand current limits, Vdmax and Idmax, of the device. The input bias(Vg0) and driveamplitude(Vg1) are then chosen to satisfy this requirement, together with the thresholdvoltage(Vp). It is by varying these that dierent types of ampliers can be realized.Another requirement is the need to have the transistor in its active region, whichmeans to have 0 ≥ Vds ≥ Vdmax and 0 ≥ Id ≥ Idmax at all times. Furthermore a loadconsisting of a parallel resonant circuit is placed at the output. This behaves as a highQ resonator shorting all harmonics besides the fundamental insuring a pure sinusoidand the resistive load should insure that the maximum voltage swing of Vdmax/2 isachieved.
(a) Prototype amplier. (b) Current waveform of prototype amplier.
Figure 16. Illustration of prototype amplier and current waveform.[5]
Thomas Sørensen Yassin 23 of 113

'Master thesis' August 31, 2006
Class A amplier The rst kind of amplier to be explained is the class A amplier.This has the lowest theoretical eciency. The class A amplier is a linearly drivenamplier due to the fact that it conducts current all the time or has a conduction angleof 2π. This means that to achieve the highest eciency, the fundamental(1.harmonic)voltage swing should be equal to Vdmax/2 and the fundamental current should beequal to Idmax/2. With this ensured, the eciency of this amplier can be calculatedas shown in Eq.(17)
η =Pout
Pdc=
Vdmax
2√
2
Idmax
2√
2VdmaxIdmax
4
=12
(17)
As shown this gives an eciency of 50%, which means that half the battery poweris lost in the transistor. This kind of amplier is used when it is critical that noharmonics is produced. Another issue is heat. If a lot of RF power is required, thenthe same amount is dissipated by the transistor. It requires some appropriate heatsink to protect the device.
Class B amplier It is apparent that class A ampliers are not very ecientalthough highly linear, which could be suited for some applications. The class Bamplier is a compromise between better eciency and less linearity. By adjustingthe bias condition and the drive level, the transistor has a conduction angle of α = π.This means that it only conducts on the positive periods of the drive voltage. Thecurrent waveform will now be pulsed as shown in Fig.17 and Fourier analysis is requiredto decompose the current into DC and harmonic components.
Figure 17. Pulse waveform due to class B operation[6].
Eq.(18)-Eq.(21)[6] express the Fourier DC and harmonic components and the DCand fundamental component respectively, of the class B amplier.
Idc =12π
∫ α/2
−α/2
Imax
1− cos(α/2)[cos θ − cos(α/2)] dθ (18)
In =12π
∫ α/2
−α/2
Imax
1− cos(α/2)[cos θ − cos(α/2)] cosnθdθ (19)
for Eq.(19) n corresponds to the nth harmonic.
Idc =Imax
2π
2 sin(α/2)− α cos(α/2)1− cos(α/2)
(20)
I1 =Imax
2π
α− sinα
1− cos(α/2)(21)
Thomas Sørensen Yassin 24 of 113

'Master thesis' August 31, 2006
For a conduction angle of α = π the DC and fundamental component of the currentbecomes
Idc = Idmax//π
I1 = Idmax/2
The fundamental component remains the same, but the DC component is furtherreduced. Therefore we expect a higher eciency. The eciency of the class B amplierthen becomes
η =Pout
Pdc=
Vdmax
2√
2
Idmax
2√
2Idmax
πVdmax
2
=π
4
This equals an eciency of 78.5%. As already mentioned there are also the generationof harmonics. In class B the only harmonics are the even ones. The most inuencingis the second harmonic which is in-phase with the fundamental. It is mainly dueto this, that it can be explained how the eciency is higher. The second harmoniccan sharpen the peaks of the fundamental component and thereby reduce the DCcurrent[6].
Class C amplier The last amplier that will be explained is the class C amplier.This amplier type is highly non-linear and has a conduction angle of α < π generatingshort pulses. It produces many harmonics and some of these can be quite largecompared to the fundamental. Fig.18 shows a summary of the dierent amplierclasses. The current harmonics are calculated using Eq.(19) with n=1,2..5.
(a) Pulse waveform in class C operation. Noticethe reduction in conduction angle as the ampli-tude decreases.
(b) Summary of nonlinear eect of dierentclasses of ampliers [6].
Figure 18.
The DC component is very low which is a good thing, unfortunately so is the fun-damental component also. The consequence is a reduction in output power, but witha higher eciency. The lower output power has the advantage of easier thermal relief.Theoretically this amplier can have an eciency of 100% when α → 0. Howeverit is apparent that no power can be delivered at this point. One drawback of thisclass of amplier is the requirement of relatively high input RF drive voltage. Thiscan lead to reverse breakdown situations because the relatively large negative input
Thomas Sørensen Yassin 25 of 113

'Master thesis' August 31, 2006
swing is 180 out of phase with the output[6]. In comparison to the two previousampliers, the conduction angle is a function of the drive voltage, which is reduced asthe amplitude is reduced. This is illustrated in Fig.18. The class C amplier is onlyuseful with constant envelope input signals like PM/FM, due to the highly non-linearcharacteristic, therefore AM signals should be avoided.
These amplier congurations are the most basic. There exists also ampliersworking in class D and E. The previous classes used the transistor at a controlledcurrent source. Class D and E use the transistor as a switch. Ideally this mean thatit does not dissipate power, because either it has zero voltage across it or zero currentthrough it. Giving a theoretical 100% eciency.
Thomas Sørensen Yassin 26 of 113

'Master thesis' August 31, 2006
8 ComponentsThis chapter includes the description of all the COTS components that are needed
to implement the front-end module for the P-band ice sounding radar.
8.1 Power modulesBy the requirement of COTS components where ever possible, several modules
need to be investigated. To generate the power specied in section 6 several options areavailable. A power transistor of either MOSFET, Si Bipolar or LDMOS is available.However they have a common disadvantage and this is a very low input and outputimpedance, usually a real and imaginary part less than 1Ω. This make it very dicultto make a broadband matching.Another option is to buy a very high power module(100W or more) and together withsome distribution network feed the antennas. The drawback of this solution, is rstof all the price, which is considerably higher than medium power devices and powertransistors. The solution that will be applied in this thesis, is the use of medium powerdevices(30-60W) located at each antenna. The advantages of this are a better systemeciency and lower costs. The disadvantages are more polarization switches andmore complexity with calibration[11], therefore a couple of medium power modulesare examined.The search for a suitable module is dicult as the frequency of 435MHz is not a typicaltelecommunication frequency, which is now more often located at 470-860MHz. So avery limited number of modules are available.With the given requirements in chapter 2, the choice on power module fell uponthe RA45H4047M from Mitsubishi. The datasheet for this module can be found inAppendix B. To compare it with some of the alternatives which were not used, Table 2is constructed with some of the most interesting parameters. It should be stressedthat the table only consists of power modules and not power transistors since COTScomponents is required whenever possible.
Model VDD(V) IDD(A)@Pout,max Pout(W) Bandwidth(MHz) Eciency(η)(%)45H4047M 12.5 12 63 400-470 35BGY85 24 0.2 - 40-450 -P10 13.8 26 100 426-450 28SM04080-36HS 10 1.5 4 400-800 27NB00415 24 2.7 6.3 1-500 10HMC-C012 12 6.5 10 400-1000 13BBM3C3KK4 28 8 100 100-500 45MRF1570T1 12.5 9 73 400-470 60
Table 2. Comparison of power modules appropriate for the P-sounder system.
The datasheets for all the modules in Table 2 can be found in Appendix 25.One of the most important parameters is the frequency range or bandwidth of
operation. Without the prober range the module cannot be used. The power on theother hand is not critical as several modules can be combined to achieve the speciedpower level although there is a limit because of cots. This already leaves out almostall modules except the MRF1670T1 from FreescaleTM Motorola, BBM3C3KK4 from
Thomas Sørensen Yassin 27 of 113

'Master thesis' August 31, 2006
EmpowerRFSystem, INC. and 45H4047M from Mitsubishi. The remaining three de-vices all have a good bandwidth and high output power. They are all implementedwith MOSFET devices which facilitate high gain, broadband performance and goodlinearity. The MRF1670T1 is made from Lateral MOSFETs and these are relativelyimmune to thermal runaway compared to Bipolar and can also withstand severelymismatched loads[27]. The 45H4047M and MRF1670T1 are both supplied by 12.5V,this means that they require a lot of current to produce the desired output. Theyrequire 9-12A and such amount of current needs some consideration regarding theconnection to the power supply. The module from EmpowerRFSystemINC. is sup-plied from a 28V supply and still consume 8A, but it also delivers 25W more thanthe two other modules. Its eciency together with the 45H4047M module make themboth require a substantial amount of cooling. The MRF1670T1 module is not a 50Ωsystem and therefore need additional matching to achieve the required output power.These considerations make the BBM3C3KK4 module a strong candidate to be usedas power module for the ice sounding system. It has the desired bandwidth, outputpower, eciency and supply conditions. Although not the most suitable, the choiceof power module fell on the 45H4047M module from Mitsubishi. This is used, simplybecause it was the most accessible when time is being considered and a sample of twomodules could be obtained reasonably fast. Some of the power modules in Table 2,have low eciency. In power modules providing even higher power ratings, the poweradded-added eciency is usually in the range of 20-35%. With the losses incorporatedthe eciency is even lower. Therefore research at Ørsted DTU designing a HPA withhigh eciency and bandwidth is ongoing.
8.2 Low noise amplierThe LNA chosen for the P-sounder should, besides the low noise gure, also have a
high compression point with reference to the input. The amplitude variations acrossfrequency should also be minimal. Since a LNA is not capable of delivering muchpower, a very high gain can be a disadvantage, because it means it will reach saturationat a much lower input power. By using a LNA with less gain, the input power canbe larger. This comparison is only valid if it is assumed that the 1-dB compressionpoint at the output is the same. With a maximum input signal of -5 dBm, two LNAswere considered. One with 40 dB and 20 dB gain gain. Their specications are shownin Table.3. They both have the same P1dB of approx. 17 dBm. The maximum inputpower can be calculated by subtracting the gain from P1dB. The two input powersare -3 dBm and -22 dBm respectively for the two LNAs. The maximum input signalof -5 dBm is clearly to high for the LNA from Richardson which would drive it intodeep compression. Where as the LNA from Comm-connect almost perfectly fulll thedynamic range condition. This LNA can utilize the full dynamic range of the DFE.It is important that the full dynamic range of the DFE is utilized.
The NF of both LNAs are very low across the frequency band. The amplitudevariation are also reasonable. Measurements for both the power module and LNA canbe found in chapter 13.
8.3 circulatorThe circulator is used to direct signal ow and to isolate transmitter from receiver.
The frequency range of the P-sounder makes it dicult to nd COTS components.
Thomas Sørensen Yassin 28 of 113

'Master thesis' August 31, 2006
Comm-Connect 4028 Richardson ElectronicsRLAS0205A
Frequency 100-500MHz 200-500MHzGain 20 dB 40 dBAmplitude atness ±1 dB ±0.75 dB
NF typ. 0.5 dB typ. 0.5 dBP1-dB 17 dBm 18 dBmSWR(in/out) 50Ω typ. 1.5:1 typ. 1.18:1
Table 3. LNA specications of the Comm-Connect 4028.
This means that it has to custom made. Valvo Bauelemente is able to do this withinthe specied requirements. Table 4 shows the specications of this circulator togetherwith a COTS circulator that came closest to the specications. Both are able tohandle 100W and an isolation of 20 dB.Company Frequency Iso. IL(max) VSWR(max) Power Temp. range ConnectorsValvo TUDEN-001 385-485MHz 20 dB 0.35 dB 1.25 100W CW, 300W peak 0-60C SMA(female)Renaissance Electronics Corp. 390-480MHz 18 dB 0.5 dB 1.25 500W CW 0-80C N-connectors
Table 4. Specication of circulators.
Thomas Sørensen Yassin 29 of 113

'Master thesis' August 31, 2006
9 Power divider designA power divider can either, as it name suggests, divide or combine a signal. This is
usually a property of the reciprocity of the device. These devices are very importantin RF/microwave circuits as they make it possible to achieve high output powersby combining low power devices. In this project some 300W of power is necessaryto be able to detect the ice all the way down to approximately 4.500m. The P-sounder antenna array consists of four antennas and each should transmit 75W. Asstated in Section 8.1 the selected power module can deliver 48 dBm. This is almostenough, but instead of driving one power module to its limits, two or more can becombined to generate the wanted output power. This is without having it operatingnear saturation.The Wilkinson power divider is a strong candidate for the job. The device is small,easy to analyse and most importantly has a relatively broad bandwidth. Outputcharacteristics are an equal power split with same the phase delay and matching atall ports. Another important parameter is the isolation, which is high between outputports.A fundamental property of a lossless reciprocal three-port network, is that not allports can be simultaneously matched. If it is assumed that all ports can be matched:S11 = S22 = S33=0, then a perfect lossless reciprocal network would have a scatteringmatrix in the following form
[S] =
S11 S12 S13
S21 S22 S23
S31 S32 S33
=
0 S12 S13
S12 0 S23
S13 S23 0
(22)
For the network in Eq.(22) to fulll its lossless status it has to fulll Eq.(23)-Eq.(26)
|S12|2 + |S13|2 = 1 (23)|S12|2 + |S23|2 = 1 (24)|S13|2 + |S23|2 = 1 (25)
S12S∗23 = S13S
∗23 = S12S
∗13 = 0 (26)
This can only be fullled if two of the three transmission coecients are zero, butthis will violate the three rst equations. So this is not possible. Therefore either therequirement of a lossless or reciprocal network has to be sacriced.
The S-parameter matrix for the Wilkinson divider is given in Eq.(27). This isderived using the even-odd mode analysis, which is very appropriate to analyse sym-metric circuits[7].
[S] =
0 e−jπ/2√2
e−jπ/2√2
e−jπ/2√2
0 0e−jπ/2√
20 0
(27)
The s-matrix is reciprocal and matched at all ports, so the network must be lossless.This is indeed the case, but ONLY when considering the transmission between port2 and port 3.
From the S-matrix it can be seen that an input signal at port 1 divides the powerequally between port 2 and 3. The phase is also the same. Inserting a signal at port
Thomas Sørensen Yassin 30 of 113

'Master thesis' August 31, 2006
2 and 3 will add up in phase at port 1. It is important that these two signals arein-phase otherwise power will be dissipated in the resistor.
The standard Wilkinson divider shown in Fig.19, consists of two parallel microstriplines with a length of λ/4 and characteristic impedance of
√(2)Z0 where Z0 is the
characteristic impedance. Furthermore it consists of a resistor between the two arms.This has the purpose of dissipating reected power if port 2 or 3 or both ports aremismatched. The two signals at port 2 and 3, will be in phase if a perfect match isseen at the two ports and therefore no power will be dissipated in the resistor.
Figure 19. Wilkinson Power Divider
The operating frequency of 435MHz makes it inappropriate to utilize distributedelements, due to the relatively large wavelength. The operating wavelength in air isalmost 70 cm. The wavelength will of course be reduced due to the PCB, but it stillrequires some 93mm to realize a λ/4-line if used with standard FR4 print with aεr = 4.6. Therefore some other alternatives will be investigated. Another approachis to use quasi-lumped elements, which means a mixture of lumped and distributedelements.
9.1 Semi-lumped Wilkinson power dividerThe traditional quarter-wave transmission-line, consists of distributed inductors
and capacitors. As one would like to reduce the size, it also has the eect of reducingthe inductance and the capacitance on the line. This changes the phase characteristicand is no longer behaves as a λ/4-segment. To restore the inductance, it is possibleto increase the characteristic impedance of the line and adding capacitors can restorethe capacitance. Such a method is to model the λ/4-segments as shown in Fig.20.
Figure 20. Equivalent section of λ/4-segment.
The method is as follows. The Y-parameters of a traditional λ/4-section and thecircuit in Fig.20, are given in Eq.(28) and Eq.(29) respectively
[Ya] =1
jZ0
[0 11 0
](28)
Thomas Sørensen Yassin 31 of 113

