Embed Size (px)
Citation preview

SPWL A 42nd Annual Logging Symposium, June 17-20, 2001
PRINCIPLES OF TENSOR INDUCTION WELL LOGGING IN A DEVIATED WELL IN A N ANISOTROPIC MEDIUM
Michael s. Zhdanov' W. David Kennedy, Arvidas B. Cher yauka , and Ertan P eksen Universit y of Utah and ExxonMobil Upstream Research Company
ABSTRACT
In th is pap er we develop an inte rp retation method for the characterization of conductivity anisot ropy in an earth formation, based on the tens or induction well logging (TIWL) technique. The method is based on examining the response of a tri-axial electromagnet ic induction logging instrument in a deviated well penet rating a transversely isot ropic medium. The foundations of the T IWL meth od were developed in Zhdanov et al . (2001), where the low frequency approximat ions for the quad rature components of the induction tensor were derived. In this paper we further examine the basic principles of tensor induct ion logging in two- , three-, and multi-layer ani sotropic form ation s in vertical and deviated wells using numerical simulation of tensor induction logs. We introduce a technique for correct reconstruction of the apparent conduct ivit ies of th e an isot ropic formations, based on applicat ion of a regularized Newto n method. The met hod is fast and prov ides a "real t ime" int erpretation. The practical effectiveness of this technique for tensor induct ion log int erp retat ion is illustrated using results of numerical experiments.
IN TRODUCTION
The ident ification of hydrocarbons and quantification of hydrocarbon pore volume in so-called "low resistivity pay" reservoirs has been a perennial prob lem for pet roph ysicists. More recently, the correct interpretation of resist ivity logs in highly deviated and horizontal wells has challenged the petrophysicist 's underst anding of resisti vity inst rument responses and reservoir resist ivity distribution, part icularly in anisot ropic reservoirs. New resistivity inst rumentation promises to mitigate or remove th ese difficulties.
We exa mine the response of a tri -axial electromagnetic indu ction logging instrument in a deviated well penetrating a transversely isotropi c med ium. The instrument responds to th ree mutually orthogonal components of magnetic field excited by each of three mutu ally orthogonal tr ansmit ters, the responses comprising a nine compo nent induction ten sor. Zhd anov et a l. (2001) der ived low frequency approx imations for the quadrature compo nents of the induction tensor by theoretically analyzing th is tri-axial induction instrument for its response to magnetic field compo nents induced in an infinite, homogeneous, anisot rop ic medium. The analysis
showed t hat the tensor components of conductivity and thei r orientation can be resolved from the quadrature components of the inst rument response, providing a basic tensor logging inst rument response interpretation. In this paper we further examine the basic principles of tensor induction logging in two-; three-, and multi-layer anisotropic formations in vertical and deviated wells using numerical simulat ions of tensor induction well logging (TIWL) data. We develop a technique for correct reconst ruction of the ap parent conduct ivities of the anisotropic formatio ns, based on applicatio n of a regularized Newto n meth od . We demonstrate the effectiveness of this technique for int erpretat ion of tensor induction log data in a deviated well in an an isot ropic medium. Th e metho d is fast and provides a "rea l t ime" interpretation.
PRINCIPLES OF T EN SOR INDU CTION W ELL LOGGING IN DE VIATED W ELLS
Deviated wells and dir ectional dr illing are important in the oil industry. The main objective of this work is to study the TIWL response in a deviated well.
TIWL is based on analyses of the response of a tri-axial electromagnetic induction instrument in an anisotropic conductive medium. This instrument detects three components of the magnetic field due to each of three transmitters for a total of nine signals that are conveniently displayed as the components of a matrix
H X ~ x H~ H;] R H = H~ H: H~ ,
[ H X z H¥ H:
where superscripts indicate th e tra nsmitt er components and subscripts represent the receiver components.
In the Car th esian system of coordinates (x ,y, z), with the z axis directed along the axis of symmetry of the transversely isotropic (TI) conductive medium , the conduct ivity tensor can be represented by the diagonal mat rix
Uh o Uh Ii =
[ ~ ~ ],
o Uv
where U h is the horizontal conductivity and U v is the vertical conducti vity.

SPWLA 42nd Annual Logging Symposium, June 17-20, 2001
In this case, t he expressions for the induction tensor comp onent s are writ ten as (Zhdanov et al., 2001)
i k u 2 2H X = e S [k;' + i khs - khkvx _ 2ikhX ] _
x 4Jr AS Sp2 p4
i k hT 2 e [i khr - k~x2 _ 2ikhx _ i kh + 4Jr rp2 p4 r2
2 2](k~ X2 + 1) + 3ikhx _ 3X , (1)
r3 r4 r5
ik u s H: = H%= x y e [ _ kvkh _ 2ikh]
4Jr p2 S p2
ik h T e [ k;' 2ikh k;' 3ikh 3 ] x y - - ---- + - +-- - (2) 4Jr rp2 p4 r3 r4 r5 '
i k h T e [ 3ikh 3 ] H X = H Z = - xz-- k2 + -- - - , (3)
Z x 4Jrr3 h r r2
i k u s 2ikhy2] HY = e [ k~ + ikh S - khkvy2 _ _
Y 4Jr AS sp2 p4
i k hT e [ikhr - k~y 2 _ 2ikhy2 _ i kh+ ~ rp2 p4 r2
3y2] ( k~ y2 + 1) + 3ikhy2 _ , (4) 4 5r3 r r
i k hT e [ 3ikh 3 ] (5)H%= H~ = -yz 4Jrr3 k~ + -r- - r2 '
i k h T H Z = e • [k2 + i kh (k~ Z2 + 1)
Z 4JrT h --:;:- - r2
2 23ikhz 3z ] (6) --3-+ - 4 ' r r
where the not ations p = J x2 + y2, S = Jp2 + .,\2z2 , .,\2 = onlo« . r = Jp2 + Z2, k~ = iWf.! (Jh, and k; = ioua; are used .
The magnetic field components are given in for mulae (1)- (6) in a coordinate syste m defined by the hor izontal and vertical princip al axes of the tran sverse isotropic media. In pra ctice , the orientation of the t ransmit te r and receiver coils will be arbit rary with respect to this coordinate syst em. In order to use t he repr esentation of the field tensor H for an instrument locat ed in an ar bit rary orientati on with respect to the tensor principal axes, it is necessary
to t ransform the transmit te r mom ent in the inst ru ment frame (denoted by (x' , s',Zl)) into the medium coordinates (denoted (z, y , z)). This t ransform ation can be made by applicat ion of a rotat ion matrix.
T he primed frame is related to the unprimed frame by two rotat ions about the origin . Fi rst , t hink of rotating z' around the y' axi s through an angle a unt il z' coincides with z . After this rotat ion the x-y and xl_y' planes are co-plan ar. A fur ther rotation around t he z (= z') ax is through an angle f3 br ings z and Xl and y and yl into coincidence. The act ion of t hese rotations on a vector is math emati cally represented by mult iplication of vectors in the primed fra me by a rotation matrix. T he product gives the components of the vector in the medium, or unprimed , frame.
The rotation matrix R, as we discussed ab ove, consists of two rotations
R=R",R~ ,
where R", describ es th e rotat ion around t he yl ax is
~ [ cos a 0 - sin o 1 R ", = 0 1 o ,
sin o 0 cos a
and R~ describes the rot ati on around the z (= Zl) axis thr ough an angle f3,
COS f3 sinf3
R~ = - s~nf3 cosf3 [ o •
The produ ct of these two rotation matrices is given by
~ ~ ~
R =R~R", =
[ooo aooo a cos c sin f3 - ~n " ]- sin f3 cos f3 o . (7)
sin acos f3 sin a sin f3 cos a
Represented in the coordinates defined by the condu ct ivity tensor principal axes, t he field is given in terms of it s sources by
H =HM. (8)
Denoting t he source moment by M = (Mx, M y, Mz)T when referring to the mediu m frame
and by M ' = (M~,M;,M~ ) T when referri ng to the
instrument frame, then t he coordinate rotation R transforms t he field coordinates from the medium
2

SPWLA 42nd Annual Loggin g Symposium, June 17-20, 2001
frame to the instrument fram e. For example, H' = RH and M ' = RM. Mult iplication of the lat ter example from the left by R-1 gives
M=R-1M/. (9)
Substitut ing (9) into (8), multiplying from the left by R and not ing that H' = U.H, gives
H' = MR-1 M /. (10)
This expresses the magnetic field in the instrument coordinate frame in terms of the source in the inst rument coord inate frame an d in terms of the magnet ic induction tensor explicitly expressed in the medium coordinate frame. We note t hat, with the definition
H' == RHR-1 =RHRT , (11)
the field equat ions in the inst rument frame have a form identical to the ir form in th e medium frame; i.e.,
H/=H/M', (12)
where H' is the representation of the induction ten sor in the instrument frame. The comp onents of H' are used in the est imation of receiver voltages.
APPARENT CONDUCTIVITIES BASED ON LOW FREQUE NCY ASYMPTOTICS
The analysis of the low frequency asymp totics of the expressions (1)-(6) helped develop the following formu lae for the low frequency "horizontal" apparent conduct ivity, (T~ a' apparent anisotropy coefficient , >.~ , and appar ent dip angle, Q~, calculations (Zhdanov et aI., 2001):
o 1 [ x' 1 z' aha = 2g ImHx ' + "2ImHz' +
o
(lmH;:- ~ ImH;:r +21m'H;:]' (13)
4 2 2 >. ~ = gO(Tha
ImH;: .
1 (14)
(ImH~: + ImH;: + ImH;: - 2g0(Tha) ,
and
o 1 . - 1 21m H z' x ' ] , (15) Q
a = "2 sm [ ImH;: + ImH;: - 3go (T~ a
where Im is the imaginary part of the mag netic field . H X' HY' H Z' d H X' thcompo nent, x' , Y' , z' an z' are e mag
netic field compo nents in the instrument coordi nate system; go is a constant given by
W j.lo
go = 87[L '
where W is the angular frequency, j.l o is the freespace magnetic permeability, and L is a transmitterreceiver separation.
The expression for the "vert ical" apparent conducti vity, aea, has the form
o (T~ a (16) <; = ( ,\~)2 '
For a vertically oriented tool, the expression for the apparent horizont al conducti vity coincides with th e tradit ional expression for the apparent condu ctivity in isotropic media,
o _ 47[L H ZO aha - - - Im z , (17)
W j.lo
which is called "conventional apparent conductivity" . In this special case, the expre ssion for the vertical appa rent conductivity calculation is (Zhdanov et al., 2001)
o _ 87[L I HXO av a - m x • (18)
W j.l o
In formulae (17) and (18), H;o and H; o are th e magnetic field compo nents for the vertically oriented tool. The exact formulae for these component s can R be obtained from the general expressions (6) and (1) by evaluating th e last formulae in the limit p -t O. In this case s -+ ,\L , r -t L , z = L, and
i k h L H ZO_ e
z - 27[£3 (1 - ikhL) , (19)
i k hL e [ 1 + >.2 ]H; o = - 47[£3 1 - ikhL - 2)!2khL2 . (20)
Thus, the TIWL method consists in measurin g the components of the magnetic induct ion tensor by a tri-axial induct ion instr ument and computing the apparent conductivities using formu lae (13) and
3

SPWLA 42nd Annual Logging Symposium, June 17-20,2001
(16) . T hese formulae are bas ed on the low frequency asymptotics of field com ponents (1)- (6). T herefore , these apparent cond uct ivities provide only an appr oximate estimate for the real conductivities of an isot rop ic media. In order to obtain more accurate parameter estimates for the medium, we can use a simple inversion scheme based on the exact expression of the ind uction tensor components . We discuss this technique in the next sect ion .
REGULARIZED N EW T ON M ET H OD FOR INTERPRETATION OF TIWL DATA
In this section, we develop a technique for calculating the tensor induction well logging apparent conductivities using the rigorous solutions for the homo geneous anisot rop ic media (1)-(6) . Our technique is based on inversion of the tensor induct ion log data for the par ameters of the equivalent homogeneous anisot ropic media using a regularized Newton method . We will illust rate this metho d for an arbit rary induct ion array orientation. The expressions for t he magnet ic field components in homogeneous anisotrop ic media in the instrument coordinate sys tem can be obtained from the corresponding formulae (1)-(6), developed in the medium coord inate sys te m, by application of the rotational t ransformation (ll).
The algorithm of the regu larized Newton met hod is described by Zhdanov (1993) . If n is t he iterati on index
f n = A (m n ) - d, (21)
l~n = IVn(m n) = F;;'nf n + IIn(m - m ap r ) ' (22)
H tnn = F;;'nF tnn + IIn I , (23)
m n+1 = rn ., - H;;, )~n (24)
where A is a nonlinear operator of the forward modeling described by formulae (1)- (6) and (12) ; d is a vector of observed dat a , rn ., is a vector of model parameters (horizont al and vertical conductivit ies, U h
and uv , and the dip angle a) on the n-th iterat ion , m ap r is the a priori model, r is a residual vector of the difference between the predicted , A (mn ) , an d obse rved data ; F Inn is a Frechet derivative matrix; H ;;'n = (F:n F tnn) -I is a quasi Hessian matrix; I ~n
n
is the regulari zed direction of a Newton met hod on the n-th iteration (Zhdanov, 1993).
The regu larization parameter II is updated on each iterati on according to a progression of numbers
Ilk = 1I0q \ k = 0, 1, 2, ..., n; (25)
where coefficient q determines the rate of decreasing Ilk : 0 < q < 1. T he first it eration of the Newton method is run with II = O. T he initial value of the regularization parameter , 110 , is determined after t he first iterati on, m, as the rat io
IIA (m l ) - d ll2
110 = 2 • IIml - m apr ll
For any number Ilk we calcu late the misfit II A (m V k ) - d 11 2 . The opt imal value of th e parameter II is the number IIk O, for which we have sat isfied the misfit condition,
II A (m Vk O ) - d 11 2 = <5, (26)
where <5 is t he level of noise in the observed data . There are three unknown model par ameters; i.e.,
the dip angle a and the horizontal and vert ical conductivit ies, Uh and U v ' T herefore, the Frechet deri vative matrix can be calculated directly by taking derivat ives of expressions (1)- (6) and (12), with respect to unknown parameters. T he matrix is
eu-, 8 H:X; en-; -L.. -L.. -L.. &Uk &u. &0
8 H Z: 8 H;z;: 8 H Z
:
---<..... ---<..... ---<..... aUk, oUv , &0F= I (27)
&H ' , &H ' , &H ' ; I · - - y- --y- --ll.... &Uk Bo; &0
&W ; 8H;: 8 H Z:
---<..... au~ &u. &0
In the Newton algorithm the calculations start with an initial guess, which is usually set equal to the a priori mod el, rn a = m ap r , and then update it on each iterat ion according to (24). The method is fast and usually converges after 4- to-6 iterat ions.
T he correct choice of the initial guess is vital for the Newton met hod. If t he algor ithm starts with the init ial guesses , t hat are "far" from the tru e soluti on, t he Newton method may not converge . Fortunately, in our case, we select a starting model t hat is often very close to the t rue solut ions . The initial model parameters are based on the low frequency appare nt conductivit ies , u~a an d uea , and apparent anisotropy coefficient >.~ , int rodu ced ab ove by expressions (13), (16), and (14).