'Master thesis' August 31, 2006
[Yb] =
[cos θ
jZ sin θ + jωC 1jZ sin θ
1jZ sin θ
cos θjZ sin θ + jωC
](29)
where Z0 is the characteristic impedance of the quarter-wave transmission line andZ, θ, ω are the impedance, electrical length and angular frequency of the circuit inFig.20, respectively[28]. By putting Eq.(28) equal to Eq.(29), a set of equations canbe made.
Z = Z0/ sin θ (30)
ωC = (1/Z0) cos θ (31)From Eq.(30) the electrical length can be made shorter by a corresponding increase
in characteristic impedance, Z. Eq.(31) shows an increase in capacitance C, whenthe line length is shortened. Although this circuit exhibits the eect of possibleminiaturizing, it has a great disadvantage. The increase in characteristic impedancecan make it dicult for the manufacturing process due to very thin lines. Also thefrequency can make it dicult to realize the capacitors C, if this has to be implementedwith lumped elements. Take the Wilkinson divider, the impedance of the lines are√
2Z0. Shortening these lines from λ/4 to λ/8 it requires an increase in impedance to2Z0. This lead to another aspect, the loss. The thinner the lines the more loss and alsothe power handling capability decreases. The electrical properties of the semi-lumpedWilkinson divider are almost as good as the distributed circuit. The bandwidth isslightly reduced and the insertion loss slightly increased. These eects are directlyrelated to the losses in the lumped components used in the circuit. Increasing asthe line impedance and capacitive loading is increasing[29]. Another aspect of thisstructure and the purely lumped Wilkinson explained in the next section, is the factthat the divider only operates as a power divider at the design frequency f0. Comparedto the distributed Wilkinson power divider that behaves as a power divider also at oddmultiples of the center frequency, the semi and fully lumped circuits behave as low-passlters at higher frequencies. There exists several dierent methods to implement thisstructure which is well suited for MMICs, some of these are reported to have a reducethe lines from λ/4 down to λ/12, although the characteristic impedance is increasingcorrespondingly. Some of these designs can be seen in [29] and [30]. The technique ofline reduction is not only restricted to capacitive loading. Inductive loading is also anoption. Here the characteristic impedance has to be decreased and loaded by seriesinductors. These are however prone to introduce loss. Especially in MMICs wherethe Q is very low.
Geysel coupler This design was proposed by Ulrich H. Geysel. This divider is acombination between a Wilkinson and a coupler. A layout is shown in Fig.21.
The advantage of this power divider is its ability to have the resistors externallyplaced, compared to the Wilkinson where the resistive part is placed inside the divider.This makes it more suitable to handle more power. Also the bandwidth of this divideris very large. The main disadvantage is that no closed form equations are available todetermine Z1...Z4. Therefore optimisation is necessary. As stated earlier the powerdivider has to be small, as a design using distributed elements would require to muchspace. If a design was made from lumped elements it would require many components
Thomas Sørensen Yassin 32 of 113

'Master thesis' August 31, 2006
Figure 21. Geysel 3-dB power divider. All lines are λ/4.
that would have to be optimised. For this reason the Geysel power divider will notbe considered further.
9.2 Lumped Wilkinson Power DividerTo reach a fully miniaturized power divider one has to use only lumped elements.
To do this we consider the ABCD matrix of a general lossless transmission line witharbitrary θ and Z0.
[A BC D
]
line
=[
cos θ jZ0 sin θjY0 sin θ cos θ
](32)
As mentioned previously in section 9.1, the λ/4 sections of the Wilkinson powerdivider can be realized by a low-pass pi structure. This could also be done with alow-pass tee structure although this would employ more inductors, which introducemore losses. Therefore the pi structure is the favourable one. The two networks areshown in Fig.22.
(a) Low-pass pi network. (b) Low-pass tee network
Figure 22. Low-pass networks.
By writing the ABCD matrix of the low-pass pi network given by Eq.(33) andequating this with Eq.(32), a set of equations can be found on which the L and C ofFig.22(a) can be expressed.
Thomas Sørensen Yassin 33 of 113

'Master thesis' August 31, 2006
[A BC D
]
pi−network
=[
1 0jωC 1
] [1 jωL0 1
] [1 0
jωC 0
]
=[
1− ω2LC jωLjωC(2− ω2LC) 1− ω2LC
](33)
The general expressions for L and C become
L =Z0 sin θ
ω(34)
C =1
ωZ0
√1− cos θ
1 + cos θ(35)
By using θ = π/2 in Eq.(34) and Eq.(35) and inserting ω = 2π · 435 · 106 andZ0 =
√250Ω the following component values are calculated
L C25.8712 nH 5.17423 pF
Table 5. Ideal component values for Wilkinson power divider.
By using the theory just described, several reports have been made to constructlumped Wilkinson dividers. Table 6 summarizes some of these. All the designs aremade in either MMIC, CMOS or with SMD components. This means they are lowpower devices, contrary to what is being pursued in this project. Furthermore theyare extremely compact because of the technology and the operating frequency is alsomuch higher.
Article IL.(dB) Amp. bal. Phase bal. Isol.(dB) Flow Fhigh RLin RLout
[29] 0.55 0.5 dB - 15 10000 10000 30 30[31] 0.16 - - 27 4500 4500 >30 >30[32] 0.6 - - 14.1 8500 8500 24.5 28.1[30] 0.5 0.3 dB 3 30 1500 2100 >17 >15[33] 0.6 - - 17 1000 1000 12 -
Table 6. Comparison of reported Wilkinson dividers.
The software Advanced Design System(ADS) from Agilent is used for all simula-tions. A schematic of the power divider together with the frequency response is shownin Fig.23. The ideal values for the power divider are given by Table 5.
From the gure it is easy to see that the Wilkinson divider fullls the required20% bandwidth. Another interesting feature, shown in the gure, is the fact that thedivider behaves only as a power divider at the given center frequency. The componentsused to realize the divider are inductors from Coilcraft. These are air-wound inductorsas this makes them more suited for high power applications. The closest inductor to25.9 nH is 27 nH. The capacitors used are variable capacitors from Tronser, which canbe adjusted from 0.7-7 pF. These are used as a starting point, since tuning is almostalways needed when mounted on PCB. A re-simulation is needed with the models ofthe inductors in place. The capacitors did not have any model, so these were omittedfrom the re-simulation and the ideal was still used.
Thomas Sørensen Yassin 34 of 113

'Master thesis' August 31, 2006
(a) Lumped Wilkinson divider with ideal ele-ments.
(b) Frequency response of Wilkinson divider inFig.23(a).
Figure 23. Ideal lumped Wilkinson divider.
Figure 24. Simulation of Wilkinson divider with inductor models.
Thomas Sørensen Yassin 35 of 113

'Master thesis' August 31, 2006
Figure 25. Measured response of Wilkinson divider with variable capacitors.
From Fig.24 it is seen how the frequency response is shifted a bit down in frequency.This is due to the inductors, as the inductor that came closest to the calculated valuehad to be used. By tuning with the capacitors and changing the inductors from 27 nHto 18 nH, it was possible to achieve the frequency response shown in Fig.25.
The optimal solution is not to use these variable capacitors. They are quite bulkyand they introduce a lot of additional parasitic inductance compared to SMD com-ponents. Another reason is the fact that more than one have to be build and it isimportant that they are as identical as possible and that each output is as identicalas possible. It is therefore necessary to exchange the variable capacitors with SMDsas this will make the divider more reliable. A new power divider was build only withSMD capacitors from ATC. The 100Ω resistor is a power resistor capable of dissi-pating 25W in a T220 housing. When the circuit was rst measured with calculatedvalues or as close as possible to the calculated values, it was seen that the responsewas shifted down in frequency, so tuning was required. By tuning the device it waspossible to obtain a satisfying result. The component values before and after tuningare given in Table 7. Fig.26 show a schematic of the Wilkinson divider with SMDcomponents and the circuit tracks included. The simulated response of the circuit inFig.26 is shown in Fig.27. This predicts a perfect -3 dB response at 475MHz and witha variation of 0.2 dB across the bandwidth. The balance between the outputs is alsoexpected to be very good. The measured response of the Wilkinson divider is shownin Fig.28. It can be seen that there is good agreement between the simulated andmeasured responses. Although there are more losses in the real circuit. The layout ofthe Wilkinson divider is shown in Appendix E. All lines are 50Ω and the substrateis a standard FR4 print with ε = 4.6. This gives a line width of 2.82mm. Whenevera 50Ω line is mentioned through out the report it refers to this line width.
L COptimised values in ADS 27 nH 1.5//3.3 pFAfter tuning 23 nH 1.5//3.3 pF in one arm and 3.9 pF in the other arm
Table 7. Component values for Wilkinson power divider with SMD components.
From Fig.28 it is seen that the amplitude dierence between the outputs are verysmall, approximately 0.1 dB. This is a very important feature. If it is used in low
Thomas Sørensen Yassin 36 of 113

'Master thesis' August 31, 2006
MLIN
TL14
L=19.75 mmW=2.823400 mm
Subst="MSub1"
MLIN
TL10
L=2.5 mm
W=2.823400 mm
Subst="MSub1"Term
Term1
Z=50 Ohm
Num=1
MLIN
TL17
L=1.27 mm
W=4.57 mm
Subst="MSub1"
MLIN
TL1
L=10 mm
W=2.823400 mm
Subst="MSub1"
C
C6
C=3.3 pF
C
C3C=3.3 pF
C
C2C=1.5 pF
C
C1
C=3.9 pF
L
L4
R=
L=23 nH
L
L3
R=
L=23 nH
C
C5
C=1.5 pF
C
C4
C=3.9 pF
MLIN
TL22
L=1.27 mmW=4.57 mm
Subst="MSub1"
MTAPER
Taper4
L=4.5 mmW2=4.57 mm
W1=2.823400 mm
Subst="MSub1"
MLIN
TL19
L=1.27 mmW=4.57 mm
Subst="MSub1"
MTAPER
Taper3
L=2.5 mmW2=2.823400 mm
W1=4.57 mm
Subst="MSub1"
MLIN
TL20
L=3.0358 mmW=2.823400 mm
Subst="MSub1"
MLIN
TL18
L=1.27 mm
W=4.57 mm
Subst="MSub1"
MTAPER
Taper2
L=2.5 mm
W2=2.823400 mm
W1=4.57 mm
Subst="MSub1"
MLIN
TL6
L=3.0358 mm
W=2.823400 mm
Subst="MSub1"
MSOBND_MDSBend17
W=2.823400 mm
Subst="MSub1"
MLIN
TL24
L=6.6194 mm
W=2.823400 mm
Subst="MSub1"
MSOBND_MDS
Bend18
W=2.823400 mm
Subst="MSub1"
MSOBND_MDSBend19
W=2.823400 mm
Subst="MSub1"
MSOBND_MDS
Bend8
W=2.823400 mm
Subst="MSub1"
MSOBND_MDS
Bend6
W=2.823400 mm
Subst="MSub1"
MSOBND_MDS
Bend9
W=2.823400 mm
Subst="MSub1"MSOBND_MDS
Bend4
W=2.823400 mm
Subst="MSub1"
MLIN
TL21
L=2.0139 mm
W=2.823400 mm
Subst="MSub1"
MTAPER
Taper1
L=4.5 mm
W2=4.57 mm
W1=2.823400 mm
Subst="MSub1"
MSOBND_MDSBend14
W=2.823400 mm
Subst="MSub1"
MSOBND_MDS
Bend15
W=2.823400 mm
Subst="MSub1"
MLIN
TL16
L=5 mm
W=2.823400 mm
Subst="MSub1"
L
L1
R=
L=1.0 nH
R
R1
R=100 Ohm
L
L2
R=
L=1.0 nH
MLIN
TL23
L=19.75 mmW=2.823400 mm
Subst="MSub1"
Term
Term3
Z=50 Ohm
Num=3
MLIN
TL25
L=2.5 mm
W=2.823400 mm
Subst="MSub1"
MSOBND_MDS
Bend16
W=2.823400 mm
Subst="MSub1"
TermTerm2
Z=50 Ohm
Num=2
MLIN
TL8
L=2.0139 mm
W=2.823400 mm
Subst="MSub1"
MLINTL13
L=6.6194 mm
W=2.823400 mm
Subst="MSub1"
MLIN
TL2
L=5 mm
W=2.823400 mm
Subst="MSub1"
MTEE_ADS
Tee1
W3=2.823400 mm
W2=2.823400 mm
W1=2.823400 mm
Subst="MSub1"
Figure 26. Schematic of Wilkinson divider with SMD components corresponding tothe values in Table.7.
(a) Transmission between input and output. (b) Reection coecients.
Figure 27. Simulation result of circuit in Fig.26.
Thomas Sørensen Yassin 37 of 113

'Master thesis' August 31, 2006
(a) Output of Wilkinson divider. (b) Reection coecients of Wilkinson divider.
(c) Amplitude dierence between the two out-puts. (d) Phase dierence between the two outputs.
Figure 28. Measured frequency response of Wilkinson power divider with SMDcomponents.
Thomas Sørensen Yassin 38 of 113

'Master thesis' August 31, 2006
power applications, almost no power will be dissipated in the isolation load. As thepower increases, even small amounts of amplitude dierence will lead to a fair amountof dissipated power by the isolation load. The phase dierence is also very small andthis is expected as the two outputs are very close to each other and the two pathsare the same regarding components. The Wilkinson divider will not have a 90 phaseshift for each arm as the ideal components are changed. But this is not importantas long as the phase dierence is as small as possible. If this is not the case therewill be dissipated power in the isolation resistor, which is not intended. The phasedierence is measured to be less than 1. It should be noted that this divider issymmetric in each arm, but the pi-structures are not symmetric. This asymmetriclayout was found by experiments to work best. Also S21 and S31 are not -3 dB butrather -3.3 dB. Although there is loss it is important that this is constant across thebandwidth. Because the P-sounder system needs this to operate satisfactorily. Thetransmitted pulses should be very constant over frequency. This is why it is importantthat the amplitude response is at and also that the two outputs track each other.The insertion loss of 0.3 dB is coming from conductor losses internally in the powerdivider mainly from the inductors. These losses can become a problem if the nominalpower of 80W is used, a 0.3 dB insertion loss correspond to dissipated power of 5.5W.This is a lot of power considering how small the component is. The full test of thecomplete front-end will have to take this into consideration either by keeping it coolor by testing it at a lower power level. It should be mentioned that a test applying50W to the input of the divider, giving 25W too each output arm, gave a temperaturearound 82C on each inductor. The return loss on all ports is less than 15 dB acrossthe operational bandwidth. The return loss of the input approach 12 dB at 500MHz.This could be a consequence of the power resistor, which is physical not very small.The isolation is below -15 dB up until 460MHz, but increases hereafter. It is alsosuspected that this is a consequence of the power resistor. It is believed that furtherimprovements can be made with more compact design and also another power resistor.By doing a comparison between what has been achieved here and with reported designsummarised in Table 6, it is obvious that the results achieved here are very good. Theinsertion loss and amplitude balance is comparable or better than what has beenreported. The return loss is however not as high, but it is still large enough to besatisfying. The isolation is also in the same area as the results shown in Table 6. Itshould also be noted that several of the designs are very narrow-banded, compared tothe design done presented in this thesis. The experimental results done here are alsocomparable to commercial available power dividers, also the developed power divideris very compact.
FR4 Conductor losses There are two contribution to the losses in microstrips.One comes from the dielectric losses in the substrate and the other is coming fromthe losses in the conductor. These can be expressed as follows
αd =k0εr(εe − 1)tanδ
2√
εe(εr − 1)Np/m (36)
αc =Rs
Z0WNp/m (37)
where Rs =√
ωµ0/2σ is the surface resistivity of the conductor and εe is theeective dielectric constant. Usually the conductor loss are the dominating factor and
Thomas Sørensen Yassin 39 of 113

'Master thesis' August 31, 2006
the dielectric loss can be disregarded. Compared to high frequency substrates, thedielectric constant of FR4 is not constant over frequency and the loss tangent is alsomuch larger in the area of ' 0.02. The losses for a 50Ω transmission at 435MHz withεr = 4.6 is calculated below
αc = 0.34 dB/m
αd = 1.33 dB/m
It is obvious that the dielectric losses are dominating compared to conductor lossesand this could explain some of the loss mechanisms encountered during measurements.
9.3 SummaryDierent design methods for the Wilkinson divider has been presented. This has
lead to the design of a compact high power wilkinson divider. The divider has shownto have good frequency characteristics. It has also been tested with high power andbeen able to handle this. The 20% bandwidth of the power divider seemed to fullled,but on the frequency edges it could be improved.
Thomas Sørensen Yassin 40 of 113

'Master thesis' August 31, 2006
10 Rat-race hybrid/couplerHybrids and couplers are very important components in modern applications of
microwaves in radar and communication systems. The circuits are often used inbalanced ampliers, balanced mixers and other applications. In this project it isused to generate a 180 phase shift between each antenna port. The ring hybridor the 180 hybrid(Rat-race coupler) is the circuit that can perform this. The ringhybrid is very similar to the Wilkinson power divider, although the ring hybrid hasmore features. Just as the Wilkinson divider is capable of summing and splitting twosignals with the same frequency, so is the ring hybrid. As explained in Section 9 it isnot possible to have a lossless, reciprocal and matched three-port network. But thereis way around this. It is possible to add an additional port with the only purposeof fullling the mentioned requirements. It can be shown by writing the S-matrixfor a reciprocal and matched four port and then write up the 10 equations due toenergy conservation for the lossless network[7]. To satisfy these requirements it isnecessary to have some of the transmission coecients equal zero, which would leadto a directional coupler. Furthermore there has to be a phase relationship betweenthe ports. There are two cases: The Antisymmetrical and Symmetrical Coupler. TheS-matrix for the Antisymmetrical coupler is shown in Eq.(38)
[S] =
S11 S12 S13 S14
S21 S22 S23 S24
S31 S32 S33 S34
S41 S42 S43 S44
=
−j√2
0 α β 0−α 0 0 −ββ 0 0 α0 −β α 0
(38)
Here it is seen how the output can dier 180 between outputs. The dierencebetween Symmetrical and Antisymmetrical is that the Symmetrical coupler have thesame phase relationship between its amplitude β. The amplitudes α and β mustsatisfy
α2 + β2 = 1 (39)The rat-race hybrid is a four port device where one port is isolated. A schemat-
ic/layout of such a hybrid is shown in Fig.29.
Figure 29. Layout of distributed ring hybrid[7].
It consists of a characteristic impedance of√
2Z0 and three arms of each λ/4 andone with a length of (3/4)λ. The corresponding scattering matrix of the ring hybrid
Thomas Sørensen Yassin 41 of 113