The regulari zed Newto n routine solves for three parameters at each TIWL obser vat ion point. T hese parameters are the hor izontal and vert ical conduct ivit ies, and t he dip angle.
NUM ER ICAL EXAMPLES
In the model st udy, we examined the bas ic principles of the TIWL method using nu merical simula
4

SPWLA 42nd Annual Logging Symposium, June 17-20, 2001
t ion. We considered the simplest case of a layered model of rock form at ion without a borehole and invaded zones. The tensor ind uctio n t ool has three mutually orthogonal t ra nsmitters and t hree mutually orthogonal receivers, with the "vert ical" tr ansmitter and receiver oriented along th e deviated bor ehole. The distance between t he transmitter 's position and the receiver' s position was 1.0 m. The calculations were performed for a tool moving along a borehole, sam pled every 0.25 m. The operating frequency was 20 kHz.
The synthet ic data were computed using a library of 3-D Green 's tensors in layered anisot ropic format ions (Cheryauka and Zhdanov, 2001a). The forward response for a layered model can be calculated using Green' s funct ions. After comput ing the Green 's te nsor components, t he magnetic fields may be found as
H = iwp OG H , (28)
where GH is the Green's tensor for a layered model
x x
- [ Y Gt G~ .
GX GY GZ]~ x G H - GX
GX Z G~ G;
Th e respo nse of t he layered anisot ropic model was calculated in the model coordinate syst em. The result th en was transformed from the model frame to th e instrument frame, using a rot ation matrix.
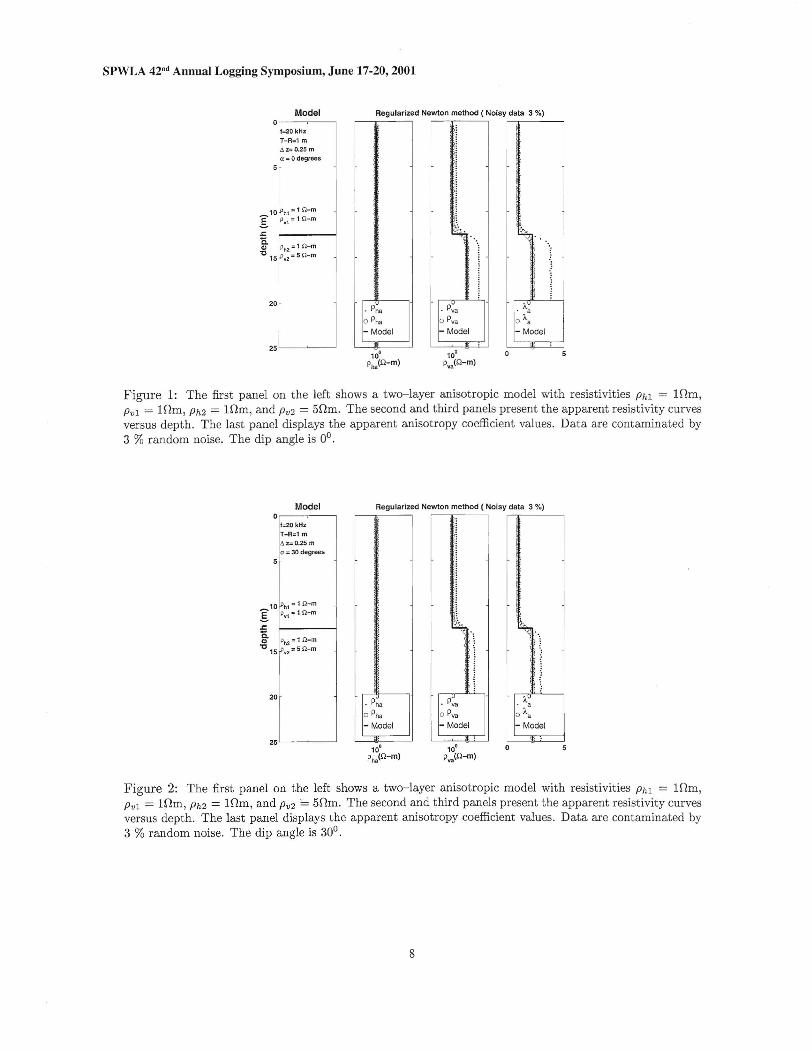
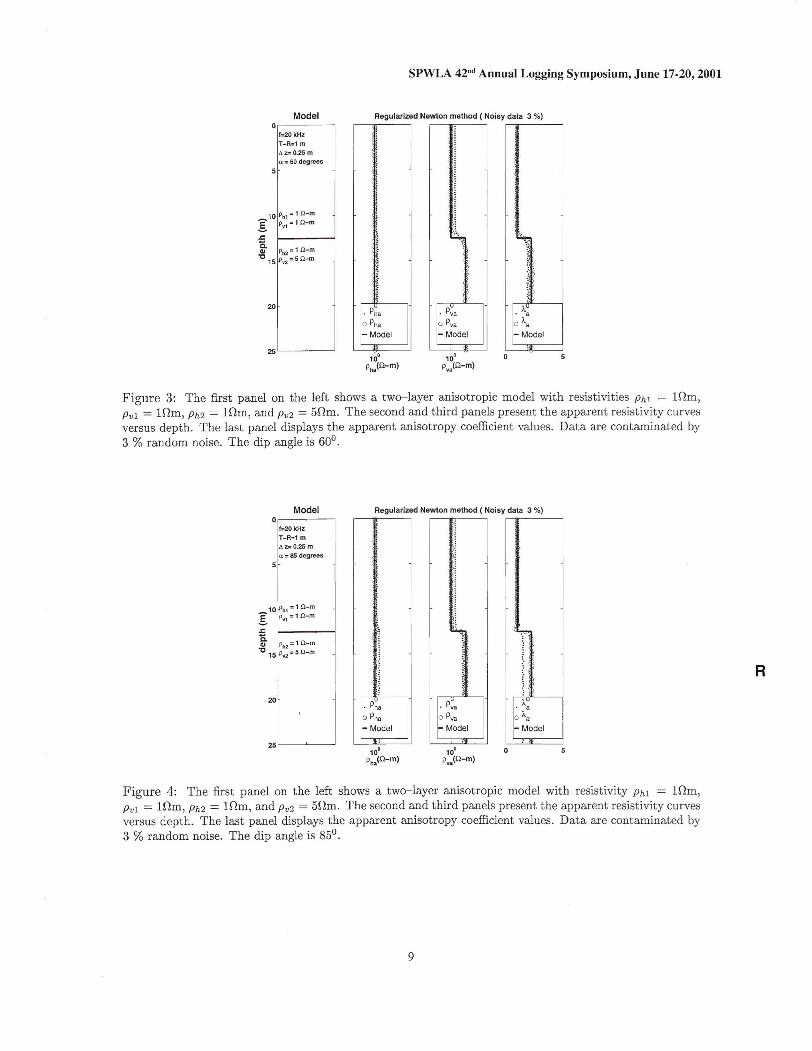
Two-layer model with a dip angle We assume tha t tensor ind uct ion logging is conducted by a tool coaxial with a borehole. We calculate the model responses (indu ction tensor components) for th e different positions ofthe tool along the bor ehole. Using these responses as th e synthetic data, we compute th e low frequency (O"~ a and O" ~ a) apparent conductivities according to formulae (13) and (16) as an init ial model. Then more accurate est imations of the ap parent conductivit ies, O"ha and £Iva, were computed using th e Newton inversion , as described in the previous sect ion. The results were plotted as ap parent resistivity curves, P~a ' P~a ' Pha, and pva, versus depth for a different dip angle a, equal to 0, 30, 60, and 85 degrees, respectively (Figure s 1- 4).