'Master thesis' August 31, 2006
can also be derived by employing an even-odd mode analysis just like the Wilkinsondivider. The matrix is given in Eq.40
[S] =
S11 S12 S13 S14
S21 S22 S23 S24
S31 S32 S33 S34
S41 S42 S43 S44
=
−j√2
0 1 1 01 0 0 −11 0 0 10 −1 1 0
(40)
From the scattering matrix it is seen how all ports are matched and that someports exhibit in-phase and 180 out of phase relationship, dependent on which portis excited. By referring to Fig.29, applying a signal at port 1 the Rat-race couplercan split it with even amplitude to port 2 and port 3 and port 4 will be isolated. If asignal is applied at port 4 it will split the signal evenly with a 180 phase dierencebetween port 2 and port 3, with port 1 isolated. By applying signals at port 2 andport 3 the sum signal is emerging at port 1 and port 4 will have the dierence signal.As will be shown, this coupler is very broad-banded, in the range of <20%.
10.1 Lumped element Rat-race hybridAs with theWilkinson divider the frequency is rather low to justify for a distributed
component. Another reason is the fact that the Rat-race coupler is even electricallylarger than the Wilkinson divider. Therefore the lumped equivalents circuit fromSection 9.2 is used again. By applying Eq.(41) and Eq.(42) with θ = π/2
L =Z0 sin θ
ω(41)
C =1
ωZ0
√1− cos θ
1 + cos θ(42)
the 90-sections can be implemented with the low-pass pi network, just as in theWilkinson divider. However the (3/4)λ = 270 section cannot, as this would lead to anegative inductance element due to the sine function in Eq.(41). The cosine functionin Eq.(42) is not a problem, since it is an even function. One network that could beused is a high-pass tee network as shown in Fig.30
Figure 30. High-pass tee network
The ABCD matrix for this network is given by Eq.(43)
[A BC D
]
tee−network
=[
1 −jωC
0 1
] [1 0−jωL 1
] [1 −j
ωC0 1
]
=[
1− 1ω2LC
−jωC
(2− 1
ω2LC
)−jωL 1− 1
ω2LC
](43)
Thomas Sørensen Yassin 42 of 113

'Master thesis' August 31, 2006
By equating Eq.(43) and Eq.(32) the following equations for the capacitor andinductor for the high-pass tee network can be expressed. Here either θ = −90 or270 can be used.
L =−Z0
ω sin θ(44)
C =1
ωZ0
√1 + cos θ
1− cos θ(45)
There have been several reports on the development on lumped Rat-race couplers.Where the majority have been on low power and highly integrated structures such asMMMICs. A few of these have been summarized in Table 8.
Article IL.(dB) Amp. bal. Phase bal. Isol.(dB) Flow Fhigh RLin RLout
[28] 0.7 0.2 dB - - 25 25 18 -[34] 0.7 0.3 dB - - 7950 7950 25 25[35] 2.2 - ±4 <-15 11000 13000 >15 -
Table 8. Comparison of reported 180 dividers.
A schematic of the lumped element Rat-race coupler is shown in Fig.31. Thisconguration can have several features if the layout is done properly. Each sectioncould be used as 1)a impedance transformer 2)a low-pass lter 3)a phase shifter. Table9 shows the component values. Where both the low-pass and high-pass network havethe same values.
L CElement values 25.8712 nH 5.17423 pF
Table 9. Component values for the ideal Rat-race coupler with θ = π/2.
Figure 31. Schematic of Rat-race coupler with ideal components. Port 1 is theinput port and port 4 is the isolated port.
Thomas Sørensen Yassin 43 of 113

'Master thesis' August 31, 2006
The simulation of the circuit in Fig.31 is shown in Fig.32. It shows an almostperfect coupling and matching, but there is a slight amplitude mismatch at the twoborder frequencies. The 180 degree phase dierence between port 2 and port 3 hasless than 1 phase error as can be seen in Fig.32
Figure 32. Simulation of Rat-race coupler with ideal components.
Figure 33. Phase dierence between port 2 and port 3 in Fig.32
Although a distributed Rat-race coupler is not used in this project, a design wasdone just for comparison. The simulation was done using momentum in ADS. Thislayout together with the simulated and measured frequency response can be foundin Appendix D. From Fig.105, it can be seen that the distributed coupler is prettybroad-banded as expected. The plot for amplitude and phase dierence is shown inFig.107 and Fig.108 respectively. The amplitude dierence has a maximum of 0.5 dBand the phase dierence has a maximum of 8. The phase dierence is expected dueto the distributed nature of the coupler. For this reason the lumped coupler is still astrong candidate for the job.
Thomas Sørensen Yassin 44 of 113

'Master thesis' August 31, 2006
10.1.1 Improving amplitude and phase bandwidthIf an even broader bandwidth is required, it is possible to cascade two 45 or
three 30 sections of lumped networks to make up the 90. If an innite amount ofstages are used, it will approximate an ideal transmission line. However two sectionsare usually enough to make a huge dierence. Anything above this is not worth theeort as there is an increases in components too. The improvements are easily seen,comparing Fig.32 and Fig.35. Especially the return loss is improved over a largerfrequency band and the insertion gain is almost constant over the entire graph. Thecomponent values are calculated by using Eq.(41) and Eq.(42) for the lowpass-networkand Eq.(44) and Eq.(45) for the high-pass network.
Electrical length θ = π/2 θ = −π/2L 18.294 nH 36.587 nHC 2.1432 pF 12.492 pF
Table 10. Component values for 2-section Rat-race coupler.
Although two sections for each arm is being used it is not a doubling of componentsas parallel capacitors can be added together. The schematic of the new coupler isillustrated in Fig.34.
Figure 34. Rat-race coupler with each arm made from two sections.
The component values for a two section are given in Table.11. Here θ = π/4 hasbeen used for the low-pass pi network and θ = −π/4 for the high-pass tee network.
C1 C2 C3 C4 L1 L2
Element values 4.2864 pF (C1/2) pF 12.492 pF (C3/2) pF 18.294 nH 36.587 nH
Table 11. Component values for the ideal Rat-race coupler with two sections.
Thomas Sørensen Yassin 45 of 113

'Master thesis' August 31, 2006
The simulation result of the new two section design and its phase dierence be-tween port 2 and port 3 can be seen in Fig.35 and Fig.36 respectively.
Figure 35. Simulation of Rat-race coupler with ideal components and two sections.
Figure 36. Phase dierence between port 2 and port 3 in Fig.34
The amplitude response is becoming a little more broadband whereas the phasedierence is almost the same compared to the design using one section. The impedancebandwidth is increased a lot. These improvements are making this design suitable forimplementation.
Thomas Sørensen Yassin 46 of 113

'Master thesis' August 31, 2006
10.2 Practical implementationThe circuit in Fig.34 is implemented with Mini and Low-prole Mini Springr
from Coilcraft. These can handle a maximum current of 4A peak. The capacitorsare from the 100B series from ATC(American Technical Ceramics). These are alsowell suited for high power applications and can handle 500V DC. Most of the valuescan be found in these series, but a few of the capacitors have to consist of a parallelcombinations. This also has the eect of using smaller capacitor values, which hasa higher self resonance. By employing the component models the circuit was re-simulated. The result was not satisfactory as the amplitude dierence was prettylarge with a maximum of 1 dB. The phase was not exactly 180 but constant withfrequency. The return loss was satisfying although not centered at 435MHz. Bymodifying the circuit further by introducing an 8 nH inductor in the −90 branch theamplitude response could be restored but by scarifying the phase. This is shown inFig.37.
(a) Amplitude response. (b) Phase dierence between port 2 and port 3.
(c) Return loss of all ports.
Figure 37. Simulated response for the rat race coupler with non-ideal components.
As shown the amplitude response is very good with only around 0.2 dB dierence.The phase however, is as expected, not very good, but could be restored by extendingthe delay in one of the outputs. The phase variation across the bandwidth is less than2 which is very good. The return loss is better than 15 dB in the specied bandwidthand below 20 dB up until 470MHz.The layout of the coupler was done on standard FR4 and this is shown in Fig.112.
Thomas Sørensen Yassin 47 of 113

'Master thesis' August 31, 2006
The isolated port was terminated with 50Ω comprised of two 100Ω SMD resistors.All the component values are given in Table 12 according to Fig.34
C1 C2 C3 C4 L1 L2
Element values (1//3.3) pF 2.2 pF 12 pF (4.7//1.5) pF 18.5 nH 35.5 nH
Table 12. SMD component values for the Rat-race coupler.
The measurement showed that some optimisation was necessary. This meant thatsome component had to be adjusted to get a satisfying result. Besides adding the8 nH inductor, the following adjustments were made: The two shunt inductors L14and L15 in Fig.34 were changed from 35.5 nH to 23 nH. It was believed that the groundhad a huge inuence on the frequency response and that it added a lot of parasiticinductance, why this lead to a relatively large change in inductor value. The resonanceof these large inductors are also lower, which mean that the inductors specied valuebegins to deviate from the nominal value at higher frequencies. The Q factor is alsoinverse proportional with the inductor value and the peak decreases as the inductanceincrease. This is shown in Fig.38.
(a) (b)
Figure 38. Showing the inductance and quality factor of the Mini SpringTM Coil-craft inductors.
The capacitor C25 in Fig.34 was changed to a parallel combination of 2.2 pF and2.7 pF. The measured result is shown in Fig.39.
The measured results show a good agreement between simulation and measure-ments. The insertion loss is slightly higher but always below 0.5 dB across the wholebandwidth. The amplitude balance is quite good and varies less than 0.3 dB over thebandwidth. The amplitude dierence between the two outputs, stays below 0.3 dBwhich also is very good. It was expected in the simulations that the phase would notbe a perfect 180 dierence and this is conrmed by the measurement. This shows aphase dierence of 174 at the center frequency, but with a variation of less than 4
over the bandwidth. This is an important feature, as the phase dierence is the mostimportant feature. The return loss is below 13 dB across the whole frequency band,but do not follow the simulation trends. It is however below 15 dB in the speciedbandwidth, which is good. The reason for these discrepancies, are mainly due to ad-justments to decrease the insertion loss. Also none of the circuit traces together with
Thomas Sørensen Yassin 48 of 113

'Master thesis' August 31, 2006
(a) Amplitude response. (b) Phase dierence between port 2 and port 3.
(c) Return loss of all ports.
Figure 39. Measured response for the rat race coupler with non-ideal components.
the ground was included in the simulation. For a rst design this is a good result,which ts more or less with the simulated. It is apparent that the phase should berestored. As mentioned the symmetry of the divider was broken, to restore the ampli-tude response and if this could be done without doing this it would restore the phase.The layout in Fig.112 shows very clearly that the signal paths are not the same forall the ports. This could be an explanation on the problem of the uneven problems.This design also showed that vias were highly important. These were placed as closeto the component ground as possible and then several were made to lower both theresistance and the inductance introduced by the via. A second design with the samecomponent values but more compact and with a larger ground were also made. Sev-eral of the inductors in the rst design were placed in-line, which could course theseto coupled with each other. Together with the minimizing, all of the inductors wererotated to be orthogonal to each other, to help minimize the coupling. This howeverdid not show any improvement, but conrmed that the largest improvement camefrom the vias, which were necessary if the response should come close to the expected.Compared to Table 8 the results shown here are comparable. Commercially availablecomponents also show some of the same features, but the hybrid shown here is muchmore compact.
Thomas Sørensen Yassin 49 of 113

'Master thesis' August 31, 2006
10.2.1 Alternative design using Wilkinson dividerThe functionality of the hybrid coupler could have been implemented by a dierent
design. If the only wanted property was a -3 dB power split and 180 phase shiftbetween the two output ports, a Wilkinson divider could have been used with addedphase shift. By using the already familiar lumped networks, a +90 and −90 phaseshift can be added to each output port respectively. The negative phase shift of −90
can be implemented with the low pass pi-network and the +90 with a high passtee network. The dierence between this and a distributed, is also that with lumpedcomponents both positive and negative phase shifts can be implemented. It was hardto nd much any reports regarding this design method, but two cases were found andthe results are given in Table 13
Article IL. Amp. bal. Phase bal. Isol.(dB) Flow Fhigh RLin RLout
[36] 0.47/0.37 dB 0.1 ±10 <-10 1170 2330 >10 -[37] <1.1 dB <0.35 ±10 >18 4625 6375 >12 >12
Table 13. Comparison of reported 180 Wilkinson dividers.
By modifying the already designed Wilkinson divider, an additional lowpass-pinetwork and a high-pass tee network were added. The components for the addedlow-pass network were calculated using Eq.(34) and Eq.(35). The high-pass networkusing Eq.(44) and Eq.(45). Both with ω = 2π ·435 ·106 and Z0 = 50Ω, the componentvalues are given in Table 14
L C18.2937 nH 7.31747 pF
Table 14. Component values for the ±90 sections.
both sections have the same values because the phase is +/− 90. The layout/de-sign is based upon the same as the Wilkinson divider. The components needed tobe optimised to take the layout and the newly added sections into account. It hasto be remembered that the Wilkinson divider in section 9.2 was designed to have alow amplitude unbalance, whereas the phase was unimportant as long as there was nounbalance. Now the phase should be 180 across the whole bandwidth and with littlephase unbalance. A schematic of the new 180 divider is shown in Fig.40. The idealcomponent values needed to be changed a bit, when the layout and real componentswere taken into account in the simulation. Therefore the circuit was optimised be-fore being implemented. The simulated optimised component values and values aftermeasurement are given in Table 15.
C1=C3 C2=C4 L1=L2 C5=C6 C7=C8 L3=L4Optimised values in ADS 3.9 pF 1.5//3.3 pF 23 nH 2.2//4.7 pF 2.2//5.6 pF 17.5 nHAfter tuning 3.3 pF 1.5 pF 27 nH 1.0//4.7 pF 1.0//5.6 pF 16 nH
Table 15. Component values for the 180 power divider.
The simulation result with the optimized values is shown in Fig.41.This network is a compromise between amplitude and phase unbalance. Here the
phase is important and the phase dierence is around 4, which is good. However theamplitude balance is not good with an unbalance of 0.23 dB, but was found to be areasonable compromise between phase and amplitude. During the tuning in ADS it
Thomas Sørensen Yassin 50 of 113

'Master thesis' August 31, 2006
Figure 40. Schematic showing the components of the 180 divider.
was found that the newly added sections should stay untouched, else the amplitudeand phase responses became very bad. This was an eect of the two sections were notidentical i.e. one was low-pass and the other high-pass. The components in the originaldivider had a large inuence on both amplitude and phase changes. The results forthe simulation show an insertion loss of 0.3 dB, which is higher than the Wilkinsondivider, but this is coursed by the added sections. The return loss is predicted to belower than 15 dB across the whole bandwidth. The at phase response is a compromisebetween amplitude and phase over all frequencies. When the circuit was build andmeasured for the rst time it seemed as if the response was shifted down a little infrequency, but it only took minor adjustments as Table 15 also shows, to improve this.The measured results are shown in Fig.42.
1 The measurement shows a very nice response, although there is the inevitableloss. The amplitude balance is almost equal except in the upper frequency limit wherethese are a slight amplitude unbalance of 0.16 dB. The insertion loss in both arms isbetter than 0.5 dB. This is comparable to the results of the rat-race coupler also shownin this chapter. The return loss is better than 15 dB across the whole bandwidth, onlyport 1 is slightly worse than expected. This could be due to the nite ground for theconnection of the capacitors. The phase dierence has a maximum of 2, which isvery good, but is otherwise a perfect 180 at the center frequency. Comparing thisto the previous design in this chapter, shows that this is a huge improvement. Notonly are the results better, but the circuit is also easier to implement as there is fewercomponents. The layout of the this circuit is shown in Fig.114. Compared to Table13, these results are also shown to be the same or better. It is believed that this canbe optimised further be even more careful layout, which is not based on a previousdesign.
10.3 SummaryA 180 hybrid have been investigated in this chapter. It has been designed and
veried with measurements and able to handle high power. With an equal powersplit and phase dierence of 180, it was found that an improvement of the standardWilkinson divider could obtain a better characteristics regarding amplitude balanceand phase atness. This has to be compared to the traditional 180 hybrid whichhas more functions though. It is believed that the couplers can be further improved
1The port numbering could not follow the schematic as only a 2-port VNA was available. So thefollowing applies: S31=S43 and S33=S44 in Fig.42.
Thomas Sørensen Yassin 51 of 113

'Master thesis' August 31, 2006
(a) Frequency response of divider. (b) Reection coecients
(c) Amplitude dierence between the two out-puts. (d) Phase dierence between the two outputs.
Figure 41. Simulated frequency response of 180 Wilkinson power divider.
and more compact by careful layout. The 180 Wilkinson did full the bandwidth re-quirement, but the response is slightly tilted. If this could be restored, the bandwidthwould fullled perfectly.
Thomas Sørensen Yassin 52 of 113

'Master thesis' August 31, 2006
(a) Frequency response of divider. (b) Reection coecients
(c) Amplitude dierence between the two out-puts. (d) Phase dierence between the two outputs.
Figure 42. Measured frequency response of 180 Wilkinson power divider.
Thomas Sørensen Yassin 53 of 113

'Master thesis' August 31, 2006
11 SwitchLike the isolator or circulator, the switch is an indispensable control unit in com-
munication systems. These must be able to direct signals or isolate components andat the same time have as little impact on the signals in the system as possible. Theschematic symbols for dierent switch topologies are shown in Fig.43.
Figure 43. Dierent switch topologies
The two most used congurations are the SPST and SPDT switches. The archi-tecture overview in Fig.8 shows three switches. The switches located in the receivepath are low power switches and these can be COTS components. This is because theonly handle very low receive power. Another important characteristic of the switchis the speed. The two receive switches in front of the LNAs have to rst isolate theLNA under transmission and then switch back to be ready for reception. This placesa somewhat stringent requirement on switch selection regarding speed. In the trans-mit patch the switch has to sustain a fair amount of power and also have a fairlyhigh switching speed. During transmission a total of 300 W is being transmitted,which means that each patch should transmit some 75W. Depending on pulse widthand duty-cycle, the switch should be able to handle a max average power of 7.5W.As already mentioned in Section 3 a switch has two very important terms, isolationand insertion loss. Besides these there is also the switching speed to consider. Nowthat some of the requirements have been presented a short presentation of possiblecomponents for switch realizations will be the subject of the next section.
Commercially available switches Several switches are necessary in the completeP-sounder system. Some has to be very fast and not handle much power. While otherneed to handle the transmitted power and also be relatively fast. Some commerciallyavailable switches are shown in Table 16Company Type IL ton to Isol Pin1dB OIP3 IIP3 Flow Fmax RLin RLout
(dB) (us) (us) (dB) (dBm) (dBm) (dBm) (MHz) (MHz) (dB) (dB)Hittite HMC546MS8G 0.4 0.12 0.036 30 39 60 200 2200 20 20DBP Microwave 2A/2AE 0.2 15000 15000 80 64 0 4000 21 21JFW Industries 50S-1268 0.5 40 40 55 50 100 500 19 19JFW Industries 50S-1256 0.55 60 60 50 51 30 512 18 18Chelton SI-12-03035 0.5 2 2 60 44 100 500 21 21Chelton SI-12-03035 0.7 10 10 60 60 100 500 21 21
Table 16. Sample of commercial available switches.
There exists several high-speed low power switches which are good candidates.They all have good return loss and high isolation. A high power switch capable of fastswitching times is very dicult to nd and is usually a contradictory requirement.For this reason a switch will be designed with a low insertion loss and highest possibleswitching time.
Thomas Sørensen Yassin 54 of 113

'Master thesis' August 31, 2006
11.1 Switch devicesThere are several devices that can be used to implement a switch. In the following
only the SPDT switch will be considered as this is the device used for this project. Ashort listing of devices used for switches are given below:
• Mechanical switches
Slow switching speed (milliseconds) Very high power handling High isolation
• PIN diodes/Schottky
Fast switching High/moderate power handling Moderate isolation
• Transistor
Very fast switching High power handling Moderate/high isolation
Mechanical switch The mechanical switch is dierent from the diode and tran-sistor switches as this makes a physical connection between the input and one of theoutput and the isolated arm is really "isolated". This is what makes it possible toachieve very high isolation and also a very low insertion loss at the same time. Theyare capable of switching kilo watts of power. Since this switch is physically mov-ing an arm from input to output, it takes some time and this is why the switchingspeed is very low. The mechanical switch is too slow and therefore it cannot be usedas a switching element in this project, although it's other features are highly desirable.
Transistor switch The transistor is an element that can be turned on and oand therefore it is ideal to be used as a switching element. For some time FETtransistors have been used for high speed switching, but have only been able to handlemilliwatts or up to a couple of watts of power. These switch types are very muchsuited as a receive switch in the P-sounder due to the switching times that are in thenanosecond range. Recently there has been lot of developing in making high powerFETs that are capable of handling very high powers. These include AlGaM/GaNHEMT. These devices have been reported to be capable of handling, amplifying anddelivering signicantly higher power signals than currently used MMIC technologies.This is possible due to a high voltage breakdown eld of 500V, high electron sheetcharge density and the availability of a semi-insulating bulk substrate material suchas SiC (silicon carbide), with high thermal conductivity. There has been reportes ofswitches capable of handling up to 40W of power [38] Unfortunately the availabilityof SiC is low and this makes it dicult to obtain these transistors [39]. Although itwould have been very interesting to use such a switching element, it was not possibleto obtain these devices and therefore it will not be considered further.
Thomas Sørensen Yassin 55 of 113

'Master thesis' August 31, 2006
Diode switch The PIN diode is very often used as a switching element. It is capableof much faster switching times than the mechanical switches, typically in micro tonanosecond range, depending on the type of diode. Schottky diodes are typicallyfaster than PIN diodes, although not with the same power handling properties. Thepower handling is also substantial despite the relatively small size of the PIN diode.These can come in SMD packages. The insertion loss can be very low with PIN diodesdepending on how the diode is operated, although the isolation is lower because ofthe physical connection of the diode with the rest of the circuit. Although the newtransistor mentioned above would have been more appropriate, regarding speed andpower handling. It is the PIN diode that will be pursued to implement a high powerswitch for the P-sounder. The rest of this chapter will be devoted the characterizationand design of a high power diode switch.
11.2 PIN diode basicsThe PIN diode is widely used within RF applications. The schematic symbol for
a PIN diode and its physical construction is shown in Fig.44
Figure 44. Electrical symbol and chip outline
The PIN diode is a silicon semiconductor where a high resistivity I-region(intrinsic)is between a P+ and N+ region. A lot of the PIN diodes electrical properties aredependent on the chip geometry and the semiconductor material in the I-region [9].When the diode is forward biased, holes and electrons are injected into the I region.The charge does not recombine instantaneously, but remain in the I-region for a periodof time. This is denoted the carrier lifetime (τ). The otherwise high resistivity deviceis changed to a lower resistance level. The charge density and the geometry of theI-region determines the resistance of the diode. The diode current which in turn alsorelates the resistance of the diode, is related to the charge by Eq.46
If =dQ
dt+
Q
τ(46)
where Q is the total charge stored in the PIN diode and If is the forward current. AtDC where the charge is constant, the only term remaining is
QDC = τIf (47)The resistance of the diode is inversely proportional to Q and can be expressed by
Eq.48
Rs =W 2
(µn + µp)τIf(48)
where µn and µp is the electron and hole mobility respectively and W is the width ofthe I-region. This shows how the diodes resistance is lowered by applying more DCcurrent. The typical I-V characteristic of a PIN diode is given by Eq.49.
Thomas Sørensen Yassin 56 of 113

'Master thesis' August 31, 2006
Id = Is ·[e
qNkTj
(Vd−IdRs) − 1]
(49)
where Is is the saturation current, N is the ideality factor, q is the electron charge, kis boltzmann constant and T is the physical temperature of the diode.
The lifetime determines the lower frequency limit of the device. At DC and lowerfrequencies the device operates as a normal PN diode. This means that a signal wouldbe rectied and distorted. As the frequency increase and the time period decreasesto well under the carrier lifetime, the PIN diode begins to act as a variable resistancecontrolled by the DC current. This can also be put in another way, the charge buildup by the DC current should be much larger than the charge added or removed bythe RF current. If not then the RF signal will modulate the DC charge. This meansthat the diode should be operated at f > 10fc where fc is given by Eq.50
fc =1
2πτ(50)
where τ is carrier lifetime.The above condition can also be put in the following condition where the stored chargeQ, must be much greater than the incremental charge added or removed by the RFcurrent Irf
QDC >> Irf/2πf (51)where QDC is the charge buildup by the DC current.
The carrier lifetime is determining the low frequency limit of useful operation. Itcan also be seen that the lower the operating frequency, the higher a carrier lifetimeis required.
When operated in reverse bias the I-region is swept clear of charges and the devicecan be seen as a plate capacitor and a parallel resistance usually in the range of kiloohms. The capacitance is determined by the well know expression given in Eq.52.
Ct =εA
W(52)
where A is the area of the diode junction and W is the width of the I-region. It shouldbe noted that the width of the I-region is inuencing the resistance and capacitancein opposite ways. This means that an increase in W would minimize the capacitanceunder reverse bias, but increase the "ON" resistance. So this is a compromise which isdetermined by the application of the device. By the previous PIN diode description,it is possible to construct equivalent circuits of the diode under forward and reversebias. These are shown in Fig.45.
The resistance under forward operation is constant with respect to the RF signal.It should be mentioned that these two circuit are very simplied as a real diode wouldalso be inuenced by the package parasitics. Usually a parallel capacitance and aseries inductance could be added.
11.3 Switch topologiesHaving discussed the PIN diode characteristics, it is actually very easy to use the
Diode as a switch. We start by looking at Fig.46 and Fig.47 where the two mostsimple switch congurations are shown.
Thomas Sørensen Yassin 57 of 113

'Master thesis' August 31, 2006
R p C t R s
Figure 45. (Left)Simplied PIN diode model under reverse bias. (Right)SimpliedPIN diode model under forward bias.
Figure 46. SPST switch with diode in series conguration. Also shown is the equiv-alent circuit.[8]
The switch with the diode in series is connecting source and load under forwardbias and isolate the load under reverse bias. The opposite is true for the switch withthe diode in parallel. For these two simple conguration it is possible to calculate theinsertion loss if only the "ON" resistance is considered
I.Lseries = 20log(
1 +RI
2Z0
)(53)
I.Lshunt = 20log(
1 +Z0
2RI
)(54)
The two circuits behaves dierent with respect to insertion loss and isolation. Theseries circuit is characterized by a low insertion loss due to the very small "ON" re-sistance. When the diode is "OFF" it is not completely isolating the load, as thereis a signal path through the capacitance as shown in Fig.45. The diode in series con-guration is therefore well suited if insertion loss is of highest priority. Generally theinsertion loss and power handling properties of the series conguration is dependenton the forward resistance and the isolation on Ct.
The opposite can be said of the shunt conguration, this will exhibit a very goodisolation due to the low forward resistance. The insertion loss will primarily be de-pendent on Ct. The power handling of the shunt conguration is usually better thanthe series conguration as no element is in series with the transmission line. It ispossible to make more complex designs using more than one diode. These are usuallynecessary when the isolation of diode is not sucient, although it will lead to a furtherincrease in insertion loss. Two such examples of this is shown in Fig.48 and Fig.49.
These switches both have higher isolation and little increase in insertion loss. The
Thomas Sørensen Yassin 58 of 113

'Master thesis' August 31, 2006
Figure 47. SPST switch with diode in shunt conguration. Also shown is the equiv-alent circuit.[8]
Figure 48. SPST switch with diodes in series and shunt conguration.[9]
circuit in Fig.48 needs a more complex bias circuitry as one diode needs to be forwardand the other reverse biased, also the VSWR is increased. The switch in Fig.49 hasan increase in insertion loss due to the two diodes in series. This can be adjustedby increasing the bias current. The RF voltage across the diodes is half of whatwould have been over one diode and the isolation is increased by 6 dB because thecapacitance is also halved. Table 17 summarizes the isolation and insertion loss of theSPST switches just described.
Type Insertion loss(dB) Isolation(dB)Series 20log
(1 + Rs
2Z0
)10log
(1 + 1
(4πfCtZ0)2
)
Shunt 10log(1 + (πfCtZ0)2
)10log
(1 + Z0
2Rs
)
Series-Shunt 20log(1 + Rs
2Z0+ (πfCt)2(Z0 + Rs)2
)10log
((1 + Z0
2Rs
)2+ 1
4πfCtZ0
(1 + Z0
Rs
)2)
Table 17. Summery of SPST switches.
11.3.1 Multi-throw switchesSwitches that can direct the input to more than one output is called multi-trow
switches. This kind of switch can be considered to be two SPST switches joined inparallel. Two examples are shown in Fig.50.
The advantage of the SPDT switch is that not only is it possible to direct thewanted signal to more than one output, but the isolation is increased as well. Becausethe "OFF" arm is shunted by the "ON" arms Z0, the voltage is halved and theisolation is increased by 6 dB. This is only valid if the generator and load impedance
Thomas Sørensen Yassin 59 of 113

'Master thesis' August 31, 2006
Figure 49. SPST switch with diodes in tuned conguration.[9]
(a) Series SPDT switch. (b) Shunt SPDT switch.
Figure 50. Examples of SPDT switches using series and shunt diodes[9].
is equal. The SPDT switch in Fig.50(a) is just two SPST switches in parallel. Thiswill give the advantages just stated, but will still suer from poor isolation. Theswitch in Fig.50(b) has very high isolation. The λ/4 sections are used so the isolatedport will not load the port that is "ON". This is because the diode in the transmittingarm is reverse biased and the isolating arm is forward biased. The drawback is thenarrow band eect of the λ/4 sections. The isolation can be increased by adding moresections, but this will also lead to an increase in insertion loss and even more narrowbanded operation. Despite this it is a very used conguration and will also be used forthe switch to be designed, because the power handling is better than series connecteddiodes. When the SPST switches are OFF they do not absorb power but reect almosteverything. This is a problem that needs to be taken care of or else it could lead tostanding waves that could damage the transmitter. The SPDT switches do not havethis problem as one port is always "ON" and therefore no power is reected.
11.4 The UP1001 PIN diodeDue to the power requirement of the switch it is important to nd a diode that
has a very low "ON" resistance. Otherwise a substantial amount of power could bedissipated by the diode/switch. A search for a suitable PIN diode was done as it wasimportant that it had a low "ON" resistance and a high reverse voltage rating. By
Thomas Sørensen Yassin 60 of 113

'Master thesis' August 31, 2006
using an approximation of 80W(49 dBm) for the maximum power the diode shouldhandle, the peak voltage and current on a Z0 = 50 Ω transmission line can be calcu-lated to be
Vp =√
P · 2 · Z0 =√
80 · 2 · 50 = 89.4V (55)
Ip =Vp
Z0= 89.4/50 = 1.78 A (56)
Depending on the switch conguration and the diodes dynamics parameters thisis the maximum voltage and current the diode should be able to handle withoutdamaging eects. As explained in Section 11.2 the PIN diodes critical parameters isthe "ON" resistance(Rs) and the reverse bias capacitance (Ct). These are a functionof geometry of the PIN diode. Usually we would like a very small Rs and Ct but thetwo are pulling in dierent directions. So it is a choice to have a low Rs and high Ct
or visa versa. At the same time a high power handling diode means a diode that isgeometrically large meaning a small Rs and a larger Ct. For this switch design it wasimportant to have a diode that would give a high isolation, so the LNA input wouldnot be saturated or damaged. Also the speed at which the PIN diode can be turnedON and OFF is very important. This is where the carrier lifetime is important. Thisshould be as low as possible. A search for a suitable PIN diode was conducted, but itproved to be a little dicult to get PIN diodes. Either the diode was not suited for theswitch or else the vendors would not supply. In the end a PIN diode from Microsemiwas found that would satisfy the requirements. The PIN diode is UPP1001 fromMicrosemi and its electrical parameters are shown in Table.18
Test Min. Typ. Max. Units ConditionsDiode resistance Rs 0.75 1 Ω 100MHz, 10mADiode resistance Rs 0.35 0.75 Ω 100MHz, 50mACapacitance Ct 1.2 1.6 pF 1MHz, 100VReverse current IR 0.1 10 µA rated voltageCarrier lifetime τ 2 3.5 µS 10mAParallel resistance Rp 5 8 KΩ 100MHz 0VForward voltage Vt 0.75 1 V 50mA
Table 18. Electrical specications of the UPP1001 PIN diode taken from thedatasheet.
From the table it can be seen that the forward resistance is very low which is good.The capacitance Ct is relatively low, but is a compromise because the Rs is so low.The carrier life time could become a problem due to the fast switching when shortpulses are needed, but this will be tested in the measurements of the switch. Themaximum reverse bias this diode can handle is 100V which is sucient according toEq.(55). The diode can dissipate a maximum of 2.5W at a temperature of 75, whichshould be more than enough.
To be able to predict the behaviour of a switch consisting of a PIN diode, it isnecessary to have a model of the PIN diode. This will be a mixture of measured datafrom the datasheet and parameters extracted from the datasheet. There exists a kindof recipe on how to build such a model and this will be the basis of the next section.
Thomas Sørensen Yassin 61 of 113