Each of the Figures (1-4) has four panels. The first panel on t he left shows the parameters of the two layer model. The second two panels present the apparent resistivity curves versus depth. The last panel displays th e apparent anisot ropy coefficient values versus depth. The solid lines show th e true parameters of the model. The apparent resist ivit ies
and anisot ropy coefficient, P~a ' P~a , and A~, obtained by the low frequency asymptotics, are shown by the dotted lines. The circles represent the invert ed apparent resistivit ies and anisotro py coefficient , Pha, Pva, and Aa·
The data were contaminated by 3% random Gaussian noise at each observat ion point . One can see th at th e low frequency asymptotics overestimates th e vertical resistivities and t he anisot ropy coefficient for dip angle values below 45 degrees. At a equal to 60 degrees, t he ap parent parameters are surprisingly close to the t rue model. At the larger dip angle (a =85 degrees) the low frequency asymptoties underest imat e th e vert ical resistivities and th e anisotropy coefficient . At the same t ime, the appar ent par ameters inverted by use of th e regulari zed Newton method are very close to th e true parameters of the model for any dip angle (the curves shown by circles in Figures 1-4).
Note th at in this model, with the convent ional induction tool, we can obtain only one apparent conductivi ty, which reflects the integrated effect of both vertical an d horizont al conduct ivit ies.
The boun dary cannot be seen by using only th e apparent resistivity expression for Pha (Figure 1). But the vert ical apparent resistiv ity clearly responds to the position of th e boundary. The Pva curve changes sharp ly when the tool reaches the boundary. Thi s model provides a simple illust ration of an important addit ional power of tensor induction well logging in anisot ropic formation in comp arison with the t radit ional induction logging tool.
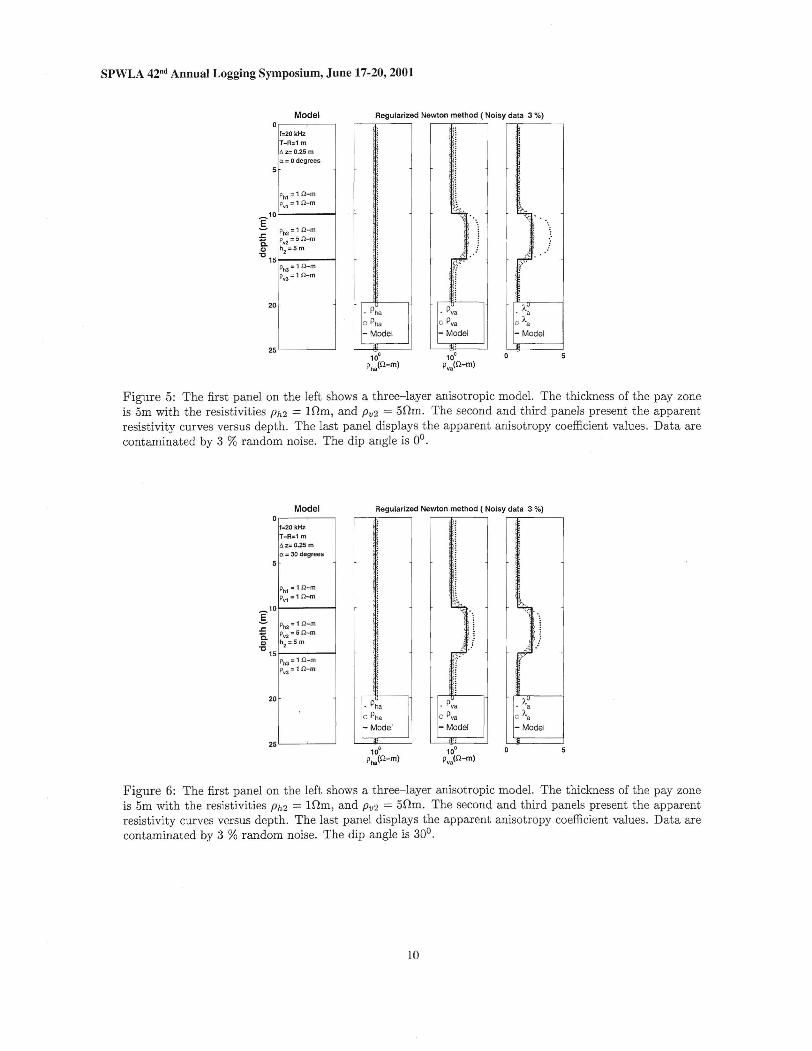
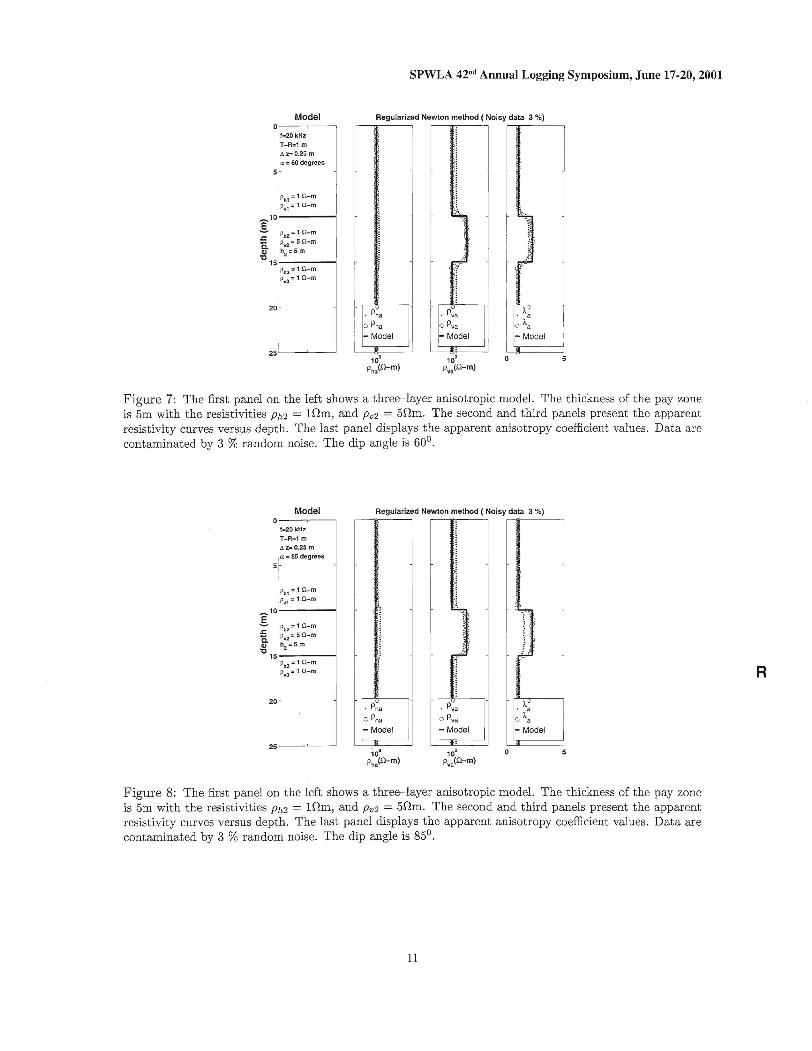
Three-layer model with a dip angle In the next set of numerical simulations, we consider a mode l of a three-layer formation. Figur e 5 shows the model on the left panel. Thi s model is a very good example of a practical situation where convent ional induct ion logging can miss a geological structure . The layer th ickness is 5m. There is no hor izontal conduct ivity variat ion in t his model, while the vertical conduct ivity of the second layer is different from th e top and bottom layers. On the second panel from the left , representing the horizontal apparent resistivi ties, we cannot see any indication of the second layer. However , it is possible to determine the layer boundari es by using vert ical resistivity informat ion (the third panel from t he left ). The last panel displays the ani sotropy coefficient values versus depth.
The synthet ic data simulated for th is model were contaminated by 3% random Gau ssian noise. The solid lines show the true parameters of the model.