'Master thesis' August 31, 2006
11.4.1 PIN circuit modelThe basis of building the PIN model is based on a SPICE model proposed by Joe
Walston in 1992[40]. The article describes a model for a PIN diode that can be usedin forward operation only and can not be used for transient properties. This meansthat it is limited but it can still be used to give an indication on the RF performance.The model is shown in Fig.51.
Figure 51. Nonlinear model of PIN diode.
The model uses three resistors to model the resistance Rs under forward DCcurrent. Rmin is set to the minimum value at rated forward bias, Rmax is set to themaximum value at reverse bias and Rvar is a variable resistance that simulates thevariable resistance nature of the PIN diode with forward current. The diode is anideal PN-diode and it takes care of the slope of the IV-curve as well as some of thejunction capacitance. In the datasheet for a PIN diode, the total capacitance is oftenspecied at zero or reverse bias. The intrinsic capacitance of the PIN diode can befound by subtracting the package capacitance, if this is given. In Fig.52 the datasheetsIV-curve and total capacitance for the UPP1001 is shown
(a) IV-curve from datasheet. (b) Total capacitance form datasheet.
Figure 52. Measured data from the UPP1001 PIN diode datasheet.
The rst thing to do when building the model, is to evaluate the DC characteristicsof the PIN diode. This can be done by either using the datasheet curves or bymeasurements on the diode. Since parameter extraction from the datasheet is not
Thomas Sørensen Yassin 62 of 113

'Master thesis' August 31, 2006
that precise, the extraction will be based on measurements. This is done by applyinga forward and reverse voltage across the diode and measure the current. This wasdone with a Keithly 2602 SMU(Source Measurement Unit). The Keithly can onlydeliver a maximum current of 3A which is not enough if the full characteristic shouldbe made, but no other instrument was available that could deliver precise enoughmeasurements. In the datasheet the diode is specied up to 10A at a forward voltageof 1.4V. In practice the current in the diode will be much lower anyway as the ONresistance is already very low at 50mA. The measured I-V characteristic is shown inFig.53
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.20
0.5
1
1.5
2
2.5
3
Forward voltage (Vf)
For
war
d cu
rren
t (I f)
Figure 53. The I-V characteristic of the UPP1001 PIN diode.
This curve can be expressed by Eq.(49) which is reproduced in Eq.(57) for conve-nience
Id = Is ·[e
qNkTj
(Vd−IdRs) − 1]
(57)
By evaluating this equation, it can be seen that there are three parameters whichcontrols the IV-curve. This is the saturation current(Is), the ideality factor(N) andthe series resistance(Rs). By manipulating Eq.(57) a straight line can be produced inlogarithmic scale.
Id = Is ·[e
qNkTj
(Vd−IdRs) − 1]
(58)
log10(Id) ≈ log10(Is) +( q
NkT(Vt − IdRs)
)/ln(10) (59)
log10(Id) ≈ log10(Is) +( q
NkTVt
)/ln(10) (60)
There are made two assumptions, rst that the saturation current is very small and canbe neglected in Eq.(58), second that we are evaluating the expression at low currentlevels, which means that the term IdRs is zero in Eq.(59). Now Eq.(60) represent astraight line evaluated on logarithmic scale. This is shown in Fig.54.
From Eq.(60) the slope is determined by qNkT where N is unknown. The crossing
on the x-axis is determined by log10(Is). By extending the curve in Fig.54 to zero thereading will give the saturation current Is. Two points on the curve where the currentis low so Eq.(60) is still valid, are used to nd N.
Thomas Sørensen Yassin 63 of 113

'Master thesis' August 31, 2006
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.210
−7
10−6
10−5
10−4
10−3
10−2
10−1
100
101
Forward voltage (Vf)
For
war
d cu
rren
t (I f)
Figure 54. The I-V characteristic with the current in logarithmic scale.
α =log(I2)− log(I1)
V2 − V1(61)
N =q
kTα(62)
The resistances Rmin and Rmax are taken from the data sheet as a rst estimate.The variable resistance Rvar can be described by Eq.(63)
Rvar =A
IKf
(63)
This shows a resistance that decreases with increasing current. A and K are ttingparameters. It is possible to extract A and K. This is done by considering the linearpart of the resistance curve under forward operation as shown in Fig.55. By choosingtwo points on the linear curve,(RHi, ILo)(RLo, IHi), the parameter K and A can beexpressed by Eq.(64) and Eq.(65) respectively
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
101
10−1
100
101
102
103
104
105
106
Forward current (If)
Res
ista
nce
(Rs)
Figure 55. Measured resistance of the UPP1001 diode as a function of forwardcurrent.
Thomas Sørensen Yassin 64 of 113

'Master thesis' August 31, 2006
K =log(RHi/RLo)log(IHi/ILo)
(64)
A = RHi · IKLo (65)
The extracted values needed for the model are given in Table 19. Some optimisa-tion is needed and this is mostly done by the tting parameters A and K and Rmin.Some of the parameters are very dierent from the initial values, this can be caused
Is N A K Rmin(Ω) Rmax(Ω)Before optimisation 4.2 nA 1.8744 0.0843 1.01148 0.26 8000After optimisation 4.35 nA 1.8158 0.01651 0.9638 0.03447 8000
Table 19. Extracted parameters for modelling the UPP1001 PIN diode.
by imprecise readings from graphs or uncertainties with the DC measurements. Themodel for the PIN diode can now be implemented in ADS. The measured IV andmodeled characteristic is compared in Fig.56. The gure show a very nice agreementbetween model and measurement, but there is some dierence when reaching thesaturated region.
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.210
−7
10−6
10−5
10−4
10−3
10−2
10−1
100
101
Forward voltage (Vf)
For
war
d cu
rren
t (I f)
Model dataMeasured
Figure 56. Comparison between PIN diode model and measurement.
The last parameter is the capacitance in Fig.51. this is chosen to be a smallfraction of the complete capacitance. The rest is used in Cjo of the ideal diode. Withthe model in place it is now possible to make a switch design where it is possible topredict its frequency response under forward operation.
11.5 Switch designThe switch considered should be a SPDT switch with a very high isolation. Since it
should handle high power, the shunt conguration is a good choice. For this reason theswitch in Fig.50(b) is a reasonable choice. Because isolation is important two stageswith λ/4 section is used. The quarter-wave sections will be made from lumped low-pass pi networks. The schematic for this switch is shown in Fig.57. The componentvalues are calculated using Eq.(34) and Eq.(35). The values are put into Table 20.
To connect the input to one of the outputs, the corresponding arm has to bereverse biased. This means that the capacitance of the diode will reach a value of
Thomas Sørensen Yassin 65 of 113

'Master thesis' August 31, 2006
L C18.294 nH 7.3175 pF
Table 20. Ideal component values for the λ/4 section.
Figure 57. Ideal schematic of SPDT switch.
1.2 pF. This value can be incorporated into the capacitance of the λ/4 section. Whenthe diode is forward biased, the capacitance of the diode becomes quite large, butthe resistance will be very small (' 0.2Ω) so this will be completely dominated byRs. The capacitors are again from ATC and the inductors are from Coilcraft. Thecomponent values for the circuit in Fig.57 are given by Table 21
C1 C2 C3 C4 L1 L2
2.7//4.7 pF 3.9//3.3 pF 3.9//3.3 pF 3.9//3.3 pF 18.5 nH 18.5 nH
Table 21. Real component values for the λ/4 section.
When the diode are forward biased from 100mA and up, it is expected that thefrequency response should not change a lot as the forward resistance is already below1Ω, according to Fig.55. A layout was made and a complete simulation was doneincorporating the layout. The complete schematic with the layout is shown in Fig.58.
The simulation results are shown in Fig.59(a) and Fig.59(b). Only one output armis simulated as they are identical.
In the simulation, it has to be mentioned that the incorporation of the layout,showed that some of the ideal component values had to be modied. The frequencyresponse was shifted down in frequency to around 325MHz. This is an eect of theparasitic inductance coursed by the circuit layout. This meant a change in the initialinductor values. By changing these from 18.5 nH to 8 nH the response was moved upin frequency to around 440MHz.The measured result between port 1 and port 2 is shown in Fig.60. The port numberingis shown in Fig.57.
The agreement between simulated and measured are pretty good, despite someadditional losses in the real circuit. The measured frequency response between port
Thomas Sørensen Yassin 66 of 113

'Master thesis' August 31, 2006
Figure 58. Schematic of SPDT switch with layout incorporated.
(a) The simulated transmission from input to out-put. The diode are each biased with 200mA0.85V. and the OFF arm is reversed biased with-20V.
(b) The simulated reection coecients.
Figure 59. Simulation results of the SPDT switch.
Thomas Sørensen Yassin 67 of 113

'Master thesis' August 31, 2006
(a) The measured transmission from port 1 toport 2. The diode are each biased with 285mA0.85V. and the ON arm is reverse biased with-20.1V.
(b) The measured reection coecients of port 1and port 2.
Figure 60. Measurement transmission of the SPDT switch from port 1 to port 2.
1 and port 3 is shown in Fig.61 and the isolation for both port 2 and port 3 is shownin Fig.62.
(a) The measured transmission from port 1 toport 3. The diode are each biased with 285mA0.84V. and the ON arm is reverse biased with-20.1V.
(b) The measured reection coecients of port 1and port3.
Figure 61. Measurement results of the SPDT switch from port 1 to port 3.
The layout of the switch is shown in Appendix G. Here the ground is placed inthe middle, which is important as this gives the same reference for both switch arms.This is necessary if the switch shall have even performance for both arms.
One problem with the switch is the bandwidth, as already mentioned this is pro-hibited by the λ/4 sections. However they are necessary if high isolation is the toppriority. The return loss will be a problem because the switch is located after thepower ampliers. A -12 dB return loss is observed across the full frequency range.This corresponds to 5% power reected, so with an input power of 80W this corre-sponds to a return loss of 4W. Another thing is the insertion loss of <0.7 dB. Thismeans that some 5-6W has to be dissipated by the switch or more precisely the induc-
Thomas Sørensen Yassin 68 of 113

'Master thesis' August 31, 2006
(a) The measured isolation from port 1 to port 2.The diode are each biased with 285mA 0.84V.and the ON arm is reverse biased with -20.1V.
(b) The measured isolation from port 1 to port 3.The diode are each biased with 285mA 0.84V.and the ON arm is reverse biased with -20.1V.
Figure 62. Measurement isolation of the SPDT switch.
tors as these are the main loss contributors. The insertion loss is slightly larger thanpredicted, due to the losses in the inductors. The insertion loss is also a consequenceof the isolation requirement, meaning that more than one section is used. The balancebetween the individual arms are very good over the frequency range, with a variationof less than 0.2 dB. An isolation better than -41 dB is achieved across the bandwidthand approaching -45 dB at the lower frequency limit. This can be regarded as a verygood result, considering the switch is very compact(19 x 63 mm). By careful design,it is believed that the size of the switch can be further reduced.
Since this was the last design in the project, there was no time to improve anyof these things. So it will be used as the switch in the nal measurements. Thelow reverse voltage of -20.1V at the "OFF" diodes is sucient, because of the λ/4sections. These sections transform the low impedance to a high impedance. Withoutthese and with the full power incident on the switch, the incident voltage would belarge enough to force the diodes to rectify.
11.6 Transient measurementSince the switch is going to be switched "ON" and "OFF" many times. It is
interesting to see how the switch reacts. The switch is applied a signal of 0 dBm. Oneport was "OFF" while the other had a square wave applied. The square wave hada maximum of 2V and a minimum of -13.7V. The switching frequency was 10KHzwhile the input frequency was 430MHz. The time signal is shown in Fig.63.
By zooming in on the beginning and the end of the time signal, shown in Fig.64,it is seen how there is a large negative peak at the beginning reaching some 1.6V.When the switch is turned OFF there is a transient going negative with a peak of3V. These peaks are not very large at this particular power level, but increasing thepower to 50W or more would generate even larger spikes. Although this is not anactual plot of the DC feed inductor current or voltage, it could just as well have beena plot of those. Here spikes/peaks will be generated by the feed-inductors, as theDC current is turned o. The inductor tries to maintain the current by generatinga voltage of opposite polarity to maintain the same magnitude and direction of thecurrent. Therefore it could be necessary to use a diode in parallel with the inductor,
Thomas Sørensen Yassin 69 of 113

'Master thesis' August 31, 2006
Figure 63. Transient response of the output signal with bias turned On and OFF.The scale is 40 µs/div and 1.0V/div.
(a) Zoom of the turn ON of switch. The scale is400 nS/div and 333mV/div.
(b) Zoom of the turn OFF of switch. The scale is400 nS/div and 500mV/div.
Figure 64. A zoom in on the transition from "ON" to "OFF" for the switch.
that only conducts when the bias current is turned o.Maybe the most interesting thing is the time it takes for the switch to reach a
stable point. From Fig.64(a) the signal stabilize in some 1.2µs. With a pulse lengthof 50µs and a PRF of 10KHz, it gives a duty cycle of 50%. The above is clearlyshowing that the switch is not fast enough. If a lower duty cycle is used, the problemis reduced as the switch can be turned on before applying the pulse and o after thepulse. The approach to turn the switch on before applying a pulse, should be usedanyway as this ensures a more reliable operation, instead of doing a HOT and COLDswitching. Also the fact that this switch is a reect switch makes it important not tohave high power present at the input port, as this will have to be reected back tothe HPA or other circuitry in front of the switch.
DC bias network So far the need to bias the switch has not been considered. Thebias network for a switch is very important, as this can have a huge inuence onthe insertion loss as well as the isolation. In all the simulations and measurement,the bias has been made up by a 120 nH inductor. If the switch should be used insome complex network with several switches that has to open or close at very specictime moments, it is necessary to have a bias network that can be controlled by somedigital signal, where it is possible to measure the switch time. As these signals are
Thomas Sørensen Yassin 70 of 113

'Master thesis' August 31, 2006
+Vcc
To PIN diode
-Vcc
Figure 65. Bias circuitry for the control of PIN switch
not high( around 5V) and only able to deliver low currents, some other circuitry isrequired to be connected to the switch. Do to time constraints this was unfortunatelynot implemented, but a circuitry was obtained, that could be used. This is shown inFig.65.
The digital control signal is applied to the input of the buer. The buer is usedto turn "ON" the FET, which operates as a switch. The buer is necessary becausethe digital signal, as explained, cannot deliver a high enough current. Also the inputcapacitance of the FET has an inuence on how quickly the FET is "ON", so themore current the faster the switching time.
11.7 SummaryThe design of a high power switch has been presented in this chapter. A suitable
PIN diode was selected and a model of this was made. Some dierent designs wereexplained and a suitable one selected. The results corresponded well with simulationsand were also very satisfactory regarding insertion loss and bandwidth. The switchwas also tested with high power(50W), which it handled with no problems.
Thomas Sørensen Yassin 71 of 113

'Master thesis' August 31, 2006
12 AntennaThe antenna for every communication or radar application is highly important.
This is the component that will determine how the signal power is distributed in spaceas well as collecting the received signal. The antenna can be seen as the "eye" of thecomplete radar. This means that the radar should be made such, that it only needsto see what is important and not things that can disturb the system performance. Bythis is meant signals other than the intended. The prole of the antenna is also veryimportant as this has to be located on the fuselage of an aircraft. Therefore this hasto be considered as well. There exists many dierent antennas that each has its ownadvantage and disadvantage. Just to name a few and their features
• Spiral(Wideband)
Low to moderate gain Real input impedance Wide bandwidth
• Patch/yagi
Low to moderate gain Real input impedance Narrow bandwidth
• Horn/reector
High gain Moderate bandwidth Gain increase with frequency
The following will describe the selection of antenna used for the P-sounder system,together with the features of the selected choice and the results.
12.1 Antenna selectionThe P-sounder antenna has some requirements it needs to fulll. In addition to the
bandwidth requirements of 20% there is the suppression of across-track surface clutter,dual polarization capabilities, low sidelobe level and capable of synthesizing circularpolarization. There exists several antennas that can fulll the frequency requirement.This could be achieved by the Yagi antenna and/or the microstrip patch antenna,although the Yagi antenna also fullls the requirements regarding frequency[11]. Thechoice of antenna has fallen upon the microstrip patch antenna. The antenna waschosen because it was found that placing the antenna under the wing would aectthe aerodynamics. The antenna should be placed in the rear of the aircraft. Here itis crucial that the antenna has a low prole, as the microstrip patch antenna. Themicrostrip patch antenna has been widely used in SAR++ and EMISAR projects atØrsted·DTU. The P-sounder system requires a nadir looking antenna beam. Thisimplicates that the antenna has to be located either under the aircraft body or underthe wing. The Yagi and microstrip patch antenna are dierent when it comes tomounting. The patch antenna requires a ground plane for electrically operating as
Thomas Sørensen Yassin 72 of 113

'Master thesis' August 31, 2006
(a) (b)
Figure 66. Showing the bandwidth and eciency variations vs. substrate thicknessand dielectric constant[10].
desired, whereas the Yagi does not. Due to its low prole and easy fabrication, theantenna is well suited for operation on an aircraft. The selection of the patch antennais the basis of the P-sounder antenna.
12.2 Bandwidth improvementIn the case of the antenna for the P-sounder, the microstrip patch antenna has the
unfortunate property of being a narrow banded device. The bandwidth specied hereis the impedance bandwidth. The bandwidth limitations are usually a consequence ofthe thin substrate between patch and ground plane[10]. However there exists methodsto increase the bandwidth.
By evaluating Fig.66, the impedance bandwidth can be increased considerably byincreasing the thickness of the substrate together with a low dielectric constant(εr).This will also keep the surface losses low. So by increasing the thickness of thesubstrate, the impedance bandwidth is increased. The disadvantage of this feature isthat the input impedance is not real anymore, which is a feature of the resonant patchantenna. Instead it turns inductive, therefore some feed mechanism needs to be usedto oset this eect.
12.3 Feed mechanism designUsually the antenna pattern is much larger than the impedance bandwidth[10].
This means that some procedure has to be done to broaden the impedance match ofthe antenna.There exists numerous ways of making an impedance match. Some of these will beexplained next. The standard stub matching networks can increase bandwidth to acertain degree. The advantage of standard stub matching is an antenna element thatcan remain unchanged and the feeding network can be hidden behind the groundplane, so it will not inuence the radiation pattern. However the disadvantages areseveral. The feed network would require another substrate and it can take up spacewhich is needed for other purposes. Fig.67 show some additional structures that canbe utilized to match thick substrate antennas.
The structures can be split into two: (B, C, E and K) use series capacitive com-pensating elements. (F-I) recreates the coaxial structure. D and L is a compensatingstub and L is a compensating inductive element respectively. This structures shouldeither compensate the inductive eect of the long probe or create a second resonance.
Thomas Sørensen Yassin 73 of 113

'Master thesis' August 31, 2006
Figure 67. Dierent excitation structures with matching elements.
Figure 68. Example of edge coupled patch antenna.[10]
Another approach is to employ edge-coupled patches. The can increase the bandwidthby adding closely spaced resonances. One patch is driven and the other is coupled.These setup can achieve relatively large bandwidths. They can be fabricated on onlyone substrate and they are planar. They also exhibit some disadvantages. Due todierent patches, they radiate with dierent phase and amplitude at dierent fre-quencies. The radiation pattern will change a lot over the operating frequency. Thesize of the antenna can be large and the separation between patches can introducegrating lobes. This arrangement is shown in Fig.68.
By stacking one or several patches on top of each other it is possible to widenthe bandwidth. Often these have almost the same size, so closely spaced resonancesoccur. The arrangement is so that one patch is excited and the other is coupled. Theadvantage is that stacking of the patches will require less space than the edge coupled.This is suitable for array congurations as it will not introduce grating lobes. Havinga parasitic patch a distance above or below the driven, can also make it easier tooptimise to the correct input impedance. The drawback is that is needs more thanone substrate.This section described a few of the feeding mechanisms that have broadbanding eect.The last method which is being used for the P-sounder antenna is to use capacitive feedpatches. The thick substrate of the antenna demands long feed probes introducinginductive behaviour. This is oset by a capacitive coupling. This idea is illustratedin Fig.69.
It can be seen to consist of a small feed patch next to the resonant patch. The
Thomas Sørensen Yassin 74 of 113

'Master thesis' August 31, 2006
Figure 69. Patch antenna with capacitive probe feeds.[10]
feed patch could also have been circular. The gap between feed patch and resonantpatch behaves as a capacitor in series which oset the inductive nature of the longprobe. The size of the probe patch and the distance to the resonant patch can be usedto adjust the input impedance of the antenna. The gab will have a dominating eecton the real part of the input impedance, whereas the size of the patch will generallybe dominating the input reactance. The smaller the patch size and the larger the gabbetween feed patch and resonant patch the larger the capacitance. The general trendis that the thicker the substrate(εr=1 air) the smaller the feed patch and the furtherthe feed patch and resonant patch should be apart[10]. The eect of the feed patchdimensions and gab is shown in Fig.70. To summarize, the substrate and resonantpatch size determines the frequency and bandwidth. The size of the feed patch andthe gap between feed patch and resonant patch determines the input impedance ofthe antenna. The advantage of this feed type is that only one substrate is needed.The substrate for large antennas can be expensive especially when a complete arraymust be build. The area of the feed patch and resonant patch is not much largerthan the resonant patch itself and therefore it is well suited for array applications.The feed patches will not only help to restore the bandwidth, but unfortunately alsointroduce higher-order modes occurring in thick substrate antennas. This can bereduced by using more feed patches. However the coupling is also increased if thefeed patches are located opposite each other and therefore shorting pins can be placedbetween resonant patch and ground plane[41]. The next section will present the nalP-sounder antenna which is based on these capacitive feed patches.
12.4 The P-sounder antennaThere has been developed a total of three linear polarized antennas for the P-
sounder project. They are all very similar in radiation properties and impedancebandwidth, but the cross polarization is a little dierent for the antennas. The probeshave been designed to have a diameter of 5.9mm as this is the correct value for asatisfying impedance bandwidth. But it is a little dicult to t this to a connector so
Thomas Sørensen Yassin 75 of 113

'Master thesis' August 31, 2006
Figure 70. Input impedance of patch antenna with a length of 52 x 52 mmat 1.8GHz as a function of probe dimensions. (a) Gap width be-tween rectangular resonant patch and capacitor patch(keep l=5mmand w=10mm). (b) Length of the capacitor patch (keep d=8mmand l=5mm). (c) Width of the capacitor patch (keep d=8mm andw=10mm).[10]
L x L (mm) thickness (mm)Ground plane 500 x 500 3Foam 500 x 500 85Substrate 350 x 350 1.52Resonant patch 230 x 230 0.035feed probes 25 x 60 0.035
Table 22. Dimensions of the Foam antenna.
a small modication has been done, which narrows the connector down from 5.9mm to2.4mm in diameter. This can t inside an N-connector. The substrate of the antennasis RO4003C from Rogersr with a dielectric constant of 3.38. The substrate has avery low moisture absorbtion and low temperature coecient. The foam is Rohacellwith a dielectric constant of 1.05 (air). This is a fairly strong material and good RFproperties which is low loss. All simulations are done with CST Microwave Studior.For the practical measurements the antennas are tted with a nite ground plane of 1x 1m. This is an approximation of the innite ground plane used in the simulations.
12.4.1 Foam antennaThis is a basic design with a ground plane with foam and a substrate build on top.
The antenna is shown in Fig.71.The dimension of the antenna is given in Table 22.The simulated radiation pattern and s-parameters are shown in Fig.72 and Fig.73
respectively.The antenna gain is expected to be around 7 dBi. It can be seen that the beam
is slightly tilted. The cross-polarization and gain of the antenna is shown in Fig.74.The cross-polarization is 17.9 dB and 17.8 dB for the 0 and 90 respectively. Thisis not a particular satisfying result compared to the Cavity antenna discussed in the
Thomas Sørensen Yassin 76 of 113

'Master thesis' August 31, 2006
Ground plane
Foam Feed probes
Resonant patch
Substrate
Figure 71. P-sounder Foam antenna.
Figure 72. Radiation pattern of Foam antenna.
Thomas Sørensen Yassin 77 of 113

'Master thesis' August 31, 2006
Figure 73. S-parameters of Foam antenna. Notice that S11 = S22 and S21 = S12.
−150 −100 −50 0 50 100 150−40
−35
−30
−25
−20
−15
−10
−5
0
5
10
theta
dBi
φ=0°
θ componentφ component
(a) Plot showing the θ and φ component ofthe directivity with φ = 0
−150 −100 −50 0 50 100 150−40
−35
−30
−25
−20
−15
−10
−5
0
5
10
theta
dBi
φ=90°
θ componentφ component
(b) Plot showing the θ and φ component ofthe directivity with φ = 90
Figure 74. Showing the simulated directivity components with two cuts of the Foamantenna. Each plot contains the co- and crosspolarization.
next section.
All measurements were done at IMST, Kamp-Lintfort, as the DTU measurementfacility was busy. All the measurements have some degree of uncertainties due to re-ections from the walls. It was found that signals below -30 dBi could not be obtainedprecisely due to the room noise level. The return loss measurements were done atØrsted DTU. The measurement setup at IMST is shown in Fig.75.
The measured data for the horizontal polarization is shown below in Fig.76 andFig.77.
The maximum directivity is reached at 475MHz indicating a higher operatingfrequency. The directivity at 435MHz is distorted and lower than the expected. Thenite ground plane can also been seen to give some backward radiation. The H-planeis also seen to be shifted in frequency.
Thomas Sørensen Yassin 78 of 113

'Master thesis' August 31, 2006
Figure 75. Foam antenna and its measurements xture at IMST.
-180 -150 -120 -90 -60 -30 0 30 60 90 120 150 180
-25
-20
-15
-10
-5
0
5
10
15
(deg)
380 MHz 400 MHz 415 MHz 435 MHz 455 MHz 475 MHz 485 MHz
-180-150-120 -90 -60 -30 0 30 60 90 120 150 180-50
-45
-40
-35
-30
-25
-20
-15
-10
-5
(deg)
380 MHz 400 MHz 415 MHz 435 MHz 455 MHz 475 MHz 485 MHz
Dire
ctivity (
dB
)
Dire
ctivity (
dB
)
Figure 76. Measured directivity for the Foam antenna with φ = 0(E-plane).
Directivity (
dB
)
Directivity (
dB
)
-180 -150 -120 -90 -60 -30 0 30 60 90 120 150 180-50
-45
-40
-35
-30
-25
-20
-15
-10
-5
0
5
(deg)
380 MHz 400 MHz 415 MHz 435 MHz 455 MHz 475 MHz 485 MHz
-180 -150 -120 -90 -60 -30 0 30 60 90 120 150 180-20
-15
-10
-5
0
5
10
(deg)
380 MHz 400 MHz 415 MHz 435 MHz 455 MHz 475 MHz 485 MHz
Figure 77. Measured directivity for the Foam antenna with φ = 90(H-plane).
Thomas Sørensen Yassin 79 of 113

'Master thesis' August 31, 2006
12.4.2 Cavity antennaThe dierence between this antenna and the previous is the box containing the
antenna. The box has the purpose of reducing the side-lobes of the antenna and alsoto simulate the antenna in its real environment when it is mounted on the aircraft.The dimensions of this antenna is given in Table 23 and the antenna is shown inFig.78.
Metal box
Substrate
Feed probes
Resonant patch
Figure 78. P-sounder Cavity antenna. The whole antenna is enclosed in a metalbox.
L x L (mm) thickness (mm)Ground plane 440 x 440 3Foam 437 x 437 85Substrate 400 x 400 1.52Resonant patch 220 x 220 0.035feed probes 22 x 40 0.035
Table 23. Dimensions of Cavity Antenna.
The simulated and measured radiation pattern and s-parameters are shown inFig.79, Fig.80 and Fig.81 respectively.
There is a very good agreement between the measured an simulated response onboth ports. They are also almost equal which also should be expected. The crosscoupling is a little higher, around 2 dB and have a maximum of -16 dB at 475MHz.In the main band it is well below -20 dB was is good. The return loss is not measuredin an anechoic chamber, but instead the antenna was placed facing the sky, to have aminimum of reections. A potable VNA was used for this measurement. The antennagain and the cross-polarization for two cuts are shown in Fig.82.
This is shown only for one port as they are the same, just with the φ and θcomponents switched. The cross-polarization is quite low, 23 and 26 dB respectively.The beam is slightly tilted, this could not be seen in Fig.79, but it is coursed by theoverlap of the ground plane seen in Fig.78.The measurement of this antenna was also conducted in IMST and the measurementsetup can be seen in Fig.83.
The measured radiation patterns for the Cavity antenna in the horizontal polar-ization is shown in Fig.84 and Fig.85
Thomas Sørensen Yassin 80 of 113

'Master thesis' August 31, 2006
Figure 79. Simulated radiation pattern of Cavity antenna.
3.5 4 4.5 5
x 108
−40
−35
−30
−25
−20
−15
−10
−5
0
Frequency (Hz)
dB
MeasuredSimulated
(a) The return loss from the horizontal port.
3.5 4 4.5 5
x 108
−28
−26
−24
−22
−20
−18
−16
−14
−12
Frequency (Hz)
dB
MeasuredSimulated
(b) The cross coupling from the horizontal to thevertical port.
Figure 80. Comparison between simulated and measured data for the Cavity an-tenna, when a signal is exciting the horizontal port.
Thomas Sørensen Yassin 81 of 113

'Master thesis' August 31, 2006
3.5 4 4.5 5
x 108
−40
−35
−30
−25
−20
−15
−10
−5
0
Frequency (Hz)
dB
MeasuredSimulated
(a) The return loss from the horizontal port.
3.5 4 4.5 5
x 108
−28
−26
−24
−22
−20
−18
−16
−14
−12
Frequency (Hz)
dB
MeasuredSimulated
(b) The cross coupling from the vertical to thehorizontal port.
Figure 81. Comparison between simulated and measured data for the Cavity an-tenna, when a signal is exciting the vertical port.
−150 −100 −50 0 50 100 150−40
−35
−30
−25
−20
−15
−10
−5
0
5
10
theta
dBi
φ=0°
θ componentφ component
(a) Plot showing the θ and φ component of thedirectivity with φ = 0.
−150 −100 −50 0 50 100 150−40
−35
−30
−25
−20
−15
−10
−5
0
5
10
theta
dBi
φ=90°
θ componentφ component
(b) Plot showing the θ and φ component of thedirectivity with φ = 90.
Figure 82. Showing the simulated directivity components with two cuts of the Cav-ity antenna. Each plot contains the co- and crosspolarization.
Figure 83. Cavity antenna and its measurements xture at IMST.
Thomas Sørensen Yassin 82 of 113

'Master thesis' August 31, 2006
-180-150-120 -90 -60 -30 0 30 60 90 120 150 180-40
-35
-30
-25
-20
-15
-10
-5
0
5
10
15
(deg)
380 MHz 400 MHz 415 MHz 435 MHz 455 MHz 475 MHz 485 MHz Sim 435 MHz
-180-150-120 -90 -60 -30 0 30 60 90 120 150 180-35
-30
-25
-20
-15
-10
-5
0
5
10
(deg)
380 MHz 400 MHz 415 MHz 435 MHz 455 MHz 475 MHz 485 MHz Sim 435 MHz
Dire
ctivity (
dB
i)
Dire
ctivity (
dB
i)
Figure 84. Measured directivity for the Cavity antenna (left) E-plane and (right)H-plane. Both copolarization.
-180-150-120 -90 -60 -30 0 30 60 90 120 150 180-35
-30
-25
-20
-15
-10
-5
(deg)
380 MHz 400 MHz 415 MHz 435 MHz 455 MHz 475 MHz 485 MHz
-180-150-120 -90 -60 -30 0 30 60 90 120 150 180-40
-35
-30
-25
-20
-15
-10
-5
0
5
380 MHz 400 MHz 415 MHz 435 MHz 455 MHz 475 MHz 485 MHz
(deg)
Dire
ctivity (
dB
i)
Dire
ctivity (
dB
i)
Figure 85. Measured directivity for the Cavity antenna (left) E-plane and (right)H-plane. Both cross-polarization.
The results shown are very good. The simulated pattern is shown on the graphs forcomparison. At higher and lower frequencies the gain is larger than the predicted. Thepredicted pattern is slightly tilted. This is an eect of the ground plane overlapping thesubstrate, this was necessary for the mechanical construction. The cross-polarizationin the E-plane is predicted to be lower than -15 dB. This is seen to correspond wellwith the simulations except at the lowest frequency. The cross-polarization in H-planeis having a null in 0, but generally are a little larger than in the simulation.
12.5 P-sounder arrayThe P-sounder antenna system will be based on four antennas. The antennas will
be designed based on a modied version of the Cavity antenna design. To protect theantennas during ight, a parasitic patch is placed on top and ipped for protection.A complete array is shown in Fig.86.
The internal structure of one of the antennas is depicted in Fig.87.The two substrates sub1 and sub2 are of the type R04003C with a dimension of
400 x 400 mm. The thickness is 1.52 mm. The dielectric constant is 3.38. Sub1 hasa patch in the center with a dimension of 261.2 x 261.2 mm. Sub2 has a patch in thecenter with a dimension of 219.4 x 219.4. Sub2 is ipped so the patch is facing Sub1.The rest of the antenna is lled with foam with a dimension of 447 x 447 mm. Theheight of the foam is: h1=29.74 mm and h2=59 mm. The spacing between elementsis 470mm or 0.68λ. There is a trade o between higher gain by separating them moreand creating grating lobes which should be avoided. The complete array has eightports that can be excited in many dierent ways. Some of these will produce a narrowbeam but high sidelobes or a broad beam with low sidelobes. A solution to decrease
Thomas Sørensen Yassin 83 of 113

'Master thesis' August 31, 2006
91.74 mm
1880 mm
470 mm
Figure 86. The P-sounder antenna with outer dimensions.
Figure 87. The internal structure of one antenna with dimensions.
the sidelobes is to use amplitude tapering. One possible excitation scheme is shownin Fig.88.
Figure 88. Excitation scheme for the array.
It is sometimes necessary to excite the antennas with two signals out of phaseto generate the wanted antenna pattern. From Fig.88, a horizontal array is formedby excitation of odd numbered ports: P1+, P3+, P5- and P7-. The vertical arrayconsists of the even ports: P2+, P4-, P6+ and P8-. The two patterns are shown inFig.89.
The horizontal array has a narrow beam in the azimuth plane(across track), witha sidelobe level of nearly 15 dBi. The vertical array exhibits a null in the azimuthdirection. There are many other possibilities, but these would be ton numerous to
Thomas Sørensen Yassin 84 of 113