R
5

SPWLA 42nd Annual Logging Symposium, June 17-20,2001
The apparent resistivities and an isotropy coefficient , P~a ' P~a ' and A~ , obtained by low frequency asymptoties, are shown by th e dotted lines. Th e circles represent t he inverted apparent resist ivities pha, Pva, and anisotropy coefficient , Aa , computed using the regularized Newton meth od . Figu re 5 presents the TIWL data interpretat ion results for a case of a vertical well (the dip angle a is equal to 0). Figures 6-8 show similar results for the different dip angles 30, 60, and 85 degrees, respect ively. One can observe th e same regulari ty in th ese plots as in Figu res 1-4. The low frequency asymptot ics overestimates the vertical resistivi ties and th e anisotropy coefficient for dip angle values below 45 degrees, and und erestimates these parameters for a dip angle above 60 degrees. T he inversion of TIWL data, based on t he Newton method, provides practically correct reconstruction of the true parameters of th e model within the ent ire range of dip angles (th e curves shown by circles in Figu res 5-8).
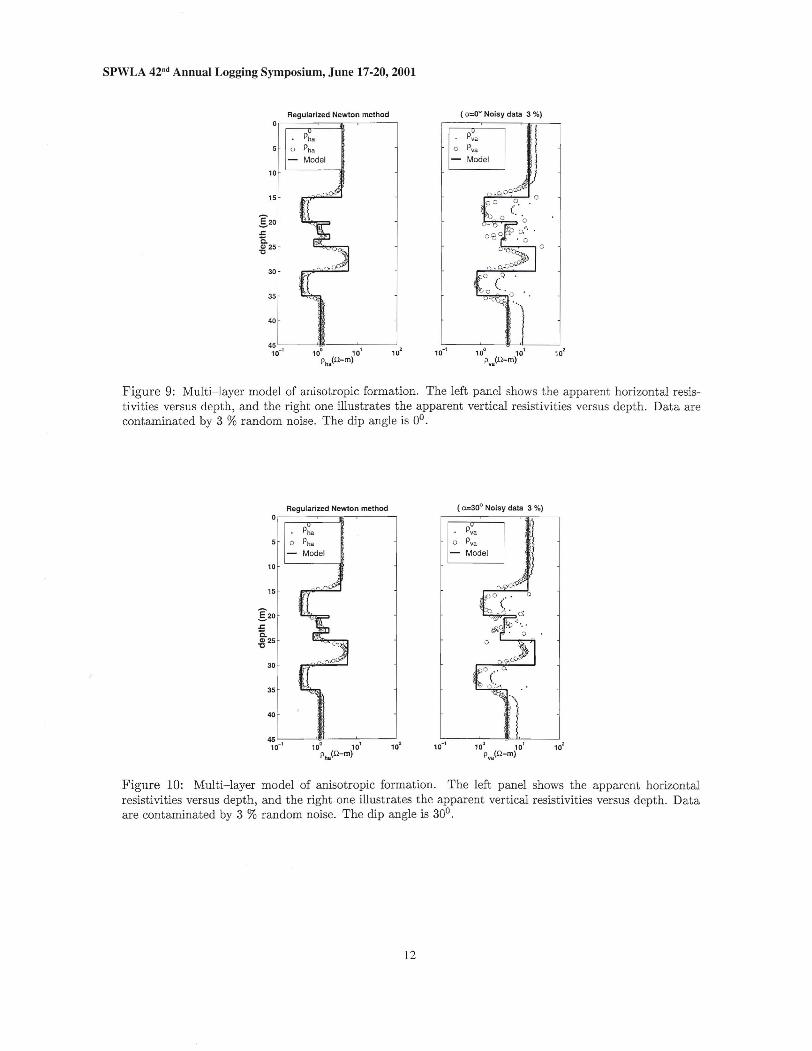
Multi-layer models of anisotropic formations with a dip angle We considered three multi- layered models of anisotropic format ions , based on the well known benchmark models: And erson and Bar ber (1999) model, "Oklahoma" model, and "Chirp" mode l. The first one is a modified model , considered by Anderson and Barber (1999, p.135, Figure 3). The horizontal resisti vity profile of our model is the same as in Anderson and Barber (1999). It is shown by the solid line in the left panel of Figure 9. We int roduced the anisotropic layers in this model with the vertical resist ivity shown by th e solid lines in the right pan el of Figure 9. We simulated the synthet ic data for this model using a library of 3- D Green 's tensors in the layered anisotropic formations (Cheryauka and Zhdanov, 200la) . The data were contaminated by 3% ra ndom Gaussian noise. Figure 9 presents th e TIWL data interpretat ion result s for the case of a vertical well (the dip angle a is equal to 0). Figure 10 present s similar resul ts for the dip angle of 30 degrees . The solid lines show the true parameters of the model. The apparent resistiv it ies and anisot ropy coefficient, P~a ' P~a ' and A~ , obtained by th e low frequ ency asymptotics, are shown by the dotted lines. The circles represent the invert ed apparent resistivities Pha , Pva, and anisot ropy coefficient , Aa , computed using the Newton method.
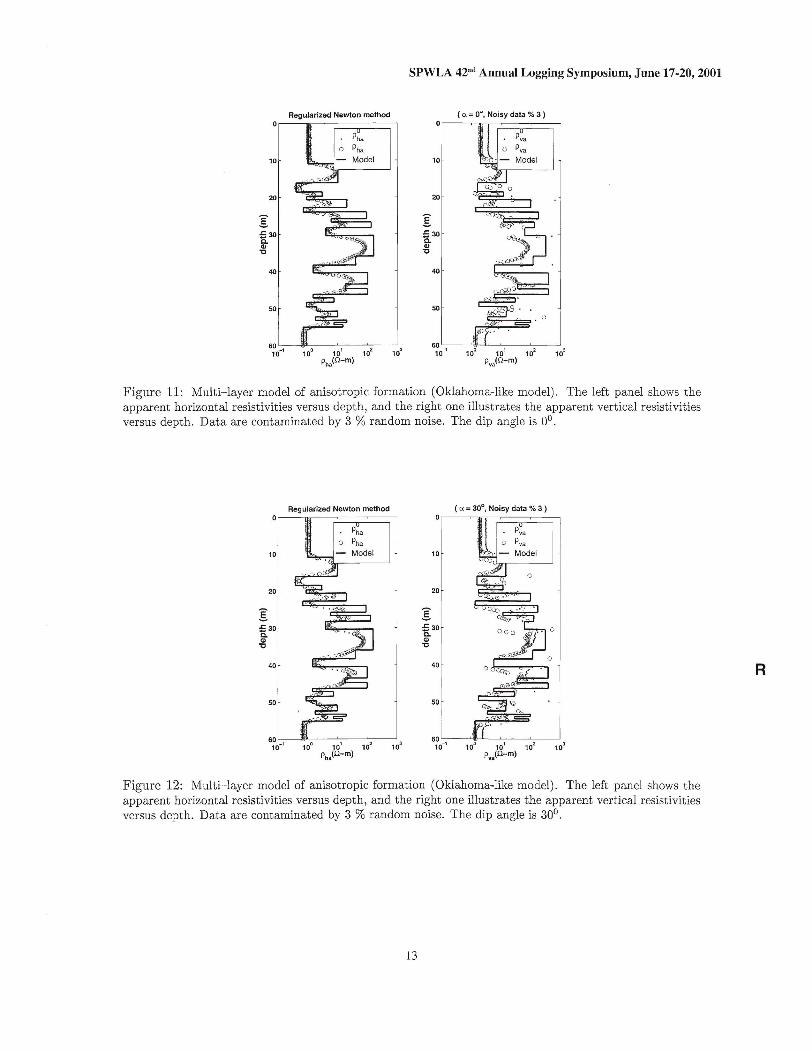
The second multi- layered model is the "Oklahoma" model (Bar ber et aI., 1999). In our anisotropic mod el we use the same horizontal resistivity as in the original "Oklahoma" model (solid
6
line in th e left panel of Figure 11) but we also add some an isotropy to the model by assigning various vertical resistivities (solid line in the right panel of Figure 11). The comput er simulated data for this model with 3% random noise added were processed using the TIWL interpretation technique out lined above. Th e results of interpretation for t he dip angles of 0 and of 30 degrees are presented in Figure 11 and 12. One can see that we can reconstruct well the horizont al resisti vity distribution, while the vertical resistivi ty is mostly underestimated in th is case.
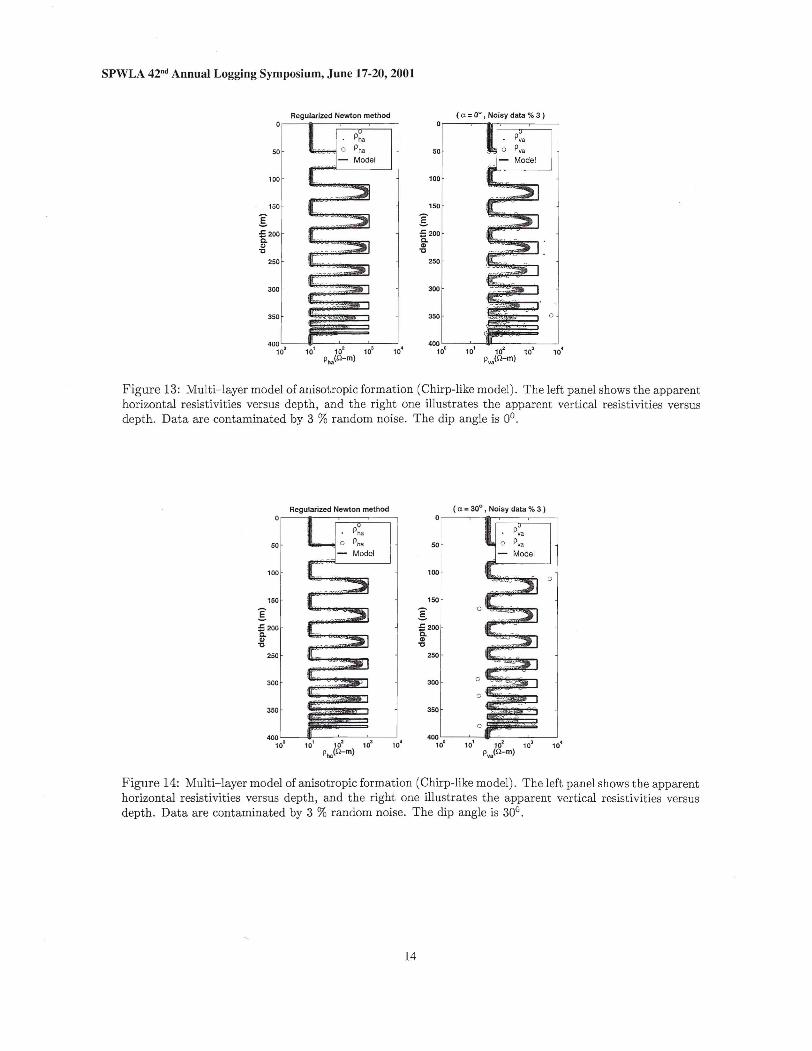
The third model is the "Chirp" model (Fang and Wang, 2000), represented by a solid line in the left panel of Figure 13 (the hor izont al resistivity profile). We modified thi s model, adding a profile of vertical resistivity (right panel in Figure 13). The results of the synthetic TIWL data int erpretation for different dip angles are shown in Figur es 13-14. Once again the ap parent resistivities describe well the horizontal resist ivity, but recover the vertical resistivity much less successfully. These results show t hat, in the case of complicated geoelectri cal mode ls, the simple interpretation tool based on the apparent resistivity mode l cannot well resolve the different anisotropic layers. In this case one should use more advanced technology based on multilayered inversion . Some element s of this development are discussed in the paper by Cheryauka and Zhdanov (2001b) .
CONCLUSIONS
In th is paper we examined the basic principles of tensor induct ion well logging (TIWL) in the deviated boreho le in anisot ropic layered formations. We introduced a simp le technique of TIWL data interpretat ion based on calcu lat ing the components of the apparent conductivity tensor ("horizontal" and "vertical" apparent conduct ivity ). In th e case of low frequency asymptotics, we can use the analytical expressions for apparent cond uct ivity (or resist ivity) tensor calculat ions. In the higher frequency range, one can use a regularized Newton method to genera te the corresponding apparent conductivities (or resistivities) of t he anisotropic media.
We analyzed th e responses of synthetic tensor induction logs in the deviated borehole through two-, three-, an d multi-layer anisotropic formations in vertical and deviated wells using numerical simulation. Our results demonstrate that the tensor instrument is sensitive to ani sotropic parameters of geological formations . These cannot be detected in a general case by conventional indu ction logging.

SPWLA 42nd Annual Logging Symposium, June 17-20, 2001
At the same t ime, we found that the simple inte rpretation too l based on the apparent resistivi ty model cannot well resolve th e different anisotropic layers in the case of th e compl icated geoelectrical mode ls. There is a need to develop a more advanced technology for TIWL dat a int erpretation based on multi layered inversion.
ACKNOWLEDGMENTS
Th e authors acknowledge the support of the University of Utah Consortium for Electromagnetic Modeling and Inversion (CEMI) , which includ es AGIP, Baker Atlas Logging Services, BHP Minerals, ExxonMobil Upstream Resear ch Company, INCO Exploration, International Energy Services, J apan Nat ional Oil Corp oration , MINDECO , Naval Research Laboratory, Rio Tinto-Kennecot t , Sumitomo Metal Mining Co., and 3JTech Corporation.
REFERENCES
Anderson , B. and T. D. Barb er, 1999, Deconvolu t ion an d boost ing parameters for obsolete Schlumberger induction tools: The Log A nalyst, 40 , No 2 (March-April), 133-137.
Barb er , T. D. , Broussard, T ., Minerbo, G. N. Sijercic, Z. and D. Mur gatroyd, 1999, Interpretation of mult iarray induct ion logs in invaded form ations at high relative dip angles: The Log Analyst , 40, No 3 ( May-June), 202 - 217.
Fang, S., and T. Wang, 2000, Accurate Born simulation of indu ction response using an opt imal background: SEG 2000 Expand ed Abstracts, Calgary, 1806-1809.
Cheryauka, A. and M. S. Zhdanov, 2001a, Elect romagnetic tensor Green's funct ions in transverse isot ropic layered media: IEEE Transa ction s on Geoscience and R emote Sensing, in submission.
Cheryauka , A. and M. S. Zhdanov, 2001b , Focusing inversion of tensor induction logging data in a deviated well in layered anisotropic formations: Petrophysics, in submiss ion.
Zhdanov, M. S., 1993, Tutorial: Regularizati on in inversion t heory; Colorado School of Mines, Golden , Colorado, CWP-136,47pp.
Zhdanov, M. S., Kennedy, D., and E. Peksen, 2001, Foundations of tensor induct ion well logging: Petrophysics, in press.