'Master thesis' August 31, 2006
Figure 89. Antenna pattern of the conguration in Fig.88.(Left) is the horizontalarray. (Right is the vertical array.)
deal with in this project.
12.6 SummaryTwo antennas for the P-sounder have been developed and tested. The rst Foam
antenna showed to deviate from the simulations. The reason for this is still not obvi-ous, but could have something to do with the nite ground plane and the measurementfacilities. The Cavity antenna gave some very good results at least for a rst design.The measurements tted the simulations, with only minor things to improve. Thisantenna will be the basis for further improvements.
Thomas Sørensen Yassin 85 of 113

'Master thesis' August 31, 2006
13 MeasurementsThis chapter contain the measurements of the dierent components for the P-band
ice sounding radar, front-end.
13.1 Power moduleThe power module 45H4047 from Mitsubishi is delivered in a package as shown in
the datasheet. The input and output of the device is matched to 50Ω so no furthermatching is required. A box is designed in aluminium and the drawings of this canbe found in Appendix C. The drawings are made in SolidWorks 2005. The box hasthe benet of serving as a heat sink and to shield the outside world. Besides the box,a PCB is designed that t the pin connection of the module and can be placed in thebox. The entire system is 50Ω so the conducting tracks are also made to be 50Ω. ThePCB is made from simple FR4 with εr = 4.6 and have a height of 1.55mm. By usingTxline from AWR a line width of 2.8mm is calculated. The PCB is GAWP becauseit is necessary to solder the DC supply to the PCB. SMA connectors are used for RFinput and output. The module in its case is shown in Fig.90.
Figure 90. Showing the power module in its case.
Three decoupling capacitors are placed on the drain and gate terminal. Consistingof two 10µF electrolytes in parallel and one chip capacitor of 4.7 nF.
Two power modules are used and the following is measured to characterize the de-vice: compression point, power sweep and input return loss. These are measured at:-10, 0, +10 and +17 dBm. The compression point is measured at the center frequencyof 430MHz, this frequency was chosen so a comparison between measured data anddata from the datasheet could be made.
Before any input power was applied, the devices were tested for stability. Thismeant applying DC power while putting a load on the input and measure the outputwith a spectrum analyser. Both modules were stabile. The power modules will becalled module 1 and module 2. The test setup measuring the power is shown in Fig.91.The output power as a function of frequency at dierent input power levels, is shownin Fig.92.
The modules show almost the same characteristic although a slight dierence isvisible. These modules are showing an output that becomes more at as the input
Thomas Sørensen Yassin 86 of 113

'Master thesis' August 31, 2006
Figure 91. Test setup for measurement of output power.
340 360 380 400 420 440 460 480 500 520 54010
15
20
25
30
35
40
45
50
Frequency (MHz)
Out
put p
ower
, (dB
m)
Input = −10 dBmInput = 0 dBmInput = +10 dBmInput = +17 dBm
(a) Power module 1.
340 360 380 400 420 440 460 480 500 520 54010
15
20
25
30
35
40
45
50
Frequency (MHz)
Out
put p
ower
, (dB
m)
Input = −10 dBmInput = 0 dBmInput = +10 dBmInput = +17 dBm
(b) Power module 2.
Figure 92. Output power measured at dierent input power levels. They are bothbiased with VDD=12.5V and VGG=5V.
Thomas Sørensen Yassin 87 of 113

'Master thesis' August 31, 2006
340 360 380 400 420 440 460 480 500 520 540−21.4
−21.2
−21
−20.8
−20.6
−20.4
−20.2
−20
−19.8
−19.6
−19.4
Frequency (MHz)
Cou
plin
g
Figure 93. Measured coupling factor in dB of the coupler in Fig.91.
−15 −10 −5 0 5 10 15 2025
30
35
40
45
50
Input power (dBm)
Power sweep @ 430 MHz
Out
put p
ower
(dB
m)
−15 −10 −5 0 5 10 15 202
4
6
8
10
12D
rain
cur
rent
(A
)
(a) Power module 1.
−15 −10 −5 0 5 10 15 2025
30
35
40
45
50
Input power (dBm)
Power sweep @ 430 MHz
Out
put p
ower
(dB
m)
−15 −10 −5 0 5 10 15 202
4
6
8
10
12
Dra
in c
urre
nt (
A)
(b) Power module 2.
Figure 94. Output power measured as a function of input power. This is mea-sured at the center frequency of 435MHz. They are both biased withVDD=12.5V and VGG=5V.
power is increased. This means that for a system as the p-sounder, they are not veryuseful unless it is used near its saturation point. Within the bandwidth they deviateless than 0.7 dB. As Fig.91 indicates a 20-dB coupler is used, but it is not a perfect20 dB coupling over its bandwidth. This is shown in Fig.93. There has been correctedfor the coupler in the graphs.
Both modules reach a maximum output power of 48.3 dBm (67.7W). This cor-responds well with the datasheet. An important parameter is the 1-dB compressionpoint of the ampliers. This is measured by making a power sweep at the input andmeasure the output power. The 1-dB compression point is dened as the point wherethe ideal linear response and the measured response deviate by 1 dB. It can also bedened as the point where the amplier is leaving the linear region. The requirementsof the P-sounder system is to have a linear system, so it is very important to beoperating well below the compression point. Such a measurement was done for bothampliers and the result is shown in Fig.94.
The solid line in both graphs indicate the ideal linear relationship. The 1-dB com-pression point referred to the output is around 47 dBm for both ampliers. Anotherinteresting parameter is the drain current as a function of input power. This is shown
Thomas Sørensen Yassin 88 of 113

'Master thesis' August 31, 2006
340 360 380 400 420 440 460 480 500 520 5402
4
6
8
10
12
14
Frequency (MHz)
Dra
in c
urre
nt. (
A)
Input = −10 dBmInput = 0 dBmInput = +10 dBmInput = +17 dBm
(a) Power module 1.
340 360 380 400 420 440 460 480 500 520 5402
4
6
8
10
12
14
Frequency (MHz)
Dra
in c
urre
nt. (
A)
Input = −10 dBmInput = 0 dBmInput = +10 dBmInput = +17 dBm
(b) Power module 2.
Figure 95. Drain current measured at dierent input power levels. They are bothbiased with VDD=12.5V and VGG=5V.
340 360 380 400 420 440 460 480 500 520 5400
10
20
30
40
50
60
Frequency (MHz)
Dra
in e
ffici
ency
(%
)
Input = −10 dBmInput = 0 dBmInput = +10 dBmInput = +17 dBm
(a) Power module 1.
340 360 380 400 420 440 460 480 500 520 5400
10
20
30
40
50
60
Frequency (MHz)
Dra
in e
ffici
ency
(%
)
Input = −10 dBmInput = 0 dBmInput = +10 dBmInput = +17 dBm
(b) Power module 2.
Figure 96. Drain eciency measured at dierent input power levels. They are bothbiased with VDD=12.5V and VGG=5V.
in Fig.95. This is one of the drawbacks with this module. The current is reachinga maximum of 14A and although this is possible to supply it is not easy to handle.This is why it would be better to have a module with a drain voltage of 28V. TheP-sounder will transmit pulses with a maximum duty cycle of 50%, so the eectivedrain current will be halved. If the duty cycle is lower the large current will not becritical.
These power modules are operating in class A and with no input power, they havea drain current of 3.2A, meaning that they dissipate 40W. Therefore the maximumtheoretical eciency for this type of class is 50%. The measured eciency for bothmodules are shown in Fig.96.
The eciency is seen to around 45% as expected, this is also specied in thedatasheet. It only achieves this eciency at the region of saturation. The last inter-esting feature to be measured are the input and output return loss. The input returnis easily measured using a setup a shown in Fig.97. However the output return lossrequires some thought. It can be quite dicult as we have to apply a frequency tone
Thomas Sørensen Yassin 89 of 113

'Master thesis' August 31, 2006
Figure 97. Test setup to measure the input return loss.
340 360 380 400 420 440 460 480 500 520 540−15
−14
−13
−12
−11
−10
−9
−8
Frequency (MHz)
Mag
. (dB
)
Input = −10 dBmInput = 0 dBmInput = +10 dBmInput = +17 dBm
(a) Return loss of Power module 1.
340 360 380 400 420 440 460 480 500 520 540−14
−13.5
−13
−12.5
−12
−11.5
−11
−10.5
−10
−9.5
−9
Frequency (MHz)
Mag
. (dB
)
Input = −10 dBmInput = 0 dBmInput = +10 dBmInput = +17 dBm
(b) Return loss of Power module 2.
Figure 98. Return of the two power modules at dierent power levels. They areboth biased with VDD=12.5V and VGG=5V.
to the output port while it is transmitting. The tricky part is now to separate the twosignals especially if the two tones are the same frequency. Depending on the phaseof the two signals they could add or subtract. One possible solution could be to usetwo dierent frequencies, but then the question is which frequency is specifying theoutput return loss. Due to these considerations and time restraints, this measurementwas not completed. It is also noted that the output return loss is not given in thedatasheet. The result for the measured input return loss is shown in Fig.98. Thisshows that the module has an average of approximately -12 dB return loss. It is no-ticeable how the return loss decrease as the input power is raised.As mentioned, the frequency response becomes more at as the power is increasedtowards the saturation point. This could become a problem. Having the modules inparallel, lower the possibility of saturation, but at the expense of gain atness, whichmakes the modules less ideal when operating in parallel.
The previous results show that this module is capable of providing more thanenough power to fulll the requirements for the P-sounder system. However the band-width of the module might not be sucient for the real system. Especially the outputpower might not be at enough to implemented in the real system. The accuracyof the measurements are of course dependent on numerous things like the precisionof the spectrum analyser and output from the signal generator which has a limitedaccuracy. But the measurements show a great deal of resemblance to the datasheet.The dierence between two modules is expected and a correction can be made in thecalibration process.
Thomas Sørensen Yassin 90 of 113

'Master thesis' August 31, 2006
(a) Output with a 100Hz square signal. (b) Output with a 1KHz square gate signal.
Figure 99. Output of oscilloscope with a square wave at the gate terminal.
(a) Zoom in on the beginning of pulse. (b) Zoom in on the end of pulse.
Figure 100. Close up of Fig.99
Transient measurement The power module is used in a pulsed operation. Thereare two possibilities: either turn the module ON and OFF between pulses or leave itON all the time. For the module in question, the eciency is very bad and it dissipatesa lot of power. By attaching 12.5V to the drain and applying a square generator tothe gate, the output signal was measured with a oscilloscope. The oscilloscope isfrom Tektronix and is called TDS 684B. Two square waves with frequencies of 100Hzand 1KHz were used, each with an amplitude of 5V and a duty cycle of 50%. Ainput signal of -10 dBm at 430MHz was applied to the power module. The 1KHz and100Hz tones gave an output as shown in Fig.99.
The 100Hz tone shows very clearly how the output turns ON and OFF. Thetime it takes for it to settle is shown in Fig.100, where there has been zoomed in onthe beginning and ending of the pulse. Using a 1KHz tone proves, that the moduleis having trouble following and never becomes stable before turning OFF. If it isconsidered that pulses of 33 ns have to be generated, it will obviously not be able tofollow.
Thomas Sørensen Yassin 91 of 113

'Master thesis' August 31, 2006
(a) S-parameters of the LNA. (b) Noise gure of LNA.
Figure 101. Measured data for the LNA of the P-sounder system.
13.2 Low Noise AmplierThe LNA for the P-sounder system is a commercial component from Richard-
son Electronics. The specications are: wide bandwidth, a gain of 21 dB across thebandwidth and a noise gure between 0.5-0.65 dB, which is a really low gure. Thesupply should be 12V with a resulting current of 60mA. The data has been veriedby measurements as shown in Fig.101.
The return loss on both ports is also below 15 dB across the whole bandwidth.The measurement showed a 1dB compression point at an input power of -2.8 dBm,which match the specications well.
13.3 Complete system testThe nal test of the developed complete front-end is carried out by two tests. To
make a complete realistic measurement setup would be to complicated at this pointconsidering timing of signals and some the necessary equipment is not available atthis time(DFE, DSG). This test is to demonstrate the functionality of the system andto show that each component works as specied. A test description is given belowand the test setup is shown in Fig.102:
1. The rst test is to demonstrate that the antenna is functioning. By closing (Sw1) and connecting the circulator to the spectrum analyser through (Sw 2). Areecting plane is used to generate a signal to be read by the spectrum analyser.
2. A second test is also done where the (Sw 1) is closed and the circulator isconnected to the LNA through (Sw 2). The output of the LNA is read by thespectrum analyser. To make sure that no other signals are interfering duringthe measurements, a single measurement is done with no signals applied to theantenna. It showed that only noise was received.
The signal power generated should be around 50W CW. At this point, the powerlevel is already very high and the real system power will be somewhat lower due tothe pulsed nature of the system. But it is a good way of testing the antenna and allthe system components together, especially regarding reections. Also with a dutycycle of 40%, we come very close to CW operation. The frequency will be 430MHz.First the two power modules, were combined with the wilkinson dividers. This proved
Thomas Sørensen Yassin 92 of 113

'Master thesis' August 31, 2006
HPA
Signal generator
Spectrum analyzer
LNA
Attenuator 20 dB
Attenuator 20 dB
Spectrum analyzer
Sw 2
Sw 1
Figure 102. Test setup of the complete system test.
to be working with no problems at this power level. Unfortunately was the powermodules broken just before the complete system test. It was not possible to generatethe wanted power level as no other power ampliers were available. The maximumpower could only be reached with the signal generator and this can deliver around20 dBm.One thing that complicates the measurements, are the isolation of 21 dB for the circu-lator. Is is necessary to make sure that the received signal is larger than the coupledsignal from the circulator. The reecting plane should be very close to the antenna.
13.3.1 Complete test resultsThe test is made by the designed high power switch. The circulator is from Valvo
and the LNA is from Comm-connect, both discussed in chapter 8. The Cavity antennais chosen for the measurement as well. The second switch (Sw 2) is a mechanical switchfrom Sivers. The switch has an insertion loss of 0.18 dB and a isolation of 75 dB overthe entire bandwidth.
The input power to the system is 0 dBm. First the LNA is disconnected by (Sw2). With no reection the measured power is -47.3 dBm. The measured power is alittle lower than expected as the isolator and attenuator give a total attenuation of41 dB. It is also a way to test the return loss of the antenna. The antenna proved tobe operating ne, because the measured power was so small. The power measuredby the spectrum analyser can be seen to consist of the direct signal reected by theantenna, noise received by the antenna and the signal going through the circulator.The signals could add or subtract, depending on phase. This could be the reasonwhy the signal is lower. A metal plate held approximate 50 cm from the antennais expected to raise the received power. This was also the case and -32.2 dBm wasmeasured. It is dicult to distinguish between the signal going out from the antennaand reected back to the spectrum analyser and the signal going through circulatordirectly to the spectrum analyser. The two signals could either reinforce or reduce thetotal signal. By connecting the switch (Sw 2) to the LNA the received signals wereexpected to increase with the gain of the LNA. Again the power with no reectionwas measured and the received power was -26.6 dBm. With the metal plate placed infront of the antenna, the power was measured to -11.3 dBm. This shows very clearlythat the signals are amplied by 21 dB which is the gain of the LNA.This small system test showed the basic principles of the front-end. The test obviouslyneeds to be more complex using the complete bandwidth and a lot more power applied.The test was also done at the center frequency where many of the components arebest matched. Using the whole bandwidth would generate more reections.
Thomas Sørensen Yassin 93 of 113

'Master thesis' August 31, 2006
13.4 summaryThe power modules from Mitsubishi proved to correspond well to that specied
in the datasheets. Two modules were tested and they showed similar characteristicsregarding output power, but dierences when it came to the drain current. But thiscan be expected as modules change from batch to batch. An attempt to modulate thegate voltage showed that the module would have problems if it had to be turned ONand OFF between pulses. The LNA delivered what was specied in terms of gain andNF. The overall system test showed the principle of the front-end, that it was able totransmit and receive.
Thomas Sørensen Yassin 94 of 113

'Master thesis' August 31, 2006
14 ConclusionThe purpose of of the project project was the design and assembly of one front-end
module for the P-Band Ice Sounding Radar. The general description of a front-endwas given and dierent architectures were treated. The advantages and disadvantageswere considered for one T/R module and several T/R modules. It was considered anadvantage to have several T/R modules compared to only one, since this gave someadvantages like better eciency and easy integration. Also it is easier to build, asit sets lower requirements on its components. The main disadvantage was the cali-bration procedure which was possible but required a substantial amount of additionalhardware and processing. A survey of components was done and it was concluded thatit was dicult to obtain COTS components. Either these were not in the frequencyrange for the P-sounder or were unable to handle the power.
The thesis dealt with tests of a power module from Mitsubishi and several couplerswere designed and implemented. Also the characterization of a suitable PIN diodewas made, for the design of a high power switch. The switch was also veried bymeasurement. The two antennas for the P-sounder were almost fully designed by thestart of the project. They only needed small adjustments to be able to physicallyimplement these and integrate them with the rest of the circuitry. The antennas weremeasured and one of them proved to be very useful, while the other deviated to muchfrom the simulated result. The impedance bandwidth of both antennas were <15 dBover a 20% bandwidth which was excellent. The beam of the Cavity antenna wastilted slightly, which was predicted by the simulation. This was caused by the sur-rounding ground-plane of the antenna.
It was shown that power dividers and couplers can be made very compact withlumped components and still handle large amounts of power. The frequency responseof the wilkinson divider was shown to be very good and with an insertion loss ofonly 0.3 dB in the frequency band. The amplitude and phase dierence between theoutputs were very good, below 0.1 dB and less than 1 respectively. The amplituderesponse was also very at and deviated less than 0.1 dB. The 180 hybrid also provedto give good results as well. It had higher insertion loss of some 0.4 dB, which wasexpected by the use of more components and more complex layout. The amplitudeunbalance was also higher and the phase dierence was 174 at the center frequency.A new design using the wilkinson divider oered a huge improvement. It achieved avery at phase response with an almost perfect 180 phase dierence across the wholebandwidth. The amplitude balance was also improved with only a slight mismatchat the upper frequency limit. The high power switch was also designed and it had amaximum insertion loss of 0.7 dB. The amplitude variation over the bandwidth wasless than 0.2 dB and had a good isolation of almost 45 dB. It was found that thelayout of all the designs were very important to incorporate in the simulations. Thisproved to make a huge dierence. The bandwidth requirements was the most dicultthing to fulll, for all the above mentioned circuits. Some of these could still needsome additional modication. It can be concluded that the developed componentsgave some very good results, but small modications could be necessary regardingamplitude balance and bandwidth. The assembly of all the components for the front-end were done. This included: HPA, power divider/combiner, switch, circulator andswitch. The test ended up in a nal nal measurement, which showed the functionalityof the front-end.
Thomas Sørensen Yassin 95 of 113