ABOUT THE AUTHORS
Michael S. Zhdanov joined th e University of Utah as a full professor in 1993. He has been Director of the Consortium for Electromagnetic Modeling and Inversion since 1995. He received a Ph.D. in 1970 from Moscow State University. He spent more than twenty years as a professor at the Moscow Academy of Oil and Gas, and as the head of th e Department of Deep Electromagnet ic Study and as Deputy Director of IZMIRAN, and later as Director of the Geoelectromagnetic Resear ch Insti tu te of the United Institute of Physics of the Ea rth, Russian Academy of Science, Moscow, Russia, before moving to the Univers ity of Utah. In 1990 he was awarded an Honorary Diploma of Gauss P rofessorship by the Gottingen Academy of Sciences, Germany. In 1991 he was elected Full Member of the Russian Academy of Natural Sciences. He became Honorary P rofessor of the China Natio nal Center of Geological Exploration Technology in 1997.
w. David Kennedy See biography in P etrophysics, volume 42, no 2, 2001.
Arvidas B. Cheryauka received his M.Sc. in Geophysics from the Novosibirsk State University, Russia in 1986 and a Ph.D in Geophysics .from Institute for Geophysics, Siberian Branch of Russian Academy of Sciences in 1989. From 1995-1998 he worked as a consult ant for LOOCH Geophysical Engineer ing and Baker Atlas companies. During 19981999, Arvidas was a visit ing scientist with Tohoku University in Sendai , J apan. Since 1999 he has been workin g as a research scienti st wit h Consortium for Electromagnet ic Modeling and Inversion, University of Utah on the development of new ar ray technologies for subsurface and well-logging sensing. R Ertan Peksen is a PhD student at the Consor t ium for Electromagnetic Modeling and Inversion, the University of Ut ah . He graduated in 1993 (BS) from th e University of Ankara, in geophysics. He received his Master of Science degree in geophysics from the Department of Geology and Geophysics, the University of Utah, in 1999. His research interest is modeling and inversion of tensor induction well logging in anisotropic media.
7
SPWLA 42nd Annual Logging Symposium, June 17-20, 2001
Model ° l~-~--
1:;:20 kHz
T-R=1 m fi z= 0.2 5 m Ct :;: 0 degrees
_10 !phl =1 n-m .§. IPvl :;: 1 O:- m
.s::: Q.
1 il m~ IPh2 ::: 15 ~V2 =5 n-m
20
25 LI __~_-,
Regularized Newton method ( Noisy data 3 %)
,, ,.
'i 1 "
f '. , : : , ~
! \:
" ~ ~ .. . ,I ~ t I: :
, .' 1 !
A' . P~a . a'Pha o Aao Pha o Pya
- Model- Model - Model
~ 510' la'
Pha(Q- m) pv.(Q- m)
Figure 1: Th e first panel on the left shows a two- layer an isotropic model with resisti vities Ph I = 10 m, Pvl = 10 m, Ph 2 = 10 m, and Pv2 = SOm. The second and third panels present th e app arent resistivity curves versus depth. The last panel displays th e apparent anisotropy coefficient values. Data are contaminated by 3 % random noise. The dip angle is 0°.
Model a
11=20 kHz T. R: ' m 6 z= O.25 m a :;: 30 degreesI
_,:I... t n- rn
g ~" : , ,, -m s:
~ Ipn2 ::: 1Q-m
't:J1S fPv2= s O-m
20
25 LI --~---'
Regularized Newton method ( Noisy data 3 %)
'.
:: : ~ i >;
i
' f \
"
; ;
. Pha
o Pha
- Model
) : , J ~
::j
J - ' ):
It, ~ .( -,
\ : ~ ) ~il ,: ~ }
. P ~a o Pya
- Model
I
; '
4-ci-. ~ . ": t :':.j
j }
• Aa o Aa - Model
" . io" la' a
Ph. (Q- m) p,.(Q- m)
F igure 2: The first panel on the left shows a two- layer anisot ropic model wit h resistivi ties Phl = 10m, Pv l = 10m, Ph2 = 10m, and Pv2 == SOm. The second and third panels present the apparent resist ivity curves versus depth. T he last panel displays the apparent anisotropy coefficient values. Data are contaminat ed by 3 % random noise. The dip angle is 30°.
8
SPWLA 42nd Annual Logging Symposium , June 17-20, 2001
Model O....--~-~,
1=20 kHz T-R=1 m 6 2= 0.25 m (l :;;; 60 degrees
5 "
Regul arized Newton method ( Noisy data 3 %) ~
,I ,It
>~
\ C:1.:;11~ ~ :: j. \'.~" ': 5
'~ >;
"I" r 20 . A. Pya I ·Pha
: a
C Aa(; Pya D Pha
- Model - Model - Model
I . > 25 L.--~----'
'0' '0' Ph. (fl- m) p, . (fl- m)
Figure 3: The first panel on th e left shows a two-layer anisot ropic model with resistivit ies Phl = 10 m, Pvl = 10m, Ph 2 = 10 m, and poz = 50 m. The second and third panels present th e appare nt resistivity curves versus depth. The last panel displays the apparent anisot ropy coefficient values. Dat a are contaminat ed by 3 % random noise. The dip angle is 60°.
Model O....--~--..,I
1;20 kHz
T-R =1 m li.z- O.25 m Q =85 degrees
5 "
~ ,olPh, = 1 n-m ~ Ip" = 1 !l- m
~ !Ph2= 1n - m 1 5 ~V2 = 5 n-m
20
2SL.__~_-JI
Regularized Newton method ( Noisy data 3 %)
>'e
,
~
::\ i:>': ' ~
• Pha
C Pha
- Model ,
,n H I,:
'1 1 :1
i\ t.,.
~ ~ .:'(, >! ~:: I
fpa o Pya - Model
; '
k
T f. I .. . \
: i.
f A
a o Aa
- Model
R
o10' 10' Ph. (fl- m) pv. (fl- m)
F igure 4: The first panel on the left shows a two-layer anisotropic model with resistivity Ph l = 10 m, Pvl = 10 m, Ph2 = 10m, and Pv2 = 50m. The second and third panels present the apparent resistivity curves versus depth. The last panel displays th e appare nt anisotropy coefficient values. Dat a are contamina ted by 3 % random noise. The dip angle is 85°.
9
SPWLA 42nd Annual Logging Symposium, June 17-20,2001
Model Regularized Newton method ( Noisy data 3 'Yo)
P =1 Q- m hl
Pvl ::. 1 Q- m
~10c' --
" i
"
:
' [
,
! i
~
' Pha c Pha
- Model
.:
'I ':
:1 ':':' :
~~ " ,
w'" l ~
'I • Pya
o Pya - Model
'4a )~ Iph,=,n_m a. pv2= sn- m .g h2=5m ,(I , . '
15-- rrPh'=' n-m ~ Pv3= 1 Q- m
I20 )Y
, a
o "'a - Model
25 LI _ _ ~_---,
10' 10' Pha(Q- m) pva(Q- m)
Figure 5: T he first panel on the left shows a t hree-layer anisot ropic model. Th e thickness of the pay zone is 5m with t he resisti vities Ph2 = 10m, and Pv2 = 50m. T he second an d third panels present the apparent resisti vity curves versus depth. Th e last panel displays the apparent anisotropy coefficient values. Dat a are cont ami nated by 3 % random noise. Th e dip angle is 00
.
Model 0
1=20 kHz
T-R=l m
A z= O.25 m a = 30 degr ees
5
Ph' =1 n-m Pvt =1 Q- m
_1 0
.§. s: [Ph' .ln-m
pv2 = S fi - m 1i. III h2=5 m "0
1 ; Ph3 ;;; 1 Q- m Pv3= t Q- m
)
;
RegUlarized Newton method ( Noisy data 3 'Yo)
I:
i I:
~~ .
:; ~ 'f ~ .
,7"
,'\ . Pya
o Pya - Model
, "
~
'j
[
. ~
f'
lh-<;1" \
,.i ,:}
i 0'
il' i I, ;
] 1
)Y . a
Phao Pha o "a 1- Mod el - Model
10' 10' Pha(Q-m) pva(Q- m)
F igure 6: T he first panel on the left shows a three-layer anisot ropic model. T he thickness of the pay zone is 5m wit h the resistivi ti es Ph2 = 10m, and Pv2 = 50 m. The second and third panels present the apparent resistivi ty curves versus depth. Th e last panel displays the ap parent anisotropy coefficient values. Dat a are cont aminated by 3 % random noise. Th e dip angle is 300
.
10
Model 0
1=20kHz
T-R=1 m lJ. z= O.25 m a = 60 degrees
;
Ph1= 1Q- m P :::; 1 n-m
v1
1
Ph2 = 1 Q- m
pv: ::: S Q- m
h2 =5m
1 ; PJ13;: 1 Q- m
Pv3 :::1 Q- m
1
2S
~1
.§.
.t: Q.., '0
SPWLA 42nd Annual Logging Symposium, June 17-20, 2001
Regularized Newton method ( Noisy data 3 %)
,
:1
g .~
~ rf ; ~
, ,:
• Pha o Pha
- Model
'. 10'
Pha(Q-m)
" ,:
;: 1
, D!
:,1 . Pya
o Pya
- Model
I:t.... ~'t-
;>,
~
)!• a
o i'a - Model
10' pv.(Q- m)
F igure 7: The first panel on the left shows a three-layer anisot ropic model. The thickness of t he pay zone is Sm with the resistivities Ph2 = 1l1m, and Pv2 = SOm. The second and third panels present t he apparent resisti vity curves versus depth. The last panel displays the apparent an isotropy coefficient values. Dat a are contaminated by 3 % random noise. The dip angle is 60°.
Model 0
1=20 kHz
T-R=l m !J.z=0.25 m 0: .: 85 degrees
S
P = 1 Q-mhl Pvl ;: 1 Q- m
1
Ph2 = 1 Q-m Pv2 :::S Q-m
h2=5 m
; Ph3:::1 D:- m Pv3 = 1 Q- m
1
;
~1
.§. s: Q.., '0
1
RegUlarized Newton method ( Noisy data 3 %)
~ .:' ,: ·,1
I ~
r 11
~--~, .....--fOi---
.
• Pha o Pha
- Model
10' Ph. (Q- m)
i '1 , .'~ \ : .:
'1 . ':. .'
-
1 #.." ~
, : R '1
)!. Pya • a
o Pya C A.a - Model Model
:
10' pv.(Q- m)
Figure 8: The first panel on t he left shows a three-layer anisot ropic model. The thickness of t he pay zone is Sm with the resistiv iti es Ph2 = 10m, and Pv2 = SOm. The second and third panels present t he apparent resistivity curves versus depth. The last panel displays th e appare nt anisot ropy coefficient values. Data are contaminated by 3 % random noise. The dip angle is 8So.
11
SPWLA 42nd Annual Logging Symposium, June 17-20,2001
Regular ized Newton method -
P~a o Pha - Model
I 10
15
:[20
s: Q. <l> 25 "C
30
35
40
45
( <>=0" Noisy data 3 %)
Pva o Pva
Model
o
10~ 110- 1 10° 10' 10' 10° 101 10'
Pha(n- m) pva(n - m)
F igure 9: Mult i-layer model of anisotropic format ion. The left panel shows the apparent hor izontal resist ivities versus depth, and t he right one illustrates the apparent ver tical resist ivit ies versus depth. Data are contaminated by 3 % random noise. The dip angle is 0°.
Regularized Newton method ( <>=300 Noisy data 3 %)
~
o
;) Pva · I ~. o5 0 Pha Pva
Model r - Model 110 }
",&" "~ 15
:[20
s: Q. <l> 25
"C
30
35
40
45 10-1 10' 10' 10' 10-1
10° 101 10' Pha(n- m) pv.<n- m)
Figure 10: Multi- layer model of anisot ropic formation. The left panel shows the apparent horizontal resistivit ies versus depth, and th e right one illust rates the ap parent vert ical resistivities versus depth. Data are contaminated by 3 % ra ndom noise. The dip angle is 30°.
12
Regular ized Newto n method o --rl "
Pha
o PM 10
20
g J: 30 g. "tl
40
50
60 i!:l 2' -1 1 210-1 lOU 101 10 10' 10 . 10 10 10' Ph.(Q-m) pvo(Q-m)
F igure 11: Mult i-layer model of anisotropic formation (Oklahoma-like model). Th e left panel shows t he apparent horizontal resistivities versus depth, and the right one illustrates the apparent vert ical resistiv ities versus depth. Data are contaminated by 3 % rand om noise. The dip angle is 0°.
SPWLA 42nd Annual Logging Symposium, June 17-20, 2001
( (J, = 0", Noisy dala % 3 )
10
20
g J: 30 a. CI> "tl
40
50
60' ' II! I I
o
Regular ized Newton method
60 ' IJII 10-1 10° 10
1 10
2 10' 10-1 to" 101
102 10'
Ph.(Q- m) pv. (Q- m)
F igure 12: Mult i- layer model of anisotropic formation (Oklahoma-like model) . The left panel shows the apparent horizontal resist ivities versus depth , an d the right one illust rates the apparent vert ical resistivities versus depth. Data are contaminated by 3 % random noise. The dip angle is 30°.
( (J, =30°, Noisy dala % 3 )
pv•
o Pya 10
20
g a30
Q)
"tl
40 R
50
60 ' ''I f I
o
10
20
g a30
CI> "tl
40
50
~~-;:::=:::.:;;::::::'====; . Pha
o Pha
- Model
. ~
13
SPWLA 42nd Annual Logging Symposium, June 17-20, 2001
50
100
150
:[ -a 200 Q)
"C
250
300
350
Pha Pha Model
400L--1I 2 310°
Regularized Newton method
I , "
I10' 10 10 10' PhaCQ- m)
Figure 13: Multi-layer model of aniso tropic form ation (Chirp-like model). The left pa nel shows the apparent horizontal resistivities versus depth, and t he right one illustrat es t he apparent vertical resistivities versus depth. Dat a are contamina ted by 3 % random noise. The dip angle is 00.
50 ,
100 f
150
:[ :5 200 e, Q) "C
250
300
Regularized Newton method
Pha
~ o Pha Model
ill
,.,- _. ., ~~
( ex = 0'", Noisy data % 3 )
01 Ib I ' Ii
50
100
150
:[ :a200
Q)
"C
250
300
350
Pva
o Pva
- Mode l
2 310 10
p,.(Q- m)
o
Cex ; 30° • Noisy data % 3 ) 0
p,.
50 0 P,a - Model
100 0
~150i 0
.§..
a200
Q) "C
250
~' ..i
~L350
0:::Uit?: : 1 400 ,~ 1~ 1 ~ 1~ 10' 100 10' 10' 10' 10'
PhaCQ-m) p,.(Q- m)
Figure 14: Multi-layer model of anisotropic forma tion (Chirp-like model) . The left panel shows th e apparent horizontal resistivities versus depth, and the righ t one illustrates the apparent vertical resistivities versus depth. Dat a are contamina ted by 3 % random noise . The dip angle is 300 .
14


![Application of differential effective medium, magnetic ... · [1] A differential effective medium (DEM) model is used to predict elastic properties for a set of porous and anisotropic](https://img.pdfslide.net/doc/110x75/5fbef87136a77a10ff711f01/application-of-differential-effective-medium-magnetic-1-a-differential-effective.jpg)


![Lifetime reduction of a quantum emitter with quasiperiodic ...sspp.phys.tohoku.ac.jp/tomita/doc/paper/moritake14PRB.pdf · waveguides [19–22]. HMM is a highly anisotropic medium](https://img.pdfslide.net/doc/110x75/60e1837383eb1f5de9746381/lifetime-reduction-of-a-quantum-emitter-with-quasiperiodic-ssppphys-waveguides.jpg)