'Master thesis' August 31, 2006
There are plenty of work to be done to complete the whole system. First of allthe inuence of temperature is very important. To test the components in its operat-ing environment should be carried out in the future. The nal system test was verybasic, but showed the principles of the front-end and that it worked satisfactorily. Acomplete test with the components to make the front-end and all the control elec-tronics for the switches, should be interesting. The inclusion of a calibration methodwould also be very interesting. The measurement should include sucient power andbe tested with dierent duty cycles to test the equipment under realistic operation.It is also believed that a more suitable PIN diode can be found which would makethe switch faster. There is also the need for analysis whether it is sucient to haveonly two A/D converters for the complete system with eight channels or if this willdeteriorate the system performance.
The thesis can conclude that a front-end was developed. The components whichwere unavailable were designed and tested. The idea of having several T/R modulesis denitely an advantage as it makes the component selection/design easier.
Thomas Sørensen Yassin 96 of 113

'Master thesis' August 31, 2006
References[1] B. R. Velado, Radio echo sounding of antarctica using spacevorne p-band radar,
2004.
[2] N. Chamberlain, C. Andricos, A. Berkun, K. Kumley, V. Krimskiy, R. Hodges,and S. Spitz, T/r module development for large aperture l-band phased array,Aerospace, 2005 IEEE Conference, pp. 111, 2005.
[3] E. Christensen, N. Skou, J. Dall, K. Woelders, J. Jorgensen, J. Granholm, andS. Madsen, Emisar: an absolutely calibrated polarimetric l- and c-band sar,Geoscience and Remote Sensing, IEEE Transactions on, vol. 36, no. 6, pp. 18521865, 1998.
[4] M. Schwerdt, D. Hounam, J.-L. Alvarez-Peres, and T. Molkenthin, The cali-bration concept of terrasar-x: A multiple-mode, high-resolution sar, CanadianJournal of Remote Sensing, vol. 31, no. 1, pp. 3036, 2005.
[5] J. Vidkjær, Class Notes, 31415 RF-Communication Circuits Autumn 2005, Chap-ter V POWER and NONLINEAR RF-AMPLIFIERS. DTU, 2005.
[6] S. C. Cripps, Advanced Techniques in RF Power Amplier Design. Artech HousePublishers, 2002.
[7] D. M. Pozar, Microwave Engineering. John Wiley & Sons, 1998.
[8] H. Packard, Application of PIN Diodes. Hewlett Packard.
[9] Microsemi-Watertown, The Pin Diode Circuit Designer's Handbook. MicrosemiCorporation, 1998.
[10] G. Mayhew-Ridgers, Developement And Modelling Of New Wideband MicrostripPatch Antennas With Capacitive Feed Probes. PhD thesis, University of Pretoria,2004.
[11] J. Dall, P-band ice sounding radar demonstartor development, 2005.
[12] A. Herique, W. Kofman, P. Bauer, F. Remy, and L. Phalippou, A spaceborneground penetrating radar: Mimosa, Geoscience and Remote Sensing Symposium,1999. IGARSS '99 Proceedings. IEEE 1999 International, vol. 1, pp. 473 475vol.1, 1999.
[13] J. P. Lab, A combined spatial- and frequency-domain interferometer for sea icethickness measurement..
[14] P-band ice sounding radar, ESA, 2005.
[15] U. Hackenberg, M. Adolph, H. Dreher, K. Ott, R. Reber, R. Rieger, andB. Schweizer, Polarisation agile, highly accurate t/r-module for synthetic aper-ture radar, Microwave Conference, 2003. 33rd European, vol. 2, pp. 875878,2003.
[16] K. Fujii, Y. Hara, Y. Shibuya, T. Sakai, and Y. Takano, A highly integrated t/rmodule for active phased array antennas, Radio Frequency Integrated Circuits(RFIC) Symposium, 1998 IEEE, pp. 77 80, 1998.
Thomas Sørensen Yassin 97 of 113

'Master thesis' August 31, 2006
[17] J. Lemette, C. Salmer, T. Schott, and P. Eudeline, New generation of s band t/rmodule, Radar Conference, 1999. The Record of the 1999 IEEE, pp. 187 190,1999.
[18] Y.-B. Jung, S.-Y. Eom, S.-I. Jeon, J.-I. Choi, and H.-K. Park, The design of t/rmodule for x-band apaa system used in satellite communications, MicrowaveSymposium Digest, 2002 IEEE MTT-S International, pp. 13371340 vol.2, 2002.
[19] M. Ludwig, H.-P. Feldle, and H. Ott, A miniaturised x-band t/r-module forsar-systems based on active phased array techniques, Geoscience and RemoteSensing Symposium, 1995. IGARSS '95. 'Quantitative Remote Sensing for Sci-ence and Applications', International, vol. 3, pp. 2063 2065 vol.3, 1995.
[20] P. Snoeij, P. Koomen, P. Hoogeboom, and H. Pouwels, C-band solid statedual polarization t/r modules for airborne sar applications, Geoscience and Re-mote Sensing Symposium, 1994. IGARSS '94. Surface and Atmospheric RemoteSensing: Technologies, Data Analysis and Interpretation., International, vol. 3,pp. 1365 1367 vol.3, 1994.
[21] J. Ashe, W. Yang, T. Shen, G. Xu, and S. Silverstein, Experimental study ofremote calibration algorithms for active phased array transmitters, ConferenceRecord of the Asilomar Conference on Signals, Systems & Computers, vol. 1,pp. 709712, 1997.
[22] M. Lanne and P. Drackner, T/r-module mismatch and antenna pattern char-acteristics, Phased Array Systems and Technology, 2003., IEEE InternationalSymposium on, pp. 229234, 2003.
[23] W. Johnson, R. Jordan, and A. Safaeinili, The europa orbiter radar sounder:innovative radar design for a challenging mission, Aerospace Conference Pro-ceedings, 2002. IEEE, vol. 1, pp. 1194 vol.1, 2002.
[24] T. Suitz, K. Okamoto, H. Maeno, and S. Uratsuka, Development of a highresolution ice echo sounder for arctic ice sheet, Geoscience and Remote Sens-ing Symposium, 1994. IGARSS '94. Surface and Atmospheric Remote Sensing:Technologies, Data Analysis and Interpretation., International, vol. 4, pp. 24012402 vol.4, 1994.
[25] A. Moussessian, R. Jordan, E. Rodriguez, A. Safaeinili, T. Akins, W. Edelstein,Y. Kim, and S. Gogineni, A new coherent radar for ice sounding in greenland,Geoscience and Remote Sensing Symposiun, 2000. Proceedings. IGARSS 2000.IEEE 2000 International, vol. 2, pp. 484 486 vol.2, 2000.
[26] A. Kuchikulla, S. Gogineni, P. Kanagaratnam, and T. Akins, A wideband radardepth sounder for measuring the thickness of glacial ice, Geoscience and RemoteSensing Symposium, 2004. IGARSS '04. Proceedings. 2004 IEEE International,2004.
[27] Motorola, Datasheet for the mrf1670t1 power module..
[28] T. Hirota, A. Minakawa, and M. Muraguchi, Reduced-size branch-line and rat-race hybrids for uniplanar mmic's, Microwave Theory and Techniques, IEEETransactions on, vol. 38, no. 3, pp. 270 275, 1990.
Thomas Sørensen Yassin 98 of 113

'Master thesis' August 31, 2006
[29] M. Scardelletti, G. Ponchak, and T. Weller, Miniaturized wilkinson power di-viders utilizing capacitive loading, Microwave and Wireless Components Letters,IEEE, vol. 12, no. 1, pp. 68, 2002.
[30] M. Chongcheawchamnan, N. Siripon, and I. Robertson, Design and performanceof improved lumped-distributed wilkinson divider topology, Electronics Letters,vol. 37, no. 8, pp. 501 503, 2001.
[31] L.-H. Lu, Y.-T. Liao, and C.-R. Wu, A miniaturized wilkinson power dividerwith cmos active inductors, Microwave and Wireless Components Letters, IEEE,vol. 15, no. 11, pp. 775777, 2005.
[32] L.-H. Lu, P. Bhattacharya, L. Katehi, and G. Ponchak, X-band and k-bandlumped wilkinson power dividers with a micromachined technology, MicrowaveSymposium Digest. 2000 IEEE MTT-S International, vol. 1, pp. 287 290 vol.1,2000.
[33] I.-H. Kang and J.-S. Park, A reduced-size power divider using the coupledline equivalent to a lumped inductor, Microwave Journal, vol. 46, no. 7,pp. 72+74+76+7879, 2003.
[34] S. Parisi, 180 degrees lumped element hybrid, Microwave Symposium Digest,1989., IEEE MTT-S International, pp. 1243 1246 vol.3, 1989.
[35] C. Ng, M. Chongcheawchamnan, and I. Robertson, Lumped-distributed hybridsin 3d-mmic technology, Microwaves, Antennas and Propagation, IEE Proceed-ings -, vol. 151, no. 4, pp. 370374, 2004.
[36] M. Antoniades and G. Eleftheriades, A broadband wilkinson balun using mi-crostrip metamaterial lines, IEEE Antennas and Wireless Propagation Letters,vol. 4, no. 1, pp. 209212, 2005.
[37] H. Nagi, Miniature lumped element 180/spl deg/ wilkinson divider, MicrowaveSymposium Digest, 2003 IEEE MTT-S International, vol. 1, pp. 5558 vol.1,2003.
[38] A. Koudymov, X. Hu, K. Simin, G. Simin, M. Ali, J. Yang, and M. Khan,Low-loss high power rf switching using multinger algan/gan moshfets, IEEEElectron Device Letters, vol. 23, no. 8, pp. 449 451, 2002.
[39] J. Shealy, J. Smart, M. Poulton, R. Sadler, D. Grider, S. Gibb, B. Hosse, B. Sousa,D. Halchin, V. Steel, P. Garber, P. Wilkerson, B. Zaro, J. Dick, T. Mercier,J. Bonaker, M. Hamilton, C. Greer, and M. Isenhour, Gallium nitride (gan)hemt's: progress and potential for commercial applications, Gallium ArsenideIntegrated Circuit (GaAs IC) Symposium, 2002. 24th Annual Technical Digest,pp. 243246, 2002.
[40] J. Walston, Spice circuit yields recipe for pin diode, Microwaves & RF,vol. 31, no. 11, pp. 78, 82, 85, 87, 89, 1992.
[41] J. Huang, Z. Hussein, and A. Petros, A wide-band dual-polarized vhf mi-crostrip antenna for global /sup s/ensing of sea ice thickness, NONAME, vol. 2B,pp. 684687 vol. 2B, 2005.
Thomas Sørensen Yassin 99 of 113

'Master thesis' August 31, 2006
[42] R. Zahn, Innovative technologies for space-based radars, Radar, Sonar andNavigation, IEE Proceedings -, vol. 150, no. 3, pp. 104112, 2003.
[43] W. Edelstein, C. Andricos, and A. Moussessian, High-eciency l-band trans-mit/receive module for synthetic aperture radar, Radar, 2003. Proceedings. 2003IEEE Conference on, pp. 238243, 2003.
[44] W. Wojtasiak, D. Gryglewski, T. Morawsk, and E. Sedek, Desining t/r mod-ule for active phased array radar, Microwaves, Radar and Wireless Communi-cations, 2002. MIKON-2002. 14th International Conference on, vol. 2, p. 631,2002.
Thomas Sørensen Yassin 100 of 113

'Master thesis' August 31, 2006
A Summery of T/R modules
Article Frequency Output power Technology PRF Pulse width NF Bandwidth Weight Tx/Rx gain[42] 9.6GHz 7W peak - 3KHz 25-50µs <3.6 dB ≥150MHz - 25/15-30 dB[2] 1.26GHz 2.4W peak SMD, MMIC 0.35-4KHz 5-7µs <4.4 dB 200MHz 32 g 39/24 dB[43] 1.25GHz 30W peak MMIC/SMD 2KHz 50µs <2.5 dB 80MHz <100 g 48/25 dB[13] 137/162MHz 100W SMD 0.7KHz 2.22µs 4.5 dB 20MHz - /39-70 dB[15] 9.5-9.8GHz 6.3W LTCC/MMIC - - <4.5 dB - 15 g 27/28 dB[20] 5.3GHz 20W peak - 4KHz 12.8µs - 40MHz - 55 dB/[44] 5.3-5.9GHz 4W - 5KHz 30µs ≤3 dB - - 32/25 dB[19] 9GHz 4W MMIC/ASIC - - 3.9 dB 2GHz 67 g /28 dB
Table 24. Data for dierent architectures.
B Power device
BBM3C3KK4:http://www.empowerrf.com/pdfs/1062.pdf45H4047M:http://www.mitsubishichips.com/Global/content/product/hf/sirfpowermod/uhf300-500mhigh/uhf300-500mhigh/ra45h4047m.pdfBGY85:http://www.semiconductors.philips.com/acrobat_download/datasheets/BGY84_85_4.pdfP10:http://www.crescendtech.com/pdf/08-P10%20Series%20UHF%20-%20C5%20Web.pdfSM04080-36HS:http://www.stealthmicrowave.com/specs/04080_36hs.pdfNB00415:http://www.nextec-rf.com/datasheet/NB00415_datasheet.htmlHMC-C012:http://www.hittite.com/product_info/product_specs/ampliers/hmc-c012.pdfBBM3C3KK4:http://www.empowerrf.com/pdfs/1062.pdfMRF1570T1:http://www.datasheetcatalog.com/datasheets_pdf/M/R/F/1/MRF1570T1.shtml
Table 25. Web links to power modules.
Thomas Sørensen Yassin 101 of 113

'Master thesis' August 31, 2006
C Mechanical drawings
Figure 103. Mechanical drawing of the power module box.
Thomas Sørensen Yassin 102 of 113

'Master thesis' August 31, 2006
Figure 104. Mechanical drawing of the power divider carrier. All holes are Ø2.
Thomas Sørensen Yassin 103 of 113

'Master thesis' August 31, 2006
D Distributed Rat-race coupler
Figure 105. Simulated and measured transfer response of distributed Rat-race cou-pler.
Thomas Sørensen Yassin 104 of 113

'Master thesis' August 31, 2006
Figure 106. Simulated and measured reection coecients of distributed Rat-racecoupler.
Figure 107. Amplitude dierence.
Figure 108. Phase dierence.
Thomas Sørensen Yassin 105 of 113

'Master thesis' August 31, 2006
Figure 109. Layout of distributed Rat-race coupler.
Thomas Sørensen Yassin 106 of 113

'Master thesis' August 31, 2006
E Layout Wilkinson divider
Figure 110. Layout of Wilkinson divider.
Figure 111. Photo of lumped wilkinson divider.
Thomas Sørensen Yassin 107 of 113

'Master thesis' August 31, 2006
F Layout lumped Rat-race and 180 wilkinson coupler
Figure 112. Layout of lumped Rat-race coupler.
Figure 113. Photo of 180 hybrid coupler.
Thomas Sørensen Yassin 108 of 113

'Master thesis' August 31, 2006
Figure 114. Layout of the 180 power divider.
Figure 115. Photo of the 180 wilkinson divider.
Thomas Sørensen Yassin 109 of 113

'Master thesis' August 31, 2006
G Layout Switch
Figure 116. Layout of switch.
Figure 117. Photo of switch.
Thomas Sørensen Yassin 110 of 113

'Master thesis' August 31, 2006
H Antenna test xture
Figure 118. Test xture for the Foam antenna.
Figure 119. Test xture for the Cavity antenna.
Thomas Sørensen Yassin 111 of 113

'Master thesis' August 31, 2006
Figure 120. Foam antenna.
Figure 121. Cavity antenna.
Thomas Sørensen Yassin 112 of 113

'Master thesis' August 31, 2006
I Transistor box
Figure 122. Drawing of transistor in its box.
Thomas Sørensen Yassin 113 of 113